Самонастраивающийся модульный робот
Эта статья нуждается в дополнительных цитатах для проверки . ( февраль 2010 г. ) |
Модульные самореконфигурируемые робототехнические системы или самореконфигурируемые модульные роботы представляют собой автономные кинематические машины с изменяемой морфологией. с самореконфигурацией Помимо обычного приведения в действие, чувствительности и контроля, обычно присущих роботам с фиксированной морфологией, роботы также способны намеренно изменять свою форму, переставляя соединения своих частей, чтобы адаптироваться к новым обстоятельствам, выполнять новые задачи или восстанавливаться. от повреждений.
Например, робот, сделанный из таких компонентов, может принять червеобразную форму, чтобы двигаться по узкой трубе, собраться во что-то с паучьими ногами, чтобы преодолевать неровную местность, а затем сформировать третий произвольный объект (например, шар или колесо, которое может вращаться самостоятельно) для быстрого перемещения по достаточно ровной местности; его также можно использовать для создания «неподвижных» объектов, таких как стены, укрытия или здания.
В некоторых случаях это предполагает, что каждый модуль имеет 2 или более разъема для соединения нескольких модулей вместе. Они могут содержать электронику , датчики , компьютерные процессоры , память и источники питания ; они также могут содержать исполнительные механизмы , которые используются для управления их расположением в окружающей среде и по отношению друг к другу. Особенностью, обнаруживаемой в некоторых случаях, является способность модулей автоматически подключаться и отключаться друг от друга, а также формироваться во множество объектов или выполнять множество задач, перемещая или манипулируя окружающей средой.
Говоря «самореконфигурируемый» или «самореконфигурируемый», это означает, что механизм или устройство способны использовать свою собственную систему управления, например, с помощью приводов или стохастических средств, для изменения своей общей структурной формы. Наличие качества «модульности» в «самореконфигурируемой модульной робототехнике» означает, что один и тот же модуль или набор модулей можно добавлять в систему или удалять из нее, в отличие от общей «модуляризации» в более широком смысле. Основная цель состоит в том, чтобы иметь неопределенное количество идентичных модулей или конечный и относительно небольшой набор идентичных модулей в ячеистой или матричной структуре самореконфигурируемых модулей.
Самореконфигурация отличается от концепции самовоспроизведения , которая не является качеством, которым должен обладать самореконфигурируемый модуль или набор модулей. Матрица модулей не обязательно должна иметь возможность увеличивать количество модулей в своей матрице, чтобы считаться самореконфигурируемой. Достаточно, чтобы самореконфигурируемые модули производились на обычном заводе, где специальные машины штампуют или формуют компоненты, которые затем собираются в модуль и добавляются в существующую матрицу, чтобы дополнить ее для увеличения количества или замены изношенных. выходные модули.
Матрица, состоящая из многих модулей, может разделиться, образуя несколько матриц с меньшим количеством модулей, или они могут объединиться или рекомбинироваться, чтобы сформировать более крупную матрицу. Некоторые преимущества разделения на несколько матриц включают возможность одновременного решения нескольких и более простых задач в местах, удаленных друг от друга, переход через барьеры с отверстиями, которые слишком малы для того, чтобы одна большая матрица могла пройти, но не слишком малы для меньшей матрицы. фрагменты или отдельные модули, а также в целях энергосбережения за счет использования модулей, достаточных только для выполнения определенной задачи. Некоторыми преимуществами объединения нескольких матриц в одну является возможность формировать более крупные конструкции, такие как удлиненный мост, более сложные конструкции, такие как робот со многими руками или рука с большим количеством степеней свободы, а также увеличение прочности. Увеличение силы в этом смысле может быть в форме увеличения жесткости фиксированной или статической конструкции, увеличения чистой или коллективной силы для подъема, опускания, толкания или вытягивания другого объекта или другой части матрицы. или любая комбинация этих функций.
Существует два основных метода артикуляции сегментов, которые самореконфигурируемые механизмы могут использовать для изменения своей структуры: реконфигурация цепочки и реконфигурация решетки.
Структура и контроль
[ редактировать ]Модульные роботы обычно состоят из нескольких строительных блоков относительно небольшого набора с единообразными стыковочными интерфейсами, которые позволяют передавать механические силы и моменты, электрическую энергию и связь по всему роботу.
Модульные строительные блоки обычно состоят из некоторого основного структурного приводного устройства и, возможно, из дополнительных специализированных блоков, таких как захваты, опоры, колеса, камеры, полезная нагрузка, а также накопление и выработка энергии.
Таксономия архитектур
[ редактировать ]Модульные самореконфигурируемые роботизированные системы в целом можно разделить на несколько архитектурных групп по геометрическому расположению их блоков (решетка или цепочка). Некоторые системы демонстрируют гибридные свойства, а модульные роботы также подразделяются на две категории: изменение мобильной конфигурации (MCC) и передвижение всего тела (WBL). [1]

- В решетчатой архитектуре блоки соединяются своими стыковочными интерфейсами в точках с виртуальными ячейками некоторой регулярной сетки. Эту сеть точек стыковки можно сравнить с атомами в кристалле, а сетку — с решеткой этого кристалла. Следовательно, кинематические особенности решетчатых роботов можно охарактеризовать соответствующими им кристаллографическими группами смещений (киральными пространственными группами ). [2] Обычно для выполнения этапа реконфигурации достаточно нескольких устройств. Решетчатая архитектура позволяет упростить механическое проектирование, а также упростить вычислительное представление и планирование реконфигурации, которые можно легче масштабировать до сложных систем.
- Цепная архитектура не использует виртуальную сеть точек стыковки для своих устройств. Юниты могут достигать любой точки пространства и, следовательно, более универсальны, но для достижения определенной точки может потребоваться цепочка из многих блоков, что обычно затрудняет выполнение этапа реконфигурации. Такие системы также сложнее представлять и анализировать с вычислительной точки зрения.
- Гибридная архитектура использует преимущества обеих предыдущих архитектур. Управление и механизм предназначены для реконфигурации решетки, а также позволяют добраться до любой точки пространства.
Модульные робототехнические комплексы также можно классифицировать по способу переконфигурации (перемещения) агрегатов на место.
- Детерминированная реконфигурация основана на перемещении единиц или непосредственном манипулировании ими в целевое местоположение во время реконфигурации. Точное местоположение каждого подразделения всегда известно. Время реконфигурации может быть гарантировано, но для обеспечения точного манипулирования необходимо сложное управление с обратной связью. Макромасштабные системы обычно детерминированы.
- Стохастическая реконфигурация основана на перемещении единиц с помощью статистических процессов (например, броуновского движения). Точное местоположение каждого отряда известно только тогда, когда он соединен с основной структурой, но для перемещения между локациями могут использоваться неизвестные пути. Время реконфигурации может быть гарантировано только статистически. Стохастические архитектуры более выгодны на микромасштабах.
Модульные робототехнические системы также принято классифицировать в зависимости от конструкции модулей.
- Гомогенные модульные робототехнические системы состоят из множества модулей одинаковой конструкции, образующих структуру, подходящую для выполнения требуемой задачи. Преимущество перед другими системами заключается в том, что их легко масштабировать по размеру (и, возможно, по функциям) путем добавления дополнительных модулей. Обычно описываемым недостатком является ограничение функциональности: этим системам часто требуется больше модулей для достижения заданной функции, чем гетерогенным системам.
- Гетерогенные модульные робототехнические системы состоят из разных модулей, каждый из которых выполняет специализированные функции, образуя структуру, подходящую для выполнения задачи. Преимуществом является компактность и универсальность при проектировании и добавлении модулей для выполнения любых задач. Обычно описываемым недостатком является увеличение сложности методов проектирования, производства и моделирования.
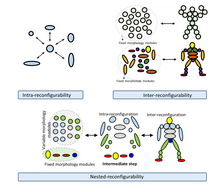
Концептуальное представление внутри-, интер- и вложенной реконфигурации в соответствии с таксономией реконфигурируемых роботов.

Существуют и другие модульные роботизированные системы, которые не подлежат самостоятельной реконфигурации и, следовательно, формально не принадлежат к этому семейству роботов, хотя могут иметь схожий внешний вид. Например, самособирающиеся системы могут состоять из нескольких модулей, но не могут динамически контролировать их целевую форму. Точно так же робототехника тенсегрити может состоять из множества взаимозаменяемых модулей, но не может самостоятельно переконфигурироваться. Самореконфигурируемые роботизированные системы обладают возможностью реконфигурации по сравнению с их аналогами с фиксированной морфологией, и это можно определить как степень/степень, в которой самореконфигурируемый робот или роботизированные системы могут трансформироваться и развиваться в другую значимую конфигурацию с определенной степенью автономии или человеческого участия. вмешательство. [3] Реконфигурируемые системы также можно классифицировать по механизму реконфигурируемости.
- Под внутренней реконфигурацией роботов понимается система, которая представляет собой единое целое, но при этом имеет возможность изменять морфологию без сборки/разборки.
- Взаимная реконфигурируемость определяется тем, в какой степени роботизированная система может изменить свою морфологию путем сборки или разборки своих компонентов или модулей.
- Вложенная реконфигурируемость для робототехнической системы представляет собой совокупность модульных роботов с индивидуальными характеристиками реконфигурации (внутриреконфигурируемость), которые сочетаются с другими однородными или гетерогенными модулями робота (внутриреконфигурируемость).
Мотивация и вдохновение
[ редактировать ]Существует две ключевые мотивации для разработки модульных самореконфигурируемых роботизированных систем.
- Функциональное преимущество : роботизированные системы с самореконфигурацией потенциально более надежны и более адаптивны , чем традиционные системы. Способность реконфигурации позволяет роботу или группе роботов разбирать и собирать машины для формирования новых морфологий, которые лучше подходят для новых задач, таких как переход от ножного робота к роботу-змее ( snakebot ), а затем к катящемуся роботу. Поскольку детали робота взаимозаменяемы (внутри робота и между разными роботами), машины также могут заменять неисправные детали автономно, что приводит к самостоятельному ремонту.
- Экономическое преимущество : роботизированные системы с самостоятельной реконфигурацией потенциально могут снизить общую стоимость роботов за счет создания целого ряда сложных машин из одного (или относительно небольшого) типа модулей массового производства.
Оба эти преимущества еще не реализованы в полной мере. Модульный робот, скорее всего, будет уступать по производительности любому индивидуальному роботу, предназначенному для конкретной задачи. Однако преимущество модульной робототехники становится очевидным только при рассмотрении нескольких задач, для которых обычно требуется набор разных роботов.
Дополнительные степени свободы делают модульных роботов более универсальными в своих потенциальных возможностях, но также влекут за собой компромисс в производительности и повышенную механическую и вычислительную сложность.
Поиски самореконфигурируемых роботизированных структур в некоторой степени вдохновлены предполагаемыми приложениями, такими как долгосрочные космические миссии, которые требуют долгосрочной самоподдерживающейся роботизированной экологии, которая может справляться с непредвиденными ситуациями и может требовать самостоятельного ремонта. Вторым источником вдохновения являются биологические системы, которые самостоятельно конструируются из относительно небольшого набора строительных блоков более низкого уровня (клеток или аминокислот, в зависимости от масштаба интересов). Эта архитектура лежит в основе способности биологических систем физически адаптироваться, расти, исцеляться и даже самовоспроизводиться – возможности, которые были бы желательны во многих инженерных системах.
Области применения
[ редактировать ]Учитывая эти преимущества, где будет использоваться модульная самореконфигурируемая система? Несмотря на то, что система обещает быть способной выполнять самые разнообразные задачи, найти « убийственное применение » оказалось несколько трудно. Вот несколько примеров:
Исследование космоса
[ редактировать ]Одним из применений, которое подчеркивает преимущества самореконфигурируемых систем, являются долгосрочные космические миссии. [4] Для этого требуется долгосрочная самоподдерживающаяся роботизированная экология, которая может справиться с непредвиденными ситуациями и может потребовать самостоятельного ремонта. Самореконфигурируемые системы способны решать задачи, которые заранее неизвестны, особенно по сравнению с системами с фиксированной конфигурацией. Кроме того, космические миссии сильно ограничены по объему и массе. Отправка роботизированной системы, которая может перенастраиваться для выполнения множества задач, может быть более эффективной, чем отправка множества роботов, каждый из которых может выполнять одну задачу.
Телепарио
[ редактировать ]Другой пример приложения был придуман профессорами КМУ Тоддом Моури и Сетом Гольдштейном как «телепарио». Исследователи предлагают сделать движущиеся, физические,трехмерные копии людей или объектов, настолько реалистичные, что человеческие чувства воспринимают их как настоящие. Это устранило бы необходимость в громоздком оборудовании виртуальной реальности и позволило бы преодолеть ограничения по углу обзора, присущие современным 3D-подходам. Реплики будут имитировать форму и внешний вид человека или объекта, отображаемого в реальном времени, а по мере движения оригиналов будут перемещаться и их копии. Одним из аспектов этого приложения является то, что основным направлением разработки является геометрическое представление, а не приложение сил к окружающей среде, как в типичной задаче манипулирования роботом. Этот проект широко известен как Claytronics. [5] или Программируемая материя (отметим, что программируемая материя — это гораздо более общий термин, охватывающий также функциональные программируемые материалы).
Ведро вещей
[ редактировать ]Третье долгосрочное видение этих систем получило название «ведро с вещами», которое представляет собой контейнер, наполненный модульными роботами, которые могут принимать команды пользователя и принимать соответствующую форму для выполнения домашних дел. [6] [7]
История и современное состояние
[ редактировать ]Корни концепции модульных самореконфигурируемых роботов можно проследить до «быстросменных» концевых исполнительных механизмов и автоматических устройств смены инструмента в обрабатывающих центрах с числовым программным управлением в 1970-х годах. Здесь специальные модули, каждый из которых имеет общий механизм соединения, могут автоматически заменяться на конце роботизированной руки. Однако базовая концепция общего механизма подключения и применение ее ко всему роботу была представлена Тошио Фукудой в CEBOT (сокращение от сотового робота) в конце 1980-х годов.
В начале 1990-х годов дальнейшее развитие получили Грегори С. Чирикджян , Марк Йим, Джозеф Майкл и Сатоши Мурата. Чирикджян, Майкл и Мурата разработали системы реконфигурации решетки, а Йим разработал систему, основанную на цепочках. В то время как эти исследователи начали с акцента на машиностроение, проектирование и создание модулей, а затем разработку кода для их программирования, работа Даниэлы Рус и Вэй-мин Шена развивала аппаратное обеспечение, но оказала большее влияние на аспекты программирования. Они положили начало тенденции к доказуемым или проверяемым распределенным алгоритмам для управления большим количеством модулей.
Одной из наиболее интересных аппаратных платформ в последнее время стали системы MTRAN II и III, разработанные Сатоши Мурата и др. Эта система представляет собой гибрид цепочки и решетки. Его преимущество заключается в том, что он позволяет легче решать задачи, как цепные системы, но при этом переконфигурировать его, как решетчатую систему.
Совсем недавно новые попытки стохастической самосборки были предприняты Ходом Липсоном и Эриком Клавинсом. Крупные усилия в Университете Карнеги-Меллон, возглавляемые Сетом Гольдштейном и Тоддом Моури, начали изучать проблемы разработки миллионов модулей.
Было показано, что многие задачи достижимы, особенно с модулями реконфигурации цепочки. Это демонстрирует универсальность этих систем, однако два других преимущества, надежность и низкая стоимость, не были продемонстрированы. В целом прототипы систем, разработанные в лабораториях, были хрупкими и дорогими, как и следовало ожидать на начальном этапе разработки.
Растет число исследовательских групп, активно участвующих в исследованиях в области модульной робототехники. На сегодняшний день спроектировано и построено около 30 систем, некоторые из которых показаны ниже.
| Система | Класс, ГРИП | Автор | Год |
|---|---|---|---|
| СЕБОТ | мобильный | Фукуда и др. (Цукуба) | 1988 |
| Полипод | Цепочка, 2, 3Д | Йим (Стэнфорд) | 1993 |
| Метаморфический | Решетка, 6, 2Д | Чирикджян (Калифорнийский технологический институт) | 1993 |
| Сломанный | Решетка, 3 2Д | Мурата (МЕЛ) | 1994 |
| Фрактальные роботы | Решетка, 3Д | Майкл (Великобритания) [8] [9] | 1994 |
| Тетробот | Цепочка, 1 3D | Хэмлайн и др. (RPI) | 1996 |
| 3D фракта | Решетка, 6 3D | Мурата и др. (МЕД) | 1998 |
| Молекула | Решетка, 4 3D | Котай и Рус (Дартмут) | 1998 |
| КОНРО | Цепь, 2 3D | Уилл и Шен (USC/ISI) | 1998 |
| ПолиБот | Цепочка, 1 3D | Йим и др. (ПАРК) | 1998 |
| ТелеКуб | Решетка, 6 3D | Су и др. (PARC) | 1998 |
| Вертикальный | Решетка, 2D | Хосакава и др. (Рикен) | 1998 |
| Кристаллический | Решетка, 4 2Д | Vona & Rus, (Dartmouth) | 1999 |
| Я-куб | Решетка, 3Д | Унсал, (КМУ) | 1999 |
| Микро Блок | Решетка, 2 2Д | Murata et al.(AIST) | 1999 |
| М-ТРАН I | Гибрид, 2 3D | Murata et al.(AIST) | 1999 |
| Пневматический | Решетка, 2D | Иноу и др. (TiTech) | 2002 |
| Юни Ровер | Мобильная, 2 2Д | Хиросе и др. (TiTech) | 2002 |
| М-ТРАН II | Гибрид, 2 3D | Murata et al., (AIST) | 2002 |
| Атрон | Решетка, 1 3D | Stoy et al., (U.S Denmark) | 2003 |
| S-бот | Мобильная, 3 2Д | Мондада и др. (EPFL) | 2003 |
| Стохастический | Решетка, 0 3D | Уайт, Копански, Липсон (Корнелл) | 2004 |
| Супербот | Гибрид, 3D | Шен и др. (USC/ISI) | 2004 |
| Модули Y1 | Цепочка, 1 3D | Гонсалес-Гомес и др. (UAM) | 2004 |
| М-ТРАН III | Гибрид, 2 3D | Kurokawa et al., (AIST) | 2005 |
| АМЕБА-I | Mobile, 7 3D | Лю Дж.Г. и др. (SIA) | 2005 |
| катом | Решетка, 0 2D | Гольдштейн и др. (CMU) | 2005 |
| Стохастик-3D | Решетка, 0 3D | Уайт, Зыков, Липсон (Корнелл) | 2005 |
| Молекубы | Гибрид, 1 3D | Zykov, Mytilinaios, Lipson (Cornell) | 2005 |
| Прог. части | Решетка, 0 2D | Клавинс (Университет Вашингтона) | 2005 |
| Микрованна [10] | Цепочка, 2 2D | Брунете, Эрнандо, Гамбао (UPM) | 2005 |
| Саженцы | Решетка, 0 3D | Рус и др., (MIT) | 2006 |
| Модули GZ-I | Цепочка, 1 3D | Чжан и Гонсалес-Гомез (Университет Гамбурга, UAM) | 2006 |
| Распределенный полетный массив | Решетка, 6 3D | Оунг и Д'Андреа (ETH Цюрих) | 2008 |
| Эволюционировать | Цепь, 2 3D | Чанг Фаньси, Фрэнсис (Нью-Йорк) | 2008 |
| ЭМ-Куб | Решетка, 2 2Д | Ан (Лаборатория компьютерных наук Драна) | 2008 |
| Роботы | Гибрид, 3D | Шпроевиц, Мёкель, Эйспирт, Лаборатория биоробототехники (EPFL) | 2009 |
| Программируемая материя путем складывания | Лист, 3D | Вуд, Рус, Демейн и др. (Гарвард и Массачусетский технологический институт) | 2010 |
| Самбот | Гибрид, 3D | ХайЮань Ли, Хунсин Вэй, ТяньМяо Ван и др. (Бэйханский университет) | 2010 |
| Мода | Гибрид, 1 3D | Центр битов и атомов (MIT) | 2011 |
| МодRED | Цепочка, 4 3D | Лаборатория C-MANTIC, (UNO/UNL) | 2011 |
| Программируемый смарт-лист | Лист, 3D | Ан и Рус, (MIT) | 2011 |
| СМОРЕС | Гибрид, 4, 3Д | Дэйви, Квок, Йим (UNSW, UPenn) | 2012 |
| Симбрион | Гибрид, 3D | Проекты ЕС Symbrion и Replicator [11] | 2013 |
| ReBiS — реконфигурируемая двуногая змея [12] | Цепочка, 1, 3Д | Рохан, Аджинкья, Сачин, С. Чиддарвар, К. Бхурчанди (ВНИТ, Нагпур) | 2014 |
| Мягкий мод. Роб. Кубики | Решетка, 3Д | Вергара, Шэн, Мендоса-Гарсия, Загал (UCile) | 2017 |
| Космический двигатель | Гибрид, 3D | Руке Керагала (3rdVector, Нью-Йорк) | 2018 |
| Омни-Пи-палатка | Гибрид, 3D | Пек, Тиммис, Тиррелл (Йоркский университет) | 2019 |
| Пантера [13] | Мобильная, 1Д | Элара, Пратхап, Хаят, Парвин (SUTD, Сингапур) | 2019 |
| AuxBots [14] | Цепь, 3Д | Чин, Бернс, Се, Рус (MIT, США) | 2023 |
Некоторые современные системы
[ редактировать ]
- ПолиБот G3 (2002)
Система самореконфигурации цепи. Каждый модуль имеет длину стороны около 50 мм и одну вращающуюся степень свободы. Он является частью семейства модульных роботов PolyBot, которые продемонстрировали множество способов передвижения, включая ходьбу: двуногое, 14-ногое, гибкое, змееподобное: гармошкой в норе суслика, походку дюймового червя, прямолинейную волнообразную и извилистую походку, перекатывание, как у суслика. шагать со скоростью до 1,4 м/с, кататься на трехколесном велосипеде, карабкаться по лестницам, столбам, трубам, пандусам и т. д. Более подробную информацию можно найти на веб-странице полибота в PARC. [15]
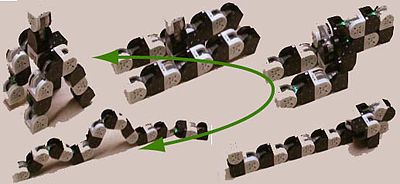
- М-ТРАН III (2005)
Самореконфигурируемая система гибридного типа. Каждый модуль имеет размер два куба (сторона 65 мм) и имеет 2 вращающиеся степени свободы и 6 плоских поверхностей для подключения. Это третий прототип M-TRAN. По сравнению с предыдущим (M-TRAN II) скорость и надежность соединения значительно улучшены. В качестве системы цепного типа M-TRAN II продемонстрировал передвижение с помощью контроллера CPG (центрального генератора шаблонов) в различных формах. Будучи системой решетчатого типа, она может менять свою конфигурацию, например, с четырехногого ходунка на гусеничного робота. См. веб-страницу M-TRAN на сайте AIST. [16]
- АМОЕБА-I (2005)
AMOEBA-I, трехмодульный реконфигурируемый мобильный робот, был разработан в Шэньянском институте автоматизации (SIA) Китайской академии наук (CAS) Лю JG и др. [1] [2] .AMOEBA-I имеет девять видов неизоморфных конфигураций и высокую мобильность в неструктурированной среде. Разработаны четыре поколения его платформы и проведен ряд исследований механизма их реконфигурации, неизоморфных конфигураций, устойчивости к опрокидыванию и планирования реконфигурации. Эксперименты показали, что такая конструкция обеспечивает хорошую мобильность и высокую гибкость на неровной местности. Будучи сверхизбыточным, модульным и реконфигурируемым, AMOEBA-I имеет множество возможных применений, таких как городской поиск и спасение (USAR) и исследование космоса.Ref_1: см. [3] ;Ссылка_2: см. [4]
Стохастик-3D (2005)
Высокое пространственное разрешение для формирования произвольных трехмерных форм с помощью модульных роботов может быть достигнуто с использованием решетчатой системы с большим количеством очень маленьких, потенциально микроскопических модулей. В небольших масштабах и при большом количестве модулей детерминированный контроль над реконфигурацией отдельных модулей станет невозможным, в то время как стохастические механизмы, естественно, будут преобладать. Микроскопические размеры модулей сделают невозможным использование электромагнитного управления и межсоединения, а также использование бортовых накопителей энергии.
Три крупномасштабных прототипа были построены в попытке продемонстрировать динамически программируемую трехмерную стохастическую реконфигурацию в среде с нейтральной плавучестью. В первом прототипе для реконфигурации и соединения модулей использовались электромагниты. Модули представляли собой кубики размером 100 мм и весили 0,81 кг. Во втором прототипе использовался механизм стохастической жидкостной реконфигурации и взаимосвязи. Его кубические модули объемом 130 мм весили по 1,78 кг каждый и делали эксперименты по реконфигурации чрезмерно медленными. Текущая третья реализация наследует принцип плавной реконфигурации. Размер решетки составляет 80 мм, проводятся эксперименты по реконфигурации. [17]

Молекубы (2005)
Эта гибридная самореконфигурируемая система была построена Корнеллской лабораторией вычислительного синтеза для физической демонстрации искусственного кинематического самовоспроизведения. Каждый модуль представляет собой куб массой 0,65 кг с длиной ребер 100 мм и одной вращательной степенью свободы. Ось вращения совпадает с самой длинной диагональю куба. Было продемонстрировано физическое самовоспроизведение как трех-, так и четырехмодульного робота. [18] Было также показано, что, несмотря на гравитационные ограничения, из Молекубов можно построить бесконечное количество самовоспроизводящихся цепных метаструктур. Более подробную информацию можно найти на Creative Machines Lab странице самовоспроизведения .
Программируемые части (2005)
Программируемые части беспорядочно перемешиваются на аэрохоккейном столе случайно активируемыми воздушными струями. Когда они сталкиваются и слипаются, они могут общаться и решать, оставаться ли им застрявшими или же отсоединиться и когда это сделать. Локальные правила взаимодействия могут быть разработаны и оптимизированы, чтобы роботы могли создавать любую желаемую глобальную форму. Более подробную информацию можно найти на веб-странице программируемых деталей .
СуперБот (2006)
Модули SuperBot относятся к гибридной архитектуре. Модули имеют по три степени свободы каждый. Конструкция основана на двух предыдущих системах: Conro (разработанной той же исследовательской группой) и MTRAN (разработанной Мурата и др.). Каждый модуль может подключаться к другому модулю через один из шести док-разъемов. Они могут общаться и делиться энергией через док-разъемы. Для различных компоновок модулей было разработано несколько алгоритмов передвижения. Для связи на высоком уровне модули используют гормональный контроль — распределенный масштабируемый протокол, который не требует, чтобы модули имели уникальные идентификаторы.
Саженцы (2006)
Система Мише представляет собой модульную решетчатую систему, способную формировать произвольную форму. Каждый модуль представляет собой автономный модуль робота, способный подключаться и общаться со своими непосредственными соседями. Собранные в структуру модули образуют систему, которую можно виртуально моделировать с помощью компьютерного интерфейса и распределенного процесса. Группа модулей коллективно решает, кто находится на финальной форме, а кто не использует алгоритмы, минимизирующие передачу и хранение информации. Наконец, модули, не входящие в конструкцию, отпускают и падают под контролем внешней силы, в данном случае гравитации.Подробности у Мише (Русь и др.).

Распределенный полетный массив (2009)
Distributed Flight Array — это модульный робот, состоящий из однороторных блоков шестиугольной формы, которые могут принимать практически любую форму. Хотя каждый агрегат способен генерировать достаточную тягу, чтобы оторваться от земли, сам по себе он не способен летать, так же как вертолет не может летать без рулевого винта. Однако при объединении эти агрегаты превращаются в сложную мультироторную систему, способную координировать полет и многое другое. Более подробную информацию можно найти на сайте DFA. [19]
Роботы (2009)
Роботы [20] имеют гибридную архитектуру. Каждый модуль имеет три степени свободы, две из которых используют диаметральную ось внутри правильного куба, а третья (центральная) ось вращения соединяет две сферические части. Все три оси непрерывно вращаются. Внешняя глубина резкости Roombots использует ту же ориентацию оси, что и Molecubes, третья, центральная ось Roombots позволяет модулю вращать две внешние степени свободы друг против друга. Эта новая функция позволяет одному модулю Roombots передвигаться по ровной местности, а также взбираться на стену или пересекать вогнутый, перпендикулярный край. Выпуклые края требуют сборки как минимум двух модулей в «Метамодуль» румбота. Каждый модуль имеет десять доступных разъемов для подключения, на данный момент два из них оснащены механизмом активного подключения на основе механических защелок.Роботы-румботы предназначены для решения двух задач: в конечном итоге придавать форму предметам повседневной жизни, например, мебели, и передвигаться, например, в виде четвероногого робота или робота-треножника, состоящего из нескольких модулей.Более подробную информацию можно найти на веб-странице Roombots. [21]
Самбот (2010)
Вдохновленная социальными насекомыми, многоклеточными организмами и морфогенетическим роботами, цель самбота [22] заключается в разработке роевой робототехники и проведении исследований роевого интеллекта , самосборки и совместной эволюции тела и мозга для автономных морфогенетических процессов. В отличие от роевого робота, самореконфигурируемого робота и морфогенетического робота, исследование сосредоточено на самособирающихся роевых модульных роботах, которые взаимодействуют и стыкуются как автономный мобильный модуль с другими для достижения роевого интеллекта и дальнейшего обсуждения автономной конструкции космической станции и исследовательских инструментов. и искусственные сложные конструкции. Каждый робот Sambot может двигаться как автономный человек на колесе, а также, используя комбинацию датчиков и механизма стыковки, робот может взаимодействовать и стыковаться с окружающей средой и другими роботами. Благодаря преимуществу движения и связи стаи самботов могут объединяться в симбиотический или целый организм и генерировать передвижение как бионические суставные роботы. В этом случае в представлении проектирования и приложения доступны некоторые функции самосборки, самоорганизации, самореконфигурации и самовосстановления, а также исследования. Внутри модульного робота размерами 80(Ш)Х80(Д)Х102(В) мм встроены MCU (ARM и AVR), связь (Zigbee), датчики, питание, IMU, модули позиционирования.Более подробную информацию можно найти в разделе «Модульные роботы Swarm для самостоятельной сборки». [23]

- Мода (2011)
Математически доказано, что физические струны или цепочки простой формы можно сложить в любую непрерывную область или объемную форму. Мотеины используют такие универсальные по форме стратегии складывания с одной (для 2D-фигур) или двумя (для 3D-фигур) степенями свободы и простыми приводами с двумя (для 2D-фигур) или тремя (для 3D-форм) состояниями. за единицу. [24]
- Симбрион (2013)
Symbrion (Симбиотические эволюционные роботизированные организмы) — это проект, финансируемый Европейской комиссией в период с 2008 по 2013 год с целью разработки структуры, в которой однородный рой миниатюрных взаимозависимых роботов может объединяться в более крупный роботизированный организм для получения импульса для решения проблем. Один из ключевых аспектов Symbrion вдохновлен биологическим миром: искусственный геном, позволяющий хранить и развивать неоптимальные конфигурации с целью увеличения скорости адаптации. Большая часть разработок Symbrion имеет открытый исходный код и открытое оборудование. [25]
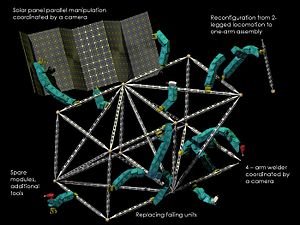
- Космический двигатель (2018)
Space Engine — автономная кинематическая платформа с изменяемой морфологией, способная создавать или манипулировать физическим пространством (жилым пространством, рабочим пространством, пространством отдыха). Генерирует собственную разнонаправленную кинетическую силу для манипулирования объектами и выполнения задач.
По крайней мере, 3 или более замков для каждого модуля, способных автоматически прикрепляться или отсоединяться от ближайших модулей для образования жестких конструкций. Модули движутся линейно вперед или назад только в пространственных плоскостях X, Y или Z, создавая при этом свои собственные силы импульса, способные двигаться за счет контролируемого изменения давления, создаваемого между одним или несколькими непосредственными модулями.
Использование магнитного давления для притяжения и/или отталкивания своими непосредственными модулями. В то время как движущий модуль использует свои электромагниты, чтобы тянуть или толкать вперед вдоль дороги, созданной статистическими модулями, статистические модули тянут или толкают движущие модули вперед. Увеличение количества модулей перемещения также увеличивает общий импульс или силу тяги/толкания. Количество электромагнитов на каждом модуле может меняться в зависимости от требований конструкции.
Модули на внешней стороне матриц не могут самостоятельно перемещаться из-за отсутствия одной или нескольких граней реакции у непосредственных модулей. Они перемещаются путем прикрепления к модулям внутри матриц, которые могут образовывать полноценную дорогу для перемещения.
- Объем космического двигателя
 Объем космического двигателя
Объем космического двигателя Конструкция камеры космического двигателя в невесомости
Конструкция камеры космического двигателя в невесомости Конструкция гравитационной ячейки космического двигателя
Конструкция гравитационной ячейки космического двигателя



Количественное достижение
[ редактировать ]- Робот с наибольшим количеством активных модулей имеет 56 единиц <полибот-сороконожка, PARC>
- Самый маленький приводной модульный блок имеет размер 12 мм. [26]
- Самая большая срабатываемая модульная установка (по объёму) имеет размер 8 м^3 <(GHFC)гигантские гелиевые катомы, CMU>
- Самые сильные исполнительные модули способны поднять 5 одинаковых горизонтально консольных модулей.<PolyBot g1v5, PARC>
- Самый быстрый модульный робот может двигаться со скоростью 23 единицы измерения в секунду.<CKbot, Dynamic Rolling, ISER'06>
- Самая крупная моделируемая система содержала многие сотни тысяч единиц. [27] [28]
Проблемы, решения и возможности
[ редактировать ]С момента первых демонстраций первых модульных самореконфигурируемых систем размер, надежность и производительность постоянно улучшались. Параллельно развивались алгоритмы планирования и контроля, позволяющие обрабатывать тысячи единиц. Однако есть несколько ключевых шагов, которые необходимы для того, чтобы эти системы реализовали свои обещания по адаптивности, надежности и низкой стоимости . Эти шаги можно разбить на задачи, связанные с разработкой аппаратного обеспечения, алгоритмами планирования и управления и применением. Эти проблемы часто переплетаются.
Проблемы проектирования оборудования
[ редактировать ]Степень реализации перспектив самореконфигурации роботизированных систем в решающей степени зависит от количества модулей в системе. На сегодняшний день продемонстрированы только системы, насчитывающие до 50 единиц, причем это число остается неизменным в течение почти десятилетия. Существует ряд фундаментальных ограничивающих факторов, которые определяют это число:
- Ограничения на прочность, точность и устойчивость к полевым нагрузкам (как механическим, так и электрическим) интерфейсов соединения/стыковки между модулями.
- Ограничения на мощность двигателя, точность движения и энергетическую эффективность агрегатов (т. е. удельную мощность, удельный крутящий момент)
- Проектирование аппаратного/программного обеспечения. Аппаратное обеспечение, предназначенное для облегчения решения проблем с программным обеспечением. Самореконфигурируемые системы имеют более тесно связанные аппаратное и программное обеспечение, чем любая другая существующая система.
Проблемы планирования и контроля
[ редактировать ]Хотя алгоритмы были разработаны для обработки тысяч единиц в идеальных условиях, проблемы с масштабируемостью остаются как на низкоуровневом контроле, так и на высокоуровневом планировании для преодоления реалистичных ограничений:
- Алгоритмы параллельного движения для крупномасштабных манипуляций и передвижения.
- Алгоритмы для надежной обработки различных режимов отказа: от смещений, неисправных блоков (не реагирующих, не отпускающих) до блоков, которые ведут себя хаотично.
- Алгоритмы, определяющие оптимальную конфигурацию для поставленной задачи
- Алгоритмы оптимального (времени, энергии) плана реконфигурации
- Эффективная и масштабируемая (асинхронная) связь между несколькими устройствами
Проблемы применения
[ редактировать ]Хотя преимущества модульных самореконфигурируемых роботизированных систем широко признаны, было сложно определить конкретные области применения, где преимущества можно продемонстрировать в краткосрочной перспективе. Некоторые предлагаемые приложения:
- Приложения для исследования космоса и космической колонизации , например, колонизация Луны.
- Строительство крупных архитектурных систем
- Глубоководная разведка/добыча полезных ископаемых
- Поиск и спасение в неструктурированной среде
- Быстрое изготовление произвольных инструментов с учетом ограничений по размеру и весу
- Приюты для оказания помощи при стихийных бедствиях для перемещенных лиц
- Приюты для бедных районов, для сборки которых не требуется большого опыта на местах
Грандиозные испытания
[ редактировать ]В нескольких областях робототехники были определены большие задачи , которые служат катализатором развития и служат краткосрочной целью в отсутствие немедленных убийственных приложений . «Большой вызов» сам по себе не является исследовательской программой или важной вехой, а средством стимулирования и оценки скоординированного прогресса на многих технических фронтах. В области модульной самореконфигурируемой робототехники было предложено несколько грандиозных задач:
- Демонстрация системы с более чем 1000 единицами . Физическая демонстрация такой системы неизбежно потребует переосмысления ключевых аппаратных и алгоритмических проблем, а также обработки шума и ошибок.
- Робосфера . Самоподдерживающаяся роботизированная система, изолированная на длительный период времени (1 год), которой необходимо поддерживать работу и выполнять непредвиденные задачи без присутствия человека.
- Самовоспроизведение Система со многими модулями, способными к самовоспроизведению путем сбора разбросанных строительных блоков, потребует решения многих аппаратных и алгоритмических проблем.
- Ultimate Construction Система, способная создавать объекты из компонентов, скажем, стены.
- Аналогия с биофильтром. Если когда-нибудь систему сделают достаточно маленькой, чтобы ее можно было вводить млекопитающему, одной из задач может стать мониторинг молекул в кровотоке и пропускать одни молекулы, а другие нет, что-то вроде гематоэнцефалического барьера . В качестве задачи можно провести аналогию, в которой система должна быть способна:
- вставить в отверстие диаметром один модуль.
- Пройдите определенное расстояние по каналу, площадь которого, скажем, составляет примерно 40 x 40 диаметров модуля.
- образуют барьер, полностью соответствующий каналу (форма которого неправильная и заранее неизвестная).
- разрешить некоторым объектам проходить, а другим нет (не в зависимости от размера).
- Поскольку зондирование не является целью данной работы, фактическое обнаружение проходимых объектов должно быть тривиальным.
Индуктивные преобразователи
[ редактировать ]Уникальным потенциальным решением, которое можно использовать, является использование индукторов в качестве преобразователей. Это может быть полезно для решения проблем со стыковкой и соединением. В то же время он также может быть полезен благодаря своим возможностям обнаружения стыковки (выравнивания и определения расстояния), передачи энергии и связи (сигнала данных). Видео, подтверждающее концепцию, можно посмотреть здесь . Довольно ограниченные исследования в этом направлении, вероятно, являются следствием исторического отсутствия необходимости в каких-либо приложениях такого подхода.
Группы Google
[ редактировать ]Self-Reconfiguring and Modular Technology — группа для обсуждения восприятия и понимания развивающейся области робототехники.
Модульная робототехника Google Group — открытый публичный форум, посвященный анонсам событий в области модульной робототехники. Эта среда используется для распространения звонков на семинары, специальные вопросы и другие академические мероприятия, представляющие интерес для исследователей модульной робототехники. Основатели этой группы Google намерены облегчить обмен информацией и идеями внутри сообщества исследователей модульной робототехники по всему миру и тем самым способствовать ускорению прогресса в области модульной робототехники. Любой, кого интересуют цели и прогресс модульной робототехники, может присоединиться к этой группе Google и узнать о новых разработках в этой области.
Веб-сайты, специально посвященные изучению этой технологии
[ редактировать ]- «Конверт гибкости» . Самостоятельная реконфигурация модульной робототехники и созданное будущее .
- «Самореконфигурируемая модульная технология» . Коллекция веб-сайтов, веб-страниц, видеоклипов, статей и документов .
См. также
[ редактировать ]- «Непобедимый» — научно-фантастический роман 1964 года, интрига которого сосредоточена на самонастраивающихся стаях наноботов.
- Сценарий серой слизи
- Самовоспроизводящаяся машина
- Бионика
- Бесплатная робототехника
- Морфогенетическая робототехника
- Программируемая материя
- Протез
- Коммунальный туман
Дальнейшее чтение
[ редактировать ]- «Самореконфигурируемые роботы. Введение» . Отличное введение в то, где SRCMR находится сегодня, как он туда попал и куда ему нужно идти в будущем . Архивировано из оригинала 5 августа 2011 года . Проверено 13 июля 2011 г.
- Мурата, Сатоши; Курокава, Харухиса (2012). Самоорганизующиеся роботы . Спрингер Тракты в продвинутой робототехнике. Том. 77. дои : 10.1007/978-4-431-54055-7 . ISBN 978-4-431-54054-0 .
{{cite book}}:|journal=игнорируется ( помогите )
Ссылки
[ редактировать ]- ^ П. Мубарак и др., Модульная и реконфигурируемая мобильная робототехника, Журнал робототехники и автономных систем , 60 (12) (2012) 1648–1663
- ^ Н. Бренер, Ф. Бен Амар и П. Бидо, « Характеристика решетчатых модульных роботов с помощью дискретных групп смещения », в IEEE / RSJ Int. Конф. «Интеллектуальные роботы и системы» (IROS) , Тапей, Тайвань, октябрь 2010 г.
- ^ Тан, Нин; Хаят, Абдулла Аамир; Элара, Мохан Раджеш; Вуд, Кристин Л. (2020). «Основы таксономии и оценки самореконфигурируемых роботизированных систем» . Доступ IEEE . 8 : 13969–13986. Бибкод : 2020IEEA...813969T . дои : 10.1109/ACCESS.2020.2965327 . ISSN 2169-3536 .
 В эту статью включен текст , доступный по лицензии CC BY 4.0 .
В эту статью включен текст , доступный по лицензии CC BY 4.0 . - ^ «Модульные реконфигурируемые роботы в космосе» (PDF) . Исследовательский центр Пало-Альто ( PARC ). 2004.
- ^ Университет Карнеги-Меллон. «Клейтроника – Университет Карнеги-Меллона» . www.cs.cmu.edu .
- ^ Фечко, Яцек; Манка, Михал; Крол, Павел; Гергель, Мариуш; Уль, Тадеуш; Петршик, Анджей (июль 2015 г.). «Обзор модульных самореконфигурируемых робототехнических систем». 2015 10-й Международный семинар по движению и управлению роботами (RoMoCo) . стр. 182–187. дои : 10.1109/RoMoCo.2015.7219733 . ISBN 978-1-4799-7043-8 . S2CID 34234072 .
- ^ Маккензи, Дана; Манка, Михал; Крол, Павел; Гергель, Мариуш; Уль, Тадеуш; Петшик, Анджей (8 августа 2003 г.). «Оборотни идут по сложному пути к реальности». Наука . 301 (5634): 754–756. дои : 10.1126/science.301.5634.754 . ПМИД 12907773 . S2CID 28194165 .
- ^ Программируемые материалы . Джозеф Майкл. Патент Великобритании GB2287045B выдан 14 мая 1997 г.
- ^ Фрактальные роботы. Архивировано из оригинала.
- ^ А. Брунете, М. Эрнандо и Э. Гамбао, « Модульная мультиконфигурируемая архитектура для микророботов для проверки труб малого диаметра », Материалы Международной конференции IEEE 2005 г. по робототехнике и автоматизации, 2005, стр. 490-495. два : 10.1109/ROBOT.2005.1570166
- ^ Леви, П.; Мейстер, Э.; ван Россум, AC; Крайник, Т.; Вонасек, В.; Степан, П.; Лю, В.; Каппаррелли, Ф. (31 марта 2014 г.). «Когнитивная архитектура для модульных и самореконфигурируемых роботов» (PDF) . Материалы Международной системной конференции IEEE 2014 . Системная конференция (SysCon), 8-я ежегодная конференция IEEE, 2014 г. стр. 465–472. дои : 10.1109/SysCon.2014.6819298 . ISBN 978-1-4799-2086-0 . S2CID 30709324 .
- ^ Рохан Таккер, Аджинкья Камат, Сачин Бхарамбе, Шитал Чиддарвар и К.М. Бхурчанди. « РеБиС — реконфигурируемый двуногий робот-змея ». В материалах Международной конференции IEEE/RSJ по интеллектуальным роботам и системам 2014 г., 2014 г.
- ^ Хаят, А.А.; Парвин, Р.; Элара, MR; Парсураман, К.; Кандасами, PS (май 2019 г.). «Пантера: конструкция реконфигурируемого подметального робота». 2019 Международная конференция по робототехнике и автоматизации (ICRA) . стр. 7346–7352. дои : 10.1109/ICRA.2019.8794268 . ISBN 978-1-5386-6027-0 . S2CID 199541251 .
- ^ Лилиан Чин; Макс Бернс; Грегори Се; Даниэла Рус. « Передвижение в стиле флиппера с помощью сильных расширяющихся модульных роботов » в письмах IEEE Robotics and Automation Letters (том: 8, выпуск: 2, страницы: 528–535, февраль 2023 г.)
- ^ "Дом" . Архивировано из оригинала 4 августа 2002 года . Проверено 6 ноября 2006 г.
- ^ «М-ТРАН(Модульный Трансформатор)МТРАН» . unit.aist.go.jp. Архивировано из оригинала 5 марта 2016 года.
- ^ Корнельской лаборатории творческих машин (CCSL) Стохастическая модульная робототехника .
- ^ Зыков Виктор; Митилинайос, Эфстафий; Адамс, Брайант; Липсон, Ход (2005). «Самовоспроизводящиеся машины». Природа . 435 (7039). ООО «Спрингер Сайенс энд Бизнес Медиа»: 163–164. дои : 10.1038/435163а . ISSN 0028-0836 . ПМИД 15889080 . S2CID 4362474 .
- ^ здесь
- ^ Роботы
- ^ лаборатории биоробототехники Веб-страница румботов
- ^ Самбот
- ^ Самосборные модульные роботы Swarm
- ^ Чунг, К.К., Демейн, Э.Д., Бахрач, Дж.Р. и Гриффит, С., « Программируемая сборка с универсально складными строками (мотейнами) », Транзакции IEEE в робототехнике, том. 27, нет. 4, стр. 718-729 (2011).
- ^ Симбрион
- ^ «Умный песок и робот-камешки» . Массачусетский технологический институт. 2 апреля 2012 г.
- ^ «DPRSim — симулятор динамического физического рендеринга» . Интел.
- ^ Винклер, Л.; Вонасек, В.; Изношенный, Х.; Преусил, Л., « Robot3D — симулятор мобильных модульных самореконфигурируемых роботов », Конференция IEEE по мультисенсорному слиянию и интеграции для интеллектуальных систем (MFI), стр. 464,469, 13–15 сентября 2012 г., doi: 10.1109/MFI.2012.6343016
- Модульные самореконфигурируемые робототехнические системы: вызовы и возможности будущего, авторы Йим, Шен, Салеми, Рус, Молл, Липсон, Клавинс и Чирикджян, опубликовано в журнале IEEE Robotics & Automation Magazine, март 2007 г. [5]
- Самореконфигурируемый робот: меняющие форму клеточные роботы могут превосходить по гибкости обычные роботы, автор Мурата и Курокава, опубликовано в журнале IEEE Robotics & Automation Magazine, март 2007 г. [6] [ постоянная мертвая ссылка ]
- Методика выбора центральной конфигурации для реконфигурируемого модульного робота. Авторы: Лю Дж.Г., Ван Ю.К. и др., опубликовано в журнале Science in China Series F: Information Sciences, 2007. [7]
- Самостоятельная реконфигурация модульной робототехники. Основы, научно-популярное введение в основы SRCMR и некоторые глубокие последствия, которые это будет иметь. Пер Сьёборг, 2009 г. [8]
Внешние ссылки
[ редактировать ]- «Робототехника свободной формы» . Группа исследований робототехники Freeform.
- «Лаборатория распределенной робототехники» . Лаборатория распределенной робототехники в Массачусетском технологическом институте .
- «Модульные роботы в PARC» . Модульные реконфигурируемые роботы . Архивировано из оригинала 20 февраля 2007 года . Проверено 3 февраля 2007 г.
- «ModLab в Пенсильванском университете» . Исследование модульной реконфигурируемой робототехники .
- «Проект Claytronics в Университете Карнеги-Меллона» . Совместные исследования в области программируемой материи .
- «Группа модульной робототехники Южного университета Дании» . Исследования в области модульной и самореконфигурируемой робототехники . Архивировано из оригинала 7 июля 2009 года . Проверено 17 июня 2009 г.
- «Лаборатория Фукуда» . Исследования в области модульной и самореконфигурируемой робототехники и микронаносистем .
- «Лаборатория биоробототехники» . Исследования в области модульной и самореконфигурируемой робототехники, биоробототехники, динамических систем (например, CPG), реабилитационной робототехники .
