Позиция (геометрия)




В геометрии положение вектор или вектор положения , также известный как положения или радиус-вектор , представляет собой евклидов вектор , который представляет точку P в пространстве . Его длина представляет собой расстояние относительно произвольного начала отсчета O , а его направление представляет угловую ориентацию относительно заданных опорных осей. Обычно обозначается x , r или s он соответствует отрезку прямой от O до P. , Другими словами, именно смещение или перевод отображает начало координат в P : [1]

Термин вектор положения используется главным образом в областях дифференциальной геометрии , механики и иногда векторного исчисления .Часто это используется в двумерном или трехмерном пространстве , но может быть легко обобщено на евклидовы и аффинные пространства любой размерности . [2]
Относительное положение
[ редактировать ]Относительное положение точки Q относительно точки P представляет собой евклидов вектор, полученный в результате вычитания двух векторов абсолютного положения (каждого относительно начала координат):

где .

Относительное направление между двумя точками — это их относительное положение, нормализованное как единичный вектор :

где знаменатель - расстояние между двумя точками, .Относительное направление — это связанный вектор , в отличие от обычного направления , которое является свободным вектором .

Определение и представление
[ редактировать ]Три измерения
[ редактировать ]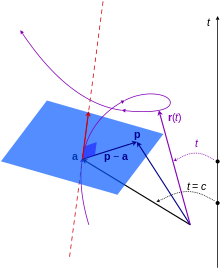
В трех измерениях для определения местоположения точки в пространстве можно использовать любой набор трехмерных координат и соответствующих им базисных векторов — в зависимости от того, что является наиболее простым для поставленной задачи.
Обычно используется знакомая декартова система координат , а иногда и сферические полярные координаты , или цилиндрические координаты :

где t — параметр из-за их прямоугольной или круговой симметрии. Эти разные координаты и соответствующие базисные векторы представляют один и тот же вектор положения. более общие криволинейные координаты Вместо этого можно использовать , которые используются в таких контекстах, как механика сплошных сред и общая теория относительности (в последнем случае требуется дополнительная временная координата).
n измерений
[ редактировать ]Линейная алгебра позволяет абстрагировать n -мерный вектор положения. Вектор положения может быть выражен как линейная комбинация базисных векторов: [3] [4]

Набор сложение всех векторов положения образует пространство позиций ( векторное пространство , элементами которого являются векторы положения), поскольку позиции можно складывать ( векторов ) и масштабировать по длине ( скалярное умножение ) для получения другого вектора положения в пространстве. Понятие «пространство» интуитивно понятно, поскольку каждый x i ( i = 1, 2, …, n ) может иметь любое значение, совокупность значений определяет точку в пространстве.
Размерность ( позиционного пространства равна n также обозначается dim( R ) = n ). Координаты i вектора r относительно базисных e i равны x . векторов Вектор координат образует координатный вектор или n - кортеж ( x 1 , x 2 , …, x n ).
Каждая координата x i может быть параметризована рядом параметров t . Один параметр x i ( t ) будет описывать изогнутую одномерную траекторию, два параметра x i ( t 1 , t 2 ) описывают изогнутую двухмерную поверхность, три x i ( t 1 , t 2 , t 3 ) описывают изогнутый трехмерный объем пространство и так далее.
Линейная оболочка базового набора B = { e 1 , e 2 , …, e n } равна позиционному пространству R , обозначенному как span( B ) = R .
Приложения
[ редактировать ]Дифференциальная геометрия
[ редактировать ]Поля векторов положения используются для описания непрерывных и дифференцируемых пространственных кривых, и в этом случае независимым параметром не обязательно должно быть время, но может быть (например, длина дуги кривой).
Механика
[ редактировать ]В любом уравнении движения вектор положения r ( t ) обычно является наиболее востребованной величиной, поскольку эта функция определяет движение частицы (т.е. точечной массы ) – ее положение относительно заданной системы координат в некоторый момент времени t .
Чтобы определить движение с точки зрения положения, каждая координата может быть параметризована временем; поскольку каждое последующее значение времени соответствует последовательности последовательных пространственных положений, заданных координатами, пределом континуума многих последовательных положений является путь, по которому движется частица.
В случае одного измерения позиция имеет только один компонент, поэтому она эффективно вырождается в скалярную координату. Это может быть, скажем, вектор в направлении x или радиальном направлении r . Эквивалентные обозначения включают

Производные
[ редактировать ]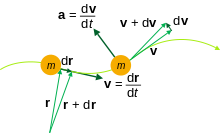
Для вектора положения r , который является функцией времени t , производные по времени могут быть вычислены относительно t . Эти производные имеют широкое применение при изучении кинематики , теории управления , техники и других наук.
- Скорость
- где d r — бесконечно малое смещение (вектор) .
- Ускорение
- Придурок



Эти названия первой, второй и третьей производных положения обычно используются в базовой кинематике. [5] В более широком смысле, производные более высокого порядка могут быть вычислены аналогичным образом. Исследование этих производных более высокого порядка может улучшить аппроксимацию исходной функции смещения. Такие члены более высокого порядка необходимы для точного представления функции смещения как суммы бесконечной последовательности , что позволяет использовать несколько аналитических методов в технике и физике.
См. также
[ редактировать ]- Аффинное пространство
- Система координат
- Горизонтальное положение
- Линейный элемент
- Параметрическая поверхность
- Фиксация позиции
- Шесть степеней свободы
- Вертикальное положение
Примечания
[ редактировать ]- ^ Термин «смещение» в основном используется в механике, а перевод — в геометрии.
- ^ Келлер, Ф.Дж., Геттис, МЫ и др. (1993), с. 28–29.
- ^ Райли, К.Ф.; Хобсон, член парламента; Бенс, SJ (2010). Математические методы в физике и технике . Издательство Кембриджского университета. ISBN 978-0-521-86153-3 .
- ^ Липшуц, С.; Липсон, М. (2009). Линейная алгебра . МакГроу Хилл. ISBN 978-0-07-154352-1 .
- ^ Стюарт, Джеймс (2001). «§2.8. Производная как функция». Исчисление (2-е изд.). Брукс/Коул. ISBN 0-534-37718-1 .
Ссылки
[ редактировать ]- Келлер, Ф.Дж., Геттис, В.Е. и др. (1993). «Физика: классическая и современная» 2-е изд. Издательство МакГроу Хилл.
Внешние ссылки
[ редактировать ] СМИ, связанные с положением (геометрией) , на Викискладе?
СМИ, связанные с положением (геометрией) , на Викискладе?
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
