В механике сплошной среды теория бесконечно малых деформаций представляет собой математический подход к описанию деформации твердого тела, в котором смещения материальных частиц считаются намного меньшими (действительно, бесконечно меньшими), чем любой соответствующий размер тела; так что можно предположить, что его геометрия и конститутивные свойства материала (такие как плотность и жесткость ) в каждой точке пространства не изменяются в результате деформации.
При таком предположении уравнения механики сплошной среды значительно упрощаются. Этот подход также можно назвать теорией малых деформаций , теорией малых смещений или теорией малого градиента смещений . Это контрастирует с теорией конечных деформаций , в которой делается противоположное предположение.
Теория бесконечно малых деформаций обычно применяется в гражданском и машиностроении для анализа напряжений конструкций, построенных из относительно жестких упругих материалов, таких как бетон и сталь , поскольку общей целью проектирования таких конструкций является минимизация их деформации при типичных нагрузках . Однако такое приближение требует осторожности в случае тонких гибких тел, таких как стержни, пластины и оболочки, которые подвержены значительным вращениям, что делает результаты ненадежными. [1]
Для бесконечно малых деформаций сплошного тела , у которых тензор градиента смещений (тензор 2-го порядка) мал по сравнению с единицей, т.е. , можно выполнить геометрическую линеаризацию любого из тензоров конечных деформаций, используемых в теории конечных деформаций, например лагранжева тензора конечных деформаций. и эйлеров тензор конечной деформации . При такой линеаризации пренебрегают нелинейными членами или членами второго порядка тензора конечных деформаций. Таким образом, мы имеем
или и или
Эта линеаризация подразумевает, что лагранжево и эйлерово описание примерно одинаковы, поскольку существует небольшая разница в материальных и пространственных координатах данной материальной точки в континууме. Следовательно, компоненты тензора градиента смещения материала и компоненты тензора градиента пространственного смещения примерно равны. Таким образом, мы имеем или где являются компонентами тензора бесконечно малых деформаций , также называемый тензором деформации Коши , тензором линейной деформации или тензором малой деформации .
или используя другие обозначения:
Кроме того, поскольку градиент деформации можно выразить как где — тождественный тензор второго порядка, имеем
Кроме того, из общего выражения для лагранжевых и эйлеровых тензоров конечной деформации имеем
Рассмотрим двумерную деформацию бесконечно малого прямоугольного материального элемента с размерами к (рис. 1), который после деформации принимает форму ромба. Из геометрии рисунка 1 имеем
Для очень малых градиентов смещения, т.е. , у нас есть
Нормальное напряжение в -направление прямоугольного элемента определяется формулой и зная это , у нас есть
Аналогично, нормальная деформация в -направление и -направление, становится
Инженерная деформация сдвига или изменение угла между двумя изначально ортогональными линиями материала, в данном случае линией и , определяется как
Из геометрии рисунка 1 имеем
Для малых вращений, т.е. и являются у нас есть и снова для малых градиентов смещения имеем таким образом Путем обмена и и и , можно показать, что .
Аналогично, для - и - самолеты, у нас есть
Можно видеть, что компоненты тензорной деформации сдвига тензора бесконечно малых деформаций могут быть выражены с использованием определения инженерной деформации: , как
При малых деформациях будем считать, что , таким образом, второй член левой части становится: .
Тогда у нас есть где , — единичный вектор в направлении , а выражение в левой части представляет собой нормальную деформацию в направлении . Для частного случая в направление, т.е. , у нас есть
Аналогично, для и мы можем найти нормальные штаммы и , соответственно. Следовательно, диагональные элементы тензора бесконечно малых деформаций представляют собой нормальные деформации в координатных направлениях.
Если мы выберем ортонормированную систему координат ( ) мы можем записать тензор в терминах компонентов относительно этих базовых векторов как В матричной форме Мы можем легко выбрать другую ортонормированную систему координат ( ) вместо. В этом случае компоненты тензора различны, скажем Компоненты деформации в двух системах координат связаны соотношением где соглашение Эйнштейна о суммировании для повторяющихся индексов и использовалось . В матричной форме или
Некоторые операции с тензором деформации дают один и тот же результат независимо от того, какая ортонормированная система координат используется для представления компонентов деформации. Результаты этих операций называются инвариантами деформации . Наиболее часто используемые инварианты деформации: По компонентам
Можно показать, что можно найти систему координат ( ), в котором компоненты тензора деформаций имеют вид Компоненты тензора деформаций в ( ) системы координат называются главными деформациями , а направления называются направлениями главных деформаций. Поскольку в этой системе координат нет компонентов сдвиговой деформации, основные деформации представляют собой максимальное и минимальное растяжения элементарного объема.
Если нам даны компоненты тензора деформаций в произвольной ортонормированной системе координат, мы можем найти главные деформации, используя разложение по собственным значениям , определяемое решением системы уравнений Эта система уравнений эквивалентна нахождению вектора вдоль которого тензор деформации становится чистым растяжением без компонента сдвига.
Объемная деформация , также называемая объемной деформацией , представляет собой относительное изменение объема, возникающее в результате расширения или сжатия ; это первый инвариант деформации или след тензора: Действительно, если рассматривать куб с длиной ребра a , то после деформации (изменение углов не меняет объема) это квазикуб с размерами и V 0 = а 3 , таким образом поскольку мы рассматриваем малые деформации, поэтому формула.
В случае чистого сдвига мы видим, что изменения объема нет.
Позволять ( ) — направления трех основных деформаций. Октаэдрическая плоскость — это плоскость, нормаль которой составляет равные углы с тремя главными направлениями. Инженерная деформация сдвига в октаэдрической плоскости называется октаэдрической деформацией сдвига и определяется выражением где являются основными штаммами. [ нужна ссылка ]
Скалярная величина, называемая эквивалентной деформацией или эквивалентной деформацией фон Мизеса , часто используется для описания состояния деформации в твердых телах. В литературе можно найти несколько определений эквивалентного штамма. В литературе по пластичности обычно используется определение : Эта величина является работой, сопряженной с эквивалентным напряжением, определяемым как
Для заданных компонентов деформации уравнение тензора деформации представляет собой систему шести дифференциальных уравнений для определения трех составляющих перемещений , давая переопределенную систему. Таким образом, для произвольного выбора компонентов деформации решения, вообще говоря, не существует. Поэтому некоторые ограничения, называемые уравнениями совместимости на компоненты деформации накладываются . С добавлением трех уравнений совместимости количество независимых уравнений сокращается до трех, что соответствует количеству неизвестных компонентов смещения. Эти ограничения на тензор деформации были обнаружены Сен-Венаном и называются « уравнениями совместимости Сен-Венана ».
Функции совместимости служат для обеспечения однозначности функции непрерывного перемещения. . Если представить упругую среду как набор бесконечно малых кубов в недеформированном состоянии, то после того, как среда деформирована, произвольный тензор деформаций не может привести к ситуации, в которой искаженные кубы все еще подходят друг к другу, не перекрываясь.
В индексной записи уравнения совместимости выражаются как
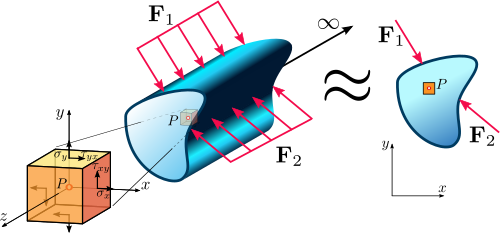
В реальных инженерных компонентах напряжение (и деформация) представляют собой трехмерные тензоры, но в призматических конструкциях, таких как длинная металлическая заготовка, длина конструкции намного больше, чем два других измерения. Деформации, связанные с длиной, т. е. нормальная деформация и сдвиговые деформации и (если длина указана в трех направлениях) ограничены близлежащим материалом и малы по сравнению с деформациями поперечного сечения . Тогда плоская деформация является приемлемым приближением. Тензор деформации для плоской деформации записывается как: в котором двойное подчеркивание указывает на тензор второго порядка . Такое деформированное состояние называется плоской деформацией . Соответствующий тензор напряжений: в котором ненулевое необходимо для поддержания ограничения . Этот член напряжения можно временно удалить из анализа, чтобы оставить только члены в плоскости, эффективно сводя трехмерную задачу к гораздо более простой двумерной задаче.
Антиплоская деформация — это еще одно особое состояние деформации, которое может возникнуть в теле, например, в области, близкой к винтовой дислокации . Тензор деформации для антиплоской деформации определяется выражением
Тензор бесконечно малых деформаций определяется как Поэтому градиент смещения можно выразить как где Количество — тензор бесконечно малого вращения или тензор бесконечно малого углового смещения (связанный с матрицей бесконечно малого вращения ). Этот тензор кососимметричен . Для бесконечно малых деформаций скалярные компоненты удовлетворить условие . Обратите внимание, что градиент смещения мал только в том случае, если и тензор деформации, и тензор вращения бесконечно малы.
Кососимметричный тензор второго порядка имеет три независимые скалярные компоненты. Эти три компонента используются для определения аксиального вектора . , следующее где является символом перестановки . В матричной форме Осевой вектор также называют вектором бесконечно малого вращения . Вектор вращения связан с градиентом смещения соотношением В индексном обозначении Если и тогда материал подвергается приблизительному вращению твердого тела на величину вокруг вектора .
Связь между тензором деформации и вектором вращения
Учитывая непрерывное однозначное поле перемещений и соответствующий тензор бесконечно малых деформаций , имеем (см. Тензорная производная (механика сплошной среды) ) Поскольку изменение порядка дифференцирования не меняет результата, . Поэтому Также Следовательно
Сферические координаты ( r , θ , φ ), обычно используемые в физике : радиальное расстояние r , полярный угол θ ( тета ) и азимутальный угол φ ( фи ). Символ ρ ( rho ) часто используется вместо r .
В сферических координатах ( ), вектор смещения можно записать как Компоненты тензора деформаций в сферической системе координат имеют вид [2]
^ Борези, Артур П. (Артур Питер), 1924– (2003). Расширенная механика материалов . Шмидт, Ричард Дж. (Ричард Джозеф), 1954– (6-е изд.). Нью-Йорк: Джон Уайли и сыновья. п. 62. ИСБН 1601199228 . ОСЛК 430194205 . {{cite book}}: CS1 maint: несколько имен: список авторов ( ссылка ) CS1 maint: числовые имена: список авторов ( ссылка )
Arc.Ask3.Ru Номер скриншота №: ffa7923bc6c6c08ad50a3ff3feab07c7__1718157720 URL1:https://arc.ask3.ru/arc/aa/ff/c7/ffa7923bc6c6c08ad50a3ff3feab07c7.html Заголовок, (Title) документа по адресу, URL1: Infinitesimal strain theory - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)

















![{\displaystyle {\begin{aligned}\mathbf {E} _{(m)}&={\frac {1}{2m}}(\mathbf {U} ^{2m}-{\boldsymbol {I}} )={\frac {1}{2m}}[({\boldsymbol {F}}^{T}{\boldsymbol {F}})^{m}-{\boldsymbol {I}}]\approx {\ frac {1}{2m}}[\{{\boldsymbol {\nabla }}\mathbf {u} +({\boldsymbol {\nabla }}\mathbf {u} )^{T}+{\boldsymbol {I }}\}^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\\\mathbf {e} _{(m)}&={\frac {1}{2m }}(\mathbf {V} ^{2m}-{\boldsymbol {I}})={\frac {1}{2m}}[({\boldsymbol {F}}{\boldsymbol {F}}^{ T})^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f23afe38e5f63d74050dbaf5d362b65b4da1ca0)























































![{\displaystyle {\begin{aligned}I_{1} &=\mathrm {tr} ({\boldsymbol {\varepsilon }})\\I_{2}&={\tfrac {1}{2}}\{ [\mathrm {tr} ({\boldsymbol {\varepsilon }})]^{2}-\mathrm {tr} ({\boldsymbol {\varepsilon }}^{2})\}\\I_{3}& =\det({\boldsymbol {\varepsilon }})\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdc12c6f3d7e5049f74857861c3178c3f6728d99)





































![{\displaystyle {\boldsymbol {\varepsilon }}={\frac {1}{2}}[{\boldsymbol {\nabla }}\mathbf {u} +({\boldsymbol {\nabla }}\mathbf {u } )^{T}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a120dd47853fdf623ed080096e75e2069e84c220)

![{\displaystyle {\boldsymbol {W}}:={\frac {1}{2}}[{\boldsymbol {\nabla }}\mathbf {u} -({\boldsymbol {\nabla }}\mathbf {u } )^{T}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/96f7c996edd7b15b9d61e5274b9927c5ca3e68dc)












![{\displaystyle {\boldsymbol {\nabla }}\times {\boldsymbol {\varepsilon }}=e_{ijk}~\varepsilon _{lj,i}~\mathbf {e} _{k}\times \mathbf { e} _{l}={\tfrac {1}{2}}~e_{ijk}~[u_{l,ji}+u_{j,li}]~\mathbf {e} _{k}\times \mathbf {e} _{l}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13fbd0b77f6478a70d04b0f31759e5076ca30028)













