Джерк (физика)
Эта статья включает список общих ссылок , но в ней отсутствуют достаточные соответствующие встроенные цитаты . ( Март 2020 г. ) |
| Придурок | |
|---|---|
 Производные по времени от позиции, включая рывок | |
Общие символы | j , j , ş → |
| В базовых единицах СИ | РС 3 |
| Измерение | Л Т −3 |
В физике рывок толчок (также известный как ) объекта — это скорость изменения ускорения с течением времени. Это векторная величина (имеющая как величину, так и направление). Рывок чаще всего обозначается символом j и выражается в м/с. 3 ( единицы СИ ) или стандартные силы тяжести в секунду ( г 0 /с).
Выражения [ править ]
В качестве вектора рывок j можно выразить как первую производную ускорения по времени , вторую производную скорости по времени третью и производную по положения времени :

Где:
- а - ускорение
- v - скорость
- г - позиция
- пришло время
третьего порядка Дифференциальные уравнения вида

эффекты и Физиологические восприятие человеческое
Положение тела человека контролируется путем уравновешивания сил мышц-антагонистов . Уравновешивая заданную силу, например, удерживая вес, постцентральная извилина устанавливает контур управления для достижения желаемого равновесия . Если сила меняется слишком быстро, мышцы не могут расслабиться или напрячься достаточно быстро и перескакивают в любом направлении, что приводит к временной потере контроля. Время реакции на изменение силы зависит от физиологических ограничений и уровня внимания мозга: ожидаемое изменение стабилизируется быстрее, чем резкое снижение или увеличение нагрузки.
Чтобы пассажиры транспортных средств не потеряли контроль над движением тела и не получили травм, необходимо ограничить воздействие как максимальной силы (ускорения), так и максимального рывка, поскольку необходимо время для корректировки мышечного напряжения и адаптации даже к ограниченным изменениям нагрузки. Внезапные изменения ускорения могут стать причиной таких травм, как хлыстовая травма . [2] Чрезмерный рывок также может привести к дискомфорту при езде, даже на уровнях, не вызывающих травм. Инженеры затрачивают значительные усилия на проектирование, чтобы свести к минимуму «рывки» в лифтах , трамваях и других транспортных средствах.
Например, рассмотрим последствия ускорения и рывка при езде на автомобиле:
- Умелые и опытные водители могут плавно ускоряться, но новички часто обеспечивают рывковую езду. При переключении передач в автомобиле с ножным сцеплением разгонная сила ограничена мощностью двигателя, но неопытный водитель может вызвать сильный рывок из-за прерывистого принудительного замыкания сцепления.
- Ощущение вдавливания в сиденья мощного спортивного автомобиля возникает из-за ускорения. Когда автомобиль трогается с места, происходит сильный положительный рывок, поскольку его ускорение быстро увеличивается. После старта происходит небольшой устойчивый отрицательный рывок, поскольку сила сопротивления воздуха увеличивается с увеличением скорости автомобиля, постепенно уменьшая ускорение и уменьшая силу, прижимающую пассажира к сиденью. Когда автомобиль достигает максимальной скорости, ускорение достигает 0 и остается постоянным, после чего рывков не происходит до тех пор, пока водитель не замедлит ход или не изменит направление.
- При резком торможении или во время столкновения пассажиры бросаются вперед с начальным ускорением, которое больше, чем во время остальной части процесса торможения, поскольку мышечное напряжение быстро восстанавливает контроль над телом после начала торможения или удара. Эти эффекты не моделируются при испытаниях транспортных средств, поскольку трупы и манекены для краш-тестов не имеют активного мышечного контроля.
- Чтобы минимизировать рывок, кривые вдоль дорог проектируются как клотоиды, как и кривые железных дорог и петли американских горок .
Сила, ускорение и рывок [ править ]
Для постоянной массы m ускорение a прямо пропорционально силе F согласно второму закону движения Ньютона :

В классической механике твердого тела нет сил, связанных с производными ускорения; однако физические системы испытывают колебания и деформации в результате рывков. При разработке космического телескопа «Хаббл» НАСА установило ограничения как на рывки, так и на толчки . [3]
Сила Абрагама-Лоренца — это сила отдачи ускоряющейся заряженной частицы, излучающей излучение. Эта сила пропорциональна рывку частицы и квадрату ее заряда . Теория поглотителя Уиллера-Фейнмана — более продвинутая теория, применимая в релятивистской и квантовой среде и учитывающая собственную энергию .
В идеализированной обстановке [ править ]
Прерывистости ускорения не происходит в реальных условиях из-за деформации , эффектов квантовой механики и других причин. Однако скачок-разрыв ускорения и, соответственно, неограниченный рывок возможны в идеализированной ситуации, например при идеализированной точечной массы движении по кусочно- гладкому цельно-непрерывному пути. Скачок-разрыв возникает в точках, где путь не является гладким. Экстраполируя эти идеализированные условия, можно качественно описать, объяснить и предсказать последствия рывков в реальных ситуациях.
Скачок-разрыв при ускорении можно смоделировать с помощью дельта-функции Дирака в рывке, масштабированной по высоте прыжка. Интегрирование рывка во времени через дельту Дирака дает скачок-разрыв.
Например, рассмотрим путь по дуге радиуса r , которая по касательной соединяется с прямой линией. Весь путь непрерывен, а его куски гладкие. Теперь предположим, что точечная частица движется по этому пути с постоянной скоростью, поэтому ее тангенциальное ускорение равно нулю. Центростремительное ускорение, определяемое формулой v 2 / r нормально к дуге и внутрь. Когда частица проходит соединение частей, она испытывает скачок-разрыв ускорения, определяемый формулой v 2 / r , и он испытывает рывок, который можно смоделировать с помощью дельты Дирака, масштабированной до скачка-разрыва.
В качестве более наглядного примера прерывистого ускорения рассмотрим идеальную систему пружина-масса , в которой масса колеблется на идеализированной поверхности с трением. Сила, действующая на массу, равна векторной сумме силы пружины и кинетической силы трения . Когда скорость меняет знак (при максимальном и минимальном перемещениях ), величина силы, действующей на массу, изменяется в два раза больше, чем сила трения, поскольку сила пружины непрерывна, а сила трения меняет направление со скоростью. Скачок ускорения равен силе, действующей на массу, деленной на массу. То есть каждый раз, когда масса проходит через минимальное или максимальное смещение, масса испытывает прерывистое ускорение, и рывок содержит дельту Дирака до тех пор, пока масса не остановится. Сила статического трения адаптируется к остаточной силе пружины, устанавливая равновесие с нулевой результирующей силой и нулевой скоростью.
Рассмотрим пример торможения и замедления автомобиля. Тормозные колодки создают кинетические силы трения и постоянный тормозной момент на дисках (или барабанах ) колес. Скорость вращения линейно уменьшается до нуля при постоянном угловом замедлении. Сила трения, крутящий момент и замедление автомобиля внезапно достигают нуля, что указывает на дельту Дирака при физическом рывке. Дельта Дирака сглаживается реальной средой, совокупный эффект которой аналогичен затуханию физиологически воспринимаемого толчка. В этом примере не учитываются эффекты скольжения шин, провалов подвески, реального отклонения всех идеально жестких механизмов и т. д.
Другой пример значительного рывка, аналогичный первому примеру, — это перерезание веревки с частицей на конце. Предположим, что частица колеблется по круговой траектории с ненулевым центростремительным ускорением. Когда веревка перерезается, путь частицы резко меняется на прямой, а сила, действующая внутрь, внезапно становится равной нулю. Представьте себе мономолекулярное волокно, разрезанное лазером; частица будет испытывать очень высокие рывки из-за чрезвычайно короткого времени резки.
В ротации [ править ]
Рассмотрим твердое тело, вращающееся вокруг неподвижной оси в инерциальной системе отсчета . Если его угловое положение как функция времени равно θ ( t ) , угловая скорость, ускорение и рывок могут быть выражены следующим образом:
- Угловая скорость , , является производной по времени θ ( t ) .
- Угловое ускорение , , является производной по времени ω ( t ) .
- Угловой рывок, , является производной по времени α ( t ) .



Угловое ускорение равно крутящему моменту, тела действующему на тело, деленному на момент инерции относительно мгновенной оси вращения. Изменение крутящего момента приводит к угловому рывку.
Общий случай вращающегося твердого тела можно смоделировать с помощью теории кинематического винта , которая включает один осевой вектор , угловую скорость Ω ( t ) , и один полярный вектор , линейную скорость v ( t ) . Отсюда угловое ускорение определяется как

а угловой рывок определяется выражением

взяв угловое ускорение из Углового ускорения#Частицы в трех измерениях как


замена мы можем иметь последний элемент как



или наоборот, заменив с :




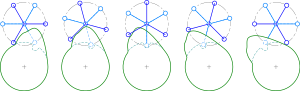
Например, рассмотрим Женевский привод , устройство, используемое для создания прерывистого вращения ведомого колеса (синее колесо в анимации) за счет непрерывного вращения ведущего колеса (красное колесо в анимации). ведомого колеса За один цикл вращения ведущего колеса угловое положение θ изменяется на 90 градусов и затем остается постоянным. Из-за конечной толщины вилки ведущего колеса (прорези для ведущего пальца) это устройство создает скачок углового ускорения α и неограниченный угловой рывок ζ ведомого колеса.
Jerk не исключает возможности использования Женевского привода в таких устройствах, как кинопроекторы и камеры . В кинопроекторах пленка продвигается покадрово, но работа проектора малошумна и отличается высокой надежностью из-за малой загрузки пленки (прогоняется лишь небольшой участок пленки массой несколько граммов), умеренной скорости (2,4 м/с) и низкое трение.
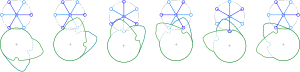
В системах кулачкового привода использование двойного кулачка позволяет избежать рывков одного кулачка; однако двойной кулачок более громоздкий и дорогой. Система с двумя кулачками имеет два кулачка на одной оси, которые смещают вторую ось на долю оборота. На графике показаны ступенчатые передачи на одну шестую и одну треть оборота за один оборот ведущего моста. Радиальный зазор отсутствует, поскольку два плеча ступенчатого колеса всегда контактируют с двойным кулачком. Как правило, комбинированные контакты можно использовать, чтобы избежать рывков (а также износа и шума), связанных с одним толкателем (например, можно избежать скольжения одного толкателя вдоль паза и изменения точки контакта с одной стороны паза на другую, с использованием двух толкателей, скользящих по одной и той же прорези, по одной стороне с каждой).
В упруго деформируемой материи [ править ]

Упруго деформируемая масса деформируется под действием приложенной силы (или ускорения); деформация является функцией его жесткости и величины силы. Если изменение силы происходит медленно, рывок мал, и распространение деформации считается мгновенным по сравнению с изменением ускорения. Искаженное тело действует так, как если бы оно находилось в квазистатическом режиме , и только изменяющаяся сила (ненулевой рывок) может вызвать распространение механических волн (или электромагнитных волн для заряженной частицы); следовательно, при рывке от нуля до высокого следует учитывать ударную волну и ее распространение через тело.
Распространение деформации показано на графике «Картины волн сжатия» как плоская волна сжатия через упруго деформируемый материал. Для углового рывка также показаны волны деформации, распространяющиеся по круговой схеме, что вызывает напряжение сдвига другие виды вибрации и, возможно , . Отражение волн вдоль границ вызывает конструктивные интерференционные картины (не показаны), создавая напряжения, которые могут превышать пределы материала. Волны деформации могут вызвать вибрации, которые могут привести к шуму, износу и выходу из строя, особенно в случаях резонанса.

На рисунке с надписью «Полюс с массивной вершиной» показан блок, соединенный с упругим столбом и массивной вершиной. Шест прогибается при ускорении блока, а когда ускорение прекращается, вершина будет колебаться ( затухать ) в режиме жесткости шеста. Можно утверждать, что более сильный (периодический) рывок может вызвать большую амплитуду колебаний, поскольку небольшие колебания затухают до усиления ударной волной. Можно также утверждать, что больший рывок может увеличить вероятность возбуждения резонансной моды , поскольку более крупные волновые компоненты ударной волны имеют более высокие частоты и коэффициенты Фурье .

Чтобы уменьшить амплитуду возбуждаемых волн напряжения и вибраций, можно ограничить рывки, придав форму движению и сделав ускорение непрерывным с максимально пологими уклонами. Из-за ограничений абстрактных моделей алгоритмы снижения вибраций включают высшие производные, такие как толчок , или предлагают непрерывные режимы как для ускорения, так и для рывка. Одна из концепций ограничения рывков состоит в том, чтобы формировать ускорение и замедление синусоидально с нулевым ускорением между ними (см. рисунок под заголовком «Профиль синусоидального ускорения»), в результате чего скорость выглядит синусоидальной с постоянной максимальной скоростью. Однако рывок останется прерывистым в точках, где ускорение входит в нулевую фазу и выходит из нее.
В геометрическом оформлении дорог и дорожек [ править ]

Дороги и пути спроектированы таким образом, чтобы ограничить рывки, вызванные изменениями их кривизны. Нормы проектирования высокоскоростных железных дорог варьируются от 0,2 м/с. 3 до 0,6 м/с 3 . [4] Кривые перехода трассы ограничивают рывки при переходе с прямой на кривую и наоборот. Напомним, что при движении по дуге с постоянной скоростью ускорение равно нулю в тангенциальном направлении и отлично от нуля в направлении внутрь, по нормали. Кривые перехода постепенно увеличивают кривизну и, следовательно, центростремительное ускорение.
Спираль Эйлера , теоретически оптимальная кривая перехода, линейно увеличивает центростремительное ускорение и приводит к постоянным рывкам (см. рисунок). В реальных приложениях плоскость пути наклонена вдоль изогнутых участков. Наклон вызывает вертикальное ускорение, которое учитывается при проектировании с учетом износа пути и насыпи. Wiener Kurve (Венская кривая) — это запатентованная кривая, разработанная для минимизации износа. [5] [6]
Американские горки [2] также разработаны с переходами гусениц для ограничения рывков. При входе в петлю значения ускорения могут достигать около 4 g (40 м/с). 2 ), а езда в таких условиях с высоким ускорением возможна только при переходах через трассу. S-образные кривые, такие как восьмерки, также используют переходы трасс для плавного движения.
В управлении движением [ править ]
При управлении движением основное внимание при проектировании уделяется прямолинейному движению с необходимостью перемещения системы из одного устойчивого положения в другое (движение от точки к точке). Проблема проектирования с точки зрения рывка - это вертикальный рывок; рывок из-за тангенциального ускорения фактически равен нулю, поскольку линейное движение не является вращательным.
Приложения для управления движением включают пассажирские лифты и обрабатывающие инструменты. Ограничение вертикального рывка считается важным для удобства езды на лифте. [7] ИСО 8100-34 [8] определяет методы измерения качества езды лифта с учетом рывков, ускорения, вибрации и шума; однако стандарт не определяет уровни приемлемого или неприемлемого качества езды. Сообщается [9] что большинство пассажиров оценивают вертикальный рывок в 2 м/с. 3 приемлемо и 6 м/с 3 как невыносимо. Для больниц 0,7 м/с 3 это рекомендуемый предел.
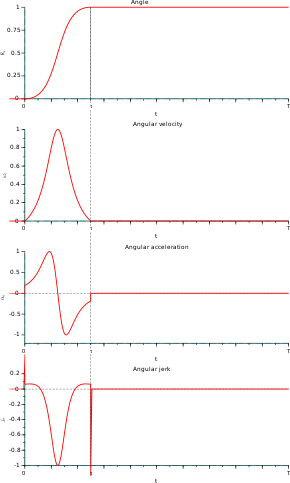
Основная цель разработки управления движением — минимизировать время перехода без превышения пределов скорости, ускорения или рывков. Рассмотрим профиль управления движением третьего порядка с квадратичными фазами линейного и замедленного изменения скорости (см. рисунок).
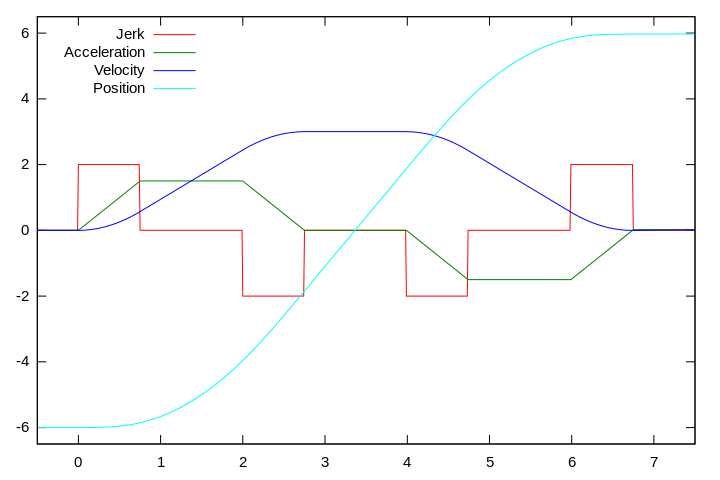
Этот профиль движения состоит из следующих семи сегментов:
- Наращивание ускорения — положительный предел рывка; линейное увеличение ускорения до положительного предела ускорения; квадратичное увеличение скорости
- Верхний предел ускорения — нулевой рывок; линейное увеличение скорости
- Снижение ускорения — отрицательный предел рывка; линейное снижение ускорения; (отрицательное) квадратичное увеличение скорости, приближающееся к желаемому пределу скорости
- Ограничение скорости — нулевой рывок; нулевое ускорение
- Нарастание замедления — отрицательный предел рывка; линейное снижение ускорения до предела отрицательного ускорения; (отрицательное) квадратичное уменьшение скорости
- Нижний предел замедления — нулевой рывок; линейное уменьшение скорости
- Снижение замедления — положительный предел рывка; линейное увеличение ускорения до нуля; квадратичное уменьшение скорости; приближение к желаемому положению с нулевой скоростью и нулевым ускорением
Период времени четвертого сегмента (постоянная скорость) варьируется в зависимости от расстояния между двумя позициями. Если это расстояние настолько мало, что пропуска четвертого сегмента будет недостаточно, то второй и шестой сегменты (постоянное ускорение) могут быть одинаково уменьшены, и предел постоянной скорости не будет достигнут. Если эта модификация не уменьшит в достаточной степени пересекаемое расстояние, то сегменты первый, третий, пятый и седьмой могут быть сокращены на равную величину, и пределы постоянного ускорения не будут достигнуты.
Используются другие стратегии профиля движения, такие как минимизация площади рывка для заданного времени перехода. [10] и, как обсуждалось выше, профили ускорения синусоидальной формы. Профили движения адаптированы для конкретных применений, включая машины, средства передвижения людей, цепные тали, автомобили и робототехнику.
В производстве [ править ]
Рывок является важным фактором в производственных процессах. Быстрые изменения ускорения режущего инструмента могут привести к преждевременному износу инструмента и неравномерному резу; следовательно, современные контроллеры движения включают функции ограничения рывков. В машиностроении рывок, помимо скорости и ускорения, учитывается при разработке профилей кулачков из-за трибологических последствий и способности приводного тела следовать профилю кулачка без вибрации . [11] Рывок часто рассматривается, когда возникает проблема с вибрацией. Устройство, измеряющее рывок, называется «джеркметр».
производные Дальнейшие
Другие производные по времени также были названы, как щелчок или отскок (четвертая производная), треск (пятая производная) и хлопок (шестая производная). [12] [13] Однако производные по времени от позиции более высокого порядка, чем четыре, появляются редко. [14]
Термины «щелкнуть» , «трескаться » и «поп» — «четвертая, пятая и шестая производные позиции» — были вдохновлены рекламными талисманами «Snap», «Crackle» и «Pop» . [13]
См. также [ править ]
Ссылки [ править ]
- ^ Хлуверакис, Константинос Э.; Спротт, Дж. К. (2006). «Хаотические системы гиперрывков» (PDF) . Хаос, солитоны и фракталы . 28 (3): 739–746. Бибкод : 2006CSF....28..739C . дои : 10.1016/j.chaos.2005.08.019 . Архивировано (PDF) из оригинала 10 марта 2020 г. Проверено 4 февраля 2020 г.
- ^ Jump up to: Перейти обратно: а б «Как все работает: американские горки - Тартан онлайн» . Thetartan.org. 16 апреля 2007 г. Архивировано из оригинала 18 мая 2013 г. Проверено 15 сентября 2013 г.
- ^ «Третья производная положения» . math.ucr.edu . Архивировано из оригинала 30 ноября 2016 г. Проверено 8 сентября 2019 г.
- ^ Обзор литературы по стрелочным переводам высокоскоростных железных дорог (PDF) (Отчет). Министерство транспорта США – Управление исследований, разработок и технологий. Август 2016 г. DOT/FRA/ORD-16/34. Архивировано (PDF) из оригинала 8 ноября 2023 года . Проверено 9 ноября 2023 г.
- ^ https://depatisnet.dpma.de/DepatisNet/depatisnet?window=1&space=menu&content=treffer&action=pdf&docid=AT000000412975B [ мертвая ссылка ]
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 13 марта 2016 г. Проверено 17 августа 2014 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 26 августа 2014 г. Проверено 22 августа 2014 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ ИСО 8100-34:2021. «Лифты для перевозки людей и грузов. Часть 34. Измерение качества езды в лифте» . Международная организация по стандартизации. Архивировано из оригинала 26 сентября 2022 года . Проверено 31 декабря 2014 г.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Хокинс, Роджер Э. «Качество поездки в лифте - опыт поездки человека» . Издательство ВФЗ для информации целевой аудитории GmbH & Co. KG. Архивировано из оригинала 14 марта 2015 года . Проверено 31 декабря 2014 г.
- ^ Хоган, Невилл (1984). «Организующий принцип класса добровольных движений» . Дж. Нейроски . 4 (11): 2745–2754. doi : 10.1523/JNEUROSCI.04-11-02745.1984 . ПМК 6564718 . ПМИД 6502203 .
- ↑ Блер, Г., «Создание кулачка», Race Engine Technology , 10, сентябрь – октябрь 2005 г.
- ^ Томпсон, Питер М. (март 2011 г.). «Щелчок, треск и хлоп» (PDF) . Материалы конференции AIAA по аэрокосмическим системам и технологиям Южной Калифорнии . п. 1. Архивировано из оригинала (PDF) 4 марта 2017 г. Проверено 29 февраля 2020 г.
Общие названия первых трех производных — скорость, ускорение и рывок. Не столь распространенные названия следующих трех производных — Snap, Crackle и Pop.
- ^ Jump up to: Перейти обратно: а б Виссер, Мэтт (31 марта 2004 г.). «Рывок, щелчок и космологическое уравнение состояния». Классическая и квантовая гравитация . 21 (11): 2603–2616. arXiv : gr-qc/0309109 . Бибкод : 2004CQGra..21.2603V . дои : 10.1088/0264-9381/21/11/006 . ISSN 0264-9381 . S2CID 10468158 .
Snap [четвертая производная по времени] также иногда называют прыжком. Пятую и шестую производные по времени иногда в шутку называют треском и треском.
- ^ Грагерт, Стефани; Гиббс, Филип (ноябрь 1998 г.). «Какой термин используется для обозначения третьей производной положения?» . Usenet Часто задаваемые вопросы по физике и теории относительности . Математический факультет Калифорнийского университета, Риверсайд . Архивировано из оригинала 30 ноября 2016 г. Проверено 24 октября 2015 г.
- Спротт Дж. К. (2003). Хаос и анализ временных рядов . Издательство Оксфордского университета. ISBN 0-19-850839-5 .
- Спротт Дж. К. (1997). «Некоторые простые хаотические функции» (PDF) . Я Дж. Физ . 65 (6): 537–43. Бибкод : 1997AmJPh..65..537S . дои : 10.1119/1.18585 . Архивировано из оригинала (PDF) 13 июня 2010 г. Проверено 28 сентября 2009 г.
- Блэр Дж. (2005). «Создание камеры» (PDF) . Технология гоночных двигателей (10). Архивировано (PDF) из оригинала 15 мая 2008 г. Проверено 29 сентября 2009 г.
Внешние ссылки [ править ]
- Какой термин используется для обозначения третьей производной положения? Архивировано 30 ноября 2016 г. на Wayback Machine , описание рывка в FAQ по физике Usenet. Архивировано 23 июня 2011 г. на Wayback Machine.
- Математика профилей управления движением. Архивировано 2 октября 2020 г. на Wayback Machine.
- Качество езды в лифте. Архивировано 28 марта 2022 г. в Wayback Machine.
- Брошюра производителя лифтов
- Патент Венской кривой
- (на немецком языке) Описание Винер Курве
