Векторные обозначения
Эта статья может сбивать с толку или быть непонятной читателям . В частности, в статье использовано множество терминов, которые нигде не определены в Википедии и не имеют общепринятого определения в современной математике: прямоугольный вектор, сферические векторы и т. д. Причем, кроме отведения, речь идет не об обозначениях, а о представлении векторы (или точки?) посредством координат.. ( январь 2024 г. ) |

Указывая от А к Б

Описание вектора стрелки v его координатами x и y дает изоморфизм векторных пространств.

Две последовательности координатных векторов одинаковой длины и возвращают одно число.

Перекрестное произведение относительно правой системы координат
В математике и физике является векторная запись широко используемой записью для представления векторов . [1] [2] которые могут быть евклидовыми векторами или, в более общем смысле, членами векторного пространства .
Для представления вектора общепринятым типографским соглашением является строчный и прямой жирный шрифт, как в v . Международная организация по стандартизации (ISO) рекомендует либо жирный курсив с засечками, как в v , либо нежирный курсив с засечками, подчеркнутый стрелкой вправо, как в . [3]

В высшей математике векторы часто обозначаются простым курсивом, как и любая переменная . [ нужна ссылка ]
История [ править ]
В 1835 году Джусто Беллавитис представил идею равнонаправленных отрезков прямой. что привело к понятию вектора как класса эквивалентности таких отрезков.

Термин «вектор» был придуман У. Р. Гамильтоном примерно в 1843 году, когда он открыл кватернионы — систему, которая использует векторы и скаляры для охвата четырехмерного пространства. Для кватерниона q = a + b i + c j + d k Гамильтон использовал две проекции: S q = a для скалярной части q и V q = b i + c j + d k для векторной части. Используя современные термины перекрестное произведение (×) и скалярное произведение (.), кватернионное произведение двух векторов p и q можно записать pq = – p . д + п × д . В 1878 году У. К. Клиффорд разделил эти два произведения, чтобы сделать операцию кватерниона полезной для студентов в своем учебнике « Элементы динамики» . Читая лекции в Йельском университете , Джозайя Уиллард Гиббс предложил обозначения для скалярного произведения и векторного произведения , которые были введены в векторном анализе . [4]
В 1891 году Оливер Хевисайд убеждал Кларендона отличать векторы от скаляров. критиковал использование греческих букв Тейтом и готических букв Максвеллом Он . [5]
В 1912 году Дж. Б. Шоу опубликовал свою «Сравнительную запись векторных выражений» в Бюллетене Общества кватернионов . [6] Впоследствии Александр Макфарлейн описал в той же публикации 15 критериев четкой экспрессии с помощью векторов. [7]
Векторные идеи были выдвинуты Германом Грассманом в 1841 году и снова в 1862 году на немецком языке . Но немецких математиков кватернионы интересовали не так сильно, как англоговорящих математиков. Когда Феликс Кляйн организовывал немецкую математическую энциклопедию , он поручил Арнольду Зоммерфельду стандартизировать векторную запись. [8] В 1950 году, когда издательство Academic Press опубликовало перевод Г. Куэрти второго издания второго тома « Лекций по теоретической физике» Зоммерфельда, векторные обозначения были предметом сноски: «В оригинальном немецком тексте векторы и их компоненты напечатаны в для этого перевода был принят более обычный способ типографского различия между ними». [9]
Прямоугольные координаты [ править ]

Учитывая декартову систему координат , вектор может быть определен его декартовыми координатами .
Обозначение кортежа [ править ]
Вектор v в n -мерном реальном координатном пространстве можно задать с помощью кортежа (упорядоченного списка) координат:

Иногда угловые скобки используются вместо круглых скобок. [10]

Матричное обозначение [ править ]
Вектор в строк или столбцов, также может быть указан как матрица содержащая упорядоченный набор компонентов. Вектор, заданный как матрица-строка, известен как вектор-строка ; тот, который указан как матрица-столбец, известен как вектор-столбец .

И снова n -мерный вектор может быть задан в любой из следующих форм с использованием матриц:



где v 1 , v 2 , …, v n - 1 , v n — компоненты v . В некоторых расширенных контекстах строка и вектор-столбец имеют разное значение; см . ковариацию и контравариантность векторов подробнее .
Обозначение единичного вектора [ править ]
Вектор в (или меньшее количество измерений, например где v z ниже равно нулю) можно определить как сумму скалярных кратных компонентов вектора с членами стандартного базиса в . Базис представлен единичными векторами , , и .





Трехмерный вектор может быть задан в следующей форме, используя обозначение единичного вектора:


где v x , v y и v z скалярные компоненты v . Скалярные компоненты могут быть положительными или отрицательными; абсолютное значение скалярной компоненты - это ее величина.
Полярные координаты [ править ]

Две полярные координаты точки на плоскости можно рассматривать как двумерный вектор. Такой вектор состоит из величины (или длины) и направления (или угла). Величина, обычно обозначаемая как r , представляет собой расстояние от начальной точки, начала координат , до изображаемой точки. Угол, обычно обозначаемый как θ ( греческая буква тета ), представляет собой угол, обычно измеряемый против часовой стрелки, между фиксированным направлением, обычно направлением положительной оси X , и направлением от начала координат до точки. Угол обычно уменьшают, чтобы он находился в пределах диапазона радианы или .


Обозначения упорядоченного множества и матриц [ править ]
Векторы могут быть заданы либо с использованием нотации упорядоченных пар (подмножество нотации упорядоченного множества, использующей только два компонента), либо с использованием матричной нотации, как в случае с прямоугольными координатами. В этих формах первым компонентом вектора является r (вместо v 1 ), а вторым компонентом является θ (вместо v 2 ). Чтобы отличить полярные координаты от прямоугольных координат, перед углом может стоять символ угла: .

Двумерные полярные координаты для v могут быть представлены как любое из следующего, используя обозначение упорядоченной пары или матрицы:




где r - величина, θ - угол, а символ угла ( ) является необязательным.
Прямая запись [ править ]
Векторы также можно задать с помощью упрощенных автономных уравнений, которые явно определяют r и θ . Это может быть громоздко, но полезно, чтобы избежать путаницы с двумерными прямоугольными векторами, возникающей из-за использования обозначений упорядоченных пар или матриц.
Двумерный вектор, величина которого равна 5 единицам и направление которого составляет π /9 радиан (20°), можно задать в любой из следующих форм:


Цилиндрические векторы [ править ]

Цилиндрический вектор — это расширение концепции полярных координат на три измерения. Это похоже на стрелку в цилиндрической системе координат . Цилиндрический вектор задается расстоянием в плоскости xy , углом и расстоянием от плоскости xy (высотой). Первое расстояние, обычно обозначаемое как r или ρ (греческая буква ро ), представляет собой величину проекции вектора на плоскость xy . Угол, обычно обозначаемый как θ или φ (греческая буква фи ), измеряется как смещение от линии, коллинеарной оси x , в положительном направлении; угол обычно уменьшается, чтобы находиться в пределах диапазона . Второе расстояние, обычно обозначаемое как h или z , — это расстояние от плоскости xy до конечной точки вектора.
Обозначения упорядоченного множества и матриц [ править ]
Цилиндрические векторы используют полярные координаты, где второй компонент расстояния объединяется с третьим компонентом для формирования упорядоченных троек (опять же, подмножества обозначений упорядоченного множества) и матриц. Перед углом может стоять символ угла ( ); Комбинация расстояние-угол-расстояние отличает цилиндрические векторы в этих обозначениях от сферических векторов в аналогичных обозначениях.
Трехмерный цилиндрический вектор v может быть представлен как любой из следующих, используя упорядоченный тройной или матричный обозначение:




Где r — величина проекции v на плоскость xy , θ — угол между положительной осью x и v , а h — высота от плоскости xy до конечной точки v . Опять же, символ угла ( ) является необязательным.
Прямая запись [ править ]
Цилиндрический вектор также можно задать напрямую, используя упрощенные автономные уравнения, которые определяют r (или ρ ), θ (или φ ) и h (или z ). При выборе имен переменных следует соблюдать единообразие; ρ не следует смешивать с θ и так далее.
Трехмерный вектор, величина проекции которого на плоскость xy равна 5 единицам, угол от положительной оси x равен π /9 радиан (20°), а высота от плоскости xy равна 3 единицам, может указываться в любой из следующих форм:




Сферические векторы [ править ]
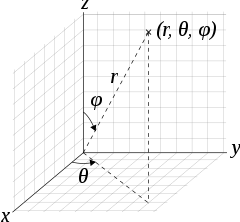
Сферический вектор — это еще один метод расширения концепции полярных векторов на три измерения. Это похоже на стрелку в сферической системе координат . Сферический вектор задается величиной, азимутальным углом и зенитным углом. Величина обычно обозначается как ρ . Угол азимута, обычно обозначаемый как θ , представляет собой смещение (против часовой стрелки) от положительной оси x . Зенитный угол, обычно обозначаемый как φ , представляет собой смещение от положительной оси z . Оба угла обычно уменьшаются до значения в диапазоне от нуля (включительно) до 2 π (не включая).
Обозначения упорядоченного множества и матриц [ править ]
Сферические векторы задаются как полярные векторы, где зенитный угол объединяется как третий компонент для формирования упорядоченных троек и матриц. Перед углами азимута и зенита может стоять символ угла ( ); префикс следует использовать последовательно для создания комбинации расстояние-угол-угол, которая отличает сферические векторы от цилиндрических.
Трехмерный сферический вектор v может быть представлен как любой из следующих, используя либо упорядоченный триплет, либо матричную запись:




Где ρ — магнитуда, θ — угол азимута, а φ — зенитный угол.
Прямая запись [ править ]
Подобно полярным и цилиндрическим векторам, сферические векторы можно задать с помощью упрощенных автономных уравнений, в данном случае для ρ , θ и φ .
Трехмерный вектор, величина которого равна 5 единицам, азимутальный угол которого равен π /9 радиан (20°) и зенитный угол которого равен π /4 радиан (45°), можно задать как:


Операции [ править ]
В любом заданном векторном пространстве определены операции сложения векторов и скалярного умножения. Нормированные векторные пространства также определяют операцию, известную как норма (или определение величины). Пространства внутреннего продукта также определяют операцию, известную как внутренний продукт. В внутренний продукт известен как скалярное произведение . В и дополнительная операция, известная как векторное произведение , также определена .

Сложение векторов [ править ]
Сложение векторов обозначается знаком плюс, используемым в качестве оператора между двумя векторами. Сумма двух векторов u и v будет представлена как:

Скалярное умножение [ править ]
Скалярное умножение представляется так же, как и алгебраическое умножение. Скаляр рядом с вектором (любой из них или оба могут быть в круглых скобках) подразумевает скалярное умножение. Два обычных оператора, точка и повернутый крест, также приемлемы (хотя повернутый крест почти никогда не используется), но они рискуют запутаться со скалярными произведениями и векторными произведениями, которые работают с двумя векторами. Произведение скаляра k на вектор v можно представить любым из следующих способов:


векторов и скалярное деление Вычитание
Используя алгебраические свойства вычитания и деления, а также скалярное умножение, также можно «вычесть» два вектора и «делить» вектор на скаляр.
Вычитание вектора выполняется путем добавления скаляра, кратного -1, со вторым векторным операндом к первому векторному операнду. Это можно представить с помощью знака минус в качестве оператора. Разницу между двумя векторами u и v можно представить одним из следующих способов:


Скалярное деление выполняется путем умножения векторного операнда на число, обратное скалярному операнду. Это можно представить с помощью дроби или знаков деления в качестве операторов. Частное вектора v и скаляра c может быть представлено в любой из следующих форм:



Норма [ править ]
Норма . вектора обозначается двойными чертами по обе стороны от вектора Норму вектора v можно представить как:

Норму также иногда обозначают отдельными полосками, например , но это можно спутать с абсолютным значением (который является разновидностью нормы).

Внутренний продукт [ править ]
Внутреннее произведение двух векторов (также известное как скалярное произведение, не путать со скалярным умножением) представляется в виде упорядоченной пары, заключенной в угловые скобки. Внутренний продукт двух векторов u и v будет представлен как:

Скалярное произведение [ править ]
В внутренний продукт также известен как скалярное произведение . В дополнение к стандартной нотации внутреннего произведения также может использоваться (и более распространено) нотация скалярного произведения (с использованием точки в качестве оператора). Скалярное произведение двух векторов u и v можно представить как:

В некоторых старых источниках скалярное произведение подразумевается между двумя векторами, написанными рядом. Это обозначение можно спутать с диадным произведением двух векторов.
Перекрестное произведение [ править ]
Перекрестное произведение двух векторов (в ) представлено с использованием повернутого креста в качестве оператора. Перекрестное произведение двух векторов u и v будет представлено как:

По некоторым соглашениям (например, во Франции и в некоторых областях высшей математики) это также обозначается клином, [11] что позволяет избежать путаницы с произведением-клином , поскольку они функционально эквивалентны в трех измерениях:

используются следующие обозначения В некоторой более старой литературе для векторного произведения между u и v :
![{\displaystyle [\mathbf {u},\mathbf {v}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a6e097210a422c1099e7fec3a9424aa7dc00d6fe)
Набла [ править ]
Векторные обозначения используются в исчислении через оператор Набла :


с векторным полем дивергенция записывается F как

а с векторным полем F ротор записывается как

См. также [ править ]
Ссылки [ править ]
- ^ Принципы и приложения математики в электронике связи . 1992. с. 123.
- ^ Гроб, Джозеф Джордж (1911). Векторный анализ . Дж. Уайли и сыновья.
- ^ «ISO 80000-2:2019 Величины и единицы. Часть 2: Математика» . Международная организация по стандартизации. Август 2019.
- ^ Эдвин Бидвелл Уилсон (1901) Векторный анализ, на основе лекций Дж. В. Гиббса в Интернет-архиве
- ^ Оливер Хевисайд , Электрический журнал , Том 28. Джеймс Грей, 1891. 109 ( альт )
- ^ Дж. Б. Шоу (1912) Сравнительная запись векторных выражений , Бюллетень Общества кватернионов через Hathi Trust .
- ^ Александр Макфарлейн (1912) Система обозначений для векторного анализа; с обсуждением основополагающих принципов из Бюллетеня Общества Кватернионов
- ^ Карин Райх (1995) Роль Арнольда Зоммерфельда в дискуссии о векторном исчислении
- ^ Механика деформируемых тел , с. 10, в Google Книгах
- ^ Райт, Ричард. «Предварительное исчисление 6-03 Векторы» . www.andrews.edu . Проверено 25 июля 2023 г.
- ^ Каджори, Флориан (2011). История математических обозначений . Дуврские публикации. п. 134 (Том 2). ISBN 9780486161167 .
