Роевые роботизированные платформы
Роевые роботизированные платформы применяют роевую робототехнику [1] в сотрудничестве нескольких роботов. [2] Они черпают вдохновение из природы (например, механизмы коллективного решения проблем, наблюдаемые в природе, такие как медоносных пчел) . скопление [3] [4] ). Основная цель — управлять большим количеством роботов (с ограниченными возможностями восприятия/обработки информации) для выполнения общей задачи/проблемы. Аппаратные ограничения и стоимость роботизированных платформ ограничивают текущие исследования в области роевой робототехники, которые в основном выполняются с помощью программного обеспечения для моделирования (например, Stage, [5] АРГОС [6] ). С другой стороны, моделирование роевых сценариев, требующих большого количества агентов, чрезвычайно сложно и часто неточно из-за плохого моделирования внешних условий и ограничений вычислений.
Сравнение платформ
[ редактировать ]несколько мобильных роботизированных платформ Ранее было разработано для изучения роевых приложений.
| Робот | Датчик/Модуль | Движение/ Макс. Скорость | Размер/диаметр | Время автономной работы | Университет/Институт | Программное обеспечение с открытым исходным кодом | Аппаратное обеспечение с открытым исходным кодом | Описание | Изображение |
|---|---|---|---|---|---|---|---|---|---|
| АМИР | расстояние, свет, направление | колесо, 10 см/с | 6,5 см | 2 часа | Университет Путра, Малайзия | АМИР [7] представляет собой недорогую роевую роботизированную платформу, разработанную как мобильный робот с открытым исходным кодом и открытым аппаратным обеспечением. Многие исследования в основном посвящены агрегированию медоносных пчел. [3] (BEECLUST) проводилось с помощью AMiR (например, нечеткое принятие решений [4] ). |  | ||
| Алиса | расстояние, камера | колесо, 4 см/с | 2,2 см | 10 ч. | Федеральная политехническая школа Лозанны (EPFL), Швейцария | Алиса — это роевая роботизированная платформа, выполненная в очень маленьком корпусе. Алиса использовалась во многих приложениях для исследования роя, таких как вариант скопления тараканов. [8] | 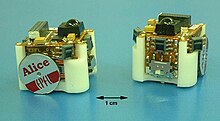 | ||
| Целлюло | структурированная камера с плотным распознаванием рисунка, емкостное сенсорное управление | всенаправленное шариковое колесо, 20 см/с | 7,5 см | 1-2 часа | Федеральная политехническая школа Лозанны (EPFL), Швейцария | Целлюло [9] [10] — это одна из первых в мире платформ роботов, объединяющая автономные рои и многопользовательское реальное взаимодействие с тактильной поддержкой. Первоначально созданная как образовательная платформа, в настоящее время в дополнение к образованию проводятся исследования в области реабилитации, игр и взаимодействия человека с компьютером с помощью Cellulo. |  | ||
| Колии | расстояние, свет, удар, пеленг, дальность | колесо / 35 см/с | 4 см | 1-3 ч. | CIL в Университете Линкольна , Великобритания | Колии [11] [12] — это недорогая платформа с открытым исходным кодом (открытое аппаратное обеспечение), разработанная для использования в роевых роботизированных приложениях. [13] |  | ||
| Колиас-III | Камера, расстояние, свет, удар, пеленг, дальность | колесо, 35 см/с | 4 см | 1-3 ч. | CIL в Университете Линкольна , Великобритания | Колиас-III [14] представляет собой расширенную версию микроробота Colias. В основном он был разработан для реализации биотехнологических систем машинного зрения. |  | ||
| Капли | Свет | вибрация | 4,4 см | 24 часа+ | Лаборатория Коррелла в Университете Колорадо | Капли — это открытая аппаратная и программная экспериментальная платформа для крупномасштабных исследований роения. [15] [16] [17] Команда собрала средства с помощью краудфандинга для создания 1000 таких «капель». [18] Бесконечные эксперименты благодаря механизированному полу, который одновременно служит глобальной средой связи для группового программирования. [19] | |||
| Электронная шайба | расстояние, камера, азимут, ускорение, микрофон | колесо / 13 см/с | 7,5 см | 1-10 ч. | Федеральная политехническая школа Лозанны (EPFL), Швейцария | Электронная шайба [21] — один из самых успешных роботов, созданный в первую очередь для образовательных целей. Однако из-за своей простоты его часто используют и в исследованиях роевой робототехники. Он оснащен заменяемыми пользователем батареями и временем автономной работы 2–4 часа. |  | ||
| Жасмин | расстояние, свет, направление | колесо, н/д | 3 см | 1-2 часа | Университет Штутгарта , Германия | Жасмин [23] — это роевая роботизированная платформа, которая использовалась во многих исследованиях роевой робототехники. [3] |  | ||
| Дрожь | расстояние, свет | вибрация, 1 см/с | 3,3 см | 3 – 24 ч. | Гарвардский университет , США | Дрожь [26] — это относительно недавняя роевая роботизированная платформа с новыми функциями, такими как групповая зарядка и групповое программирование. Благодаря своей простоте и низкому энергопотреблению он имеет длительное время автономной работы — до 24 часов. Роботы заряжаются вручную группами на специальной зарядной станции. | |||
| Кобот | расстояние, азимут, видение, компас | колесо, н/д | 12 см | 10 ч. | Исследовательская лаборатория КОВАН, Ближневосточный технический университет , Турция | Кобот [27] — это мобильный робот, специально разработанный для исследования роя роботов. Он имеет несколько датчиков, что делает его идеальной платформой для реализации различных сценариев роя роботов, таких как скоординированное движение. Время автономной работы около 10 часов. Он оснащен заменяемым пользователем аккумулятором, который заряжается вручную. Он использовался при реализации сценария самоорганизованного скопления. [28] | |||
| Мона | расстояние, удар, дальность, RF | колесо, 5 см/с | 6,5 см | Вечный | , Манчестерский университет Великобритания | Мона [31] — это робот с открытым исходным кодом, в основном предназначенный для тестирования предлагаемого Perpetual Robotic Swarm. [32] Он был спроектирован как модульная платформа, позволяющая развертывать дополнительные модули, прикрепленные к верхней части платформы, такие как беспроводная связь или доска визуализации. Последняя версия робота была разработана как роботизированная платформа для образовательных и исследовательских целей. |  | ||
| R-Один | подсветка, ИК, гироскоп, отбойник, акселерометр | колесо, 30 см/с | 10 см | 6 часов | Университет Райса , США | R-один [34] — недорогой робот для исследовательских и учебных целей. Он использовался в нескольких исследованиях по роевой робототехнике. | |||
| S-бот | свет, ИК, положение, сила, скорость, температура, влажность, аксессуары, микрофон | деревья | 12 см | 2 часа | Федеральная политехническая школа Лозанны (EPFL), Швейцария | S-бот [35] — одна из самых влиятельных и способных роевых роботизированных платформ, когда-либо созданных. S-боты имеют уникальную конструкцию захвата, способную захватывать объекты и других S-ботов. Время автономной работы составляет около 1 часа. | |||
| Спайдерино | дальность, свет, пеленг (с удлинителем) | шесть ног, 6 см/с | 8 см | 4-20 ч. | Университет Клагенфурта , Австрия | Спайдерино [37] — недорогой исследовательский робот, основанный на двигателе игрушечного паука Hexbug. В модификации голова робота заменяется напечатанным на 3D-принтере адаптером, состоящим из двух частей для размещения датчиков, батареи большей емкости и печатной платы (PCB) с микроконтроллером Arduino, модулем Wi-Fi и контроллером двигателя. | |||
| SwarmBot | дальность, азимут, камера, удар | колесо, 50 см/с | 12,7 см | 3 часа | Университет Райса , США | SwarmBot [38] — еще одна успешная платформа, разработанная для исследований в области роевой робототехники. Время автономной работы составляет около 3 часов, а роботы могут находить и стыковаться с зарядными станциями, расположенными на стенах. | |||
| Акустический рой [39] | микрофон, динамик, IMU | колесо, 44 см/с | 3 см | 1-3 ч. | Вашингтонский университет , США | Акустический рой [41] — это платформа, на которой крошечные роботы взаимодействуют друг с другом, используя акустические сигналы для навигации с точностью до сантиметра. Роевые устройства распределяются по поверхности, а также возвращаются к зарядной станции, где их можно подзарядить. |
Ссылки
[ редактировать ]- ^ Х. Хаманн, Swarm Robotics: формальный подход , Спрингер, Нью-Йорк, 2018. [ ISBN отсутствует ]
- ^ Шахин, Эрол. « Роевая робототехника: от источников вдохновения к областям применения. Архивировано 4 января 2017 г. в Wayback Machine ». Международный семинар по роевой робототехнике. Шпрингер Берлин Гейдельберг, 2004 г. [ ISBN отсутствует ]
- ^ Перейти обратно: а б с Шмикл, Томас и др. « Свяжитесь с нами: совместное принятие решений на основе столкновений роботов ». Автономные агенты и мультиагентные системы 18.1 (2009): 133–155.
- ^ Перейти обратно: а б Арвин, Фаршад и др. « Агрегация на основе сигналов с роем мобильных роботов: новый метод на основе нечетких данных ». Адаптивное поведение (2014). дои : 10.1177/1059712314528009 .
- ^ Воган, Ричард. « Массовое моделирование нескольких роботов на сцене ». Роевой интеллект 2.2–4 (2008): 189–208.
- ^ Пинчироли, Карло и др. « АРГоС: модульный многомоторный симулятор гетерогенной роевой робототехники ». 2011 Международная конференция IEEE/RSJ по интеллектуальным роботам и системам.
- ^ Арвин, Фаршад и др. « Разработка миниатюрного робота для применения в робототехнике Swarm ». Международный журнал компьютерной и электротехники 1.4 (2009): 436.
- ^ Гарнье, Саймон и др. « Воплощение поведения скопления тараканов в группе микророботов ». Искусственная жизнь 14.4 (2008): 387-408.
- ^ Озгюр, Айберк; Леменьян, Северен; Джохал, Смерть; Бельтран, Мария; Невеста, Манон; Перес, Лия; Мондада, Франческо; Дилленбург, Пьер (2017). "Клетка" . Материалы Международной конференции ACM/IEEE 2017 по взаимодействию человека и робота — HRI '17 . пп. 119–127. дои : 10.1145/2909824.3020247 . ISBN 9781450343367 . S2CID 2277067 .
- ^ Озгюр, Айберк (2018). Cellulo: материальные тактильные роевые роботы для обучения (доктор философии). ЭПФЛ. doi : 10.5075/epfl-thesis-8241 .
- ^ «Недорогие автономные роботы копируют поведение роения» . Новый Атлас. 22 сентября 2014 г. Проверено 4 января 2017 г.
- ^ Арвин, Фаршад и др. «Colias: автономный микроробот для роевых роботов». Международный журнал передовых робототехнических систем 11 (2014): 113.
- ^ На, С. и др. (2020) «Биологическая система искусственных феромонов для применения в роевой робототехнике», Адаптивное поведение. дои: 10.1177/1059712320918936.
- ^ Ху, Ченг и др. «Встроенная система технического зрения на основе биотехнологий для автономных микророботов: случай LGMD», IEEE Transactions on Cognitive and Developmental Systems, 2016.
- ^ Перейти обратно: а б "Капли" . Коррелл Лаборатория. 20 декабря 2012 года . Проверено 4 января 2017 г.
- ^ «Роботы размером с мячик для пинг-понга могут собираться вместе, образуя умную жидкость» . Популярная наука. 19 декабря 2012 года . Проверено 4 января 2017 г.
- ^ Солон, Оливия. «Рой крошечных роботов образует «мыслящую жидкость» (Wired UK)» . Проводная Великобритания. Архивировано из оригинала 31 декабря 2012 года . Проверено 4 января 2017 г.
{{cite web}}: CS1 maint: bot: исходный статус URL неизвестен ( ссылка ) - ^ «Капельки – Роевая робототехника» . Проверено 4 января 2017 г.
- ^ «Droplets: недорогая роевая робототехническая платформа для обучения и экспериментов | Robohub» . robohub.org . Проверено 30 мая 2018 г.
- ^ «электронная шайба» . Архивировано из оригинала 10 марта 2017 года . Проверено 7 января 2017 г.
- ^ Мондада, Франческо и др. «Электронная шайба, робот, предназначенный для инженерного образования». Материалы 9-й конференции по автономным робототехническим системам и конкурсам. Том. 1. № ЛИС-КОНФ-2009-004. IPCB: Политехнический институт Кастелу-Бранко, 2009.
- ^ «Swarmrobot Проект микророботов с открытым исходным кодом» . www.swarmrobot.org . Проверено 7 января 2017 г.
- ^ Кернбах, Серж и др. «Второе воплощение поведения скопления медоносных пчел в искусственной микроробототехнической системе». Адаптивное поведение 17.3 (2009): 237-259.
- ^ "акорнехо/килобот-лаборатории" . Гитхаб . Проверено 7 января 2017 г.
- ^ «Группа исследования самоорганизующихся систем» . www.eecs.harvard.edu . Архивировано из оригинала 26 октября 2014 года . Проверено 7 января 2017 г.
- ^ Рубинштейн, Майкл и др. «Килобот: недорогой робот с масштабируемыми операциями, предназначенный для коллективного поведения». Робототехника и автономные системы 62.7 (2014): 966-975.
- ^ Тургут, Али Э. и др. «Кобот: мобильный робот, созданный специально для исследований в области роевой робототехники». Ближневосточный технический университет, Анкара, Турция, METUCENG-TR Tech. Репутация 5 (2007)
- ^ Тургут, Али Э. и др. «Самоорганизованное скопление в стаях мобильных роботов». Роевой интеллект 2.2-4 (2008): 97-120.
- ^ «Робот Мона» . Проверено 8 марта 2017 г.
- ^ «Основные функции робота Mona и тестовый код в Arduino: MonaRobot/Mona-Platform» . Гитхаб . 2019-08-31.
- ^ Ф.Арвин, Дж. Эспиноза, Б. Берд, А. Уэст, С.Уотсон, Б.Леннокс Арвин, Фаршад; Эспиноза, Хосе; Берд, Бенджамин; Уэст, Эндрю; Уотсон, Саймон; Леннокс, Барри (2018). «Мона: доступный мобильный робот с открытым исходным кодом для образования и исследований» . Журнал интеллектуальных и робототехнических систем . 94 (3–4): 761–775. дои : 10.1007/s10846-018-0866-9 . S2CID 116022614 . , Журнал интеллектуальных и робототехнических систем, 2018 г.
- ^ Ф.Арвин, С.Уотсон, А.Э.Тургут, Дж. Эспиноза, Т.Крайник, Б.Леннокс «Вечный рой роботов: долгосрочная автономия мобильных роботов с использованием индуктивной зарядки на лету», Журнал интеллектуальных и робототехнических систем , 2017
- ^ «Лаборатория мультироботных систем - Университет Райса, Хьюстон, Техас» . mrsl.rice.edu . Архивировано из оригинала 29 мая 2014 года . Проверено 4 января 2017 г.
- ^ МакЛуркин, Джеймс и др. «Недорогая система из нескольких роботов для исследований, обучения и информационно-просветительской деятельности». Распределенные автономные робототехнические системы. Springer Berlin Heidelberg, 2013. 597–609.
- ^ Мондада, Франческо и др. «SWARM-BOT: новая концепция распределенной робототехники». Автономные роботы 17.2-3 (2004): 193-221.
- ^ «Спайдерино» . Проверено 27 июля 2020 г.
- ^ Дждид, Мидхат и др. « Паукино — недорогой робот для исследования стаи и образовательных целей ». На 13-м семинаре по интеллектуальным решениям во встроенных системах (WISES 2017), страницы 35–39, июль 2017 г.
- ^ МакЛуркин, Джеймс и др. « Разговор на языке роя: дизайн интерфейса человек-робот для больших групп автономных мобильных роботов. Архивировано 5 января 2017 г. в Wayback Machine ». Весенний симпозиум AAAI: Смело идти туда, куда раньше не ступала ни одна команда человека и робота. 2006.
- ^ Итани, Малек; Чен, Туочао; Ёсиока, Такуя; Голлакота, Шьямнатх (21 сентября 2023 г.). «Создание речевых зон с самораспространяющимися акустическими роями» . Природные коммуникации . 14 (1): 5684. Бибкод : 2023NatCo..14.5684I . дои : 10.1038/s41467-023-40869-8 . ISSN 2041-1723 . ПМЦ 10514314 . ПМИД 37735445 .
- ^ «Акустические роевые роботы» . Гитхаб . Проверено 22 сентября 2023 г.
- ^ «Создание речевых зон с использованием самораспространяющихся акустических роев» . acusticswarm.cs.washington.edu . Проверено 22 сентября 2023 г.

