Батиметрия

Батиметрия ( / b ə ˈ θ ɪ m ə t r i / ; от древнегреческого βαθυς ( Bathús ) «глубокий» и μέτρον ( métron ) «мера») [1] [2] Это исследование подводной глубины океанского дна ( топография морского дна ), дна озер или дна рек. Другими словами, батиметрия — это подводный эквивалент гипсометрии или топографии . Первые зарегистрированные свидетельства измерения глубины воды относятся к Древнему Египту более 3000 лет назад. [3]
Батиметрические карты (не путать с гидрографическими картами ) обычно создаются для обеспечения безопасности надводной или подземной навигации и обычно показывают рельеф морского дна или в виде контурных линий (называемых глубин изобатами зондирования ) и выбранных глубин ( местность ). и обычно также предоставляют наземную навигационную информацию. Батиметрические карты (более общий термин, в котором безопасность мореплавания не является проблемой) также могут использовать цифровую модель местности и методы искусственного освещения для иллюстрации изображаемых глубин. Глобальная батиметрия иногда объединяется с топографическими данными для получения глобальной модели рельефа . Палеобатиметрия – это исследование прошлых подводных глубин.
Синонимы включают картографирование морского дна , картографирование морского дна , визуализацию морского дна и визуализацию морского дна . Батиметрические измерения проводятся различными методами: от глубинного зондирования , гидролокаторов и лидаров до буев и спутниковой альтиметрии . Различные методы имеют преимущества и недостатки, и конкретный используемый метод зависит от масштаба исследуемой территории, финансовых возможностей, желаемой точности измерений и дополнительных переменных. Несмотря на современные компьютерные исследования, морское дно океана во многих местах менее измерено, топография Марса чем . [4]
Топография морского дна [ править ]

Топография морского дна (топография океана или морская топография) относится к форме суши ( топографии ), когда она соединяется с океаном. Эти формы очевидны вдоль береговой линии, но в значительной степени они встречаются и под водой. Эффективность морской среды обитания частично определяется этими формами, в том числе тем, как они взаимодействуют с океанскими течениями и формируют их , а также тем, как уменьшается солнечный свет, когда эти формы рельефа занимают все большую глубину. Приливные сети зависят от баланса между осадочными процессами и гидродинамикой, однако антропогенное воздействие может повлиять на природную систему больше, чем любой физический фактор. [5]
Морская топография включает прибрежные и океанические формы рельефа, начиная от прибрежных эстуариев и береговых линий и заканчивая континентальными шельфами и коралловыми рифами . Дальше, в открытом океане, они включают в себя подводные и глубоководные объекты, такие как океанские возвышения и подводные горы . Подводная поверхность имеет гористые особенности, включая систему срединно-океанических хребтов , охватывающую весь земной шар, а также подводные вулканы . [6] океанические желоба , подводные каньоны , океанические плато и абиссальные равнины .
Масса Мирового океана составляет примерно 1,35 × 10 18 метрические тонны , или около 1/4400 от общей массы Земли. Океаны занимают площадь 3,618 × 10. 8 км 2 со средней глубиной 3682 м, что дает расчетный объем 1,332 × 10 9 км 3 . [7]Измерение [ править ]

Первоначально батиметрия включала измерение глубины океана посредством зондирования глубины . В ранних методах использовалась заранее измеренная тяжелая веревка или трос, спущенная через борт корабля. [8] Этот метод измеряет глубину только в особой точке за раз и поэтому неэффективен. Он также зависит от движений корабля и течений, смещающих линию от истинной, и поэтому не является точным.
Данные, используемые сегодня для создания батиметрических карт, обычно поступают от эхолота ( сонара ), установленного под или над бортом лодки, «направляющего» звуковой луч вниз на морское дно, или от систем дистанционного зондирования LIDAR или LADAR. [9] Количество времени, необходимое звуку или свету, чтобы пройти через воду, отразиться от морского дна и вернуться к эхолоту, информирует оборудование о расстоянии до морского дна. Исследования LIDAR/LADAR обычно проводятся с помощью бортовых систем.


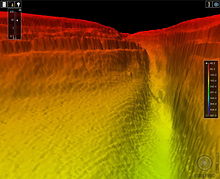
С начала 1930-х годов для составления батиметрических карт использовались однолучевые эхолоты. Сегодня обычно используются многолучевые эхолоты (MBES), в которых используются сотни очень узких соседних лучей (обычно 256), расположенных веерообразно с полосой обзора обычно от 90 до 170 градусов в поперечнике. Плотно упакованная матрица узких отдельных лучей обеспечивает очень высокое угловое разрешение и точность. В целом, широкая полоса обзора, зависящая от глубины, позволяет судну составить карту морского дна за меньшее время, чем однолучевой эхолот, совершив меньшее количество проходов. Лучи обновляются много раз в секунду (обычно 0,1–50 Гц в зависимости от глубины воды), что позволяет увеличить скорость лодки при сохранении 100% покрытия морского дна. лодки Датчики ориентации позволяют корректировать крен и наклон на поверхности океана, а гирокомпас предоставляет точную информацию о курсе для коррекции отклонения судна от курса . (В большинстве современных систем MBES используется интегрированный датчик движения и система положения, которая измеряет рыскание, а также другую динамику и положение.) Установленный на лодке Глобальная система позиционирования (GPS) (или другая глобальная навигационная спутниковая система (GNSS)) позиционирует зонды относительно поверхности земли. Профили скорости звука (скорость звука в воде как функция глубины) в толще воды корректируют преломление или «изгиб лучей» звуковых волн из-за неоднородных характеристик толщи воды, таких как температура, проводимость и давление. Компьютерная система обрабатывает все данные, корректируя все вышеперечисленные факторы, а также угол каждого отдельного луча. Результаты зондирования затем обрабатываются вручную, полуавтоматически или автоматически (в ограниченных случаях) для создания карты местности. По состоянию на 2010 год [update] генерируется ряд различных выходных данных, включая подмножество исходных измерений, которые удовлетворяют некоторым условиям (например, наиболее репрезентативные вероятные измерения, самое мелкое в регионе и т. д.) или интегрированные цифровые модели местности (DTM) (например, обычная или нерегулярная сетка точек, соединенных в поверхность). Исторически сложилось так, что выбор измерений был более распространен в гидрографических приложениях, в то время как построение ЦММ использовалось для инженерных изысканий, геологии, моделирования потоков и т. Д. Поскольку c. В 2003–2005 гг . ЦММ стали более широко применяться в гидрографической практике.
Спутники также используются для измерения батиметрии. Спутниковый радар составляет карту глубоководной топографии, обнаруживая тонкие изменения уровня моря, вызванные гравитационным притяжением подводных гор, хребтов и других масс. В среднем уровень моря выше над горами и хребтами, чем над абиссальными равнинами и впадинами. [10]
В Штатах Соединенных Инженерный корпус армии США выполняет или заказывает большинство исследований судоходных внутренних водных путей, а Национальное управление океанических и атмосферных исследований (НОАА) выполняет ту же роль в отношении океанских водных путей. Данные прибрежной батиметрии доступны в NOAA Национальном центре геофизических данных (NGDC). [11] который теперь объединен с Национальными центрами экологической информации . Батиметрические данные обычно относятся к приливно-отливным вертикальным данным . [12] Для глубоководной батиметрии это обычно средний уровень моря (MSL), но большинство данных, используемых для морских карт, относятся к среднему нижнему отливу (MLLW) в американских исследованиях и самому низкому астрономическому приливу (LAT) в других странах. многие другие данные На практике используются , в зависимости от местности и приливного режима.
Занятия или карьера, связанные с батиметрией, включают изучение океанов, горных пород и минералов на дне океана, а также изучение подводных землетрясений или вулканов. Проведение и анализ батиметрических измерений является одной из основных областей современной гидрографии и фундаментальным компонентом обеспечения безопасной перевозки грузов по всему миру. [8]
Спутниковые снимки [ править ]
Другая форма картографирования морского дна — использование спутников. Спутники оснащены гиперспектральными и мультиспектральными датчиками, которые используются для обеспечения постоянных потоков изображений прибрежных районов, что обеспечивает более реальный метод визуализации дна морского дна. [13]
Гиперспектральные датчики [ править ]
Наборы данных, создаваемые гиперспектральными (HS) датчиками, обычно охватывают от 100 до 200 спектральных полос с шириной полосы примерно 5–10 нм. Гиперспектральное зондирование, или визуализирующая спектроскопия, представляет собой комбинацию непрерывной удаленной визуализации и спектроскопии, позволяющую получить единый набор данных. [13] Двумя примерами такого рода зондирования являются AVIRIS ( бортовой видимый/инфракрасный спектрометр ) и HYPERION.
Применение датчиков HS для получения изображений морского дна заключается в обнаружении и мониторинге хлорофилла, фитопланктона, солености, качества воды, растворенных органических материалов и взвешенных отложений. Однако это не дает хорошей визуальной интерпретации прибрежной среды. [13] [ нужны разъяснения ]
Мультиспектральные датчики [ править ]
Другой метод спутниковой визуализации, мультиспектральная (МС) визуализация, имеет тенденцию делить ЭМ-спектр на небольшое количество полос, в отличие от его партнера - гиперспектральных датчиков, которые могут захватывать гораздо большее количество спектральных полос.
МС-зондирование чаще используется при картировании морского дна из-за меньшего количества спектральных диапазонов и относительно большей ширины полосы пропускания. Более широкая полоса пропускания обеспечивает больший спектральный охват, что имеет решающее значение для визуального обнаружения морских особенностей и общего спектрального разрешения полученных изображений. [13] [ нужны разъяснения ]
лазерная Воздушная батиметрия
Воздушная лазерная батиметрия высокой плотности (ALB) — это современный, высокотехнологичный подход к картированию морского дна. Впервые разработанный в 1960-х и 1970-х годах, [ нужна ссылка ] ALB — это «метод обнаружения и определения дальности света (LiDAR), который использует видимый, ультрафиолетовый и ближний инфракрасный свет для оптического дистанционного обнаружения контурной цели как с помощью активной, так и пассивной системы». Это означает, что воздушная лазерная батиметрия также использует свет за пределами видимого спектра для обнаружения изгибов подводного ландшафта. [13]
, LiDAR По данным Национального управления океанических и атмосферных исследований (Light Detection and Ranging) — это «метод дистанционного зондирования, который использует свет в виде импульсного лазера для измерения расстояний». [14] Эти световые импульсы вместе с другими данными создают трехмерное представление того, от чего отражаются световые импульсы, давая точное представление о характеристиках поверхности. Система LiDAR обычно состоит из лазера , сканера и GPS- приемника. Самолеты и вертолеты являются наиболее часто используемыми платформами для сбора данных LIDAR на обширных территориях. Одним из применений LiDAR является батиметрический LiDAR, который использует проникающий через воду зеленый свет для измерения возвышений морского дна и русла рек. [14]
ALB обычно работает в виде импульса невидимого света, излучаемого низколетящим самолетом, и приемника, регистрирующего два отражения от воды. Первый из которых берет свое начало с поверхности воды, а второй – со дна моря. Этот метод использовался в ряде исследований для картирования участков морского дна различных прибрежных территорий. [15] [16] [17]
коммерческих батиметрических Примеры LIDAR систем
Существуют различные батиметрические системы LIDAR, которые имеются в продаже. Двумя из этих систем являются сканирующая гидрографическая оперативная воздушная лидарная съемка (SHOALS) и лазерный бортовой эхолот (LADS). SHOALS был впервые разработан компанией Optech в 1990-х годах для помощи Инженерному корпусу армии США (USACE) в батиметрических съемках. SHOALS осуществляется посредством передачи лазера с длиной волны от 530 до 532 нм с высоты примерно 200 м со средней скоростью 60 м/с. [18]
высокого Ортофотоснимки разрешения
Ортоизображения высокого разрешения (HRO) — это процесс создания изображения, сочетающего геометрические качества с характеристиками фотографий. Результатом этого процесса является ортоизображение — масштабное изображение, включающее поправки, внесенные за смещение объектов, например наклон здания. Эти поправки вносятся за счет использования математического уравнения, информации о калибровке датчиков и применения цифровых моделей рельефа. [19]
Ортоизображение может быть создано путем объединения нескольких фотографий одной и той же цели. Цель фотографируется под разными углами, чтобы можно было оценить истинную высоту и наклон объекта. Это дает зрителю точное восприятие целевой области. [19]
Ортоизображения высокого разрешения в настоящее время используются в «программе наземного картографирования», целью которой является «получение топографических данных высокого разрешения от Орегона до Мексики». Ортоизображения будут использоваться для получения фотографических данных для этих регионов. [20]
История [ править ]
Самые ранние известные измерения глубины были сделаны египтянами около 1800 г. до н.э. путем зондирования шестом. Позже была использована взвешенная линия с интервалами, отмеченными глубинами. Этот процесс получил название зондирования. Оба эти метода были ограничены глубиной пятна, взятой в одной точке, и могли легко пропустить значительные изменения в непосредственной близости. На точность также влияло движение воды: течение могло отклонить вес от вертикали, что повлияет как на глубину, так и на положение. Это был трудоемкий и трудоемкий процесс, на который сильно влияли погодные и морские условия. [21]
Значительные улучшения произошли во время путешествия HMS Challenger в 1870-х годах, когда аналогичные системы с использованием тросов и лебедки использовались для измерения гораздо больших глубин, чем это было возможно ранее, но это оставалась процедурой по одной глубине, которая требовала очень низкой скорости для точности. . [22] Большие глубины можно было бы измерить с помощью утяжеленных тросов, развернутых и поднятых с помощью механических лебедок. Провода имели меньшее сопротивление и меньше подвергались воздействию тока, не так сильно растягивались и были достаточно прочными, чтобы выдерживать собственный вес на значительной глубине. Лебедки позволили ускорить развертывание и восстановление, что было необходимо, когда измеренная глубина составляла несколько километров. Исследования с проволокой продолжали использоваться до 1990-х годов из-за надежности и точности. Эта процедура включала буксировку кабеля двумя лодками, поддерживаемыми поплавками и утяжеленными для поддержания постоянной глубины. Трос зацеплялся за препятствия, глубина которых меньше глубины кабеля. Это было очень полезно для обнаружения навигационных опасностей, которые можно было не заметить при зондировании, но это было ограничено относительно небольшими глубинами. [21]
Однолучевые эхолоты использовались в 1920-1930-х годах для измерения расстояния до морского дна непосредственно под судном на относительно близких интервалах вдоль траектории движения. Прокладывая примерно параллельные линии, точки данных можно было собрать с лучшим разрешением, но этот метод по-прежнему оставлял промежутки между точками данных, особенно между линиями. [21] Картирование морского дна началось с использования звуковых волн , преобразованных в изобаты и ранние батиметрические карты топографии шельфа. Это дало первое представление о морфологии морского дна, хотя были допущены ошибки из-за точности горизонтального позиционирования и неточных глубин. Сонар бокового обзора был разработан в 1950-1970-х годах и мог использоваться для создания изображения дна, но в этой технологии не было возможности прямого измерения глубины по ширине сканирования. В 1957 году Мари Тарп в сотрудничестве с Брюсом Чарльзом Хизеном создала первую трёхмерную физико-географическую карту океанских бассейнов мира. Открытие Тарпа было сделано в идеальное время. Это было одно из многих открытий, произошедших примерно в то же время, что и изобретение компьютера . Компьютеры, с их способностью обрабатывать большие объемы данных, значительно облегчили исследования, в том числе исследования мирового океана. Развитие многолучевых систем позволило получать информацию о глубине по всей ширине полосы обзора гидролокатора, с более высоким разрешением, а с точными данными о положении и ориентации датчиков, позволило получить несколько зондирований с высоким разрешением за один проход. [21]
Океанографическое управление ВМС США разработало засекреченную версию многолучевой технологии в 1960-х годах. NOAA получило несекретную коммерческую версию в конце 1970-х годов и установило протоколы и стандарты. Данные, полученные с помощью многолучевого гидролокатора, значительно улучшили понимание морского дна. [21]
Американские спутники Landsat 1970-х годов, а затем и европейские спутники Sentinel предоставили новые способы поиска батиметрической информации, которую можно получить на основе спутниковых изображений. Эти методы включают использование разной глубины, на которую свет проникает в воду разной частоты. Когда вода прозрачна и морское дно имеет достаточную отражательную способность, глубину можно оценить, измеряя степень отражения, наблюдаемую спутником, а затем моделируя, насколько далеко должен проникать свет в известных условиях. Усовершенствованная система топографического лазерного альтиметра (ATLAS) на спутнике НАСА для измерения высоты над льдом, облаками и сушей 2 (ICESat-2) представляет собой лидар , подсчитывающий фотоны , который использует время возврата импульсов лазерного света от поверхности Земли для расчета высоты поверхности. . Измерения ICESat-2 можно объединить с данными судового гидролокатора, чтобы заполнить пробелы и повысить точность карт мелководья. [23]
При картировании топографии морского дна континентального шельфа с использованием данных дистанционного зондирования применялись различные методы для визуализации топографии дна. Ранние методы включали штриховые карты и обычно основывались на личной интерпретации картографом ограниченных доступных данных. Методы акустического картографирования, разработанные на основе изображений военного гидролокатора, позволили получить более яркую картину морского дна. Дальнейшее развитие технологий, основанных на гидролокаторах, позволило получить больше деталей и большее разрешение, а методы исследования грунта предоставляют информацию о том, что находится под поверхностью дна. Сбор данных с воздуха и спутников сделал возможным дальнейший прогресс в визуализации подводных поверхностей: аэрофотосъемка и ортоизображения с высоким разрешением являются мощным инструментом для картирования мелководных чистых вод на континентальных шельфах, а воздушная лазерная батиметрия с использованием отраженных световых импульсов также очень эффективна. в таких условиях гиперспектральные и мультиспектральные спутниковые датчики могут обеспечивать практически постоянный поток информации об окружающей среде бентоса. Методы дистанционного зондирования использовались для разработки новых способов визуализации динамической бентической среды, от общих геоморфологических особенностей до биологического охвата. [24]
Графики [ править ]

Батиметрическая карта — это тип изарифмической карты , на которой изображены подводная батиметрия и физико-географические особенности океанского и морского дна. [25] Их основная цель — предоставить подробные контуры глубины топографии океана, а также размер, форму и распределение подводных объектов.
Топографические карты отображают высоту над землей ( топографию ) и дополняют батиметрические карты. Батимерические диаграммы отображают глубину с помощью серии линий и точек через равные интервалы, называемых изобатами глубины (разновидность горизонталей ). Замкнутая форма со все более мелкими фигурами внутри может указывать на океанскую впадину, подводную гору или подводную гору, в зависимости от того, увеличивается или уменьшается глубина по мере продвижения внутрь. [26]
Батиметрические исследования и карты связаны с наукой океанографией , особенно морской геологией , подводной инженерией или другими специализированными целями.

См. также [ править ]
- Акустическая классификация морского дна . Разделение акустического изображения морского дна на отдельные физические объекты или классы.
- Батометр - научный прибор для измерения глубины воды.
- Батиметрическая карта - карта, изображающая затопленную местность водоемов.
- Прибрежная морфодинамика - Взаимодействие топографии морского дна береговой линии и гидродинамических процессов жидкости.
- Глубиномер - прибор, указывающий глубину ниже базовой поверхности.
- Общая батиметрическая карта океанов - общедоступная батиметрическая карта мирового океана.
- Глобальная модель рельефа - Модель рельефа Земли, включая высоту и глубину под водой.
- Гидрографические исследования - наука об измерении и описании особенностей, влияющих на морскую деятельность.
- Топография поверхности океана - форма поверхности океана относительно геоида.
- Морское дно – дно океана
- Рельеф – вертикальные и горизонтальные размеры и форма поверхности земли.
- Тальвег - линия самой низкой отметки в водотоке или долине.
Ссылки [ править ]
- ^ βαθύς , Генри Джордж Лидделл, Роберт Скотт, Греко-английский лексикон , о Персее
- ^ μέτρον , Генри Джордж Лидделл, Роберт Скотт, Греко-английский лексикон , о Персее
- ^ Вёльфль, AC; Снайт, Х.; Амирбрахими, С.; и др. (2019). «Картирование морского дна – задача поистине глобальной батиметрии океана» . Границы морской науки . 6 : 283. дои : 10.3389/fmars.2019.00283 .
- ^ Джонс, EJW (1999). Морская геофизика . Нью-Йорк: Уайли.
- ^ Джованни Коко, З. Чжоу, Б. ван Маанен, М. Олабарриета, Р. Тиноко, И. Тауненд. Морфодинамика приливных сетей: достижения и проблемы. Журнал морской геологии. 1 декабря 2013 г.
- ^ Сэндвелл, DT; Смит, WHF (7 июля 2006 г.). «Исследование океанских бассейнов по данным спутникового альтиметра» . НОАА/NGDC . Проверено 21 апреля 2007 г.
- ^ Шаретт, Мэтью А.; Смит, Уолтер Х.Ф. (июнь 2010 г.). «Объем земного океана» . Океанография . 23 (2): 112–114. дои : 10.5670/oceanog.2010.51 . hdl : 1912/3862 .
- ^ Jump up to: Перейти обратно: а б Одри, Ферлонг (7 ноября 2018 г.). «NGA объясняет: что такое гидрография?» . Национальное агентство геопространственной разведки на YouTube .
- ^ Олсен, Р.К. (2007), Дистанционное зондирование из воздуха и космоса (PDF) , SPIE, ISBN 978-0-8194-6235-0
- ^ Турман, Х.В. (1997), Вводная океанография , Нью-Джерси, США: Колледж Прентис Холл, ISBN 0-13-262072-3
- ^ «Батиметрия и глобальный рельеф» . www.ngdc.noaa.gov . Национальные центры экологической информации NOAA . Проверено 8 июля 2022 г.
- ^ «Модели прибрежных возвышенностей» . www.ngdc.noaa.gov . Национальные центры экологической информации NOAA. 15 сентября 2020 г. Проверено 8 июля 2022 г.
- ^ Jump up to: Перейти обратно: а б с д и Чарльз В. Финкл, редактор, 2016 г., « Картирование морского дна вдоль континентального шельфа: исследования и методы визуализации бентосной среды». Издание интернет-ресурса. Том 13. С. 31–35.
- ^ Jump up to: Перейти обратно: а б Национальное управление океанических и атмосферных исследований (НОАА) (15 апреля 2020 г.). «Что такое ЛИДАР?» . Национальная океаническая служба . Проверено 21 июня 2020 г.
- ^ Брок и Пуркис (2009). «Новая роль дистанционного зондирования лидаров в прибрежных исследованиях и управлении ресурсами». В: Брок Дж., Пуркис С. (ред.). «Прибрежные применения воздушного лидара». Журнал прибрежных исследований , специальный выпуск № 53: стр. 1–5.
- ^ Буката и др. (1995) Оптические свойства и дистанционное зондирование внутренних и прибрежных вод. CRC Press, Бока-Ратон, с. 365
- ^ Деронде и др. (2008). «Мониторинг динамики отложений вдоль песчаной береговой линии с помощью воздушного гиперспектрального дистанционного зондирования и лидара: пример из Бельгии». Процессы на поверхности Земли 33: стр. 280–294.
- ^ Чарльз В. Финкл, редактор, 2016, Картирование морского дна вдоль континентальных шельфов: исследования и методы визуализации донной среды. Издание интернет-ресурса. Том 13. с. 23
- ^ Jump up to: Перейти обратно: а б Геологическая служба США, дата последнего редактирования: 2015 г., ортоизображения высокого разрешения (HRO) , https://lta.cr.usgs.gov/high_res_ortho
- ^ Совет по защите океана штата Калифорния, 2009 г., Картирование ресурсов Калифорнии , http://www.opc.ca.gov/2009/12/mapping/
- ^ Jump up to: Перейти обратно: а б с д и «Подводные границы: краткая история картографирования морского дна» . www.arcgis.com . NCEI: Национальные центры экологической информации . Проверено 8 июля 2022 г.
- ^ Вельфль, Анн-Катрин; Снайт, Хелен; Амирбрахими, Сэм; Деви, Колин В.; Доршель, Борис; Феррини, Вики; Ювенн, Верле А.И.; Якобссон, Мартин; Дженкс, Дженнифер; Джонстон, Гордон; Ламарш, Жоффруа; Майер, Ларри; Миллар, Дэвид; Педерсен, Терье Хага; Пикард, Ким; Рейтц, Аня; Шмитт, Тьерри; Висбек, Мартин; Уэзералл, Полина; Вигли, Рошель (2019). «Картирование морского дна – задача поистине глобальной батиметрии океана» . Границы морской науки . 6 : 283. дои : 10.3389/fmars.2019.00283 . ISSN 2296-7745 .
- ^ Карлович, Майкл (2020). «Звук морского дна светом» . Earthobservatory.nasa.gov . НАСА . Проверено 8 июля 2022 г.
- ^ Финкл, Чарльз В.; Маковски, Кристофер, ред. (2016). Картирование морского дна вдоль континентальных шельфов: исследования и методы визуализации донной среды . Прибрежная исследовательская библиотека. Том. 13 (ред. Интернет-ресурса). стр. 3–53. дои : 10.1007/978-3-319-25121-9 . ISBN 978-3-319-25121-9 . ISSN 2211-0585 . S2CID 132980629 .
- ^ «Батиметрическая карта» . Британская энциклопедия . Проверено 17 декабря 2019 г.
- ^ «батиметрия» . Национальное географическое общество . 24 марта 2011 г. Проверено 17 декабря 2019 г.
Внешние ссылки [ править ]
- Средство просмотра батиметрических данных от NCEI NOAA
- Обзор подводной местности, форматов данных и т. д. (vterrain.org)
- Батиметрия высокого разрешения Большого Барьерного рифа и Кораллового моря.
- A.PO.MA.B.-Академия морского позиционирования и батиметрии
- Приложение WebMapping для поиска бесплатных наборов батиметрических данных с открытым исходным кодом.
- Интерактивная веб-карта, установка отрицательной отметки для батиметрии
- НОАА Исследователь океана
- Океанический институт Шмидта: картографирование морского дна
- Seafloormapping.co.uk
- Карта прибрежной батиметрии США, Канады, Европы и Австралии
- Морское дно 2030. Архивировано 16 июня 2019 г. на Wayback Machine.

