3D-проекция
этой статьи Начальный раздел может быть слишком коротким, чтобы адекватно суммировать ключевые моменты . ( июль 2019 г. ) |

| Часть серии о |
| Графическая проекция |
|---|
 |
( 3D-проекция или графическая проекция ) — это метод проектирования, используемый для отображения трехмерного (3D) объекта на двухмерной (2D) поверхности. Эти проекции основаны на визуальной перспективе и анализе аспектов, позволяющих проецировать сложный объект для возможности просмотра в более простой плоскости.
3D-проекции используют основные качества базовой формы объекта для создания карты точек, которые затем соединяются друг с другом для создания визуального элемента. Результатом является графика, содержащая концептуальные свойства, позволяющие интерпретировать фигуру или изображение не как плоскую (2D), а как твердый объект (3D), просматриваемый на 2D-дисплее.
3D-объекты в основном отображаются на двумерных носителях (например, на бумаге и компьютерных мониторах). Таким образом, графические проекции являются широко используемым элементом дизайна; в частности, в инженерном черчении , черчении и компьютерной графике . Прогнозы можно рассчитать с помощью математического анализа и формул или с использованием различных геометрических и оптических методов.
Обзор
[ редактировать ]
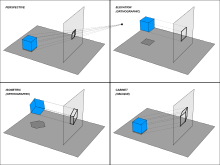
Проекция достигается за счет использования воображаемых «проекторов»; спроецированный мысленный образ становится видением техники желаемой, законченной картины. [ нужны дальнейшие объяснения ] Методы обеспечивают единую процедуру визуализации среди людей, обученных технической графике (механическое черчение, компьютерное проектирование и т. д.). Следуя определенному методу, техник может создать воображаемое изображение на плоской поверхности, например, на бумаге для рисования.
Существует две категории графических проекций, каждая со своим методом:
 Многоракурсная проекция (высота)
Многоракурсная проекция (высота)









Параллельная проекция
[ редактировать ]
При параллельной проекции линии взгляда от объекта на плоскость проекции параллельны друг другу. Таким образом, линии, параллельные в трехмерном пространстве, остаются параллельными и в двухмерном проецируемом изображении. Параллельная проекция также соответствует перспективной проекции с бесконечным фокусным расстоянием камеры (расстоянием от объектива и фокусной точкой ) или « зумом ».
Изображения, нарисованные в параллельной проекции, основаны на методе аксонометрии («измерение по осям»), как описано в теореме Польке . В общем случае полученное изображение является косым (лучи не перпендикулярны плоскости изображения); но в особых случаях результат ортогональный (лучи перпендикулярны плоскости изображения). Аксонометрию не следует путать с аксонометрической проекцией , поскольку в англоязычной литературе последняя обычно относится только к определенному классу изображений (см. ниже).
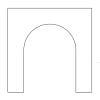
Ортографическая проекция
[ редактировать ]Орфографическая проекция основана на принципах начертательной геометрии и представляет собой двумерное представление трехмерного объекта. Это параллельная проекция (линии проекции параллельны как в реальности, так и в плоскости проекции). Это тип проекции, который выбирают для рабочих чертежей .
Если нормаль плоскости просмотра (направление камеры) параллельна одной из основных осей (которой является ось x , y или z ), математическое преобразование выглядит следующим образом:Проецирование 3D-точки , , на 2D точку , используя ортогональную проекцию, параллельную оси y (где положительное значение y представляет направление вперед - вид в профиль), можно использовать следующие уравнения:







где вектор s — произвольный масштабный коэффициент, а c — произвольное смещение. Эти константы не являются обязательными и могут использоваться для правильного выравнивания области просмотра. Используя умножение матриц , уравнения принимают вид:

Хотя ортогонально проецируемые изображения отражают трехмерную природу проецируемого объекта, они не представляют объект так, как он был бы записан фотографически или воспринят зрителем, наблюдающим его непосредственно. В частности, параллельные длины во всех точках ортогонально проецируемого изображения имеют одинаковый масштаб независимо от того, находятся ли они далеко или близко от виртуального зрителя. В результате длины не сокращаются, как это было бы в перспективной проекции.
Многоракурсная проекция
[ редактировать ]
При многоракурсных проекциях создается до шести изображений (называемых первичными видами ) объекта, при этом каждая плоскость проекции параллельна одной из координатных осей объекта. Виды располагаются относительно друг друга по одной из двух схем: проекции по первому или третьему ракурсу . В каждом из них внешний вид видов можно рассматривать как проецирование на плоскости, образующие шестисторонний прямоугольник вокруг объекта. Хотя можно нарисовать шесть разных сторон, обычно три вида рисунка дают достаточно информации для создания трехмерного объекта. Эти виды известны как вид спереди , вид сверху и вид с торца . термины высота , план и разрез Также используются .
Косая проекция
[ редактировать ]

В косых проекциях параллельные лучи проекции не перпендикулярны плоскости просмотра, как в ортогональной проекции, а падают на плоскость проекции под углом, отличным от девяноста градусов. Как в ортографической, так и в наклонной проекции параллельные линии в пространстве кажутся параллельными на проецируемом изображении. Из-за своей простоты косая проекция используется исключительно в изобразительных целях, а не для формальных рабочих рисунков. На наклонном графическом рисунке отображаемые углы между осями, а также коэффициенты ракурса (масштаб) являются произвольными. Создаваемое таким образом искажение обычно ослабляется путем выравнивания одной плоскости отображаемого объекта параллельно плоскости проекции, тем самым создавая полноразмерное изображение выбранной плоскости истинной формы. К особым типам косых проекций относятся:
Кавалерийская проекция (45°)
[ редактировать ]В бесцеремонной проекции (иногда бесцеремонной перспективе или высокой точке обзора ) точка объекта представлена тремя координатами: x , y и z . На чертеже он представлен всего двумя координатами: x″ и y″ . На плоском чертеже две оси x и z на рисунке перпендикулярны , а длины по этим осям нарисованы в масштабе 1:1; Таким образом, она похожа на диметрические проекции , хотя и не является аксонометрической проекцией , поскольку третья ось, здесь y , нарисована по диагонали, образуя произвольный угол с осью x″ , обычно 30 или 45°. Длина третьей оси не масштабируется.
Проекция шкафа
[ редактировать ]Термин «проекция шкафа» (иногда «перспектива шкафа» ) возник из-за его использования в иллюстрациях в мебельной промышленности. [ нужна ссылка ] Как и в бесцеремонной перспективе, одна грань проецируемого объекта параллельна плоскости просмотра, а третья ось проецируется под углом (обычно 30° или 45° или arctan(2) = 63,4°). В отличие от кавалерной проекции, где третья ось сохраняет свою длину, в кабинетной проекции длина отступающих линий сокращается вдвое.
Военная проекция
[ редактировать ]Вариант косой проекции называется военной проекцией . В этом случае горизонтальные разрезы рисуются изометрически, чтобы планы этажей не искажались, а вертикали рисуются под углом. Военная проекция задается вращением в плоскости xy и вертикальным перемещением на величину z . [1]
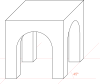
Аксонометрическая проекция
[ редактировать ]
Аксонометрические проекции показывают изображение объекта, если смотреть под наклоном, чтобы выявить все три направления (оси) пространства на одном снимке. [2] Аксонометрические проекции могут быть ортогональными или косыми . Чертежи аксонометрических инструментов часто используются для аппроксимации графических перспективных проекций, но при приближении возникают сопутствующие искажения. Поскольку графические проекции изначально содержат это искажение, в инструментальных рисунках изображений можно использовать большие вольности для экономии усилий и достижения наилучшего эффекта. [ нужны разъяснения ]
Аксонометрическая проекция далее подразделяется на три категории: изометрическая проекция , диметрическая проекция и триметрическая проекция , в зависимости от точного угла, на который вид отклоняется от ортогонального. [3] [4] Типичной характеристикой орфографических изображений является то, что одна ось пространства обычно отображается вертикально.
Изометрическая проекция
[ редактировать ]В изометрических изображениях (методы см. в разделе Изометрическая проекция ) направление взгляда таково, что три оси пространства кажутся одинаково укороченными, и между ними существует общий угол 120 °. Искажение, вызванное ракурсом, является равномерным, поэтому пропорциональность всех сторон и длин сохраняется, а оси имеют общий масштаб. Это позволяет считывать или снимать измерения непосредственно с чертежа.
Диметрическая проекция
[ редактировать ]В диметрических изображениях (методы см. в Диметрической проекции ) направление просмотра таково, что две из трех осей пространства кажутся одинаково укороченными, из которых сопутствующий масштаб и углы представления определяются в зависимости от угла обзора; масштаб третьего направления (вертикального) определяется отдельно. Приближения распространены на диметрических чертежах.
Триметрическая проекция
[ редактировать ]В триметрических изображениях (методы см. в разделе «Триметрическая проекция ») направление взгляда таково, что все три оси пространства кажутся неравномерно укороченными. Масштаб по каждой из трех осей и углы между ними определяются отдельно в зависимости от угла обзора. Приближения в триметрических чертежах распространены.
Ограничения параллельного проецирования
[ редактировать ]

Объекты, нарисованные с помощью параллельной проекции, не кажутся больше или меньше по мере того, как они приближаются к зрителю или удаляются от него. Хотя это и выгодно для архитектурных чертежей , где измерения должны проводиться непосредственно с изображения, результатом является воспринимаемое искажение, поскольку, в отличие от перспективной проекции , наши глаза или фотография обычно не работают так. Это также может легко привести к ситуациям, когда глубину и высоту трудно измерить, как показано на рисунке справа.
На этом изометрическом рисунке синяя сфера на две единицы выше красной. Однако эта разница в высоте не заметна, если закрыть правую половину изображения, поскольку прямоугольники (которые служат подсказками, указывающими высоту) тогда затемняются.
Эта визуальная двусмысленность использовалась в оп-арте , а также в рисунках «невозможных объектов». » М.К. Эшера ( «Водопад 1961), хотя и не использует строго параллельную проекцию, представляет собой хорошо известный пример, в котором кажется, что канал воды движется без посторонней помощи по нисходящей траектории, но затем парадоксальным образом снова падает, возвращаясь в исходное положение. источник. Таким образом, кажется, что вода не подчиняется закону сохранения энергии . Крайний пример изображен в фильме «Начало» , где с помощью трюка с принудительной перспективой неподвижная лестница меняет свою связность. Видеоигра Fez использует приемы перспективы, чтобы определить, где игрок может, а где не может двигаться, в стиле головоломки.
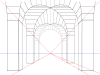
Перспективная проекция
[ редактировать ]

Перспективная проекция или перспективное преобразование — это проекция, при которой трехмерные объекты проецируются на картинную плоскость . Это приводит к тому, что удаленные объекты кажутся меньше, чем более близкие.
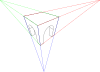
Это также означает, что линии, которые по своей природе параллельны (то есть встречаются в бесконечной точке ), кажутся пересекающимися на проецируемом изображении. Например, если железные дороги изображены в перспективной проекции, кажется, что они сходятся к одной точке, называемой точкой схода . Фотообъективы и человеческий глаз работают одинаково, поэтому перспективная проекция выглядит наиболее реалистично. [5] Перспективную проекцию принято подразделять на одноточечную , двухточечную и трехточечную перспективу в зависимости от ориентации плоскости проекции по отношению к осям изображаемого предмета. [6]
Методы графического проецирования основаны на двойственности линий и точек: две прямые линии определяют точку, а две точки определяют прямую линию. Ортогональная проекция точки глаза на картинную плоскость называется главной точкой схода (PP на схеме справа, от итальянского термина punto Principale , придуманного в эпоху Возрождения). [7]
Двумя важными точками линии являются:
- его пересечение с картинной плоскостью, и
- его точка схода находится на пересечении параллельной линии, идущей от точки глаза, и картинной плоскости.
Основная точка схода — это точка схода всех горизонтальных линий, перпендикулярных картинной плоскости. Точки схода всех горизонтальных линий лежат на линии горизонта . Если, как это часто бывает, картинная плоскость вертикальна, все вертикальные линии рисуются вертикально и не имеют конечной точки схода на картинной плоскости. Для проектирования геометрических сцен можно легко предусмотреть различные графические методы. Например, линии, проведённые от точки глаза под углом 45° до картинной плоскости, пересекают последнюю по кругу, радиус которого равен расстоянию точки глаза от плоскости, таким образом, отслеживание этого круга помогает построить все точки схода под углом 45°. линии; в частности, пересечение этого круга с линией горизонта состоит из двух точек расстояния . Они полезны для рисования шахматных полов, которые, в свою очередь, служат для определения местоположения объектов на сцене. В перспективе геометрического тела справа после выбора главной точки схода, которая определяет линию горизонта, точка схода под углом 45 ° в левой части рисунка завершает характеристику (одинаково удаленной) точки зрения. От ортогональной проекции каждой вершины проводятся две линии: одна под углом 45° и одна под углом 90° к картинной плоскости. После пересечения линии земли эти линии направляются к точке расстояния (для 45°) или к главной точке (для 90°). Их новое пересечение определяет местонахождение проекции карты. Естественные высоты измеряются над линией земли, а затем проецируются таким же образом до тех пор, пока они не совпадут с вертикалью карты.
В то время как ортогональная проекция игнорирует перспективу, чтобы обеспечить точные измерения, перспективная проекция показывает удаленные объекты меньшими, чтобы обеспечить дополнительный реализм.
Математическая формула
[ редактировать ]Перспективная проекция требует более сложного определения по сравнению с орфографическими проекциями. Концептуальной помощью для понимания механики этой проекции является представление 2D-проекции так, как будто объект(ы) просматриваются через видоискатель камеры. камеры Положение, ориентация и поле зрения управляют поведением преобразования проекции. Для описания этого преобразования определены следующие переменные:
- – трехмерное положение точки А, которую необходимо проецировать.
- – трехмерное положение точки C, представляющей камеру.
- – Ориентация камеры (представленная углами Тейта–Брайана ).
- – положение поверхности дисплея относительно вышеупомянутого . [8]





В большинстве соглашений используются положительные значения z (плоскость, находящаяся перед точечным отверстием). ), однако отрицательные значения z физически более корректны, но изображение будет перевернуто как по горизонтали, так и по вертикали.Что приводит к:
- – 2D-проекция


Когда и 3D вектор проецируется на 2D-вектор .




В противном случае, чтобы вычислить мы сначала определяем вектор как положение точки A относительно системы координат, определенной камерой, с началом координат в C и повернутой на относительно исходной системы координат. Это достигается вычитанием от а затем применив вращение на к результату. Это преобразование часто называют camera Transform и может быть выражен следующим образом, выражая вращение через вращения вокруг осей x, y и z (эти вычисления предполагают, что оси упорядочены как левая система осей): [9] [10]





Это представление соответствует вращению на три угла Эйлера (точнее, углы Тейта – Брайана ) с использованием соглашения xyz , которое можно интерпретировать либо как «поворот вокруг внешних осей (осей сцены ) в порядке z , y , x. (чтение справа налево)» или «вращаться вокруг внутренних осей (осей камеры ) в порядке x, y, z (чтение слева направо)». Если камера не повернута ( ), то матрицы выпадают (как тождества), и это сводится к простому сдвигу:


Альтернативно, не используя матрицы (заменим с и так далее, и сокращайте к и к ): [ нужны разъяснения ]







Эту преобразованную точку затем можно спроецировать на 2D-плоскость по формуле (здесь x / y используется в качестве плоскости проекции; в литературе также может использоваться x / z ): [11]
![{\displaystyle {\begin{aligned}\mathbf {b} _{x}&={\frac {\mathbf {e} _{z}}{\mathbf {d} _{z}}}\mathbf {d } _{x}+\mathbf {e} _{x},\\[5pt]\mathbf {b} _{y}&={\frac {\mathbf {e} _{z}}{\mathbf { d} _{z}}}\mathbf {d} _{y}+\mathbf {e} _{y}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f002d3d4ed5e51f66a9e80bad596258adb82ed25)
Или в матричной форме с использованием однородных координат система

в сочетании с рассуждением с использованием подобных треугольников приводит к делению по однородной координате, давая

Расстояние зрителя от поверхности дисплея, , напрямую относится к полю зрения, где это угол обзора. (Примечание. Предполагается, что вы сопоставляете точки (-1,-1) и (1,1) с углами вашей поверхности просмотра.)


Приведенные выше уравнения также можно переписать как:

В котором размер дисплея, размер записывающей поверхности ( ПЗС или фотопленка ), — расстояние от записывающей поверхности до входного зрачка ( центра камеры ), а — расстояние от проецируемой 3D-точки до входного зрачка.




Последующие операции обрезки и масштабирования могут потребоваться для отображения 2D-плоскости на любом конкретном носителе отображения.
Слабая перспективная проекция
[ редактировать ]«Слабая» перспективная проекция использует те же принципы, что и ортогональная проекция, но требует указания коэффициента масштабирования, что гарантирует, что более близкие объекты кажутся больше в проекции, и наоборот. Ее можно рассматривать как гибрид ортографической и перспективной проекций и описывать либо как перспективную проекцию с глубиной отдельных точек. заменена средней постоянной глубиной , [12] или просто как орфографическая проекция плюс масштабирование. [13]


Таким образом, модель со слабой перспективой аппроксимирует перспективную проекцию, используя при этом более простую модель, аналогичную чистой (немасштабированной) ортогональной перспективе.Это разумное приближение, когда глубина объекта вдоль луча зрения мала по сравнению с расстоянием от камеры, а поле зрения мало. При этих условиях можно предположить, что все точки 3D-объекта находятся на одинаковом расстоянии. с камеры без существенных ошибок проекции (по сравнению с полноперспективной моделью).
Уравнение
![{\displaystyle {\begin{aligned}&P_{x}={\frac {X}{Z_{\text{ave}}}}\\[5pt]&P_{y}={\frac {Y}{Z_{ \text{ave}}}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d66248cfb79bcde6f7e7d136e18c3a7498b4ddd)
предполагая фокусное расстояние .

Диаграмма
[ редактировать ]![]()
Чтобы определить, координата x какого экрана соответствует точке в умножьте координаты точки на:


где
- экрана x это координата
- модели x координата
- фокусное расстояние — осевое расстояние от центра камеры до плоскости изображения.
- расстояние до объекта.




Поскольку камера находится в 3D, то же самое работает и с координатой y экрана , заменяя y на x в приведенной выше диаграмме и уравнении.
В качестве альтернативы можно использовать методы обрезки, заменяя переменные значениями точки, находящейся за пределами угла обзора, и точки внутри матрицы камеры.
Этот метод, также известный как «Обратная камера», представляет собой расчет перспективной проекции с известными значениями для расчета последней точки на видимом угле, проецируемой из невидимой точки, после завершения всех необходимых преобразований.
См. также
[ редактировать ]- 3D компьютерная графика
- Матрица камеры
- Компьютерная графика
- Сечение (геометрия)
- Вид в разрезе
- Криволинейная перспектива
- Рисунок в разрезе
- Начертательная геометрия
- Инженерный чертеж
- Чертеж в разобранном виде
- Однородные координаты
- Гомография
- Картографическая проекция (включая цилиндрическую проекцию )
- Многоракурсная проекция
- Перспектива (графическая)
- План (чертеж)
- Технический чертеж
- Тессеракт
- Наложение текстур
- Преобразование, обрезка и освещение
- Видеокарта
- Просмотр усеченной пирамиды
- Виртуальный глобус
Ссылки
[ редактировать ]- ^ Трейбергс, Андрейс. «Геометрия перспективного рисунка на компьютере» . Университет Юты § Математический факультет. Архивировано из оригинала 30 апреля 2015 г. Проверено 24 апреля 2015 г.
- ^ Митчелл, Уильям; Малкольм Маккалоу (1994). Средства цифрового дизайна . Джон Уайли и сыновья. п. 169. ИСБН 978-0-471-28666-0 .
- ^ Мейнард, Патрик (2005). Различия в рисунке: разновидности графической выразительности . Издательство Корнельского университета. п. 22. ISBN 978-0-8014-7280-0 .
- ^ Макрейнольдс, Том; Дэвид Блайт (2005). Расширенное графическое программирование с использованием openGL . Эльзевир. п. 502. ИСБН 978-1-55860-659-3 .
- ^ Д. Хирн и М. Бейкер (1997). Компьютерная графика, версия C. Энглвуд Клиффс: Прентис Холл], глава 9
- ^ Джеймс Фоули (1997). Компьютерная графика . Бостон: Аддисон-Уэсли. ISBN 0-201-84840-6 ], глава 6.
- ^ Кирсти Андерсен (2007), Геометрия искусства , Springer, с. XXIX, ISBN 9780387259611
- ^ Ингрид Карлбом, Джозеф Пасиорек (1978). «Плоские геометрические проекции и трансформации просмотра» (PDF) . Обзоры вычислительной техники ACM . 10 (4): 465–502. CiteSeerX 10.1.1.532.4774 . дои : 10.1145/356744.356750 . S2CID 708008 .
- ^ Райли, К.Ф. (2006). Математические методы в физике и технике . Издательство Кембриджского университета . стр. 931 , 942. ISBN. 978-0-521-67971-8 .
- ^ Гольдштейн, Герберт (1980). Классическая механика (2-е изд.). Ридинг, Массачусетс: Паб Addison-Wesley. Ко, стр. 146–148. ISBN 978-0-201-02918-5 .
- ^ Сонька, М; Главац, В; Бойл, Р. (1995). Обработка изображений, анализ и машинное зрение (2-е изд.). Чепмен и Холл. п. 14. ISBN 978-0-412-45570-4 .
- ^ Субхашис Банерджи (18 февраля 2002 г.). «Камера со слабой перспективой» .
- ^ Альтер, Т.Д. (июль 1992 г.). 3D-поза из 3 соответствующих точек в проекции со слабой перспективой (PDF) (Технический отчет). Массачусетского технологического института Лаборатория искусственного интеллекта .
Дальнейшее чтение
[ редактировать ]- Кеннет К. Финни (2004). Программирование 3D-игр «Все в одном» . Курс Томсона. п. 93 . ISBN 978-1-59200-136-1 .
3D проекция.
- Келер; Ральф (декабрь 2000 г.). 2D/3D-графика и сплайны с исходным кодом . Авторские решения Инкорпорейтед. ISBN 978-0759611870 .