Ровер (исследование космоса)


Ровер предназначенное (или иногда планетоход ) — поверхности планеты, устройство для исследования для перемещения по неровной поверхности планеты или других планетарной массы небесных тел . Некоторые марсоходы были разработаны как наземные транспортные средства для перевозки членов пилотируемого космического экипажа; другие были частично или полностью автономными роботами . Роверы обычно создаются для приземления на другую планету (кроме Земли ) с помощью посадочный модуль , напоминающего космического корабля . [1] ему было поручено собрать информацию о местности и взять образцы коры , такой как пыль, почва, камни и даже жидкости. Они являются важными инструментами в освоении космоса .
Функции
[ редактировать ]Роверы прибывают на космические корабли и используются в условиях, весьма отличных от земных, что предъявляет определенные требования к их конструкции.
Надежность
[ редактировать ]Роверам приходится выдерживать высокие уровни ускорения, высокие и низкие температуры, давление , пыль, коррозию , космические лучи , сохраняя работоспособность без ремонта в течение необходимого периода времени.
Автономия
[ редактировать ]Марсоходы, которые приземляются на небесные тела, расположенные далеко от Земли, такие как марсоходы для исследования Марса , не могут управляться дистанционно в режиме реального времени, поскольку скорость, с которой распространяются радиосигналы, слишком мала для связи в реальном времени или почти в реальном времени . Например, отправка сигнала с Марса на Землю занимает от 3 до 21 минуты. Таким образом, эти марсоходы способны работать автономно с небольшой помощью со стороны наземного управления в том, что касается навигации и сбора данных , хотя им по-прежнему требуется участие человека для определения перспективных целей на расстоянии, к которым можно двигаться, и определения того, как расположиться для достижения максимальной эффективности. солнечная энергия. [2] Предоставление марсоходу некоторых элементарных возможностей визуальной идентификации, позволяющих проводить простые различия, может позволить инженерам ускорить разведку. [2] Во время столетнего испытания робота для возврата образцов НАСА марсоход под названием Cataglyphis успешно продемонстрировал возможности автономной навигации, принятия решений, а также обнаружения, извлечения и возврата образцов. [3]
Неколесные подходы
[ редактировать ]Возможны и другие конструкции марсоходов, в которых не используются колесные подходы. механизмы, использующие «ходьбу» на роботизированных ногах Возможны , прыжки, перекатывание и т. д. Например, исследователи из Стэнфордского университета предложили «Еж», небольшой марсоход кубической формы, который может контролируемо подпрыгивать – или даже выкручиваться из песчаной воронки, поворачиваясь вверх, чтобы спастись – для исследования поверхности с низкой гравитацией . небесных тел [4]
Прошлые миссии
[ редактировать ]
Луна
[ редактировать ]Lunokhod 0 (No.201)
[ редактировать ]Советский марсоход должен был стать первым передвижным роботом с дистанционным управлением на Луне , но разбился во время неудачного запуска ракеты-носителя 19 февраля 1969 года.
Луноход 1
[ редактировать ]
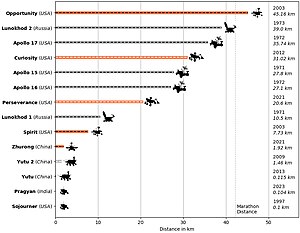
Луноход -1 приземлился на Луне в ноябре 1970 года. [5] Это был первый передвижной робот с дистанционным управлением, приземлившийся на какое-либо небесное тело. Советский Союз запустил «Луноход-1» на борту космического корабля «Луна-17» 10 ноября 1970 года, и он вышел на лунную орбиту 15 ноября. Космический корабль совершил мягкую посадку в районе Моря дождей 17 ноября. Посадочный модуль имел двойные аппарели, с которых вышел «Луноход-1». смог спуститься на поверхность Луны, что и сделал в 06:28 UT. С 17 по 22 ноября 1970 года марсоход прошёл 197 м и за 10 сеансов связи передал 14 снимков Луны крупным планом и 12 панорамных изображений. Он также проанализировал лунный грунт. Последний успешный сеанс связи с «Луноходом-1» состоялся 14 сентября 1971 года. Проработав 11 месяцев, [6]
Лунный вездеход «Аполлон»
[ редактировать ]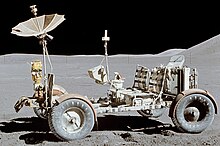
НАСА включило лунные вездеходы в три Аполлона миссии : Аполлон-15 (приземлившийся на Луну 30 июля 1971 года), Аполлон-16 (приземлившийся 21 апреля 1972 года) и Аполлон-17 (приземлившийся 11 декабря 1972 года). [7]
Луноход 2
[ редактировать ]
«Луноход -2» был вторым из двух беспилотных луноходов, приземлившихся на Луну Советским Союзом в рамках программы «Луноход» . Ровер начал работу на Луне 16 января 1973 года. [8] Это был второй передвижной робот с дистанционным управлением , приземлившийся на какое-либо небесное тело. Советский Союз запустил «Луноход-2» на борту космического корабля «Луна-21» 8 января 1973 года, а космический корабль совершил мягкую посадку на восточной окраине региона Моря Серенитатис 15 января 1973 года. «Луноход-2» спустился с двойных аппарелей спускаемого аппарата на поверхность Луны. в 01:14 UT 16 января 1973 года. Луноход-2 проработал около четырех месяцев, покрыл 39 км (24 мили) местности, включая холмистые возвышенности и реки , и отправил обратно 86 панорамных изображений и более 80 000 телевизионных изображений. [9] [10] [11] Судя по вращению колес, предполагалось, что Луноход-2 преодолел 37 км (23 мили), но российские ученые из Московского государственного университета геодезии и картографии (МИИГАиК) пересмотрели это расстояние до примерно 42,1–42,2 км (26,2–26,2 миль). ) на основе сделанных Lunar Reconnaissance Orbiter ( LRO ). изображений лунной поверхности, [12] [13] Последующие обсуждения с американскими коллегами закончились согласованной окончательной дистанцией в 39 км (24 мили), которая с тех пор сохраняется. [14] [15]
Луноход 3
[ редактировать ]Советский марсоход должен был стать третьим передвижным роботом с дистанционным управлением на Луне в 1977 году. Миссия была отменена из-за отсутствия пусковой установки и финансирования, хотя марсоход был построен.
Юту
[ редактировать ]
«Чанъэ-3» — китайская лунная миссия, включающая роботизированный вездеход «Юйту» , названный в честь домашнего кролика Чанъэ , богини Луны в китайской мифологии. Запущенный в 2013 году с миссией «Чанъэ-3» , это первый луноход Китая, первая мягкая посадка на Луну с 1976 года и первый марсоход, работавший там с тех пор, как советский « Луноход-2» прекратил работу 11 мая 1973 года. [16] Он был отправлен на Луну 14 декабря 2013 года, и ближе к концу второго лунного дня у марсохода возникли трудности в работе. [17] после выживания и успешного восстановления в первую 14-дневную лунную ночь (около месяца на Луне), [18] и не мог двигаться после окончания второй лунной ночи, хотя продолжал собирать полезную информацию еще несколько месяцев после этого. [19] В октябре 2015 года Юту установил рекорд по продолжительности эксплуатации марсохода на Луне. [20] 31 июля 2016 года Yutu прекратила свою деятельность через 31 месяц, что значительно превышает первоначальный ожидаемый срок службы в три месяца. [21]
Прагян (марсоход Чандраян-2)
[ редактировать ]«Чандраян-2» была второй лунной миссией Индии, состоящей из лунного орбитального аппарата, спускаемого аппарата « Викрам » и марсохода « Прагян» . Ровер массой 27 кг, [22] имел шесть колес и должен был работать на солнечной энергии . [23] Запущенная 22 июля 2019 года миссия вышла на лунную орбиту 20 августа. Pragyan был уничтожен вместе со своим посадочным модулем Vikram во время аварийной посадки на Луну 6 сентября 2019 года и так и не получил возможности развернуться. [24] [25]
Рашид
[ редактировать ]Рашид был луноходом, построенным MBRSC для запуска на борту посадочного модуля Ispace под названием Hakuto-R. Марсоход был запущен в ноябре 2022 года, но был разрушен в результате крушения спускаемого аппарата в апреле 2023 года. [26] Он был оснащен двумя камерами высокого разрешения, микроскопической камерой для съемки мелких деталей и тепловизионной камерой. Ровер нес на борту зонд Ленгмюра , предназначенный для изучения лунной плазмы и попытающийся объяснить, почему лунная пыль такая липкая. [27] Ровер должен был изучать лунную поверхность, подвижность на поверхности Луны и то, как различные поверхности взаимодействуют с лунными частицами. [28]
SORA-Q (марсоход Хакуто-Р Миссии 1)
[ редактировать ]Такара Томи , JAXA и Университет Дошиша создали марсоход под названием Hakuto-R для запуска на борту посадочного модуля Ispace . Он был запущен в 2022 году, но был разрушен в результате крушения спускаемого аппарата в апреле 2023 года. [29] [30] [31]
Прагян (марсоход Чандраян-3)
[ редактировать ]«Чандраян-3» — миссия Индийского космического агентства ( ISRO ), состоящая из лунного корабля и «Прагьян» марсохода . Это была повторная попытка продемонстрировать мягкую посадку после провала Чандраяана- 2 спускаемого аппарата «Викрам» . Он был запущен 14 июля 2023 года на ракете-носителе LVM-3 и совершил мягкую посадку возле южного полюса Луны 23 августа в 18:04 по восточному стандартному времени. Шестиколесный марсоход Pragyan массой 26 кг спустился с днища посадочного модуля на поверхность Луны, используя одну из своих боковых панелей в качестве трапа. Ровер будет проводить химический анализ лунной поверхности на месте во время своего перемещения. [32] Ровер был запущен 23 сентября. [33] и был переведен в спящий режим после выполнения всех поставленных задач 3 сентября. Позже он умер в ту лунную ночь. [34]
Перегрин, миссия первая
[ редактировать ]Peregrine отправился к Луне 8 января 2024 года, взяв с собой 5 Colmena марсоходов и марсоход Iris . [35] После отделения от ракеты-носителя возникла неисправность, не позволившая ей выполнить свою миссию. Вместо этого космический корабль вернулся в атмосферу Земли , где распался 18 января. [36]
SLIM вездеходы
[ редактировать ]На борту посадочного модуля SLIM находятся два марсохода: Lunar Excursion Vehicle 1 (LEV-1) (бункер) и Lunar Excursion Vehicle 2 (LEV-2), крошечный марсоход, разработанный JAXA в сотрудничестве с Tomy , Sony Group и Университетом Дошиша . [37] Первый марсоход имеет прямую связь с Землей. Второй марсоход предназначен для изменения своей формы и перемещения вокруг места посадки за короткий срок службы, составляющий два часа. SLIM был запущен 6 сентября 2023 года и достиг лунной орбиты 25 декабря 2023 года. Два марсохода были успешно развернуты и приземлились отдельно от SLIM незадолго до своей приземления 19 января 2024 года. [38] LEV-1 совершил шесть прыжков по поверхности Луны, а LEV-2 получил изображение спускаемого аппарата SLIM на поверхности Луны. [39]
Идун Сянцзи
[ редактировать ]«Чанъэ-6» Миссия по возвращению образцов также включала китайский марсоход под названием «Идун Сянцзи» для проведения инфракрасной спектроскопии лунной поверхности и получения изображений спускаемого аппарата «Чанъэ-6» на лунной поверхности. [40]
Марс
[ редактировать ]ПрОП-М
[ редактировать ]Советские посадочные аппараты «Марс-2» и «Марс-3» имели на борту небольшой вездеход ПрОП-М массой 4,5 кг , который должен был передвигаться по поверхности на лыжах, будучи соединенным с посадочным модулем 15-метровым шлангокабелем. Два небольших металлических стержня использовались для автономного обхода препятствий, поскольку радиосигналам с Земли потребовалось бы слишком много времени, чтобы управлять марсоходами с помощью дистанционного управления. Планировалось, что марсоход после приземления будет выведен на поверхность с помощью манипулятора и будет перемещаться в поле зрения телекамер и останавливаться для проведения измерений через каждые 1,5 метра. Следы марсохода в марсианской почве также могли быть записаны для определения свойств материала. Из-за аварийной посадки «Марса-2» и сбоя связи (через 15 секунд после приземления) «Марса-3» ни один марсоход не был задействован.
Marsokhod
[ редактировать ]Марсоход ) был советским марсоходом (гибридным, с телеуправлением и автоматическим управлением , нацеленным на Марс, входящим в состав программы Mars 4NM и стартовавшим после 1973 года (согласно планам 1970 года). Его должна была запустить ракета Н1 , которая так и не полетела успешно. [41]
Временник
[ редактировать ]
В состав миссии Mars Pathfinder входил Sojourner , первый марсоход, успешно развернувшийся на другой планете. НАСА запустило Mars Pathfinder 4 декабря 1996 года; он приземлился на Марсе в районе под названием Chryse Planitia 4 июля 1997 года. [42] С момента приземления до окончательной передачи данных 27 сентября 1997 года Mars Pathfinder передал 16 500 изображений с посадочного модуля и 550 изображений с Sojourner , а также данные более чем 15 химических анализов горных пород и почвы, а также обширные данные о ветрах и других погодных факторах. . [42]
Бигль 2
[ редактировать ]Beagle 2 был разработан для исследования Марса с помощью небольшого «крота» (Planetary Undersurface Tool или PLUTO), который можно было развернуть с помощью руки. У ПЛУТО был механизм со сжатой пружиной, позволяющий ему перемещаться по поверхности со скоростью 20 мм в секунду и зарываться в землю, собирая образец подповерхностных слоев в полости на его кончике. «Бигль-2» потерпел неудачу при попытке приземлиться на Марс в 2003 году.
Марсоход Spirit
[ редактировать ]
Spirit — роботизированный вездеход на Марсе , действовавший с 2004 по 2010 год. Это был один из двух марсоходов миссии НАСА текущей по исследованию Марса . Он успешно приземлился на Марсе в 04:35 по Гринвичу 4 января 2004 года, за три недели до того, как его близнец « Оппортьюнити» (MER-B) приземлился на другой стороне планеты. Его название было выбрано в результате конкурса студенческих сочинений, спонсируемого НАСА . Ровер застрял в конце 2009 года, а его последнее сообщение с Землей было отправлено 22 марта 2010 года.
Марсоход Opportunity для исследования Марса
[ редактировать ]Opportunity — роботизированный вездеход на планете Марс , действовавший с 2004 по начало 2019 года. Запущенный с Земли 7 июля 2003 года, он приземлился на марсианском уровне Меридиана 25 января 2004 года в 05:05 по наземному всемирному координированному времени (около 13:15). по местному времени ), через три недели после того, как его близнец Spirit (MER-A) приземлился на другом конце планеты. 28 июля 2014 года НАСА объявило, что « Оппортьюнити» , проехав более 40 км (25 миль) по планете Марс , установил новый «внеземной» рекорд, поскольку марсоход проехал наибольшее расстояние, превзойдя предыдущий рекорд. советским марсоходом «Луноход-2» , преодолевшим 39 км (24 мили). [43] [44]
Журонг
[ редактировать ]
Марсоход Чжуронг — китайский марсоход, которым управляет CNSA . Он был запущен из Вэньчана ракетой- носителем «Великий поход 5» 23 июля 2020 года в 23:18 по всемирному координированному времени. Он успешно развернулся на Марсе 22 мая 2021 года в 02:40 по всемирному координированному времени. [45] Он был рассчитан на 90 сол (93 земных дня), проработал 347 сол (356,5 земных дней) и прошёл 1,921 км/1,194 мили. Марсоход был деактивирован 20 мая 2022 года из-за приближающейся песчаной бури и марсианской зимы. [46] ожидание самореактивации при благоприятных условиях. Ожидалось, что Чжужун возобновит работу в декабре 2022 года, но из-за чрезмерного скопления пыли на солнечной панели марсоход не смог проснуться самостоятельно. 25 апреля 2023 года главный конструктор Чжан Жунцяо сообщил, что марсоход может быть бездействующим «навсегда». [47]
Активные миссии ровера
[ редактировать ]Марс
[ редактировать ]научной лаборатории Марса Марсоход «Кьюриосити»
[ редактировать ]
НАСА 26 ноября 2011 года миссия Марсианской научной лаборатории была успешно запущена на Марс. Миссия успешно посадила роботизированный марсоход Curiosity на поверхность Марса в августе 2012 года. В настоящее время марсоход помогает определить, могла ли когда-либо на Марсе существовать жизнь, и ищет доказательства прошлой или настоящей жизни на Марсе . [48] [49]
Марс 2020 «Настойчивость» Марсоход
[ редактировать ]Марсоход НАСА Perseverance является частью миссии Mars 2020 , запущенной в 2020 году и приземлившейся на Марсе 18 февраля 2021 года. Он предназначен для исследования астробиологически значимой древней среды на Марсе, изучения геологических процессов и истории ее поверхности, включая оценку его прошлая обитаемость и потенциал сохранения биосигнатур в доступных геологических материалах. [50]
Луна
[ редактировать ]Юту-2
[ редактировать ]Китайская «Чанъэ-4» миссия стартовала 7 декабря 2018 года, приземлилась и развернула марсоход 3 января 2019 года на обратной стороне Луны . Это был первый марсоход, работавший на обратной стороне Луны.
В декабре 2019 года «Юйту-2» побил рекорд лунного долголетия, ранее принадлежавший советскому марсоходу « Луноход-1» . [51] который проработал на поверхности Луны одиннадцать лунных дней (321 земной день) и преодолел общее расстояние 10,54 км (6,55 миль). [52]
В феврале 2020 года китайские астрономы впервые предоставили изображение в высоком разрешении последовательности лунного выброса , а также прямой анализ его внутренней архитектуры. Они были основаны на наблюдениях, сделанных лунным проникающим радаром (LPR) на борту марсохода Yutu-2 во время изучения обратной стороны Луны . [53] [54]
Планируемые миссии марсохода
[ редактировать ]Этот раздел необходимо обновить . ( август 2018 г. ) |
ЭкзоМарс Розалинда Франклин
[ редактировать ]Европейское космическое агентство ( ЕКА ) спроектировало и провело раннее прототипирование и испытания марсохода Розалинд Франклин . результате России вторжения в Украину ЕКА Роскосмосом разорвало связи с В и осталось без ракеты-носителя для этой миссии. Теперь миссия планирует запуститься не ранее (NET) 2028 года с приземлением примерно в 2030 году. [55]
См. также
[ редактировать ]- Список марсоходов по внеземным телам
- Google Lunar X Prize
- Посадочный модуль (космический корабль)
- ЛОРАКС
- Луноход
- Марсоход ( с экипажем )
- Танк на Луне , документальный фильм 2007 года.
Ссылки
[ редактировать ]- ^ «Исследование планет — инструменты исследования — марсоходы» . Музей авиации и космонавтики . 2002. Архивировано из оригинала 25 июля 2009 года . Проверено 3 января 2013 г.
- ^ Перейти обратно: а б Майкл Ширбер (8 июля 2012 г.). «Роверы будущего смогут принимать решения самостоятельно» . Журнал астробиологии . Сеть «Мать-природа».
- ^ Холл, Лора (08 сентября 2016 г.). «НАСА наградило 750 тысяч долларов за конкурс роботов по возврату образцов» . Проверено 17 сентября 2016 г.
- ^ Чипман, Ян (08 февраля 2016 г.). «Знакомьтесь, «Ежик»: Инженеры строят кубообразный марсоход для исследования астероидов, комет» . Физика.орг . Проверено 11 февраля 2016 г.
- ^ «Лунные находки: поиск старого космического корабля» . www.space.com. 27 марта 2006 г. Проверено 18 марта 2009 г.
- ^ «Луна-17 и Луноход-1» . www.zarya.info . Проверено 23 августа 2009 г.
- ^ «Эксперимент: Лунный вездеход» . Ares.jsc.nasa.gov. Архивировано из оригинала 20 марта 2009 г. Проверено 18 марта 2009 г.
- ^ «Луна-21 и Луноход-2» . www.zarya.info . Проверено 23 августа 2009 г.
- ^ Андрей Чайкин (1 марта 2004 г.). «Другие высадки на Луну» . Воздух и космос/Смитсоновский институт . Архивировано из оригинала 11 мая 2014 года . Проверено 25 мая 2013 г.
- ^ Льюис Пейдж (16 марта 2012 г.). «Новый снимок НАСА электрической тележки разработчика игр НАЙДЕН НА ЛУНЕ: зонд пролетел над радиоактивной ванной-вездеходом Гэрриота» . Регистр . Проверено 25 мая 2013 г.
- ^ «Возвращение к Луноходу-2» . НАСА. 13 марта 2012 года . Проверено 25 мая 2013 г.
- ^ Лакдавалла, Эмили (21 июня 2013 г.). «Оппортьюнити» рядом с рекордом дальности Лунохода? Не так близко, как мы привыкли думать!» . Планетарное общество . Проверено 26 июня 2013 г.
- ^ Витце, Александра (19 июня 2013 г.). «Космические вездеходы в рекордной гонке» . Природа . 498 (7454). Новости природы: 284–285. Бибкод : 2013Natur.498..284W . дои : 10.1038/498284a . ПМИД 23783609 .
- ^ Сазерленд, С. (29 июля 2014 г.). «Оппортьюнити» побил мировой рекорд вождения!» . Погодная сеть . Проверено 20 января 2023 г.
- ^ «Путешествие по Луне» . lroc.sese.asu.edu .
- ^ Мольнар, Ласло (24 мая 2013 г.). «Раскрытие Чанъэ-3 – и это огромно!» . Вытяните космические технологии . Архивировано из оригинала 6 июня 2017 года . Проверено 16 января 2018 г.
- ^ «У первого китайского лунохода возникла «неисправность механического управления» . Австралийская радиовещательная корпорация. 26 января 2014 г.
- ^ Бойл, Алан (12 января 2014 г.). «Китайский лунный корабль и марсоход просыпаются после нескольких недель сна» . Новости Эн-Би-Си. Архивировано из оригинала 14 января 2014 года.
- ^ Маккирди, Юан (13 февраля 2014 г.). «Вниз, но не наружу: Нефритовый Кролик возвращается из мертвых» . CNN .
- ^ Джефф Фауст (30 октября 2015 г.). «Неподвижный китайский марсоход преодолел чисто образную веху» . Космические новости.
- ^ Ан (29 октября 2015 г.). «Первый китайский луноход установил рекорд по продолжительности пребывания » Синьхуа. Архивировано из оригинала 2 ноября 2015 года.
- ^ «ISRO отправит первого индийца в космос к 2022 году, как объявил премьер-министр, - говорит доктор Джитендра Сингх» . pib.nic.in. Проверено 29 августа 2018 г.
- ^ Наир, Авинаш (31 мая 2015 г.). «ISRO поставит «глаза и уши» Чандраяана-2 к концу 2015 года» . Индийский экспресс . Проверено 7 августа 2016 г.
- ^ «Чандраян — последнее обновление 2» . isro.gov.in. 7 сентября 2019 года. Архивировано из оригинала 8 сентября 2019 года . Проверено 11 сентября 2019 г.
- ^ Посадочный модуль «Викрам», расположенный на поверхности Луны, не был мягкой посадкой: Исро. Времена Индии . 8 сентября 2019 г.
- ^ Насир, Сарват (19 сентября 2022 г.). «Раскрыто окно запуска миссии ОАЭ на Луну» . Национальный . Проверено 20 сентября 2022 г.
- ^ «ОАЭ надеются, что этот крошечный луноход откроет неизведанные части Луны» . Си-Эн-Эн. 24 ноября 2020 г.
- ^ «ОАЭ устанавливают новые амбициозные сроки запуска лунохода» . Новости Эй-Би-Си. 14 апреля 2021 г.
- ^ Элизабет Хауэлл (27 мая 2021 г.). «Япония отправит на Луну робот-трансформер для тестирования технологий лунохода» . Space.com . Проверено 17 октября 2022 г.
- ^ «Сбор данных на поверхности Луны с помощью трансформируемого лунного робота, способствующий разработке герметичного марсохода с экипажем» . ДЖАКСА (пресс-релиз). 27 мая 2021 г. Проверено 14 октября 2022 г.
- ^ «Это лунный экскурсионный аппарат (LEV-2), который в ближайшем будущем отправится на Луну на космическом корабле JAXA SLIM» . Твиттер . Проверено 8 ноября 2022 г.
- ^ «ЛВМ-3 | Чандраян-3» . nextspaceflight.com . Проверено 13 июня 2023 г.
- ^ Равизетти, Мониша (28 августа 2023 г.). «Индийский аппарат Chandrayaan-3 впервые измеряет температуру Луны вблизи южного полюса Луны» . Space.com . Проверено 24 ноября 2023 г.
- ^ Чатурведи, Арпан (3 сентября 2023 г.). «Миссия выполнена, Индия усыпляет луноход » . Рейтер . Проверено 24 ноября 2023 г.
- ^ Белам, Мартин (8 января 2024 г.). «Запуск NASA Peregrine 1: ракета Vulcan Centaur с лунным посадочным модулем NASA стартует во Флориде – текущие обновления» . Хранитель . ISSN 0261-3077 . Проверено 08 января 2024 г.
- ^ Фишер, Джеки Уоттлс, Кристин (8 января 2024 г.). «Миссия Peregrine отказалась от попытки высадки на Луну из-за «критической» потери топлива» . CNN . Проверено 9 января 2024 г.
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Хирано, Даичи (7 октября 2022 г.). «Лунный экскурсионный аппарат-2 размером с ладонь» . ДЖАКСА . Проверено 22 октября 2022 г.
- ^ Чанг, Кеннет (19 января 2024 г.). «Япония становится пятой страной, совершившей высадку на Луне» . Нью-Йорк Таймс .
- ^ Пресс-конференция, посвященная результатам и достижениям малого демонстратора приземления на Луну (SLIM) и малого зонда (LEV) на Луне , получено 25 января 2024 г.
- ^ Джонс, Эндрю (6 мая 2024 г.). «Китайский «Чанъэ-6» доставит на Луну марсоход-сюрприз» . Космические новости . Архивировано из оригинала 8 мая 2024 года . Проверено 8 мая 2024 г.
- ^ Советский грунт с Марса Archived April 8, 2010, at the Wayback Machine
- ^ Перейти обратно: а б «Марсианский следопыт» . НАСА . Проверено 18 марта 2009 г.
- ^ Вебстер, Гай; Браун, Дуэйн (28 июля 2014 г.). «Долгоживущий марсоход НАСА Opportunity установил внемировой рекорд вождения» . НАСА . Проверено 29 июля 2014 г.
- ^ Кнапп, Алекс (29 июля 2014 г.). «Марсоход НАСА Opportunity устанавливает рекорд по вождению за пределами мира» . Форбс . Проверено 29 июля 2014 г.
- ^ «Первый китайский марсианский зонд успешно приземлился с помощью марсохода» . www.golem.de .
- ^ Чунг, Рэйчел (13 марта 2023 г.). «Китайский марсоход не двигался с сентября, как показали изображения НАСА» . Вице-ньюс .
- ^ Харт, Роберт (25 апреля 2023 г.). «Китайский марсоход застрял во сне после суровой марсианской зимы» . Форбс .
- ^ Сотрудники НАСА (26 ноября 2011 г.). «Марсианская научная лаборатория» . НАСА . Проверено 26 ноября 2011 г.
- ^ «НАСА запускает на Марс суперразмерный вездеход: «Вперед, вперед!» " . Нью-Йорк Таймс . Ассошиэйтед Пресс. 26 ноября 2011 года . Проверено 26 ноября 2011 г.
- ^ Кейт Коуинг (21 декабря 2012 г.). «Группа научных определений для марсохода 2020 года» . НАСА . Наука Ссылка . Проверено 21 декабря 2012 г.
- ^ Китайский луноход на дальней стороне Луны побил рекорд лунного долголетия. Леонард Дэвид, Space.com . 12 декабря 2019 г.
- ↑ Хауэлл, Элизабет (19 декабря 2016 г.). « Луноход-1: первый успешный луноход» , Space.com. Проверено 31 мая 2018 г.
- ^ Чанг, Кеннет (26 февраля 2020 г.). «Китайский марсоход обнаружил слои сюрпризов под обратной стороной Луны. Миссия «Чанъэ-4», первая приземлившаяся на обратной стороне Луны, демонстрирует перспективность и опасность использования георадара в планетарной науке» . Нью-Йорк Таймс . Проверено 27 февраля 2020 г.
- ^ Ли, Чунлай; и др. (26 февраля 2020 г.). «Неглубокая подповерхностная структура обратной стороны Луны, обнаруженная лунным проникающим радаром ЧанъЭ-4» . Достижения науки . 6 (9): eaay6898. Бибкод : 2020SciA....6.6898L . дои : 10.1126/sciadv.aay6898 . ПМК 7043921 . ПМИД 32133404 .
- ^ «Часто задаваемые вопросы:« возрождение » миссии ЕКА ExoMars Rosalind Franklin» . www.esa.int . Проверено 13 июня 2023 г.




| Базы данных органов управления : Национальные |
|---|