Стыковка и прикидыш
Вы можете помочь расширить эту статью с помощью текста, переведенного из соответствующей статьи на китайском языке . (Июнь 2023 г.) Нажмите [Показать] для важных инструкций по переводу. |


Стыковочная и прибухание к космическим кораблям - это соединение двух космических транспортных средств . Это соединение может быть временным или частично постоянным , например, для модулей космической станции.
Док-дюймовая стыковка относится к присоединению двух отдельных свободных космических транспортных средств. [ 1 ] [ 2 ] [ 3 ] [ 4 ] Бертинг относится к операциям со спариванием, когда пассивный модуль/транспортное средство помещается в интерфейс спаривания другого космического автомобиля с помощью роботизированной руки . [ 1 ] [ 3 ] [ 4 ] Поскольку современный процесс неберингы требует большего труда экипажа и занимает много времени, операции с причалом не подходят для быстрой эвакуации экипажа в случае чрезвычайной ситуации. [ 5 ]
История
[ редактировать ]Стыковка
[ редактировать ]В этом разделе нужны дополнительные цитаты для проверки . ( Октябрь 2018 ) |

Возможность стыковки космического корабля зависит от пространственного свидания , способности двух космических кораблей найти друг друга и хранение станции на одной и той же орбите . Впервые это было разработано Соединенными Штатами для проекта Близнецов . Это было запланировано для экипажа Близнецов 6, чтобы встретиться с вручную под командованием Уолли Ширры , с целевым транспортным средством безвилена в Агене в октябре 1965 года, но автомобиль Агена взорвался во время запуска. На пересмотренной миссии Gemini 6A Ширра успешно совершил встречу в декабре 1965 года с экипаж Близнецы 7 , приближаясь к 0,3 метра (1 фут), но между двумя космическими кораблями Близнецов не было стыковки. Первая стыковка с Агеной была успешно выполнена под командованием Нила Армстронга на Близнецах 8 16 марта 1966 года. Ручные стыковки были выполнены на трех последующих миссиях Близнецов в 1966 году.
Программа «Аполлон» зависела от встречи лунной орбиты , чтобы достичь своей цели посадки людей на Луну. Сначала это требовало маневрирования транспозиции, стыковки и извлечения между космическим кораблем «Командный командование и модуль служебного обслуживания» (CSM) и космический корабль Lunar Module (LM), вскоре после того, как оба ремесла были отправлены с орбиты Земли на пути к луне. Затем после завершения миссии по лунной посадке, двум астронавтам в LM пришлось встретить и стыдиться с CSM на лунной орбите, чтобы вернуться на Землю. Космический корабль был разработан для того, чтобы позволить проникновению внутрии-вегетационной экипажа через туннель между носом командного модуля и крышей лунного модуля. Эти маневры были впервые продемонстрированы на орбите с низкой землей 7 марта 1969 года на Аполлоне 9 , затем на лунной орбите в мае 1969 года на Аполлоне 10 , затем в шести миссиях по лунным посадке, а также на Аполлоне 13, где LM использовался в качестве Спасите автомобиль вместо того, чтобы делать лунную посадку.
В отличие от Соединенных Штатов, в которых использовалась ручная стыковка на протяжении всего программ Apollo, Skylab и Space Shuttle , Советский Союз использовал автоматизированные стыковочные системы с самого начала своих попыток стыковки. Первая такая система, IGLA , была успешно протестирована 30 октября 1967 года, когда два бесконечных Soyuz испытательных транспортных средств Kosmos 186 и Kosmos 188 автоматически пришвырались на орбите. [ 6 ] [ 7 ] Это была первая успешная советская стыковка. Переходя к попыткам стыковки с экипажем, Советский Союз впервые достиг Рендеву Союза 3 с Unceleed Soyuz 2 Craft 25 октября 1968 года; Док -дневная стыковка была безуспешно предпринята. Первая стыковка экипажа была достигнута 16 января 1969 года между Союзом 4 и Союз 5 . [ 8 ] В этой ранней версии космического корабля Soyuz не было туннеля внутреннего перевода, но два космонавта выполнили трансфер с внеквартистским суставом от Soyuz 5 в Soyuz 4, приземлившись в другом космическом корабле, чем они запустили. [ 9 ]
В 1970 -х годах Советский Союз модернизировал космический корабль Soyuz, чтобы добавить внутреннюю трансферную туннель и использовал его для транспортировки Cosmonauts во время программы Salyut Space Station с первым успешным визитом космической станции, начиная с 7 июня 1971 года, когда Soyuz 11 пришвартовался к Salyut 1 . Соединенные Штаты последовали его примеру, уступив свой космический корабль «Аполлон» на космической станции Skylab в мае 1973 года. В июле 1975 года две страны сотрудничали в тестовом проекте «Аполлон-Союз» , стыкивая космический корабль «Аполлон» с союзом с использованием специально разработанного модуля док Различные системы стыковки и космические атмосферы.
Начиная с Salyut 6 в 1978 году, Советский Союз начал использовать невозмутимый грузовой космический корабль Progress Cargo, чтобы пополнить свои космические станции на орбите с низкой землей, значительно расширяя длину экипажа. Как невозмутимый космический корабль, прогресс взволнован и полностью пришвартовался космическими станциями. В 1986 году система стыковки IGLA была заменена обновленной системой KURS на космическом корабле Soyuz. Прогресс космический корабль получил такое же обновление несколько лет спустя. [ 6 ] : 7 Система KURS все еще используется для пристывания к российскому орбитальному сегменту Международной космической станции .
Приютный
[ редактировать ]
Бернинг космического корабля можно проследить, по крайней мере, до того, как приписывается полезные нагрузки в залив полезной нагрузки космического челнока. [ 10 ] Такие полезные нагрузки могут быть либо свободными космическими кораблями, захваченными для технического обслуживания/возврата, либо полезными нагрузками, временно подверженными пространственной среде в конце системы удаленного манипулятора . В эпоху космического челнока использовались несколько различных механизмов причала. Некоторые из них были функциями залива полезной нагрузки (например, сборка защелкивания полезной нагрузки), в то время как другие были оборудованием поддержки в воздухе (например, структура поддержки полетов, используемая для HST обслуживания ).
Аппаратное обеспечение
[ редактировать ]Андрогинья
[ редактировать ]Системы стыковки/причатки могут быть как андрогинными ( непреднамеренными ), либо неандрогиновыми ( гендерными ), что указывает на то, какие части системы могут вместе спариваться.
Ранние системы для соединения космических кораблей были неандрогинные стыковочные системы. Неандрогиновые дизайны являются формой гендерного спаривания [ 2 ] В тех случаях, когда каждый космический корабль, который должен быть присоединен, имеет уникальный дизайн (мужчина или женщина) и конкретная роль, которую нужно играть в процессе стыковки. Роли не могут быть изменены. Кроме того, два космического корабля одного и того же пола вообще не могут быть присоединены.
Андрогиновая стыковка (и позже андрогинового причала), напротив, имеет идентичный интерфейс на обоих космических кораблях. В андрогинном интерфейсе существует единственный дизайн, который может подключаться к дублированию себя. на уровне системы Это позволяет избыточность (изменение роли), а также спасение и сотрудничество между любыми двумя космическими кораблями. Он также обеспечивает более гибкий дизайн миссии и уменьшает уникальный анализ и обучение миссий. [ 2 ]
Список механизмов/систем
[ редактировать ]| Изображение | Имя | Метод | Внутренняя трансфер | Примечания | Тип |
|---|---|---|---|---|---|

|
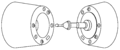
Механизм стыковки Близнецов | Стыковка | Нет | Позволил космическим кораблям Близнецам (активным) присматриваться к целевому транспортному средству Agena (пассивному). | Неандрогиновый |

|
Механизм стыковки Аполлона | Стыковка | Да | Разрешено модуль команды/сервиса (активный) присесть к лунному модулю Аполлона [ 11 ] (пассивный) и космическая станция Skylab (пассивная). Был использован для приставления к адаптеру модуля стыковки (пассивного) во время тестового проекта Аполлона-Союз (ASTP), который позволил экипажу приставать к космическому космическому пространству Советского Союза 7K-TM . Он имел круглый проход диаметром 810 мм (32 дюйма). [ 12 ] [ 13 ] | Неандрогиновый |
|
Первоначальная российская система стыков | Стыковка | Нет | Оригинальная система стыковки с зонтиком союза использовалась с космическим кораблем первого поколения Soyuz 7K-OK с 1966 по 1970 год, чтобы собрать инженерные данные в качестве подготовки к программе советской космической станции. Собранные данные впоследствии использовались для преобразования космического корабля Союз, который первоначально был разработан для советской экипажной лунной программы - в транспортное судно космической станции. [ 1 ]
Первая стыковка с двумя непредвиденными космическими кораблями Союза - первой полностью автоматизированной космической стыковкой в истории космического полета была сделана с миссиями Космоса 186 и Космосом 188 30 октября 1967 года. |
Неандрогиновый |

|
Свяжитесь с системой стыковки | Стыковка | Нет | Предназначен для использования в советской экипажной лунной программе , чтобы позволить Soyuz 7k-Lok («Лунно-орбитальное судно», активное), присматриваться к LK Lunar Lander (пассивному). [ 14 ] | Неандрогиновый |
 
|
SSVP-G4000 | Стыковка | Да | SSVP-G4000 также известен более смутно как российский зонд и дрог или просто российская система стыковки (RDS). [ 1 ] [ 15 ] In Russian, SSVP stands for Sistema Stykovki i Vnutrennego Perekhoda , literally "System for docking and internal transfer". [ 16 ]
Он использовался для первой стыковки на космическую станцию в истории космического полета, с миссиями Soyuz 10 и Soyuz 11 , которые пришвартились к советской космической станции Salyut 1 в 1971 году. [ 1 ] [ 15 ] Система стыковки была модернизирована в середине 1980-х годов, чтобы позволить стыковке 20 тонн модулей на космическую станцию MIR . [ 16 ] Он имеет круговой передаточный проход, который имеет диаметр 800 мм (31 дюйм) и изготовлен RKK Energiya. [ 3 ] [ 4 ] [ 16 ] Система зондирования и дрейга позволяет посещать космический корабль, используя интерфейс стыковки зонда, такой как союз , прогресс и космический корабль ESA ATV , чтобы прискочить к космическим станциям, которые предлагают порт с интерфейсом DROGE, такими как бывшие соли и miR mir или космическая станция. В общей сложности есть четыре такого док -порта, доступные на российском орбитальном сегменте МКС для посещения космического корабля; Они расположены на модулях Zvezda, Rassvet, PIRS и POISK. [ 16 ] Кроме того, система зондирования и дрейга использовалась на МКС, чтобы приставать к Рассвету , полученным к Заге. [ 1 ] |
Неандрогиновый |
 |
APAS-75 | Стыковка | Да | Используется на док-модуле Test Apollo-Soyuz Docking Module и Soyuz 7K-TM . Были различия в дизайне между американской и советской версией, но они все еще были механически совместимы. | Андрогин |
 
|
APAS-89 | Стыковка | Да | Использовался на меня ( Crystal , [ 14 ] [ 17 ] Mir Docking Module ), Soyuz TM-16 , [ 14 ] [ 17 ] Буран (был запланирован). [ 17 ] Он имел круговой передаточный проход диаметром 800 мм (31 дюйм). [ 1 ] [ 3 ] [ 4 ] | Андрогин (Soyuz TM-16), неандрогин (Kristall, [ 18 ] MIR стыковка модуля [ 19 ] ) |
 
|
APAS-95 | Стыковка | Да | Он использовался для стыков с космическим челноком для miR и ISS, [ 17 ] На МКС он также использовался в модуле Zarya, российском орбитальном сегменте для взаимодействия с PMA-1 на модуле Unity, US Orbital Segret [ 20 ] Он имеет диаметр 800 мм (31 дюйм). [ 1 ] [ 3 ] [ 4 ] Описано как «по существу то же самое, что и APAS-89. [ 17 ] | Androgynous (Shuttle, Zarya [ Цитация необходима ] и PMA-1 [ 1 ] ), Неандрогиновый (PMA-2 и PMA-3) [ 1 ] |
 
|
SSVP-M8000 ( гибридная стыковочная система ) | Стыковка | Да | SSVP-M8000 или более широко известный как «гибридный», представляет собой комбинацию механизма мягкого дока «зонда и дроги» с жестким док-воротником APAS-95. [ 16 ] Это начало производиться в 1996 году. [ 16 ] Он изготовлен RKK Energiya. [ 16 ]
Used on ISS (connects Zvezda to Zarya , Pirs , Poisk [ 1 ] Nauka [ 21 ] and Nauka to Prichal ) |
Неандрогиновый |
 
|
Обычный механизм причала | Приютный | Да | Используется на ISS ( USOS ), MPLMS , HTV , SpaceX Dragon 1 , [ 22 ] Cygnus . Стандартный CBM имеет проход в форме квадрата с округлыми краями и имеет ширину 1300 мм (50 дюймов). [ 4 ] Меньший люк, который использует Cygnus, приводит к передаче прохождения той же формы, но имеет ширину 940 мм (37 дюймов). [ 23 ] | Неандрогиновый |

|
Китайский механизм стыковки | Стыковка | Да | Используется космическим кораблем Шэньчжоу , начиная с Шэньчжоу 8, чтобы приставать к китайским космическим станциям. Китайский механизм стыковки основан на российской системе APAS-89/APAS-95; Некоторые назвали это «клоном». [ 1 ] У китайцев были противоречивые сообщения о его совместимости с APAS-89/95. [ 24 ] Он имеет круговой передаточный проход, который имеет диаметр 800 мм (31 дюйм). [ 25 ] [ 26 ] Андрогинозный вариант имеет массу 310 кг, а неандрогинный вариант имеет массу 200 кг. [ 27 ]
Впервые используется на космической станции Tiangong 1 и будет использоваться на будущих китайских космических станциях и с будущими транспортными средствами для ресурсов китайских грузов. |
Андрогин (Шэньчжоу) Неандрогиновый (Tiangong-1) |

|
Китайский механизм стыковки | Тип сбоя | Нет | Используется для , Китае в миссий по возвращению выборки Ascender передает образцы на орбитальный аппарат для возврата Земли, такие как Chang'e 5/6 когда . | Неандрогиновый |

|
Международный стандарт системы стыковки (IDSS) | Стыковка или причатка | Да | ISS Используется на международном док -адаптере , SpaceX Dragon 2 , Boeing Starliner и будущих транспортных средствах. Диаметр круговой передачи составляет 800 мм (31 дюйм). [ 28 ] Международный механизм стыковки и стыков (IBDM) - это реализация IDS, которые будут использоваться в космическом космическом пространстве Европейского космического агентства . [ 29 ] IBDM также будет использоваться на Dream Chaser . [ 30 ] | Активный, пассивный или андрогинный (т.е. оба). Активный ( коммерческий экипаж автомобиль , Orion); Пассивный ( IDA ) |

 |
ASA-G/ASP-G | Приютный | Да | Используется воздушным шлюзом Nauka Science (или Experiment) , к причалу в Наука . Механизм причала является уникальным гибридным производным. Система российского APAS-89/APAS-95, поскольку она имеет 4 лепестки вместо 3 вместе с 12 структурными крючками и является комбинацией активного механизма «зонд и дрог» на порту и Пассивная цель на воздухе. | Неандрогиновый |
| SSPA-GB 1/2 ( гибридная стыковочная система ) | Стыковка | Да | Это модифицированная пассивная гибридная версия SSVP-M8000.
Используется на ISS ( боковые порты Prichal для будущих дополнительных модулей) |
Неандрогиновый |
Адаптеры
[ редактировать ]Адаптер стыковки или причала является механическим или электромеханическим устройством, которое облегчает соединение одного типа стыковки или границ раздела к другому интерфейсу. В то время как такие интерфейсы могут теоретически быть стыковкой/стыковкой, стыковкой/причалом или причалом/причалом, на сегодняшний день только первые два типа были развернуты в пространстве. Ранее запустили и планируют быть запущенными адаптерами, перечислены ниже:
- Модуль стыковки ASTP: модуль воздушного шлюза, который преобразовал нас зонд и Droge в APAS-75 . Построен Rockwell International для миссии Apollo -Soyuz Test Mission 1975 года . [ 31 ]
- Адаптер под давлением (PMA) : преобразует активный общий механизм причала в APAS-95 . Три PMA прикреплены к МКС , PMA-1 и PMA-2 были запущены в 1998 году на STS-88 , PMA-3 в конце 2000 года на STS-92 . PMA-1 используется для подключения модуля управления Zarya с узел Unity 1, космических шаттлов, используемых PMA-2 и PMA-3 для стыковки.
- Международный стыковочный адаптер (IDA) : [ 32 ] Преобразует APAS-95 в международный стандарт системы стыковки. Планируется, что IDA-1 будет запущен на SpaceX CRS-7 до его отказа запуска, и прикрепился к форвардному PMA узла-2. [ 32 ] [ 33 ] IDA-2 была запущена на SpaceX CRS-9 и прикреплен к прямой PMA узла-2. [ 32 ] [ 33 ] IDA-3, замена для IDA-1, запущенная на SpaceX CRS-18 и прикреплена к Zenith Node-2 Zenith PMA. [ 34 ] Адаптер совместим с Международным стандартом системы стыковки (IDSS), который является попыткой многостороннего координационного совета МКС создать стандарт стыковки. [ 35 ]
- APAS в SSVP: преобразует пассивную гибридную систему стыковки в пассивный SSVP-G4000. [ 36 ] Кольцо стыковки изначально использовалось для Soyuz MS-18 и прогрессирования стыковки MS-17 на Nauka до тех пор, пока на ISS прибыл на ISS. [ 37 ] Этот адаптер называется SSPA-GM . Это было сделано для портов Наука Надир и Причала Надира Международной космической станции, где Союз и Прогресс -космический корабль должны были присматриваться к порту, обозначенному для модулей. Перед удалением SSPA-GM кольцо стыковки составляет 80 см (31 дюйм) в диаметре; Это становится 120 см (47 дюймов) после удаления.
-
 Модуль стыковки ASTP
Модуль стыковки ASTP -
 Адаптер под давлением
Адаптер под давлением -
 Международный стыковочный адаптер
Международный стыковочный адаптер -
 APAS для стыковки SSVP (SSVPA-GM)
APAS для стыковки SSVP (SSVPA-GM)




Стыковка безумного космического корабля
[ редактировать ]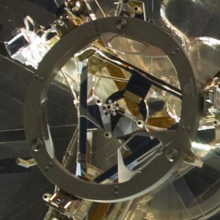
В течение первых пятидесяти лет космического полета основной целью большинства стыковских и причастотных миссий было переносить экипаж, построить или пополнять космическую станцию или проверить такую миссию (например, стыковка между Космосом 186 и Космосом 188 ). Следовательно, обычно был по крайней мере один из участвующих космических кораблей, был представлен в экипаже, с целью обиливаемого обзора (например, космическая станция или лунный посадочный) - исключения были несколько полностью безумных советских миссий (например, стыковки Космоса 1443 и и и Прогресс 23 к безвидному Salyut 7 или Progress M1-5 к безвидному miR ). Еще одним исключением стало несколько миссий американских космических шаттлов США , таких как Бертингс космического телескопа Хаббла (HST) во время пяти миссий HST обслуживания. Японская миссия ETS-VII (прозвище Hikoboshi и Orihime ) в 1997 году была разработана для тестирования безумного рандеву и стыковки, но выступила в качестве одного космического корабля, который разделялся, чтобы объединить вместе.
Изменения в экипажном аспекте начались в 2015 году, как было запланировано ряд экономически ориентированных коммерческих стыков безумных космических кораблей. В 2011 году два коммерческих поставщика космических кораблей [ который? ] Объявлены планы по предоставлению автономного / телеоперационного космического корабля без разобщенности для обслуживания другого невозмутимого космического корабля. Примечательно, что оба эти услуги обслуживания намеревались приставать к спутникам, которые не были предназначены для стыковки, ни для обслуживания в пространстве.
Ранняя бизнес-модель для этих услуг была в первую очередь на почти геосинхронной орбите, хотя Delta-V . орбитального маневрирования также предусмотрены крупные услуги [ 38 ]
Создание миссии Orbital Express 2007 года - миссии по правительству США по проверке спутникового обслуживания в пространстве с двумя транспортными средствами, разработанными с нуля для заправки и замены подсистемы в орбите-две компании объявили о планах коммерческих протекторов спутникового обслуживания, которые будут Требовать стыковки двух безвиленных транспортных средств.
- Space Infrastructure Servicing (SIS)-это космический корабль , который разрабатывался канадской аэрокосмической фирмой MacDonald, Dettwiler и Associates (MDA)-Maker of Canadarm -для работы в качестве небольшого депо-заправки в пространстве для спутников связи в геосинхронном орбите . Intelsat был партнером по требованиям и финансированию для первоначального демонстрационного спутника, предназначенного для запуска в 2015 году. [ 39 ] [ 40 ]
- Автомобиль расширения миссии (MEV) [ 41 ] был космическим кораблем, разрабатываемым в 2011 году американской фирмой Vivisat , совместным предприятием 50/50 аэрокосмических фирм США и ATK , для работы в качестве небольшого пространства, возмущающегося космического корабля . [ 38 ] MEV будет пристым, но не будет переносить топливо. Скорее он использовал бы « свои собственные двигатели для управления поставкой для цели». [ 38 ]
Автомобили SIS и MEV планировали использовать различную технику стыковки. Сестренка планировала использовать кольцевое крепление вокруг моторного мотора [ 42 ] В то время как транспортное средство для расширения миссии будет использовать несколько более стандартный подход INSERT-A-Probe-Ne-Nozle-of-Motor. [ 38 ]
Выдающимся космическим кораблем, который получил механизм непредвзятых стыков, является космический телескоп Хаббла (HST). В 2009 году миссия трансфера STS-125 добавила механизм мягкого захвата (SCM) в кормовой переборке космического телескопа. SCM предназначен для непрерывных стыков и будет использоваться в конце срока службы Хаббла, чтобы приставать к невозмутимому космическому кораблю с де-орбитальным Хабблом. Используемый SCM был разработан, чтобы быть совместимым с интерфейсом Docking System NASA (NDS), чтобы оставить возможность обслуживания. [ 43 ] SCM будет по сравнению с системой, используемой во время пяти HST -обслуживания, чтобы захватить и причал HST до космического шаттла, [ Цитация необходима ] Значительно уменьшить свидание и захватить сложности дизайна, связанные с такими миссиями. NDS имеет некоторое сходство с механизмом APAS-95, но не совместим с ним. [ 44 ]
Некооперативная стыковка
[ редактировать ]Стыковая стыковка с космическим кораблем (или другим человеком, созданным космическим объектом), который не имеет системы управления работой, иногда может быть желательной, либо для того, чтобы спасти его, либо инициировать контролируемую де-орбита . До сих пор были предложены некоторые теоретические методы стыковки с не-кооперативным космическим кораблем. [ 45 ] Тем не менее, за исключением миссии Soyuz T-13 по спасению искалеченной космической станции Salyut 7 , по состоянию на 2006 год [update]Все стыковки космического корабля в первые пятьдесят лет космического полет были достигнуты с транспортными средствами, где оба вовлеченных космических корабля находились под управлением управления автономным или телероботическим отношением . [ 45 ] В 2007 году, однако, была выполнена демонстрационная миссия, которая включала первоначальный тест захваченного некооперативного космического корабля, контролируемым космическим кораблем с использованием роботизированной руки. [ 46 ] Исследовательские и моделирующие работы продолжают поддерживать дополнительные автономные некомоперативные миссии захвата в ближайшие годы. [ 47 ] [ 48 ]
Salyut 7 space station salvage mission
[ редактировать ]

Salyut 7 , десятая космическая станция любого рода, и Soyuz T-13 были составлены в том, что автор Дэвид С.Ф. Порти описывает как «один из самых впечатляющих подвигов ремонта в пространстве в истории». [ 14 ] Солнечное отслеживание не удалось, и из -за ошибки телеметрии станция не сообщила о неспособности управления миссией во время автономного полета. После того, как на станции закончились заповедники с электрической энергией, она внезапно прекратила общение в феврале 1985 года. Планирование экипажа было прервано, чтобы позволить советскому военному командиру Владимиру Джанибекову [ 49 ] И техническая научная инженер -инженер Виктор Савихих [ 50 ] Чтобы сделать аварийный ремонт.
Все советские и российские космические станции были оснащены автоматическими системами свидания и стыковки, от первой космической станции Salyut 1 с использованием системы IGLA, до российского орбитального сегмента международной космической станции с использованием системы KURS . Экипаж Soyuz обнаружил, что станция не транслировала радар или телеметрию для свиданий, а после прибытия и внешней проверки на куминной станции экипаж оценил близость с использованием портативных лазерных дальности.
Джанибеков пилотировал свой корабль, чтобы перехватить передний порт Сальюут 7, соответствовал вращению станции и достиг мягкой док -станции с станцией. После достижения жесткого дока они подтвердили, что электрическая система станции была мертва. Перед открытием люка Джанибеков и Савихи пробовали условия атмосферы станции и нашли ее удовлетворительным. Одеждавшись зимней одеждой с мехом, они вошли в холодную станцию, чтобы провести ремонт. В течение недели достаточное количество систем было возвращено в Интернете, чтобы позволить робот -грузовым кораблям пристаивать на станции. Почти два месяца прошли до того, как атмосферные условия на космической станции были нормализованы. [ 14 ]
Бесплетренные стыковки некооперативных космических объектов
[ редактировать ]Примеры и перспектива в этой статье касаются в первую очередь с Соединенными Штатами и не представляют собой мировой взгляд на эту тему . ( Март 2016 г. ) |

Неокуперативные встречи и методы захвата были теоретизированы, и одна миссия была успешно выполнена с Unceleed Spacecraft на орбите. [ 46 ]
Типичный подход к решению этой проблемы включает в себя две фазы. Во -первых, изменения отношения и орбитала вносятся в космический корабль «преследовать» до тех пор, пока он не будет не иметь никакого относительного движения с «целью» космического корабля. Во -вторых, стыковочные маневры начинаются, которые похожи на традиционную стыковку кооперативных космических кораблей. Предполагается стандартизированный интерфейс стыковки на каждом космическом корабле. [ 51 ]
НАСА выявило автоматизированное и автономное свидание и стыковку-способность двух космических кораблей встречаться и док-станция, действующие независимо от контролеров человека и без другого резервного копирования, [и которые требуют технологий] достижений в датчиках, программном обеспечении и режиме режима и управление полетом , среди прочих проблем »-в качестве важнейшей технологии для« окончательного успеха таких возможностей, как хранение и заправки с участием в орбите », а также для сложных операций по сборке компонентов миссии для межпланетных направлений. [ 52 ]
Автоматизированный/автономный автомобиль Rendezvous & Docking (ARDV) представляет собой предлагаемую миссию по демонстрации технологий НАСА (FTD) для полета еще в 2014/2015. Важной целью НАСА по предлагаемой миссии является продвижение технологии и продемонстрировать автоматизированное свидание и стыковку. Одним из элементов миссии, определенного в анализе 2010 года, была разработка лазерного датчика операций с близостью, который можно было бы использовать для не-кооперативных транспортных средств на расстояниях между 1 метром (3 фута 3 дюйма) и 3 километра (2 мили). Некооперативные механизмы стыковки были определены как критические элементы миссии для успеха таких автономных миссий. [ 52 ]
Схватка и подключение к некооперативным космическим объектам были определены как главная техническая задача в дорожной карте НАСА НАСА 2010 года. [ 53 ]
Стыковочные состояния
[ редактировать ]Соединение стыковки/припитки называется «мягким» или «жестким». Как правило, космический корабль сначала инициирует мягкий док , устанавливая контакт и фиксируя его разъем стыковки целевым автомобилем. После того, как мягкое соединение закреплено, если оба космических корабля будут под давлением, они могут перейти к твердой доке , где механизмы стыковки образуют герметичное уплотнение, что позволяет безопасно открывать внутренние люки, чтобы экипаж и груз могли быть переданы.
Бернинг космический корабль и модули
[ редактировать ]Доквид и нерешительный описывает космический корабль с помощью стыковочного порта, без помощи и под их собственной властью. Бертинг происходит, когда космический корабль или модуль без питания не могут использовать стыковочный порт или требует помощи в использовании. Эта помощь может быть получена от космического корабля, например, когда космический шаттл использовал свою роботизированную руку, чтобы втянуть модули МКС в свои постоянные причалы. Аналогичным образом, модуль Poisk был постоянно пришлет до стыковочного порта после того, как он был подтолкнут к модифицированному космическому пространству прогресса , который затем был отброшен. Космический корабль Cygnus resupply, поступающий на МКС, не подключается к стыковочному порту , вместо этого он втягивается в механизм причала от роботизированной руки станции, а затем станция закрывает соединение. Механизм причала используется только в США сегменте МКС , российский сегмент МКС использует док -порты для постоянных причалов.
Марс поверхностной стыковка
[ редактировать ]
НАСА обсуждала стыковку в отношении экипажа Mars Rover , например, с Mars Habitat или Ascent Stage. [ 54 ] Марсианский поверхностный автомобиль (и поверхностные среды обитания) будет иметь большой прямоугольный док -люк, приблизительно 2 на 1 метр (6,6 на 3,3 фута). [ 54 ] [ неудачная проверка ]
Галерея
[ редактировать ]-
 Время отключения космического корабля Союз с международной космической станции
Время отключения космического корабля Союз с международной космической станции

Ссылки
[ редактировать ]- ^ Jump up to: а беременный в дюймовый и фон глин час я Дж k л Джон Кук; Валерея Аксаментов; Томас Хоффман; Уэс Брунер (1 января 2011 г.). «Механизмы интерфейса ISS и их наследие» (PDF) . Хьюстон, Техас: Боинг . Получено 31 марта 2015 года .
Док -дюймовая стыковка - это когда один входящий космический корабль с другим космическим кораблем и летит на контролируемой траектории столкновения таким образом, чтобы выравнивать и объединить механизмы границы раздела. Механизмы стыковки космического корабля, как правило, вводят так называемый мягкий захват, за которым следует фаза ослабления нагрузки, а затем твердое составное положение, которое устанавливает воздушную структурную связь между космическим кораблем. Бернинг, напротив, это когда входящий космический корабль захватывается роботизированным рычагом, а его механизм раздела находится в непосредственной близости от механизма стационарного раздела. Затем обычно существует процесс захвата, грубое выравнивание и тонкое выравнивание, а затем структурное прикрепление.
- ^ Jump up to: а беременный в «Международная стандартизация стыковки» (PDF) . НАСА. 17 марта 2009 г. с. 15 Получено 4 марта 2011 года .
Стыковка: объединение или объединение двух отдельных свободных пробелов.
- ^ Jump up to: а беременный в дюймовый и Fehse, Wigbert (2003). Автоматизированное свидание и стыковка космического корабля . Кембридж, Великобритания: издательство Кембриджского университета. ISBN 978-0521824927 .
- ^ Jump up to: а беременный в дюймовый и фон «Расширенная система стыковки/причатки - мастерская уплотнения НАСА» (PDF) . НАСА. 4 ноября 2004 г. с. 15. Архивировано из оригинала (PDF) 22 сентября 2011 года . Получено 4 марта 2011 года .
Бертинг относится к операциям со спариванием, когда неактивный модуль/транспортное средство помещается в интерфейс спаривания с использованием системы удаленного манипулятора System-RMS. Док -станция относится к операциям со спариванием, когда активное транспортное средство летит в интерфейс спаривания под его собственной силой.
- ^ Пит Хардинг (25 февраля 2015 г.). «EVA-30 завершает последнюю подготовку к коммерческому экипажу ISS» . Nasaspaceflight.com . Получено 9 апреля 2023 года .
- ^ Jump up to: а беременный «Мир аппаратное наследие, часть 1: Союз» (PDF) . НАСА. п. 10. Архивировано из оригинала (PDF) 26 декабря 2017 года . Получено 3 октября 2018 года .
- ^ «История» . Архивировано из оригинала 24 апреля 2008 года . Получено 23 июня 2010 года .
- ^ «Модель космического корабля Союз-4-5» . Маас Коллекция . Получено 22 октября 2021 года .
- ^ «NSSDCA - космический корабль - детали» . НАСА (на норвежском) . Получено 22 октября 2021 года .
- ^ «NSTS 21492 Программа Space Shuttle Program Power загрузка залив полезной нагрузки (Basic)» . (Космический центр Линдона Б. Джонсона, Хьюстон Техас, 2000)
- ^ История систем стыковки США (10/05/2010) Архивирована 24 мая 2011 г., на машине Wayback
- ^ "Apollo 9 Press Kit" (PDF) . НАСА. 23 февраля 1969 г. с. 43 Получено 17 марта 2015 года .
Туннель составляет 32 дюйма (0,81 см) в диаметре и используется для переноса экипажа между CSM и LM членами экипажа либо в подчеркиваемых, так и на беспрепятственных единицах мобильности на экстраверизации (EMU).
- ^ Харленд, Дэвид (2011). Аполлон 12 - На океане штормов: на океане штормов . Нью -Йорк: Спрингер. п. 138.
- ^ Jump up to: а беременный в дюймовый и Порти, Дэвид (март 1995 г.). «Мир аппаратное наследие» (PDF) . НАСА. Архивировано из оригинала (PDF) 7 сентября 2009 года . Получено 11 декабря 2011 года .
- ^ Jump up to: а беременный М.Сислагхи; C. Сантини (октябрь 2008 г.). «Российская стыковочная система и автоматизированный трансфер: безопасная интегрированная концепция» (PDF) . Эса Архивировано из оригинала (PDF) 3 февраля 2013 года . Получено 14 мая 2016 года .
- ^ Jump up to: а беременный в дюймовый и фон глин "Системы стыковки" . Russianspaceweb.com . Получено 2 сентября 2012 года .
- ^ Jump up to: а беременный в дюймовый и Барт Хендриккс; Берт Вис (2007). Энергия-Буран: советский космический челнок . Чичестер, Великобритания: Praxis Publishing Ltd. стр. 379–381. ISBN 978-0-387-69848-9 Полем
Для миссий космической станции Буран был бы несет модуль стыковки (SM) в передней части залива полезной нагрузки. Он состоял из сферической секции (диаметром 2,55 м), увенчанного цилиндрическим туннелем (диаметром 2,2 м) с андрогинным стыковочным портом APAS-89, модифицированной версией системы APAS-75, разработанной NPO Energiya для 1975 года Apollo- Проект тестирования Soyuz (стр. 141). План заключался в том, чтобы орбитальный аппарат был запущен без раздела и полета на космическую станцию Мир, где он будет пристаться к стыковочному порту осевой стыковки APAS-89 модуля Кристалла (стр. 246). В конце 1980-х годов NPO Energiya было приказано построить три космического корабля Soyuz (серийные номера 101, 102, 103) с док-портами APAS-89 (стр. 246). Soyuz Craft nr. 101 был в конечном итоге выпущен в качестве Soyuz TM-16 в январе 1993 года, в котором была еще одна экипаж-резидент (Gennadiy Manakov и Aleksandr Poleshchuk) на космическую станцию MIR. Оснащенный стыковочным портом APAS-89, это был единственный автомобиль Союз, когда-либо стыдившись с модулем Kristall. Soyuz "Rescue" автомобиль nr. 102 и 103, которые были только частично собраны, были модифицированы как обычные космические корабля Soyuz TM со стандартными механизмами стыковки зонда и были даны новые серийные номера (стр. 249). В июле 1992 года НАСА инициировало разработку системы стыковки орбиты (ODS) для поддержки рейсов шаттла в MIR. Установленная в прямом конце залива полезной нагрузки, ODS состоит из внешнего воздушного шлюза, вспомогательной фермы и порта APAS стыковки. В то время как первые два элемента были построены Rockwell, APA были изготовлены RKK Energiya. Хотя внутренним обозначением Energiya для трансфера APAS является APAS-95, он по сути такой же, как APAS-89 Буран. В то время как ODS был слегка изменен для трансляций трансфер на МКС, APAS оставалась неизменной (стр. 380).
- ^ «Модуль Кристалла (77KST)» . www.russianpaceweb.com .
- ^ «Космический шаттл миссия STS-74 Пресс-комплект» (PDF) . НАСА . Получено 28 декабря 2011 года .
Атлантида будет нести российский стыковочный модуль, который имеет мультиметральные андрогинные механизмы стыковки вверху и снизу
- ^ NASA.gov
- ^ Хардинг, Пит (29 июля 2021 г.). «MLM Nauka доки к ISS, вскоре после этого неисправности» . Nasaspaceflight . Получено 30 июля 2021 года .
- ^ Стивен Кларк (25 февраля 2015 г.). «Тесты новых систем Dragon для начала минут после запуска» . Космический полет сейчас . Получено 9 апреля 2023 года .
- ^ «Cygnus Tucduced Cargo Module завершает тестирование на давление» . Орбитальные науки. Август 2010. Архивировано с оригинала 17 апреля 2013 года . Получено 16 марта 2015 года .
Хэтч PCM имеет сильное сходство с текущими люками, используемыми в сегменте США ISS. Однако на 37 дюймах с каждой стороны он несколько меньше, чем 50 -дюймовый люк МКС.
- ^ «Первая космическая станция Китая для подъема» . Космические новости. 1 августа 2012 года. Архивировано с оригинала 17 сентября 2012 года . Получено 3 сентября 2012 года .
- ^ «Различия между Шэньчжоу-8 и Шэньчжоу-7» . Видеонаблюдение. 31 октября 2011 года. Архивировано с оригинала 28 марта 2016 года . Получено 17 марта 2015 года .
Там будет 800-миллиметровый цилиндрический проход, соединяющий Shenzhou-8 и Tiangong-1.
- ^ Кларк, Стивен (18 июня 2012 г.). «Китайские астронавты открывают дверь на орбитальной исследовательской лаборатории» . Космический полет сейчас . Получено 17 марта 2015 года .
Цзин прошел через узкий 31-дюймовый проход, ведущий в Тяньгонг 1
- ^ Huayon ; Qiu
- ^ Международная система стыковки (PDF) (Rev. C Ed.). 20 ноября 2013 года. Архивировано из оригинала (PDF) 16 декабря 2013 года.
- ^ «Статус человеческого исследования и операционной миссии (HEO)» (PDF) . НАСА. 29 июля 2013 года. Архивировано из оригинала (PDF) 5 августа 2021 года . Получено 19 марта 2014 года .
- ^ «Космос QinETIQ выигрывает контракт ESA на международный механизм стыковки с пирожом» . Космический реф бизнес . Архивировано из оригинала 6 сентября 2020 года . Получено 9 января 2015 года .
- ^ "Apollo Astp Docking Module" . Астронавт. Архивировано с оригинала 27 декабря 2016 года . Получено 7 апреля 2018 года .
- ^ Jump up to: а беременный в Хартман, Дэн (23 июля 2012 г.). «Статус программы международной космической станции» (PDF) . НАСА. Архивировано из оригинала (PDF) 7 апреля 2013 года . Получено 10 августа 2012 года .
- ^ Jump up to: а беременный Хартман, Даниэль (июль 2014 г.). «Статус ISS USOS» (PDF) . Консультативный совет НАСА ХЕОМД. Архивировано из оригинала (PDF) 18 февраля 2017 года . Получено 26 октября 2014 года .
- ^ Пьетробон, Стивен (20 августа 2018 г.). «Соединенные Штаты Коммерческий запуск ELV MANIFEST» . Получено 21 августа 2018 года .
- ^ Бэйт, Роб (26 июля 2011 г.). «Коммерческая программа экипажа: ключевые требования к вождению» . НАСА. Архивировано из оригинала (PowerPoint) 28 марта 2012 года . Получено 27 июля 2011 года .
- ^ "Новости. "Прогресс МС-17" освободил место для нового модуля" . www.roscosmos.ru . Retrieved November 27, 2021 .
- ^ "Новости. Новый модуль вошел в состав российского сегмента МКС" . www.roscosmos.ru . Retrieved November 27, 2021 .
- ^ Jump up to: а беременный в дюймовый
Морринг, Фрэнк -младший (22 марта 2011 г.). "Конец космического мусора?" Полем Авиационная неделя . Получено 21 марта 2011 года .
Vivisat, новое совместное предприятие 50-50 US Space и ATK, маркетинг космического корабля, возмущающего спутником, который соединяется с целевым космическим кораблем, используя тот же зонд-мотор, что и MDA, но не передает его топливо Полем Вместо этого транспортное средство становится новым топливным баком, используя свои собственные двигатели для поставки контроля отношения для цели. ... [Vivisat] Концепция не так далеко, как MDA. ... В дополнение к продлению срока службы спутника вне топлива, компания также может спасен, как AEHF-1, стыкивая его на низкой орбите, используя свой собственный мотор и топливо, чтобы поместить его справа. орбита, а затем перейти к другой цели.
- ^ «Intelsat выбирает Macdonald, Dettwiler and Associates Ltd. для службы спутников» . пресс-релиз . CNW Group. Архивировано из оригинала 12 мая 2011 года . Получено 15 марта 2011 года .
MDA планировала запустить свой автомобиль Space Infrastructure Servicing («SIS») на почти геосинхронную орбиту, где он будет обслуживать коммерческие и государственные спутники, нуждающиеся в дополнительном топливе, повторном положении или другом обслуживании. Первая заправочная миссия должна была быть доступна через 3,5 года после начала фазы сборки. ... Услуги, предоставляемые MDA для Intelsat в соответствии с настоящим Соглашением, оцениваются более чем 280 миллионов долларов США.
- ^
Де Селдинг, Питер Б. (14 марта 2011 г.). «Intelsat подписывает службу заправки спутников» . Космические новости . Архивировано из оригинала 24 мая 2012 года . Получено 15 марта 2011 года .
Если космический корабль MDA будет выполнен в соответствии с планированием, Intelsat заплатит MDA в общей сложности около 200 миллионов долларов. Это предполагало, что четыре или пять спутников будут даны около 200 килограммов каждый из топлива.
- ^ "Vivisat Corporate Opeview" . Веб -сайт компании . Вивисат. Архивировано с оригинала 24 января 2018 года . Получено 28 марта 2011 года .
- ^
Де Селдинг, Питер Б. (18 марта 2011 г.). «Intelsat подписывается на службу заправки спутников MDA» . Космические новости . Архивировано из оригинала 21 марта 2012 года . Получено 20 марта 2011 года .
Более 40 различных типов систем топлива ... SIS будет нести достаточно инструментов, чтобы открыть 75 процентов систем топлива на спутниках в настоящее время на геостационарной орбите. ... MDA запустит SIS Servicer, который будет встречаться с спутником Intelsat, прикрепляясь к кольцу вокруг мотора с апоги-боем спутника. С наземными командами, регулирующими движения, роботизированная рука SIS простирается через сопло мотора Apogee, чтобы найти и открутить топливную крышку спутника. Автомобиль SIS откроет топливную крышку после доставки согласованной суммы топлива, а затем отправится к своей следующей миссии. ... Ключом к бизнес -модели является способность MDA запустить замену топливных канистров, которые были бы захвачены SIS и используются для заправки десятков спутников в течение нескольких лет. Эти канистры были бы намного легче, чем автомобиль SIS, и, следовательно, намного дешевле в запуске.
- ^ НАСА (2008). «Мягкая захват и система свидания» . НАСА. Архивировано из оригинала 11 сентября 2008 года . Получено 22 мая 2009 г.
- ^ Парма, Джордж (20 мая 2011 г.). «Обзор системы стыковки НАСА и международной системы стыковки» (PDF) . НАСА. Архивировано из оригинала (PDF) 15 октября 2011 года . Получено 11 апреля 2012 года .
- ^ Jump up to: а беременный Ма, Чжанхуа; MA, OU & Shashikanth, Banavara (октябрь 2006 г.). «Оптимальный контроль над космическим кораблем, чтобы встретиться с падающим спутником в близком расстоянии» (PDF) . 2006 IEEE/RSJ Международная конференция по интеллектуальным роботам и системам . С. 4109–4114. doi : 10.1109/iros.2006.281877 . ISBN 1-4244-0258-1 Полем S2CID 12165186 . Архивировано из оригинала (PDF) 5 июня 2013 года . Получено 9 августа 2011 года .
Одна из самых сложных задач для обслуживания спутников на орбите-это встретить и захватить некооперативный спутник, такой как падающий спутник.
- ^ Jump up to: а беременный Кларк, Стивен (4 июля 2007 г.). «В космосе спутниковые испытания обслуги к концу подходят» . Космический полет сейчас . Получено 20 марта 2014 года .
- ^ Сюй, Венфу (сентябрь 2010 г.). «Автономное свидание и роботизированное захват некооперативной цели в космосе» . Роботика . 28 (5): 705–718. doi : 10.1017/s0263574709990397 . S2CID 43527059 . Получено 16 ноября 2014 года .
- ^ Йошида, Казуя (2004). «Динамика, контроль и сопоставление импеданса для роботизированного захвата некооперативного спутника». Продвинутая робототехника . 18 (2): 175–198. doi : 10.1163/156855504322758015 . S2CID 33288798 .
- ^ "Джанибеков" . Astronautix.com. Архивировано с оригинала 11 декабря 2016 года . Получено 5 августа 2013 года .
- ^ "Савихи" . Astronautix.com. Архивировано с оригинала 11 декабря 2016 года . Получено 5 августа 2013 года .
- ^
«Оптимальный контроль над свинцом и стыковкой с помощью некооперативного спутника» (PDF) . Университет штата Нью -Мексико. Архивировано из оригинала (PDF) 5 июня 2013 года . Получено 9 июля 2011 года .
Большинство текущих исследований и всех прошлых миссий направлены на то, чтобы захватить только очень кооперативные спутники. В будущем нам также может потребоваться захватить некооперативные спутники, такие как те, которые падают в космосе или не предназначенные для захвата.
- ^ Jump up to: а беременный Тули, Крейг (25 мая 2010 г.). «Новое космическое предприятие исследования» (PDF) . НАСА . Получено 25 июня 2012 года .
- ^ Амброуз, Роб (ноябрь 2010 г.). «Дорожная карта робототехники, телевизора и автономных систем» (PRACK) » (PDF) . НАСА . Получено 25 июня 2012 года .
Также необходима небольшая общая система стыковки для роботизированного космического корабля, чтобы позволить роботизированному космическому пространству AR & D в захват этих систем. Сборка крупных транспортных средств и этапов, используемых для разведывательных миссий Leo Beyond Leo, потребуют новых механизмов с новыми конвертами захвата за пределами любой стыковочной системы, используемой в настоящее время или в разработке. Разработка и тестирование автономного роботизированного захвата не-кооперативных целевых транспортных средств, в которых цель не обладает СПИДом, такими как приспособления для схватки или механизмы стыковки, необходимо для поддержки службы/спасения спутников.
- ^ Jump up to: а беременный « Концепция космического разведки 2010» (PDF) . Архивировано из оригинала (PDF) 25 сентября 2020 года . Получено 17 августа 2018 года .

