Лидар



Лидар ( / ˈ l aɪ d ɑːr / , также LIDAR , LiDAR или LADAR , аббревиатура от «обнаружение света и дальность» [ 1 ] или «лазерная визуализация, обнаружение и определение дальности» [ 2 ] ) — это метод определения дальности путем нацеливания на объект или поверхность лазером и измерения времени, в течение которого отраженный свет возвращается в приемник. Лидар может работать в фиксированном направлении (например, вертикальном) или может сканировать в нескольких направлениях, и в этом случае он известен как лидарное сканирование или 3D-лазерное сканирование , особая комбинация 3-D сканирования и лазерного сканирования . [ 3 ] Лидар имеет наземные, воздушные и мобильные приложения. [ 4 ] [ 5 ]
Лидар обычно используется для создания карт высокого разрешения с приложениями в геодезии , геодезии , геоматике , археологии , географии , геологии , геоморфологии , сейсмологии , лесном хозяйстве , физике атмосферы , [ 6 ] лазерное наведение , воздушное лазерное картографирование (ALSM) и лазерная альтиметрия . Он используется для создания цифровых трехмерных изображений областей на поверхности Земли и дна океана в приливной и прибрежной зонах путем изменения длины волны света. Он также все чаще используется для управления и навигации автономных автомобилей. [ 7 ] и за вертолет Ingenuity, совершивший рекордные полеты над поверхностью Марса . [ 8 ]
Эволюция квантовых технологий привела к появлению Quantum LiDAR, демонстрирующего более высокую эффективность и чувствительность по сравнению с обычными системами LiDAR. [ 9 ]
История и этимология
[ редактировать ]Под руководством Малкольма Стича компания Hughes Aircraft Company представила первую систему, подобную лидару, в 1961 году. [ 10 ] [ 11 ] вскоре после изобретения лазера. Эта система, предназначенная для спутникового слежения, сочетала в себе лазерно-фокусированную визуализацию с возможностью расчета расстояний путем измерения времени возвращения сигнала с помощью соответствующих датчиков и электроники сбора данных. Первоначально он назывался «Колидар», что означает «обнаружение когерентного света и определение дальности». [ 12 ] происходит от термина « радар », который сам по себе является аббревиатурой от «радиообнаружения и измерения дальности». Все [ нужна ссылка ] лазерные дальномеры , лазерные высотомеры и лидары произошли от ранних колидарных систем.
Первым практическим наземным применением колидарной системы стал «Colidar Mark II», большой лазерный дальномер, похожий на винтовку, выпущенный в 1963 году, который имел дальность действия 11 км и точность 4,5 м и использовался для военного наведения. [ 13 ] [ 11 ] Первое упоминание лидара как отдельного слова в 1963 году позволяет предположить, что оно возникло как сочетание слов « свет » и «радар»: «В конечном итоге лазер может стать чрезвычайно чувствительным детектором определенных длин волн от удаленных объектов. используется для изучения Луны с помощью «лидара» (светового радара)…» [ 14 ] [ 15 ] Название « фотонный радар » иногда используется для обозначения определения дальности видимого спектра, такого как лидар. [ 16 ] [ 17 ]
Первые применения лидара были в метеорологии, где Национальный центр атмосферных исследований использовал его для измерения облаков и загрязнения. [ 18 ] Широкая общественность узнала о точности и полезности лидарных систем в 1971 году во время миссии «Аполлон-15» , когда астронавты использовали лазерный высотомер для составления карты поверхности Луны. Хотя в английском языке слово «радар» больше не рассматривается как аббревиатура (т. е. пишется без заглавной буквы), в некоторых публикациях, начиная с 1980-х годов, слово «лидар» писалось с заглавной буквы как «ЛИДАР» или «ЛиДАР». Единого мнения по поводу капитализации не существует. В различных публикациях лидар именуется «ЛИДАР», «ЛиДАР», «ЛИДаР» или «Лидар». использует Геологическая служба США и «ЛИДАР», и «лидар», иногда в одном документе; [ 19 ] New York Times преимущественно использует «лидар» для статей, написанных сотрудниками, [ 20 ] хотя новостные ленты, такие как Reuters, могут использовать лидар. [ 21 ]
Общее описание
[ редактировать ]Лидар использует ультрафиолетовый , видимый или ближний инфракрасный свет для изображения объектов. Он может воздействовать на широкий спектр материалов, включая неметаллические объекты, камни, дождь, химические соединения, аэрозоли , облака и даже отдельные молекулы . [ 6 ] Узкий лазерный луч может отображать физические особенности с очень высоким разрешением ; например, самолет может отображать местность с разрешением 30 сантиметров (12 дюймов) или выше. [ 22 ]

Основная концепция лидара была предложена Э. Х. Синджем в 1930 году, который предполагал использование мощных прожекторов для исследования атмосферы. [ 23 ] [ 24 ] Действительно, с тех пор лидар широко используется для исследования атмосферы и метеорологии . Лидарные инструменты, установленные на самолетах и спутниках, выполняют съемку и картографирование – недавним примером является экспериментальный передовой лидар для авиационных исследований Геологической службы США. [ 25 ] НАСА определило лидар как ключевую технологию, обеспечивающую автономную и точную безопасную посадку будущих роботизированных и пилотируемых лунных посадочных аппаратов. [ 26 ]
Длины волн варьируются в зависимости от цели: примерно от 10 микрометров ( инфракрасный ) до примерно 250 нанометров ( ультрафиолетовый ). Обычно свет отражается посредством обратного рассеяния , в отличие от чистого отражения, которое можно наблюдать в зеркале. Для разных приложений лидара используются разные типы рассеяния: чаще всего Рэлеевское рассеяние , рассеяние Ми , комбинационное рассеяние и флуоресценция . [ 6 ] Подходящие комбинации длин волн могут позволить удаленно картографировать состав атмосферы путем выявления зависящих от длины волны изменений интенсивности возвращенного сигнала. [ 27 ] Название «фотонный радар» иногда используется для обозначения определения дальности видимого спектра, например, лидара. [ 16 ] [ 17 ] хотя фотонный радар в более строгом смысле относится к определению радиочастотного диапазона с использованием компонентов фотоники .
Технология
[ редактировать ]Математическая формула
[ редактировать ]Лидар определяет расстояние до объекта или поверхности по формуле : [ 28 ]

где c — скорость света , d — расстояние между детектором и обнаруживаемым объектом или поверхностью, а t — время, затраченное лазерным светом на то, чтобы добраться до обнаруживаемого объекта или поверхности, а затем вернуться обратно к детектору.
Дизайн
[ редактировать ]Этот раздел нуждается в дополнительных цитатах для проверки . ( Апрель 2017 г. ) |
Двумя типами схем лидарного обнаружения являются «некогерентное» или прямое обнаружение энергии (которое в основном измеряет изменения амплитуды отраженного света) и когерентное обнаружение (лучше всего подходит для измерения доплеровских сдвигов или изменений фазы отраженного света). Когерентные системы обычно используют оптическое гетеродинное детектирование . [ 29 ] Это более чувствительно, чем прямое обнаружение, и позволяет им работать с гораздо меньшей мощностью, но требует более сложных приемопередатчиков.
Оба типа используют импульсные модели: микроимпульсные или высокоэнергетические . Микроимпульсные системы используют прерывистые всплески энергии. Они возникли в результате постоянно растущей мощности компьютеров в сочетании с достижениями в области лазерных технологий. Они потребляют значительно меньше энергии в лазере, обычно порядка одного микроджоуля , и часто «безопасны для глаз», то есть их можно использовать без мер предосторожности. Системы большой мощности распространены в исследованиях атмосферы, где они широко используются для измерения параметров атмосферы: высоты, слоистости и плотности облаков, свойств облачных частиц ( коэффициент ослабления , коэффициент обратного рассеяния, деполяризация ), температуры, давления, ветра, влажности, и концентрация малых газов (озон, метан, закись азота и т. д.). [ 6 ]
Компоненты
[ редактировать ]Лидарные системы состоят из нескольких основных компонентов.
Лазер
[ редактировать ]с длиной волны 600–1000 нм Лазеры наиболее распространены для ненаучных приложений. Максимальная мощность лазера ограничена или используется система автоматического отключения, которая отключает лазер на определенных высотах, чтобы сделать его безопасным для глаз людей на земле.
Одна из распространенных альтернатив — лазеры с длиной волны 1550 нм — безопасны для глаз при относительно высоких уровнях мощности, поскольку эта длина волны не сильно поглощается глазом. Однако компромисс заключается в том, что нынешняя технология детекторов менее совершенна, поэтому эти длины волн обычно используются на больших расстояниях с меньшей точностью. Они также используются в военных целях, поскольку длина волны 1550 нм не видна в очках ночного видения , в отличие от более короткого инфракрасного лазера с длиной волны 1000 нм.
-лазеры с диодной накачкой с длиной волны 1064 нм В бортовых лидарах для топографического картографирования обычно используются YAG , в то время как в батиметрических системах (исследования подводных глубин) обычно используются YAG-лазеры с удвоенной частотой 532 нм с диодной накачкой, поскольку длина волны 532 нм проникает в воду с гораздо меньшим затуханием , чем 1064 нм. Настройки лазера включают частоту повторения лазера (которая контролирует скорость сбора данных). Длина импульса обычно зависит от длины резонатора лазера, количества проходов, необходимых через материал усиления (YAG, YLF и т. д.), и скорости переключения добротности (импульсов). Лучшее разрешение цели достигается при использовании более коротких импульсов при условии, что детекторы и электроника лидарного приемника имеют достаточную полосу пропускания. [ 6 ]
Фазированные решетки
[ редактировать ]может Фазированная решетка освещать любое направление, используя микроскопическую решетку отдельных антенн. Управление синхронизацией (фазой) каждой антенны направляет связный сигнал в определенном направлении.
Фазированные решетки используются в радарах с 1940-х годов. Чтобы увидеть диаграмму направленности определенного размера в определенном направлении, используется порядка миллиона оптических антенн. Для достижения этого фаза каждой отдельной антенны (излучателя) точно контролируется. Очень сложно, если вообще возможно, использовать ту же технику в лидаре. Основные проблемы заключаются в том, что все отдельные излучатели должны быть когерентными (технически исходящими от одного и того же «главного» генератора или лазерного источника), иметь размеры, равные длине волны излучаемого света (диапазон 1 микрон), чтобы действовать как точечный источник с их фазами. контролируется с высокой точностью.
Несколько компаний работают над разработкой коммерческих твердотельных лидаров, но в этих устройствах используется другой принцип, описанный ниже во флэш-лидаре.
Микроэлектромеханические машины
[ редактировать ]Микроэлектромеханические зеркала (МЭМС) не являются полностью твердотельными. Однако их миниатюрный форм-фактор обеспечивает многие из тех же преимуществ по стоимости. Одиночный лазер направляется на одно зеркало, которое можно переориентировать для просмотра любой части целевого поля. Зеркало вращается с большой скоростью. Однако системы MEMS обычно работают в одной плоскости (слева направо). Чтобы добавить второе измерение, обычно требуется второе зеркало, которое перемещается вверх и вниз. Альтернативно, другой лазер может поразить то же зеркало под другим углом. Системы МЭМС могут выйти из строя из-за ударов/вибрации и могут потребовать повторной калибровки. [ 30 ]
Сканер и оптика
[ редактировать ]На скорость проявления изображений влияет скорость их сканирования. Варианты сканирования по азимуту и углу места включают двойные колеблющиеся плоские зеркала, комбинацию с многоугольным зеркалом и двухосный сканер . Выбор оптики влияет на угловое разрешение и дальность обнаружения. дырочное зеркало или светоделитель Для сбора отраженного сигнала можно использовать .
Электроника фотодетектора и приемника
[ редактировать ]две основные технологии фотодетекторов В лидаре используются : твердотельные фотодетекторы, такие как кремниевые лавинные фотодиоды или фотоумножители . Чувствительность приемника — еще один параметр, который необходимо сбалансировать в конструкции лидара.
Системы позиционирования и навигации
[ редактировать ]Лидарные датчики, установленные на мобильных платформах, таких как самолеты или спутники, требуют приборов для определения абсолютного положения и ориентации датчика. Такие устройства обычно включают в себя приемник глобальной системы позиционирования и блок инерциальных измерений (IMU).
Датчик
[ редактировать ]Лидар использует активные датчики, которые обеспечивают собственный источник освещения. Источник энергии сталкивается с объектами, а отраженная энергия обнаруживается и измеряется датчиками. Расстояние до объекта определяется путем регистрации времени между переданными и обратными импульсами и использования скорости света для расчета пройденного расстояния. [ 31 ] Лидар со вспышкой позволяет создавать трехмерные изображения благодаря способности камеры излучать вспышку большего размера и определять пространственные отношения и размеры интересующей области с помощью возвращаемой энергии. Это обеспечивает более точную визуализацию, поскольку снятые кадры не нужно сшивать вместе, а система не чувствительна к движению платформы. Это приводит к меньшим искажениям. [ 32 ]
Трехмерное изображение может быть получено с использованием как сканирующих, так и несканирующих систем. «Лазерный радар с трехмерным обзором» представляет собой систему лазерной локации без сканирования, в которой применяется импульсный лазер и камера с быстрым стробированием. Начались исследования виртуального управления лучом с использованием технологии цифровой обработки света (DLP).
Лидарное изображение также может быть выполнено с использованием матриц высокоскоростных детекторов и матриц детекторов, чувствительных к модуляции, обычно построенных на одиночных чипах с использованием дополнительных технологий изготовления металл-оксид-полупроводник (КМОП) и гибридных КМОП/ устройств с зарядовой связью (ПЗС). В этих устройствах каждый пиксель выполняет некоторую локальную обработку, такую как демодуляция или стробирование, на высокой скорости, преобразуя сигналы с понижением частоты в видеоскорость, чтобы массив можно было считывать как камеру. Используя этот метод, можно одновременно получить многие тысячи пикселей/каналов. [ 33 ] В 3-D лидарных камерах высокого разрешения используется гомодинное обнаружение с помощью электронного затвора CCD или CMOS . [ 34 ]
Лидар когерентной визуализации использует гетеродинное обнаружение с синтетической решеткой , чтобы позволить одноэлементному приемнику действовать так, как если бы он был матрицей изображений. [ 35 ]
В 2014 году лаборатория Линкольна анонсировала новый чип обработки изображений с более чем 16 384 пикселями, каждый из которых способен отображать один фотон, что позволяет захватывать большую область в одном изображении. Более раннее поколение технологии с вчетверо меньшим количеством пикселей было использовано военными США после землетрясения на Гаити в январе 2010 года. Один пролет бизнес-джета на высоте 3000 м (10 000 футов) над Порт-о-Пренсом позволил сделать мгновенные снимки городских площадей площадью 600 м (2 000 футов) с разрешением 30 см (1 фут), отображающие точная высота обломков, разбросанных по улицам города. [ 36 ] Новая система в десять раз лучше и может быстрее создавать карты гораздо большего размера. В чипе используется арсенид индия-галлия (InGaAs), который работает в инфракрасном спектре на относительно длинной волне, что обеспечивает более высокую мощность и большую дальность действия. Во многих приложениях, таких как беспилотные автомобили, новая система снизит затраты, поскольку для наведения чипа не требуется механический компонент. InGaAs использует менее опасные длины волн, чем обычные кремниевые детекторы, которые работают на видимых длинах волн. [ 37 ] Новые технологии для инфракрасного подсчета одиночных фотонов LIDAR быстро развиваются, включая матрицы и камеры на различных полупроводниковых и сверхпроводниковых платформах. [ 38 ]
Флеш-лидар
[ редактировать ]Во флэш-лидаре все поле зрения освещается широким расходящимся лазерным лучом за один импульс. В этом отличие от обычного сканирующего лидара, в котором используется коллимированный лазерный луч , освещающий одну точку за раз, а луч сканируется растровым способом для освещения поля зрения точка за точкой. Этот метод освещения также требует другой схемы обнаружения. И в сканирующем, и в флэш-лидаре времяпролетная камера используется для сбора информации как о трехмерном местоположении, так и об интенсивности падающего на нее света в каждом кадре. Однако при сканирующем лидаре эта камера содержит только точечный датчик, тогда как при флэш-лидаре камера содержит либо 1-D, либо 2-D матрицу датчиков , каждый пиксель которой собирает трехмерную информацию о местоположении и интенсивности. В обоих случаях информация о глубине собирается с использованием времени прохождения лазерного импульса (т. е. времени, которое требуется каждому лазерному импульсу для попадания в цель и возврата к датчику), что требует импульсного воздействия лазера и сбора данных с помощью камеру для синхронизации. [ 39 ] В результате появилась камера, которая снимает на расстоянии, а не в цвете. [ 30 ] Флэш-лидар особенно выгоден по сравнению со сканирующим лидаром, когда камера, сцена или и то, и другое движутся, поскольку вся сцена освещается одновременно. При использовании сканирующего лидара движение может вызвать «дрожание» из-за промежутка времени, когда лазер растрирует сцену.
Как и во всех формах лидара, встроенный источник освещения делает флэш-лидар активным датчиком. Возвращаемый сигнал обрабатывается встроенными алгоритмами для почти мгновенного трехмерного рендеринга объектов и особенностей местности в поле зрения датчика. [ 40 ] Частота повторения лазерных импульсов достаточна для создания 3D-видео с высоким разрешением и точностью. [ 39 ] [ 41 ] Высокая частота кадров датчика делает его полезным инструментом для различных приложений, в которых используется визуализация в реальном времени, например, для высокоточных операций удаленной посадки. [ 42 ] Немедленно возвращая трехмерную сетку высот целевых ландшафтов, датчик вспышки можно использовать для определения оптимальных зон приземления в сценариях посадки автономного космического корабля. [ 43 ]
Чтобы увидеть на расстоянии, необходима мощная вспышка света. Мощность ограничена уровнями, которые не повреждают сетчатку глаза человека. Длины волн не должны влиять на глаза человека. Однако недорогие кремниевые имидж-сканеры не считывают свет в безопасном для глаз спектре. Вместо этого из арсенида галлия , что может увеличить затраты до 200 000 долларов. потребуются сканеры [ 30 ] Арсенид галлия — это то же самое соединение, которое используется для производства дорогостоящих и высокоэффективных солнечных панелей, обычно используемых в космосе.
Классификация
[ редактировать ]По ориентации
[ редактировать ]Лидар может быть ориентирован по надиру , зениту или по горизонтали. Например, лидарные высотомеры смотрят вниз, атмосферные лидары смотрят вверх, а системы предотвращения столкновений на основе лидаров смотрят сбоку.
На основе механизма сканирования
[ редактировать ]Лазерными проекциями лидаров можно манипулировать с помощью различных методов и механизмов для создания эффекта сканирования: стандартного шпиндельного типа, который вращается, обеспечивая обзор на 360 градусов; твердотельный лидар, который имеет фиксированное поле зрения, но не имеет движущихся частей и может использовать МЭМС или оптические фазированные решетки для управления лучами; и лидар со вспышкой, который рассеивает вспышку света по большому полю зрения, прежде чем сигнал возвращается обратно к детектору. [ 44 ]
На основе платформы
[ редактировать ]Приложения лидара можно разделить на воздушные и наземные. [ 45 ] Для этих двух типов требуются сканеры с различными характеристиками в зависимости от цели сбора данных, размера области захвата, желаемого диапазона измерений, стоимости оборудования и многого другого. Возможны также космические платформы, см. спутниковую лазерную альтиметрию .
Воздушно-десантный
[ редактировать ]Воздушный лидар (также бортовое лазерное сканирование ) — это когда лазерный сканер, прикрепленный к самолету во время полета, создает трехмерную модель ландшафта из облака точек. На данный момент это наиболее подробный и точный метод создания цифровых моделей рельефа , заменяющий фотограмметрию . Одним из основных преимуществ по сравнению с фотограмметрией является возможность фильтровать отражения от растительности из модели облака точек для создания цифровой модели местности , которая представляет поверхности земли, такие как реки, тропы, объекты культурного наследия и т. д., которые скрыты деревьями. В категории бортовых лидаров иногда проводят различие между приложениями на больших и малых высотах, но основное различие заключается в снижении как точности, так и плотности точек данных, полученных на больших высотах. Воздушный лидар также можно использовать для создания батиметрических моделей на мелководье. [ 46 ]
Основными компонентами воздушного лидара являются цифровые модели рельефа (DEM) и цифровые модели поверхности (DSM). Точки и наземные точки представляют собой векторы дискретных точек, тогда как DEM и DSM представляют собой интерполированные растровые сетки дискретных точек. Этот процесс также включает в себя получение цифровых аэрофотоснимков. Для интерпретации глубинных оползней, например, под покровом растительности, уступов, трещин растяжения или опрокинутых деревьев используется воздушный лидар. Цифровые модели рельефа с помощью воздушного лидара позволяют видеть сквозь полог лесного покрова, выполнять детальные измерения уступов, эрозии и наклона электрических столбов. [ 47 ]
Данные воздушного лидара обрабатываются с использованием набора инструментов под названием Toolbox for Lidar Data Filtering and Forest Studies (TIFFS). [ 48 ] для фильтрации лидарных данных и программного обеспечения для изучения местности. Данные интерполируются в цифровые модели местности с помощью программного обеспечения. Лазер направляется на область, которую необходимо нанести на карту, и высота каждой точки над землей рассчитывается путем вычитания исходной координаты z из соответствующей высоты цифровой модели местности. На основе этой высоты над землей получаются данные, не относящиеся к растительности, которые могут включать такие объекты, как здания, линии электропередач, летающие птицы, насекомые и т. д. Остальные точки рассматриваются как растительность и используются для моделирования и картографирования. В рамках каждого из этих графиков метрики лидара рассчитываются путем расчета таких статистических данных, как среднее значение, стандартное отклонение, асимметрия, процентили, среднее квадратичное и т. д. [ 48 ]

множество коммерческих лидарных систем для беспилотных летательных аппаратов В настоящее время на рынке представлено . Эти платформы могут систематически сканировать большие территории или служить более дешевой альтернативой пилотируемым самолетам для небольших операций сканирования. [ 49 ]
Воздушная лидарная батиметрия
[ редактировать ]технологический комплекс бортового лидара Батиметрический предполагает измерение времени прохождения сигнала от источника до его возврата на датчик. Методика сбора данных включает в себя компонент картирования морского дна и компонент наземных данных, который включает в себя видеоразрезы и отбор проб. Он работает с использованием лазерного луча зеленого спектра (532 нм). [ 50 ] Два луча проецируются на быстро вращающееся зеркало, которое создает массив точек. Один из лучей проникает в воду, а также при благоприятных условиях обнаруживает придонную поверхность воды.
Глубина воды, измеряемая лидаром, зависит от прозрачности воды и поглощения используемой длины волны. Вода наиболее прозрачна для зеленого и синего света, поэтому в чистой воде они проникают глубже всего. [ 51 ] Сине-зеленый свет с длиной волны 532 нм, создаваемый твердотельным ИК-лазером с удвоенной частотой, является стандартом для воздушной батиметрии. Этот свет может проникать через воду, но сила импульса экспоненциально затухает с расстоянием, пройденным через воду. [ 50 ] Лидар может измерять глубину от 0,9 до 40 м (от 3 до 131 фута) с точностью по вертикали порядка 15 см (6 дюймов). Отражение от поверхности затрудняет разрешение воды на глубине менее 0,9 м (3 фута), а поглощение ограничивает максимальную глубину. Мутность вызывает рассеяние и играет важную роль в определении максимальной глубины, которую можно разрешить в большинстве ситуаций, а растворенные пигменты могут увеличивать поглощение в зависимости от длины волны. [ 51 ] Другие отчеты показывают, что проникновение воды обычно в два-три раза превышает глубину Секки. Батиметрический лидар наиболее полезен при картографировании побережья в диапазоне глубин 0–10 м (0–33 фута). [ 50 ]
В среднем в достаточно прозрачной прибрежной морской воде лидар может проникать примерно на глубину около 7 м (23 фута), а в мутной воде — примерно на 3 м (10 футов). Среднее значение, полученное Сапутрой и др. в 2021 году, заключается в том, что зеленый лазерный свет проникает в воду примерно в полтора-два раза глубже глубины Секки в водах Индонезии. Температура и соленость воды влияют на показатель преломления, что мало влияет на расчет глубины. [ 52 ]
Полученные данные показывают полную протяженность поверхности суши, выступающей над морским дном. Этот метод чрезвычайно полезен, поскольку он будет играть важную роль в основной программе картографирования морского дна. Картирование дает топографию суши, а также подводные возвышенности. Получение изображений отражения морского дна — еще одно решение этой системы, которое может помочь в картировании подводной среды обитания. Этот метод использовался для картирования трехмерных изображений вод Калифорнии с использованием гидрографического лидара. [ 53 ]
Полноволновой лидар
[ редактировать ]Бортовые лидарные системы традиционно могли регистрировать лишь несколько пиковых значений отраженного сигнала, в то время как более поздние системы регистрируют и оцифровывают весь отраженный сигнал. [ 54 ] Ученые проанализировали форму сигнала для извлечения пиковой доходности с помощью разложения по Гауссу . [ 55 ] Чжуан и др., 2017 использовали этот подход для оценки надземной биомассы. [ 56 ] Обработка огромных объемов полноволновых данных затруднена. Таким образом, разложение сигналов по Гауссу эффективно, поскольку оно уменьшает объем данных и поддерживается существующими рабочими процессами, которые поддерживают интерпретацию трехмерных облаков точек . Недавние исследования изучали вокселизацию . Интенсивность образцов сигналов вставляется в вокселизированное пространство (3-D изображение в оттенках серого), создавая трехмерное представление сканируемой области. [ 54 ] Соответствующие метрики и информация затем могут быть извлечены из этого вокселизированного пространства. Структурную информацию можно извлечь с использованием трехмерных показателей локальных территорий, и существует тематическое исследование, в котором использовался подход вокселизации для обнаружения мертвых стоящих эвкалиптовых деревьев в Австралии. [ 57 ]
Земной
[ редактировать ]Наземные применения лидара (также наземного лазерного сканирования ) происходят на поверхности Земли и могут быть стационарными или мобильными. Стационарное наземное сканирование наиболее распространено в качестве метода исследования, например, в традиционной топографии, мониторинге, документации культурного наследия и криминалистике. [ 45 ] Трехмерные облака точек, полученные с помощью сканеров этих типов, можно сопоставить с цифровыми изображениями сканируемой области, снятыми с места расположения сканера, для создания реалистично выглядящих трехмерных моделей за относительно короткое время по сравнению с другими технологиями. Каждой точке в облаке точек присваивается цвет пикселя изображения, снятого в том же месте и направлении, что и лазерный луч, создавший точку.
Мобильный лидар (также мобильное лазерное сканирование ) — это когда два или более сканера прикрепляются к движущемуся транспортному средству для сбора данных по маршруту. Эти сканеры почти всегда работают в паре с другим оборудованием, включая приемники GNSS и IMU . Одним из примеров применения является съемка улиц, где необходимо учитывать линии электропередач, точную высоту мостов, окаймляющие деревья и т. д. Вместо того, чтобы собирать каждое из этих измерений по отдельности с помощью тахиметра , можно создать трехмерную модель из облака точек, в которой можно выполнить все необходимые измерения, в зависимости от качества собранных данных. Это устраняет проблему забывания провести измерение, если модель доступна, надежна и имеет соответствующий уровень точности.
Наземное лидарное картографирование включает в себя процесс создания сетки сетки занятости . Этот процесс включает в себя массив ячеек, разделенных на сетки, в которых используется процесс сохранения значений высоты, когда лидарные данные попадают в соответствующую ячейку сетки. Затем создается двоичная карта путем применения определенного порога к значениям ячеек для дальнейшей обработки. Следующим шагом является обработка радиального расстояния и координат z от каждого сканирования, чтобы определить, какие трехмерные точки соответствуют каждой указанной ячейке сетки, что приводит к процессу формирования данных. [ 58 ]
Приложения
[ редактировать ]
Помимо приложений, перечисленных ниже, существует множество приложений для лидаров, которые часто упоминаются в национальных программах набора лидарных данных. Эти приложения во многом определяются дальностью эффективного обнаружения объектов; разрешение, которое показывает, насколько точно лидар идентифицирует и классифицирует объекты; и путаница из-за отражения, означающая, насколько хорошо лидар может видеть что-либо в присутствии ярких объектов, таких как отражающие знаки или яркое солнце. [ 44 ]
Компании работают над снижением стоимости лидарных датчиков, которая в настоящее время составляет от 1200 до более чем 12 000 долларов США. Более низкие цены сделают лидар более привлекательным для новых рынков. [ 59 ]
Сельское хозяйство
[ редактировать ]
Сельскохозяйственные роботы используются для самых разных целей: от разбрасывания семян и удобрений, сенсорных методов до разведки посевов для борьбы с сорняками .
Лидар может помочь определить, где вносить дорогостоящие удобрения. Он может создать топографическую карту полей и выявить склоны и солнечное освещение сельскохозяйственных угодий. Исследователи из Службы сельскохозяйственных исследований использовали эти топографические данные с результатами урожайности сельскохозяйственных угодий за предыдущие годы, чтобы разделить земли на зоны высокой, средней и низкой урожайности. [ 60 ] Это указывает на то, где вносить удобрения, чтобы максимизировать урожайность.
Лидар теперь используется для наблюдения за насекомыми в полевых условиях. Использование лидара позволяет обнаруживать движение и поведение отдельных летающих насекомых с идентификацией вплоть до пола и вида. [ 61 ] В 2017 году была опубликована заявка на патент на эту технологию в США, Европе и Китае. [ 62 ]
Другое применение — картирование посевов в садах и виноградниках для обнаружения роста листвы и необходимости обрезки или другого ухода, обнаружения изменений в урожайности фруктов или подсчета растений.
Лидар полезен в ситуациях, где отсутствует GNSS , например, в ореховых и фруктовых садах, где листва создает помехи для сельскохозяйственного оборудования, которое в противном случае использовало бы точную фиксацию GNSS. Лидарные датчики могут обнаруживать и отслеживать относительное положение рядов, растений и других маркеров, чтобы сельскохозяйственное оборудование могло продолжать работать до тех пор, пока не будет восстановлено положение GNSS.
Классификация видов растений
[ редактировать ]Борьба с сорняками требует определения видов растений. Это можно сделать с помощью 3D-лидара и машинного обучения. [ 63 ] Лидар создает контуры растений в виде «облака точек» со значениями дальности и отражательной способности. Эти данные преобразуются, и из них извлекаются признаки. Если вид известен, признаки добавляются как новые данные. Вид маркируется, и его характеристики изначально сохраняются в качестве примера для идентификации вида в реальной среде. Этот метод эффективен, поскольку использует лидар низкого разрешения и контролируемое обучение. Он включает в себя простой в расчете набор функций с общими статистическими характеристиками, которые не зависят от размера предприятия. [ 63 ]
Археология
[ редактировать ]Лидар имеет множество применений в археологии, включая планирование полевых кампаний, картографирование объектов под пологом леса и обзор широких непрерывных объектов, неотличимых от земли. [ 64 ] Лидар может быстро и дешево создавать наборы данных высокого разрешения. Продукты, полученные с помощью лидара, можно легко интегрировать в географическую информационную систему (ГИС) для анализа и интерпретации.
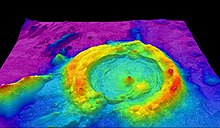
Лидар также может помочь в создании цифровых моделей рельефа (ЦМР) высокого разрешения археологических памятников, которые могут выявить микротопографию, которая в противном случае скрыта растительностью. Интенсивность возвращенного лидарного сигнала можно использовать для обнаружения объектов, скрытых под плоскими поверхностями с растительностью, такими как поля, особенно при картировании с использованием инфракрасного спектра. Наличие этих особенностей влияет на рост растений и, следовательно, на количество отраженного инфракрасного света. [ 65 ] Например, в Форте Босежур – Национальном историческом памятнике Форт Камберленд, Канада, с помощью лидара были обнаружены археологические объекты, связанные с осадой форта в 1755 году. Детали, которые нельзя было различить на земле или с помощью аэрофотосъемки, были идентифицированы путем наложения оттенков холмов. ЦМР создана с искусственным освещением под разными углами. Другой пример — работа в Караколе Арлена Чейза и его жены Дайаны Зайно Чейз . [ 66 ] В 2012 году лидар использовался для поиска легендарного города Ла-Сьюдад-Бланка или «Города обезьяньего бога» в регионе Ла-Москития в джунглях Гондураса. В течение семидневного периода картирования были обнаружены свидетельства существования искусственных сооружений. [ 67 ] [ 68 ] о повторном открытии города Махендрапарвата . В июне 2013 года было объявлено [ 69 ] На юге Новой Англии лидар использовался для обнаружения каменных стен, фундаментов зданий, заброшенных дорог и других особенностей ландшафта, скрытых на аэрофотоснимках густым лесным пологом региона. [ 70 ] [ 71 ] [ 72 ] В Камбодже данные лидара использовались Дамианом Эвансом и Роландом Флетчером, чтобы выявить антропогенные изменения ландшафта Ангкора. [ 73 ]
В 2012 году лидар показал, что в поселении Пурепеча в Ангамуко в Мичоакане , Мексика, было примерно столько же зданий, сколько сегодня на Манхэттене; [ 74 ] в то время как в 2016 году его использование при картировании древних дорог майя на севере Гватемалы выявило 17 эстакад, связывающих древний город Эль-Мирадор с другими объектами. [ 75 ] [ 76 ] В 2018 году археологи с помощью лидара обнаружили более 60 000 искусственных сооружений в биосферном заповеднике майя , что стало «крупным прорывом», который показал, что цивилизация майя была намного крупнее, чем считалось ранее. [ 77 ] [ 78 ] [ 79 ] [ 80 ] [ 81 ] [ 82 ] [ 83 ] [ 84 ] [ 85 ] [ 86 ] [ 87 ] В 2024 году археологи с помощью лидара обнаружили стоянки долины Упано . [ 88 ] [ 89 ]
Автономные транспортные средства
[ редактировать ]

Автономные транспортные средства могут использовать лидар для обнаружения и обхода препятствий, чтобы безопасно перемещаться по окружающей среде. [ 7 ] [ 90 ] Внедрение лидара стало решающим событием, которое стало ключевым моментом в создании Stanley , первого автономного транспортного средства, успешно выполнившего Grand Challenge DARPA . [ 91 ] Выходные данные облака точек от лидарного датчика предоставляют необходимые данные для программного обеспечения робота, чтобы определить, где в окружающей среде существуют потенциальные препятствия и где находится робот по отношению к этим потенциальным препятствиям. Сингапурский альянс исследований и технологий Сингапур-MIT (SMART) активно разрабатывает технологии для автономных лидарных транспортных средств. [ 92 ]
Самые первые поколения автомобильных адаптивных круиз-контролей использовали только лидарные датчики.
Обнаружение объектов для транспортных систем
[ редактировать ]В транспортных системах для обеспечения безопасности транспортных средств и пассажиров, а также для разработки электронных систем помощи водителю крайне важно понимать транспортное средство и окружающую его среду. Лидарные системы играют важную роль в безопасности транспортных систем. Многие электронные системы, которые повышают помощь водителю и безопасность автомобиля, такие как адаптивный круиз-контроль (ACC), система экстренного торможения и антиблокировочная система тормозов (ABS), зависят от определения окружающей среды автомобиля и действуют автономно или полуавтономно. Это достигается с помощью лидарного картирования и оценки.
Обзор основ: современные лидарные системы используют вращающиеся шестиугольные зеркала, которые разделяют лазерный луч. Три верхних луча используются для обнаружения транспортных средств и препятствий впереди, а нижние лучи используются для обнаружения разметки полосы движения и особенностей дороги. [ 93 ] Основным преимуществом использования лидара является то, что получается пространственная структура, и эти данные могут быть объединены с другими датчиками, такими как радар и т. д., чтобы получить лучшее представление об окружающей среде транспортного средства с точки зрения статических и динамических свойств объектов, присутствующих в пространстве. среда. И наоборот, серьезной проблемой лидара является сложность восстановления данных облака точек в плохих погодных условиях. Например, во время сильного дождя световые импульсы, излучаемые лидарной системой, частично отражаются от капель дождя, что добавляет к данным шум, называемый «эхо». [ 94 ]
Ниже упомянуты различные подходы к обработке лидарных данных и их использованию вместе с данными от других датчиков посредством объединения датчиков для определения условий окружающей среды транспортного средства.
Обнаружение препятствий и распознавание дорожной обстановки с помощью лидара
[ редактировать ]Этот метод предложен Kun Zhou et al. [ 95 ] Он не только фокусируется на обнаружении и отслеживании объектов, но также распознает разметку полосы движения и особенности дороги. Как упоминалось ранее, в лидарных системах используются вращающиеся шестиугольные зеркала, которые разделяют лазерный луч на шесть лучей. Три верхних уровня используются для обнаружения движущихся впереди объектов, таких как транспортные средства и придорожные объекты. Датчик изготовлен из атмосферостойкого материала. Данные, обнаруженные лидаром, группируются в несколько сегментов и отслеживаются фильтром Калмана . Кластеризация данных здесь осуществляется на основе характеристик каждого сегмента на основе объектной модели, которые различают различные объекты, такие как транспортные средства, вывески и т. д. Эти характеристики включают размеры объекта и т. д. Отражатели на задних краях транспортных средств используются для отличать транспортные средства от других объектов. Слежение за объектами осуществляется с помощью двухступенчатого фильтра Калмана с учетом стабильности слежения и ускоренного движения объектов. [ 93 ] Данные лидарной интенсивности отражения также используются для обнаружения бордюров за счет использования надежной регрессии для борьбы с окклюзиями. Дорожная разметка распознается модифицированным методом Оцу путем распознавания шероховатых и блестящих поверхностей. [ 96 ]
- Преимущества
Придорожные отражатели, обозначающие границу полосы движения, иногда по разным причинам скрыты. Поэтому для распознавания границы дороги необходима другая информация. Лидар, используемый в этом методе, может измерять отражательную способность объекта. Следовательно, с помощью этих данных также можно распознать границу дороги. Также использование датчика с устойчивой к атмосферным воздействиям головкой помогает обнаруживать объекты даже в плохих погодных условиях. Модель высоты навеса до и после наводнения является хорошим примером. Лидар может обнаруживать очень подробные данные о высоте навеса, а также границу дороги.
Лидарные измерения помогают определить пространственную структуру препятствия. Это помогает различать объекты по размеру и оценивать последствия наезда на них. [ 97 ]
Лидарные системы обеспечивают лучшую дальность и большое поле зрения, что помогает обнаруживать препятствия на поворотах. Это одно из его основных преимуществ перед системами RADAR , которые имеют более узкое поле зрения. Сочетание лидарных измерений с различными датчиками делает систему надежной и полезной в приложениях реального времени, поскольку системы, зависящие от лидара, не могут оценить динамическую информацию об обнаруженном объекте. [ 97 ]
Было показано, что лидаром можно манипулировать, например, заставить беспилотные автомобили уклоняться. [ 98 ]
Экология и охрана
[ редактировать ]
Лидар также нашел множество применений для картирования природных и управляемых ландшафтов, таких как леса, водно-болотные угодья, [ 99 ] и луга. кроны Высоту , измерения биомассы и площадь листьев можно изучить с помощью бортовых лидарных систем. [ 100 ] [ 101 ] [ 102 ] [ 103 ] Аналогичным образом, лидар также используется во многих отраслях, в том числе в энергетике и железных дорогах, а также в Министерстве транспорта как более быстрый способ съемки. Топографические карты также можно легко создавать с помощью лидара, в том числе для развлекательного использования, например, при создании карт для ориентирования . [ 104 ] Лидар также применялся для оценки биоразнообразия растений, грибов и животных. [ 105 ] [ 106 ] [ 107 ] Используя южные бычьи водоросли в Новой Зеландии, данные прибрежного лидарного картирования были сопоставлены с геномными данными популяции , чтобы сформировать гипотезы относительно возникновения и времени доисторических землетрясений. [ 108 ]
Лесное хозяйство
[ редактировать ]
Лидарные системы также применяются для улучшения управления лесным хозяйством. [ 110 ] Измерения используются для инвентаризации лесных участков, а также расчета высоты отдельных деревьев, ширины и диаметра кроны. В другом статистическом анализе данные лидара используются для оценки общей информации о участке, такой как объем растительного покрова, средняя, минимальная и максимальная высота, растительный покров, биомасса и плотность углерода. [ 109 ] Воздушный лидар использовался для картирования лесных пожаров в Австралии в начале 2020 года. Данные обрабатывались для просмотра голой земли и выявления здоровой и сгоревшей растительности. [ 111 ]
Геология и почвоведение
[ редактировать ]высокого разрешения Цифровые карты рельефа , созданные с помощью бортовых и стационарных лидаров, привели к значительному прогрессу в геоморфологии (отрасли геонаук, изучающей происхождение и эволюцию топографии поверхности Земли). Возможности лидара обнаруживать тонкие топографические особенности, такие как речные террасы и берега речных каналов, [ 112 ] ледниковые формы рельефа, [ 113 ] для измерения высоты поверхности земли под растительным покровом, для лучшего определения пространственных производных высоты, для обнаружения камнепадов, [ 114 ] [ 115 ] для обнаружения перепадов высот между повторными съемками [ 116 ] позволили провести множество новых исследований физических и химических процессов, формирующих ландшафты. [ 117 ] В 2005 году Тур Ронд в массиве Монблан стал первой высокогорной горой , на которой был использован лидар для наблюдения за участившимися сильными камнепадами на больших скалах, предположительно вызванными изменением климата и деградацией вечной мерзлоты на большой высоте. [ 118 ]
Лидар также используется в структурной геологии и геофизике как комбинация воздушного лидара и ГНСС для обнаружения и изучения разломов , а также для измерения поднятия . [ 119 ] Результаты этих двух технологий могут создавать чрезвычайно точные модели рельефа местности — модели, которые могут даже измерять высоту земли через деревья. Эта комбинация наиболее широко использовалась для определения местоположения Сиэтлского разлома в Вашингтоне , США. [ 120 ] Эта комбинация также измеряет подъем на горе Сент-Хеленс , используя данные до и после подъема 2004 года. [ 121 ] Воздушные лидарные системы контролируют ледники и способны обнаруживать незначительные темпы их роста или уменьшения. Для этой цели спутниковая система NASA ICESat включает в себя лидарную подсистему. Воздушный топографический картограф НАСА [ 122 ] также широко используется для мониторинга ледников и анализа изменений прибрежной зоны. Эту комбинацию также используют почвоведы при обследовании почвы . Детальное моделирование местности позволяет почвоведам видеть изменения склонов и изменения рельефа, которые указывают на закономерности в пространственных отношениях почвы.
Атмосфера
[ редактировать ]
Первоначально на основе рубиновых лазеров был создан лидар для метеорологических применений вскоре после изобретения лазера и представляет собой одно из первых применений лазерной технологии. С тех пор возможности лидарной технологии значительно расширились, и лидарные системы используются для выполнения ряда измерений, включая профилирование облаков, измерение ветра, изучение аэрозолей и количественную оценку различных компонентов атмосферы. Компоненты атмосферы, в свою очередь, могут предоставить полезную информацию, включая приземное давление (путем измерения поглощения кислорода или азота ), выбросы парниковых газов ( диоксид углерода и метан ), фотосинтез (диоксид углерода), пожары ( окись углерода ) и влажность ( водяной пар ). . Атмосферные лидары могут быть наземными, воздушными или спутниковыми в зависимости от типа измерений.
атмосферы лидаром Дистанционное зондирование работает двумя способами:
- путем измерения обратного рассеяния от атмосферы и
- путем измерения рассеянного отражения от земли (когда лидар находится в воздухе) или другой твердой поверхности.
Обратное рассеяние из атмосферы непосредственно дает измерение облаков и аэрозолей. Другие производные измерения обратного рассеяния, такие как ветер или кристаллы перистого льда, требуют тщательного выбора длины волны и/или обнаруженной поляризации. Доплеровский лидар и доплеровский лидар Рэлея используются для измерения температуры и скорости ветра вдоль луча путем измерения частоты обратно рассеянного света. Доплеровское уширение движущихся газов позволяет определять свойства по результирующему сдвигу частоты. [ 123 ] Сканирующие лидары, такие как HARLIE с коническим сканированием НАСА , использовались для измерения скорости атмосферного ветра. [ 124 ] ЕКА Ветровая миссия ADM-Aeolus будет оснащена доплеровской лидарной системой для обеспечения глобальных измерений вертикальных профилей ветра. [ 125 ] Доплеровская лидарная система использовалась на летних Олимпийских играх 2008 года для измерения полей ветра во время соревнований на яхтах. [ 126 ]
Доплеровские лидарные системы в настоящее время также начинают успешно применяться в секторе возобновляемых источников энергии для сбора данных о скорости ветра, турбулентности, отклонении ветра и сдвиге ветра. Используются как импульсные, так и непрерывные системы. Импульсные системы используют синхронизацию сигнала для получения разрешения по вертикальному расстоянию, тогда как системы непрерывного действия полагаются на фокусировку детектора.
Термин «эолика » был предложен для описания совместного и междисциплинарного изучения ветра с использованием вычислительного моделирования гидромеханики и доплеровских лидарных измерений. [ 127 ]
Отражение от земли воздушного лидара дает меру отражательной способности поверхности (при условии, что коэффициент пропускания атмосферы хорошо известен) на длине волны лидара, однако отражение от земли обычно используется для измерения поглощения атмосферы. В измерениях «лидара дифференциального поглощения» (DIAL) используются две или более близко расположенные (менее 1 нм) длины волн для учета отражательной способности поверхности, а также других потерь передачи, поскольку эти факторы относительно нечувствительны к длине волны. При настройке на соответствующие линии поглощения конкретного газа измерения DIAL можно использовать для определения концентрации (коэффициента смешивания) этого конкретного газа в атмосфере. Это называется подходом интегрированного дифференциального поглощения на пути (IPDA), поскольку он является мерой интегрированного поглощения по всему пути лидара. Лидары IPDA могут быть как импульсными, так и импульсными. [ 128 ] [ 129 ] или CW [ 130 ] и обычно используют две или более длины волны. [ 131 ] Лидары IPDA использовались для дистанционного зондирования углекислого газа. [ 128 ] [ 129 ] [ 130 ] и метан. [ 132 ]
с синтетической решеткой Лидар позволяет получать лидарные изображения без необходимости использования детектора с решеткой. Его можно использовать для визуализации доплеровской скорости, визуализации со сверхбыстрой частотой кадров (миллионы кадров в секунду), а также для уменьшения спеклов в когерентном лидаре. [ 35 ] Обширную библиографию лидаров для атмосферных и гидросферных применений предоставил Грант. [ 133 ]
Правоохранительные органы
[ редактировать ]Лидарные датчики скорости используются полицией для измерения скорости транспортных средств в целях обеспечения соблюдения ограничения скорости . [ 134 ] Кроме того, он используется в криминалистике для помощи в расследовании места преступления. Сканирование места происшествия делается для записи точных деталей размещения объектов, крови и другой важной информации для последующего просмотра. Эти сканирования также можно использовать для определения траектории пули в случае стрельбы. [ 135 ]
Военный
[ редактировать ]Известно, что лишь немногие военные применения существуют и засекречены (например, измерение скорости малозаметной ядерной крылатой ракеты AGM-129 ACM с помощью лидара ), но ведется значительный объем исследований по их использованию для построения изображений. Системы более высокого разрешения собирают достаточно деталей, чтобы идентифицировать цели, например танки . Примеры военного применения лидара включают бортовую лазерную систему обнаружения мин (ALMDS) для борьбы с минами компании Areté Associates. [ 136 ]
В отчете НАТО (RTO-TR-SET-098) оценивались потенциальные технологии, позволяющие осуществлять дистанционное обнаружение и распознавание боевых биологических агентов. Оценивались потенциальные технологии: длинноволновое инфракрасное излучение (LWIR), дифференциальное рассеяние (DISC) и флуоресценция, индуцированная ультрафиолетовым лазером (UV-LIF). В отчете делается вывод, что: Основываясь на результатах испытаний лидарных систем и обсужденных выше, Целевая группа рекомендует, что лучшим вариантом для краткосрочного (2008–2010 гг.) применения автономных систем обнаружения является UV-LIF . [ 137 ] однако в долгосрочной перспективе другие методы, такие как спектроскопия комбинационного рассеяния света, могут оказаться полезными для идентификации боевых биологических агентов.
Компактный спектрометрический лидар ближнего действия, основанный на лазерно-индуцированной флуоресценции (LIF), позволит устранить наличие биологических угроз в аэрозольной форме на важных закрытых, полузакрытых и открытых объектах, таких как стадионы, метро и аэропорты. Эта возможность, работающая почти в режиме реального времени, позволит быстро обнаружить выброс биоаэрозолей и позволит своевременно принять меры по защите находящихся в помещении людей и минимизировать степень загрязнения. [ 138 ]
Система обнаружения биологического оружия дальнего действия (LR-BSDS) была разработана для армии США для обеспечения как можно более раннего предупреждения о биологической атаке. Это бортовая система, устанавливаемая на вертолете, для обнаружения синтетических аэрозольных облаков, содержащих биологические и химические агенты, на большом расстоянии. LR-BSDS с дальностью обнаружения 30 км и более была принята на вооружение в июне 1997 года. [ 139 ] Пять лидаров, произведенных немецкой компанией Sick AG, использовались для обнаружения на близком расстоянии на Stanley , автономном автомобиле , выигравшем в 2005 году конкурс DARPA Grand Challenge .
Роботизированный Boeing AH-6 в июне 2010 года совершил полностью автономный полет, в том числе обогнав препятствия с помощью лидара. [ 140 ] [ 141 ]
Горное дело
[ редактировать ]Для расчета объемов руды осуществляется периодическое (ежемесячное) сканирование участков выноса руды с последующим сравнением поверхностных данных с предыдущим сканированием. [ 142 ]
Лидарные датчики также могут использоваться для обнаружения и обхода препятствий в роботизированных горнодобывающих машинах, например, в автономной системе транспортировки Komatsu (AHS). [ 143 ] используется в «Шахте будущего» компании Rio Tinto.
Физика и астрономия
[ редактировать ]Всемирная сеть обсерваторий использует лидары для измерения расстояния до отражателей, расположенных на Луне , что позволяет измерять положение Луны с точностью до миллиметра и тесты общей теории относительности проводить . MOLA , орбитальный лазерный альтиметр Марса , использовал лидар на орбитальном спутнике Марса (NASA Mars Global Surveyor ) для получения невероятно точной глобальной топографической съемки Красной планеты. Лазерные альтиметры создавали глобальные модели рельефа Марса, Луны (лазерный альтиметр лунного орбитального аппарата (LOLA)), Меркурия (лазерный альтиметр ртути (MLA)), лазерного дальномера NEAR – Shoemaker (NLR). [ 144 ] Будущие миссии также будут включать эксперименты с лазерным высотомером, такие как лазерный высотомер Ганимеда (GALA) в рамках миссии «Исследователь ледяных лун Юпитера» (JUICE). [ 144 ]
НАСА «Феникс» В сентябре 2008 года посадочный модуль использовал лидар для обнаружения снега в атмосфере Марса. [ 145 ]
В физике атмосферы лидар используется в качестве инструмента дистанционного обнаружения для измерения плотности определенных компонентов средней и верхней атмосферы, таких как калий , натрий или молекулярный азот и кислород . Эти измерения можно использовать для расчета температуры. Лидар также можно использовать для измерения скорости ветра и предоставления информации о вертикальном распределении аэрозольных частиц . [ 146 ]
В JET исследовательском центре ядерного синтеза , расположенном в Великобритании недалеко от Абингдона, Оксфордшир , лидар Томсоновского рассеяния используется для определения электронной профилей плотности и температуры плазмы . [ 147 ]
Рок-механика
[ редактировать ]Лидар широко используется в механике горных пород для определения характеристик горных пород и обнаружения изменений откосов. Некоторые важные геомеханические свойства массива горных пород можно извлечь из трехмерных облаков точек, полученных с помощью лидара. Некоторые из этих свойств:
- Ориентация разрыва [ 148 ] [ 149 ] [ 150 ]
- Расстояние между разрывами и RQD [ 150 ] [ 151 ] [ 152 ]
- Диафрагма разрыва
- Постоянство разрыва [ 150 ] [ 152 ] [ 153 ]
- Несплошность, шероховатость [ 152 ]
- Инфильтрация воды
Некоторые из этих свойств использовались для оценки геомеханического качества массива горных пород с помощью индекса RMR . Более того, поскольку ориентацию разрывов можно определить с помощью существующих методологий, можно оценить геомеханическое качество откоса породы с помощью индекса SMR . [ 154 ] В дополнение к этому, сравнение различных трехмерных облаков точек со склона, полученных в разное время, позволяет исследователям изучать изменения, произошедшие на месте происшествия за этот временной интервал в результате камнепадов или любых других оползневых процессов. [ 155 ] [ 156 ] [ 157 ]
ТОР
[ редактировать ]THOR — это лазер, предназначенный для измерения атмосферных условий Земли. Лазер входит в облачный покров [ 158 ] и измеряет толщину возвратного гало. Датчик имеет оптоволоконную апертуру шириной 7 + 1 ⁄ дюйма (19 см) , который используется для измерения отраженного света.
Робототехника
[ редактировать ]Лидарная технология используется в робототехнике для восприятия окружающей среды, а также классификации объектов. [ 159 ] Способность лидарной технологии предоставлять трехмерные карты высот местности, высокую точность расстояния до земли и скорости приближения может обеспечить безопасную посадку роботизированных и пилотируемых транспортных средств с высокой степенью точности. [ 26 ] Лидары также широко используются в робототехнике для одновременной локализации и картографирования и хорошо интегрируются в симуляторы роботов. [ 160 ] Дополнительные примеры см. в разделе «Военные» выше.
Космический полет
[ редактировать ]Лидар все чаще используется для определения дальности и орбитального элемента расчета относительной скорости в операциях сближения и удержании космического корабля . Лидар также использовался для исследования атмосферы из космоса. Короткие импульсы лазерного света, излучаемого космическим кораблем, могут отражаться от мельчайших частиц в атмосфере и возвращаться в телескоп, совмещенный с лазером космического корабля. Точно синхронизируя эхо лидара и измеряя количество лазерного света, принимаемого телескопом, ученые могут точно определить местоположение, распределение и природу частиц. Результатом стал революционно новый инструмент для изучения компонентов атмосферы, от капель облаков до промышленных загрязнителей, которые трудно обнаружить другими способами». [ 161 ] [ 162 ]
Лазерная альтиметрия используется для создания цифровых карт рельефа планет, в том числе карт Марса с помощью орбитального лазерного альтиметра (MOLA). [ 163 ] Лунный орбитальный лазерный высотомер (LOLA) [ 164 ] и картографирование Луны с помощью лунного альтиметра (LALT) и картирование Меркурия с помощью ртутного лазерного альтиметра (MLA). [ 165 ] Он также используется для помощи в навигации вертолета Ingenuity в его рекордных полетах над поверхностью Марса . [ 8 ]
Геодезия
[ редактировать ]
Бортовые лидарные датчики используются компаниями в области дистанционного зондирования. Их можно использовать для создания ЦМР (цифровой модели местности) или ЦМР ( цифровой модели рельефа ); это вполне обычная практика для больших территорий, поскольку самолет может приобрести Полосы шириной 3–4 км (2–2 + 1 ⁄ 2 мили ) за одну эстакаду. Более высокая вертикальная точность менее 50 мм (2 дюйма) может быть достигнута при более низкой эстакаде даже в лесу, где она способна определить высоту кроны, а также высоту земли. ) требуется приемник GNSS, настроенный на контрольную точку с географической привязкой Обычно для связи данных с WGS ( Всемирной геодезической системой . [ 166 ]
Лидар также используется в гидрографических съемках . В зависимости от прозрачности воды лидар может измерять глубину от 0,9 до 40 м (от 3 до 131 фута) с точностью по вертикали 15 см (6 дюймов) и по горизонтали 2,5 м (8 футов). [ 167 ]
Транспорт
[ редактировать ]
Лидар использовался в железнодорожной отрасли для создания отчетов о состоянии активов для управления активами, а также в департаментах транспорта для оценки состояния дорог. CivilMaps.com — ведущая компания в этой области. [ 168 ] Лидар использовался в системах адаптивного круиз-контроля (ACC) для автомобилей. Такие системы, как системы Siemens, Hella, Ouster и Cepton, используют лидарное устройство, установленное на передней части автомобиля, например, на бампере, для контроля расстояния между автомобилем и любым транспортным средством перед ним. [ 169 ] Если идущий впереди автомобиль замедляет движение или приближается слишком близко, ACC задействует тормоза, чтобы замедлить автомобиль. Когда дорога впереди свободна, ACC позволяет автомобилю разогнаться до скорости, заданной водителем. Дополнительные примеры см. в разделе «Военные» выше. Устройство на основе лидара Ceilometer используется в аэропортах по всему миру для измерения высоты облаков на траекториях захода на посадку на взлетно-посадочной полосе. [ 170 ] [ нужна ссылка ]
Оптимизация ветряной электростанции
[ редактировать ]Лидар можно использовать для увеличения выработки энергии ветряными электростанциями за счет точного измерения скорости ветра и турбулентности ветра. [ 171 ] [ 172 ] Экспериментальные лидарные системы [ 173 ] [ 174 ] может быть установлен на гондоле [ 175 ] или ветряной турбины интегрированный во вращающуюся вертушку [ 176 ] для измерения встречного горизонтального ветра, [ 177 ] ветер вслед за ветряной турбиной, [ 178 ] и заранее отрегулируйте лезвия, чтобы защитить компоненты и увеличить мощность. Лидар также используется для характеристики падающего ветрового ресурса для сравнения с выработкой энергии ветряной турбиной для проверки производительности ветряной турбины. [ 179 ] путем измерения кривой мощности ветряной турбины. [ 180 ] Оптимизацию ветряных электростанций можно считать темой прикладной политики . Еще одним аспектом лидара в ветроэнергетике является использование вычислительной гидродинамики на поверхностях, сканированных лидаром, для оценки ветрового потенциала. [ 181 ] который можно использовать для оптимального размещения ветровых электростанций.
Оптимизация развертывания солнечных фотоэлектрических систем
[ редактировать ]Лидар также можно использовать для оказания помощи проектировщикам и разработчикам в оптимизации солнечных фотоэлектрических систем на уровне города путем определения подходящих крыш. [ 182 ] [ 183 ] и для определения потерь затенения . [ 184 ] Недавние усилия по воздушному лазерному сканированию были сосредоточены на способах оценки количества солнечного света, попадающего на вертикальные фасады зданий. [ 185 ] или путем включения более подробных потерь затенения с учетом влияния растительности и более крупной окружающей местности. [ 186 ]
Видеоигры
[ редактировать ]В последних гоночных играх-симуляторах, таких как rFactor Pro , iRacing , Assetto Corsa и Project CARS, гоночные трассы все чаще воспроизводятся из трехмерных облаков точек, полученных с помощью лидарных исследований, в результате чего поверхности воспроизводятся с точностью до сантиметра или миллиметра в игровой трехмерной среде. . [ 187 ] [ 188 ] [ 189 ]
Исследовательская игра Scanner Sombre 2017 года от Introversion Software использует лидар в качестве фундаментальной игровой механики.
В Build the Earth лидар используется для создания точных изображений местности в Minecraft для учета любых ошибок (в основном, касающихся высоты) при генерации по умолчанию. Процесс рендеринга ландшафта в Build the Earth ограничен объемом данных, доступных в регионе, а также скоростью, необходимой для преобразования файла в блочные данные.
Другое использование
[ редактировать ]
Клип на песню « House of Cards » Radiohead 2007 года считался первым применением 3D-лазерного сканирования в реальном времени для записи музыкального видео. Данные о дальности на видео не полностью получены с лидара, так как также используется структурированное световое сканирование. [ 190 ]
В 2020 году Apple представила iPad Pro четвертого поколения с лидарным датчиком, встроенным в модуль задней камеры , специально разработанным для работы с дополненной реальностью (AR). [ 191 ] Позже эта функция была включена в линейку iPhone 12 Pro и последующие модели Pro. [ 192 ] На устройствах Apple лидар позволяет делать снимки в портретном режиме с ночным режимом, ускоряет автофокусировку и повышает точность в приложении «Измерение» .
В 2022 году «Колесо фортуны» начало использовать лидарную технологию, чтобы отслеживать, когда Ванна Уайт проводит рукой по доске-головоломке, открывая буквы. Первый эпизод, в котором использовалась эта технология, был в премьере 40-го сезона. [ 193 ]
Альтернативные технологии
[ редактировать ]Компьютерное стереовидение оказалось многообещающим в качестве альтернативы лидару для приложений ближнего радиуса действия. [ 194 ]
См. также
[ редактировать ]- Атомный линейный фильтр - оптический полосовой фильтр, используемый в физических науках.
- Облакомер — наземный лидар для измерения высоты облаков.
- Турбулентность ясного воздуха - Турбулентное движение прозрачных воздушных масс.
- CLidar — научный инструмент.
- Геодиметр - оптический электронный дальномер.
- Измерение геологической структуры с помощью LiDAR – измерение местности с помощью световых лучей
- Лазерный дальномер - дальномер, использующий лазерный луч для определения расстояния до объекта.
- Формат файла LAS — для обмена данными облака точек лидара.
- libLAS — библиотека C++ под лицензией BSD для чтения/записи лидарных данных ASPRS LAS.
- Детектор лидаров — лидар, используемый для измерения скорости транспортных средств.
- Список лазерных статей
- Национальный набор лидарных данных - набор лидарных данных высокого разрешения, включающий большую часть страниц местности страны, (все страны).
- Национальный набор данных лидара (США)
- Optech -
- Оптическое гетеродинное обнаружение
- Оптический рефлектометр во временной области - Оптоэлектронный прибор
- Фотограмметрия – проведение измерений с помощью фотографии.
- Визуализация диапазона – техника измерения
- Спутниковая лазерная локация
- Картографирование морского дна#LiDAR
- SODAR — Метеорологический инструмент.
- Рефлектометрия во временной области — электронный прибор.
- ТопоПолет
Ссылки
[ редактировать ]- ^ Национальное управление океанических и атмосферных исследований (26 февраля 2021 г.). «Что такое ЛИДАР» . Oceanservice.noaa.gov . Министерство торговли США . Проверено 15 марта 2021 г.
- ^ Трэвис С. Тейлор (2019). Введение в лазерную науку и технику . ЦРК Пресс.
- ^ Цзе Шань и Чарльз К. Тот (2018). Топографическая лазерная локация и сканирование: принципы и обработка (2-е изд.). ЦРК Пресс.
- ^ «Внедрение лидарных датчиков на основе галлия набирает обороты» . www.argusmedia.com . 29.06.2021 . Проверено 14 июля 2021 г.
- ^ «Экологи сравнивают точность лидарных технологий для мониторинга лесной растительности: результаты показывают, что мобильные платформы имеют большой потенциал для мониторинга различных атрибутов леса» . ScienceDaily . Проверено 14 июля 2021 г.
- ^ Jump up to: а б с д и Крэкнелл, Артур П.; Хейс, Ладсон (2007) [1991]. Введение в дистанционное зондирование (2-е изд.). Лондон: Тейлор и Фрэнсис. ISBN 978-0-8493-9255-9 . OCLC 70765252 .
- ^ Jump up to: а б Лим, Хейзел Си Мин; Тайхах, Араз (2019). «Алгоритмическое принятие решений в AV: понимание этических и технических проблем для умных городов» . Устойчивость . 11 (20): 5791. arXiv : 1910.13122 . дои : 10.3390/su11205791 .
- ^ Jump up to: а б «Как НАСА разработало вертолет, который мог бы автономно летать на Марсе» . IEEE-спектр . 17 февраля 2021 года. Архивировано из оригинала 19 февраля 2021 года . Проверено 19 февраля 2021 г.
- ^ Гальего Торроме, Рикардо; Барзандже, Шабир (2023). «Достижения в области квантового радара и квантового лидара». Достижения квантовой электроники . 93 : 100497. arXiv : 2310.07198 . doi : 10.1016/j.pquantelec.2023.100497 .
- ^ «Новая радиолокационная система». Одесский американец . 28 февраля 1961 года.
- ^ Jump up to: а б Макомбер, Фрэнк (3 июня 1963 г.). «Космические эксперты ищут средства для мощного лазерного света» . Бейкерсфилд Калифорния . № 5. Служба новостей Копли . Проверено 11 июля 2019 г.
- ^ Стич, МЛ; Вудберри, Э.Дж.; Морс, Дж. Х. (21 апреля 1961 г.). «Система оптической локации использует лазерный передатчик». Электроника . 34 : 51–53.
- ^ «Лазер измеряет расстояние». Звезда журнала Линкольн . № 6. 29 марта 1963 г.
- ↑ Джеймс Ринг, «Лазер в астрономии», стр. 672–673, New Scientist , 20 июня 1963 г.
- ^ Оксфордский словарь английского языка . 2013. с. Запись для «лидара».
- ^ Jump up to: а б «Фотонный радар» . Технион – Израильский технологический институт . 27 мая 2016 года . Проверено 12 августа 2018 г.
- ^ Jump up to: а б «Радиооптическая РЛС с фазированной решеткой – комплексное исследование» . Полный форсаж . Проверено 12 августа 2018 г.
- ^ Гойер, Г.Г.; Р. Уотсон (сентябрь 1963 г.). «Лазер и его применение в метеорологии» . Бюллетень Американского метеорологического общества . 44 (9): 564–575 [568]. Бибкод : 1963BAMS...44..564G . дои : 10.1175/1520-0477-44.9.564 .
- ^ «НАЖМИТЕ» . Lidar.cr.usgs.gov . 16 сентября 2015 г. Архивировано из оригинала 19 февраля 2016 г. Проверено 22 февраля 2016 г.
- ^ «Поиск на NYTimes.com» . Нью-Йорк Таймс . Проверено 7 апреля 2017 г.
- ^ «Подразделение беспилотных автомобилей Waymo теперь подает в суд на инженера Uber» . Нью-Йорк Таймс . 2017-03-29 . Проверено 7 апреля 2017 г.
- ^ Картер, Джейми; Кейл Шмид; Кирк Уотерс; Линди Бетцхольд; Брайан Хэдли; Ребекка Матаоски; Дженнифер Халлеран (2012). «Лидар 101: Введение в лидарные технологии, данные и приложения» (PDF) . Центр береговых служб NOAA . п. 14. Архивировано (PDF) из оригинала 9 октября 2022 г. Проверено 11 февраля 2017 г.
- ^ Философский журнал и журнал науки , 1930, серия 7, том 9, выпуск 60, стр. 1014–1020.
- ^ Донеган, Дж. Ф.; Жизнь и творчество Эдварда Хатчинсона Синге , стр. 31, 67 (под редакцией Д. Вейра и П. Флоридеса ), Пёллауберг, Австрия: Живое издание, ISBN 3-901585-17-6 .
- ^ «Экспериментальный лидар передовых исследований», USGS.gov . Проверено 8 августа 2007 г.
- ^ Jump up to: а б Амзаджердян, Фарзин; Пьеротте, Диего Ф.; Петвей, Ларри Б.; Хайнс, Гленн Д.; Робак, Винсент Э. (24 мая 2011 г.). «Лидарные системы для точной навигации и безопасной посадки на планетные тела» . Международный симпозиум по фотоэлектронному обнаружению и визуализации 2011: Лазерное зондирование и визуализация; и биологические и медицинские применения фотонного зондирования и визуализации . Том. 8192. с. 819202. Бибкод : 2011SPIE.8192E..02A . дои : 10.1117/12.904062 . hdl : 2060/20110012163 . S2CID 28483836 . Проверено 24 мая 2011 г.
- ^ П. Дакин, Джон; Браун, Роберт (2017). Справочник по оптоэлектронике: понятия, устройства и методы (том первый) . ЦРК Пресс. п. 678. ИСБН 978-1-4822-4179-2 .
- ^ Рорбах, Феликс (4 февраля 2015 г.). «Введение в LiDAR» . felix.rohrba.ch . Проверено 28 марта 2022 г.
- ^ Рашид Александрович Ганеев (2013). Взаимодействие лазера с поверхностью . Springer Science & Business Media. п. 32. ISBN 978-94-007-7341-7 .
- ^ Jump up to: а б с Мокей, Ник (15 марта 2018 г.). «Автомобиль с автоматическим управлением на каждой дороге? Ключ к успеху — полупроводниковый лидар» . Цифровые тенденции . Проверено 15 июня 2018 г.
- ^ «Удаленные датчики | Данные о Земле» . Earthdata.nasa.gov . Проверено 18 марта 2017 г.
 В данную статью включен текст из этого источника, находящегося в свободном доступе .
В данную статью включен текст из этого источника, находящегося в свободном доступе .
- ^ «Advanced Scientific Concepts Inc» . asc3d.com . Проверено 3 июля 2022 г.
- ^ Патент США 5081530 , Медина, Антонио, «Трехмерная камера и дальномер», выдан 14 января 1992 г., передан Медине, Антонио.
- ^ Медина А., Гая Ф., Посо Ф. (2006). «Компактный лазерный радар и трехмерная камера». Журнал Оптического общества Америки А. 23 (4): 800–805. Бибкод : 2006JOSAA..23..800M . дои : 10.1364/josaa.23.000800 . ПМИД 16604759 .
- ^ Jump up to: а б Штраус, CEM (1994). «Гетеродинное обнаружение на синтетической матрице: одноэлементный детектор действует как массив» . Оптические письма . 19 (20): 1609–1611. Бибкод : 1994OptL...19.1609S . дои : 10.1364/ол.19.001609 . ПМИД 19855597 .
- ^ «Самый мощный в мире лазерный 3D-сканер» . Technologyreview.com . 13 февраля 2014 г. Проверено 6 апреля 2017 г.
- ^ Талбот, Дэвид (13 февраля 2014 г.). «Новый оптический чип улучшит качество военных и археологических аэрофотоснимков» . Обзор технологий Массачусетского технологического института . Проверено 17 февраля 2014 г.
- ^ Хэдфилд, Роберт Х.; Лич, Джонатан; Флеминг, Фиона; Пол, Дуглас Дж.; Тан, Чи Хинг; Нг, Джо Шиен; Хендерсон, Роберт К.; Буллер, Джеральд С. (2023). «Однофотонное обнаружение для визуализации и зондирования на больших расстояниях» . Оптика . 10 (9): 1124. Бибкод : 2023Optic..10.1124H . дои : 10.1364/optica.488853 . hdl : 20.500.11820/4d60bb02-3c2c-4f86-a737-f985cb8613d8 . Проверено 29 августа 2023 г.
- ^ Jump up to: а б «Advanced Scientific Concepts Inc» . Advancedscientificconcepts.com . Проверено 8 марта 2019 г.
- ^ «Патентные данные» . Technology.nasa.gov . Проверено 8 марта 2019 г.
- ^ «Аналогово-цифровое преобразование: дискретизация» . cl.cam.ac.uk. Проверено 8 марта 2019 г.
- ^ Визуальный флэш-лидар для автономной безопасной посадки и сближения космических аппаратов . Конференция AIAA Space 2016. Сервер технических отчетов НАСА . 07.05.2019.
- ^ Дитрих, Энн Браун, «Поддержка автономной навигации с помощью флэш-лидарных изображений в непосредственной близости от малых небесных тел» (2017). CU Boulder Дипломные и диссертационные работы в области аэрокосмической инженерии . 178.
- ^ Jump up to: а б «Дикий Запад автомобильного лидара» . сайт шпиона . Проверено 26 декабря 2020 г.
- ^ Jump up to: а б Воссельман, Джордж; Маас, Ханс-Герд (2012). Воздушное и наземное лазерное сканирование . Издательство Уиттлс. ISBN 978-1-904445-87-6 .
- ^ Донеус, М.; Михолек, И.; Мандльбургер, Г.; Донеус, Н.; Верховен, Г.; Бризе, Ч.; Прегесбауэр, М. (2015). «Аэромобильная лазерная батиметрия для документирования затопленных археологических объектов на мелководье» . ISPRS — Международные архивы фотограмметрии, дистанционного зондирования и пространственной информатики . XL-5/W5: 99–107. Бибкод : 2015ISPArXL55...99D . doi : 10.5194/isprsarchives-xl-5-w5-99-2015 . hdl : 1854/LU-5933247 .
- ^ Чиу, Ченг-Лунг; Фэй, Ли-Юань; Лю, Цзинь-Кинг; Ву, Минг-Чи. «Национальное картирование с помощью бортового лидара и примеры применения при глубоких оползнях на Тайване». Симпозиум по геонаукам и дистанционному зондированию (IGARSS), 2015 IEEE International . ISSN 2153-7003 .
- ^ Jump up to: а б Юань, Цзэн; Юджин, Чжао; Дэн, Чжао; Бинфанг, Ву. «Картирование биоразнообразия лесов с использованием авиационных и гиперспектральных данных». Симпозиум по геонаукам и дистанционному зондированию (IGARSS), 2016 IEEE International . ISSN 2153-7003 .
- ^ Тан, Лина; Шао, Гофан (21 июня 2015 г.). «Дронное дистанционное зондирование для исследований и практики лесного хозяйства». Журнал лесных исследований . 26 (4): 791–797. дои : 10.1007/s11676-015-0088-y . ISSN 1007-662X . S2CID 15695164 .
- ^ Jump up to: а б с «Зеленый лидар Наеганди» (PDF) . Архивировано (PDF) из оригинала 9 октября 2022 г.
- ^ Jump up to: а б «1.2.2 Батиметрический лидар» . home.iitk.ac.in. Проверено 15 января 2023 г.
- ^ Сапутра, Роми; Раджаване, Ивонн; Парк, Х; Гуларсо, Эрьюно (2021). «Влияние мутности, температуры и солености воды на данные глубины, полученные с помощью воздушной батиметрии LiDAR» . Серия конференций IOP: Науки о Земле и окружающей среде . 925 (1): 012056. Бибкод : 2021E&ES..925a2056S . дои : 10.1088/1755-1315/925/1/012056 . S2CID 244918525 .
- ^ Уилсон, Джерри К. (2008). «Использование бортового гидрографического LiDAR для картографирования вод Калифорнии». ОКЕАНЫ 2008 — MTS/IEEE Кобе Техно-Океан . стр. 1–8. дои : 10.1109/OCEANSKOBE.2008.4530980 . ISBN 978-1-4244-2126-8 . S2CID 28911362 .
- ^ Jump up to: а б Мильтиаду, М.; Грант, Майкл Г.; Кэмпбелл, НДФ; Уоррен, М.; Клюли, Д.; Хаджимицис, Диофантос Г. (27 июня 2019 г.). «Программное обеспечение с открытым исходным кодом DASOS: эффективное накопление, анализ и визуализация полноволнового лидара» . В Пападавиде, Гиоргос; Фемистоклий, Кириак; Михаэлидис, Сайлас; Амброзия, Винсент; Хаджимицис, Диофантос Дж. (ред.). Седьмая международная конференция по дистанционному зондированию и геоинформации окружающей среды (RSCy2019) . Том. 11174. Международное общество оптики и фотоники. стр. 111741М. Бибкод : 2019SPIE11174E..1MM . дои : 10.1117/12.2537915 . ISBN 978-1-5106-3061-1 . S2CID 197660590 .
- ^ Вагнер, Вольфганг; Ульрих, Андреас; Дучич, Весна; Мельцер, Томас; Студницка, Ник (1 апреля 2006 г.). «Гауссово разложение и калибровка нового малогабаритного бортового лазерного сканера с полноволновой оцифровкой» . Журнал фотограмметрии и дистанционного зондирования ISPRS . 60 (2): 100–112. Бибкод : 2006JPRS...60..100Вт . дои : 10.1016/j.isprsjprs.2005.12.001 . ISSN 0924-2716 .
- ^ Чжуан, Вэй; Маунтракис, Гиоргос; Уайли, Джон Дж. Младший; Бейер, Колин М. (3 апреля 2015 г.). «Оценка биомассы надземного леса с использованием показателей, основанных на разложении по Гауссу лидарных данных». Международный журнал дистанционного зондирования . 36 (7): 1871–1889. Бибкод : 2015IJRS...36.1871Z . дои : 10.1080/01431161.2015.1029095 . ISSN 0143-1161 . S2CID 55987035 .
- ^ Мильтиаду, Мильто; Кэмпбелл, Нил Д.Ф.; Гонсалес Арасил, Сусана; Браун, Тони; Грант, Майкл Г. (01 мая 2018 г.). «Обнаружение мертвого эвкалипта камальдульского без разграничения деревьев для управления биоразнообразием в естественных австралийских лесах» . Международный журнал прикладного наблюдения Земли и геоинформации . 67 : 135–147. Бибкод : 2018IJAEO..67..135M . дои : 10.1016/j.jag.2018.01.008 . hdl : 20.500.14279/19541 . ISSN 0303-2434 .
- ^ Ли, Санг-Мук; Я, Чон Джун; Ли, Бо-Хи; Леонесса, Александр; Курдила, Эндрю (2010). «Создание сетчатой карты в реальном времени и классификация объектов для данных наземного 3D-лидара с использованием методов анализа изображений» . Международная конференция IEEE 2010 по обработке изображений . стр. 2253–2256. дои : 10.1109/ICIP.2010.5651197 . ISBN 978-1-4244-7992-4 .
- ^ «Лидарная лазерная технология: от беспилотных автомобилей до танцевальных конкурсов» . Рейтер . 7 января 2020 г.
- ^ «Исследование ARS помогает фермерам максимально эффективно использовать удобрения» . Служба сельскохозяйственных исследований Министерства сельского хозяйства США. 9 июня 2010 г.
- ^ Гебру, Алем; Янссон, Сэмюэл; Игнелл, Рикард; Киркеби, Карстен; Брайдегор, Миккель (14 мая 2017 г.). «Мультиспектральная поляриметрическая модуляционная спектроскопия для определения вида и пола переносчиков малярии». Конференция по лазерам и электрооптике . Оптическое общество Америки. стр. ATh1B.2. дои : 10.1364/CLEO_AT.2017.ATh1B.2 . ISBN 978-1-943580-27-9 . S2CID 21537355 .
- ^ «Усовершенствования оптических систем дистанционного зондирования воздушной и водной фауны и их использование» . Гугл Патенты . Проверено 4 июня 2019 г.
- ^ Jump up to: а б Вайс, Ульрих; Бибер, Питер; Лайбле, Стефан; Больманн, Карстен; Зелл, Андреас (2010). «Классификация видов растений с использованием 3D-лидарного датчика и машинного обучения». 2010 Международная конференция по машинному обучению и приложениям . ISBN 978-1-4244-9211-4 .
- ^ «ЭИД; кратер под пологом» . Unb.ca. 18 февраля 2013 г. Проверено 6 мая 2013 г.
- ^ Световой фантастический: использование воздушного лидара в археологических исследованиях . Английское наследие . 2010. с. 45.
- ^ Джон Нобель Уилфорд (10 мая 2010 г.). «Картирование древней цивилизации за считанные дни» . Нью-Йорк Таймс . Проверено 11 мая 2010 г.
- ^ Стефани Паппас (15 мая 2013 г.). «Руины затерянного города могут скрываться глубоко в тропических лесах Гондураса» . Живая наука . Проверено 15 мая 2013 г.
- ^ Дуглас Престон (2 марта 2015 г.). «Затерянный город обнаружен в тропическом лесу Гондураса» . Нэшнл Географик . Архивировано из оригинала 3 марта 2015 года . Проверено 3 марта 2015 г.
- ^ «Джунгли сдают свой затерянный город» . Smh.com.au. 14 июня 2013 г. Проверено 22 февраля 2016 г.
- ^ Джонсон, Кэтрин М; Уиме, Уильям Б. (2014). «Повторное открытие утраченного археологического ландшафта юга Новой Англии с использованием бортового светового обнаружения и измерения дальности (LiDAR)». Журнал археологической науки . 43 : 9–20. Бибкод : 2014JArSc..43....9J . дои : 10.1016/j.jas.2013.12.004 .
- ^ Эдвин Картлидж (10 января 2014 г.). «Лазеры раскопали затерянный агрополис Новой Англии | Наука | AAAS» . News.sciencemag.org . Проверено 22 февраля 2016 г.
- ^ « Потерянная» Новая Англия обнаружена с помощью высокотехнологичной археологии» . News.nationalgeographic.com . 03.01.2014. Архивировано из оригинала 7 января 2014 года . Проверено 22 февраля 2016 г.
- ^ Эванс, Д.Х.; Флетчер, Р.Дж.; и др. (2013). «Раскрытие археологических ландшафтов Ангкора с помощью лидара» . ПНАС . 110 (31): 12595–12600. Бибкод : 2013PNAS..11012595E . дои : 10.1073/pnas.1306539110 . ПМК 3732978 . ПМИД 23847206 .
- ^ Дэвис, Никола (15 февраля 2018 г.). «Лазерное сканирование показывает, что в «затерянном» древнем мексиканском городе «было столько же зданий, сколько на Манхэттене» » . The Guardian – через www.theguardian.com.
- ^ «Сканирование LiDAR показывает сложную сеть дорог цивилизации майя» . Смитсонианмаг.com . Проверено 28 февраля 2018 г.
- ^ «Древние супермагистрали майя найдены в джунглях Гватемалы» . 27 января 2017 г.
- ^ «Эта древняя цивилизация была вдвое больше средневековой Англии» . 01.02.2018. Архивировано из оригинала 1 февраля 2018 года . Проверено 5 февраля 2018 г.
- ^ «Археологи находят древние затерянные города с помощью лазеров» . MSN.com . Проверено 8 сентября 2019 г.
- ^ «Эта древняя цивилизация была вдвое больше средневековой Англии» . Национальные географические новости . 01.02.2018. Архивировано из оригинала 7 августа 2019 года . Проверено 8 сентября 2019 г.
- ^ «Под джунглями Гватемалы обнаружена обширная сеть майя» . 2018-02-02.
- ^ «Археологи с помощью лазеров находят древние затерянные города майя в Гватемале» . Newsweek . 29 сентября 2018 г.
- ^ Маленькая, Бекки. «Лазеры выявили 60 000 древних построек майя в Гватемале» . История . Проверено 8 сентября 2019 г.
- ^ «Скрытый древний мегаполис майя с 60 000 структурами обнаружен в Гватемале с помощью лазеров» . Yahoo.com . Архивировано из оригинала 5 сентября 2019 г. Проверено 8 сентября 2019 г.
- ^ Берке, Джереми (2 февраля 2018 г.). «Археологи нашли тысячи скрытых сооружений в джунглях Гватемалы – и это может переписать человеческую историю» . Бизнес-инсайдер . Проверено 8 сентября 2019 г.
- ^ «Скрытый древний мегалопис майя с 60 000 структурами обнаружен в Гватемале с помощью лазеров» . Newsweek . 2018-02-02.
- ^ Чуквура, Драгоценный (30 сентября 2018 г.). «Археологи с помощью лазеров обнаружили древний затерянный город майя в Северной Гватемале» . Новости развлечений, музыка, видео, образ жизни Нигерии . Проверено 8 сентября 2019 г.
- ^ Венер, Майк (2 февраля 2018 г.). «Археологи обнаружили древний мегаполис майя, спрятанный в джунглях Гватемалы» . БГР . Проверено 8 сентября 2019 г.
- ^ «Было нанесено на карту группа затерянных городов в эквадорской Амазонии, просуществовавшая 1000 лет» . Ассошиэйтед Пресс . 11 января 2024 г.
- ^ Стивен Ростейн; Антуан Дорисон; Жоффруа де Солье; Хайко Прюмерс; Жан-Люк Ле Пеннек; Фернандо Мехия Мехия; Ана Марица Фрейре; Хайме Р. Паган-Хименес; Филипп Дескола (11 января 2024 г.). «Две тысячи лет садового урбанизма в Верхней Амазонке» . Наука . 383 (6679): 183–189. Бибкод : 2024Sci...383..183R . дои : 10.1126/science.adi6317 . ПМИД 38207020 .
- ^ Стив Таранович, EDN. « Автономные автомобильные датчики: как алгоритмы процессора получают входные данные ». 5 июля 2016 г. Проверено 9 августа 2016 г.
- ^ «Устная история конкурса Darpa Challenge, изнурительной гонки роботов, в результате которой появился беспилотный автомобиль» . Проводной . ISSN 1059-1028 . Проверено 24 декабря 2020 г.
- ^ «Филиппинцы превращают обычный автомобиль в автономный автомобиль – Motioncars» . Motioncars.inquirer.net . 25 мая 2015 г. Проверено 22 февраля 2016 г.
- ^ Jump up to: а б Такаги, Киёкадзу; Морикава, Кацухиро; Огава, Такаси; Сабури, Макото (2006). «Распознавание дорожной обстановки с использованием бортового лидара». Симпозиум IEEE по интеллектуальным транспортным средствам , 2006 г. стр. 120–125. дои : 10.1109/IVS.2006.1689615 . ISBN 978-4-901122-86-3 . S2CID 15568035 .
- ^ Хасирлиоглу, Синан; Каманн, Александр; Дорик, Игорь; Брандмайер, Томас (2016). «Методология испытаний на влияние дождя на автомобильные датчики окружающего пространства». 2016 IEEE 19-я Международная конференция по интеллектуальным транспортным системам (ITSC) . стр. 2242–2247. дои : 10.1109/ITSC.2016.7795918 . ISBN 978-1-5090-1889-5 . S2CID 2334608 .
- ^ Чжоу, Кун; Ван, Сицинь; Томизукат, Масаеши; Чжан, Вэй-Бин; Чант, Чинг-Яо (2002). «Новый алгоритм сопровождения маневрирующих целей с оценкой входных данных». Материалы Американской конференции по контролю 2002 г. (№ по каталогу IEEE CH37301) . Том. 1. С. 166–171. дои : 10.1109/ACC.2002.1024798 . ISBN 978-0-7803-7298-6 . S2CID 114167319 .
- ^ Ю. Хата, Альберто; Ф. Вольф, Денис. «Обнаружение функций для локализации транспортных средств в городской среде с использованием многослойного лидара». Транзакции IEEE в интеллектуальной транспортной системе . 17 (2). ISSN 1558-0016 .
- ^ Jump up to: а б Линднер, Филипп; Ваниелик, Герд (2009). «Обработка 3D LIDAR для обеспечения безопасности транспортных средств и распознавания окружающей среды». Семинар IEEE 2009 г. по вычислительному интеллекту в транспортных средствах и автомобильных системах . стр. 66–71. дои : 10.1109/CIVVS.2009.4938725 . ISBN 978-1-4244-2770-3 . S2CID 18520919 .
- ^ Гиббс, Сэмюэл (7 сентября 2015 г.). «Хакеры могут обманом заставить беспилотные автомобили уклониться» . Хранитель .
- ^ Сюй, Хайцин; Томан, Элизабет; Чжао, Кайгуан; Бэрд, Джон (2022). «Объединение лидара и аэрофотоснимков для картирования водно-болотных угодий и каналов с помощью глубокой сверточной нейронной сети» . Отчет о транспортных исследованиях . 2676 (12): 374–381. дои : 10.1177/03611981221095522 . S2CID 251780248 .
- ^ Нэссет, Эрик (апрель 1997 г.). «Определение средней высоты деревьев древостоев по данным воздушного лазерного сканера». Журнал фотограмметрии и дистанционного зондирования ISPRS . 52 (2): 49–56. Бибкод : 1997JPRS...52...49N . дои : 10.1016/S0924-2716(97)83000-6 .
- ^ Джонсон, Лукас; Махони, Майкл; Бевилаква, Эдди; Стеман, Стивен; Домке, Грант; Бейер, Колин (ноябрь 2022 г.). «Картирование биомассы в ландшафтном масштабе с высоким разрешением с использованием пространственно-временного лоскутного покрытия LiDAR» . Международный журнал прикладного наблюдения Земли и геоинформации . 114 : 103059. arXiv : 2205.08530 . дои : 10.1016/j.jag.2022.103059 . S2CID 248834425 .
- ^ Морсдорф, Феликс; Кётц, Бенджамин; Мейер, Эрих; Иттен, К.И.; Аллговер, Бритта (15 сентября 2006 г.). «Оценка LAI и фракционного покрытия на основе данных воздушного лазерного сканирования малой площади на основе доли зазора». Дистанционное зондирование окружающей среды . 104 (1): 50–61. Бибкод : 2006RSEnv.104...50M . дои : 10.1016/j.rse.2006.04.019 .
- ^ Чжао, Кайгуан; Попеску, Сорин (2009). «Картирование индекса площади листьев на основе лидара и его использование для проверки спутниковых данных LAI GLOBCARBON в лесах умеренного пояса на юге США» . Дистанционное зондирование окружающей среды . 113 (8): 1628–1645. Бибкод : 2009RSEnv.113.1628Z . дои : 10.1016/j.rse.2009.03.006 .
- ^ «Ссылки на использование лидара в картографии» . Lidarbasemaps.org . Проверено 22 февраля 2016 г.
- ^ Клоджес, Рик; Вирлинг, Керри; Вирлинг, Ли; Роуэлл, Эрик (15 мая 2008 г.). «Использование воздушного лидара для оценки разнообразия, плотности и встречаемости видов птиц в сосновом/осиновом лесу». Дистанционное зондирование окружающей среды . 112 (5): 2064–2073. Бибкод : 2008RSEnv.112.2064C . дои : 10.1016/j.rse.2007.08.023 . ISSN 0034-4257 .
- ^ Моеслунд, Йеспер Эреншельд; Злински, Андраш; Эйрнес, Расмус; Брунбьерг, Ане Кирстин; Книги, Педер Клит; Свеннинг, Йенс-Кристиан; Норманд, Сигне (04 января 2019 г.). «ЛИДАР объясняет разнообразие растений, грибов, лишайников и мохообразных в различных средах обитания и на больших географических территориях». bioRxiv 10.1101/509794 .
- ^ Саймонсон, Уильям Д.; Аллен, Харриет Д.; Кумс, Дэвид А. (5 июля 2014 г.). «Применение воздушного лидара для оценки видового разнообразия животных» . Методы экологии и эволюции . 5 (8): 719–729. Бибкод : 2014MEcEv...5..719S . дои : 10.1111/2041-210x.12219 . ISSN 2041-210X .
- ^ Во, Феликс; Фрейзер, Керидвен И.; Кроу, Дэйв; Прочтите, Стивен; Уотерс, Джонатан М. (2023). «Интеграция геномного анализа водорослей и геологических данных для выявления последствий древнего землетрясения» . Журнал интерфейса Королевского общества . 20 (202). дои : 10.1098/rsif.2023.0105 . ПМЦ 10189309 . ПМИД 37194268 .
- ^ Jump up to: а б Чжао, Кайгуан; Суарес, Хуан С; Гарсия, Мариано; Ху, Тунси; Ван, Ченг; Лондо, Алексис (2018). «Полезность многовременного лидара для мониторинга лесов и углерода: рост деревьев, динамика биомассы и поток углерода» . Дистанционное зондирование окружающей среды . 204 : 883–897. Бибкод : 2018RSEnv.204..883Z . дои : 10.1016/j.rse.2017.09.007 .
- ^ Вулдер, Майкл А; Батер, Кристофер В.; Купс, Николас С; Хилкер, Томас; Уайт, Джоан С. (2008). «Роль LiDAR в устойчивом управлении лесами». Лесная хроника . 84 (6): 807–826. CiteSeerX 10.1.1.728.1314 . дои : 10.5558/tfc84807-6 . ISSN 0015-7546 .
- ^ «ПОЖАРЫ 2020 | ВДВ» . Архивировано из оригинала 13 июня 2020 г. Проверено 10 февраля 2020 г.
- ^ Конеса-Гарсия, Кармело; Пуч-Менгуаль, Карлос; Рикельме, Адриан; Томас, Роберто; Мартинес-Капель, Франциско; Гарсиа-Лоренцо, Рафаэль; Пастор Хосе Л.; Перес-Кутильяс, Педро; Мартинес-Сальвадор, Альберто; Кано-Гонсалес, Мигель (февраль 2022 г.). «Изменения в мощности потока и морфологические изменения в масштабе события и с высоким пространственным разрешением вдоль эфемерного канала с гравийным слоем» . Геоморфология . 398 : 108053. Бибкод : 2022Geomo.39808053C . дои : 10.1016/j.geomorph.2021.108053 . HDL : 10251/190056 . ISSN 0169-555X .
- ^ Яновский, Лукаш; Тильманн, Кароль; Тшчинска, Каролина; Рудовский, Станислав; Теговский, Ярослав (2021). «Исследование ледниковых форм рельефа с помощью объектно-ориентированного анализа изображений и спектральных параметров цифровой модели рельефа» . Транзакции IEEE по геонаукам и дистанционному зондированию . 60 : 1–17. дои : 10.1109/TGRS.2021.3091771 .
- ^ Томас, Р.; Абеллан, А.; Кано, М.; Рикельме, А.; Тенза-Абриль, AJ; Баеза-Бротонс, Ф.; Саваль, Дж. М.; Джабоедофф, М. (01 февраля 2018 г.). «Многодисциплинарный подход к исследованию горной породы, распространяющейся на городском склоне» . Оползни . 15 (2): 199–217. Бибкод : 2018Земли..15..199Т . дои : 10.1007/s10346-017-0865-0 . ISSN 1612-5118 .
- ^ Тонини, Мардж; Абеллан, Антонио (30 июня 2014 г.). «Обнаружение камнепадов по наземным облакам точек LiDAR: подход к кластеризации с использованием R» . Журнал пространственной информатики (8): 95–110. дои : 10.5311/josis.2014.8.123 . ISSN 1948-660X .
- ^ Ху, Люру; Наварро-Эрнандес, Мария И.; Лю, Сяоцзе; Томас, Роберт; Тан, Синьмин; Брю, Гваделупа; Эскерро, Пол; Чжан, Циндао (октябрь 2022 г.). «Анализ регионального оседания земель с большим градиентом в бассейне Верхнего Гуадалентина (Испания) с использованием наборов данных аэрофотосъемки LiDAR с открытым доступом» . Дистанционное зондирование окружающей среды . 280 : Бибкод : 2022RSEnv.28013218H 113218. дои : 10.1016/j.rse.2022.113218 . hdl : 10045/126163 . ISSN 0034-4257 .
- ^ Хьюз, МВт; Куигли, MC; ван Баллегой, С.; Дим, БЛ; Брэдли, бакалавр; Харт, Делавэр (2015). «Тонущий город: землетрясения увеличивают опасность наводнений в Крайстчерче, Новая Зеландия» . ГСА сегодня . 25 (3): 4–10. дои : 10.1130/Геология . Проверено 22 февраля 2016 г.
- ^ Рабатель, Антуан; Делин, Филип; Жайе, Стефан; Раванель, Людовик (28 мая 2008 г.). «Камнепады в высокогорных скальных стенах, количественно оцененные с помощью наземных лидарных измерений: пример исследования в районе Монблана». Письма о геофизических исследованиях . 35 (10): L10502. Бибкод : 2008GeoRL..3510502R . дои : 10.1029/2008GL033424 . S2CID 52085197 .
- ^ Каннингем, Диксон; Гребби, Стивен; Тэнси, Кевин; Госар, Андрей; Кастелич, Ваня (2006). «Применение бортового LiDAR для картирования сейсмогенных разломов в лесистой горной местности, юго-восточные Альпы, Словения» (PDF) . Письма о геофизических исследованиях . 33 (20): L20308. Бибкод : 2006GeoRL..3320308C . дои : 10.1029/2006GL027014 . ISSN 1944-8007 . Архивировано (PDF) из оригинала 9 октября 2022 г.
- ^ «ЛИДАР показывает, где риск землетрясений самый высокий» . Сиэтлпи.com . 17 апреля 2001 г. Проверено 22 февраля 2016 г.
- ^ «Данные лидара горы Сент-Хеленс», Архив геопространственных данных штата Вашингтон (13 сентября 2006 г.) . Проверено 8 августа 2007 г.
- ^ «Воздушный топографический картограф», NASA.gov . Проверено 8 августа 2007 г.
- ^ Ли, Т. (2011). «Тенденция температуры в средней атмосфере и солнечный цикл, выявленные в результате долгосрочных наблюдений с помощью лидара Рэлея» (PDF) . Журнал геофизических исследований . 116 : Д00П05. Бибкод : 2011JGRD..116.0P05L . дои : 10.1029/2010jd015275 .
- ^ Томас Д. Вилкерсон, Гири К. Швеммер и Брюс М. Джентри. LIDAR-профилирование аэрозолей, облаков и ветров с помощью доплеровских и недоплеровских методов , Международный проект H2O НАСА (2002) . Архивировано 22 августа 2007 г. в Wayback Machine .
- ^ «Исследователи Земли: ADM-Aeolus», ESA.org (Европейское космическое агентство, 6 июня 2007 г.) . Проверено 8 августа 2007 г.
- ^ «Допплеровский лидар дает преимущество морякам-олимпийцам», Optics.org (3 июля 2008 г.) . Проверено 8 июля 2008 г.
- ^ Клайв, П.Дж.М., Появление эоликов , TEDx Университет Стратклайда (2014). Проверено 9 мая 2014 г.
- ^ Jump up to: а б Кох, Грейди Дж.; Барнс, Брюс В.; Петрос, Мулугета; Бейон, Джеффри Ю; Амзаджердян, Фарзин; Ю, Джиронг; Дэвис, Ричард Э; Исмаил, Сайед; Вэй, Стефани; Кавайя, Майкл Дж; Сингх, Упендра Н. (2004). «Лидарные измерения CO2 с помощью когерентного дифференциального поглощения». Прикладная оптика . 43 (26): 5092–5099. Бибкод : 2004ApOpt..43.5092K . дои : 10.1364/AO.43.005092 . ПМИД 15468711 .
- ^ Jump up to: а б Абшир, Джеймс Б.; Раманатан, Ананд; Ририс, Харис; Мао, Цзяньпин; Аллан, Грэм Р.; Хассельбрак, Уильям Э.; Уивер, Кларк Дж.; Броуэлл, Эдвард В. (30 декабря 2013 г.). «Аэромобильные измерения концентрации и дальности действия столба CO2 с использованием импульсного лидара IPDA прямого обнаружения» . Дистанционное зондирование . 6 (1): 443–469. Бибкод : 2013RemS....6..443A . дои : 10.3390/rs6010443 . hdl : 2060/20150008257 .
- ^ Jump up to: а б Кэмпбелл, Джоэл Ф. (2013). «Техника нелинейной качания частоты для измерений CO2 с использованием лазерной системы непрерывного действия». Прикладная оптика . 52 (13): 3100–3107. arXiv : 1303.4933 . Бибкод : 2013ApOpt..52.3100C . дои : 10.1364/AO.52.003100 . ПМИД 23669780 . S2CID 45261286 .
- ^ Доблер, Джереми Т.; Харрисон, Ф. Уоллес; Броуэлл, Эдвард В.; Лин, Бинг; МакГрегор, Дуг; Кои, Сьюзен; Чхве, Ёнхун; Исмаил, Сайед (2013). «Измерения столба CO2 в атмосфере с помощью воздушного лидара непрерывного волоконного лазера с модуляцией интенсивности волны 1,57 мкм». Прикладная оптика . 52 (12): 2874–2892. Бибкод : 2013ApOpt..52.2874D . дои : 10.1364/AO.52.002874 . ПМИД 23669700 . S2CID 13713360 .
- ^ Ририс, Харис; Нумата, Кенджи; Ли, Стив; Ву, Стюарт; Раманатан, Ананд; Доуси, Марта; Мао, Цзяньпин; Кава, Рэндольф; Абшир, Джеймс Б. (1 декабря 2012 г.). «Аэромобильные измерения содержания столба метана в атмосфере с использованием импульсного лидара дифференциального поглощения с интегральным трактом». Прикладная оптика . 51 (34): 8296–305. Бибкод : 2012ApOpt..51.8296R . дои : 10.1364/AO.51.008296 . ISSN 1539-4522 . ПМИД 23207402 . S2CID 207299203 .
- ^ Грант, ВБ, Лидар для исследований атмосферы и гидросферы, в журнале Tunable Laser Applications , 1-е издание, Дуарте, FJ Ed. (Марсель Деккер, Нью-Йорк, 1995) Глава 7.
- ^ Гонглах, Мэтт. «Как работают полицейские лазерные пистолеты» .
- ^ «Криминалистика | FARO Technologies» .
- ^ «Арете» . Архивировано из оригинала 4 сентября 2011 года.
- ^ «Лазерное дистанционное обнаружение биологических агентов НАТО» . Rta.nato.int. Архивировано из оригинала 20 июля 2011 г. Проверено 6 мая 2013 г.
- ^ «Датчик обнаружения биоаэрозольной угрозы ближнего действия (SR-BioSpectra)» . Ино.ca. Проверено 6 мая 2013 г.
- ^ «Разведка и анализ в области обороны и безопасности: IHS Jane's | IHS» . Статьи.janes.com . Проверено 22 февраля 2016 г.
- ^ Спайс, Байрон. Исследователи помогают разработать полноразмерный автономный вертолет. Архивировано 8 июня 2011 г. в Wayback Machine Carnegie Mellon , 6 июля 2010 г. Проверено: 19 июля 2010 г.
- ^ Коски, Оливия. Впервые полноразмерный робот-вертолет летает без помощи человека , проводное соединение , 14 июля 2010 г. Дата обращения: 19 июля 2010 г.
- ^ «Измерение объема» . 3dlasermapping.com. Архивировано из оригинала 4 апреля 2014 г. Проверено 17 февраля 2014 г.
- ^ Модульные горные системы # Автономные системы транспортировки
- ^ Jump up to: а б Харгитай, Хенрик; Виллнер, Конрад; Бухройтнер, Манфред (2019), Харгитай, Хенрик (редактор), «Методы планетарного топографического картографирования: обзор», Планетарная картография и ГИС , Конспекты лекций по геоинформации и картографии, Springer International Publishing, стр. 147–174, doi : 10.1007/978-3-319-62849-3_6 , ISBN 978-3-319-62849-3 , S2CID 133855780
- ^ НАСА. «Марсианский модуль НАСА видит падающий снег, данные о почве указывают на жидкое прошлое» NASA.gov (29 сентября 2008 г.), Архивировано 27 июля 2012 г. на Wayback Machine . Проверено 9 ноября 2008 г.
- ^ «Облачно-аэрозольный лидар с ортогональной поляризацией (CALIOP)» . НАСА . Проверено 16 августа 2015 г.
- ^ К.В. Гауэрс. «В центре внимания: диагностика лидар-томсоновского рассеяния на JET» JET.EFDA.org (без даты) . Проверено 8 августа 2007 года. Архивировано 18 сентября 2007 года в Wayback Machine.
- ^ Рикельме, Эй Джей; Абеллан, А.; Томас, Р.; Джабоедофф, М. (2014). «Новый подход к полуавтоматическому распознаванию трещин массива горных пород по трехмерным облакам точек» (PDF) . Компьютеры и геонауки . 68 : 38–52. Бибкод : 2014CG.....68...38R . дои : 10.1016/j.cageo.2014.03.014 . hdl : 10045/36557 .
- ^ Джильи, Г.; Касальи, Н. (2011). «Полуавтоматическое извлечение структурных данных горного массива из облаков точек LIDAR высокого разрешения». Международный журнал механики горных пород и горных наук . 48 (2): 187–198. Бибкод : 2011IJRMM..48..187G . дои : 10.1016/j.ijrmms.2010.11.009 .
- ^ Jump up to: а б с Слоб, С. 2010. Автоматизированная характеристика горной массы с использованием 3D наземного лазерного сканера, Технический университет Делфа.
- ^ Рикельме, Эй Джей; Абеллан, А.; Томас, Р. (2015). «Анализ расстояния между разрывами в массивах горных пород с использованием трехмерных облаков точек». Инженерная геология . 195 : 185–195. Бибкод : 2015EngGe.195..185R . дои : 10.1016/j.enggeo.2015.06.009 . hdl : 10045/47912 .
- ^ Jump up to: а б с Штурценеггер, М.; Стед, Д. (2009). «Наземная цифровая фотограмметрия с близкого расстояния и наземное лазерное сканирование для определения характеристик неоднородностей горных пород». Инженерная геология . 106 (3–4): 163–182. Бибкод : 2009EngGe.106..163S . дои : 10.1016/j.enggeo.2009.03.004 .
- ^ Рикельме, Адриан; Томас, Роберт; Кано, Майкл; Пастор Джозеф Луис; Абеллан, Антонио (24 мая 2018 г.). «Автоматическое картирование устойчивости разрывов горных пород с использованием трехмерных облаков точек» (PDF) . Механика горных пород и горная инженерия . 51 (10): 3005–3028. Бибкод : 2018RMRE...51.3005R . дои : 10.1007/s00603-018-1519-9 . ISSN 0723-2632 . S2CID 135109573 . Архивировано (PDF) из оригинала 0 октября 2022 г.
- ^ Рикельме, Адриан Х.; Томас, Роберто; Абеллан, Антонио (01 апреля 2016 г.). «Характеристика скальных склонов с помощью оценки массы склона с использованием трехмерных облаков точек». Международный журнал механики горных пород и горных наук . 84 : 165–176. Бибкод : 2016IJRMM..84..165R . дои : 10.1016/j.ijrmms.2015.12.008 . hdl : 10045/52313 .
- ^ Абеллан, А.; Оппикофер, Т.; Джабоедов, М.; Россер, Нью-Джерси; Лим, М.; Лато, MJ (2014). «Наземное лазерное сканирование нестабильностей горных склонов» . Процессы на поверхности Земли и формы рельефа . 39 (1): 80–97. Бибкод : 2014ESPL...39...80A . дои : 10.1002/особенно 3493 . S2CID 128876331 .
- ^ Абеллан, А.; Вилаплана, Дж. М.; Мартинес, Дж. (2006). «Применение наземного лазерного сканера дальнего действия для детального исследования камнепадов в Валь-де-Нурия (Восточные Пиренеи, Испания)». Инженерная геология . 88 (3–4): 136–148. Бибкод : 2006EngGe..88..136A . дои : 10.1016/j.enggeo.2006.09.012 .
- ^ Томас, Р.; Абеллан, А.; Кано, М.; Рикельме, А.; Тенза-Абриль, AJ; Баеза-Бротонс, Ф.; Саваль, Дж. М.; Джабоедофф, М. (01 августа 2017 г.). «Многодисциплинарный подход к исследованию горной породы, распространяющейся на городском склоне» . Оползни . 15 (2): 199–217. Бибкод : 2018Земли..15..199Т . дои : 10.1007/s10346-017-0865-0 . hdl : 10045/73318 . ISSN 1612-510X .
- ^ «Лидар | Программа НАСА по воздушно-десантным наукам» . airbornescience.nasa.gov . Проверено 20 марта 2017 г.
- ^ «ИфТАС » Iftas.de Проверено 6 мая 2013 г.
- ^ «Имитационные модели лидара в Webots» . Проверено 4 июня 2018 г.
- ^ «НАСА - Эксперимент по космическим технологиям лидара (LITE)» . НАСА.gov. 25 августа 2011 г. Проверено 6 мая 2013 г.
- ^ ДМ Винкер; Р.Х. Диван; Депутат Маккормик (27 сентября 2011 г.). «Обзор LITE: эксперимент НАСА по космическим технологиям лидара». Труды IEEE . 84 (2): 164–180. дои : 10.1109/5.482227 .
- ^ Брюс Банердт, Орбитальный лазерный высотомер , Марсианские хроники, Том 1 , № 3, NASA.gov. Проверено 11 марта 2019 г.
- ^ НАСА, ЛОЛА . Проверено 11 марта 2019 г.
- ^ Джон Ф. Кавано и др., « Меркурийный лазерный высотомер для миссии MESSENGER », Space Sci Rev , doi : 10.1007/s11214-007-9273-4 , 24 августа 2007 г. Проверено 11 марта 2019 г.
- ^ Шулвик, Якуб; Бурдзяковский, Павел; Яновский, Артур; Пржиборски, Марек; Тысяц, Пол; Войтович, Александр; Холодков Артем; Матысик, Кшиштоф; Матысик, Мацей (2015). «Морское лазерное сканирование как источник пространственных данных» . Польские морские исследования . 22 (4): 9–14. Бибкод : 2015PMRes..22d...9S . дои : 10.1515/pomr-2015-0064 .
- ^ «Батиметрический лидар» . home.iitk.ac.in. Проверено 17 января 2018 г.
- ^ «CivilMaps.com ускоряет обследование состояния дорог и тротуаров» . Гражданские карты. 15 марта 2015 г. Архивировано из оригинала 02 апреля 2015 г. Проверено 15 марта 2015 г.
- ^ «Бамперные лазеры» . Sciencedaily.com. 27 февраля 2007 г. Проверено 6 мая 2013 г.
- ^ Министерство торговли США (14 ноября 2008 г.). «План внедрения Автоматизированной системы приземных наблюдений (АСОС)» (PDF) . погода.gov . Архивировано (PDF) из оригинала 9 октября 2022 г.
- ^ Клайв, П.Дж.М., Windpower 2.0: технологии принимают вызов. Архивировано 13 мая 2014 г. в сети Wayback Machine Environmental Research Web, 2008. Проверено: 9 мая 2014 г.
- ^ Миккельсен, Торбен; и др. (октябрь 2007 г.). «Эксперимент с рогами мощностью 12 МВт» (PDF) . Рисоэ. Архивировано из оригинала (PDF) 3 июля 2011 г. Проверено 25 апреля 2010 г.
- ^ «Жмурясь от ветра» . Экономист . 04.03.2010 . Проверено 25 апреля 2010 г.
- ^ «Первое в мире управление ветряной турбиной с помощью лидарной системы на основе гондолы» . Университет корпоративных коммуникаций Штутгарта . 05.06.2012 . Проверено 12 апреля 2014 г.
- ^ Эндрю К. Шолброк и др. Полевые испытания средств управления прямой связью на основе лидара на базе данных Национальной лаборатории возобновляемых источников энергии передовых исследовательских турбин NREL Controls , 12 апреля 2014 г. Дата обращения: 12 апреля 2014 г.
- ^ Миккельсен, Торбен и Хансен, Каспер Хьорт и др. Измерения скорости ветра с помощью лидара с помощью вращающегося вращающегося вращающегося устройства. База данных датских исследований и Датский технический университет , 20 апреля 2010 г. Дата обращения: 25 апреля 2010 г.
- ^ Асимакопулус М., Клайв П.Дж.М., Мор Г. и Боддингтон Р., Измерение и визуализация морских зон сжатия. Архивировано 12 мая 2014 г. на Wayback Machine ежегодной конференции Европейской ассоциации ветроэнергетики , 2014. Проверено: 9 мая. 2014.
- ^ Галлахер Д. и Мор Г., Лидарные измерения и визуализация турбулентности и длины затухания следа. Архивировано 12 мая 2014 г. на Wayback Machine , 2014 г. Проверено: 9 мая 2014 г. ежегодной конференции Европейской ассоциации ветроэнергетики
- ^ Клайв, П.Дж.М. и др., Испытания кривой мощности на море для определения затрат на суше: практический пример. Архивировано 12 мая 2014 г. на Wayback Machine , 2014. Проверено: 9 мая 2014 г. ежегодной конференции Европейской ассоциации ветроэнергетики
- ^ Клайв, П.Дж.М., Оценка эффективности морской энергетики для затрат на суше. Архивировано 17 апреля 2014 г. в Wayback Machine DEWEK (Deutsche Windenergie Konferenz), 2012. Проверено: 9 мая 2014 г.
- ^ Лукач, Нико; Штумбергер Горазд; Жалик Борут (2017). «Оценка ветровых ресурсов с использованием данных бортового LiDAR и гидродинамики сглаженных частиц». Экологическое моделирование и программное обеспечение . 95 : 1–12. Бибкод : 2017EnvMS..95....1L . дои : 10.1016/j.envsoft.2017.05.006 .
- ^ Йохем, Андреас; Хёфле Бернхард; Рутцингер Мартин; Пфайфер Норберт (2009). «Автоматическое обнаружение и анализ плоскости крыши в облаках точек воздушного лидара для оценки солнечного потенциала» . Датчики . 9 (7): 5241–5262. Бибкод : 2009Senso...9.5241J . дои : 10.3390/s90705241 . ПМК 3274168 . ПМИД 22346695 .
- ^ Нгуен, Ха Т.; Пирс, Джошуа М.; Харрап, Роб; Барбер, Джеральд (2012). «Применение LiDAR для оценки потенциала развертывания солнечных фотоэлектрических систем на крыше муниципального района» . Датчики . 12 (4): 4534–4558. Бибкод : 2012Senso..12.4534N . дои : 10.3390/s120404534 . ПМЦ 3355426 . ПМИД 22666044 .
- ^ Нгуен, Ха Т.; Пирс, Джошуа М. (2012). «Учет потерь затенения при оценке солнечного фотоэлектрического потенциала в муниципальном масштабе» . Солнечная энергия . 86 (5): 1245–1260. Бибкод : 2012SoEn...86.1245N . doi : 10.1016/j.solener.2012.01.017 . S2CID 15435496 .
- ^ Йохем, Андреас; Хёфле Бернхард; Рутцингер Мартин (2011). «Извлечение вертикальных стен из данных мобильного лазерного сканирования для оценки солнечного потенциала» . Дистанционное зондирование . 3 (4): 650–667. Бибкод : 2011RemS....3..650J . дои : 10.3390/rs3030650 .
- ^ Лукач, Нико; Жлаус Даниэль; Семе Семе; Жалик Борут; Штумбергер Горазд (2013). «Оценка поверхностей крыш с точки зрения их солнечного потенциала и пригодности для фотоэлектрических систем на основе данных LiDAR». Прикладная энергетика . 102 : 803–812. Бибкод : 2013ApEn..102..803L . дои : 10.1016/j.apenergy.2012.08.042 .
- ^ «rFactor Pro — лазерное сканирование рая» . VirtualR.net — 100% независимые новости о симуляторах гонок . 15 июля 2011 г. Проверено 4 июня 2020 г.
- ^ Марш, Уильям (30 июня 2017 г.). «rFactor Pro демонстрирует результаты сканирования Хунгароринга с помощью лидара» . Sim Racing Паддок . Проверено 4 июня 2020 г.
- ^ «Новые трассы в Project CARS 2 были отсканированы лазером с помощью дронов» . ГТПланет . 08 февраля 2017 г. Проверено 4 июня 2020 г.
- ^ Ник Пэриш (13 июля 2008 г.). «От OK Computer к Roll Computer: Radiohead и режиссер Джеймс Фрост снимают видео без камер» . Креативность. Архивировано из оригинала 17 июля 2008 г.
- ^ «LiDAR против 3D ToF-датчиков – как Apple улучшает дополненную реальность для смартфонов» . 31 марта 2020 г. Проверено 03 апреля 2020 г.
- ^ «Apple запускает линейку iPhone 12 Pro с новым дизайном, улучшенными камерами и LiDAR» . 13 октября 2020 г. Проверено 14 октября 2020 г.
- ^ Холмс, Мартин (13 сентября 2022 г.). « Новая доска-головоломка «Колесо фортуны» вызвала неоднозначную реакцию фанатов – TV Insider» .
- ^ Ван, Ян; Чао, Вэй-Лунь; Гарг, Дивьянш; Харихаран, Бхарат; Кэмпбелл, Марк; Вайнбергер, Килиан К. (22 февраля 2020 г.). «Псевдо-LiDAR на основе визуальной оценки глубины: устранение разрыва в обнаружении 3D-объектов для автономного вождения». arXiv : 1812.07179 [ cs.CV ].
Дальнейшее чтение
[ редактировать ]- Гил, Эмилио; Льоренс, Джордж; Лоп, Джордж; Фабрегас, Ксавье; Галларт, Монтсеррат (2013). «Использование наземного лидарного датчика для обнаружения сноса при опрыскивании виноградников» . Датчики . 13 (1): 516–534. Бибкод : 2013Senso..13..516G . дои : 10.3390/s130100516 . ПМЦ 3574688 . ПМИД 23282583 .
- Наследие, Э. (2011). 3D-лазерное сканирование наследия. Консультации и рекомендации для пользователей по лазерному сканированию в археологии и архитектуре. Доступно на сайте www.english-heritage.org.uk. 3D-лазерное сканирование наследия | Историческая Англия .
- Наследие Г. и Лардж А. (ред.). (2009). Лазерное сканирование для наук об окружающей среде. Джон Уайли и сыновья. ISBN 1-4051-5717-8 .
- Мальтамо М., Нэссет Э. и Воуконен Дж. (2014). Применение воздушного лазерного сканирования в лесном хозяйстве: концепции и практические примеры (том 27). Springer Science & Business Media. ISBN 94-017-8662-3 .
- Шан Дж. и Тот С.К. (ред.). (2008). Топографическая лазерная локация и сканирование: принципы и обработка. ЦРК Пресс. ISBN 1-4200-5142-3 .
- Воссельман Г. и Маас Х.Г. (ред.). (2010). Воздушное и наземное лазерное сканирование. Издательство Уиттлс. ISBN 1-4398-2798-2 .
Внешние ссылки
[ редактировать ]- Национальное управление океанических и атмосферных исследований (НОАА) (15 апреля 2020 г.). «Что такое ЛИДАР?» . Национальная океаническая служба НОАА .
- Центр координации и знаний лидарной информации Геологической службы США (CLICK) - веб-сайт, предназначенный для «облегчения доступа к данным, координации пользователей и обучения использованию лидарного дистанционного зондирования для научных нужд».