Ромбический привод
Эта статья в значительной степени или полностью опирается на один источник . ( март 2019 г. ) |
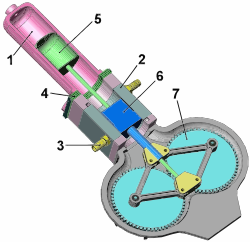
1 (розовый) — стенка горячего цилиндра, 2 (темно-серый) — стенка холодного цилиндра (с впускными и выпускными патрубками охлаждающей жидкости, обозначенными 3 желтым цветом), 4 (темно-зеленый) — теплоизоляция, разделяющая два конца цилиндра, 5 (светло-зеленый) - Поршень вытеснителя, 6 (темно-синий) - Приводной поршень, 7 (голубой) - Маховики,
Не показаны: внешний источник тепла и внешние радиаторы. В этой конструкции поршень-вытеснитель используется без регенератора.
Ромбический привод — это особый метод передачи механической энергии или работы , используемый, когда один цилиндр используется для двух отдельно колеблющихся поршней.
История
[ редактировать ]Первоначально он был разработан примерно в 1900 году для двухцилиндрового автомобильного двигателя Lanchester , где позволял идеально балансировать силы инерции на обоих поршнях. Текущий пример его использования - двигатели Стирлинга бета-типа ; сложность привода и жесткие допуски, вызывающие высокую стоимость производства, являются препятствием для широкого использования этого привода.
Операция
[ редактировать ]
В своей простейшей форме привод использует шарнирный ромбовидный элемент для преобразования линейной работы от возвратно-поступательного поршня во вращательную работу. Шатун поршня является жестким, в отличие от обычного поршневого двигателя, который напрямую соединяет поршень с коленчатым валом с помощью гибкого шарнира в поршне. Вместо этого стержень соединяется с одним углом ромба . Когда к поршню прилагается сила, он толкает вниз; при этом внешние углы ромба выталкиваются наружу. Они толкают два кривошипа/маховика, которые заставляют их вращаться каждый в противоположных направлениях. По мере вращения колес ромб меняет свою форму: от сплющенного в направлении оси поршня в верхней мертвой точке до сплющенного в направлении, перпендикулярном оси поршня в нижней мертвой точке .
В изображенном примере левый кривошип/маховик вращается по часовой стрелке, а правый кривошип/маховик — против часовой стрелки. Они вращаются с одинаковой угловой скоростью, и это можно усилить, введя их в зацепление как шестерни.
Ссылки
[ редактировать ]- Механические приводы двигателей Стирлинга Доктор Зигфрид «Зиг» Херцог, доцент кафедры машиностроения, Университет штата Пенсильвания в Монт-Альто. 01.06.05 По состоянию на август 2007 г.
См. также
[ редактировать ]