Гравитационный поворот

Гравитационный разворот или разворот с нулевой подъемной силой — это маневр, используемый при запуске космического корабля на орбиту вокруг небесного тела, такого как планета или луна , или спуска с нее . Это оптимизация траектории , которая использует гравитацию , чтобы направить транспортное средство на желаемую траекторию. транспортного средства Он предлагает два основных преимущества по сравнению с траекторией, управляемой исключительно за счет собственной тяги . Во-первых, тяга не используется для изменения направления космического корабля, поэтому ее большая часть используется для разгона корабля на орбиту. Во-вторых, что более важно, на начальном этапе подъема машина может поддерживать низкий или даже нулевой угол атаки . Это сводит к минимуму поперечную аэродинамическую нагрузку на ракету-носитель, что позволяет сделать ракету-носитель более легкой. [1] [2]
Термин «гравитационный поворот» также может относиться к использованию гравитации планеты для изменения направления космического корабля в ситуациях, отличных от выхода на орбиту или выхода из нее. [3] В этом контексте он похож на гравитационную рогатку ; разница в том, что гравитационная рогатка часто увеличивает или уменьшает скорость космического корабля и меняет направление, тогда как гравитационный поворот меняет только направление.
Процедура запуска
[ редактировать ]Вертикальный подъем
[ редактировать ]



Гравитационный разворот обычно используется в транспортных средствах с ракетными двигателями, которые запускаются вертикально, например, в космическом шаттле . Ракета начинает полет прямо вверх, набирая вертикальную скорость и высоту. Во время этой части запуска сила тяжести действует прямо против тяги ракеты, снижая ее вертикальное ускорение. Потери, связанные с этим замедлением, известны как гравитационное сопротивление , и их можно свести к минимуму, выполнив следующую фазу запуска, маневр тангажа или программу крена , как можно скорее. Переворот также следует выполнять при небольшой вертикальной скорости, чтобы избежать больших аэродинамических нагрузок на аппарат во время маневра. [1]
Маневр питчинга заключается в том, что ракета слегка подвешивает двигатель, чтобы направить часть своей тяги в сторону. Эта сила создает чистый крутящий момент корабля, поворачивая его так, что он больше не направлен вертикально. ракеты Угол тангажа варьируется в зависимости от ракеты-носителя и включен в инерциальную систему наведения . [1] Для некоторых автомобилей он составляет всего несколько градусов, тогда как другие используют относительно большие углы (несколько десятков градусов). После завершения питчовера двигатели снова перенаправляются так, чтобы они были направлены прямо вниз по оси ракеты. Этот небольшой маневр рулевого управления — единственный раз во время идеального подъема с гравитационным разворотом, когда тяга должна использоваться для рулевого управления. Маневр питчовера преследует две цели. Во-первых, он слегка поворачивает ракету, чтобы ее траектория полета больше не была вертикальной, и, во-вторых, она помещает ракету в правильный курс для ее подъема на орбиту. После питчовера угол атаки ракеты доводится до нуля на оставшуюся часть пути до орбиты. Такое обнуление угла атаки снижает боковые аэродинамические нагрузки и создает незначительную подъемную силу во время подъема. [1]
Ускорение вниз
[ редактировать ]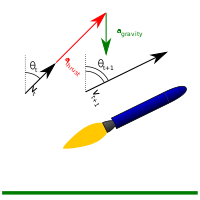
После кувырка траектория полета ракеты больше не является полностью вертикальной, поэтому сила тяжести поворачивает траекторию полета обратно к земле. Если бы ракета не создавала тяги, траектория полета представляла бы собой простой эллипс, подобный брошенному мячу (распространенная ошибка думать, что это парабола: это верно только в том случае, если предположить, что Земля плоская, а гравитация всегда направлены в одном направлении, что является хорошим приближением для коротких расстояний), выравнивается и затем падает обратно на землю. Однако ракета создает тягу, и вместо того, чтобы выровняться и затем снова снизиться, к моменту выравнивания ракета набирает достаточную высоту и скорость, чтобы вывести ее на стабильную орбиту.
Если ракета представляет собой многоступенчатую систему, в которой ступени срабатывают последовательно, горение ракеты при подъеме может не быть непрерывным. Между каждой последовательной ступеней должно быть выделено некоторое время для отделения ступеней и зажигания двигателя, но некоторые конструкции ракет требуют дополнительного времени свободного полета между ступенями. Это особенно полезно в ракетах с очень высокой тягой, где, если бы двигатели работали непрерывно, у ракеты кончилось бы топливо, прежде чем она выровнялась и достигла стабильной орбиты над атмосферой. [2] Этот метод также полезен при запуске с планеты с плотной атмосферой, такой как Земля. Поскольку сила тяжести меняет траекторию полета во время свободного полета, ракета может использовать меньший начальный угол тангажа, что придает ей более высокую вертикальную скорость и быстрее выводит ее из атмосферы. Это снижает как аэродинамическое сопротивление, так и аэродинамическое напряжение во время запуска. Затем во время полета ракета перемещается по инерции между срабатываниями ступеней, позволяя ей выровняться над атмосферой, поэтому, когда двигатель снова запускается, при нулевом угле атаки, тяга ускоряет корабль по горизонтали, выводя его на орбиту.
Порядок снижения и приземления
[ редактировать ]Поскольку тепловые щиты и парашюты нельзя использовать для приземления на безвоздушное тело, такое как Луна , хорошей альтернативой является механический спуск с гравитационным разворотом. использовал Лунный модуль «Аполлон» слегка модифицированный гравитационный разворот для приземления с лунной орбиты. По сути, это был обратный запуск, за исключением того, что приземляющийся космический корабль самый легкий на поверхности, а запускаемый космический корабль самый тяжелый на поверхности. Компьютерная программа под названием Lander, которая имитировала посадку с гравитационным разворотом, применила эту концепцию, моделируя запуск с гравитационным разворотом с отрицательным массовым расходом, то есть баками с топливом, заполненными во время горения ракеты. [4] Идея использования маневра гравитационного разворота для посадки аппарата изначально была разработана для приземления Lunar Surveyor , хотя Surveyor совершил прямой подход к поверхности без предварительного выхода на лунную орбиту. [5]
Свод с орбиты и вход
[ редактировать ]
Транспортное средство начинает с ориентации на ретроградное движение, чтобы уменьшить свою орбитальную скорость , опуская точку периапсиса почти до поверхности тела, на которое необходимо приземлиться. Если корабль приземляется на планету с такой атмосферой, как Марс, спуск с орбиты приведет только к понижению периапсиса в верхние слои атмосферы, а не чуть выше поверхности, как на безвоздушном теле. После завершения схода с орбиты аппарат может либо двигаться по инерции, пока не приблизится к месту приземления, либо продолжить работу двигателя, сохраняя нулевой угол атаки. Для планеты с атмосферой береговая часть путешествия включает вход через атмосферу также .
После выбега и возможного входа транспортное средство сбрасывает ненужные тепловые экраны и/или парашюты, готовясь к окончательному приземлению. Если атмосфера достаточно плотная, ее можно использовать для значительного замедления автомобиля, тем самым экономя топливо. В этом случае гравитационный разворот не является оптимальной траекторией входа, но он позволяет аппроксимировать требуемую истинную дельту-v . [6] Однако в случае отсутствия атмосферы посадочный аппарат должен обеспечить полную дельта-V, необходимую для безопасного приземления на поверхность.
Посадка
[ редактировать ]
Если транспортное средство еще не сориентировано должным образом, его двигатели выстраиваются так, чтобы стрелять прямо напротив текущего вектора скорости поверхности, который в этой точке либо параллелен земле, либо лишь слегка вертикальен, как показано слева. Затем транспортное средство запускает посадочный двигатель, чтобы замедлиться для приземления. По мере того, как транспортное средство теряет горизонтальную скорость, сила тяжести тела, на которое необходимо приземлиться, начнет подтягивать траекторию все ближе и ближе к вертикальному спуску. При идеальном маневре на идеально сферическом теле транспортное средство может одновременно достичь нулевой горизонтальной скорости, нулевой вертикальной скорости и нулевой высоты, благополучно приземлившись на поверхность (если тело не вращается; в противном случае горизонтальная скорость должна быть задана равной телу на рассматриваемой широте). Однако из-за камней и неровной поверхности транспортное средство обычно увеличивает угол атаки на несколько градусов ближе к концу маневра, чтобы обнулить свою горизонтальную скорость чуть выше поверхности. Этот процесс является зеркальным отражением маневра по тангажу, используемого в процедуре запуска, и позволяет аппарату зависать прямо вниз, мягко приземляясь на поверхность.
Руководство и контроль
[ редактировать ]Управление курсом ракеты во время полета разделено на два отдельных компонента; управление — возможность направить ракету в нужном направлении, а наведение — определение того, в каком направлении следует направить ракету, чтобы достичь заданной цели. Желаемой целью может быть либо местоположение на земле, как в случае с баллистической ракетой , либо определенная орбита, как в случае с ракетой-носителем.
Запуск
[ редактировать ]Траектория гравитационного разворота чаще всего используется во время раннего подъема. Программа наведения представляет собой заранее рассчитанную справочную таблицу зависимости шага от времени. Управление осуществляется с помощью подвески двигателя и/или аэродинамических рулей. Программа тангажа поддерживает нулевой угол атаки (определение гравитационного разворота) до тех пор, пока не будет достигнут космический вакуум, что минимизирует боковые аэродинамические нагрузки на аппарат. (Чрезмерные аэродинамические нагрузки могут быстро разрушить аппарат.) Хотя заранее запрограммированный график шага достаточен для некоторых применений, адаптивная инерциальная система наведения , определяющая местоположение, ориентацию и скорость с помощью акселерометров и гироскопов на современных ракетах почти всегда используется . Британская . спутниковая пусковая установка « Черная стрела » была примером ракеты, которая летала по заранее запрограммированному графику шага, не пытаясь исправить ошибки в своей траектории, в то время как ракеты «Аполлон-Сатурн» использовали инерциальное наведение «замкнутого контура» после гравитационного поворота в атмосфере . [7]
Программа начального шага представляет собой систему с разомкнутым контуром, подверженную ошибкам, связанным с ветром, изменениями тяги и т. д. Чтобы поддерживать нулевой угол атаки во время полета в атмосфере, эти ошибки не исправляются до достижения космоса. [8] Затем более сложная программа наведения с обратной связью может скорректировать отклонения траектории и достичь желаемой орбиты. В миссиях «Аполлон» переход к наведению по замкнутому контуру происходил в начале полета второй ступени после сохранения фиксированного инерционного положения при сбросе первой ступени и межступенчатого кольца. [8] Поскольку верхние ступени ракеты работают почти в вакууме, плавники неэффективны. Рулевое управление полностью зависит от подвески двигателя и системы управления реакцией .
Посадка
[ редактировать ]В качестве примера использования гравитационного разворота для механизированной посадки посадочный модуль будет рассмотрен типа «Аполлон» на безвоздушном корпусе. Посадочный модуль выходит на круговую орбиту, пристыкованный к командному модулю. После отделения от командного модуля посадочный модуль выполняет ретроградное вращение, чтобы опустить свой перицентр чуть выше поверхности. Затем он движется по инерции к перицентру, где двигатель перезапускается для выполнения гравитационного разворота. Показано, что в этой ситуации наведение может быть достигнуто за счет поддержания постоянного угла между вектором тяги и линией визирования на орбитальный командный модуль. [9] Этот простой алгоритм наведения основан на предыдущем исследовании, в котором изучалось использование различных визуальных сигналов наведения, включая восходящий горизонт, нижний горизонт, желаемое место посадки и орбитальный командный модуль. [10] Исследование пришло к выводу, что использование командного модуля обеспечивает наилучшую визуальную ориентировку, поскольку он поддерживает почти постоянное визуальное разделение от идеального гравитационного разворота до почти полного завершения приземления. Поскольку аппарат приземляется в вакууме, аэродинамические рули бесполезны. такую систему, как подвесной главный двигатель, систему управления реакцией или, возможно, гироскоп управляющего момента Следовательно, для управления ориентацией необходимо использовать .
Ограничения
[ редактировать ]Хотя траектории гравитационного разворота используют минимальную рулевую тягу, они не всегда являются наиболее эффективной процедурой запуска или посадки. Несколько факторов могут повлиять на процедуру гравитационного разворота, сделав ее менее эффективной или даже невозможной из-за конструктивных ограничений ракеты-носителя. Ниже приводится краткая информация о факторах, влияющих на разворот.
- Атмосфера . Чтобы минимизировать сопротивление силы тяжести, транспортное средство должно как можно скорее начать набирать горизонтальную скорость. На безвоздушном теле, таком как Луна, это не представляет проблемы, однако на планете с плотной атмосферой это невозможно. Существует компромисс между полетом выше перед началом ускорения вниз, что увеличивает потери на гравитационное сопротивление; или начать ускорение вниз раньше, уменьшив гравитационное сопротивление, но увеличив аэродинамическое сопротивление, испытываемое во время запуска.
- Максимальное динамическое давление . Еще одним эффектом, связанным с атмосферой планеты, является максимальное динамическое давление, оказываемое на ракету-носитель во время запуска. Динамическое давление связано как с плотностью атмосферы, так и со скоростью автомобиля в атмосфере. Сразу после старта аппарат набирает скорость и динамическое давление увеличивается быстрее, чем уменьшение плотности атмосферы может уменьшить динамическое давление. Это приводит к увеличению динамического давления, оказываемого на транспортное средство, до тех пор, пока обе скорости не станут равными. Это известно как точка максимального динамического давления (сокращенно « max Q »), и ракета-носитель должна быть сконструирована так, чтобы выдерживать такое напряжение во время запуска. Как и раньше, существует компромисс между гравитационным сопротивлением и необходимостью сначала лететь выше, чтобы избежать более плотной атмосферы при ускорении; или большее ускорение на меньшей высоте, что приводит к созданию более тяжелой ракеты-носителя из-за более высокого максимального динамического давления, испытываемого при запуске.
- двигателя Максимальная тяга . Максимальная тяга, которую может создать ракетный двигатель, влияет на несколько аспектов процедуры гравитационного разворота. Во-первых, перед маневром по тангажу машина должна быть способна не только преодолевать силу тяжести, но и ускоряться вверх. Чем больше ускорение транспортного средства превышает ускорение силы тяжести, тем более высокую вертикальную скорость можно получить, что позволяет снизить сопротивление силы тяжести на начальном этапе запуска. Когда выполняется наклон, автомобиль начинает фазу ускорения вниз; Тяга двигателя влияет и на эту фазу. Более высокая тяга также обеспечивает более быстрое ускорение до орбитальной скорости. Уменьшив это время, ракета сможет быстрее выровняться; дальнейшее снижение потерь на гравитационное сопротивление. Хотя более высокая тяга может сделать запуск более эффективным, слишком сильное ускорение низко в атмосфере увеличивает максимальное динамическое давление. Это можно облегчить, снова дросселируя двигатели в начале ускорения на спуске, пока автомобиль не поднимется выше. Однако с твердотопливными ракетами это может быть невозможно.
- Максимально допустимое ускорение полезной нагрузки . Еще одним ограничением, связанным с тягой двигателя, является максимальное ускорение, которое может безопасно выдерживать экипаж и/или полезная нагрузка. При отключении основного двигателя (MECO), когда ракета-носитель израсходует большую часть топлива, ракета будет намного легче, чем была при запуске. Если двигатели по-прежнему создают прежнюю тягу, ускорение будет расти в результате уменьшения массы автомобиля. Если это ускорение не контролировать путем дросселирования двигателей, это может привести к травмам экипажа или повреждению полезной нагрузки. Это заставляет транспортное средство тратить больше времени на набор горизонтальной скорости, увеличивая гравитационное сопротивление.
Использование при перенаправлении орбиты
[ редактировать ]Для миссий космических кораблей, где необходимы большие изменения направления полета, прямое движение космического корабля может оказаться невозможным из-за требований к большому перепаду v. В этих случаях можно совершить облет ближайшей планеты или луны, используя ее гравитационное притяжение для изменения направления полета корабля. Хотя этот маневр очень похож на гравитационную рогатку, он отличается тем, что рогатка часто предполагает изменение как скорости, так и направления, тогда как гравитационный поворот меняет только направление полета.
Вариант этого маневра, траектория свободного возврата, позволяет космическому кораблю отлететь от планеты, один раз облететь другую планету и вернуться на стартовую планету, используя двигательную установку только во время начального отлета. Хотя теоретически возможно выполнить идеальную траекторию свободного возврата, на практике во время полета часто необходимы небольшие корректирующие воздействия. Несмотря на то, что для обратного пути не требуется сжигание, другие типы обратных траекторий, такие как аэродинамический разворот, могут привести к более низкой общей дельта-v для миссии. [3]
Использование в космическом полете
[ редактировать ]Многие космические миссии использовали гравитационный разворот, либо напрямую, либо в модифицированной форме, для выполнения своих миссий. Ниже приводится краткий список различных миссий, которые использовали эту процедуру.
- Программа Surveyor . Основная цель программы Surveyor, предшествовавшая программе «Аполлон», заключалась в разработке возможности выполнять мягкую посадку на поверхность Луны посредством использования программы автоматического спуска и посадки, встроенной в посадочный модуль. [11] Хотя процедуру приземления можно классифицировать как спуск с гравитационным разворотом, она отличается от наиболее часто используемой техники тем, что ее запускали с Земли непосредственно на поверхность Луны, а не сначала вращались вокруг Луны, как это делали посадочные аппараты Аполлона. Из-за этого траектория снижения была почти вертикальной, хотя при приземлении произошел некоторый «поворот» под действием силы тяжести. [12]
- Программа «Аполлон» . Запуски ракеты «Сатурн-5» в рамках программы «Аполлон» осуществлялись с использованием гравитационного разворота, чтобы минимизировать боковую нагрузку на ракету. На другом конце своего пути лунные корабли использовали гравитационный разворот, приземляясь и поднимаясь с Луны.
Математическое описание
[ редактировать ]Простейшим случаем траектории гравитационного разворота является тот, который описывает транспортное средство точечной массы в однородном гравитационном поле без учета сопротивления воздуха. Сила тяги представляет собой вектор, величина которого является функцией времени и направление которого можно изменять по желанию. При этих предположениях дифференциальное уравнение движения имеет вид:


Здесь - единичный вектор в вертикальном направлении и – мгновенная масса транспортного средства. Ограничивая вектор тяги точкой, параллельной скорости, и разделяя уравнение движения на компоненты, параллельные скорости. и те, которые перпендикулярны мы приходим к следующей системе: [13]




Здесь текущая тяговооруженность обозначена через и текущий угол между вектором скорости и вертикалью на . В результате получается связанная система уравнений, которую можно проинтегрировать для получения траектории. Однако для всех случаев, кроме простейшего случая постоянной на протяжении всего полета уравнения не могут быть решены аналитически и должны интегрироваться численно .



Ссылки
[ редактировать ]- ^ Jump up to: а б с д Гласстоун, Сэмюэл (1965). Справочник по космическим наукам . Д. Ван Ностранд Компания, Инк., стр. 209 или §4.97.
- ^ Jump up to: а б Каллауэй, Дэвид В. (март 2004 г.). «Копланарный воздушный старт с траекториями запуска с гравитационным разворотом» (PDF) . Магистерская диссертация . Архивировано из оригинала (PDF) 28 ноября 2007 г.
- ^ Jump up to: а б Луиденс, Роджер В. (1964). «Безостановочные траектории полета туда и обратно к Марсу» . Американский институт аэронавтики и астронавтики . 2 (2): 368–370. Бибкод : 1964AIAAJ...2..368L . дои : 10.2514/3.2330 . hdl : 2060/19640008410 .
- ^ Eagle Engineering, Inc (30 сентября 1988 г.). «Руководство по программе посадочного модуля». Номер контракта НАСА NAS9-17878 . Отчет EEI 88-195. hdl : 2060/19890005786 .
- ^ «Разработка спутника Boeing: обзор исследовательской миссии» . boeing.com . Боинг. Архивировано из оригинала 7 февраля 2010 года . Проверено 31 марта 2010 г.
- ^ Браун, Роберт Д.; Мэннинг, Роберт М. (2006). Проблемы входа, спуска и посадки на Марс (PDF) . Аэрокосмическая конференция IEEE. п. 1. дои : 10.1109/AERO.2006.1655790 . ISBN 0-7803-9545-Х . Архивировано из оригинала (PDF) 3 сентября 2006 г.
- ^ «Справочник по ракетам-носителям. Сбор данных о характеристиках и массе ракет-носителей для целей предварительного планирования» . Технический меморандум НАСА . ТМ 74948. Сентябрь 1961 г.
- ^ Jump up to: а б «Описание систем Аполлона. Том 2 - Ракеты-носители Сатурна». Технический меморандум НАСА . ТМ Х-881. Февраль 1964 г. hdl : 2060/19710065502 .
- ^ Баркер, Л. Кейт (декабрь 1964 г.). «Применение техники приземления на Луну для посадки с эллиптической орбиты, установленной с помощью трансфера Гомана». Техническое примечание НАСА . ТН Д-2520. hdl : 2060/19650002270 .
- ^ Баркер, Л. Кейт; Кейхо, MJ (июнь 1964 г.). «Методика ориентации вектора тяги при ручном управлении посадкой на Луну с синхронной орбиты». Техническое примечание НАСА . ТН Д-2298. hdl : 2060/19640013320 .
- ^ Турман, Сэм В. (февраль 2004 г.). «Сервейер» Система автоматической посадки космического корабля . 27-я ежегодная конференция по руководству и контролю ААС. Архивировано из оригинала 27 февраля 2008 г.
- ^ Турман, Сэм В. (2004). Система автоматической посадки космического корабля Surveyor (Репортаж). НАСА. п. 6. HDL : 2014/38026 . Проверено 14 мая 2023 г.
- ^ Каллер, Глен Дж.; Фрид, Бертон Д. (июнь 1957 г.). «Универсальные траектории гравитационного разворота» . Журнал прикладной физики . 28 (6): 672–676. Бибкод : 1957JAP....28..672C . дои : 10.1063/1.1722828 .
Гравитационные орбиты |
|---|