Криволинейные координаты
В геометрии , криволинейные координаты — это система координат евклидова пространства в которой координатные линии могут быть изогнуты. Эти координаты могут быть получены из набора декартовых координат с помощью преобразования, которое является локально обратимым (отображение «один к одному») в каждой точке. Это означает, что можно преобразовать точку, заданную в декартовой системе координат, в ее криволинейные координаты и обратно. Название «криволинейные координаты» , придуманное французским математиком Ламе , происходит от того факта, что координатные поверхности криволинейных систем искривлены.
Известные примеры криволинейных систем координат в трехмерном евклидовом пространстве ( R 3 ) — цилиндрическая и сферическая координаты. Декартова координатная поверхность в этом пространстве является координатной плоскостью ; например, z = 0 определяет плоскость x - y . В том же пространстве координатная поверхность r = 1 в сферических координатах является поверхностью единичной сферы , которая искривлена. Формализм криволинейных координат обеспечивает единое и общее описание стандартных систем координат.
Криволинейные координаты часто используются для определения местоположения или распределения физических величин, которые могут быть, например, скалярами , векторами или тензорами . Математические выражения, включающие эти величины в векторном исчислении и тензорном анализе (такие как градиент , дивергенция , ротор и лапласиан ), можно преобразовать из одной системы координат в другую в соответствии с правилами преобразования скаляров, векторов и тензоров. Тогда такие выражения становятся справедливыми для любой криволинейной системы координат.
Для некоторых приложений криволинейную систему координат может быть проще использовать, чем декартову систему координат. Движение частиц под действием центральных сил обычно легче решить в сферических координатах, чем в декартовых координатах; это справедливо для многих физических задач со сферической симметрией, определенной в R 3 . Уравнения с граничными условиями , которые соответствуют координатным поверхностям для конкретной криволинейной системы координат, может быть проще решать в этой системе. Хотя движение частицы в прямоугольном ящике можно описать с помощью декартовых координат, движение в сфере легче описать с помощью сферических координат. Сферические координаты являются наиболее распространенными криволинейными системами координат и используются в науках о Земле , картографии , квантовой механике , теории относительности и технике .
Ортогональные криволинейные координаты в трех измерениях
[ редактировать ]Координаты, базис и векторы
[ редактировать ]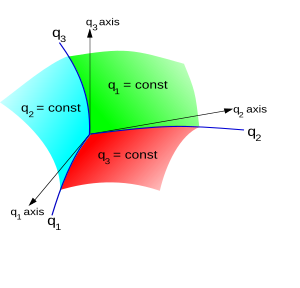

А пока рассмотрим трехмерное пространство . Точка P в трехмерном пространстве (или ее вектор положения r ) может быть определена с использованием декартовых координат ( x , y , z ) [эквивалентно записанных ( x 1 , х 2 , х 3 )], к , где e x , e y , e z — стандартные базисные векторы .

Его также можно определить по криволинейным координатам ( q 1 , q 2 , q 3 ), если эта тройка чисел однозначно определяет одну точку. Тогда связь между координатами задается обратимыми функциями преобразования:


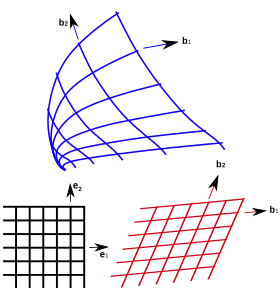
Поверхности q 1 = константа, q 2 = константа, q 3 = константы называются координатными поверхностями ; а пространственные кривые, образованные их попарным пересечением, называются координатными кривыми . Координатные оси определяются касательными к координатным кривым на пересечении трех поверхностей. В общем, они не являются фиксированными направлениями в пространстве, как это бывает в случае простых декартовых координат, и поэтому обычно не существует естественной глобальной основы для криволинейных координат.
В декартовой системе стандартные базисные векторы можно получить из производной положения точки P по локальной координате.

Применение тех же производных к криволинейной системе локально в точке P определяет естественные базисные векторы:

Такой базис, векторы которого меняют свое направление и/или величину от точки к точке, называется локальным базисом . Все базы, связанные с криволинейными координатами, обязательно локальны. Базисные векторы, одинаковые во всех точках, являются глобальными базисами и могут быть связаны только с линейными или аффинными системами координат .
В этой статье e зарезервировано для стандартной основы (декартовой), а h или b — для криволинейной основы.
Они могут не иметь единичной длины, а также не быть ортогональными. В случае, если они ортогональны во всех точках, где производные четко определены, мы определяем коэффициенты Ламе (по Габриэлю Ламе ) по формуле

и криволинейные ортонормированные базисные векторы на

Эти базисные векторы вполне могут зависеть от положения P ; поэтому необходимо, чтобы они не считались постоянными в регионе. (Они технически составляют основу расслоения касательного в P и поэтому локальны для P .)

В общем, криволинейные координаты допускают, что естественные базисные векторы h i не все взаимно перпендикулярны друг другу и не обязательно должны иметь единичную длину: они могут иметь произвольную величину и направление. Использование ортогонального базиса упрощает векторные манипуляции, чем неортогональные. Однако некоторые области физики и техники , особенно механика жидкости и механика сплошной среды , требуют неортогональных оснований для описания деформаций и переноса жидкости, чтобы учитывать сложные зависимости физических величин от направления. Обсуждение общего случая появится позже на этой странице.
Векторное исчисление
[ редактировать ]Дифференциальные элементы
[ редактировать ]В ортогональных криволинейных координатах, поскольку полное дифференциальное изменение r равно

поэтому масштабные коэффициенты

В неортогональных координатах длина положительный квадратный корень из (с соглашением Эйнштейна о суммировании ). Шесть независимых скалярных произведений g ij знак равно час i . h j естественных базисных векторов обобщают три масштабных коэффициента, определенные выше для ортогональных координат. Девять g ij являются компонентами метрического тензора , который имеет только три ненулевых компонента в ортогональных координатах: g 11 = h 1 h 1 , g 22 = h 2 h 2 , g 33 = h 3 h 3 .


Ковариантные и контравариантные базы
[ редактировать ]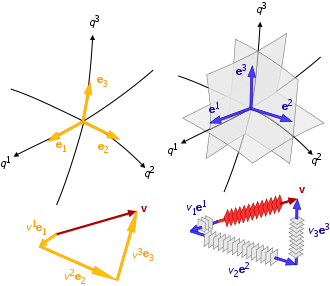
Пространственные градиенты, расстояния, производные по времени и масштабные коэффициенты взаимосвязаны в системе координат двумя группами базисных векторов:
- базисные векторы, которые локально касаются связанной с ними координатной линии: – контравариантные векторы (обозначены пониженными индексами), а
- базисные векторы, локально нормальные к изоповерхности, созданной другими координатами: — ковариантные векторы (обозначаются приподнятыми индексами), ∇ — del оператор .


Обратите внимание, что из-за соглашения Эйнштейна о суммировании положение индексов векторов противоположно положению координат.
Следовательно, общая криволинейная система координат имеет два набора базисных векторов для каждой точки: { b 1 , b 2 , b 3 } — контравариантный базис, а { b 1 , б 2 , б 3 } — ковариантный (т.е. взаимный) базис. Типы ковариантных и контравариантных базисных векторов имеют одинаковое направление для ортогональных криволинейных систем координат, но, как обычно, имеют инвертированные единицы относительно друг друга.
Обратите внимание на следующее важное равенство: где обозначает обобщенную дельту Кронекера .


В декартовой системе координат , мы можем записать скалярное произведение как:


Рассмотрим бесконечно малое перемещение . Пусть dq 1 , dq 2 и dq 3 обозначают соответствующие бесконечно малые изменения криволинейных координат q 1 , q 2 и q 3 соответственно.

По правилу цепочки dq 1 можно выразить как:

Если смещение d r таково, что dq 2 = dq 3 = 0, т.е. вектор положения r перемещается на бесконечно малую величину вдоль координатных осей q 2 =const и q 3 =const, то:

Деля на dq 1 и переходя к пределу dq 1 → 0:

или эквивалентно:

Теперь, если смещение d r таково, что dq 1 = dq 3 =0, т.е. вектор положения r перемещается на бесконечно малую величину вдоль координатных осей q 1 =const и q 3 =const, тогда:

Деля на dq 2 и переходя к пределу dq 2 → 0:

или эквивалентно:

И так далее для других скалярных произведений.
Альтернативное доказательство:

и соглашение Эйнштейна о суммировании подразумевается .
Вектор v может быть задан в терминах любого базиса, т. е.

Используя соглашение Эйнштейна о суммировании, базисные векторы относятся к компонентам следующим образом: [2] : 30–32


и


где g — метрический тензор (см. ниже).
Вектор может быть задан с помощью ковариантных координат (пониженные индексы, записанные v k ) или контравариантных координат (повышенные индексы, записанные v к ). Из приведенных выше векторных сумм видно, что контравариантные координаты связаны с ковариантными базисными векторами, а ковариантные координаты связаны с контравариантными базисными векторами.
Ключевой особенностью представления векторов и тензоров в терминах индексированных компонентов и базисных векторов является инвариантность в том смысле, что векторные компоненты, которые преобразуются ковариантным (или контравариантным) образом, соединяются с базисными векторами, которые преобразуются контравариантным образом (или ковариантный способ).
Интеграция
[ редактировать ]Построение ковариантного базиса в одном измерении
[ редактировать ]Рассмотрим одномерную кривую, изображенную на рис. 3. В точке P , принятой за начало координат , x — одна из декартовых координат, а q 1 – одна из криволинейных координат. Локальный (неединичный) базисный вектор — b 1 (обозначен выше как h 1 , где b зарезервирован для единичных векторов), и он построен на основе q 1 которая является касательной к этой координатной линии в точке P. ось , Ось q 1 и, таким образом, вектор b 1 образует угол с декартовой осью x и декартовым базисным вектором e 1 .

видно, Из треугольника PAB что

где | е 1 |, | б 1 | являются величинами двух базисных векторов, т. е. скалярных пересечений PB и PA . PA также является проекцией b 1 на ось x .
Однако этот метод преобразований базисных векторов с использованием направленных косинусов неприменим к криволинейным координатам по следующим причинам:
- При увеличении расстояния от P угол между кривой q 1 и декартова ось x все больше отклоняется от .
- На расстоянии PB истинный угол равен тому, который образует касательная в точке C с осью x , причем последний угол явно отличается от .
Углы, под которыми q 1 линия, и эта форма оси с осью x становится ближе по значению, чем ближе она приближается к точке , и становится точно равной в точке P. P
Пусть точка E расположена очень близко к P , настолько близко, что расстояние PE бесконечно мало. Затем PE, измеренное на q 1 совпадает с q измеренным на ось практически 1 линия. При этом отношение PD/PE ( PD — проекция PE на ось x ) становится практически точно равным .

Пусть бесконечно малые точки пересечения PD и PE обозначены соответственно как dx и d q 1 . Затем
- .

Таким образом, направленные косинусы могут быть заменены в преобразованиях более точными соотношениями между бесконечно малыми координатными точками. Отсюда следует, что компонента (проекция) b 1 на ось x равна
- .

Если д я = q я ( Икс 1 , Икс 2 , Икс 3 ) и Икс я знак равно Икс я ( q 1 , q 2 , q 3 ) — гладкие (непрерывно дифференцируемые) функции, коэффициенты преобразования можно записать в виде и . То есть эти отношения являются частными производными координат, принадлежащих одной системе, по координатам, принадлежащим другой системе.


Построение ковариантного базиса в трёх измерениях
[ редактировать ]Проделав то же самое для координат в двух других измерениях, b 1 можно выразить как:

Аналогичные уравнения справедливы для b 2 и b 3 , так что стандартный базис { e 1 , e 2 , e 3 } преобразуется в локальный (упорядоченный и нормализованный ) базис { b 1 , b 2 , b 3 } с помощью следующей системы уравнения:

Аналогичными рассуждениями можно получить обратное преобразование локального базиса в стандартный:

Якобиан трансформации
[ редактировать ]Вышеупомянутые системы линейных уравнений можно записать в матричной форме, используя соглашение Эйнштейна о суммировании, как
- .

Эта матрица коэффициентов линейной системы является матрицей Якобиана (и обратной ей) преобразования. Это уравнения, которые можно использовать для преобразования декартова базиса в криволинейный и наоборот.
В трех измерениях расширенные формы этих матриц имеют вид

В обратном преобразовании (вторая система уравнений) неизвестными являются криволинейные базисные векторы. Для любого конкретного местоположения может существовать только один и только один набор базисных векторов (иначе базис в этой точке не определен четко). Это условие выполняется тогда и только тогда, когда система уравнений имеет единственное решение. В линейной алгебре система линейных уравнений имеет единственное решение (нетривиальное), только если определитель ее системной матрицы не равен нулю:

что показывает обоснование вышеуказанного требования относительно обратного определителя Якобиана.
Обобщение до n измерений
[ редактировать ]Этот формализм распространяется на любое конечное измерение следующим образом.
Рассмотрим реальное евклидово n -мерное пространство, то есть R н = R × R × ... × R ( n раз), где R — набор действительных чисел , а × обозначает декартово произведение , которое является векторным пространством .
Координаты , этого пространства можно обозначить: x = ( x 1 ) x 2 ,..., n x . Поскольку это вектор (элемент векторного пространства), его можно записать как:

где е 1 = (1,0,0...,0), и 2 = (0,1,0...,0) и 3 = (0,0,1...,0),..., и н = (0,0,0...,1) — стандартный базис векторов пространства R н , а i = 1, 2,... n — индекс маркировки компонентов. Каждый вектор имеет ровно один компонент в каждом измерении (или «оси»), они взаимно ортогональны ( перпендикулярны ) и нормализованы (имеют единичную величину ).
В более общем смысле мы можем определить базисные векторы b i так, чтобы они зависели от q = ( q 1 , q 2 ,..., q n ), т.е. они меняются от точки к точке: b i = b i ( q ). В этом случае определить одну и ту же точку x в терминах этого альтернативного базиса: координаты относительно этого базиса v i также обязательно зависят и от x , то есть v i = v i ( x ). Тогда вектор v в этом пространстве относительно этих альтернативных координат и базисных векторов можно разложить как линейную комбинацию в этом базисе (что просто означает умножение каждого базисного вектора e i на число vi – ) скалярное умножение :

Векторная сумма, описывающая v в новом базисе, состоит из разных векторов, хотя сама сумма остается прежней.
Преобразование координат
[ редактировать ]С более общей и абстрактной точки зрения, криволинейная система координат — это просто участок координат на дифференцируемом многообразии E. н (n-мерное евклидово пространство которое диффеоморфно декартову ) , координатному участку на многообразии. [3] Два диффеоморфных координатных участка на дифференциальном многообразии не обязательно должны дифференцированно перекрываться. При таком простом определении криволинейной системы координат все последующие результаты представляют собой просто приложения стандартных теорем дифференциальной топологии .
Функции преобразования таковы, что между точками в «старых» и «новых» координатах существует взаимно-однозначное отношение, то есть эти функции являются биекциями и удовлетворяют следующим требованиям в своих областях :
- Это гладкие функции : q я = q я ( х )
- Обратный Якобиана определитель

Векторная и тензорная алгебра в трехмерных криволинейных координатах
[ редактировать ]Элементарная векторная и тензорная алгебра в криволинейных координатах используется в некоторых старых научных публикациях по механике и физике и может быть незаменима для понимания работ начала и середины 1900-х годов, например текста Грина и Зерны. [5] В этом разделе приведены некоторые полезные соотношения алгебры векторов и тензоров второго порядка в криволинейных координатах. Обозначения и содержание в основном взяты из Огдена, [6] Нагди, [7] Симмондс, [2] Грин и Зерна, [5] Басар и Вейхерт, [8] и Сиарлет. [9]
Тензоры в криволинейных координатах
[ редактировать ]Тензор второго порядка можно выразить как

где обозначает тензорное произведение . Компоненты S ij называются контравариантными компонентами, S я j смешанные правоковариантные компоненты, S i дж смешанные левоковариантные и Sij компоненты ковариантные компоненты тензора второго порядка. Компоненты тензора второго порядка связаны соотношением


Метрический тензор в ортогональных криволинейных координатах
[ редактировать ]В каждой точке можно построить небольшой элемент линии d x , поэтому квадрат длины элемента линии является скалярным произведением d • d x и называется метрикой пространства x , определяемой формулой:
- .

Следующая часть приведенного выше уравнения

— симметричный тензор, называемый фундаментальным (или метрическим) тензором евклидова пространства в криволинейных координатах.
Индексы можно повышать и понижать по метрике:

Связь с коэффициентами Ламе
[ редактировать ]Определение масштабных коэффициентов h i с помощью

дает связь между метрическим тензором и коэффициентами Ламе, а

где h ij — коэффициенты Ламе. Для ортогонального базиса мы также имеем:

Пример: полярные координаты
[ редактировать ]Если мы рассмотрим полярные координаты для R 2 ,

(r, θ) — криволинейные координаты, а определитель Якобиана преобразования ( r , θ) → ( r cos θ, r sin θ) равен r .
Ортогональные . базисные векторы: b r = (cos θ, sin θ), b θ = (−r sin θ, r cos θ) Масштабные коэффициенты: h r = 1 и h θ = r . Фундаментальный тензор g 11 =1, g 22 = r 2 , г 12 = г 21 =0.
Переменный тензор
[ редактировать ]В ортонормированном правостороннем базисе знакопеременный тензор третьего порядка определяется как

В общем криволинейном базисе тот же тензор можно выразить как

Также можно показать, что

Символы Кристофера
[ редактировать ]- Символы Кристоффеля первого рода.


где запятая обозначает частную производную (см. исчисление Риччи ). Чтобы выразить Γ kij через g ij ,

С

использование их для перестановки вышеуказанных отношений дает
![{\displaystyle \Gamma _{kij}={\frac {1}{2}}(g_{ik,j}+g_{jk,i}-g_{ij,k})={\frac {1} 2}}[(\mathbf {b}_{i}\cdot \mathbf {b}_{k})_{,j}+(\mathbf {b}_{j}\cdot \mathbf {b}_ {k})_{,i}-(\mathbf {b}_{i}\cdot \mathbf {b}_{j})_{,k}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5374e9beb07a8c7ab470909bb5d24b4bfb1f32c6)
- Символы Кристоффеля второго рода.


Это означает, что
- с .


Другие следующие отношения:

Векторные операции
[ редактировать ]- Скалярное произведение :
Скалярное произведение двух векторов в криволинейных координатах равно [2] : 32
- Перекрестное произведение :
Перекрестное произведение двух векторов определяется выражением [2] : 32–34
где является символом перестановки и является декартовым базисным вектором. В криволинейных координатах эквивалентное выражение имеет вид




![{\displaystyle \mathbf {u} \times \mathbf {v} = [(\mathbf {b} _ {m} \ times \mathbf {b} _ {n}) \cdot \ mathbf {b} _ {s} ]u^{m}v^{n}\mathbf {b} ^{s}={\mathcal {E}}_{smn}u^{m}v^{n}\mathbf {b} ^{s }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fbed721be25f93b6f46d2152fcadb59c91738f2)

Векторное и тензорное исчисление в трехмерных криволинейных координатах
[ редактировать ]Необходимо внести коррективы в расчет линейных , поверхностных и объемных интегралов . Для простоты следующее ограничивается тремя измерениями и ортогональными криволинейными координатами. Однако те же аргументы применимы и к n -мерным пространствам. Когда система координат неортогональна, в выражениях присутствуют дополнительные члены.
Симмондс, [2] в своей книге по тензорному анализу цитирует Альберта Эйнштейна высказывание [10]
Магия этой теории вряд ли не сможет не очаровать любого, кто по-настоящему ее понял; он представляет собой подлинный триумф метода абсолютного дифференциального исчисления, основанного Гауссом, Риманом, Риччи и Леви-Чивитой.
Векторное и тензорное исчисление в общих криволинейных координатах используется в тензорном анализе на четырехмерных криволинейных многообразиях в общей теории относительности . [11] в механике изогнутых снарядов , [9] при исследовании инвариантности свойств уравнений Максвелла , которые представляли интерес для метаматериалов. [12] [13] и во многих других областях.
В этом разделе приведены некоторые полезные соотношения при исчислении векторов и тензоров второго порядка в криволинейных координатах. Обозначения и содержание в основном взяты из Огдена, [14] Симмондс, [2] Грин и Зерна, [5] Басар и Вейхерт, [8] и Сиарлет. [9]
Пусть φ = φ( x ) — корректно определенное скалярное поле, v = v ( x ) — корректно определенное векторное поле, а λ 1 , λ 2 ... — параметры координат
Геометрические элементы
[ редактировать ]- Касательный вектор : если x ( λ ) параметризует кривую C в декартовых координатах, то
— касательный вектор к C в криволинейных координатах (с использованием цепного правила ). Используя определение коэффициентов Ламе и определение метрики g ij = 0, когда i ≠ j , величина равна:
- касательной плоскости Элемент : Если x ( λ 1 , λ 2 ) параметризует поверхность S в декартовых координатах, то следующее векторное произведение касательных векторов является вектором нормали к S с величиной бесконечно малого элемента плоскости в криволинейных координатах. Используя приведенный выше результат,
где является символом перестановки . В детерминантной форме:





Интеграция
[ редактировать ]Оператор Скалярное поле Векторное поле Линейный интеграл Поверхностный интеграл Интеграл объема






Дифференциация
[ редактировать ]Выражения для градиента, дивергенции и лапласиана можно напрямую распространить на n -мерности, однако ротор определяется только в 3D.
Векторное поле b i касается q я координатной кривой и образует естественный базис в каждой точке кривой. Этот базис, как обсуждалось в начале этой статьи, также называется ковариантным криволинейным базисом. Мы также можем определить взаимный базис или контравариантный криволинейный базис b я . Все алгебраические отношения между базисными векторами, обсуждаемые в разделе о тензорной алгебре, применимы к естественному базису и обратному ему элементу в каждой точке x .
Оператор Скалярное поле Векторное поле Тензорное поле 2-го порядка Градиент Дивергенция Н/Д где a — произвольный постоянный вектор.В криволинейных координатах
лапласиан (Первое равенство только в 3D; второе равенство только в декартовых компонентах)
Завиток Н/Д Только для векторных полей в 3D: где является символом Леви-Чивита .
См. Скручивание тензорного поля.





![{\displaystyle {\boldsymbol {\nabla }}\cdot {\boldsymbol {S}}=\left[{\cfrac {\partial S_{ij}}{\partial q^{k}}}-\Gamma _{ ki}^{l}S_{lj}-\Gamma _{kj}^{l}S_{il}\right]g^{ik}\mathbf {b} ^{j}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29341d34c22cd20f86306c169ffd44a8108cc65e)




Фиктивные силы в общих криволинейных координатах
[ редактировать ]По определению, если частица, на которую не действуют силы, имеет свое положение, выраженное в инерциальной системе координат ( x 1 , x 2 , x 3 , t ), то там она не будет иметь ускорения (d 2 х j /d т 2 = 0). [15] В этом контексте система координат может не быть «инерциальной» либо из-за непрямой оси времени, либо из-за непрямости пространственных осей (или того и другого). Другими словами, базисные векторы координат могут меняться во времени в фиксированных положениях, или они могут меняться в зависимости от положения в фиксированные моменты времени, или и то, и другое. Когда уравнения движения выражаются через любую неинерциальную систему координат (в этом смысле), появляются дополнительные члены, называемые символами Кристоффеля. Строго говоря, эти члены представляют собой компоненты абсолютного ускорения (в классической механике), но мы также можем продолжать рассматривать d 2 х j /d т 2 как ускорение (как если бы координаты были инерциальными) и рассматривать дополнительные члены как если бы они были силами, и в этом случае они называются фиктивными силами. [16] Компонент любой такой фиктивной силы, перпендикулярной траектории частицы и лежащей в плоскости кривизны траектории, тогда называется центробежной силой . [17]
Этот более общий контекст проясняет соответствие между понятиями центробежной силы во вращающихся системах координат и в стационарных криволинейных системах координат. (Оба эти понятия часто встречаются в литературе. [18] [19] [20] ) В качестве простого примера рассмотрим частицу массы m, движущуюся по окружности радиуса r с угловой скоростью w относительно системы полярных координат, вращающейся с угловой скоростью W . Радиальное уравнение движения: mr ” = F r + mr ( w + W ) 2 . Таким образом, центробежная сила равна mr , умноженному на квадрат абсолютной скорости вращения A = w + W частицы. Если мы выберем систему координат, вращающуюся со скоростью частицы, то W = A и w = 0, и в этом случае центробежная сила равна mrA. 2 , тогда как если мы выберем стационарную систему координат, мы имеем W = 0 и w = A , и в этом случае центробежная сила снова равна mrA 2 . Причина такого равенства результатов состоит в том, что в обоих случаях базисные векторы в месте нахождения частицы изменяются во времени совершенно одинаково. Следовательно, на самом деле это просто два разных способа описания одного и того же объекта: один из них дается в терминах вращающихся координат, а другой — в терминах стационарных криволинейных координат, оба из которых неинерциальны в соответствии с более абстрактным значением этого термина. .
При описании общего движения действительные силы, действующие на частицу, часто относят к мгновенной соприкасающейся окружности, касательной к траектории движения, причем эта окружность в общем случае не центрирована в фиксированном месте, поэтому происходит разложение на центробежную и кориолисову. компоненты постоянно меняются. Это верно независимо от того, описывается ли движение в стационарных или вращающихся координатах.
См. также
[ редактировать ]- Ковариантность и контравариантность
- Введение в математику общей теории относительности
- Особые случаи:
- Тензоры в криволинейных координатах
- Формулы Френе – Серре
- Ковариантная производная
- Тензорная производная (механика сплошных сред)
- Криволинейная перспектива
- Del в цилиндрических и сферических координатах
Ссылки
[ редактировать ]- ^ Дж. А. Уилер; К. Миснер; К. С. Торн (1973). Гравитация . WH Freeman & Co. ISBN 0-7167-0344-0 .
- ^ Jump up to: а б с д и ж Симмондс, Дж. Г. (1994). Кратко о тензорном анализе . Спрингер. ISBN 0-387-90639-8 .
- ^ Бутби, WM (2002). Введение в дифференциальные многообразия и риманову геометрию (переработанное издание). Нью-Йорк, штат Нью-Йорк: Academic Press.
- ^ МакКоннелл, Эй Джей (1957). Применение тензорного анализа . Нью-Йорк, штат Нью-Йорк: Dover Publications, Inc. Ch. 9, сек. 1. ISBN 0-486-60373-3 .
- ^ Jump up to: а б с Грин, А.Е.; Зерна, В. (1968). Теоретическая эластичность . Издательство Оксфордского университета. ISBN 0-19-853486-8 .
- ^ Огден, RW (2000). Нелинейные упругие деформации . Дувр.
- ^ Нагди, премьер-министр (1972). «Теория оболочек и пластин». В С. Флюгге (ред.). Справочник по физике . Том. ВИа/2. стр. 425–640.
- ^ Jump up to: а б Басар, Ю.; Вейхерт, Д. (2000). Численная механика сплошных сред твердого тела: фундаментальные понятия и перспективы . Спрингер.
- ^ Jump up to: а б с Сиарлет, PG (2000). Теория оболочек . Том. 1. Эльзевир Наука.
- ^ Эйнштейн, А. (1915). «Вклад в общую теорию относительности». В Лачосе, К. (ред.). Десятилетие Эйнштейна . п. 213. ИСБН 0-521-38105-3 .
- ^ Миснер, CW; Торн, Канзас; Уилер, Дж. А. (1973). Гравитация . WH Freeman and Co. ISBN 0-7167-0344-0 .
- ^ Гринлиф, А.; Лассас, М.; Ульманн, Г. (2003). «Анизотропная проводимость, которую невозможно обнаружить с помощью EIT». Физиологическое измерение . 24 (2): 413–419. дои : 10.1088/0967-3334/24/2/353 . ПМИД 12812426 .
- ^ Леонхардт, Ю.; Филбин, Т.Г. (2006). «Общая теория относительности в электротехнике». Новый журнал физики . 8 (10): 247. arXiv : cond-mat/0607418 . дои : 10.1088/1367-2630/8/10/247 .
- ^ Огден
- ^ Фридман, Майкл (1989). Основы теорий пространства-времени . Издательство Принстонского университета. ISBN 0-691-07239-6 .
- ^ Стоммел, Генри М.; Мур, Деннис В. (1989). Введение в силу Кориолиса . Издательство Колумбийского университета. ISBN 0-231-06636-8 .
- ^ Пиво; Джонстон (1972). Статика и динамика (2-е изд.). МакГроу-Хилл. п. 485. ИСБН 0-07-736650-6 .
- ^ Хильдебранд, Фрэнсис Б. (1992). Методы прикладной математики . Дувр. п. 156 . ISBN 0-13-579201-0 .
- ^ МакКуорри, Дональд Аллан (2000). Статистическая механика . Университетские научные книги. ISBN 0-06-044366-9 .
- ^ Вебер, Ханс-Юрген; Арфкен, Джордж Браун (2004). Основные математические методы для физиков . Академическая пресса. п. 843. ИСБН 0-12-059877-9 .
Дальнейшее чтение
[ редактировать ]- Шпигель, MR (1959). Векторный анализ . Нью-Йорк: Серия набросков Шаума. ISBN 0-07-084378-3 .
- Арфкен, Джордж (1995). Математические методы для физиков . Академическая пресса. ISBN 0-12-059877-9 .
Внешние ссылки
[ редактировать ]- Planetmath.org Вывод единичных векторов в криволинейных координатах
- Страница MathWorld о криволинейных координатах
- Электронная книга профессора Р. Брэннона по криволинейным координатам
- Викиверситет:Введение в эластичность/тензоры#Дивергенция тензорного поля – Викиверситет , Введение в эластичность/тензоры.
| Базы данных органов управления : Национальные |
|---|