Пеленгация
Эта статья нуждается в дополнительных цитатах для проверки . ( октябрь 2023 г. ) |


Пеленгация ( DF ) или радиопеленгация ( RDF ) — это использование радиоволн для определения направления на радиоисточник. Источником может быть сотрудничающий радиопередатчик или непреднамеренный источник, естественный радиоисточник или незаконная или вражеская система. Радиопеленгация отличается от радиолокации тем, что каким-либо одним приемником определяется только направление; радиолокационная система обычно также определяет расстояние до интересующего объекта, а также направление. С помощью триангуляции местоположение радиоисточника можно определить путем измерения его направления из двух или более мест. Радиопеленгация используется в радионавигации кораблей и самолетов, для обнаружения аварийных передатчиков для поиска и спасения , для отслеживания дикой природы, а также для обнаружения незаконных или мешающих передатчиков. Во время Второй мировой войны радиопеленгация использовалась обеими сторонами для обнаружения и наведения самолетов, надводных кораблей и подводных лодок.
Системы RDF можно использовать с любым источником радиосигнала, хотя очень длинные волны (низкие частоты) требуют очень больших антенн и обычно используются только в наземных системах. Тем не менее эти длины волн используются для морской радионавигации, поскольку они могут преодолевать очень большие расстояния «за горизонтом», что ценно для кораблей, когда прямая видимость может составлять всего несколько десятков километров. Для использования в воздухе, где горизонт может простираться на сотни километров, можно использовать более высокие частоты, что позволяет использовать антенны гораздо меньшего размера. Автоматический пеленгатор , который можно было настроить на радиомаяки, называемые ненаправленными маяками или коммерческими AM- радиовещателями, в 20 веке был особенностью большинства самолетов, но постепенно выводится из употребления. [1]
Для военных RDF является ключевым инструментом радиоразведки . Способность определять местоположение вражеского передатчика имела неоценимое значение со времен Первой мировой войны и сыграла ключевую роль в битве за Атлантику во время Второй мировой войны . По оценкам, передовые британские системы « хафф-дафф » были прямо или косвенно ответственны за 24% всех подводных лодок, потопленных во время войны. В современных системах часто используются антенны с фазированной решеткой, обеспечивающие быстрое формирование луча для получения высокоточных результатов, и они являются частью более крупного комплекса средств радиоэлектронной борьбы .
В первых радиопеленгаторах использовались механически вращающиеся антенны, которые сравнивали мощность сигнала, а затем последовало несколько электронных версий той же концепции. Современные системы используют сравнение фазовых или доплеровских методов , которые, как правило, проще автоматизировать. Ранние британские радары назывались RDF, что часто называют обманом. Фактически, системы Chain Home использовали большие приемники RDF для определения направления. Более поздние радиолокационные системы обычно использовали одну антенну для трансляции и приема и определяли направление по направлению, в котором была обращена антенна. [2]
История
[ редактировать ]Ранние механические системы
[ редактировать ]
Самые ранние эксперименты с RDF были проведены в 1888 году, когда Генрих Герц обнаружил направленность разомкнутой проволочной петли, используемой в качестве антенны. Когда антенна была направлена на сигнал, она давала максимальное усиление и нулевой сигнал, когда она была направлена лицом. Это означало, что всегда существовала неопределенность в местоположении сигнала: выходной сигнал был бы одинаковым, если бы сигнал находился перед или позади антенны. Более поздние экспериментаторы также использовали дипольные антенны , которые работали в противоположном направлении, достигая максимального усиления под прямым углом и нуля при выравнивании. Системы RDF, использующие рамочные или дипольные антенны с механическим поворотом, были обычным явлением на рубеже 20-го века. Выдающиеся примеры были запатентованы Джоном Стоуном Стоуном в 1902 году (патент США 716 134) и Ли де Форестом в 1904 году (патент США 771 819), а также многими другими примерами.
К началу 1900-х годов многие экспериментаторы искали способы использовать эту концепцию для определения местоположения передатчика. Ранние радиосистемы обычно использовали средневолновые и длинноволновые сигналы. В частности, длинные волны имели хорошие характеристики передачи на большие расстояния из-за их ограниченного взаимодействия с землей и, таким образом, обеспечивали превосходное по маршруту большого круга распространение наземных волн , которые были направлены непосредственно на передатчик. Методы выполнения RDF на длинноволновых сигналах были основной областью исследований в 1900-х и 1910-х годах. [3]
Антенны обычно чувствительны к сигналам только в том случае, если их длина составляет значительную часть длины волны или больше. Большинство антенн по крайней мере 1 ⁄ длины волны, чаще 1 ⁄ 2 – полуволновой диполь – очень распространенная конструкция. Для использования на длинных волнах это приводило к использованию рамочных антенн длиной в десятки футов по сторонам, часто с более чем одной петлей, соединенных вместе для улучшения сигнала. Другое решение этой проблемы было разработано компанией Маркони в 1905 году. Оно состояло из ряда горизонтальных проволок или стержней, расположенных так, чтобы они были направлены наружу из общей центральной точки. Подвижный переключатель мог соединить противоположные пары этих проводов, образуя диполь, и, вращая переключатель, оператор мог искать самый сильный сигнал. [4] ВМС США в некоторой степени преодолели эту проблему, установив антенны на кораблях и плавая по кругу. [5] Такие системы были громоздкими и непрактичными для многих целей. [6]
Беллини-Този
[ редактировать ]
Ключевое усовершенствование концепции RDF было представлено Этторе Беллини и Алессандро Този в 1909 году (патент США № 943960). В их системе использовались две такие антенны, обычно треугольные петли, расположенные под прямым углом. Сигналы от антенн передавались в катушки, обернутые вокруг деревянной рамы размером с консервную банку , где сигналы воссоздавались в области между катушками. Отдельную рамочную антенну, расположенную в этой области, можно было бы затем использовать для определения направления, не перемещая основные антенны. Это сделало RDF настолько более практичным, что вскоре его начали широко использовать для навигации, часто как первую доступную форму воздушной навигации, когда наземные станции наводились на радиостанцию самолета. Пеленгаторы Беллини-Този получили широкое распространение с 1920-х по 1950-е годы.
Ранние системы RDF были полезны в основном для длинноволновых сигналов. Эти сигналы способны передаваться на очень большие расстояния, что делает их полезными для дальней навигации. Однако когда тот же метод был применен к более высоким частотам, возникли неожиданные трудности из-за отражения высокочастотных сигналов от ионосферы . Станция RDF теперь могла получать один и тот же сигнал из двух или более мест, особенно в течение дня, что вызывало серьезные проблемы с определением местоположения. Это привело к появлению в 1919 году антенны Адкока (патент Великобритании 130 490), которая состояла из четырех отдельных монопольных антенн вместо двух рамок, устраняя горизонтальные компоненты и, таким образом, отфильтровывая небесные волны , отраженные от ионосферы. Антенны Адкока широко использовались с детекторами Беллини – Този с 1920-х годов.
В 1931 году авиакорпус армии США испытал примитивный радиокомпас, который использовал в качестве маяка коммерческие станции. [7]
Хафф-дафф
[ редактировать ]
Значительное усовершенствование техники RDF было введено Робертом Уотсоном-Ваттом в рамках его экспериментов по обнаружению ударов молний как метода указания направления грозы для моряков и летчиков. Он долгое время работал с обычными системами RDF, но их было трудно использовать из-за мимолетных сигналов молний. Вначале он предложил использовать осциллограф для почти мгновенного отображения этих данных, но не смог найти его во время работы в Метеорологическом бюро . Когда офис переехал, его новое место на радиоисследовательской станции предоставило ему как антенну Адкока , так и подходящий осциллограф, и он представил свою новую систему в 1926 году.
Несмотря на то, что система представлена публично, а ее измерения широко освещаются в Великобритании, ее влияние на искусство RDF кажется странным образом сдержанным. Разработка была ограничена до середины 1930-х годов, когда различные британские войска начали широкомасштабную разработку и внедрение этих « высокочастотных пеленгаторных систем», или «хафф-дафф». Чтобы избежать RDF, немцы разработали метод передачи коротких сообщений продолжительностью менее 30 секунд, что меньше 60 секунд, которые потребуются обученному оператору Беллини-Този для определения направления. Однако это было бесполезно против систем типа «хафф-дафф», которые обнаруживали сигнал с достаточной точностью за считанные секунды. Немцы осознали эту проблему только в середине войны и не предпринимали никаких серьезных шагов для ее решения до 1944 года. К тому времени хафф-дафф помог примерно в четверти всех успешных атак на У-1. лодочный флот.
Послевоенные системы
[ редактировать ]Некоторые разработки в области электроники во время и после Второй мировой войны привели к значительному улучшению методов сравнения фазы сигналов. Кроме того, система фазовой автоподстройки частоты (ФАПЧ) позволяла легко настраивать сигналы, которые не дрейфовали. Усовершенствованные электронные лампы и внедрение транзистора позволили экономично использовать гораздо более высокие частоты, что привело к широкому использованию сигналов ОВЧ и УВЧ. Все эти изменения привели к появлению новых методов RDF и их гораздо более широкому использованию.
В частности, возможность сравнивать фазы сигналов привела к созданию метода RDF фазового сравнения, который сегодня, пожалуй, является наиболее широко используемым методом. В этой системе рамочная антенна заменена одним ферритовым сердечником квадратной формы с петлями, намотанными вокруг двух перпендикулярных сторон. Сигналы из контуров подаются в схему сравнения фаз, выходная фаза которой напрямую указывает направление сигнала. Отправив его на любой способ отображения и заблокировав сигнал с помощью ФАПЧ, можно непрерывно отображать направление на вещательную станцию. Работа состоит исключительно из настройки станции и настолько автоматизирована, что эти системы обычно называют автоматическими пеленгаторами .
Были разработаны другие системы, требующие большей точности. В системах псевдодоплеровского радиопеленгатора используется ряд небольших дипольных антенн, расположенных кольцом, и используется электронное переключение для быстрого выбора диполей для подачи в приемник. Результирующий сигнал обрабатывается и генерирует звуковой тон. Фаза этого звукового тона по сравнению с вращением антенны зависит от направления сигнала. Доплеровские системы RDF широко заменили систему «хафф-дафф» для обнаружения мимолетных сигналов.
21 век
[ редактировать ]Различные процедуры радиопеленгации для определения положения на море больше не являются частью системы морской безопасности ГМССБ , действующей с 1999 года. Поразительную поперечную рамочную антенну с прикрепленной к ней вспомогательной антенной можно встретить лишь на сигнальных мачтах некоторых судов. более старые корабли, потому что они там не мешают и демонтаж обошелся бы слишком дорого.
Современные методы позиционирования, такие как GPS, DGPS, радар и устаревший Loran C, имеют методы радиопеленгации, которые неточно соответствуют сегодняшним потребностям.
Сети радиопеленгации также больше не существуют. [8] Однако спасательные суда, такие как спасательные шлюпки RNLI в Великобритании и поисково-спасательные вертолеты, имеют приемники пеленгации морских УКВ-сигналов и сигналов самонаведения 121,5 МГц, встроенные в радиобуи EPIRB и PLB, хотя современные маяки GPS-EPIRBS и AIS постепенно создают их. избыточный.
Оборудование
[ редактировать ]
Радиопеленгатор ) — это ( RDF устройство для определения направления или пеленга на источник радиосигнала . Процесс измерения направления известен как радиопеленгация или иногда просто пеленгация ( DF ). Используя два или более измерений из разных мест, можно определить местоположение неизвестного передатчика; альтернативно, используя два или более измерений известных передатчиков, можно определить местоположение транспортного средства. RDF широко используется в качестве радионавигационной системы, особенно на лодках и самолетах.
Системы RDF можно использовать с любым источником радиосигнала, хотя размер приемных антенн зависит от длины волны сигнала; очень длинные волны (низкие частоты) требуют очень больших антенн и обычно используются только в наземных системах. Тем не менее, эти длины волн очень полезны для морской навигации , поскольку они могут перемещаться на очень большие расстояния и «за горизонт», что ценно для кораблей, когда прямая видимость может составлять всего несколько десятков километров. Для самолетов, где горизонт на высоте может достигать сотен километров, можно использовать более высокие частоты, что позволяет использовать антенны гораздо меньшего размера. Автоматический пеленгатор, часто способный настраиваться на коммерческие AM- радиопередатчики, является особенностью почти всех современных самолетов.
Для военных системы RDF являются ключевым компонентом систем и методологий радиотехнической разведки . Возможность определить местоположение вражеского передатчика имела неоценимое значение со времен Первой мировой войны и сыграла ключевую роль в Второй мировой войны во время битве за Атлантику . По оценкам, передовые британские системы « хафф-дафф » были прямо или косвенно ответственны за 24% всех подводных лодок, потопленных во время войны. [9] В современных системах часто используются антенны с фазированной решеткой , позволяющие быстро формировать луч и получать высокоточные результаты. Обычно они интегрируются в более широкий комплекс средств радиоэлектронной борьбы .
Вслед за новыми разработками в электронике со временем использовалось несколько различных поколений систем RDF. В ранних системах использовались механически вращающиеся антенны, которые сравнивали мощность сигнала с разных направлений, а затем последовало несколько электронных версий той же концепции. Современные системы используют сравнение фазовых или доплеровских методов , которые, как правило, проще автоматизировать. Современные псевдодоплеровские системы пеленгации состоят из ряда небольших антенн, прикрепленных к круглой карте, при этом вся обработка выполняется программным обеспечением.
Ранние британские радары также назывались RDF, что представляло собой тактику обмана. Однако терминология не была неточной; Системы Chain Home использовали отдельные всенаправленные передатчики и большие приемники RDF для определения местоположения целей. [2]
Антенны
[ редактировать ]В одном типе пеленгации направленная антенна используется , которая в одних направлениях более чувствительна, чем в других. Многие конструкции антенн обладают этим свойством. Например, антенна Яги имеет достаточно выраженную направленность, поэтому источник передачи можно определить, направив ее в ту сторону, где достигается максимальный уровень сигнала. Поскольку характеристики направленности могут быть очень широкими, для повышения точности можно использовать большие антенны или нулевые методы для улучшения углового разрешения.

Обнаружение нуля с помощью рамочных антенн
[ редактировать ]Простейшей формой направленной антенны является рамочная антенна . Он состоит из разомкнутой петли провода на изолирующей рамке или металлического кольца, которое само образует рамочный элемент антенны; часто диаметр петли составляет десятую часть длины волны или меньше на целевой частоте. Такая антенна будет наименее чувствительна к сигналам, перпендикулярным ее лицевой стороне, и наиболее чувствительна к сигналам, приходящим с ребра. Это вызвано фазой принимаемого сигнала: разница в электрической фазе по краю петли в любой момент вызывает разницу в напряжениях, индуцированных по обе стороны петли.
Поворот плоскости контура «лицом» к сигналу так, чтобы поступающие фазы были идентичны по всему ободу, не вызовет протекания тока в контуре. Таким образом, простой поворот антенны для получения минимума полезного сигнала установит два возможных направления (спереди и сзади), из которых могут приходить радиоволны. Это называется нулем в сигнале и используется вместо направления самого сильного сигнала, поскольку небольшие угловые отклонения рамочной антенны от ее нулевых положений вызывают гораздо более резкие изменения принимаемого тока, чем аналогичные изменения направления вокруг самого сильного сигнала петли. ориентация. Поскольку нулевое направление дает более четкое представление о направлении сигнала (нулевое значение «резче», чем максимальное), при использовании рамочной антенны нулевое направление используется для определения местоположения источника сигнала.
«Чувствующая антенна» используется для разрешения двух направлений; Считывающая антенна представляет собой ненаправленную антенну, имеющую ту же чувствительность, что и рамочная антенна. Добавляя постоянный сигнал от сенсорной антенны к переменному сигналу от сигнала контура при его вращении, теперь существует только одно положение, когда контур вращается на 360°, в котором ток равен нулю. Это действует как опорная точка фазы, позволяя определить правильную нулевую точку и устраняя неопределенность в 180°. Дипольная антенна демонстрирует те же свойства, что и небольшая петля, хотя ее нулевое направление не такое «острое».
Антенна Яги для более высоких частот
[ редактировать ]Антенна Яги-Уда известна как обычная антенна ОВЧ или УВЧ телевизионная . Антенна Яги использует несколько дипольных элементов, в том числе дипольные элементы «отражатель» и «директор». «Отражатель» является самым длинным дипольным элементом и блокирует почти весь сигнал, поступающий сзади, поэтому Яги не имеет неоднозначности направления вперед или назад: максимальный сигнал возникает только тогда, когда самый узкий конец Яги направлен в направлении от куда приходят радиоволны. При достаточном количестве более коротких элементов «директора» максимальное направление Яги можно приблизить к резкости нуля небольшого цикла. [ нужна ссылка ]
Параболические антенны для сверхвысоких частот
[ редактировать ]Для гораздо более высоких частот, таких как миллиметровые волны и микроволны , параболические антенны или «тарелочные» антенны можно использовать . Параболические антенны имеют узконаправленную форму : принимаемые сигналы направляются под очень узким углом на небольшой приемный элемент, установленный в фокусе параболы.
Электронный анализ сигналов двух антенн
[ редактировать ]Более сложные методы, такие как фазированные решетки, обычно используются для высокоточных систем пеленгации. Современные системы называются гониометрами по аналогии с направленными схемами времен Второй мировой войны , которые использовались для измерения направления путем сравнения различий в принимаемых сигналах двух или более согласованных эталонных антенн, которые использовались в старой системе разведки сигналов (SIGINT). Современная вертолетная система пеленгации была разработана компанией ESL Incorporated для правительства США еще в 1972 году.
Методы разницы во времени прихода сравнивают время прихода радиоволны на две или более разные антенны и определяют направление прихода на основе этой временной информации. В этом методе можно использовать механически простые неподвижные всенаправленные антенные элементы, подаваемые в многоканальную систему приемника.

Операция
[ редактировать ]
Одна из форм радиопеленгации работает путем сравнения мощности сигнала направленной антенны, направленной в разных направлениях. Сначала эта система использовалась радистами наземного и морского базирования с использованием простой вращающейся рамочной антенны, связанной с указателем градуса. Позже эта система была принята как на кораблях, так и на самолетах и широко использовалась в 1930-х и 1940-х годах. На самолетах, выпущенных до Второй мировой войны , антенны RDF легко узнать по круглым петлям, установленным над или под фюзеляжем. Более поздние конструкции рамочной антенны были заключены в аэродинамический обтекатель каплевидной формы. На кораблях и небольших лодках в приемниках RDF сначала использовались большие металлические рамочные антенны, похожие на авиационные, но обычно монтируемые на портативном приемнике с батарейным питанием.
При использовании оператор RDF сначала настраивал приемник на правильную частоту, затем вручную поворачивал контур, либо слушая, либо наблюдая за S-метром, чтобы определить направление нуля (направление, в котором данный сигнал является самым слабым) длинного диапазона. волновой (LW) или средневолновый (AM) радиомаяк или радиостанция (прослушивание нулевого сигнала проще, чем прослушивание пикового сигнала, и обычно дает более точный результат). Этот ноль был симметричным и, таким образом, определял как правильный курс в градусах, отмеченный на розетке компаса радио, так и его противоположность на 180 градусов. Хотя эта информация обеспечивала базовую линию от станции до корабля или самолета, штурману все равно нужно было заранее знать, находится ли он к востоку или западу от станции, чтобы избежать прокладки курса на 180 градусов в неправильном направлении. Определяя пеленги на две или более радиовещательных станций и нанося на график пересекающиеся пеленги, штурман мог определить относительное положение своего корабля или самолета.
Позже комплекты RDF были оснащены вращающимися ферритовыми петлевыми антеннами, что сделало комплекты более портативными и менее громоздкими. Некоторые из них позже были частично автоматизированы с помощью моторизованной антенны (ADF). Ключевым прорывом стало введение вторичной вертикальной штыревой или «чувствительной» антенны , которая подтверждала правильный пеленг и позволяла навигатору избегать построения пеленга на 180 градусов, противоположного фактическому курсу. Модель SE 995 RDF ВМС США, в которой использовалась сенсорная антенна, использовалась во время Первой мировой войны. [10] После Второй мировой войны существовало множество мелких и крупных фирм, производивших пеленгаторное оборудование для моряков, в том числе Apelco , Aqua Guide, Bendix , Gladding (и ее морское подразделение Pearce-Simpson), Ray Jefferson, Raytheon и Sperry . К 1960-м годам многие из этих радиоприемников фактически производились японскими производителями электроники, такими как Panasonic , Fuji Onkyo и Koden Electronics Co., Ltd. В области авиационного оборудования Bendix и Sperry-Rand были двумя крупнейшими производителями радиоприемников RDF и навигационные приборы.
Одноканальный пеленгатор
[ редактировать ]В одноканальной пеленгации используется многоантенная решетка с одноканальным радиоприемником. Этот подход к DF имеет некоторые преимущества и недостатки. Поскольку используется только один приемник, преимуществами являются мобильность и более низкое энергопотребление. Без возможности смотреть на каждую антенну одновременно (что было бы в случае использования нескольких приемников, также известных как N-канальная пеленгация) на антенне должны выполняться более сложные операции, чтобы представить сигнал приемнику.
Двумя основными категориями, на которые попадает одноканальный алгоритм пеленгации, являются сравнение амплитуд и сравнение фаз . Некоторые алгоритмы могут быть гибридами этих двух.
Псевдодопплеровский метод пеленгации
[ редактировать ]Метод псевдодопплера представляет собой метод пеленгации на основе фазы, который производит оценку пеленга принятого сигнала путем измерения доплеровского сдвига , вызванного сигналом путем выборки вокруг элементов круговой решетки. В исходном методе использовалась одна антенна, которая физически перемещалась по кругу, но современный подход использует круговую решетку из нескольких антенн, в которой каждая антенна опрашивается последовательно.
Антенная решетка Уотсона – Ватта или Адкока
[ редактировать ]Метод Уотсона -Ватта использует две пары антенн для сравнения амплитуд входящего сигнала. Популярный метод Уотсона-Ватта использует решетку из двух ортогональных катушек (магнитных диполей) в горизонтальной плоскости, часто дополненную всенаправленным электрическим диполем с вертикальной поляризацией для разрешения неоднозначностей на 180 °.
Антенная решетка Adcock использует пару монопольных или дипольных антенн, которые принимают разность векторов принимаемого сигнала на каждой антенне, так что на каждую пару антенн приходится только один выходной сигнал. Две из этих пар расположены рядом, но перпендикулярно ориентированы для создания так называемых сигналов N–S (Север-Юг) и E–W (Восток-Запад), которые затем будут переданы приемнику. Затем в приемнике угол пеленга можно вычислить, взяв арктангенс отношения сигналов с севера на юг к сигналу с востока на запад.
Корреляционный интерферометр
[ редактировать ]Основной принцип работы корреляционного интерферометра заключается в сравнении измеренных разностей фаз с разностями фаз, полученными для пеленгаторной антенной системы известной конфигурации при известном угле волны (набор справочных данных). Для этого как минимум три антенных элемента (с характеристиками всенаправленного приема) должны образовывать неколлинеарную основу. Сравнение производится для разных значений азимута и угла места опорного набора данных. Результат пеленга получается на основе корреляционной и стохастической оценки, для которой коэффициент корреляции имеет максимум. Если пеленгаторные антенные элементы имеют направленную диаграмму направленности, то в сравнение может быть включена амплитуда.
Обычно пеленгаторная система корреляционного интерферометра состоит из более чем пяти антенных элементов. Они сканируются один за другим с помощью специальной матрицы переключения. В многоканальной пеленгационной системе n антенных элементов объединяются с m каналами приемника для улучшения характеристик пеленгационной системы.
Приложения
[ редактировать ]Радионавигация
[ редактировать ]
Радиопеленгация , радиопеленгатор , или RDF , когда-то была основным авиационным навигационным средством. ( Дальномерность и пеленгация — аббревиатура, используемая для описания предшественника радара . [2] ) Маяки использовались для обозначения пересечений «воздушных трасс» и для определения процедур вылета и захода на посадку. эти маяки называются ненаправленными маяками или NDB Поскольку передаваемый сигнал не содержит информации о пеленге или расстоянии, в мире авиации . Начиная с 1950-х годов эти маяки обычно были заменены системой VOR , в которой пеленг на навигационное средство измеряется на основе сигнала самого ; поэтому не требуется никакой специальной антенны с движущимися частями. Из-за относительно низких затрат на приобретение, обслуживание и калибровку NDB до сих пор используются для обозначения местоположений небольших аэродромов и важных площадок для посадки вертолетов.
Подобные маяки, расположенные в прибрежных районах, также используются для морской радионавигации, поскольку почти каждое судно было оборудовано пеленгатором (Appleyard, 1988). Сегодня (2008 г.) остаются активными очень немногие морские радионавигационные маяки, поскольку корабли отказались от навигации через RDF в пользу GPS-навигации.
В Соединенном Королевстве служба радиопеленгации доступна на частотах 121,5 МГц и 243,0 МГц для пилотов самолетов, терпящих бедствие или испытывающих трудности. Служба базируется на ряде радиопеленгаторов, расположенных в гражданских и военных аэропортах, а также на некоторых станциях береговой охраны Ее Величества. [11] Эти станции могут получить «фиксацию» самолета и передать ее по радио пилоту.

Морская и авиационная навигация
[ редактировать ]


Радиопередатчики для воздушной и морской навигации известны как маяки и являются радиоэквивалентом маяка . Передатчик отправляет передачу кода Морзе на длинных волнах (150–400 кГц) или средних волнах (520–1720 кГц), включая идентификатор станции, который используется для подтверждения станции и ее рабочего состояния. Поскольку эти радиосигналы передаются во всех направлениях (всенаправленно) в течение дня, сам сигнал не включает в себя информацию о направлении, и поэтому эти радиомаяки называются ненаправленными маяками или NDB .
Поскольку диапазон коммерческого средневолнового вещания находится в пределах частотных возможностей большинства устройств RDF, эти станции и их передатчики также могут использоваться для определения навигационных целей. Хотя эти коммерческие радиостанции могут быть полезны из-за их высокой мощности и расположения вблизи крупных городов, между местоположением станции и ее передатчиком может быть несколько миль, что может снизить точность «фиксации» при приближении к транслируемому городу. Вторым фактором является то, что некоторые AM-радиостанции днем работают всенаправленно, а ночью переключаются на направленный сигнал пониженной мощности.
RDF когда-то был основной формой авиации и морской навигации. Ряды маяков образовывали «воздушные пути» от аэропорта к аэропорту, а морские NDB и коммерческие радиовещательные станции AM оказывали навигационную помощь небольшим судам, приближающимся к берегу. В Соединенных Штатах коммерческие AM-радиостанции должны были передавать идентификатор своей станции один раз в час для использования пилотами и моряками в качестве помощи в навигации. В 1950-х годах авиационные NDB были дополнены системой VOR , в которой направление на маяк можно определить из самого сигнала, отсюда и различие с ненаправленными маяками. Использование морских NDB было в значительной степени вытеснено в Северной Америке разработкой LORAN в 1970-х годах.
Сегодня многие NDB выведены из эксплуатации в пользу более быстрых и гораздо более точных навигационных систем GPS . Однако низкая стоимость систем ADF и RDF, а также продолжающееся существование радиовещательных станций AM (а также навигационных маяков в странах за пределами Северной Америки) позволили этим устройствам продолжать функционировать, в первую очередь для использования на небольших лодках, в качестве вспомогательного или вспомогательного средства. резервное копирование на GPS.
Местоположение незаконных, секретных или враждебных передатчиков – SIGINT
[ редактировать ]
Во время Второй мировой войны значительные усилия были затрачены на выявление секретных передатчиков в Соединенном Королевстве (Великобритания) путем пеленгации. Работу взяла на себя Служба радиобезопасности (РСС, также МИ-8). Первоначально три станции U Adcock HF DF были открыты в 1939 году Главпочтамтом. После объявления войны МИ5 и RSS превратили эту сеть в более крупную. Одной из проблем с обеспечением покрытия территории размером с Великобританию была установка достаточного количества радиопеленгаторов для покрытия всей территории и приема сигналов ионосферной волны , отраженных обратно от ионизированных слоев в верхних слоях атмосферы. было привлечено до 1700 добровольных перехватчиков (радиолюбителей) Даже при расширенной сети некоторые районы не были должным образом покрыты, и по этой причине для обнаружения незаконных передач по земной волне . Помимо стационарных станций, RSS управляла парком мобильных пеленгаторов по всей Великобритании. Если передатчик был идентифицирован стационарными радиопеленгаторами или добровольными перехватчиками, мобильные устройства отправлялись в этот район для обнаружения источника. Мобильными подразделениями были системы HF Adcock.
К 1941 году в Великобритании было выявлено всего несколько незаконных передатчиков; это были немецкие агенты, которые были «перевернуты» и вели передачу под контролем МИ-5. Было зарегистрировано множество незаконных передач, исходящих от немецких агентов в оккупированных и нейтральных странах Европы. Трафик стал ценным источником разведывательной информации, поэтому контроль над RSS впоследствии перешел к МИ-6, которая отвечала за секретную разведывательную информацию, поступающую из-за пределов Великобритании. Операции по пеленгации и перехвату увеличивались в объеме и значении до 1945 года.
ВЧ-станции Adcock состояли из четырех 10 -метровых вертикальных антенн, окружающих небольшую деревянную хижину операторов, содержащую приемник и радиогониометр , который был настроен для определения пеленга. Также использовались СВ-станции, в которых использовались четыре 30 -метровые решетчатые башенные антенны с оттяжками. В 1941 году RSS начала эксперименты с пеленгаторами с разнесенной петлей, разработанными компанией Маркони и Национальными физическими лабораториями Великобритании . Они состояли из двух параллельных петель площадью от 1 до 2 м на концах вращающейся балки длиной от 3 до 8 м. Угол луча объединялся с результатами радиогониометра для определения пеленга. Полученный пеленг был значительно более четким, чем тот, который был получен с помощью системы U Adcock, но были неясности, которые помешали установке семи предложенных систем SL DF. Оператор системы SL находился в металлическом подземном резервуаре под антеннами. Было установлено семь подземных резервуаров, но только две системы SL были установлены в Уаймондхэме, Норфолке и Уиверторпе в Йоркшире. Возникли проблемы, в результате которых оставшиеся пять подземных резервуаров были оснащены системами Adcock. Вращающаяся антенна SL поворачивалась вручную, что означало, что последовательные измерения происходили намного медленнее, чем вращение шкалы гониометра.
Еще одна экспериментальная станция с разнесенной петлей была построена недалеко от Абердина в 1942 году для Министерства авиации с полуподземным бетонным бункером. От этого тоже отказались из-за трудностей в эксплуатации. К 1944 году была разработана мобильная версия разнесенной петли, которая использовалась RSS во Франции после вторжения в Нормандию в день Д.
Военные США использовали береговую версию DF с разнесенной петлей во время Второй мировой войны под названием «DAB». Петли были размещены на концах балки, все они располагались внутри деревянной хижины, а электроника находилась в большом шкафу с дисплеем на электронно-лучевой трубке в центре балки, и все поддерживалось на центральной оси. Балка вращалась оператором вручную.
В 1944 году Королевский флот представил вариант береговых радиопеленгаторов для отслеживания подводных лодок в Северной Атлантике. Они построили группы из пяти радиопеленгаторов, чтобы пеленги отдельных станций в группе можно было объединить и получить среднее значение. Четыре таких группы были построены в Великобритании в Форд-Энде , Эссексе, Гунхаверне, Корнуолле, Анструтере и Бауэрмаддене в Шотландском Хайленде. Группы были также построены в Исландии, Новой Шотландии и на Ямайке. Ожидаемые улучшения не были реализованы, но позже статистические работы улучшили систему, и группы Гунхаверн и Форд-Энд продолжали использоваться во время холодной войны. Королевский флот также развернул пеленгационное оборудование на кораблях, которым было поручено вести противолодочную войну , чтобы попытаться обнаружить немецкие подводные лодки, например, фрегаты класса «Капитан» были оснащены среднечастотной пеленгаторной антенной (MF/DF) (антенна была установлена спереди). мостика) и высокочастотной пеленгации (HF/DF, «Хаффдафф») антенна типа FH 4 (антенна устанавливалась на вершине грот-мачты). [12]
Подробный справочник по беспроводной пеленгации времен Второй мировой войны был написан Роландом Кином, который возглавлял инженерный отдел RSS в Ханслоуп-парке. Упомянутые здесь пеленгационные системы подробно описаны в его книге «Беспроводная пеленгация» 1947 года . [13]
В конце Второй мировой войны ряд пеленгаторных станций RSS продолжали работать и во время холодной войны под контролем GCHQ, британской организации SIGINT.
Большая часть усилий по пеленгации в Великобритании сейчас (2009 г.) направлена на обнаружение несанкционированных « пиратских » радиопередач FM-радиовещания. Сеть дистанционно управляемых УКВ-пеленгаторов используется в основном вокруг крупных городов. Передачи с трубок мобильных телефонов также определяются с помощью пеленгации с использованием сравнительной мощности сигнала на окружающих местных приемниках «соты». Этот метод часто предлагается в качестве доказательства в уголовных преследованиях в Великобритании и, почти наверняка, для целей SIGINT. [14]
Экстренная помощь
[ редактировать ]Аварийные аварийно-спасательные маяки широко используются на гражданских самолетах и кораблях. Исторически сложилось так, что передатчики аварийного местоположения посылали только тональный сигнал и полагались на пеленгацию поискового самолета для определения местоположения маяка. Современные аварийные маяки передают уникальный идентификационный сигнал, который может включать данные о местоположении GPS , которые могут помочь в определении точного местоположения передатчика.
Лавинные трансиверы работают на стандартной частоте 457 кГц и предназначены для помощи в обнаружении людей и оборудования, погребенных под лавинами. Поскольку мощность маяка очень мала, на направленность радиосигнала влияют мелкомасштабные эффекты поля. [15] и его может быть довольно сложно найти.
Отслеживание дикой природы
[ редактировать ]Определение радиоактивно меченых животных методом триангуляции является широко применяемым исследовательским методом изучения передвижения животных. Этот метод был впервые использован в начале 1960-х годов, когда радиопередатчики и батареи стали достаточно маленькими, чтобы их можно было прикреплять к дикой природе, и сейчас широко применяется для различных исследований дикой природы. В большинстве случаев отслеживание диких животных, оснащенных радиопередатчиком, осуществляется полевым исследователем с использованием портативного радиопеленгатора. Когда исследователь хочет найти конкретное животное, его местоположение можно триангулировать, определив направление к передатчику из нескольких мест.
Разведка
[ редактировать ]Фазированные решетки и другие передовые антенные технологии используются для отслеживания запусков ракетных систем и их траекторий. Эти системы могут использоваться в оборонительных целях, а также для получения разведывательной информации о работе ракет, принадлежащих другим странам. Эти же методы используются для обнаружения и отслеживания обычных самолетов .
Астрономия
[ редактировать ]Наземные приемники могут обнаруживать радиосигналы, исходящие от далеких звезд или областей ионизированного газа. Приемники радиотелескопов могут определять общее направление таких естественных радиоисточников, иногда сопоставляя их местоположение с объектами, видимыми в оптические телескопы. Точное измерение времени прихода радиоимпульсов двумя радиотелескопами в разных местах Земли или одним и тем же телескопом в разное время на орбите Земли вокруг Солнца также может позволить оценить расстояние до радиообъекта.
Спорт
[ редактировать ]Мероприятия, проводимые группами и организациями, которые предусматривают использование навыков радиопеленгации для обнаружения передатчиков в неизвестных местах, стали популярны после окончания Второй мировой войны. [16] Многие из этих мероприятий были впервые организованы с целью попрактиковаться в использовании методов радиопеленгации для реагирования на стихийные бедствия и в целях гражданской обороны или для тренировки определения источника радиочастотных помех . Самый популярный во всем мире вид спорта известен как любительская радиопеленгация или международная аббревиатура ARDF. Другая форма деятельности, известная как « охота на передатчик », «мобильная Т-охота» или «охота на лис», происходит на более обширной географической территории, например, в агломерации большого города, и большинство участников путешествуют на автотранспортных средствах , в то время как попытка обнаружить один или несколько радиопередатчиков с помощью методов радиопеленгации.
 РДФ-антенны
РДФ-антенны
( Остров Галета )
 РДФ на 121,5 МГц
РДФ на 121,5 МГц
( Аварийная частота воздушного судна ) Антенна 121,5/156,8 МГц
Антенна 121,5/156,8 МГц
(Самолет с аварийным радиомаяком) Станция РДФ 410 кГц
Станция РДФ 410 кГц Морская станция РДФ (ГТ-302)
Морская станция РДФ (ГТ-302) Морская станция РДФ
Морская станция РДФ
(Пеленгатор)






Пеленгация на сверхвысокочастотных частотах
[ редактировать ]Методы пеленгации микроволновых частот были разработаны в 1940-х годах в ответ на рост числа передатчиков, работающих на этих более высоких частотах. Это потребовало разработки новых антенн и приемников для систем пеленгации.
В военно-морских системах возможности пеленгации стали частью комплекса мер электронной поддержки (ESM). [17] : 6 [18] : 126 [19] : 70 где полученная информация о направлении дополняет другие процессы идентификации сигнала. В самолетах система пеленгации предоставляет дополнительную информацию для приемника радиолокационного предупреждения (RWR).
Со временем возникла необходимость улучшить характеристики систем радиопеленгации, чтобы противостоять тактике уклонения, используемой некоторыми операторами, такой как радары с низкой вероятностью перехвата и скрытые каналы передачи данных .
Краткая история развития СВЧ
[ редактировать ]Ранее в этом столетии электронные лампы (термоэлектронные клапаны) широко использовались в передатчиках и приемниках, но их высокочастотные характеристики были ограничены эффектами времени прохождения. [20] : 192 [21] : 394 [22] : 206 Даже при использовании специальных процессов для уменьшения длины выводов, [23] например, конструкция рамной сетки, используемая в EF50 , и плоская конструкция, [20] : 192 очень немногие лампы могли работать выше УВЧ .
В 1930-е годы велась интенсивная исследовательская работа по разработке передающих ламп именно для СВЧ-диапазона, к которым, в частности, относились клистроны. [24] [20] : 201 магнетрон с резонатором [20] : 347 [24] : 45 и лампа бегущей волны (ЛБВ). [20] : 241 [24] : 48 После успешной разработки этих трубок в следующем десятилетии началось их крупномасштабное производство.
Преимущества работы в микроволновой печи
[ редактировать ]Микроволновые сигналы имеют короткие длины волн, что приводит к значительному улучшению разрешения цели по сравнению с радиочастотными системами. Это позволяет лучше идентифицировать несколько целей, а также повышает точность направления. [25] Кроме того, антенны небольшие, поэтому их можно собрать в компактные решетки, и, кроме того, они могут обеспечить четко определенные диаграммы направленности, что может обеспечить узкие лучи с высоким коэффициентом усиления, предпочитаемым радарами и линиями передачи данных .
Другими преимуществами нового доступного микроволнового диапазона было отсутствие замираний (часто проблема в коротковолновом радиодиапазоне (КВ)) и значительное увеличение спектра сигнала по сравнению с уже используемыми перегруженными радиочастотными диапазонами. Помимо возможности принимать гораздо больше сигналов, теперь стала возможной возможность использовать методы расширения спектра и скачкообразной перестройки частоты .
После того как микроволновая техника получила распространение, этот диапазон быстро расширился как военными, так и коммерческими пользователями.
Антенны для пеленгации
[ редактировать ]Антенны для пеленгации должны отвечать требованиям, отличным от требований для радаров или линий связи, где антенна с узким лучом и высоким коэффициентом усиления обычно является преимуществом. Однако при выполнении пеленгации пеленг источника может быть неизвестен, поэтому антенны с широкой шириной луча обычно выбирают , даже если они имеют меньший коэффициент усиления в направлении оси антенны . Кроме того, антенны должны перекрывать широкую полосу частот.
На рисунке показан нормированный полярный график типичной характеристики усиления антенны в горизонтальной плоскости. по половинной мощности Ширина луча главного луча равна 2 × Ψ 0 . Предпочтительно при использовании методов сравнения амплитуд для пеленгации главный лепесток должен приближаться к гауссовой характеристике. Хотя на рисунке также показано наличие боковых лепестков , они не являются серьезной проблемой при использовании антенн в пеленгаторной решетке.
Обычно усиление антенны связано с шириной луча. [26] : 257 Для прямоугольного рупора усиление ≈ 30 000/BW h .BW v , где BW h и BW v — горизонтальная и вертикальная ширина диаграммы направленности антенны, соответственно, в градусах. Для круглой апертуры с шириной луча BW c коэффициент усиления ≈ 30 000/BW c. 2 .
с резонатором Два типа антенн, популярные для пеленгации, — это спиральные антенны и рупорные антенны .
 Полярный график антенны
Полярный график антенны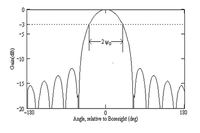 График диаграммы антенны
График диаграммы антенны Спираль с полостью
Спираль с полостью Пирамидальный рог
Пирамидальный рог




Спиральные антенны имеют очень широкую полосу пропускания. [26] : 252 [27] и имеют номинальную ширину луча по половинной мощности около 70 градусов, что делает их очень подходящими для антенных решеток, содержащих 4, 5 или 6 антенн. [18] : 41
Для более крупных решеток, требующих более узкой ширины луча , можно использовать рупоры. Полоса пропускания рупорных антенн может быть увеличена за счет использования двухгребневых волноводных облучателей. [28] [18] : 72 и используя рога с внутренними гребнями. [29] : 267 [30] : 181
СВЧ-приемники
[ редактировать ]Ранние получатели
[ редактировать ]Ранние микроволновые приемники обычно представляли собой простые приемники «кристального видео». [31] : 169 [18] : 172 [32] в которых используется кварцевый детектор, за которым следует видеоусилитель с компрессионной характеристикой для расширения динамического диапазона. Такой приемник был широкополосным, но не очень чувствительным. Однако с этой недостаточной чувствительностью можно было мириться из-за «преимущества дальности», которым обладает пеленгаторный приемник (см. ниже).
Клистронные и ЛБВ предусилители
[ редактировать ]Клистрон и ЛБВ являются линейными устройствами и поэтому в принципе могут использоваться в качестве предусилителей приемника. Однако клистрон оказался совершенно непригоден, так как был узкополосным устройством и чрезвычайно шумным. [21] : 392 и ЛБВ, хотя потенциально более подходящая, [21] : 548 имеет плохие характеристики согласования и большой размер, что делает его непригодным для многоканальных систем, использующих предусилитель на каждую антенну. Однако была продемонстрирована система, в которой один предусилитель ЛБВ избирательно выбирает сигналы из антенной решетки. [33]
Транзисторные предусилители
[ редактировать ]Транзисторы, подходящие для работы на сверхвысоких частотах, стали доступны к концу 1950-х годов. Первым из них был металлооксид-полупроводниковый полевой транзистор (MOSFET). За ними последовали другие, например, металл-полупроводниковый полевой транзистор и транзистор с высокой подвижностью электронов (HEMT). Первоначально дискретные транзисторы были встроены в полосковые или микрополосковые схемы, но затем появились СВЧ-интегральные схемы . Благодаря этим новым устройствам стало возможным создание малошумящих предусилителей приемника, что значительно увеличило чувствительность и, следовательно, дальность обнаружения пеленгационных систем.
Преимущество дальности
[ редактировать ]Источник: [34]
Пеленгаторный приемник имеет преимущество в дальности обнаружения. [35] больше, чем у приемника радара. Это связано с тем, что мощность сигнала в пеленгаторном приемнике, обусловленная передачей радара, пропорциональна 1/R. 2 тогда как в приемнике радара от отраженного отражения пропорциональна σ/R 4 , где R — дальность, а σ — радиолокационное сечение системы пеленгации. [36] Это приводит к тому, что мощность сигнала на приемнике радара намного меньше, чем на пеленгационном приемнике. Следовательно, несмотря на свою низкую чувствительность, простой кристаллический видеопеленгатор обычно способен обнаружить передачу сигнала от РЛС на большей дальности, чем та, на которой собственный приемник РЛС способен обнаружить наличие пеленгатора. система. [18] : 8
На практике преимущество снижается за счет соотношения коэффициентов усиления антенны (обычно они составляют 36 дБ и 10 дБ для радара и ESM соответственно) и использования радаром методов расширения спектра , таких как сжатие чирпа , для увеличения усиление обработки его приемника. С другой стороны, система пеленгации может вернуть себе некоторые преимущества за счет использования чувствительных малошумящих приемников и применения методов малозаметности для уменьшения ее радиолокационной эффективности . [29] : 292 как в случае с самолетами-невидимками и кораблями-невидимками .
Новые требования к пеленгаторным системам
[ редактировать ]Переход на микроволновые частоты означал переоценку требований к пеленгаторной системе. [37] Теперь приемник больше не мог полагаться на непрерывный поток сигналов для проведения измерений. Радары с их узкими лучами лишь изредка освещали антенны пеленгаторной системы. Более того, некоторые радары, стремящиеся избежать обнаружения (контрабандистов, вражеских кораблей и ракет), будут излучать свои сигналы нечасто и часто на малой мощности. [38] Такая система называется радаром малой вероятности перехвата . [39] [40] В других приложениях, таких как микроволновые линии связи, антенна передатчика может вообще не быть направлена на пеленгаторный приемник, поэтому прием возможен только за счет утечки сигнала из боковых лепестков антенны . Кроме того, скрытые каналы передачи данных [41] может лишь изредка излучать последовательность данных с высокой скоростью передачи данных.
В общем, чтобы соответствовать современным обстоятельствам, широкополосная система микроволнового пеленгирования должна иметь высокую чувствительность и охват 360°, чтобы иметь возможность обнаруживать одиночные импульсы (часто называемые амплитудными моноимпульсами ) и достигать высокой «вероятности обнаружения». Перехват» (ЛПИ). [42]
DF по сравнению амплитуд
[ редактировать ]Сравнение амплитуд стало популярным методом пеленгации, поскольку системы относительно просты в реализации, обладают хорошей чувствительностью и, что очень важно, высокой вероятностью обнаружения сигнала. [43] : 97 [18] : 207 Обычно для обеспечения покрытия на 360 градусов используется массив из четырех или более наклоненных направленных антенн. [44] : 155 [18] : 101 [45] : 5–8.7 [43] : 97 [46] DF с помощью методов сравнения фаз может обеспечить лучшую точность подшипников, [45] : 5–8.9 но обработка более сложна. Системы, использующие одну вращающуюся тарельчатую антенну, более чувствительны, малы по размеру и относительно просты в реализации, но имеют плохой PoI. [42]
Обычно амплитуды сигналов в двух соседних каналах массива сравниваются, чтобы определить направление входящего волнового фронта, но иногда для повышения точности используются три соседних канала. Хотя коэффициенты усиления антенн и их усилительных цепей должны быть точно согласованы, тщательное проектирование и конструкция, а также эффективные процедуры калибровки могут компенсировать недостатки аппаратного обеспечения. Сообщается, что общая точность пеленга составляет от 2° до 10° (среднеквадратичное значение). [45] [47] используя метод.
Двухканальный пеленгатор
[ редактировать ]


Двухканальная пеленгация с использованием двух соседних антенн круговой решетки достигается путем сравнения мощности сигнала наибольшего сигнала с мощностью второго по величине сигнала. Направление входящего сигнала внутри дуги, описываемой двумя антеннами с углом наклона Φ, можно получить путем сравнения относительных мощностей полученных сигналов. Когда сигнал находится в направлении одной из антенн, сигнал на другой антенне будет примерно на 12 дБ ниже. Когда направление сигнала находится посередине между двумя антеннами, уровни сигнала будут равны и примерно на 3 дБ ниже, чем значение точки прицеливания. При других углах пеленга φ направление задаст какое-то промежуточное соотношение уровней сигнала.
Если диаграммы направленности основных лепестков антенны имеют гауссову характеристику, а мощность сигнала описывается в логарифмических терминах (например, децибелы (дБ) относительно значения прицеливания), то существует линейная зависимость между углом пеленга φ и разностью уровней мощности: т.е. φ ∝ (P1(дБ) - P2(дБ)), где P1(дБ) и P2(дБ) — выходные сигналы двух соседних каналов. На миниатюре показан типичный сюжет.
Чтобы обеспечить охват 360°, антенны круглой решетки выбираются попарно в соответствии с уровнями сигнала, принимаемыми каждой антенной. Если в решетке имеется N антенн с угловым расстоянием (углом косоглазия) Φ, то Φ = 2π/N радиан (= 360/N градусов).
Основные уравнения для двухпортового DF
[ редактировать ]Если основные лепестки антенн имеют гауссову характеристику, то выходной сигнал P 1 (φ) как функция угла пеленга φ определяется выражением [18] : 238
![{\displaystyle P_{1}(\phi )=G_{0}.\exp {\Bigr [}-A.{\Big (}{\frac {\phi }{\Psi _{0}}}{\ Большой )}^{2}{\Bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5f15d7dd42215d4cc1c027bf5b8131d0aed564f8)
где
- G 0 — коэффициент усиления антенны (т. е. когда ø = 0),
- Ψ 0 половинной мощности. — половина ширины луча
- A = -\ln(0,5), так что P 1 (ø)/P1 0 = 0,5, когда ø = Ψ 0
- а углы указаны в радианах.
Вторая антенна, прищуренная на Фи и с тем же коэффициентом усиления G 0, дает на выходе
![{\displaystyle P_{2}=G_{0}.\exp {\Bigr [}-A.{\Big (}{\frac {\Phi -\phi }{\Psi _{0}}}{\Big )}^{2}{\Bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bc00f945971d79d862beef86c331cda16c84758)
Сравнивая уровни сигналов,
![{\displaystyle {\frac {P_{1}}{P_{2}}}={\frac {\exp {\big [}-A.(\phi /\Psi _{0})^{2}{ \big ]}}{\exp {\Big [}-A{\big [}(\Phi -\phi )/\Psi _{0}{\big ]}^{2}{\Big ]}}} =\exp {\Big [}{\frac {A}{\Psi _{0}^{2}}}.(\Phi ^{2}-2\Phi \phi ){\Big ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2d96901e6bd34d6d62ba99c6ea643fe8c2b59a60)
Натуральный логарифм отношения равен

Перестановка
![{\displaystyle \phi ={\frac {\Psi _{0}^{2}}{2A.\Phi }}.{\big [}\ln(P_{2})-\ln(P_{1} ){\big ]}+{\frac {\Phi }{2}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/86d7f75574799ac307ce780b77f7aae1d52d33a6)
Это показывает линейную зависимость между разностью выходных уровней, выраженной логарифмически, и углом наклона ø.
Натуральные логарифмы можно преобразовать в децибелы (дБ) (где дБ относятся к усилению прицеливания), используя ln(X) = X(дБ)/(10.\log 10 (e)), поэтому уравнение можно записать
![{\displaystyle \phi ={\frac {\Psi _{0}^{2}}{6.0202\Phi }}.{\big [}P_{2}(дБ)-P_{1}(дБ){\ большой ]}+{\frac {\Phi }{2}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b247d0bdef7c7453e0a57108a6662c6e39cb78f9)
Трехканальный DF
[ редактировать ]

Повышение точности пеленга может быть достигнуто, если в обработку пеленга включены данные об амплитуде от третьей антенны. [48] [44] : 157
Для трехканальной пеленгации с тремя антеннами, скошенными под углами Ф, направление приходящего сигнала определяется путем сравнения мощности сигнала канала, содержащего наибольший сигнал, с мощностями сигналов двух соседних каналов, расположенных по обе стороны от него. .
Для антенн в круговой решетке выбираются три антенны в соответствии с уровнями принимаемого сигнала, при этом наибольший сигнал присутствует в центральном канале.
Когда сигнал находится в направлении Антенны 1 (φ = 0), сигнал от двух других антенн будет таким же и примерно на 12 дБ ниже. Когда направление сигнала находится посередине между двумя антеннами (φ = 30°), уровни их сигналов будут равны и примерно на 3 дБ ниже, чем значение прицеливания, при этом третий сигнал теперь примерно на 24 дБ ниже. При других углах пеленга ø направление зададут некоторые промежуточные отношения уровней сигнала.
Основные уравнения трехполюсного DF
[ редактировать ]Для сигнала, поступающего по пеленгу ø, который здесь взят справа от направления Антенны 1:
Выход канала 1
![{\displaystyle P_{1}=G_{T}.\exp {\Bigr [}-A.{\Big (}{\frac {\phi }{\Psi _{0}}}{\Big)}^ {2}{\Большой ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9cd6ef95366a8a132a862b8e6ddb8b1a993f8aea)
Выход канала 2
![{\displaystyle P_{2}=G_{T}.\exp {\Bigr [}-A.{\Big (}{\frac {\Phi -\phi }{\Psi _{0}}}{\Big )}^{2}{\Bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ed0e9099b9ee075ea7e910dad6b6c66baef9879d)
Выход канала 3
![{\displaystyle P_{3}=G_{T}.\exp {\Bigr [}-A.{\Big (}{\frac {\Phi +\phi }{\Psi _{0}}}{\Big )}^{2}{\Bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/463e9864a50090bb2beb5f93397df4bbe6a67024)
где GT — общее усиление каждого канала, включая усиление в направлении оси антенны, и предполагается, что оно одинаково во всех трех каналах. Как и раньше, в этих уравнениях углы выражены в радианах: Φ = 360/N градусов = 2 π/N радиан и A = -ln(0,5).
Как и ранее, их можно расширить и объединить, чтобы получить:


Устранение A/Ψ 0 2 и перестановка

где Δ 1,3 = \ln(P 1 ) - ln(P 3 ), Δ 1,2 = \ln(P 1 ) - \ln(P 2 ) и Δ 2,3 = \ln(P 2 ) - \ln(P3 ) ,
Значения разницы здесь указаны в неперах, но могут быть и в децибелах .
Значение пеленга, полученное с помощью этого уравнения, не зависит от ширины луча антенны (= 2,Ψ0), поэтому для получения точных результатов пеленга не обязательно знать это значение. Кроме того, существует эффект сглаживания для значений пеленга вблизи оси визирования средней антенны, поэтому здесь нет разрыва в значениях пеленга, поскольку входящие сигналы перемещаются слева направо (или наоборот) по направлению визирования, что может произойти с двухканальной обработкой.
Неопределенность подшипника из-за шума
[ редактировать ]Многие причины ошибок пеленга, такие как механические дефекты конструкции антенны, плохое согласование коэффициентов усиления приемника или неидеальные диаграммы направленности усиления антенны, можно компенсировать процедурами калибровки и корректирующими справочными таблицами, но тепловой шум всегда будет унизительный фактор. Поскольку все системы генерируют тепловой шум [49] [50] тогда, когда уровень входящего сигнала низкий, отношение сигнал/шум в каналах приемника будет плохим, и точность прогнозирования пеленга пострадает.
В целом, руководство по неопределенности подшипников дается следующим образом: [45] [51] > : 82 [31] : 91 [52] : 244
- степени

для сигнала в точке пересечения, но где SNR 0 — это отношение сигнал/шум, которое будет применяться в точке прицеливания.
Чтобы получить более точные прогнозы для данного пеленга, используются фактические отношения S:N интересующих сигналов. (Результаты могут быть получены в предположении, что ошибки, вызванные шумом, аппроксимируются путем соотнесения дифференциалов с некоррелированным шумом).
Для смежной обработки с использованием, скажем, каналов 1 и 2, неопределенность пеленга (угловой шум) Δø (среднеквадратичное значение) приведена ниже. [18] [31] : 91 [53] В этих результатах предполагается обнаружение по квадратичному закону, а значения SNR даны для сигналов видео (модульного диапазона) для угла пеленга φ.
- рад

где SNR 1 и SNR 2 — это значения отношения сигнал-шум видео (основной полосы) для каналов для Антенны 1 и Антенны 2, когда используется квадратичное обнаружение.
В случае 3-канальной обработки выражение, которое применимо, когда отношение S:N во всех трех каналах превышает единицу (когда ln(1 + 1/SNR) ≈ 1/SNR верно во всех трех каналах), имеет вид

где SNR 1 , SNR 2 и SNR 3 представляют собой значения отношения видеосигнала к шуму для канала 1, канала 2 и канала 3 соответственно для угла пеленга φ.
Типичная пеленгаторная система с шестью антеннами.
[ редактировать ]
Схема возможной системы пеленгации, [18] : 101 используя шесть антенн, [54] [55] показано на рисунке.
Сигналы, полученные антеннами, сначала усиливаются малошумящим предусилителем, а затем обнаруживаются детекторно-логарифмическими видеоусилителями (DLVA). [56] [57] [58] Уровни сигналов от DLVA сравниваются для определения угла прихода. За счет рассмотрения уровней сигнала в логарифмическом масштабе, как это предусмотрено DLVA, достигается большой динамический диапазон. [56] : 33 и, кроме того, расчеты пеленгации упрощаются, когда основные лепестки диаграмм направленности антенны имеют гауссову характеристику, как было показано ранее.
Необходимой частью анализа пеленгации является определение канала, который содержит наибольший сигнал, и это достигается с помощью схемы быстрого компаратора. [44] Помимо процесса пеленгации, можно исследовать и другие свойства сигнала, такие как длительность импульса, частота, частота повторения импульсов (PRF) и характеристики модуляции. [45] Работа компаратора обычно включает гистерезис, чтобы избежать дрожания в процессе выбора, когда направление входящего сигнала таково, что два соседних канала содержат сигналы одинаковой амплитуды.
Часто широкополосные усилители защищаются от местных источников высокой мощности (например, на корабле) с помощью входных ограничителей и/или фильтров. Аналогично, усилители могут содержать режекторные фильтры для удаления известных, но нежелательных сигналов, которые могут ухудшить способность системы обрабатывать более слабые сигналы. Некоторые из этих вопросов рассматриваются в цепочке РФ .
См. также
[ редактировать ]- Амплитудный моноимпульс
- AN/FLR-9 — КВ-пеленгационная система ВВС США времен Холодной войны.
- AN/FRD-10 — КВ-пеленгационная система ВМС США времен Холодной войны.
- Битва лучей
- Электрический маяк
- Геолокация
- Система внутреннего позиционирования
- МУЗЫКА (алгоритм)
- Фазовая интерферометрия
- Фиксация позиции
- Определение радио
- Исправление радио
- Радиолокация
- Система определения местоположения в реальном времени
- ТДОА
- ДО / ДМЕ
- Шерстяной ткач
Ссылки
[ редактировать ]- ^ «План реализации следующего поколения на 2013 год» (PDF) . Архивировано из оригинала (PDF) 23 октября 2013 г.
- ^ Перейти обратно: а б с «Радар (радиопеленгация) – глаза истребительного командования» .
- ^ Йеанг 2013 , с. 187.
- ^ Бейкер 2013 , с. 150.
- ^ Хоуэт 1963 , с. 261.
- ^ Йеанг 2013 , с. 188.
- ^ "Вещательная станция может вести флаер", апрель 1931 г., Popular Science.
- ^ «История радиопеленгации» . www.seefunknetz.de . Проверено 11 августа 2023 г.
- ^ Бауэр, Артур О. (27 декабря 2004 г.). «HF/DF: оружие союзников против немецких подводных лодок 1939–1945» (PDF) . Проверено 26 января 2008 г. Документ о технологии и практике использования систем HF/DF, используемых Королевским флотом против подводных лодок во Второй мировой войне.
- ^ Гебхард, Луи А «Эволюция военно-морской радиоэлектроники и вклад Военно-морской исследовательской лаборатории» (1979)
- ^ Смит, диджей (2005). Справочник по радио Air Band (8-е изд.). Издательство Саттон. стр. 104–105. ISBN 0-7509-3783-1 .
- ^ Эллиотт (1972), с. 264
- ^ Кин, Р. (1947). Беспроводная пеленгация (4-е изд.). Лондон, Великобритания: Илифф.
- ^ деРоса, Луизиана (1979). «Пеленгация». В Ж. А. Бийде; Д. Б. Харрис; ДД Кинг; HW Уэлч младший (ред.). Электронные противодействия . Лос-Альтос, Калифорния: Издательство Peninsula Publishing. ISBN 0-932146-00-7 .
- ^ * Дж. Херефорд и Б. Эджерли (2000). «Электромагнетизм 457 кГц и будущее лавинных приемопередатчиков» (PDF) . Международный семинар по науке о снеге (ISSW 2000) . Архивировано из оригинала (PDF) 22 июля 2011 года.
- ^ Титтерингтон, Б.; Уильямс, Д.; Дин, Д. (2007). Радиоориентирование – Справочник ARDF . Радиообщество Великобритании. ISBN 978-1-905086-27-6 .
- ^ Цуй Дж. Б., «СВЧ-приемники с применением радиоэлектронной борьбы», Крейбер, 1992 г.
- ^ Перейти обратно: а б с д и ж г час я дж Липский С.Е., «СВЧ-пассивная пеленгация», Wiley, 1987 г.
- ^ Ричардсон Д., «Техника и оборудование радиоэлектронной борьбы», Arco Publishing, Нью-Йорк, 1985 г.
- ^ Перейти обратно: а б с д и Гилмор младший. АС, «СВЧ-лампы», Дом Артех, 1986 г.
- ^ Перейти обратно: а б с Бек, AHW, «Термоэлектронные клапаны», издательство Кембриджского университета, 1953 г.
- ^ Баден Фуллер AJ, "Микроволны" Pergamon Press, 1979.
- ^ Хоойманс П., "История тюнера Филиппа". Найдите на http://maximus-randd.com/tv-tuner-history-pt1.html.
- ^ Перейти обратно: а б с Гупта К.С., "Микроволны", New Age Intnl. Паб., 2012.
- ^ Учебное пособие «Преимущества микроволновой печи», Вводная статья в микроволновой технике.
- ^ Перейти обратно: а б Штуцман В.Л. и Тиле Г.А., «Теория и конструкция антенны», 2-е изд., Wiley, 1998.
- ^ Морган Т.Е., «Спиральные рога для ESM», протокол IEE, Vol. 132, Пт. Ф., № 4, июль 1985 г., стр. 245 - 251.
- ^ Миллиган Т.А., «Современный дизайн антенны», 2-е изд., Wiley, 2005 г.
- ^ Перейти обратно: а б Кингсли С. и Квеган С., «Понимание радиолокационных систем», McGraw-Hill 1992, SciTech Publishing, 1999.
- ^ Clarricoats PJB и Olver AD, «Гофрированные рупоры для микроволновых антенн», Питер Перигринус, 1984 г.
- ^ Перейти обратно: а б с Уайли Р.Г., Электронная разведка: перехват радиолокационных сигналов , Artech House, 1985 г.
- ^ Липкин HJ, «Кристаллические видеоприемники», Серия MIT Radiation, том 23, Микроволновые приемники, глава 19, стр. 504-506. Найти по адресу: https://archive.org/details/MITRadiationLaboratorySeries23MicrowaveReceivers.
- ^ Кили Д.Г., «Достижения в области микроволновой пеленгации», Proc. ИЭЭ, Том. 113, № 11, ноябрь 1964 г., стр. 1967–1711.
- ^ East PW, «Преимущество диапазона ESM», IEE Proceedings F - Связь, радар и обработка сигналов, Том 132, № 4, июль 1985 г., стр. 223–225
- ^ Дэвидсон К., «Электронные датчики поддержки». Найти: https://radar-engineer.com/files/Lecture_ES_Sensors.pdf .
- ^ Коннор Ф.Р., «Антенны», Эдвард Арнольд, 1972, стр.8.
- ^ Вулиер Д.Ф., «Системные соображения для военно-морской ESM», IEE Proc. Том. 132, Пт. Ф, № 4, июль 1985 г.
- ^ Wise JC, «Перспектива конструкции приемника РЭБ», Tech. Отчет APA-TR-2009-1102, JC Wise and Associates, ноябрь 2009 г., найти по адресу:. https://ausairpower.net/APA-Maritime-ESM.html
- ^ Дэвидсон К., «Низкая вероятность перехвата», найти по адресу: http://radar-engineer.com/files/Lecture_LPI_Radar.pdf.
- ^ Стоув А.Г., Хьюм А.Л. и Бейкер С.Дж., «Низкая вероятность стратегий радиолокационного перехвата», IEE Proc. Сонар Навиг., Том. 151, № 5, октябрь 2004 г.
- ^ Миллс RF и Прескотт GE, «Модели обнаруживаемости для сетей множественного доступа с низкой вероятностью перехвата», IEEE Trans on Aerospace and Electronic System, Vol.36, No.3, июль 2000 г., стр> 848-858.
- ^ Перейти обратно: а б Хэтчер Б.Р., «Системы обнаружения РЭБ - вероятность перехвата и время перехвата» , Технические заметки Уоткинса-Джонсона, том. 3, № 3, май/июнь 1976 г.
- ^ Перейти обратно: а б Цуй Дж. Б., «СВЧ-приемники с применением радиоэлектронной борьбы», Крайбер, Флорида, 1992 г.
- ^ Перейти обратно: а б с East PW, «Инструменты проектирования микроволновых систем с приложениями РЭБ», Artech House, 2-е изд., 2008 г.
- ^ Перейти обратно: а б с д и Национальный центр воздушной войны, «Радиоэлектронная борьба и радиолокационные системы», NAWCWD TP 8347, 4-е изд., 2013 г. См.: www.microwaves101.com/encyclepedias/ew-and-radar-handbook).
- ^ Ly PQC, «Быстрое и однозначное пеленгование для цифровых радиолокационных приемников перехвата», Univ. Аделаиды, декабрь 2013 г., с. 16. Найти по адресу: https://digital.library.adelaide.edu.au/dspace/bitstream/2440/90332/4/02whole.pdf.
- ^ Блейк Б. (редактор), Системы ESM «Манта», «Скипетр» и «Абордаж», Радар Джейн и системы радиоэлектронной борьбы, 1-е изд., Информационная группа Джейн, 1989, стр. 344–345
- ^ Стотт Г.Ф., «Алгоритмы DF для ESM», Материалы конференции Military Microwaves '88, Лондон, июль 1988 г., стр. 463–468.
- ^ Коннор Ф.Р., Шум , Эдвард Арнольд, Лондон, 2-е изд. 1982, с. 44
- ^ Шварц М., «Передача информации, модуляция и шум», МакГроу-Хилл, Нью-Йорк, 4-е изд., 1990, стр.525.
- ^ Аль-Шараби KIA и Мухаммад Д.Ф., «Проектирование широкополосного радиопеленгатора на основе сравнения амплитуд», Al-Rafidain Engineering, Vol. 19 октября 2011 г., стр. 77–86 (найти по адресу: www.iasj.net/iasj?func=fulltext&aid=26752).
- ^ Мартино А. Де, «Введение в современные системы РЭБ», 2-е изд., Artech House 2012
- ^ East P, «Оценка чувствительности микроволнового приемника перехвата», Отчет Racal Defense Systems, 1998 г.
- ^ Блейк Б. (ред.), «Оборудование Cutlass ESM», Jane's Radar and Electronic Warfare Systems, 3-е изд., Jane's Information Group, 1991, стр. 406
- ^ Стритли М., «Система ESM SPS-N 5000», Jane's Radar and Electronic Warfare Systems, 10-е изд., Jane's Information Group, 1998, стр. 396
- ^ Перейти обратно: а б MITEQ, «Компоненты и подсистемы обработки сигналов ПЧ», Замечания по применению», стр. 33–51, (2010 г.), найти по адресу: https://nardamiteq.com/docs/MITEQ_IFsignal_c17.pdf.
- ^ Пастернак, «Широкополосные усилители видеосигнала». Найти: www.pasternack.com/pages/Featured_Products/broadband-log-video-amplifiers.
- ^ Американская микроволновая корпорация, Модель DLVA: LVD-218-50. Найти: www.americanmic.com/catalog/detector-log-video-amplifiers-dlva/
Библиография
[ редактировать ]- Бейкер, WJ (2013). История компании Маркони 1874-1965 гг . Рутледж. ISBN 9781134526079 .
- Эллиотт, Питер (1972). «Капитаны ленд-лиза». Международный военный корабль (3). Международная организация военно-морских исследований : 255.
- Эпплярд, Сан-Франциско; Линфорд, РС; Ярвуд, П.Дж. (1988). Морская электронная навигация (2-е изд.). Рутледж и Кеган Пол. стр. 68–69. ISBN 0-7102-1271-2 .
- М. Бондаренко и В. И. Слюсарь. (август 2011 г.). «Влияние джиттера АЦП на точность пеленгации цифровыми антенными решетками» (PDF) . Радиоэлектроника и системы связи . 54 (8): 436–445. дои : 10.3103/S0735272711080061 . S2CID 110506568 .
- Хауэт, Линвуд (1963). История электроники связи в ВМС США . ВМС США. стр. 261–265.
- Йанг, Чен-Пан (2013). Исследование неба радиоволнами . Издательство Чикагского университета. ISBN 9780226015194 .
- Литература по применению радиопеленгации (продукты RDF)
- Замечания по применению доплеровских систем (доплеровские системы)