Декартова система координат

В геометрии декартова система координат ( Великобритания : / k ɑːr ˈ t iː zj n ə / , США : / k ɑːr ˈ t iː ʒ ə n / ) на плоскости — это система координат , которая однозначно определяет каждую точку парой действительных чисел, называемых координатами , которые представляют собой расстояния со знаком до точки от двух фиксированных перпендикулярно ориентированных линий, называемых координатные линии , координатные оси или просто оси (множественное число от оси ) системы. Точка, где они встречаются, называется началом координат и имеет (0, 0) координаты .
Точно так же положение любой точки в трехмерном пространстве может быть задано тремя декартовыми координатами , которые представляют собой расстояния со знаком от точки до трех взаимно перпендикулярных плоскостей. В более общем смысле, n декартовых координат определяют точку в n -мерном евклидовом пространстве для любого измерения n . Эти координаты представляют собой знаковые расстояния от точки до n взаимно перпендикулярных неподвижных гиперплоскостей .
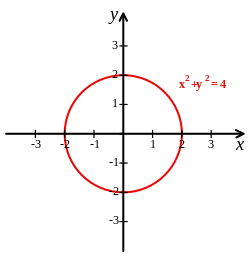
Декартовы координаты названы в честь Рене Декарта , изобретение которого в 17 веке произвело революцию в математике, позволив выражать проблемы геометрии в терминах алгебры и исчисления . Используя декартову систему координат, геометрические фигуры (например, кривые ) можно описать уравнениями, включающими координаты точек формы. Например, круг радиуса 2 с центром в начале плоскости можно описать как набор всех точек, координаты x и y которых удовлетворяют уравнению x. 2 + и 2 = 4 ; площадь . , периметр и касательную линию в любой точке можно вычислить из этого уравнения с помощью интегралов и производных таким образом, чтобы его можно было применить к любой кривой
Декартовы координаты являются основой аналитической геометрии и обеспечивают поучительные геометрические интерпретации для многих других разделов математики, таких как линейная алгебра , комплексный анализ , дифференциальная геометрия , многомерное исчисление , теория групп и многое другое. Знакомый пример — понятие графика функции . Декартовы координаты также являются важными инструментами для большинства прикладных дисциплин, связанных с геометрией, включая астрономию , физику , инженерное дело и многие другие. Это наиболее распространенная система координат, используемая в компьютерной графике , компьютерном геометрическом проектировании и другой обработке данных, связанных с геометрией .
История
[ редактировать ]Прилагательное «картезианский» относится к французскому математику и философу Рене Декарту , который опубликовал эту идею в 1637 году, когда он жил в Нидерландах . Его независимо открыл Пьер де Ферма , который также работал в трех измерениях, хотя Ферма не опубликовал свое открытие. [1] Французский священнослужитель Николь Орем использовал конструкции, подобные декартовым координатам, задолго до времен Декарта и Ферма. [2]
И Декарт, и Ферма использовали в своих исследованиях одну ось и имели переменную длину, измеряемую относительно этой оси. [3] Концепция использования пары топоров была введена позже, после того как «Геометрия » Декарта была переведена на латынь в 1649 году Франсом ван Скутеном и его учениками. Эти комментаторы ввели несколько концепций, пытаясь прояснить идеи, содержащиеся в работах Декарта. [4]
Развитие декартовой системы координат сыграло бы фундаментальную роль в развитии исчисления Исаака Ньютона и Готфрида Вильгельма Лейбница . [5] Двухкоординатное описание плоскости позднее было обобщено в понятие векторных пространств . [6]
Со времен Декарта были разработаны многие другие системы координат, такие как полярные координаты плоскости, а также сферические и цилиндрические координаты трехмерного пространства.
Описание
[ редактировать ]Одно измерение
[ редактировать ]Аффинная линия с выбранной декартовой системой координат называется числовой прямой . Каждая точка на линии имеет координату в виде действительного числа, и каждое действительное число представляет некоторую точку на линии.
Существует две степени свободы в выборе декартовой системы координат для линии, которую можно указать, выбрав две различные точки вдоль линии и присвоив им два различных действительных числа (чаще всего ноль и единицу). Другим точкам затем можно однозначно присвоить числа посредством линейной интерполяции . Эквивалентно, одной точке может быть присвоено определенное действительное число, например, исходная точка, соответствующая нулю, а ориентированная длина вдоль линии может быть выбрана в качестве единицы, при этом ориентация указывает на соответствие между направлениями вдоль линии и положительным или положительным или отрицательные числа. [7] Каждая точка соответствует расстоянию со знаком от начала координат (число с абсолютным значением, равным расстоянию, и знаком + или – , выбранным в зависимости от направления).
Геометрическое преобразование линии может быть представлено функцией действительной переменной , например, сдвиг линии соответствует сложению, а масштабирование линии соответствует умножению. Любые две декартовы системы координат на прямой могут быть связаны друг с другом линейной функцией (функцией вида ) перевод координаты конкретной точки в одной системе в ее координату в другой системе. Выбор системы координат для каждой из двух разных линий устанавливает аффинное отображение одной линии в другую, перенося каждую точку одной линии в точку другой линии с той же координатой.

Два измерения
[ редактировать ]Декартова система координат в двух измерениях (также называемая прямоугольной системой координат или ортогональной системой координат). [8] ) определяется упорядоченной парой линий перпендикулярных (осей), одной единицей длины для обеих осей и ориентацией для каждой оси. Точка пересечения осей принимается за начало координат для обеих, превращая таким образом каждую ось в числовую прямую. Для любой точки P проводится линия, через P перпендикулярная каждой оси, и положение, где она пересекает ось, интерпретируется как число. в выбранном порядке являются декартовыми координатами P Два числа . Обратная конструкция позволяет определить точку P по ее координатам.
называются абсциссой и ординатой P соответственно Первая и вторая координаты ; а точка пересечения осей называется началом системы координат. Координаты обычно записываются в виде двух чисел в круглых скобках в указанном порядке, разделенных запятой, как в (3, −10,5) . Таким образом, начало координат имеет координаты (0, 0) , а точки на положительных полуосях, находящихся на расстоянии одной единицы от начала координат, имеют координаты (1, 0) и (0, 1) .
В математике, физике и технике первая ось обычно определяется или изображается горизонтальной и ориентированной вправо, а вторая ось — вертикальной и ориентированной вверх. (Однако в некоторых контекстах компьютерной графики ось ординат может быть ориентирована вниз.) Начало координат часто обозначается O , а две координаты часто обозначаются буквами X и Y или x и y . Затем оси могут называться осью X и Y. осью Выбор букв основан на первоначальном соглашении, согласно которому последняя часть алфавита используется для обозначения неизвестных значений. Первая часть алфавита использовалась для обозначения известных значений.
с Евклидова плоскость выбранной декартовой системой координат называется Декартова плоскость . В декартовой плоскости можно определить канонические представители определенных геометрических фигур, таких как единичный круг (с радиусом, равным единице длины, и центром в начале координат), единичный квадрат (диагональ которого имеет конечные точки в (0, 0) и (1, 1) ), единичная гипербола и так далее.
Две оси делят плоскость на четыре прямых угла , называемых квадрантами . Квадранты могут быть названы или пронумерованы по-разному, но квадрант, в котором все координаты положительны, обычно называется первым квадрантом .
Если координаты точки ( x , y ) , то ее расстояния от осей X и от осей Y равны | й | и | х | соответственно; где | · | обозначает абсолютное значение числа.
Три измерения
[ редактировать ]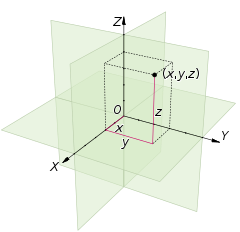
Декартова система координат трехмерного пространства состоит из упорядоченной тройки линий ( осей ), которые проходят через общую точку ( начало координат ) и попарно перпендикулярны; ориентация каждой оси; и единая единица длины для всех трех осей. Как и в двумерном случае, каждая ось становится числовой прямой. Для любой точки P пространства рассматривается гиперплоскость, проходящая через P, перпендикулярная каждой оси координат, и интерпретируется точка, в которой эта гиперплоскость пересекает ось, как число. Декартовы координаты P — это эти три числа в выбранном порядке. Обратная конструкция определяет точку P по трем ее координатам.
Альтернативно, каждая координата точки P может быть принята как расстояние от P до гиперплоскости, определяемой двумя другими осями, со знаком, определяемым ориентацией соответствующей оси.
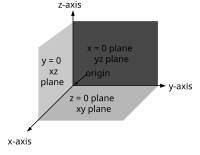
Каждая пара осей определяет координатную гиперплоскость . Эти гиперплоскости делят пространство на восемь октантов . Октанты:

Координаты обычно записываются в виде трех чисел (или алгебраических формул), заключенных в круглые скобки и разделенных запятыми, как в (3, −2,5, 1) или ( t , u + v , π /2) . Таким образом, начало координат имеет координаты (0, 0, 0) , а единичные точки на трёх осях — это (1, 0, 0) , (0, 1, 0) и (0, 0, 1) .
Стандартных названий координат по трем осям нет (однако термины абсцисса , ордината и аппликат иногда используются ). Координаты часто обозначаются буквами X , Y и Z или x , y и z . Затем оси могут называться осью X , осью Y и осью Z соответственно. Тогда координатные гиперплоскости можно назвать XY -плоскостью, YZ -плоскостью и XZ -плоскостью.
В контексте математики, физики и техники первые две оси часто определяются или изображаются как горизонтальные, а третья ось направлена вверх. В этом случае третью координату можно назвать высотой или высотой . Ориентация обычно выбирается так, чтобы угол 90 градусов от первой оси до второй оси выглядел против часовой стрелки, если смотреть из точки (0, 0, 1) ; соглашение, которое обычно называют правилом правой руки .

Высшие измерения
[ редактировать ]Поскольку декартовы координаты уникальны и однозначны, точки декартовой плоскости можно идентифицировать с парами действительных чисел ; то есть с декартовым произведением , где представляет собой совокупность всех действительных чисел. Точно так же точки в любом евклидовом пространстве размерности n можно отождествить с наборами (списками) из n действительных чисел; то есть с декартовым произведением .



Обобщения
[ редактировать ]Концепция декартовых координат обобщается, позволяя использовать оси, которые не перпендикулярны друг другу, и/или разные единицы измерения вдоль каждой оси. В этом случае каждая координата получается путем проецирования точки на одну ось в направлении, параллельном другой оси (или, вообще, гиперплоскости, определяемой всеми остальными осями). В такой наклонной системе координат вычисления расстояний и углов должны быть изменены по сравнению с расчетами в стандартных декартовых системах, и многие стандартные формулы (например, формула Пифагора для расстояния) не выполняются (см. Аффинную плоскость ).
Обозначения и соглашения
[ редактировать ]Декартовы координаты точки обычно записываются в скобках и разделяются запятыми, например (10, 5) или (3, 5, 7) . обозначается заглавной буквой О. Происхождение часто В аналитической геометрии неизвестные или общие координаты часто обозначаются буквами ( x , y ) на плоскости и ( x , y , z ) в трехмерном пространстве. Этот обычай возник из алгебраического соглашения, согласно которому буквы в конце алфавита используются для обозначения неизвестных величин (например, координаты точек во многих геометрических задачах), а буквы в начале — для заданных величин.
Эти условные имена часто используются в других областях, таких как физика и техника, хотя могут использоваться и другие буквы. Например, на графике, показывающем, как давление меняется со временем , координаты графика могут обозначаться p и t . Каждая ось обычно называется по координате, отсчитываемой вдоль нее; поэтому говорят: ось X , ось Y , ось T и т. д.
Другое распространенное соглашение об именовании координат — использование индексов, таких как ( x 1 , x 2 , ..., x n ) для n координат в n -мерном пространстве, особенно когда n больше 3 или не указано. Некоторые авторы предпочитают нумерацию ( x 0 , x 1 , ..., x n −1 ). Эти обозначения особенно выгодны в компьютерном программировании : сохраняя координаты точки в виде массива , а не записи , нижний индекс может служить для индексации координат.
В математических иллюстрациях двумерных декартовых систем первая координата (традиционно называемая абсциссой ) измеряется вдоль горизонтальной оси, ориентированной слева направо. Вторая координата ( ордината ) затем измеряется вдоль вертикальной оси, обычно ориентированной снизу вверх. Маленькие дети, изучающие декартову систему, обычно изучают порядок чтения значений, прежде чем закреплять концепции осей x , y и z , начиная с двухмерной мнемоники (например, «Иди по коридору, затем поднимись по лестнице», что похоже на прямо поперек оси X , затем вверх вертикально вдоль оси Y ).
Однако компьютерная графика и обработка изображений часто используют систему координат с осью Y , ориентированной вниз на дисплее компьютера. Это соглашение было разработано в 1960-х годах (или раньше) на основе того, как изображения изначально хранились в буферах дисплея .
Для трехмерных систем принято изображать плоскость xy горизонтально с добавлением оси z для обозначения высоты (положительная вверх). Более того, существует соглашение об ориентации оси X по отношению к зрителю, смещенной вправо или влево. Если на диаграмме ( 3D-проекция или 2D-перспективный рисунок ) оси X и Y показаны горизонтально и вертикально соответственно, то ось Z должна быть показана направленной «за пределы страницы» в сторону зрителя или камеры. В такой двумерной диаграмме трехмерной системы координат ось z будет выглядеть как линия или луч, указывающий вниз и влево или вниз и вправо, в зависимости от предполагаемого зрителя или перспективы камеры . На любой диаграмме или дисплее ориентация трех осей в целом произвольна. Однако ориентация осей относительно друг друга всегда должна соответствовать правилу правой руки , если специально не указано иное. Все законы физики и математики предполагают эту праворукость , что обеспечивает последовательность.
В трехмерных диаграммах названия «абсцисса» и «ордината» редко используются для x и y соответственно. Когда это так, координату z иногда называют аппликатом . Слова абсцисса , ордината и аппликат иногда используются для обозначения осей координат, а не значений координат. [8]
Квадранты и октанты
[ редактировать ]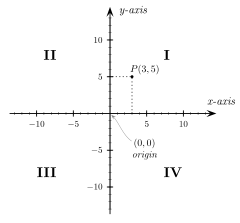
Оси двумерной декартовой системы делят плоскость на четыре бесконечные области, называемые квадрантами . [8] каждая ограничена двумя полуосями. Они часто нумеруются от 1-го до 4-го и обозначаются римскими цифрами : I (где обе координаты имеют положительные знаки), II (где абсцисса отрицательна -, а ордината положительна +), III (где и абсцисса, и ордината являются -) и IV (абсцисса +, ордината -). При построении осей по математическому обычаю нумерация идет против часовой стрелки, начиная с правого верхнего («северо-восточного») квадранта.
Точно так же трехмерная декартова система определяет деление пространства на восемь областей или октантов . [8] по знакам координат точек. Соглашение, используемое для обозначения определенного октанта, заключается в перечислении его знаков; например, (+ + +) или (− + −) . Обобщением квадранта и октанта на произвольное количество измерений является ортант , и применяется аналогичная система именования.
Декартовы формулы для плоскости
[ редактировать ]Расстояние между двумя точками
[ редактировать ]Евклидово расстояние между двумя точками плоскости с декартовыми координатами и является



Это картезианская версия теоремы Пифагора . В трехмерном пространстве расстояние между точками и является



которое можно получить двумя последовательными применениями теоремы Пифагора. [9]
Евклидовы преобразования
[ редактировать ]Евклидовы преобразования или евклидовы движения — это ( биективные ) отображения точек евклидовой плоскости в себя, которые сохраняют расстояния между точками. Существует четыре типа этих отображений (также называемых изометриями): перемещения , вращения , отражения и скользящие отражения . [10]
Перевод
[ редактировать ]Перевод набора точек плоскости с сохранением расстояний и направлений между ними эквивалентен добавлению фиксированной пары чисел ( a , b ) к декартовым координатам каждой точки набора. То есть, если исходные координаты точки ( x , y ) , после перевода они будут

Вращение
[ редактировать ]Повернуть вокруг фигуру против часовой стрелки начала координат на некоторый угол эквивалентно замене каждой точки с координатами ( x , y ) на точку с координатами ( x' , y' ), где


Таким образом:

Отражение
[ редактировать ]Если ( x , y ) — декартовы координаты точки, то (− x , y ) — координаты ее отражения через вторую ось координат (ось y), как если бы эта линия была зеркалом. Аналогично, ( x , − y ) являются координатами его отражения через первую ось координат (ось x). В более общем смысле, отражение от линии, проходящей через начало координат, образующей угол. с осью x, эквивалентно замене каждой точки с координатами ( x , y ) точкой с координатами ( x ′, y ′) , где

Таким образом:

Скольжение отражения
[ редактировать ]Скользящее отражение — это композиция отражения поперек линии с последующим перемещением в направлении этой линии. Видно, что порядок этих операций не имеет значения (сначала может идти перевод, а затем отражение).
Общая матричная форма преобразований
[ редактировать ]Все аффинные преобразования плоскости можно единообразно описать с помощью матриц. Для этого координаты точки обычно представляются в виде матрицы-столбца Результат применения аффинного преобразования к точке определяется формулой где 2×2 представляет собой матрицу и представляет собой матрицу-столбец. [11] То есть,







Среди аффинных преобразований евклидовы преобразования характеризуются тем, что матрица является ортогональным ; то есть его столбцы являются ортогональными векторами евклидовой нормы один, или, явно, и



Это эквивалентно утверждению, что A , умноженное на транспонирование, является единичной матрицей . Если эти условия не выполняются, формула описывает более общее аффинное преобразование .
Преобразование является переводом тогда и только тогда, когда A является единичной матрицей . Преобразование является вращением вокруг некоторой точки тогда и только тогда, когда A является матрицей вращения , что означает, что она ортогональна и

Отражение или скользящее отражение получается, когда:

Предполагая, что переводы не используются (т. ) преобразования могут быть составлены путем простого умножения соответствующих матриц преобразования. В общем случае полезно использовать расширенную матрицу преобразования; то есть переписать формулу преобразования где С помощью этого трюка композиция аффинных преобразований получается путем умножения расширенных матриц.



Аффинное преобразование
[ редактировать ]Аффинные преобразования евклидовой плоскости — это преобразования, которые отображают линии в линии, но могут изменять расстояния и углы. Как сказано в предыдущем разделе, их можно представить с помощью расширенных матриц:

Евклидовы преобразования — это аффинные преобразования, такие, что матрица 2 × 2 является ортогональным .

Расширенная матрица, представляющая собой композицию двух аффинных преобразований, получается перемножением их расширенных матриц.
Некоторые аффинные преобразования, не являющиеся евклидовыми преобразованиями, получили особые названия.
Масштабирование
[ редактировать ]Примером аффинного преобразования, которое не является евклидовым, является масштабирование. Увеличение или уменьшение фигуры эквивалентно умножению декартовых координат каждой точки на одно и то же положительное число m . Если ( x , y ) — координаты точки на исходной фигуре, соответствующая точка на масштабированной фигуре имеет координаты

Если m больше 1, цифра становится больше; если m находится между 0 и 1, оно становится меньше.
стрижка
[ редактировать ]Преобразование сдвига сдвинет верхнюю часть квадрата в сторону, образуя параллелограмм. Горизонтальный сдвиг определяется:

Сдвиг также можно применять вертикально:

Ориентация и рука
[ редактировать ]В двух измерениях
[ редактировать ]
Фиксация или выбор оси X определяет ось Y с точностью до направления. А именно, ось y обязательно является перпендикуляром к оси x через точку, отмеченную цифрой 0 на оси x . Но есть выбор, какую из двух полупрямых на перпендикуляре обозначить положительной, а какую отрицательной. Каждый из этих двух вариантов определяет различную ориентацию (также называемую направленностью ) декартовой плоскости.
Обычный способ ориентации плоскости, при котором положительная ось X направлена вправо, а положительная ось Y — вверх (при этом ось X является «первой», а ось Y — «второй» осью), считается положительная или стандартная ориентация, также называемая правосторонней ориентацией.
Обычно используемая мнемоника для определения положительной ориентации — это правило правой руки . Положив несколько сомкнутую правую руку на плоскость большим пальцем вверх, пальцы указывают от оси x к оси y в положительно ориентированной системе координат.
Другой способ ориентации плоскости — следовать правилу левой руки : положить левую руку на плоскость большим пальцем вверх.
Когда большой палец направлен от начала координат вдоль оси в сторону положительного момента, кривизна пальцев указывает на положительное вращение вдоль этой оси.
Независимо от правила, используемого для ориентации плоскости, вращение системы координат сохранит ориентацию. Переключение любой оси изменит ориентацию, но переключение обеих оставит ориентацию неизменной.
В трех измерениях
[ редактировать ]
После x и y указания осей они определяют линию , вдоль которой должна лежать ось z , но для этой линии есть две возможные ориентации. Две возможные системы координат, которые возникают в результате, называются «правосторонней» и «левой». [12] Стандартная ориентация, при которой плоскость xy горизонтальна, а ось z направлена вверх (а оси x и y образуют положительно ориентированную двумерную систему координат в плоскости xy, если наблюдать сверху xy ) плоскости . ) называется правым или положительным .

Название происходит от правила правой руки . Если указательный палец правой руки направлен вперед, средний палец согнут внутрь под прямым углом к нему, а большой палец расположен под прямым углом к обоим, то три пальца обозначают взаимную ориентацию х- , у- , и z - оси в правосторонней системе. Большой палец указывает ось X , указательный палец — ось Y , а средний палец — Z. ось И наоборот, если то же самое сделать левой рукой, получится левосторонняя система.
На рисунке 7 изображены левая и правая системы координат. Поскольку трехмерный объект представлен на двухмерном экране, возникают искажения и неоднозначность. Ось, направленная вниз (и вправо), также должна указывать на наблюдателя, тогда как «средняя» ось должна указывать от наблюдателя. Красный круг параллелен горизонтальной плоскости xy и указывает вращение от оси x к оси y (в обоих случаях). Следовательно, красная стрелка проходит перед осью z .
Рисунок 8 представляет собой еще одну попытку изобразить правую систему координат. Опять же, возникает неясность, вызванная проецированием трехмерной системы координат на плоскость. Многие наблюдатели рассматривают рисунок 8 как «переворачивание» между выпуклым кубом и вогнутым «углом». Это соответствует двум возможным ориентациям пространства. Если рассматривать фигуру как выпуклую, получается левая система координат. Таким образом, «правильный» способ просмотра рисунка 8 — это представить ось X направленной на наблюдателя и, таким образом, видеть вогнутый угол.
Представление вектора в стандартном базисе
[ редактировать ]Точка в пространстве в декартовой системе координат также может быть представлена вектором положения , который можно рассматривать как стрелку, указывающую от начала системы координат к точке. [13] Если координаты представляют пространственные положения (смещения), вектор от начала координат до точки интереса обычно представляют как . В двух измерениях вектор от начала координат до точки с декартовыми координатами (x, y) можно записать как:


где и представляют собой единичные векторы в направлении осей x и y соответственно, обычно называемые стандартным базисом (в некоторых областях применения они также могут называться версорами ). Аналогично, в трех измерениях вектор от начала координат до точки с декартовыми координатами можно записать как: [14]




где и



Не существует естественной интерпретации умножения векторов для получения другого вектора, который работает во всех измерениях, однако есть способ использовать комплексные числа для такого умножения. В двумерной декартовой плоскости отождествите точку с координатами ( x , y ) с комплексным числом z = x + iy . Здесь i — мнимая единица измерения и отождествляется с точкой с координатами (0, 1) , поэтому это не единичный вектор в направлении оси x . Поскольку комплексные числа можно умножать, получая другое комплексное число, эта идентификация обеспечивает средство «умножения» векторов. В трехмерном декартовом пространстве аналогичную идентификацию можно провести с подмножеством кватернионов .
См. также
[ редактировать ]- Робот с декартовыми координатами
- Горизонтальный и вертикальный
- Диаграмма Джонса , на которой изображены четыре переменные, а не две.
- Ортогональные координаты
- Полярная система координат
- Регулярная сетка
- Сферическая система координат
Цитаты
[ редактировать ]- ^ Бикс, Роберт А.; Д'Суза, Гарри Дж. «Аналитическая геометрия» . Британская энциклопедия . Проверено 6 августа 2017 г.
- ^ Кент и Вуякович, 2017 , см . здесь.
- ^ Кац, Виктор Дж. (2009). История математики: введение (3-е изд.). Бостон: Аддисон-Уэсли. п. 484. ИСБН 978-0-321-38700-4 . OCLC 71006826 .
- ^ Бертон 2011 , с. 374.
- ^ Берлин, 2011 г.
- ^ Экслер 2015 , с. 1
- ^ Рассмотрим два луча или полулинии, возникающие в результате разделения линии в начале координат. Одну из полустрочек можно отнести к положительным числам, а другую — к отрицательным числам.
- ↑ Перейти обратно: Перейти обратно: а б с д «Декартова ортогональная система координат» . Энциклопедия математики . Проверено 6 августа 2017 г.
- ^ Хьюз-Халлетт, МакКаллум и Глисон, 2013 г.
- ^ Смарт 1998 , Глава. 2
- ^ Браннан, Эсплен и Грей 1998 , стр. 49
- ^ Антон, Бивенс и Дэвис, 2021 , с. 657
- ^ Браннан, Эсплен и Грей 1998 , Приложение 2, стр. 377–382.
- ^ Гриффитс 1999
Общие и цитируемые ссылки
[ редактировать ]- Экслер, Шелдон (2015). Линейная алгебра сделана правильно . Тексты для бакалавриата по математике. Спрингер. дои : 10.1007/978-3-319-11080-6 . ISBN 978-3-319-11079-0 . Архивировано из оригинала 27 мая 2022 года . Проверено 17 апреля 2022 г.
- Берлински, Дэвид (2011). Экскурсия по исчислению . Издательская группа Кнопфа Doubleday. ISBN 9780307789730 .
- Браннан, Дэвид А.; Эсплен, Мэтью Ф.; Грей, Джереми Дж. (1998). Геометрия . Кембридж: Издательство Кембриджского университета. ISBN 978-0-521-59787-6 .
- Бертон, Дэвид М. (2011). История математики/Введение (7-е изд.). Нью-Йорк: МакГроу-Хилл. ISBN 978-0-07-338315-6 .
- Гриффитс, Дэвид Дж. (1999). Введение в электродинамику . Прентис Холл. ISBN 978-0-13-805326-0 .
- Хьюз-Халлетт, Дебора; МакКаллум, Уильям Г.; Глисон, Эндрю М. (2013). Исчисление: одно- и многомерное (6-е изд.). Джон Уайли и сыновья . ISBN 978-0470-88861-2 .
- Кент, Александр Дж.; Вуякович, Питер (4 октября 2017 г.). Справочник Routledge по картографии и картографии . Рутледж. ISBN 9781317568216 .
- Смарт, Джеймс Р. (1998), Современная геометрия (5-е изд.), Pacific Grove: Brooks/Cole, ISBN 978-0-534-35188-5
- Антон, Ховард; Бивенс, Ирландия К.; Дэвис, Стивен (2021). Исчисление: многомерное . Джон Уайли и сыновья . п. 657. ИСБН 978-1-119-77798-4 .
Дальнейшее чтение
[ редактировать ]- Декарт, Рене (2001). Рассуждения о методе, оптике, геометрии и метеорологии . Перевод Пола Дж. Оскампа (пересмотренная ред.). Индианаполис, Индиана: Hackett Publishing. ISBN 978-0-87220-567-3 . OCLC 488633510 .
- Корн Г.А., Корн ТМ (1961). Математический справочник для ученых и инженеров (1-е изд.). Нью-Йорк: МакГроу-Хилл. стр. 55–79 . LCCN 59-14456 . OCLC 19959906 .
- Маргенау Х. , Мерфи Г.М. (1956). Математика физики и химии . Нью-Йорк: Д. ван Ностранд. LCCN 55-10911 .
- Мун П., Спенсер Д.Э. (1988). «Прямоугольные координаты (x, y, z)». Справочник по теории поля, включая системы координат, дифференциальные уравнения и их решения (исправленное 2-е, 3-е печатные изд.). Нью-Йорк: Springer-Verlag. С. 9–11 (табл. 1.01). ISBN 978-0-387-18430-2 .
- Морс П.М. , Фешбах Х. (1953). Методы теоретической физики . Часть I. Нью-Йорк: МакГроу-Хилл. ISBN 978-0-07-043316-8 . LCCN 52-11515 .
- Зауэр Р., Сабо I (1967). Математический инструментарий инженера . Нью-Йорк: Springer Verlag. LCCN 67-25285 .
Внешние ссылки
[ редактировать ]- Декартова система координат
- Вайсштейн, Эрик В. «Декартовы координаты» . Математический мир .
- Конвертер координат – преобразует полярные, декартовы и сферические координаты.
- Координаты точки – интерактивный инструмент для изучения координат точки.
- Класс JavaScript с открытым исходным кодом для манипулирования 2D/3D декартовой системой координат
| Базы данных органов управления : Национальные |
|---|