Активная матрица с электронным сканированием
Эта статья нуждается в дополнительных цитатах для проверки . ( апрель 2015 г. ) |

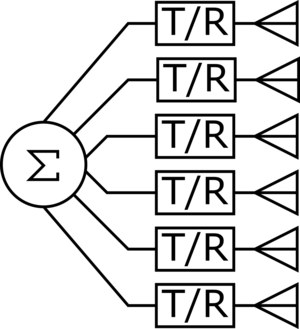
Активная решетка с электронным сканированием ( AESA ) — это тип фазированной с компьютерным управлением антенной решетки, которая представляет собой антенную решетку , в которой луч радиоволн может управляться электронным способом так, чтобы он был направлен в разных направлениях без перемещения антенны. [1] В АФАР каждый антенный элемент подключен к небольшому полупроводниковому приемопередающему модулю (TRM) под управлением компьютера, который выполняет функции передатчика и /или приемника антенны. Это контрастирует с пассивной решеткой с электронным сканированием (PESA), в которой все элементы антенны подключены к одному передатчику и/или приемнику через фазовращатели под управлением компьютера. Основное применение AESA приходится на радары , известные как радары с активной фазированной антенной решеткой (APAR).
AESA — это более продвинутое и сложное второе поколение оригинальной технологии фазированных решеток PESA. PESA могут одновременно излучать только один луч радиоволн на одной частоте. PESA должна использовать матрицу Батлера, если требуется несколько лучей. AESA может одновременно излучать несколько лучей радиоволн на нескольких частотах. Радары AESA могут распространять свои сигналы в более широком диапазоне частот, что затрудняет их обнаружение на фоне фонового шума , позволяя кораблям и самолетам излучать мощные радиолокационные сигналы, оставаясь при этом скрытными, а также более устойчивыми к помехам. Также можно найти гибриды AESA и PESA, состоящие из подмассивов, которые по отдельности напоминают PESA, где каждый подмассив имеет свой собственный RF-интерфейс . Используя гибридный подход, преимущества AESA (например, несколько независимых лучей) могут быть реализованы при меньших затратах по сравнению с чистым AESA.
История [ править ]
Примеры и перспективы в этом разделе могут не отражать мировую точку зрения на предмет . ( Ноябрь 2015 г. ) |



Bell Labs предложила заменить радары Nike Zeus системой с фазированной решеткой в 1960 году и получила добро на разработку в июне 1961 года. Результатом стал многофункциональный радар с решеткой Zeus (ZMAR), ранний пример активного электронного радара. радиолокационная система с управляемой решеткой. [2] ZMAR стал MAR, когда в 1963 году программа Zeus завершилась в пользу системы Nike-X. MAR (Многофункциональный радар с решеткой) состоял из большого количества небольших антенн, каждая из которых была подключена к отдельному передатчику или приемнику, управляемому компьютером. . Используя различные этапы формирования луча и обработки сигналов , одиночный MAR мог выполнять обнаружение на большом расстоянии, генерацию треков, распознавание боеголовок от ложных целей и отслеживание исходящих ракет-перехватчиков. [3]
MAR позволял контролировать весь бой на большом пространстве с одного места. Каждый MAR и связанный с ним боевой центр будут обрабатывать треки сотен целей. Затем система выберет наиболее подходящую батарею для каждой из них и передаст им для атаки определенные цели. Одна батарея обычно связана с MAR, а другие располагаются вокруг нее. Удаленные батареи были оснащены гораздо более простым радаром, основной целью которого было отслеживание вылетающих ракет «Спринт» до того, как они станут видимыми для потенциально удаленной MAR. Эти меньшие радары ракетных площадок (MSR) пассивно сканировались, образуя только один луч вместо нескольких лучей MAR. [3]
Хотя MAR в конечном итоге оказался успешным, стоимость системы была огромной. Когда проблема ПРО стала настолько сложной, что даже такая система, как MAR, больше не могла справляться с реалистичными сценариями атак, от концепции Nike-X отказались в пользу гораздо более простых концепций, таких как программа Sentinel , которая не использовала MAR. Второй экземпляр, MAR-II, был брошен на месте на атолле Кваджалейн . [4]
Первый советский АФАР — 5Н65 — был разработан в 1963—1965 годах в составе системы ПРО С-225. После некоторых изменений в концепции системы в 1967 году она была построена на Сары-Шаган полигоне была построена еще одна РЛС этой конструкции в 1970-1971 годах и получила на Западе прозвище Flat Twin. Четыре года спустя на полигоне Кура , а система С-225 так и не была введена в эксплуатацию. [ нужна ссылка ]
- Первой военной АФАР наземного базирования была J/FPS-3 , которая вступила в полную боевую готовность 45-й группы управления и предупреждения самолетов Сил самообороны Японии в 1995 году.
- Первой серийно выпускаемой АФАР корабельного базирования была OPS-24 — радар управления огнем , установленный на японском «Асагири» эсминце класса DD-155 «Хамагири», спущенном на воду в 1988 году. [5]
- Первой серийной бортовой АФАР стала EL/M-2075 Phalcon на самолете Boeing 707 ВВС Чили , поступившая на вооружение в 1994 году.
- Первой АФАР на боевом самолете была J/APG-1, установленная на Mitsubishi F-2 в 1995 году. [6]
- Первой АФАР на ракете является головка ГСН для AAM-4B , ракеты класса «воздух-воздух», установленной на самолетах Mitsubishi F-2 и построенных Mitsubishi McDonnell-Douglas F-15J. [6]
В число американских производителей радаров AESA, используемых в F-22 и Super Hornet, входит Northrop Grumman. [7] и Рэйтеон. [8] Эти компании также проектируют, разрабатывают и производят модули передачи/приема, которые составляют «строительные блоки» радара AESA. Необходимая электронная технология была разработана собственными силами в рамках исследовательских программ Министерства обороны, таких как программа MMIC . [9] [10] В 2016 году Конгресс профинансировал конкурс военной промышленности на производство новых радаров для двух десятков истребителей Национальной гвардии. [11]
Основная концепция [ править ]
Радарные системы обычно работают путем подключения антенны к мощному радиопередатчику для излучения короткого импульса сигнала. Затем передатчик отключается, а антенна подключается к чувствительному приемнику, который усиливает любые эхо-сигналы от целевых объектов. Измеряя время, необходимое для возвращения сигнала, приемник радара может определить расстояние до объекта. Затем получатель отправляет полученный результат на какой-либо дисплей . Передающими элементами обычно были клистронные трубки или магнетроны , которые подходят для усиления или генерации узкого диапазона частот до высоких уровней мощности. Чтобы сканировать часть неба, антенну радара необходимо физически перемещать в разных направлениях.
Начиная с 1960-х годов были представлены новые полупроводниковые устройства, способные контролируемо задерживать сигнал передатчика. Это привело к созданию первой практической крупномасштабной пассивной антенной решетки с электронным сканированием (PESA), или просто радара с фазированной решеткой. PESA брали сигнал из одного источника, разделяли его на сотни путей, избирательно задерживали некоторые из них и отправляли на отдельные антенны. Радиосигналы от отдельных антенн перекрывались в пространстве, а интерференционная картина между отдельными сигналами контролировалась так, чтобы усиливать сигнал в определенных направлениях и приглушать его во всех остальных. Задержками можно было легко управлять с помощью электроники, что позволяло очень быстро управлять лучом, не перемещая антенну. PESA может сканировать объем пространства гораздо быстрее, чем традиционная механическая система. Кроме того, благодаря прогрессу в электронике, PESA добавили возможность создавать несколько активных лучей, что позволяет им продолжать сканировать небо, в то же время фокусируя более мелкие лучи на определенных целях для отслеживания или наведения. ракеты с полуактивным радиолокационным самонаведением . PESA быстро получили широкое распространение на кораблях и крупных стационарных огневых точках в 1960-х годах, за ними последовали бортовые датчики, когда количество электроники сократилось.
AESA являются результатом дальнейшего развития твердотельной электроники. В более ранних системах передаваемый сигнал изначально создавался в клистроне, трубке бегущей волны или аналогичном устройстве, которые были относительно большими. Электроника приёмника также была большой из-за высоких частот, с которыми она работала. Внедрение микроэлектроники на основе арсенида галлия в 1980-х годах позволило значительно уменьшить размеры приемных элементов до тех пор, пока не удалось создать эффективные элементы размером, аналогичным размерам портативных радиоприемников, всего лишь несколько кубических сантиметров в объеме. Внедрение JFET и MESFET сделало то же самое и с передающей стороной систем. Это привело к появлению усилителей-передатчиков с маломощным полупроводниковым генератором сигналов, питающим усилитель, что позволило любому радару, оборудованному таким образом, вести передачу в гораздо более широком диапазоне частот, вплоть до изменения рабочей частоты с каждым отправленным импульсом. Сжатие всей сборки (передатчик, приемник и антенна) в единый «модуль передатчика-приемника» (TRM) размером с коробку молока и расположение этих элементов в ряд позволяет получить АФАР.
Основным преимуществом AESA перед PESA является способность разных модулей работать на разных частотах. В отличие от PESA, где сигнал генерируется на отдельных частотах небольшим количеством передатчиков, в AESA каждый модуль генерирует и излучает собственный независимый сигнал. Это позволяет AESA одновременно создавать множество «подлучей», которые она может распознавать благодаря разным частотам, и активно отслеживать гораздо большее количество целей. AESA также может создавать лучи, состоящие из множества разных частот одновременно, используя постобработку объединенного сигнала от нескольких TRM для воссоздания изображения, как если бы был отправлен один мощный луч. Однако это означает, что шум, присутствующий на каждой частоте, также принимается и добавляется.
Преимущества [ править ]
AESA добавляют к PESA множество собственных возможностей. Среди них: способность формировать несколько лучей одновременно, одновременно использовать группы TRM для разных целей, таких как обнаружение радаров, и, что более важно, их несколько одновременных лучей и частоты сканирования создают трудности для традиционных радар-детекторов корреляционного типа.
перехвата вероятность Низкая
Радарные системы работают, посылая сигнал, а затем прослушивая его эхо от удаленных объектов. Каждый из этих путей, к цели и от цели, подчиняется закону обратных квадратов распространения как передаваемого сигнала, так и отраженного обратно сигнала. Это означает, что получаемая радаром энергия падает с четвертой степенью расстояния, поэтому радиолокационным системам требуются высокие мощности, часто в мегаваттном диапазоне, чтобы быть эффективными на больших расстояниях.
Отправляемый радиолокационный сигнал представляет собой простой радиосигнал и может быть принят простым радиоприемником . Военные самолеты и корабли имеют защитные приемники, называемые « приемниками радиолокационного предупреждения » (RWR), которые определяют, когда на них попадает луч радара противника, тем самым раскрывая положение противника. В отличие от радара, который должен посылать импульс, а затем принимать его отражение, приемнику цели не требуется отражение, и поэтому сигнал падает только пропорционально квадрату расстояния. Это означает, что приемник всегда имеет преимущество (пренебрегая разницей в размере антенны) перед радаром с точки зрения дальности - он всегда сможет обнаружить сигнал задолго до того, как радар сможет увидеть эхо цели. Поскольку положение радара является чрезвычайно полезной информацией при атаке на эту платформу, это означает, что радары обычно должны быть отключены на длительные периоды времени, если они подвергаются атаке; это часто встречается, например, на кораблях.
В отличие от радара, который знает, в каком направлении он посылает сигнал, приемник просто получает импульс энергии и должен его интерпретировать. Поскольку радиоспектр заполнен шумом, сигнал приемника интегрируется за короткий период времени, в результате чего периодические источники, такие как радар, складываются и выделяются на случайном фоне. Примерное направление можно рассчитать с помощью вращающейся антенны или аналогичной пассивной решетки, используя сравнение фазы или амплитуды . Обычно RWR хранят обнаруженные импульсы в течение короткого периода времени и сравнивают частоту их передачи и частоту повторения импульсов с базой данных известных радаров. Направление на источник обычно сочетается с символикой, указывающей вероятное назначение радара – бортовое дальнее обнаружение и управление , ракета класса «земля-воздух» и т. д.
Этот метод гораздо менее полезен против радара с перестраиваемым по частоте (твердотельным) передатчиком. Поскольку AESA (или PESA) может менять свою частоту с каждым импульсом (кроме случаев использования доплеровской фильтрации) и обычно делает это с использованием случайной последовательности, интегрирование по времени не помогает выделить сигнал из фонового шума. Более того, радар может быть спроектирован таким образом, чтобы увеличить длительность импульса и снизить его пиковую мощность. AESA или современное PESA часто имеют возможность изменять эти параметры во время работы. Это не влияет на общую энергию, отраженную целью, но снижает вероятность обнаружения импульса системой RWR. [12] АФАР также не имеет какой-либо фиксированной частоты повторения импульсов, которую также можно изменять и, таким образом, скрывать любое периодическое увеличение яркости по всему спектру. RWR старого поколения по сути бесполезны против радаров с АФАР, поэтому АФАР также известны как радары с низкой вероятностью перехвата . Современные РВР необходимо сделать высокочувствительными (малые углы и полосы пропускания для отдельных антенн, низкие потери передачи и шумы) [12] и добавьте последовательные импульсы посредством частотно-временной обработки для достижения полезной скорости обнаружения. [13]
Высокая устойчивость к помехам [ править ]
Постановка помех против АФАР также намного сложнее. Традиционно постановщики помех действовали, определяя рабочую частоту радара и затем передавая на него сигнал, чтобы сбить с толку приемник относительно того, какой импульс является «настоящим», а какой принадлежит постановщику помех. Этот метод работает до тех пор, пока радиолокационная система не может легко изменить свою рабочую частоту. Когда передатчики были основаны на клистронных трубках, это в целом было правдой, и радары, особенно бортовые, имели лишь несколько частот на выбор. Глушитель мог прослушивать эти возможные частоты и выбирать ту, которая будет использоваться для глушения.
Большинство радаров, использующих современную электронику, способны менять свою рабочую частоту с каждым импульсом. Это может сделать глушение менее эффективным; хотя можно посылать широкополосный белый шум для проведения заградительных помех на всех возможных частотах, это уменьшает количество энергии помех на любой одной частоте. AESA имеет дополнительную возможность распределять свои частоты по широкой полосе частот даже за один импульс - метод, известный как «чип». В этом случае помехи будут той же частоты, что и радар, лишь на короткий период времени, а остальная часть радиолокационного импульса не будет помеховой.
AESA также можно переключить в режим только приема и использовать эти мощные сигналы помех для отслеживания их источника, для чего на старых платформах требовался отдельный приемник. Интегрируя полученные сигналы от собственного радара цели вместе с более низкой скоростью передачи данных из собственных передач, система обнаружения с точным RWR, такая как AESA, может генерировать больше данных с меньшими затратами энергии. Некоторые приемные системы с возможностью формирования луча, обычно наземные, могут даже полностью отказаться от передатчика.
Однако использование одной приемной антенны дает только направление. Для получения дальности и целевого вектора требуется как минимум два физически отдельных пассивных устройства для триангуляции , чтобы обеспечить мгновенные определения, если не фазовая интерферометрия используется . Анализ движения цели может оценить эти величины путем включения множества измерений направления с течением времени, а также знаний о положении приемника и ограничений на возможное движение цели.
Другие преимущества [ править ]
Поскольку каждый элемент АФАР представляет собой мощный радиоприемник, активные решетки выполняют множество функций, помимо традиционного радара. Одним из вариантов использования является выделение нескольких элементов для приема обычных радиолокационных сигналов, что устраняет необходимость в отдельном приемнике радиолокационных предупреждений. Та же основная концепция может быть использована для обеспечения традиционной радиоподдержки, а с некоторыми элементами также и для радиовещания, для формирования с очень высокой пропускной способностью канала передачи данных . F-35 использует этот механизм для передачи данных датчиков между самолетами, чтобы обеспечить синтетическую картину с более высоким разрешением и дальностью, чем может создать любой один радар. В 2007 году испытания, проведенные компаниями Northrop Grumman , Lockheed Martin и L-3 Communications, позволили системе AESA Raptor действовать как точка доступа Wi-Fi , способная передавать данные со скоростью 548 мегабит в секунду и принимать на гигабитной скорости; это намного быстрее, чем система Link 16, используемая самолетами США и их союзников, которая передает данные со скоростью чуть более 1 Мбит/с. [14] Для достижения таких высоких скоростей передачи данных требуется узконаправленная антенна, которую обеспечивает AESA, но которая исключает прием другими устройствами, находящимися за пределами ширины луча антенны, тогда как, как и большинство конструкций Wi-Fi, Link-16 передает свой сигнал всенаправленно, чтобы гарантировать, что все устройства находятся в радиусе действия. может получить данные.
AESA также намного более надежны, чем PESA или старые конструкции. Поскольку каждый модуль работает независимо от остальных, единичные сбои мало влияют на работу системы в целом. Кроме того, модули по отдельности работают при низкой мощности, возможно, от 40 до 60 Вт, поэтому отпадает необходимость в большом высоковольтном источнике питания.
Замена антенной решетки с механическим сканированием на фиксированную установку AESA (например, на Boeing F/A-18E/F Super Hornet (ЭПР) самолета ) может помочь уменьшить общую радиолокационную эффективность , но некоторые конструкции (например, Eurofighter Typhoon и Eurofighter Typhoon и Gripen NG ) отказались от этого преимущества, чтобы совместить механическое сканирование с электронным и обеспечить более широкий угол общего охвата. [15] Такое наведение вне носа позволяет истребителю, оснащенному AESA, использовать маневр пересечения Т-образной формы , часто называемый «лучением» в контексте боя воздух-воздух, против радара с механическим сканированием, который отфильтровывает низкую скорость сближения. перпендикулярного полета как помехи от земли, в то время как АФАР поворачивается на 40 градусов к цели, чтобы удержать ее в пределах предела угла отклонения АФАР в 60 градусов. [16]
Ограничения [ править ]
При расстоянии между элементами в половину длины волны максимальный угол луча составляет примерно °. При более коротком расстоянии элемента максимальное поле зрения (FOV) для плоской фазированной антенной решетки в настоящее время составляет 120 ° ( °), [17] хотя это можно комбинировать с механическим рулевым управлением, как отмечалось выше. [18] [19]


Список существующих систем [ править ]
Бортовые системы [ править ]
- Аселсан
- МУРАД, для Байкар Байрактар Акынджи , F-16 и TAI TF-X Каан
- Captor-E CAESAR (РЛС с активной сканирующей решеткой CAPTOR) для истребителя Eurofighter Typhoon

- Организация оборонных исследований и разработок
- DRDO LSTAR — РЛС для платформы дальнего радиолокационного обнаружения.
- Uttam AESA Многофункциональный радар для HAL Tejas
- Многофункциональная РЛС «Вирупаакша» для Су-30МКИ — усовершенствованный вариант АФАР «Уттам».
- Эльта Системс
- EL/M-2083 аэростате РЛС воздушного поиска на
- EL/M-2052 , для истребителей. Временный кандидат в HAL Tejas . Подходит для F-15 , МиГ-29 , Мираж 2000 , FA-50 Block 20 .
- РЛС EL/M-2075 для IAI Phalcon AEW&C системы
- EL/W-2085 Усовершенствованная версия радара для EL/M-2075, используемого на Gulfstream G550.
- EL/W-2090 аналогичен EL/W-2085, используется только на Ил-76.
- Эрикссон
- Ханва Системы
- РЛС KF-21 для КАИ KF-21 Boramae
- ЛИГ Некс1
- РЛС воздушного охлаждения ESR-500A, примерно эквивалент Raytheon PhamtomStrike, вариант для KAI FA-50 Block 20.
- Мицубиси Электрик Корпорейшн
- J/APG-1 АФАР Mitsubishi F-2 /J/APG-2 для истребителя
- HPS-104 для Mitsubishi SH-60
- Многофункциональный радиочастотный датчик для Mitsubishi ATD-X
- Нортроп Грумман
- AN/APG-77 для F-22 Raptor
- AN/APG-80 для General Dynamics F-16 Fighting Falcon
- AN/APG-81 для F-35 Lightning II
- AN/APG-83 для модернизации F-16V Viper и B-1B Lancer .
- AN/APG-85 для F-35 Lightning II (Блок 4)
- AN/APY-9 для E-2D Advanced Hawkeye
- Многоцелевая решетка с электронным сканированием (MESA) для Boeing E-7 Wedgetail
- Радиолокационная станция с АФАР AN/ASQ-236
- Малый тактический радар AN/ZPY-1 STARLite — легкий, для пилотируемых и беспилотных самолетов.
- AN/ZPY-2 Программа внедрения многоплатформенной радиолокационной технологии (MP-RTIP)
- Многофункциональный активный датчик (MFAS) AN/ZPY-3 для MQ-4C Triton
- NRIET (Нанкинский научно-исследовательский институт электронных технологий / 14 институтов), 607 институтов и 38 институтов
- РЛС для KJ-2000 ДРЛО системы [20]
- РЛС для ДРЛО KJ-500 и Y-7
- РЛС для KJ-200 [20]
- KLJ-7A для JF-17 Thunder Block 3
- ЗДК-03
- РЛС Тип 1475 для Чэнду J-20
- Чэнду J-10B/C [21]
- Шэньян J-16 [22]
- Z-8AEW
- Радар для демонтажа и эксплуатации автомобиля (VADER)
- Фазотрон НИИР
- Рейтеон
- AN/APG-63(V)2 и AN/APG-63(V)3 для F-15C Eagle , Республики Сингапур . F-15SG
- AN/APG-79 для F/A-18E/F Super Hornet и EA-18G Growler.
- AN/APG-82(V)1 для F-15E Strike Eagle и F-15EX Eagle II
- AN/APG-84 RACR (усовершенствованный боевой радар Raytheon) для модификаций F-16 и F/A-18.
- AN/APQ-181 Модернизация с PESA до AESA для Northrop Grumman B-2 Spirit бомбардировщика
- AN/APS-154 AAS (усовершенствованный бортовой датчик), AESA, являющийся продолжением LSRS (прибрежной радиолокационной системы наблюдения), AN/APS-149 . Также для Boeing P-8 Poseidon.
- РЛС с АФАР воздушного охлаждения PhantomStrike для FA-50 Block 20 .
- Raytheon Sentinel ASTOR (бортовой радиолокационный радар)
- Ты можешь
- Selex ES (ныне Леонардо )
- ПикоСАР [24]
- Ворон ES-05 АФАР [25] для JAS-39E Gripen NG [26]
- Морской спрей 5000E [27]
- Морской спрей 7000E, [28] для вертолетов
- Морской спрей 7500E [29] для General Atomics MQ-9 Reaper
- Виксен 500E [30]
- Виксен 1000E [31]
- RBE2 -AESA для Rafale истребителя
- Tikhomirov NIIP
- Н036 Белка , для Су-57.
- Фалес

- Тошиба
- HPS-106, РЛС воздушного и надводного поиска, для морского патрульного самолета Kawasaki P-1 , три антенные решетки.
- Радиотехническая корпорация «Вега» -
- РЛС для Бериева А-100
Наземные системы (сухопутные, морские) [ править ]
Первым радаром с АФАР, примененным на боевом корабле, был японский OPS-24 производства Mitsubishi Electric, представленный на JDS Hamagiri (DD-155), первом корабле последней партии эсминца класса Asagiri , спущенном на воду в 1988 году.
- APAR (радар с активной фазированной антенной решеткой): многофункциональный радар Thales Нидерланды является основным датчиком фрегатов класса De Zeven Provinciën ВМС Германии Королевского флота Нидерландов, фрегатов класса Sachsen и фрегатов класса Ivar Huitfeldt Королевского флота Дании . APAR — первый многофункциональный радар с активной решеткой с электронным сканированием, используемый на боевом корабле. [32]
- БАЕ Системы
- Многофункциональный радар SAMPSON для британских эсминцев Type 45
- Многофункциональный радар ARTISAN Type 997 для британских фрегатов Type 23 и Type 26 и класса Queen Elizabeth . авианосцев
- Бхарат Электроникс
- Кассидиан
- BÜR — наземная РЛС наблюдения фирмы Cassidian , для Бундесвера
- COBRA Контрбатарейный радар
- ТРС-4Д
- СЕА Технологии
- CEAFAR - многофункциональный цифровой радар с активной фазированной решеткой 4-го поколения S-диапазона, установленный на всех фрегатах класса RAN ANZAC.
- Китай
- Дорожно-мобильный «Анти-Стелс» JY-26 «Skywatch-U» 3-D радар воздушного наблюдения дальнего действия. [34]
- H/LJG-346(8) на китайском авианосце Ляонин
- H/LJG-346 на эсминце Тип 052C
- H/LJG-346A на эсминце Тип 052D
- H/LJG-346B на эсминце Тип 055
- РЛС Тип 305А (РЛС обнаружения для ракетного комплекса HQ-9 ) [35]
- YLC-2 Радар [36]
- Организация оборонных исследований и разработок
- Ashwini LLTR Radar - радар 4D AESA (используется ВВС Индии). [37]
- Радар Арудхра - многофункциональный радар с АФАР (используется ВВС Индии). [38]
- Радар дальнего слежения Swordfish - радар обнаружения целей и управления огнем для противоракетной обороны . индийской системы
- РЛС тактического управления ПВО (ADTCR) — РЛС тактического управления. [39]
- Радар управления огнем ПВО Атуля (ADFCR) — трехмерный радар управления огнем X-диапазона. [40]

- Гнаться
- EL/M-2080 Green Pine Наземная РЛС дальнего обнаружения с АФАР
- EL/M-2106 ATAR РЛС управления огнем ПВО
- EL/M-2180 - Многорежимный радар наблюдения за землей WatchR Guard
- EL/M-2248 MF-STAR Многофункциональная морская РЛС
- EL/M-2258 с усовершенствованной легкой фазированной решеткой «АЛЬФА» Многофункциональный военно-морской радар
- Многоцелевая РЛС ЭЛ/М-2084 (локация артиллерийских средств, ПВО и управление огнем)
- EL/M-2133 WindGuard - Trophy РЛС системы активной защиты
- Хенсольдт
- Ларсен и Тубро
- Радиолокационная система управления огнем ПВО - радар 3D наблюдения. [44]
- ЛИГ Некс1
- СПС-550К РЛС воздушного и надводного наблюдения средней дальности для фрегатов класса «Инчхон» и фрегатов класса «Тэгу»
- Локхид Мартин
- AN/TPQ-53 Радиолокационная станция обнаружения целей противодействия
- AN/SPY-7 Радар дискриминации дальнего действия
- AN/MPQ-64A4 Страж
- AN/TPY-4 3DELRR Трехмерный экспедиционный радар дальнего действия [45]

- MEADS Радар управления огнем
- Мицубиси Электрик Корпорейшн
- Тип 3 (Чу-САМ, ЗУР-4) Многофункциональная РЛС Зенитного ракетного комплекса средней дальности
- OPS-24 (первая в мире военно-морская РЛС с активной решеткой электронного сканирования) на эсминцах класса Асагири , эсминцах класса Мурасаме (1994 г.) и эсминцах класса Таканами
- ОПС-50 ( FCS-3 ) на эсминце вертолетного типа «Хюга» , эсминце вертолетного типа «Идзумо» и эсминце класса «Акидзуки» (2010 г.)
- J/FPS-3 основная наземная система ПВО Японии
- J/FPS-5 Японский наземный радар противоракетной обороны нового поколения
- JTPS-P14 Переносная РЛС ПВО
- JTPS-P16 Контрбатарейная РЛС
- Национальный институт науки и технологий Чунг-Шаня
- Глаз орлана - Многофункциональный радар с АФАР [46]
- НЭК
- J/TPS-102 Самоходный наземный радар с цилиндрической антенной решеткой.
- ННИИРТ 1Л119 «Небо СВУ» Мобильная РЛС трехмерного обзора с АФАР
- Нортроп Грумман
- РАДА Электронная промышленность [47]

- Рейтеон
- FlexDAR Гибкий радар с распределенной решеткой
- Национальной противоракетной обороны США РЛС морского базирования X-диапазона (XBR)
- AN/TPY-2 Радар противоракетной обороны THAAD. , который может работать отдельно или быть частью системы ПРО
- Многофункциональная РЛС AN/SPY-3 для США DD(X) и CVN-21 надводных кораблей нового поколения
- Многофункциональный радар противовоздушной и противоракетной обороны AN/SPY-6 (AMDR) для американских «Арли Берк» эсминцев и «Джеральд Р. Форд» типа авианосца
- Замена Джуди Кобры (CJR) / Король Кобры на USNS Howard O. Lorenzen (T-AGM-25)
- AN/FPS-132 Модернизированный радар раннего предупреждения (UEWR) — PAVE PAWS с PESA до AESA обновление
- КурФС [48]
- Группа Сааб
- Селекс ES
- КРОНОС Лэнд [50] и военно-морской флот [51] 3D многофункциональный радар
- РАН-40Л 3D РЭВ
- КРЫС-31ДЛ
- РАТ-31ДЛ/М
- Фалес

- ThalesRaytheonSystems
- М3Р
- Тошиба
- J/FPS-4 дешевле, чем J/FPS-3, производства Toshiba.
- Контрбатарейная РЛС JMPQ-P13, Toshiba
- Мобильная трехмерная твердотельная обзорная РЛС с АФАР ВНИИРТ «Гамма ДЭ»
- Многофункциональная РЛС 50Н6А ракетного комплекса «Витязь » и 42С6 « Морфей » («Морфеус»)
См. также [ править ]
- Конфигурации и типы радаров
- Получатель
- Пассивная матрица с электронным сканированием
- Низкая вероятность перехвата радара
- Радар слежения за местностью
- Твердотельная радиолокационная система с фазированной решеткой
Ссылки [ править ]
- ^ Безумная инженерия F-35B , получено 16 февраля 2024 г.
- ^ Bell Labs 1975 , с. И-35.
- ^ Jump up to: Перейти обратно: а б Bell Labs 1975 , с. 2-3.
- ^ Bell Labs 1975 , с. 2-22.
- ^ Томохико Тада (март 2010 г.). «4. Радар/РЭБ/РЭБ (Корабельное вооружение JMSDF 1952-2010 гг.)». Корабли мира (на японском языке) (721). Кайдзин-ша: 100–105.
- ^ Jump up to: Перейти обратно: а б «Япония модернизирует 60 F-2 с помощью AAM-4, J/APG-2» . Проверено 17 июня 2015 г.
- ^ «Northrop Grumman успешно завершила сертификацию летных испытаний радара F-22 (NYSE:NOC)» . Проверено 17 июня 2015 г.
- ^ Корпоративные коммуникации Raytheon. «Райтеон» . Архивировано из оригинала 7 июля 2008 г. Проверено 17 июня 2015 г.
- ^ «Взгляд DARPA на будущее электроники» (PDF) . Архивировано из оригинала (PDF) 26 сентября 2007 года.
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 26 сентября 2007 г. Проверено 18 августа 2007 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Албон, Кортни. «Обеспокоенность по поводу промышленной базы: сенатские присваиватели призывают к более широкой модернизации радара F-16 с AESA». Внутри ВВС , вып. 26, нет. 23, Inside Washington Publishers, 2015, стр. 3–3, веб-сайт JSTOR . Проверено 13 марта 2022 г.
- ^ Jump up to: Перейти обратно: а б «Главная страница IEEE TEMS — Общество управления технологиями и инженерией IEEE» (PDF) . Общество управления технологиями и инженерией IEEE .
- ^ «tech_conf_papers/A14» (PDF) . Архивировано из оригинала (PDF) 30 июня 2015 года . Проверено 17 июня 2015 г.
- ^ Пейдж, Льюис. «Суперджеты F-22 могут выступать в качестве летающих точек доступа Wi-Fi». Регистр , 19 июня 2007 г. Дата обращения: 7 ноября 2009 г.
- ^ «NAVAIR — Командование авиационных систем ВМС США — Исследования, разработки, приобретение, испытания и оценка авиации ВМФ и Корпуса морской пехоты» . [ постоянная мертвая ссылка ]
- ^ Рогоуэй, Тайлер (21 ноября 2015 г.). «У истребителя Gripen NG компании SAAB есть потрясающий способ повысить возможности радара» . jalopnik.com . Кинджа . Проверено 12 апреля 2016 г.
- ^ Введение в моделирование радиоэлектронной борьбы . Артех Хаус. 2001. ISBN 9781596933118 – через Google Книги.
- ^ Адами, Дэвид (26 марта 2018 г.). Введение в моделирование радиоэлектронной борьбы . Артех Хаус. ISBN 9781596933118 – через Google Книги.
- ^ «Ошибка 308» . Архивировано из оригинала 6 мая 2015 года . Проверено 17 июня 2015 г.
- ^ Jump up to: Перейти обратно: а б http://www.ausairpower.net/APA-PLA-AWACS-Programs.html Программы раннего предупреждения и контроля с воздуха НОАК-ВС
- ^ «Китайская военная авиация | ВВС Китая» . Архивировано из оригинала 5 декабря 2011 г. Проверено 10 декабря 2011 г. Китайская военная авиация – Истребители (продолжение)
- ^ «Новый китайский самолет J-16D может иметь новые ужасающие военные возможности | Национальный интерес» . 30 ноября 2017 г.
- ^ «Saab запускает многоцелевую бортовую систему наблюдения GlobalEye» . Военно-воздушные технологии . 17 февраля 2016 г.
- ^ "ПИКОСАР - ДЕТАЛЬ - Леонардо" . Проверено 27 июля 2016 г.
- ^ «ВОРОН ES-05» . Леонардокомпания.com . Проверено 27 июля 2016 г.
- ^ «Решение Gripen — радар с АФАР» . Архивировано из оригинала 19 декабря 2013 г. Проверено 19 декабря 2013 г.
- ^ «SeaSpray 5000E – ПОДРОБНОСТИ – Леонардо» . Проверено 27 июля 2016 г.
- ^ «SeaSpray 7000E – ПОДРОБНОСТИ – Леонардо» . Проверено 27 июля 2016 г.
- ^ "SeaSpray 7500E - ПОДРОБНОСТИ - Леонардо" . Проверено 27 июля 2016 г.
- ^ "VIXEN 500E - ДЕТАЛИ - Леонардо" . Проверено 27 июля 2016 г.
- ^ "VIXEN 1000E - ДЕТАЛИ - Леонардо" . Проверено 27 июля 2016 г.
- ^ Jane's Navy International, август 2010 г., «Расширение покрытия от моря до неба»
- ^ Jump up to: Перейти обратно: а б «БЕЛ | Продукция» . Архивировано из оригинала 03.11.2016 . Проверено 1 ноября 2016 г.
- ^ МИННИК, ВЕНДЕЛЛ (22 ноября 2014 г.). «Китайский анти-стелс-радар приносит плоды» . www.defensenews.com . Ганнетт. Архивировано из оригинала 24 ноября 2014 года . Проверено 25 ноября 2014 г.
- ^ http://www.ausairpower.net/APA-HQ-9-12-Battery-Radars.html Батарейные радары ЗРК HQ-9 и HQ-12.
- ^ Джон С. Уайз (13 января 2009 г.). «Радары ПВО НОАК» . п. 1 . Проверено 17 июня 2015 г.
- ^ Переносной радар низкого уровня (LLTR) - Ашвини https://www.drdo.gov.in/sites/default/files/inline-files/lltr.pdf
- ^ «Список радаров DRDO» . drdo.gov.in. Архивировано из оригинала 23 июля 2014 года . Проверено 25 июля 2016 г.
- ^ «Радар тактического управления ПВО (ADTCR)» . Организация оборонных исследований и разработок, Министерство обороны, Правительство Индии . Архивировано из оригинала 08 июля 2020 г. Проверено 7 октября 2021 г.
- ^ «Радар управления огнем ПВО» . Организация оборонных исследований и разработок, Министерство обороны, Правительство Индии . Архивировано из оригинала 15 августа 2020 г. Проверено 7 октября 2021 г.
- ^ «TRML-4D — Многофункциональная радиолокационная система воздушного наблюдения и целеуказания | HENSOLDT» .
- ^ «Hensoldt представляет многофункциональный радар воздушного наблюдения и обнаружения целей TRML-4D | Новости обороны, май 2021 г., глобальная безопасность, армейская промышленность | Глобальные новости индустрии обороны, армия, 2021 год | Архив новостей года» .
- ^ «HENSOLDT представляет новый наземный радар ПВО» . 19 июня 2018 г.
- ^ «Defexpo 2016: Larsen & Toubro представляет новую радиолокационную систему управления огнем ПВО» . Армейское признание . Архивировано из оригинала 1 апреля 2016 г. Проверено 7 октября 2021 г.
- ^ «Lockheed Martin завершает производство первой РЛС AN/TPY-4» . 5 мая 2022 г.
- ^ «Китайская академия наук разработала радар активной фазы «Морской Соколиный Глаз», и ВМС проходят проверку эффективности — www.upmedia.mg Проверено 2 г. мая 2023
- ^ http://www.rada.com/capabilities-3/land-radars-2.html. Архивировано 13 мая 2020 г. на Wayback Machine RADA. тактических наземных радарах
- ^ «Швейцарский армейский нож среди радаров. Для солдат радар KuRFS делает все и все сразу | Raytheon Missiles & Defense» .
- ^ http://www.janes.com/article/38219/saab-expands-surface-radar-portfolio Saab расширяет линейку наземных радаров
- ^ "КРОНОС ЛЭНД - ДЕТАЛЬ - Селекс ES" . Архивировано из оригинала 18 марта 2015 года . Проверено 17 июня 2015 г.
- ^ "КРОНОС НАВАЛ - ДЕТАЛЬ - Селекс ES" . Архивировано из оригинала 17 марта 2015 года . Проверено 17 июня 2015 г.
- ^ «СМАРТ-Л ММ | Thales Group» .
Библиография [ править ]
- Bell Labs (октябрь 1975 г.). Исследования и разработки ABM в Bell Laboratories, История проекта (PDF) (Технический отчет) . Проверено 13 декабря 2014 г.
Внешние ссылки [ править ]
- Активные массивы с электронным управлением – развивающаяся технология (ausairpower.net)
- FLUG REVUE, декабрь 1998 г.: Современные радиолокационные технологии истребителей (flug-revue.rotor.com).
- Фазированные антенные решетки и радары – прошлое, настоящее и будущее (mwjournal.com)