Автономная система (математика)


В математике автономная система или автономное дифференциальное уравнение — это система обыкновенных дифференциальных уравнений , которая явно не зависит от независимой переменной . Когда переменной является время, их также называют стационарными системами .
Многие законы физики , где независимой переменной обычно считается время , выражаются как автономные системы, поскольку предполагается, что законы природы , действующие сейчас, идентичны законам для любого момента в прошлом или будущем.
Определение
[ редактировать ]Автономная система — это система обыкновенных дифференциальных уравнений вида где x принимает значения в n -мерном евклидовом пространстве ; t часто интерпретируется как время.

Его отличают от систем дифференциальных уравнений вида в котором закон, управляющий эволюцией системы, зависит не только от текущего состояния системы, но и от параметра t , который опять же часто интерпретируется как время; такие системы по определению не являются автономными.

Характеристики
[ редактировать ]Решения инвариантны относительно горизонтальных сдвигов:
Позволять быть единственным решением начальной задачи для автономной системы Затем решает Обозначая получает и , таким образом Для начального условия проверка тривиальна:









Пример
[ редактировать ]Уравнение является автономным, поскольку независимая переменная ( ) не появляется в уравнении явно. Чтобы построить поле наклона и изоклину для этого уравнения, можно использовать следующий код в GNU Octave / MATLAB.


Ffun = @(X, Y)(2 - Y) .* Y; % function f(x,y)=(2-y)y[X, Y] = meshgrid(0:.2:6, -1:.2:3); % choose the plot sizesDY = Ffun(X, Y); DX = ones(size(DY)); % generate the plot valuesquiver(X, Y, DX, DY, 'k'); % plot the direction field in blackhold on;contour(X, Y, DY, [0 1 2], 'g'); % add the isoclines(0 1 2) in greentitle('Slope field and isoclines for f(x,y)=(2-y)y')Из графика видно, что функция является -инвариант, как и форма решения, т.е. на любую смену .



Символическое решение уравнения в MATLAB , запустив
syms y(x);equation = (diff(y) == (2 - y) * y);% solve the equation for a general solution symbolicallyy_general = dsolve(equation);получает два равновесных решения, и и третье решение, включающее неизвестную константу , -2 / (exp(C3 - 2 * x) - 1).



Подобрав для начального условия какие-то конкретные значения , можно сложить графики нескольких решений.
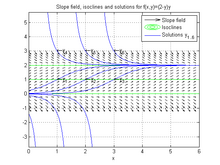
% solve the initial value problem symbolically% for different initial conditionsy1 = dsolve(equation, y(1) == 1); y2 = dsolve(equation, y(2) == 1);y3 = dsolve(equation, y(3) == 1); y4 = dsolve(equation, y(1) == 3);y5 = dsolve(equation, y(2) == 3); y6 = dsolve(equation, y(3) == 3);% plot the solutionsezplot(y1, [0 6]); ezplot(y2, [0 6]); ezplot(y3, [0 6]);ezplot(y4, [0 6]); ezplot(y5, [0 6]); ezplot(y6, [0 6]);title('Slope field, isoclines and solutions for f(x,y)=(2-y)y')legend('Slope field', 'Isoclines', 'Solutions y_{1..6}');text([1 2 3], [1 1 1], strcat('\leftarrow', {'y_1', 'y_2', 'y_3'}));text([1 2 3], [3 3 3], strcat('\leftarrow', {'y_4', 'y_5', 'y_6'}));grid on;Качественный анализ
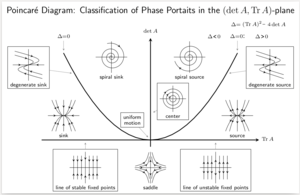
[ редактировать ]Автономные системы можно качественно анализировать с использованием фазового пространства ; в случае с одной переменной это фазовая линия .
Методы решения
[ редактировать ]Следующие методы применимы к одномерным автономным дифференциальным уравнениям. Любое одномерное уравнение порядка эквивалентно -мерная система первого порядка (как описано при приведении к системе первого порядка ), но не обязательно наоборот.

Первый заказ
[ редактировать ]Автономное уравнение первого порядка разделима , поэтому ее можно решить , приведя ее к целочисленному виду


Второй заказ
[ редактировать ]Автономное уравнение второго порядка сложнее, но решаемо [2] путем введения новой переменной и выражая вторую производную от через правило цепочки как так что исходное уравнение принимает вид которое представляет собой уравнение первого порядка, не содержащее ссылки на независимую переменную . Решение обеспечивает как функция . Тогда, вспомнив определение :







что является неявным решением.
Особый случай: x ″ = f ( x )
[ редактировать ]Особый случай, когда не зависит от



выгоды от отдельного лечения. [3] Уравнения такого типа очень распространены в классической механике , поскольку они всегда являются гамильтоновыми системами .
Идея состоит в том, чтобы использовать идентичность

что следует из правила цепочки , исключающего любые проблемы, связанные с делением на ноль .
Инвертируя обе стороны автономной системы первого порядка, можно сразу интегрировать по отношению к :

это еще один способ рассмотреть технику разделения переменных. Вторая производная должна быть выражена как производная по вместо :
![{\displaystyle {\begin{aligned}{\frac {d^{2}x}{dt^{2}}}&={\frac {d}{dt}}\left({\frac {dx}{ dt}}\right)={\frac {d}{dx}}\left({\frac {dx}{dt}}\right){\frac {dx}{dt}}\\[4pt]&= {\frac {d}{dx}}\left(\left({\frac {dt}{dx}}\right)^{-1}\right)\left({\frac {dt}{dx}} \right)^{-1}\\[4pt]&=-\left({\frac {dt}{dx}}\right)^{-2}{\frac {d^{2}t}{dx ^{2}}}\left({\frac {dt}{dx}}\right)^{-1}=-\left({\frac {dt}{dx}}\right)^{-3} {\frac {d^{2}t}{dx^{2}}}\\[4pt]&={\frac {d}{dx}}\left({\frac {1}{2}}\ left({\frac {dt}{dx}}\right)^{-2}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/61dd1d34c8159410d13c8b36fbf45f0cc17311dc)
Еще раз подчеркну: удалось добиться того, что вторая производная по было выражено как производное от . Исходное уравнение второго порядка теперь можно проинтегрировать:

Это неявное решение. Самая большая потенциальная проблема — это неспособность упростить интегралы, что подразумевает сложность или невозможность вычисления констант интегрирования.
Особый случай: x ″ = x ′ н е ( х )
[ редактировать ]Используя описанный выше подход, эту технику можно распространить на более общее уравнение

где какой-то параметр, не равный двум. Это сработает, поскольку вторую производную можно записать в форме, включающей степень . Переписав вторую производную, переставив ее и выразив левую часть как производную:
![{\displaystyle {\begin{aligned}&-\left({\frac {dt}{dx}}\right)^{-3}{\frac {d^{2}t}{dx^{2}} }=\left({\frac {dt}{dx}}\right)^{-n}f(x)\\[4pt]&-\left({\frac {dt}{dx}}\right) ^{n-3}{\frac {d^{2}t}{dx^{2}}}=f(x)\\[4pt]&{\frac {d}{dx}}\left({ \frac {1}{2-n}}\left({\frac {dt}{dx}}\right)^{n-2}\right)=f(x)\\[4pt]&\left( {\frac {dt}{dx}}\right)^{n-2}=(2-n)\int f(x)dx+C_{1}\\[2pt]&t+C_{2}=\ int \left((2-n)\int f(x)dx+C_{1}\right)^{\frac {1}{n-2}}dx\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4b8405f11a927d716fd61add29fe4255fea96958)
Правая будет нести +/-, если четный. Лечение должно быть другим, если :


Высшие заказы
[ редактировать ]Аналогичного метода решения автономных уравнений третьего и более высокого порядка не существует. Такие уравнения можно решить точно только в том случае, если они обладают каким-либо другим упрощающим свойством, например линейностью или зависимостью правой части уравнения только от зависимой переменной. [4] [5] (т.е. не его производные). Это не должно вызывать удивления, учитывая, что нелинейные автономные системы в трех измерениях могут производить действительно хаотическое поведение, такое как аттрактор Лоренца и аттрактор Ресслера .
Аналогично, общие неавтономные уравнения второго порядка неразрешимы в явном виде, поскольку они также могут быть хаотическими, как в периодически вынужденном маятнике. [6]
Многомерный случай
[ редактировать ]В , где это -мерный вектор-столбец, зависящий от .


Решение где это постоянный вектор. [7]



Конечная длительность
[ редактировать ]Для нелинейных автономных ОДУ при некоторых условиях возможно разработать решения конечной длительности: [8] Здесь имеется в виду, что в силу своей собственной динамики система достигнет нулевого значения в конечный момент времени и после этого останется в этом нулевом значении навсегда. Эти решения конечной длительности не могут быть аналитическими функциями на всей действительной прямой, и поскольку в конечный момент времени они будут нелипшицевыми функциями, они не сохраняют уникальность решений липшицевых дифференциальных уравнений.
Например, уравнение:

Допускает решение конечной длительности:

См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Математика Эгвальда - Линейная алгебра: системы линейных дифференциальных уравнений: анализ линейной устойчивости , по состоянию на 10 октября 2019 г.
- ^ Бойс, Уильям Э.; Ричард К. ДиПрима (2005). Элементарные дифференциальные уравнения и задачи граничного объема (8-е изд.). Джон Уайли и сыновья. п. 133. ИСБН 0-471-43338-1 .
- ^ «Автономное уравнение второго порядка» (PDF) . Экмир . Проверено 28 февраля 2021 г.
- ^ Автономное уравнение третьего порядка в eqworld .
- ^ Автономное уравнение четвертого порядка в eqworld .
- ^ Бланшар; Девани ; Холл (2005). Дифференциальные уравнения . Brooks/Cole Publishing Co., стр. 540–543. ISBN 0-495-01265-3 .
- ^ «Метод матричной экспоненты» . Математика24 . Проверено 28 февраля 2021 г.
- ^ Вардиа Т. Хаймо (1985). «Дифференциальные уравнения в конечном времени» . 1985 24-я конференция IEEE по принятию решений и управлению . стр. 1729–1733. дои : 10.1109/CDC.1985.268832 . S2CID 45426376 .
| Базы данных органов управления : Национальные |
|---|