Линейное подпространство
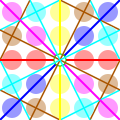 |
| Одномерные подпространства в двумерном векторном пространстве над конечным полем F 5 . Начало координат (0, 0), отмеченное зелеными кружками, принадлежит любому из шести 1-подпространств, тогда как каждая из 24 оставшихся точек принадлежит ровно одному; свойство, которое справедливо для 1-подпространств над любым полем и во всех измерениях . Все Ф 5 2 (т.е. квадрат 5×5) изображен четыре раза для лучшей визуализации |
В математике , а точнее в линейной алгебре , линейное подпространство или векторное подпространство. [1] [примечание 1] — векторное пространство , которое является подмножеством некоторого большего векторного пространства. Линейное подпространство обычно называют просто подпространством , если контекст позволяет отличить его от других типов подпространств.
Определение [ править ]
Если V — векторное пространство над полем K и если W подмножество V , то — линейное подпространство V K. если при операциях V , W является векторным пространством над — W Эквивалентно, непустое подмножество W является линейным подпространством V , если всякий раз, когда w 1 , w 2 являются элементами W и α , β являются элементами K , из этого следует, что αw 1 + βw 2 находится в W . [2] [3] [4] [5] [6]
Как следствие, все векторные пространства оснащены как минимум двумя (возможно, разными) линейными подпространствами: нулевым векторным пространством, состоящим только из нулевого вектора , и самим векторным пространством. Они называются тривиальными подпространствами векторного пространства. [7]
Примеры [ править ]
Пример I [ править ]
В векторном пространстве V = R 3 ( действительное координатное пространство над полем R действительных чисел ), возьмем W за множество всех векторов из V, последний компонент которых равен 0.Тогда W — подпространство V .
Доказательство:
- Учитывая u и v в W , они могут быть выражены как u = ( u 1 , u 2 , 0) и v = ( v 1 , v 2 , 0) . Тогда ты + v знак равно ( ты 1 + v 1 , ты 2 + v 2 , 0+0) = ( ты 1 + v 1 , ты 2 + v 2 , 0) . Таким образом, u + v тоже является элементом W .
- Учитывая u в W и скаляр c в R , если u = ( u 1 , u 2 , 0) снова, то c u = ( cu 1 , cu 2 , c 0) = ( cu 1 , cu 2 ,0) . Таким образом, c u является элементом W. тоже
Пример II [ править ]
Пусть поле снова будет R , но теперь пусть векторное пространство V будет декартовой плоскостью R. 2 .Возьмем W как набор точек ( x , y ) R 2 такой, что х = у .Тогда W — подпространство в R 2 .

Доказательство:
- Пусть p = ( p 1 , p 2 ) и q = ( q 1 , q 2 ) — элементы W , то есть точки на плоскости такие, что p 1 = p 2 и q 1 = q 2 . Тогда p + q = ( p 1 + q 1 , p 2 + q 2 ) ; поскольку p 1 = p 2 и q 1 = q 2 , то 1 + q 1 = p 2 + q 2 , поэтому p + q является элементом W. p
- Пусть p = ( p 1 , p 2 ) будет элементом W , то есть точкой на плоскости такой, что p 1 = p 2 , и пусть c будет скаляром в R . Тогда c p = ( cp 1 , cp 2 ) ; поскольку p 1 = p 2 , то cp 1 = cp 2 , поэтому c p является элементом W .
В общем случае любое подмножество реального координатного пространства R н определяемое однородной системой линейных уравнений, даст подпространство.(Уравнение в примере I было z = 0, а уравнение в примере II — x = y .)
Пример III [ править ]
Снова возьмем поле как R , но теперь пусть векторное пространство V будет множеством R Р всех функций от R до R. Пусть C( R ) — подмножество, состоящее из непрерывных функций .Тогда C( R ) является подпространством R Р .
Доказательство:
- Из математического анализа мы знаем, что 0 ∈ C( R ) ⊂ R Р .
- Из исчисления мы знаем, что сумма непрерывных функций непрерывна.
- Опять же, из исчисления мы знаем, что произведение непрерывной функции и числа непрерывно.
Пример IV [ править ]
Сохраните то же поле и векторное пространство, что и раньше, но теперь рассмотрим множество Diff( R ) всех дифференцируемых функций .Те же рассуждения, что и предыдущие, показывают, что это тоже подпространство.
Примеры, расширяющие эти темы, часто встречаются в функциональном анализе .
Свойства подпространств [ править ]
Из определения векторных пространств следует, что подпространства непусты и замкнуты относительно сумм и скалярных кратных. [8] Эквивалентно, подпространства можно охарактеризовать свойством замкнутости относительно линейных комбинаций. То есть непустое множество W является подпространством тогда и только тогда, когда каждая линейная комбинация конечного числа элементов W также принадлежит W .Эквивалентное определение гласит, что эквивалентно рассматривать линейные комбинации двух элементов одновременно.
В топологическом векторном пространстве X подпространство W не обязательно должно быть топологически замкнутым , но конечномерное подпространство всегда замкнуто. [9] То же самое верно и для подпространств конечной коразмерности (т. е. подпространств, определяемых конечным числом непрерывных линейных функционалов ).
Описания [ править ]
Описания подпространств включают набор решений однородной системы линейных уравнений , подмножество евклидова пространства, описываемое системой однородных линейных параметрических уравнений , диапазон набора векторов, а также нулевое пространство , пространство столбцов и пространство строк . матрица . Геометрически (особенно над полем действительных чисел и его подполями) подпространство — это плоскость в n - пространстве, проходящая через начало координат.
Естественным описанием 1-подпространства является скалярное умножение одного ненулевого вектора v на все возможные скалярные значения. 1-подпространства, заданные двумя векторами, равны тогда и только тогда, когда один вектор можно получить из другого скалярным умножением:

Эта идея обобщается для более высоких размерностей с линейным размахом , но критерии равенства k -пространств , заданных наборами из k векторов, не так просты.
Двойственное . описание обеспечивается линейными функционалами (обычно реализуемыми в виде линейных уравнений) Один ненулевой линейный функционал F задает своим ядерным подпространством F = 0 коразмерности 1. Подпространства коразмерности 1, заданные двумя линейными функционалами, равны тогда и только тогда, когда один функционал может быть получен из другого скалярным умножением (в двойственном пространстве ) :

Оно обобщается на высшие коразмерности с помощью системы уравнений . В следующих двух подразделах это последнее описание будет представлено подробно, а оставшиеся четыре подраздела дополнительно описывают идею линейного размаха.
Системы линейных уравнений [ править ]
Множество решений любой однородной системы линейных уравнений с n переменными представляет собой подпространство в координатном пространстве K н :
![{\displaystyle \left\{\left[\!\!{\begin{array}{c}x_{1}\\x_{2}\\\vdots \\x_{n}\end{array}}\ !\!\right]\in K^{n}:{\begin{alignedat}{6}a_{11}x_{1}&&\;+\;&&a_{12}x_{2}&&\;+\ cdots +\;&&a_{1n}x_{n}&&\;=0&\\a_{21}x_{1}&&\;+\;&&a_{22}x_{2}&&\;+\cdots +\; &&a_{2n}x_{n}&&\;=0&\\&&&&&&&&&&\vdots \quad &\\a_{m1}x_{1}&&\;+\;&&a_{m2}x_{2}&&\;+\ cdots +\;&&a_{mn}x_{n} &&\;=0&\end{alignedat}}\right\}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bd8572eebe4b09d3564daa060fae598d0b246bc)
Например, набор всех векторов ( x , y , z ) (над действительными или рациональными числами ), удовлетворяющих уравнениям

Нулевое пространство матрицы [ править ]
В конечномерном пространстве однородную систему линейных уравнений можно записать в виде одного матричного уравнения:

Множество решений этого уравнения известно как нулевое пространство матрицы. Например, описанное выше подпространство является нулевым пространством матрицы

Каждое подпространство K н может быть описан как нулевое пространство некоторой матрицы ( см. § Алгоритмы подробнее ниже).
Линейные параметрические уравнения [ править ]
Подмножество K н описываемое системой однородных линейных параметрических уравнений, является подпространством:
![{\displaystyle \left\{\left[\!\!{\begin{array}{c}x_{1}\\x_{2}\\\vdots \\x_{n}\end{array}}\ !\!\right]\in K^{n}:{\begin{alignedat}{7}x_{1}&&\;=\;&&a_{11}t_{1}&&\;+\;&&a_{12 }t_{2}&&\;+\cdots +\;&&a_{1m}t_{m}&\\x_{2}&&\;=\;&&a_{21}t_{1}&&\;+\;&&a_ {22}t_{2}&&\;+\cdots +\;&&a_{2m}t_{m}&\\&&\vdots \;\;&&&&&&&&&&\\x_{n}&&\;=\;&&a_{n1 }t_{1}&&\;+\;&&a_{n2}t_{2}&&\;+\cdots +\;&&a_{nm}t_{m}&\\\end{alignedat}}{\text{ for некоторые }}t_{1},\ldots ,t_{m}\in K\right\}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb71c80f35e28104a49c20580e8d8a1c8b6763b3)
Например, набор всех векторов ( x , y , z ), параметризованных уравнениями

является двумерным подпространством K 3 , если K — числовое поле (например, действительные или рациональные числа). [примечание 2]
Размах векторов [ править ]
В линейной алгебре систему параметрических уравнений можно записать в виде одного векторного уравнения:

Выражение справа называется линейной комбинацией векторов(2, 5, −1) и (3, −4, 2). Говорят, что эти два вектора охватывают результирующее подпространство.
В общем случае, линейная комбинация векторов v 1 , v 2 , ... , v k представляет собой любой вектор вида

Набор всех возможных линейных комбинаций называется промежутком :

Если векторы v 1 , ... , v k имеют n компонент, то их оболочка является подпространством K н . Геометрически пролет — это плоскость, проходящая через начало координат в n -мерном пространстве, определяемое точками v 1 , ... , v k .
- Пример
- Плоскость xz в R 3 может быть параметризован уравнениями

- Как подпространство, плоскость xz натянута векторами (1, 0, 0) и (0, 0, 1). Каждый вектор в плоскости xz можно записать как линейную комбинацию этих двух:

- Геометрически это соответствует тому факту, что в каждую точку плоскости xz можно добраться из начала координат, сначала переместившись на некоторое расстояние в направлении (1, 0, 0), а затем переместившись на некоторое расстояние в направлении (0, 0). , 1).
Пространство столбца и пространство строки [ править ]
Систему линейных параметрических уравнений в конечномерном пространстве можно записать и в виде одного матричного уравнения:
![{\displaystyle \mathbf {x} =A\mathbf {t} \;\;\;\;{\text{where}}\;\;\;\;A=\left[{\begin{alignedat} 2}2&&3&\\5&&\;\;-4&\\-1&&2&\end{alignedat}}\,\right]{\text{.}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bcfc4ef22388fd2887a19ddda5005d12d244bb3)
В этом случае подпространство состоит из всех возможных значений вектора x . В линейной алгебре это подпространство известно как пространство столбцов (или образ матрицы A. ) Это именно подпространство K н натянутый векторами-столбцами A .
Пространство строк матрицы — это подпространство, охватываемое ее векторами-строками. Пространство строк интересно, потому что оно является ортогональным дополнением нулевого пространства (см. ниже).
основа и размерность Независимость ,

В общем случае подпространство K н определяемый k параметрами (или натянутый k векторами), имеет размерность k . Однако из этого правила есть исключения. Например, подпространство K 3 натянутый тремя векторами (1, 0, 0), (0, 0, 1) и (2, 0, 3), это просто плоскость xz , где каждая точка на плоскости описывается бесконечно многими различными значениями t 1 , т 2 , т 3 .
В общем случае векторы v 1 , ... , v k называются линейно независимыми , если

для( т 1 , т 2 , ... , т k ) ≠ ( ты 1 , ты 2 , ... , ты k ). [примечание 3] Если v 1 , ..., v k линейно независимы, то координаты t 1 , ..., t k для вектора в промежутке определяются однозначно.
Базисом равна подпространства S является набор линейно независимых векторов, длина которых S . Число элементов в базисе всегда равно геометрической размерности подпространства. Любой остовный набор для подпространства можно превратить в базис, удалив избыточные векторы ( см. § Алгоритмы подробнее ниже).
- Пример
- Пусть S — подпространство R 4 определяется уравнениями
- Тогда векторы (2, 1, 0, 0) и (0, 0, 5, 1) являются базисом для S . В частности, каждый вектор, удовлетворяющий приведенным выше уравнениям, можно однозначно записать как линейную комбинацию двух базисных векторов:


- Подпространство S двумерно. Геометрически это плоскость в R 4 проходящий через точки (0, 0, 0, 0), (2, 1, 0, 0) и (0, 0, 5, 1).
Операции и отношения над подпространствами [ править ]
Включение [ править ]
Теоретико -множественное бинарное отношение включения задает частичный порядок на множестве всех подпространств (любой размерности).
Подпространство не может лежать в каком-либо подпространстве меньшей размерности. Если dim U = k — конечное число, и ⊂ W , то dim W = k тогда и только тогда, когда U = W. U
Перекресток [ править ]

Учитывая подпространства U и W векторного пространства V , то их пересечение U ∩ W := { v ∈ V : v является элементом как U , так и W } также является подпространством V . [10]
Доказательство:
- Пусть v и w — элементы U ∩ W . Тогда v и w принадлежат как , так и W. U Поскольку U подпространство, то v + w принадлежит U. — Аналогично, поскольку — подпространство, то v + w принадлежит W. W Таким образом, v + w принадлежит U ∩ W .
- Пусть v принадлежит U ∩ W и c — скаляр. Тогда v принадлежит и U и W. , Поскольку U и W являются подпространствами, c v принадлежит как U , так и W .
- Поскольку U и W — векторные пространства, то 0 принадлежит обоим множествам. Таким образом, 0 принадлежит U ∩ W .
Для каждого векторного V набор {0} являются V и сам подпространствами V. пространства [11] [12]
Сумма [ править ]
Если U и W — подпространства, их сумма — это подпространство [13] [14]

Например, сумма двух прямых — это плоскость, содержащая их обе. Размерность суммы удовлетворяет неравенству

Здесь минимум возникает только в том случае, если одно подпространство содержится в другом, а максимум — это наиболее общий случай. Размерность пересечения и сумма связаны следующим уравнением: [15]

Набор подпространств является независимым , если единственным пересечением любой пары подпространств является тривиальное подпространство. Прямая сумма — это сумма независимых подпространств, записанная как . Эквивалентное утверждение состоит в том, что прямая сумма является суммой подпространств при условии, что каждое подпространство вносит вклад в диапазон суммы. [16] [17] [18] [19]

Размерность прямой суммы то же самое, что сумма подпространств, но может быть сокращена, поскольку размерность тривиального подпространства равна нулю. [20]

Решетка подпространств [ править ]
Операции пересечения и суммирования превращают набор всех подпространств в ограниченную модульную решетку , где подпространство {0} , наименьший элемент , является единичным элементом операции суммирования, а тождественное подпространство V , наибольший элемент, является единичным элементом. операции пересечения.
Ортогональные дополнения [ править ]
Если является внутренним пространством продукта и является подмножеством , то ортогональное дополнение к , обозначенный , снова является подпространством. [21] Если конечномерен и является подпространством, то размеры и удовлетворить дополнительные отношения . [22] Более того, ни один вектор не ортогонален сам себе, поэтому и является прямой суммой и . [23] Двойное применение ортогональных дополнений возвращает исходное подпространство: для каждого подпространства . [24]






Эта операция, понимаемая как отрицание ( ), делает решетку подпространств (возможно, бесконечной ) решеткой с ортодополнениями (хотя и не дистрибутивной решеткой). [ нужна ссылка ]

В пространствах с другими билинейными формами некоторые, но не все, эти результаты все еще сохраняются. в псевдоевклидовых пространствах и симплектических векторных пространствах Например, существуют ортогональные дополнения. Однако эти пространства могут иметь нулевые векторы , ортогональные сами себе, и, следовательно, существуют подпространства такой, что . В результате эта операция не превращает решетку подпространств ни в булеву алгебру (ни в алгебру Гейтинга ). [ нужна ссылка ]

Алгоритмы [ править ]
Большинство алгоритмов работы с подпространствами включают сокращение строк . Это процесс применения элементарных операций над строками к матрице до тех пор, пока она не достигнет либо формы эшелона строк , либо формы уменьшенного эшелона строк . Сокращение строк имеет следующие важные свойства:
- Уменьшенная матрица имеет то же нулевое пространство, что и исходная.
- Сокращение строк не меняет диапазон векторов-строк, т. е. уменьшенная матрица имеет то же пространство строк, что и исходная.
- Сокращение строк не влияет на линейную зависимость векторов-столбцов.
Основа для пространства строк [ править ]
- Введите An m × n матрицу A .
- Выведите базис для пространства строк A .
- Используйте элементарные операции со строками, чтобы поместить A в форму эшелона строк.
- Ненулевые строки эшелонированной формы являются основой пространства строк A .
в статье о пространстве строк Пример см. .
Если вместо этого мы поместим матрицу A в форму уменьшенного эшелона строк, то результирующий базис пространства строк будет определен однозначно. Это обеспечивает алгоритм проверки равенства двух пространств строк и, как следствие, того, являются ли два подпространства K н равны.
Членство в подпространстве [ править ]
- Введите базис { b 1 , b 2 , ..., b k } для подпространства S пространства K. н и вектор v с n компонентами.
- Выходные данные Определяет, является ли v элементом S
- Создайте ( k + 1) × n матрицу A , строки которой являются векторами b 1 , ... , b k и v .
- Используйте элементарные операции со строками, чтобы поместить A в форму эшелона строк.
- Если ступенчатая форма имеет ряд нулей, то векторы { b 1 , ..., b k , v } линейно зависимы, и, следовательно, v ∈ S .
Основа для пространства столбцов [ править ]
- Входные данные An m × n матрица A
- Выходные данные Базис для пространства столбцов A
- Используйте элементарные операции со строками, чтобы поместить A в форму эшелона строк.
- Определите, какие столбцы эшелонированной формы имеют поворотные точки . Соответствующие столбцы исходной матрицы являются основой пространства столбцов.
в статье о пространстве столбцов Пример см. .
Это создает основу для пространства столбцов, которая является подмножеством исходных векторов-столбцов. Это работает, поскольку столбцы со сводками являются основой пространства столбцов ступенчатой формы, а сокращение строк не меняет отношений линейной зависимости между столбцами.
Координаты вектора [ править ]
- Введите базис { b 1 , b 2 , ..., b k } для подпространства S пространства K. н и вектор v ∈ S
- Выходные числа t 1 , t 2 , ..., t k такие, что v = t 1 b 1 + ··· + t k b k
- Создайте расширенную матрицу A, столбцы которой — b 1 ,..., b k , причем последний столбец — v .
- Используйте элементарные операции со строками, чтобы поместить A в форму уменьшенного эшелона строк.
- Выразите последний столбец сокращенной формы эшелона как линейную комбинацию первых k столбцов. Используемые коэффициенты представляют собой искомые числа t 1 , t 2 , ..., t k . (Это должны быть именно первые k записей в последнем столбце сокращенной формы эшелона.)
Если последний столбец сокращенной формы эшелона строк содержит точку поворота, то входной вектор v не лежит в S .
Основа для пустого пространства [ править ]
- Введите An m × n матрицу A .
- Выходные данные Базис для нулевого пространства A
- Используйте элементарные операции со строками, чтобы поместить A в форму сокращенного эшелона строк.
- Используя сокращенную форму звена строк, определите, какие из переменных x 1 , x 2 , ..., x n свободны. Напишите уравнения для зависимых переменных через свободные переменные.
- Для каждой свободной переменной x i выберите вектор в нулевом пространстве, для которого x i = 1 , а остальные свободные переменные равны нулю. Полученный набор векторов является основой нулевого пространства A .
смотрите в статье о пустом пространстве Пример .
Основание для суммы и пересечения двух подпространств [ править ]
Учитывая два подпространства U и W пространства V , базис суммы и пересечение можно рассчитать с помощью алгоритма Цассенхауза .


Уравнения для подпространства [ править ]
- Введите базис { b 1 , b 2 , ..., b k } для подпространства S пространства K. н
- Выведите матрицу An ( n − k ) × n , нулевое пространство которой равно S .
- Создайте матрицу A , строки которой — b 1 , b 2 , ..., b k .
- Используйте элементарные операции со строками, чтобы поместить A в форму уменьшенного эшелона строк.
- Пусть c 1 , c 2 , ..., c n — столбцы сокращенной ступенчатой формы. Для каждого столбца без опорной точки напишите уравнение, выражающее столбец как линейную комбинацию столбцов со сводной точкой.
- В результате получается однородная система n − k линейных уравнений с переменными c 1 ,..., c n . Матрица ( n − k ) × n , соответствующая этой системе, является искомой матрицей с нулевым пространством S .
- Пример
- Если сокращенная форма эшелона строк A равна
![{\displaystyle \left[{\begin{alignedat}{6}1&&0&&-3&&0&&2&&0\\0&&1&&5&&0&&-1&&4\\0&&0&&0&&1&&7&&-9\\0&&\;\;\;\;\;0&&\\;\;\;\; \;0&&\;\;\;\;\;0&&\;\;\;\;\;0&&\;\;\;\;\;0\end{alignedat}}\,\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/750dec11df599c8b8d1c8953c8838a30ffc713aa)
- тогда векторы-столбцы c 1 , ..., c 6 удовлетворяют уравнениям

- Отсюда следует, что векторы-строки матрицы A удовлетворяют уравнениям

- В частности, векторы-строки матрицы A являются основой нулевого пространства соответствующей матрицы.
См. также [ править ]
- Циклическое подпространство
- Инвариантное подпространство
- Мультилинейное обучение подпространству
- Факторпространство (линейная алгебра)
- Сигнальное подпространство
- Топология подпространства
Примечания [ править ]
- ^ Термин «линейное подпространство» иногда используется для обозначения плоских и аффинных подпространств . В случае векторных пространств над вещественными числами линейные подпространства, квартиры и аффинные подпространства также называются линейными многообразиями, чтобы подчеркнуть, что существуют также многообразия .
- ^ Как правило, K может быть любым полем такой характеристики , что данная целочисленная матрица имеет соответствующий ранг . Все поля содержат целые числа , но в некоторых полях некоторые целые числа могут равняться нулю.
- ^ Это определение часто формулируют по-другому: векторы v 1 , ..., v k линейно независимы, если т 1 v 1 + ··· + т k v k ≠ 0 для ( т 1 , т 2 , ..., т k ) ≠ (0, 0, ..., 0) . Оба определения эквивалентны.
Цитаты [ править ]
- ^ Халмош (1974), стр. 16-17, § 10
- ^ Антон (2005 , стр. 155)
- ^ Борегар и Фрели (1973 , стр. 176)
- ^ Херштейн (1964 , стр. 132)
- ^ Крейциг (1972 , стр. 200)
- ^ Неринг (1970 , стр. 20)
- ^ Хефферон (2020) с. 100, гл. 2, Определение 2.13.
- ^ MathWorld (2021) Подпространство.
- ^ ДюШато (2002) Основные факты о гильбертовом пространстве - конспекты занятий в Университете штата Колорадо по уравнениям в частных производных (M645).
- ^ Неринг (1970 , стр. 21)
- ^ Хефферон (2020) с. 100, гл. 2, Определение 2.13.
- ^ Неринг (1970 , стр. 20)
- ^ Неринг (1970 , стр. 21)
- ^ Операторы, связанные с векторным пространством.
- ^ Неринг (1970 , стр. 22)
- ^ Хефферон (2020) с. 148, гл. 2, §4.10
- ^ Экслер (2015) с. 21 § 1.40
- ^ Кацнельсон и Кацнельсон (2008), стр. 10–11, § 1.2.5.
- ^ Халмош (1974), стр. 28-29, § 18
- ^ Халмош (1974), стр. 30-31, § 19
- ^ Экслер (2015) с. 193, § 6.46
- ^ Экслер (2015) с. 195, § 6.50
- ^ Экслер (2015) с. 194, § 6.47
- ^ Экслер (2015) с. 195, § 6.51
Источники [ править ]
Учебник [ править ]
- Антон, Ховард (2005), Элементарная линейная алгебра (версия для приложений) (9-е изд.), Wiley International
- Экслер, Шелдон Джей (2015). Линейная алгебра сделана правильно (3-е изд.). Спрингер . ISBN 978-3-319-11079-0 .
- Борегар, Раймонд А.; Фрэли, Джон Б. (1973), Первый курс линейной алгебры: с дополнительным введением в группы, кольца и поля , Бостон: Houghton Mifflin Company , ISBN 0-395-14017-Х
- Халмос, Пол Ричард (1974) [1958]. Конечномерные векторные пространства (2-е изд.). Спрингер . ISBN 0-387-90093-4 .
- Хефферон, Джим (2020). Линейная алгебра (4-е изд.). Ортогональное издание. ISBN 978-1-944325-11-4 .
- Херштейн, Индиана (1964), Темы алгебры , Уолтем: издательство Blaisdell Publishing Company , ISBN 978-1114541016
- Кацнельсон, Ицхак ; Кацнельсон, Йонатан Р. (2008). (Краткое) Введение в линейную алгебру . Американское математическое общество . ISBN 978-0-8218-4419-9 .
- Крейциг, Эрвин (1972), Высшая инженерная математика (3-е изд.), Нью-Йорк: Wiley , ISBN 0-471-50728-8
- Лэй, Дэвид К. (22 августа 2005 г.), Линейная алгебра и ее приложения (3-е изд.), Аддисон Уэсли, ISBN 978-0-321-28713-7
- Леон, Стивен Дж. (2006), Линейная алгебра с приложениями (7-е изд.), Пирсон Прентис Холл
- Мейер, Карл Д. (15 февраля 2001 г.), Матричный анализ и прикладная линейная алгебра , Общество промышленной и прикладной математики (SIAM), ISBN 978-0-89871-454-8 , заархивировано из оригинала 1 марта 2001 г.
- Неринг, Эвар Д. (1970), Линейная алгебра и теория матриц (2-е изд.), Нью-Йорк: Wiley , LCCN 76091646
- Пул, Дэвид (2006), Линейная алгебра: современное введение (2-е изд.), Брукс/Коул, ISBN 0-534-99845-3
Интернет [ править ]
- Вайсштейн, Эрик Вольфганг . «Подпространство» . Математический мир . Проверено 16 февраля 2021 г.
- ДюШато, Поль (5 сентября 2002 г.). «Основные факты о гильбертовом пространстве» (PDF) . Государственный университет Колорадо . Проверено 17 февраля 2021 г.
Внешние ссылки [ править ]
- Стрэнг, Гилберт (7 мая 2009 г.). «Четыре фундаментальных подпространства» . Архивировано из оригинала 11 декабря 2021 г. Проверено 17 февраля 2021 г. - через YouTube .
- Стрэнг, Гилберт (5 мая 2020 г.). «Большая картина линейной алгебры» . Архивировано из оригинала 11 декабря 2021 г. Проверено 17 февраля 2021 г. - через YouTube .
