Автономный самолет
Эту статью необходимо обновить . ( февраль 2022 г. ) |
Автономный летательный аппарат — это летательный аппарат , который летает под управлением бортовых автономных роботизированных систем и не требует вмешательства пилота- человека или дистанционного управления . Большинство современных автономных летательных аппаратов представляют собой беспилотные летательные аппараты (дроны) с заранее запрограммированными алгоритмами для выполнения определенных задач, но достижения в технологиях искусственного интеллекта (например, машинное обучение ) означают, что автономные системы управления достигают точки, когда несколько воздушных такси и связанные с ними режимы регулирования становятся неэффективными. разрабатывается.
История
[ редактировать ]Беспилотные летательные аппараты
[ редактировать ]
Самое раннее зарегистрированное использование беспилотного летательного аппарата в боевых действиях произошло в июле 1849 года. [ 1 ] служил авианосцем ( предшественник авианосца ) [ 2 ] Значительное развитие радиоуправляемых дронов началось в начале 1900-х годов и первоначально было сосредоточено на предоставлении учебных мишеней для обучения военнослужащих. Самой ранней попыткой создания БПЛА с двигателем была AM Low в 1916 году. «Воздушная мишень» [ 3 ]
Автономные функции, такие как автопилот и автоматизированная навигация, постепенно развивались на протяжении двадцатого века, хотя такие методы, как сопоставление контуров местности (TERCOM), применялись в основном к крылатым ракетам .
Некоторые современные дроны обладают высокой степенью автономности, хотя они не полностью работоспособны, а нормативно-правовая база запрещает их широкое использование в гражданской авиации. Однако были предприняты некоторые ограниченные испытания.
Пассажиры
[ редактировать ]Поскольку полетные, навигационные и коммуникационные системы стали более совершенными, безопасная перевозка пассажиров стала практической возможностью. Системы автопилота освобождают пилота-человека от все большего количества обязанностей, но пилот в настоящее время по-прежнему необходим.
В настоящее время разрабатывается ряд воздушных такси , а также планируются более крупные автономные транспортные средства. Персональный летательный аппарат — это еще один класс, в котором от одного до четырех пассажиров не могут управлять самолетом, а автономность считается необходимой для широкого внедрения.
Архитектура системы управления
[ редактировать ]Вычислительные возможности авиационных пилотажных и навигационных систем следовали за развитием вычислительных технологий, начиная с аналогового управления и заканчивая микроконтроллерами, затем системами на кристалле (SOC) и одноплатными компьютерами (SBC).
Датчики
[ редактировать ]Датчики положения и движения дают информацию о состоянии самолета. Экстероцептивные сенсоры обрабатывают внешнюю информацию, например измерения расстояний, а экспроприоцептивные коррелируют внутренние и внешние состояния. [ 4 ]
Некооперативные датчики способны обнаруживать цели автономно, поэтому они используются для обеспечения разделения и предотвращения столкновений. [ 5 ]
Степени свободы (DOF) относятся как к количеству, так и к качеству датчиков на борту: 6 DOF подразумевают 3-осевые гироскопы и акселерометры (типичный инерциальный измерительный блок – IMU), 9 DOF относятся к IMU плюс компас, 10 DOF добавляют барометр и 11 степеней свободы обычно добавляют GPS-приемник. [ 6 ]
Приводы
[ редактировать ]БПЛА Приводы включают цифровые электронные регуляторы скорости (которые контролируют частоту вращения двигателей), связанные с двигателями/ пропеллерами , серводвигатели ( в основном для самолетов и вертолетов), вооружение, приводы полезной нагрузки, светодиоды и динамики.
Программное обеспечение
[ редактировать ]Программное обеспечение БПЛА, называемое полетным стеком или автопилотом. Целью полетного стека является получение данных от датчиков, двигателей управления для обеспечения устойчивости БПЛА и облегчения связи с наземным управлением и планированием миссии. [ 7 ]
БПЛА — это системы реального времени , требующие быстрого реагирования на изменение данных датчиков. В результате БПЛА для своих вычислительных нужд полагаются на одноплатные компьютеры. Примеры таких одноплатных компьютеров включают Raspberry Pis , Beagleboards и т. д., экранированные с помощью NavIO , PXFMini и т. д. или разработанные с нуля, такие как NuttX , preemptive -RT Linux , Xenomai , Orocos-Robot Operating System или DDS-ROS 2.0 .
| Слой | Требование | Операции | Пример |
|---|---|---|---|
| Прошивка | критичный ко времени | От машинного кода до выполнения процессора и доступа к памяти | Ардукоптер-v1, PX4 |
| Промежуточное ПО | критичный ко времени | Управление полетом, навигация, радиоуправление | PX4, Cleanflight, ArduPilot |
| Операционная система | Компьютероемкий | Оптический поток, объезд препятствий, SLAM, принятие решений | ROS, Nuttx, дистрибутивы Linux, Microsoft IOT |
Стеки с открытым исходным кодом гражданского использования включают:
- Ардукоптер
- CrazyFlie
- ККМультикоптер
- МультиВии
- BaseFlight (разветвление MultiWii)
- CleanFlight (разветвленный от BaseFlight)
- BetaFlight (разветвление CleanFlight)
- iNav (разветвленный от CleanFlight)
- RaceFlight (разветвленный от CleanFlight)
- CleanFlight (разветвленный от BaseFlight)
- BaseFlight (разветвление MultiWii)
- OpenPilot
- dRonin (разветвленный от OpenPilot)
- LibrePilot (ответвление OpenPilot)
- TauLabs (разветвление OpenPilot)
- Папарацци
- автопилот PX4
- DroneCode (зонтичная организация, управляющая PX4 в рамках Linux Foundation )
Поскольку программное обеспечение БПЛА имеет открытый исходный код, его можно настроить для конкретных приложений. Например, исследователи из Технического университета Кошице заменили стандартный алгоритм управления автопилотом PX4. [ 8 ] Эта гибкость и совместные усилия привели к появлению большого количества различных стеков с открытым исходным кодом, некоторые из которых являются ответвлениями других, например CleanFlight, который является ответвлением от BaseFlight и от которого произошли три других стека.
Принципы цикла
[ редактировать ]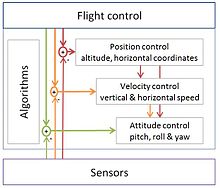
БПЛА используют разомкнутую, замкнутую или гибридную архитектуру управления.
- Разомкнутый контур . Этот тип обеспечивает сигнал положительного управления (быстрее, медленнее, влево, вправо, вверх, вниз) без учета обратной связи на основе данных датчика.
- Замкнутый контур . Этот тип включает обратную связь от датчиков для корректировки поведения (уменьшите скорость, чтобы отразить попутный ветер, поднимитесь на высоту 300 футов). ПИД -регулятор обычный. Иногда используется упреждающая связь , устраняющая необходимость дальнейшего замыкания контура. [ 9 ]
Коммуникации
[ редактировать ]Большинство БПЛА используют радиостанцию для дистанционного управления и обмена видео и другими данными . Ранние БПЛА имели только узкополосную линию связи. Даунлинки появились позже. Эти двунаправленные узкополосные радиоканалы передавали удаленному оператору данные управления и телеметрии о состоянии систем самолета. Для полетов на очень большие расстояния военные БПЛА также используют спутниковые приемники как часть спутниковых навигационных систем. В тех случаях, когда требовалась передача видео, на БПЛА будет реализована отдельная аналоговая видеорадиолиния.
В большинстве современных автономных приложений требуется передача видео. канал Широкополосный используется для передачи всех типов данных по одному радиоканалу. Эти широкополосные каналы могут использовать методы обеспечения качества обслуживания для оптимизации трафика C&C для снижения задержек. Обычно эти широкополосные каналы передают трафик TCP/IP , который можно маршрутизировать через Интернет.
Связь может быть установлена с помощью:
- Наземный контроль – военная наземная станция управления (НСУ) . Протокол MAVLink становится все более популярным для передачи данных управления и контроля между наземным центром управления и транспортным средством.
- Удаленная сетевая система, такая как спутниковые дуплексные каналы передачи данных для некоторых военных держав . [ 10 ] Цифровое видео, передаваемое по мобильным сетям, также вышло на потребительские рынки. [ 11 ] в то время как прямой канал управления БПЛА через сотовую сеть и LTE был продемонстрирован и находится в стадии испытаний. [ 12 ]
- Еще один самолет, выполняющий функции ретрансляционного или мобильного пункта управления – военный пилотируемо-беспилотный связной (МУМ-Т). [ 13 ]
Поскольку с годами производительность и надежность мобильных сетей возросли, дроны начали использовать мобильные сети для связи. Мобильные сети можно использовать для отслеживания дронов, дистанционного пилотирования, обновлений по беспроводной сети. [ 14 ] и облачные вычисления. [ 15 ]
Современные сетевые стандарты явно учитывают автономные летательные аппараты и поэтому включают в себя оптимизацию. Стандарт 5G требует сокращения задержки пользовательской плоскости до 1 мс при использовании сверхнадежной связи с малой задержкой. [ 16 ]
Автономия
[ редактировать ]Этот раздел нуждается в дополнительных цитатах для проверки . ( Май 2016 г. ) |

Базовая автономия обеспечивается проприоцептивными сенсорами. Расширенная автономность требует ситуационной осведомленности и знаний об окружающей среде, окружающей самолет, с помощью экстероцептивных датчиков: объединение датчиков объединяет информацию от нескольких датчиков. [ 4 ]
Основные принципы
[ редактировать ]Одним из способов достижения автономного управления является использование нескольких уровней контура управления, как в иерархических системах управления . По состоянию на 2016 год циклы нижнего уровня (т. е. для управления полетом) тикают со скоростью 32 000 раз в секунду, тогда как контуры более высокого уровня могут выполнять цикл один раз в секунду. Принцип состоит в том, чтобы разложить поведение самолета на управляемые «куски» или состояния с известными переходами. Типы иерархических систем управления варьируются от простых сценариев до конечных автоматов , деревьев поведения и иерархических планировщиков задач . Наиболее распространенным механизмом управления, используемым на этих уровнях, является ПИД-регулятор , который можно использовать для достижения зависания квадрокоптера , используя данные от IMU для расчета точных входных данных для электронных регуляторов скорости и двигателей. [ нужна ссылка ]
Примеры алгоритмов среднего уровня:
- Планирование пути: определение оптимального пути для транспортного средства при соблюдении целей миссии и ограничений, таких как препятствия или потребности в топливе.
- Генерация траектории ( планирование движения ): определение маневров управления, которые необходимо предпринять, чтобы следовать по заданному пути или перейти из одного места в другое. [ 17 ] [ 18 ]
- Регулирование траектории: ограничение транспортного средства в пределах некоторого допуска к траектории.
Усовершенствованные иерархические планировщики задач БПЛА используют такие методы, как поиск по дереву состояний или генетические алгоритмы . [ 19 ]
Особенности автономности
[ редактировать ]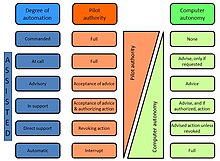
Производители БПЛА часто реализуют определенные автономные операции, такие как:
- Самовыравнивание: стабилизация положения по осям тангажа и крена.
- Удержание высоты: дрон поддерживает свою высоту, используя барометрическое давление и/или данные GPS.
- Наведение/удержание положения: сохраняйте ровный угол наклона и крена, стабильный курс рыскания и высоту, сохраняя при этом положение с помощью GNSS или инерциальных датчиков.
- Безголовый режим: управление тангажем относительно положения пилота, а не относительно осей автомобиля.
- Беззаботность: автоматический контроль крена и рыскания при горизонтальном движении
- Взлет и посадка (с использованием различных авиационных или наземных датчиков и систем; см. также: Autoland )
- Отказоустойчивость: автоматическая посадка или возврат домой при потере сигнала управления.
- Возвращение домой: летите обратно к точке взлета (часто сначала набирая высоту, чтобы избежать возможных препятствий, таких как деревья или здания).
- Следуй за мной: сохраняйте относительное положение относительно движущегося пилота или другого объекта с помощью GNSS, распознавания изображений или маяка самонаведения.
- Навигация по путевым точкам GPS: использование GNSS для навигации к промежуточному местоположению на маршруте движения.
- Вращение вокруг объекта: похоже на «Следуй за мной», но постоянно кружит вокруг цели.
- Предварительно запрограммированные фигуры высшего пилотажа (например, бочки и петли).
Функции
[ редактировать ]Полная автономия доступна для решения конкретных задач, таких как дозаправка в воздухе. [ 20 ] или наземное переключение аккумуляторов; но задачи более высокого уровня требуют более высоких вычислительных, сенсорных и исполнительных возможностей. Один из подходов к количественной оценке автономных возможностей основан на терминологии OODA , предложенной исследовательской лабораторией ВВС США в 2002 году и использованной в таблице ниже: [ 21 ]
| Уровень | Дескриптор уровня | Наблюдать | Восток | Решать | Действовать |
|---|---|---|---|---|---|
| Восприятие/ситуационная осведомленность | Анализ/Координация | Принятие решений | Возможность | ||
| 10 | Полностью автономный | Знающий обо всем в пространстве боя | Координаты при необходимости | Способен на полную независимость | Требуется небольшое руководство для выполнения работы |
| 9 | Знание роя в пространстве боя | Вывод о пространстве боя – намерение себя и других (союзников и врагов).
Сложная/напряженная среда – встроенное отслеживание |
Поставленные цели стратегической группы
Предполагаемая стратегия противника |
Распределенное тактическое групповое планирование
Индивидуальное определение тактической цели Индивидуальное планирование/выполнение задач Выбирайте тактические цели |
Групповое достижение стратегической цели без надзорной помощи |
| 8 | Знание боевого пространства | Вывод о близости – намерение себя и других (союзников и врагов)
Уменьшает зависимость от внешних данных |
Поставленные цели стратегической группы
Предполагаемая тактика противника ATR |
Скоординированное планирование тактической группы
Индивидуальное планирование/выполнение задач Выберите цель возможностей |
Групповое достижение стратегической цели с минимальной супервизионной помощью
(пример: пойти на охоту за СКАДом) |
| 7 | Знания о боевом пространстве | Осведомленность о коротком пути – история и прогнозируемое поле боя
Данные в ограниченном диапазоне, сроках и количествах Ограниченный вывод, дополненный внешними данными |
Поставлены цели тактической группы
Предполагаемая траектория противника |
Индивидуальное планирование/выполнение задач для достижения целей | Групповое решение тактических задач с минимальной руководящей помощью. |
| 6 | Реальное время
Сотрудничество нескольких транспортных средств |
Осведомленность на дальнем расстоянии – бортовое зондирование на большом расстоянии,
дополнено внешними данными |
Поставлены цели тактической группы
Траектория противника обнаружена/оценена |
Скоординированное планирование и выполнение траектории для достижения целей – групповая оптимизация | Групповое решение тактических задач с минимальной руководящей помощью.
Возможно: близкое разделение воздушного пространства (+/-100 ярдов) для AAR, формирование в безопасных условиях. |
| 5 | Реальное время
Координация нескольких транспортных средств |
Чувствительная осведомленность – локальные датчики для обнаружения других,
Совмещено с внешними данными |
Назначен план тактической группы
Диагностика работоспособности RT Возможность компенсировать большинство отказов и условий полета; Способность прогнозировать возникновение сбоев (например, Prognostic Health Mgmt) Групповая диагностика и управление ресурсами |
Встроенное перепланирование траектории – оптимизируется с учетом текущих и прогнозируемых условий.
Предотвращение столкновений |
Самостоятельное выполнение тактического плана по внешнему заданию
Разделение воздушного пространства среднего транспортного средства (сотни ярдов) |
| 4 | Адаптивная неисправность/событие
Транспортное средство |
Преднамеренная осведомленность – союзники передают данные | Назначен план тактической группы
Установленные правила взаимодействия RT Диагностика здоровья; Способность компенсировать большинство отказов и условий полета – изменения внутреннего контура отражаются на характеристиках внешнего контура. |
Перепланирование траектории на борту – в зависимости от событий
Самостоятельное управление ресурсами Деконфликт |
Самостоятельное выполнение тактического плана по внешнему заданию
Разделение воздушного пространства среднего транспортного средства (сотни ярдов) |
| 3 | Надежное реагирование на неисправности/события в реальном времени | История и модели здоровья/статуса | Назначен план тактической группы
Диагностика здоровья RT (Каковы масштабы проблем?) Способность компенсировать большинство отказов и условий полета (т.е. адаптивное управление по внутреннему контуру) |
Оцените статус и требуемые возможности миссии
Прерывание/RTB недостаточно |
Самостоятельное выполнение тактического плана по внешнему заданию |
| 2 | Изменяемая миссия | Датчики здоровья/статуса | RT Диагностика здоровья (Есть ли у меня проблемы?)
Внеплановая перепланировка (по необходимости) |
Выполнение заранее запрограммированных или загруженных планов
в зависимости от миссии и состояния здоровья |
Самостоятельное выполнение тактического плана по внешнему заданию |
| 1 | Выполнить заранее запланированное
Миссия |
Предварительно загруженные данные миссии
Управление полетом и навигационное зондирование |
До/после полета BIT
Статус отчета |
Запрограммированные планы миссии и прерывания | Требования к широкому разделению воздушного пространства (мили) |
| 0 | Удаленно
Пилотируемый Транспортное средство |
Датчики управления полетом (отношение, скорость)
Носовая камера |
Телеметрические данные
Команды дистанционного пилота |
Н/Д | Управление дистанционным пилотом |
Средние уровни автономии, такие как реактивная автономия и высокие уровни с использованием когнитивной автономии, уже в некоторой степени достигнуты и являются очень активной областью исследований.
Реактивная автономия
[ редактировать ]Реактивная автономия, такая как коллективный полет, предотвращение столкновений в реальном времени , следование за стеной и центрирование коридора, опирается на телекоммуникации и ситуационную осведомленность, обеспечиваемую датчиками дальности: оптический поток , [ 22 ] лидары (световые радары), радары , гидролокаторы .
Большинство датчиков дальности анализируют электромагнитное излучение, отраженное от окружающей среды и попадающее на датчик. Камеры (для визуального потока) действуют как простые приемники. Лидары, радары и гидролокаторы (со звуковыми механическими волнами) излучают и принимают волны, измеряя время прохождения туда и обратно. Камеры БПЛА не требуют излучаемой энергии, что снижает общее потребление.
Радары и гидролокаторы в основном используются в военных целях.
Реактивная автономия в некоторых формах уже достигла потребительских рынков: она может стать широко доступной менее чем через десять лет. [ 4 ]

Одновременная локализация и картографирование
[ редактировать ]SLAM объединяет одометрию и внешние данные для представления мира и положения БПЛА в нем в трех измерениях. Высотная наружная навигация не требует больших вертикальных полей обзора и может полагаться на координаты GPS (что делает ее простым картографированием, а не SLAM). [ 23 ]
Двумя смежными областями исследований являются фотограмметрия и лидар, особенно на малых высотах и в 3D-средах внутри помещений.
- Фотограмметрический и стереофотограмметрический SLAM в помещении был продемонстрирован с использованием квадрокоптеров. [ 24 ]
- Лидарные платформы с тяжелыми, дорогостоящими и карданными традиционными лазерными платформами хорошо себя зарекомендовали. В исследованиях предпринимаются попытки учесть стоимость производства, расширение 2D-3D, соотношение мощности и дальности действия, вес и размеры. [ 25 ] [ 26 ] Приложения для определения дальности светодиодов коммерциализируются для обеспечения возможности обнаружения на малых расстояниях. Исследования изучают гибридизацию между излучением света и вычислительной мощностью: с фазированной решеткой пространственные модуляторы света , [ 27 ] [ 28 ] и с частотно-модулированной непрерывной волной (FMCW) МЭМС - перестраиваемые лазеры поверхностного излучения с вертикальным резонатором (VCSEL). [ 29 ]
Роение
[ редактировать ]Роение роботов относится к сетям агентов, способных динамически реконфигурироваться, когда элементы покидают сеть или входят в нее. Они обеспечивают большую гибкость, чем многоагентное сотрудничество. Роение может открыть путь к объединению данных. Некоторые летающие стаи, созданные на основе биотехнологий, используют рулевое управление и стайку. [ нужны разъяснения ]
Будущий военный потенциал
[ редактировать ]Этот раздел необходимо обновить . ( февраль 2022 г. ) |
В военном секторе американские «Хищники» и «Риперы» созданы для контртеррористических операций и в зонах боевых действий, в которых у противника недостаточно огневой мощи, чтобы сбить их. Они не предназначены для противодействия средствам ПВО или воздушному бою . В сентябре 2013 года глава Боевого командования ВВС США заявил, что нынешние БПЛА «бесполезны в условиях боевых действий», если для их защиты не будет самолетов с экипажем. (CRS) за 2012 год В отчете Исследовательской службы Конгресса США высказывалось предположение, что в будущем БПЛА смогут выполнять задачи, выходящие за рамки разведки, наблюдения, рекогносцировки и нанесения ударов; В отчете CRS в качестве возможных будущих мероприятий перечислены боевые действия воздух-воздух («более сложная задача будущего»). Дорожная карта интегрированных беспилотных систем Министерства обороны на 2013-2038 финансовый год предусматривает более важное место БПЛА в боевых действиях. Проблемы включают расширенные возможности, взаимодействие человека и БПЛА, управление возросшим потоком информации, повышение автономности и разработку боеприпасов для БПЛА. DARPA , Проект систем систем [ 30 ] или работы General Atomics могут предвещать будущие сценарии военных действий, причем последний раскрывает стаи Avenger, оснащенные системой зональной обороны с высокоэнергетическим жидким лазером (HELLADS). [ 31 ]
Когнитивное радио
[ редактировать ]Когнитивное радио [ нужны разъяснения ] Технология может иметь применение БПЛА. [ 32 ]
Возможности обучения
[ редактировать ]БПЛА могут использовать распределенные нейронные сети . [ 4 ]

См. также
[ редактировать ]- Международный конкурс воздушной робототехники
- Проект «Спутниковый страж»
- Тактическая система управления
- Ксвинг (авиация)
Ссылки
[ редактировать ]- ^ Будущее использования дронов: возможности и угрозы с этической и юридической точек зрения , Asser Press – Springer, глава Алана Маккенны, стр. 355
- ^ Каплан, Филип (2013). Морская авиация во Второй мировой войне . Перо и меч. п. 19. ISBN 978-1-4738-2997-8 .
- ^ Тейлор, Джон WR. Карманный справочник Джейн по дистанционно пилотируемым транспортным средствам .
- ^ Jump up to: а б с д Флореано, Дарио; Вуд, Роберт Дж. (27 мая 2015 г.). «Наука, технологии и будущее малых автономных дронов» . Природа . 521 (7553): 460–466. Бибкод : 2015Natur.521..460F . дои : 10.1038/nature14542 . ПМИД 26017445 . S2CID 4463263 .
- ^ Фазано, Джанкармине; Аккардо, Доменико; Тирри, Анна Елена; Мочча, Антонио; Де Леллис, Этторе (1 октября 2015 г.). «Объединение радиолокационных и электрооптических данных для некооперативного обнаружения и предотвращения БПЛА» . Аэрокосмическая наука и технология . 46 : 436–450. Бибкод : 2015AeST...46..436F . дои : 10.1016/j.ast.2015.08.010 .
- ^ «Игровая площадка Arduino — WhatIsDegreesOfFreedom6DOF9DOF10DOF11DOF» . игровая площадка.arduino.cc . Проверено 4 февраля 2016 г.
- ^ Карлсон, Дэниел Ф.; Рюсгаард, Сёрен (1 января 2018 г.). «Адаптация автопилотов дронов с открытым исходным кодом для наблюдения за айсбергами в реальном времени» . МетодыX . 5 : 1059–1072. дои : 10.1016/j.mex.2018.09.003 . ISSN 2215-0161 . ПМК 6139390 . ПМИД 30225206 .
- ^ Леско, Дж.; Шрайнер, М.; Мегеси, Д.; Ковач, Левенте (ноябрь 2019 г.). «Автопилот Pixhawk PX-4 управляет небольшим беспилотным самолетом» . 2019 Современные технологии безопасности на транспорте (МОСАТТ) . Кошице, Словакия: IEEE. стр. 90–93. дои : 10.1109/MOSATT48908.2019.8944101 . ISBN 978-1-7281-5083-3 . S2CID 209695691 .
- ^ Бристо, Каллу, Висьер, Пети (2011). «Технология навигации и управления внутри микроБПЛА AR.Drone» (PDF) . Всемирный конгресс МФБ .
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Барнард, Джозеф (2007). «Проблемы командования, управления и связи малыми БПЛА» (PDF) . Барнард Микросистемс .
- ^ «Дешевая камера для дрона, которая передает информацию на ваш телефон» . Bloomberg.com . Проверено 3 февраля 2016 г.
- ^ «Сотовая связь обеспечивает более безопасное развертывание дронов» . Квалкомм . Проверено 9 мая 2018 г.
- ^ «Определение критически важных навыков взаимодействия пилотируемых и беспилотных летательных аппаратов для операторов беспилотных авиационных систем» (PDF) . Научно-исследовательский институт поведенческих и социальных наук армии США . Сентябрь 2012 г. Архивировано (PDF) из оригинала 6 февраля 2016 г.
- ^ Заявка США 20170127245 , Адкинс, Тимоти М., «Связь с дронами 4G», опубликованная 4 мая 2017 г. , сейчас заброшена.
- ^ Шарма, Навудай; Магарини, Маурицио; Джаякоди, Душанта Налин К.; Шарма, Вишал; Ли, Цзюнь (август 2018 г.). «Сверхплотные облачные сети дронов по требованию: возможности, проблемы и преимущества». Журнал коммуникаций IEEE . 56 (8): 85–91. дои : 10.1109/MCOM.2018.1701001 . hdl : 11311/1063273 . ISSN 1558-1896 . S2CID 52019723 .
- ^ «Минимальные требования, связанные с техническими характеристиками радиоинтерфейса(ов) IMT-2020» . www.itu.int . Проверено 8 октября 2020 г.
- ^ Роберж, В.; Тарбучи, М.; Лабонте, Г. (1 февраля 2013 г.). «Сравнение параллельного генетического алгоритма и оптимизации роя частиц для планирования траектории БПЛА в реальном времени». Транзакции IEEE по промышленной информатике . 9 (1): 132–141. дои : 10.1109/TII.2012.2198665 . ISSN 1551-3203 . S2CID 8418538 .
- ^ Тисдейл, Дж.; Ким, ЗуВан; Хедрик, Дж. К. (1 июня 2009 г.). «Планирование и оценка пути автономного БПЛА». Журнал IEEE Robotics Automation . 16 (2): 35–42. дои : 10.1109/MRA.2009.932529 . ISSN 1070-9932 . S2CID 9696725 .
- ^ Чекмез, Озсигинан, Айдын и Сахингоз (2014). «Планирование пути БПЛА с использованием параллельных генетических алгоритмов на архитектуре CUDA» (PDF) . Всемирный конгресс по технике .
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Давенпорт, Кристиан (23 апреля 2015 г.). «Посмотрите один шаг в истории ВМФ: автономный дрон дозаправляется в воздухе» . Вашингтон Пост . ISSN 0190-8286 . Проверено 3 февраля 2016 г.
- ^ Клаф, Брюс (август 2002 г.). «Метрики, шметрики! Как, черт возьми, вы вообще определяете автономность БПЛА?» (PDF) . Исследовательская лаборатория ВВС США . Архивировано (PDF) из оригинала 6 февраля 2016 года.
- ^ Серрес, Жюльен Р.; Массон, Гийом П.; Руффье, Франк; Франческини, Николя (2008). «Пчела в коридоре: центрирование и следование за стеной» (PDF) . Naturwissenschaften . 95 (12): 1181–1187. Бибкод : 2008NW.....95.1181S . дои : 10.1007/s00114-008-0440-6 . ПМИД 18813898 . S2CID 226081 .
- ^ Рока, Мартинес-Санчес, Лагуэла и Ариас (2016). «Новая система воздушного 3D-картографирования на основе платформ БПЛА и 2D-лазерных сканеров» . Журнал датчиков . 2016 : 1–8. дои : 10.1155/2016/4158370 .
{{cite journal}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ «ETH Zurich: Дроны с чувством направления» . Асцендинг Технолоджис ГмбХ . 10 ноября 2015 года . Проверено 3 февраля 2016 г.
- ^ Тимоти Б. Ли (1 января 2018 г.). «Почему эксперты считают, что более дешевый и лучший лидар уже не за горами» – через Ars Technica.
- ^ Шаоцзе Шен (16 ноября 2010 г.), Автономная воздушная навигация в закрытых помещениях , получено 3 февраля 2016 г.
- ^ «SWEEPER демонстрирует технологию широкоугольной оптической фазированной решетки» . www.darpa.mil . Проверено 3 февраля 2016 г.
- ^ «ЛИДАР: ЛИДАР приближается к повсеместному распространению по мере распространения миниатюрных систем» . www.laserfocusworld.com . 13 октября 2015 г. Проверено 3 февраля 2016 г.
- ^ Шарлатан, Феррара, Гамбини, Хан, Керали, Цяо, Рао, Сэндборн, Чжу, Чуан, Яблонович, Бозер, Чанг-Хаснайн, К. Ву (2015). «Разработка исходного чипа FMCW LADAR с использованием MEMS-электронно-фотонной гетерогенной интеграции» . Калифорнийский университет в Беркли .
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ «План DARPA по сокрушению врагов с помощью роящихся дронов – Drone 360» . Дрон 360 . 6 апреля 2015 года . Проверено 3 февраля 2016 г.
- ^ NewWorldofWeapons (17 января 2014 г.), БПЛА-СТЕЛС ВВС США, вооруженный ЛАЗЕРНОЙ ПУШКОЙ под названием General Atomics Avenger , получен 3 февраля 2016 г.
- ^ Янг (декабрь 2012 г.). «Единое многодоменное принятие решений: когнитивное радио и конвергенция автономных транспортных средств» . Факультет Политехнического института и Государственного университета Вирджинии . hdl : 10919/19295 . Проверено 18 сентября 2020 г.