Ровер (исследование космоса)


Ровер предназначенное для (или иногда планетарный ровер ) - это планетарной поверхности, устройство разведки перемещения через шероховатую поверхность планеты или других планетарной массы небесных тел . Некоторые роверс были спроектированы как наземные транспортные средства , чтобы перевезти членов команды космического полета человека ; Другие были частично или полностью автономными роботами . Роверс обычно создается для приземления на другой планете (кроме Земли ) через Ландера в стиле космический корабль , [ 1 ] поручено собрать информацию о местности и взять образцы коры , такие как пыль, почва, породы и даже жидкости. Они являются важными инструментами в исследовании космоса .
Функции
[ редактировать ]Роверс прибывает на космический корабль и используется в условиях, которые очень отличаются от условий на Земле, что предъявляет некоторые требования к их дизайну.
Надежность
[ редактировать ]Роверс должен выдерживать высокий уровень ускорения, высоких и низких температур, давления , пыли, коррозии , космических лучей , оставшихся функциональных без ремонта в течение необходимого периода времени.
Автономия
[ редактировать ]Роверс, которые приземляются на небесные тела, далеко от Земли, таких как Марс разведка Rovers , не могут управлять дистанционным управлением в режиме реального времени, поскольку скорость, с которой перемещаются радиосигналы, слишком медленная для общения в режиме реального времени или почти в реальном времени . Например, отправка сигнала с Марса на Землю занимает от 3 до 21 минуты. Таким образом, эти Rovers способны автономно работать с небольшой помощью от управления наземным управлением в отношении навигации и сбора данных , хотя они по -прежнему требуют ввода человека для выявления многообещающих целей на расстоянии, и определение того, как позиционировать себя, чтобы максимизировать Солнечная энергия. [ 2 ] Предоставление роверу некоторых элементарных возможностей визуальной идентификации, чтобы сделать простые различия, может позволить инженерам ускорить разведку. [ 2 ] Во время выборочного выбора Robot Robot Robot Centennial Challenge, ровер, названный Cataglyphis , успешно продемонстрировал автономную навигацию, принятие решений и обнаружение выборки, поиск и возврат. [ 3 ]
Неколесные подходы
[ редактировать ]Другие конструкции Rover, которые не используют колесные подходы, возможны. механизмы, которые используют «ходьбу» на роботизированных ногах Возможно , прыжке, катяке и т. Д. Например, исследователи из Стэнфордского университета предложили «ежа», небольшой ровер в форме куба , который может контролировать, или даже вырваться из песчаной воронки, повернув вверх, чтобы сбежать, -для изучения поверхности низких гравитационных небесных тел. [ 4 ]
Прошлые миссии
[ редактировать ]
Луна
[ редактировать ]Lunokhod 0 (No.201)
[ редактировать ]Советский ровер был предназначен для того, чтобы стать первым бродячим роботом с дистанционным управлением на Луне , но разбился во время неудачного начала пусковой установки 19 февраля 1969 года.
Lunokhod 1
[ редактировать ]
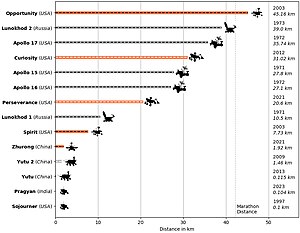
Lunokhod 1 Rover приземлился на Луне в ноябре 1970 года. [ 5 ] Это был первый робот с дистанционным управлением, который приземлился на любом небесном теле. Советский Союз запустил Лунокод 1 на борту космического корабля Luna 17 10 ноября 1970 года, и он вступил в лунную орбиту 15 ноября. Космический корабль, мягкий в моря районе 17 ноября. может спуститься на лунную поверхность, что она сделала в 06:28 UT. С 17 ноября 1970 года по 22 ноября 1970 года Ровер проехал 197 м, а во время 10 сессий связи вернулись 14 фотографий Луны крупным планом и 12 панорамных видов. Он также проанализировал лунную почву. Последняя успешная сессия связи с Lunokhod 1 была 14 сентября 1971 года, работая в течение 11 месяцев. [ 6 ]
Аполлон Лунный Ровинг
[ редактировать ]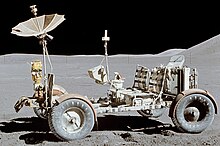
НАСА включало лунные бродячие транспортные средства в три «Аполлон» миссии : Аполлон 15 (которые приземлились на Луну 30 июля 1971 года), Аполлон 16 (который приземлился 21 апреля 1972 года) и Аполлон 17 (который приземлился 11 декабря 1972 года). [ 7 ]
Lunokhod 2
[ редактировать ]
Lunokhod 2 был вторым из двух безвиленных Lunar Rovers, приземленных на Луне Советским Союзом в рамках программы Lunokhod . Ровер стал оперативным на Луне 16 января 1973 года. [ 8 ] Это был второй бродячий робот с дистанционным управлением , который приземлился на любом небесном теле. Советский Союз запустил Лунокод 2 на борту космического корабля Luna 21 8 января 1973 года, а космический корабль мягкий в восточном краю региона Маре Серенитатис 15 января 1973 г. В 01:14 UT 16 января 1973 года. Lunokhod 2 работал около четырех месяцев, охватывал 39 км (24 мили) местности, включая холмистые зоны нагорья и риллеса , и отправил 86 панорамных изображений и более 80 000 телевизионных картин. [ 9 ] [ 10 ] [ 11 ] Основываясь на вращаниях колес Lunokhod 2, как было представлено 37 км (23 миль), но российские ученые из Московского государственного университета геодезии и картографии (Miigaik) пересмотрели это на расстоянии около 42,1–42,2 км (26,2–26,2 мио. ) на основе лунных разведывательных орбитальных ( LRO ) изображений лунной поверхности. [ 12 ] [ 13 ] Последующие дискуссии с их американскими коллегами закончились согласованным окончательным расстоянием 39 км (24 мили), что с тех пор застряло. [ 14 ] [ 15 ]
Lunokhod 3
[ редактировать ]Советский ровер был предназначен для того, чтобы стать третьим роботом с дистанционным управлением на Луне в 1977 году. Миссия была отменена из-за отсутствия наличия и финансирования, хотя ровер был построен.
Юту
[ редактировать ]
Chang'e 3 - это миссия китайской луны, которая включает роботизированную ровер Юту , названный в честь домашнего кролика Чанге , богини Луны в китайской мифологии. Запущенный в 2013 году с миссией Chang'e 3 , это первый в Китае Lunar Rover, первая мягкая посадка на Луне с 1976 года и первый ровер, который работал там с тех пор, как советский Lunokhod 2 прекратил деятельность 11 мая 1973 года. [ 16 ] Он был развернут на Луне 14 декабря 2013 года, и Ровер столкнулся с трудностями в конце второго лунного дня [ 17 ] После успешного выживания и успешного восстановления в первую 14-дневную лунную ночь (около месяца на Луне), [ 18 ] и не смог переехать после окончания второй лунной ночи, хотя она продолжала собирать полезную информацию в течение нескольких месяцев после этого. [ 19 ] В октябре 2015 года Юту установил рекорд на самый длинный операционный период для ровера на Луне. [ 20 ] 31 июля 2016 года Юту прекратила работу через 31 месяц, что намного больше, чем первоначальная ожидаемая продолжительность жизни в течение трех месяцев. [ 21 ]
Прагия (Чандрайаан-2 Ровер)
[ редактировать ]Чандрайаан-2 был второй лунной миссией Индии, состоящей из лунного орбитального отверстия, посадки по имени Викрам и ровера по имени Прагян . Ровер весит 27 кг, [ 22 ] имел шесть колес и должен был работать на солнечной энергии . [ 23 ] Запущенная 22 июля 2019 года, миссия вошла в лунную орбиту 20 августа. Пражян был уничтожен вместе со своим посадочным, Викрамом , когда она была внесена в аварию на Луне 6 сентября 2019 года и никогда не получил шанс развернуться. [ 24 ] [ 25 ]
Рашид
[ редактировать ]Рашид был лунным ровером, построенным MBRSC , который был запущен на бортовом ISPACE Lander под названием Hakuto-R. Ровер был запущен в ноябре 2022 года, но был уничтожен, когда авария Ландера приземлилась в апреле 2023 года. [ 26 ] Он был оснащен двумя камерами с высоким разрешением, микроскопической камерой для захвата мелких деталей и камерой тепловой визуализации. Ровер носил зонд Лангмюра , предназначенный для изучения плазмы Луны, и попытается объяснить, почему лунная пыль такая липкая. [ 27 ] Ровер должен был изучить лунную поверхность, подвижность на поверхности Луны и как разные поверхности взаимодействуют с лунными частицами. [ 28 ]
Sora-Q (Hakuto-R Mission 1 Rover)
[ редактировать ]Такара Томи , Джакса и Университет Дошиша сделали ровер для запуска на бортовом ISPACE Lander под названием Hakuto-R. Он был запущен в 2022 году, но был уничтожен, когда авария Ландера приземлилась в апреле 2023 года. [ 29 ] [ 30 ] [ 31 ]
Прагиан (Чандрайаан-3 Ровер)
[ редактировать ]Chandrayaan-3 -это миссия космического агентства Индии ( ISRO ), состоящая из лунного приземления и пражянского ровера . Это было повторно, чтобы продемонстрировать мягкую посадку после провала Ландера Чандрайяна- 2 Викрама . Он был запущен 14 июля 2023 года на стартовом носителе LVM-3 и соревновался около Южного полюса Луны 23 августа в 18.04 IST. 26 кг 6 -колесный ровер Pragyan спустился от Lander Belly, на поверхность луны, используя одну из боковых панелей в качестве рампы. Rover проведет химический анализ поверхности лунной на месте во время своей подвижности. [ 32 ] Ровер был развернут 23 сентября [ 33 ] и был помещен в спящий режим после достижения всех своих целей 3 сентября. Позже он умер во время этой лунной ночи. [ 34 ]
Перегрин Миссия Один
[ редактировать ]Перегрин выступил на Луне 8 января 2024 года, взяв с собой 5 Colmena Rovers и Iris Rover. [ 35 ] После отделения от исходного носителя произошла неисправность, предотвращая его выполнение своей миссии. Вместо этого космический корабль вернулся в атмосферу Земли , где он распался 18 января. [ 36 ]
Slim Rovers
[ редактировать ]У Slim Lander есть два ровер на борту, лунную экскурсионную машину 1 (LEV-1) (бункер) и лунный экскурсионный автомобиль 2 (LEV-2), крошечный ровер, разработанный JAXA в совместном сотрудничестве с Tomy , Sony Group и Университетом Дошиша . [ 37 ] Первый ровер имеет прямое на приземление общения. Второй ровер предназначен для того, чтобы изменить свою форму, чтобы пройти через место посадки в течение короткого срока службы в два часа. Слим был запущен 6 сентября 2023 года и достиг лунной орбиты 25 декабря 2023 года. Они два ровер были успешно развернуты и приземлились отдельно от Слима незадолго до того, как он приземлялся 19 января 2024 года. [ 38 ] LEV-1 провел шесть хмелей на лунной поверхности, а LEV-2 отображали Slim Lander на лунной поверхности. [ 39 ]
Джинчан
[ редактировать ]Chang'e 6 Миссия возврата образца также перенесла китайский ровер, называемый Джинчаном для проведения инфракрасной спектроскопии лунной поверхности и визуализации Chang'e 6 Lander на лунной поверхности. [ 40 ]
Марс
[ редактировать ]Проп-м
[ редактировать ]У советских Mars 2 и Mars 3 Landers на борту было небольшое 4,5 кг Prop-M Rover, которое перемещалось бы через поверхность на лыжах, в то время как подключен к Lander с 15-метровым пупочным. Два небольших металлических стержня были использованы для автономного предотвращения препятствий, так как радиосигналы с Земли заняли бы слишком много времени, чтобы управлять роверами с помощью дистанционного управления. Планируется, что Rover будет размещен на поверхности после приземления манипуляторным руком и перемещаться в поле зрения на телевизионные камеры и остановиться, чтобы провести измерения каждые 1,5 метра. Треки Rover в марсианской почве также были бы записаны для определения свойств материала. Из -за аварийной посадки Марса 2 и сбоя связи (15 секунд после посадки) Марса 3, ни один ровер не был развернут.
Marsokhod
[ редактировать ]Марсокод телекоммандом был советским ровером (гибрид, с обоими элементами управления и автоматическим), нацеленным на Марс, часть Марса 4NM и планируется начать после 1973 года (согласно планам 1970 года). Это должно было быть запущено ракетой N1 , которая никогда не летала успешно. [ 41 ]
Союрнер
[ редактировать ]
Миссия Mars Pathfinder включала Sojourner , первого ровера, который успешно развернул на другой планете. НАСА запустило Марс Патффинд 4 декабря 1996 года; он приземлился на Марсе в регионе под названием Chryse Planitia . 4 июля 1997 года [ 42 ] Из его посадки до окончательной передачи данных 27 сентября 1997 года Mars Pathfinder вернул 16 500 изображений из Lander и 550 изображений от Sojourner , а также данные более чем 15 химических анализов пород и почвы и обширных данных о ветрах и других погодных факторах Полем [ 42 ]
Бигл 2
[ редактировать ]Beagle 2 был разработан, чтобы исследовать Марс с небольшим «кротом» (планетарный подставной инструмент или плутон), который будет развернуть рукой. У Плутона был сжатый пружинный механизм, предназначенный для того, чтобы позволить ему перемещаться по поверхности со скоростью 20 мм в секунду и зарываться в землю, собирая подземный образец в полости в кончике. Бигл 2 потерпел неудачу, пытаясь приземлиться на Марсе в 2003 году.
Mars Exploration Rover Spirit
[ редактировать ]
Spirit - это роботизированный ровер на Марсе , активный с 2004 по 2010 год. Это был один из двух роверов миссии Марса продолжающейся по исследованию Ровера . Он успешно приземлился на Марсе в 04:35 Ground UTC 4 января 2004 года, за три недели до своего близнеца, Opportunity (MER-B) приземлился на другой стороне планеты. Его название было выбрано в рамках конкурса студенческих эссе, спонсируемых НАСА . Ровер застрял в конце 2009 года, и его последнее общение с Землей было отправлено 22 марта 2010 года.
Mars Exploration Rover
[ редактировать ]Возможность - это роботизированный ровер на планете Марс , активный с 2004 по начало 2019 года. Запущенный с Земли 7 июля 2003 года, он приземлился на Martian Meridiani Planum 25 января 2004 года, в 05:05 Ground UTC (около 13:15 Местное время ), через три недели после его двойного духа (MER-A) приземлился на другой стороне планеты. 28 июля 2014 года НАСА объявило об этой возможности , после того, как проехал более 40 км (25 миль) на планете Марс , установила новую «вне мира», так как ровер проехал наибольшее расстояние, превысив предыдущую запись по Rover Советского Союза 2, который прошел 39 км (24 мили). [ 43 ] [ 44 ]
Журон
[ редактировать ]
Zhurong Rover был китайским Марс -Ровером, которым управлял CNSA . Он был запущен из Wenchang Rocket 5 марта 23 июля 2020 года, 23:18 UTC. Он успешно развернулся на Марсе в 22 мая 2021 года, 02:40 UTC. [ 45 ] Он был разработан для 90Sols (93 дня Земли) и работал в течение 347Sols (356,5 Дни Земли) и проходил 1,921 км/1,194mi. Ровер был деактивирован 20 мая 2022 года из -за приближающегося песчаника и марсианской зимы, [ 46 ] В ожидании самореактивации во время благоприятного состояния. Ожидалось, что Журонг будет активировать в декабре 2022 года, но из -за чрезмерного накопления пыли на солнечной панели ровер не мог проснуться. 25 апреля 2023 года главный дизайнер Чжан Ронгцяо указал, что ровер может быть неактивным «навсегда». [ 47 ]
Активные миссии Ровера
[ редактировать ]Марс
[ редактировать ]Mars Science Laboratory Rover Curiosity
[ редактировать ]
26 ноября 2011 года миссия НАСА по научной лаборатории Марса была успешно запущена для Марса. Миссия успешно высадила роботизированного любопытства на поверхности Марса в августе 2012 года. Ровер в настоящее время помогает определить, мог ли Марс когда -либо поддерживать жизнь, и искать доказательства прошлой или настоящей жизни на Марсе . [ 48 ] [ 49 ]
Mars 2020 Perseverance Rover
[ редактировать ]НАСА Настойчивость является частью миссии Марса 2020 года , запущенной в 2020 году и приземлился на Марсе 18 февраля 2021 года. Он предназначен для изучения астробиологически значимой древней среды на Марсе, исследовать его поверхностные геологические процессы и историю, включая оценку Его прошлая обитаемость и потенциал для сохранения биосигнатур в доступных геологических материалах. [ 50 ]
Луна
[ редактировать ]Юту-2
[ редактировать ]Китайская миссия Chang'e 4 начала 7 декабря 2018 года, приземлилась и развернула Rover 3 января 2019 года на дальней части Луны . Это был первый в истории ровер, который работает на дальней стороне Луны.
В декабре 2019 года Yutu 2 Советского Союза , побил рекорд Lunar Longevity, ранее принадлежащий Lunokhod 1 Rover [ 51 ] который работал на лунной поверхности в течение одиннадцати лунных дней (321 Земли) и проходил общее расстояние 10,54 км (6,55 миль). [ 52 ]
В феврале 2020 года китайские астрономы впервые сообщили об образе последовательности лунного выброса с высоким разрешением , а также прямого анализа ее внутренней архитектуры. Они были основаны на наблюдениях, сделанных лунным проникновением радара (LPR) на борту yutu-2 Rover во время изучения дальней стороны луны . [ 53 ] [ 54 ]
Запланированные миссии Ровера
[ редактировать ]Этот раздел должен быть обновлен . ( Август 2018 г. ) |
Экзомарс Розалинда Франклин
[ редактировать ]Европейское космическое агентство ( ESA ) разработало и выполнило раннее прототипирование и тестирование Rosalind Franklin Rover. В результате России вторжения в Украину ESA Roscosmos разорвало связи с . и остался без стартового носителя для этой миссии Миссия теперь планирует запустить не раньше (net) 2028 с посадкой около 2030 года. [ 55 ]
Смотрите также
[ редактировать ]- Список роверов на внеземных телах
- Google Lunar X Приз
- Ландер (космический корабль)
- Лорак
- Луноход
- Марс Ровер ( экипаж )
- Танк на Луне , документальный фильм 2007 года
Ссылки
[ редактировать ]- ^ «Изучение планет - инструменты исследования - Роверс» . Музей воздуха и космического космоса . 2002. Архивировано из оригинала 25 июля 2009 года . Получено 3 января 2013 года .
- ^ Jump up to: а беременный Майкл Ширбер (8 июля 2012 г.). «Роверс будущего может принимать решения самостоятельно» . Журнал астробиологии . Мать -природа сеть.
- ^ Холл, Лоура (2016-09-08). «НАСА награждает 750 тыс. Долл. США в пример Rothate Robot Challenge» . Получено 2016-09-17 .
- ^ Чипман, Ян (2016-02-08). «Познакомьтесь с" ежом ": инженеры строят кубический ровер для исследования астероидов, кометов» . Phys.org . Получено 2016-02-11 .
- ^ «Лунный потерянный и найден: поиск старого космического корабля» . www.space.com. 27 марта 2006 г. Получено 2009-03-18 .
- ^ "Луна 17 и Лунокод 1" . www.zarya.info . Получено 2009-08-23 .
- ^ «Эксперимент: автомобиль Lunar Rover» . Ares.jsc.nasa.gov. Архивировано с оригинала на 2009-03-20 . Получено 2009-03-18 .
- ^ "Луна 21 и Лунокод 2" . www.zarya.info . Получено 2009-08-23 .
- ^ Эндрю Чайкин (1 марта 2004 г.). «Другие лунные посадки» . Air & Space/Smithsonian . Архивировано из оригинала 11 мая 2014 года . Получено 25 мая 2013 года .
- ^ Льюис Пейдж (16 марта 2012 г.). «Новая НАСА Снимка электрической корзины разработчика Game, найденная на Луне: зонд в низком проходе над радиоактивным ванном Garriott» . Реестр . Получено 25 мая 2013 года .
- ^ «Луноход 2 повторно» . НАСА. 13 марта 2012 года . Получено 25 мая 2013 года .
- ^ Лакдавалла, Эмили (21 июня 2013 г.). «Возможность возле расстояния Lunokhod? Не так близко, как мы думали!» Полем Планетарное общество . Получено 26 июня 2013 года .
- ^ Витце, Александра (19 июня 2013 г.). «Space Rovers в рекордной гонке» . Природа . 498 (7454). Nature News: 284–285. Bibcode : 2013natur.498..284W . doi : 10.1038/498284a . PMID 23783609 .
- ^ Сазерленд, С. (29 июля 2014 г.). «Возможность пробивает водительские записи без мира!» Полем Сеть погоды . Получено 20 января 2023 года .
- ^ «Трандинг по луне» . lroc.sese.asu.edu .
- ^ Molnár, László (24 мая 2013 г.). "Чанг-3 раскрыл-и это массивно!" Полем Получить космические технологии . Архивировано с оригинала 6 июня 2017 года . Получено 16 января 2018 года .
- ^ «Первый в Китае Moon Rover пережил« аномалия механического контроля » . Австралийская вещательная корпорация. 26 января 2014 года.
- ^ Бойл, Алан (12 января 2014 г.). «Китайская луна Ландер и Ровер просыпаются после нескольких недель сна» . NBC News. Архивировано из оригинала 14 января 2014 года.
- ^ МакКирди, Юань (13 февраля 2014 г.). «Вниз, но не выключен: Джейд Кролик возвращается из мертвых» . CNN .
- ^ Джефф Фуст (30 октября 2015 г.). «Неподвижный ровер Китая проходит чисто фигуративный веху» . Spacenews.
- ^ (29 октября 2015 г.). «Первый China Moon Rover устанавливает рекорд для самого долги» . Синьхуа. Архивировано с оригинала 2 ноября 2015 года.
- ^ «Isro отправит первого индейца в космос к 2022 году, как объявил премьер -министр, говорит доктор Джитендра Сингх» . pib.nic.in. Получено 2018-08-29 .
- ^ Наир, Авинаш (31 мая 2015 г.). «Isro, чтобы доставить« глаза и уши »Чандраян-2 к 2015 году» . Индийский экспресс . Получено 7 августа 2016 года .
- ^ «Чандрайан - 2 последнего обновления» . isro.gov.in. 7 сентября 2019 года. Архивировано с оригинала 8 сентября 2019 года . Получено 11 сентября 2019 года .
- ^ Vikram Lander, расположенный на лунной поверхности, не была мягкой посадкой: Isro. Times of India . 8 сентября 2019 года.
- ^ Насир, Сарват (19 сентября 2022 г.). «Окно запуска для миссии ОАЭ Луны раскрыто» . Национальный . Получено 20 сентября 2022 года .
- ^ «ОАЭ надеется, что этот крошечный лунный ровер откроет неисследованные части Луны» . CNN. 24 ноября 2020 года.
- ^ «ОАЭ устанавливает новые амбициозные временные шкалы для запуска Moon Rover» . ABC News. 14 апреля 2021 года.
- ^ Элизабет Хауэлл (2021-05-27). «Япония отправит преобразующий робот -мяч на Луну, чтобы проверить технологию Lunar Rover» . Space.com . Получено 2022-10-17 .
- ^ «Получение данных на лунной поверхности с трансформируемым лунным роботом, помогая развивать экипаж с под давлением ровера» . JAXA (пресс -релиз). 27 мая 2021 года . Получено 14 октября 2022 года .
- ^ «Это лунная экскурсия (LEV-2), который в ближайшем будущем будет ездить на Луну на Jaxa Slim Spacecraft» . Twitter Получено 8 ноября 2022 года .
- ^ "LVM-3 | Чандая-3" . nextspaceflight.com 2023-06-13 .
- ^ Рависетти, Мониша (2023-08-28). «Индийский Чандрайаан-3 берет температуру Луны возле Лунного Южного полюса в первый раз» . Space.com . Получено 2023-11-24 .
- ^ Чатурведи, Арпан (2023-09-03). «Миссия выполнена, Индия ставит Moon Rover, чтобы« спать » . Рейтер . Получено 2023-11-24 .
- ^ Белум, Мартин (2024-01-08). «Запуск NASA Peregrine 1: Вулканский кентавр ракета, несущая НАСА Луну Ландер, поднимается во Флориде - живые обновления» . Хранитель . ISSN 0261-3077 . Получено 2024-01-08 .
- ^ Фишер, Джеки Уотлс, Кристин (2024-01-08). «Перестеж -миссия отказывается от попытки посадки на луну после того, как страдает от« критической »потери топлива» . CNN . Получено 2024-01-09 .
{{cite web}}: Cs1 maint: несколько имен: список авторов ( ссылка ) - ^ Хирано, Даичи (7 октября 2022 года). "Транспортный автомобиль 2 (LV-2) размером с ламп 2 (LV-2) " Джакса Получено 22 октября
- ^ Чанг, Кеннет (2024-01-19). «Япония становится пятой страной, чтобы приземлиться на Луну» . New York Times .
- ^ Пресс-конференция о результатах и достижениях лунной посадки небольших демонстраций лунной посадки (SLIM) и небольших зондов (LEV) , возвращает 2024-01-25
- ^ Джонс, Эндрю (6 мая 2024 г.). «Chang'e-6 в Китае несет неожиданный ровер на Луну» . Spacenews . Архивировано из оригинала 8 мая 2024 года . Получено 8 мая 2024 года .
- ^ Советский грунт с Марса Archived April 8, 2010, at the Wayback Machine
- ^ Jump up to: а беременный «Марс Патфинд» . НАСА . Получено 2009-03-18 .
- ^ Вебстер, парень; Браун, Дуэйн (28 июля 2014 г.). «НАСА долгоживущие MARS Opportunity Rover запускает рекорд вождения вне мира» . НАСА . Получено 29 июля 2014 года .
- ^ Кнапп, Алекс (29 июля 2014 г.). «Opportunity Rover NASA устанавливает запись для вождения вне мира» . Форбс . Получено 29 июля 2014 года .
- ^ «Первый китайский зонд Марса успешно приземлился с ровером» . www.golem.de .
- ^ Чеунг, Рэйчел (13 марта 2023 г.). «Марс -ровер из Китая не двигался с сентября, сообщили НАСА Images» . Вице -новости .
- ^ Харт, Роберт (25 апреля 2023 г.). «Марс Ровер из Китая застрял после суровой марсианской зимы» . Форбс .
- ^ Персонал НАСА (26 ноября 2011 г.). «Научная лаборатория Марса» . НАСА . Получено 2011-11-26 .
- ^ «НАСА запускает Super-Size Rover на Марс:« Иди, иди! » " . Нью -Йорк Таймс . Ассошиэйтед Пресс. 26 ноября 2011 г. Получено 2011-11-26 .
- ^ Кит Коуминг (21 декабря 2012 г.). «Научная команда определения для 2020 года Марс Ровер» . НАСА . Science Ref . Получено 21 декабря 2012 года .
- ^ Фарффирдовый лунный ровер побивает рекорд Lunar Longevity. Леонард Дэвид, Space.com . 12 декабря 2019 года.
- ^ Хауэлл, Элизабет (19 декабря 2016 г.). " Lunokhod 1: 1 -й успешный Lunar Rover" , Space.com. Получено 31 мая 2018 года.
- ^ Чанг, Кеннет (26 февраля 2020 года). «Ровер Китая находит слои удивления под дальнейшей стороной Луны-миссия Chang'E-4, первая, приземлившаяся на лунной дальней стороне, демонстрирует обещание и опасность использования радара на земле в планетарной науке» . New York Times . Получено 27 февраля 2020 года .
- ^ Ли, Чунлай; и др. (26 февраля 2020 г.). «Пальтовая неглубокая подземная структура луны, представленная лунным проникновением Chang'E-4 Lunar Radar» . Наука достижения . 6 (9): eaay6898. Bibcode : 2020scia .... 6.6898L . doi : 10.1126/sciadv.aay6898 . PMC 7043921 . PMID 32133404 .
- ^ «FAQ:« Возрождение »миссии ESA Exomars Rosalind Franklin» . www.esa.int . Получено 2023-06-13 .




| Базы данных управления авторитетом : национальный |
|---|