Режимы управления полетом
Эта статья нуждается в дополнительных цитатах для проверки . ( июль 2014 г. ) |
Возможно, этот раздел придется переписать, Википедии чтобы он соответствовал стандартам качества . ( январь 2015 г. ) |

Режим управления полетом или закон управления полетом — это алгоритм компьютерного программного обеспечения, который преобразует движение штурвала или джойстика , совершаемое пилотом самолета, в движения поверхностей управления самолетом. Движения поверхности управления зависят от того, в каком из нескольких режимов находится бортовой компьютер. На самолетах, в которых система управления полетом является электродистанционной , движения, которые пилот совершает с помощью штурвала или джойстика в кабине , для управления полетом, преобразуются в электронные сигналы, которые передаются на компьютеры управления полетом , которые определяют, как перемещать каждую поверхность управления, чтобы обеспечить движение самолета по указанию пилота. [1] [2] [3] [4]
Сокращение электронного управления полетом может быть вызвано отказом вычислительного устройства, такого как компьютер управления полетом, или устройства предоставления информации, такого как инерциальный эталонный блок воздушных данных (ADIRU). [5]
Электронные системы управления полетом (EFCS) также обеспечивают дополнительные возможности в обычном полете, такие как повышенная защита самолета от перегрузки или обеспечение более комфортного полета для пассажиров путем распознавания и корректировки турбулентности и обеспечения демпфирования рыскания . [ нужна ссылка ]
Два производителя самолетов производят коммерческие пассажирские самолеты с основными бортовыми компьютерами, которые могут работать в различных режимах управления полетом. Наиболее известна система нормального , попеременного , прямого законов и механических попеременных законов управления самолетов Airbus A320 — A380 . [3] Другая — Boeing электродистанционная система , используемая в Boeing 777 , Boeing 787 Dreamliner и Boeing 747-8 . [4] [6]
В этих новых самолетах используются электронные системы управления для повышения безопасности и производительности при одновременном снижении веса самолета. Эти электронные системы легче старых механических систем, а также могут защитить самолет от перенапряжения, позволяя конструкторам сократить количество перегруженных компонентов, что еще больше снижает вес самолета. [ нужна ссылка ]
Законы о контроле полетов (Airbus)
[ редактировать ]
Конструкции самолетов Airbus после А300 / А310 практически полностью управляются электродистанционным оборудованием. Эти новые самолеты, включая A320 , A330 , A340 , A350 и A380 , работают в соответствии с законами Airbus об управлении полетами. [7] Например, все органы управления полетом Airbus A330 управляются электроникой и активируются гидравлически. Некоторые поверхности, такие как руль направления, также могут управляться механически. В обычном полете компьютеры предотвращают чрезмерные силы при тангаже и крене. [7]

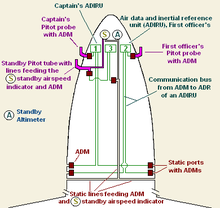
Самолет управляется тремя основными компьютерами управления (капитанским, первым помощником и резервным) и двумя дополнительными компьютерами управления (капитанским и первым помощником капитана). Кроме того, есть два компьютера данных управления полетом (FCDC), которые считывают информацию с датчиков, например данные о воздухе (скорость, высота). Они передаются вместе с данными GPS в три резервных блока обработки, известные как инерциальные опорные блоки воздушных данных (ADIRU), которые действуют как опорные данные о воздухе и как инерциальные опорные. ADIRU являются частью инерциальной системы отсчета данных о воздухе, которая на Airbus связана с восемью модулями данных о воздухе : три связаны с трубками Пито и пять связаны со статическими источниками. Информация от ADIRU подается в один из нескольких компьютеров управления полетом (основной и вторичный контроль полета). Компьютеры также получают информацию от рулей самолета, а также от приборов управления самолетом и автопилота пилота. Информация с этих компьютеров передается как на основной полетный дисплей пилота, так и на поверхности управления. [ нужна ссылка ]
Существует четыре названных закона управления полетом, однако альтернативный закон состоит из двух режимов: альтернативного закона 1 и альтернативного закона 2 . Каждый из этих режимов имеет различные подрежимы: наземный режим, режим полета и подсветку, а также резервное механическое управление . [7]
Нормальный закон
[ редактировать ]Нормальный закон различается в зависимости от этапа полета. К ним относятся: [ нужна ссылка ]
- Стационарный у ворот
- Руление от ворот до ВПП или от ВПП обратно до ворот
- Начало разбега при разбеге
- Начальный подъем
- Круизный набор высоты и круизный полет на высоте
- Финальный спуск, развал и приземление.
При переходе от взлета к крейсерскому переходу происходит 5-секундный переход, от снижения к развальцовке - двухсекундный переход, а от взлета к земле - еще 2-секундный переход в нормальном законе . [7]
Наземный режим
[ редактировать ]Самолет ведет себя как в прямом режиме: функция автотриммера отключена и происходит прямая реакция рулей высоты на нажатия сайдстиков. Горизонтальный стабилизатор установлен на 4° вверх, но ручные настройки (например, центр тяжести) отменяют эту настройку. После того, как колеса отрываются от земли, происходит 5-секундный переход, при котором обычный закон – режим полета берет верх над режимом на земле . [7]
Режим полета
[ редактировать ]Режим полета по нормальному закону обеспечивает пять типов защиты: угол тангажа, ограничение перегрузки, высокая скорость, большой угол обзора и угол крена . Режим полета работает с момента взлета и до момента приземления самолета на высоте около 100 футов над уровнем земли. Он может быть утерян преждевременно в результате команд пилота или сбоев системы. Потеря нормального закона в результате сбоя системы приводит к альтернативному закону 1 или 2 . [8]
В отличие от обычных органов управления, в нормальных законах вертикальное перемещение боковой ручки управления соответствует коэффициенту нагрузки, пропорциональному отклонению ручки управления, независимо от скорости самолета. Когда ручка управления находится в нейтральном положении и коэффициент перегрузки равен 1g, самолет остается в горизонтальном полете без изменения пилотом триммера руля высоты. Горизонтальное движение бокового джойстика определяет скорость крена, и самолет сохраняет правильный угол тангажа после выполнения разворота, вплоть до крена 33°. Система предотвращает дальнейшее дифферентирование, когда угол атаки чрезмерен, коэффициент перегрузки превышает 1,3g или когда угол крена превышает 33°. [ нужна ссылка ]
Альфа-защита (α-Prot) предотвращает опрокидывание и защищает от воздействия сдвига ветра. Защита срабатывает, когда угол атаки находится между α-Prot и α-Max, и ограничивает угол атаки, заданный боковым джойстиком пилота, или, если включен автопилот, она отключает автопилот. [ нужна ссылка ]
Защита высокой скорости автоматически восстанавливается после превышения скорости. Существует два ограничения скорости для высотных самолетов: V MO (максимальная эксплуатационная скорость) и M MO (максимальная эксплуатационная скорость Маха). Эти две скорости одинаковы на высоте примерно 31 000 футов, ниже которой превышение скорости определяется V MO , а выше - M MO. . [ нужна ссылка ]
Режим вспышки
[ редактировать ]
Этот режим включается автоматически, когда радиовысотомер показывает высоту 100 футов над землей. На высоте 50 футов самолет слегка опустил нос. время приземления Во обычные законы предусматривают защиту от атаки под большим углом и защиту от угла крена. Допускается коэффициент нагрузки от 2,5 г до -1 г или от 2,0 г до 0 г при выдвинутых предкрылках. Угол тангажа ограничен от -15° до +30°, а верхний предел дополнительно снижается до +25° по мере замедления самолета. [7]
Альтернативный закон
[ редактировать ]Существует четыре режима реконфигурации самолета Airbus с электродистанционным управлением: альтернативный закон 1 , альтернативный закон 2 , прямой закон и механический закон . Основной режим и режимы вспышки для альтернативного закона идентичны режимам для нормального закона .
альтернативного закона 1 Режим (ALT1) сочетает в себе боковой режим нормального закона с коэффициентом перегрузки, при этом сохраняется защита от угла крена. Защита от большого угла атаки может быть потеряна, а защита от низкой энергии (сваливания в горизонтальном полете) может быть потеряна. Защита с высокой скоростью и большим углом атаки переходит в режим альтернативного закона. [8]
ALT1 может быть введен в случае неисправности горизонтального стабилизатора, руля высоты, срабатывания демпфера рыскания, датчика предкрылка или закрылка или одиночной неисправности эталонных данных о воздухе. [7]
Альтернативный закон 2 (ALT2) теряет режим нормального бокового закона (замененный режимом прямого крена и альтернативным режимом рыскания), а также защиту от угла тангажа, защиту от угла крена и защиту от низкой энергии. Защита по коэффициенту нагрузки сохраняется. Защита от большого угла атаки и высокой скорости сохраняется, если только причиной альтернативного режима закона 2 не является отказ двух эталонных данных о воздухе или если две оставшиеся эталонные данные о воздухе не совпадают. [8]
Режим ALT2 включается при загорании двух двигателей (на двухдвигательных самолетах), неисправностях в двух эталонах инерциальных или воздушных данных, потере автопилота, за исключением случаев несогласия с ДОПОГ. В этот режим также можно войти при неисправности всех спойлеров, неисправности определенных элеронов или неисправности датчиков педалей. [7]
Прямой закон
[ редактировать ]Прямой закон (DIR) вводит прямую связь между прикосновением и поверхностями управления: [7] Движение руля напрямую связано с движением сайдстика и педали руля направления. [3] Регулируемым горизонтальным стабилизатором можно управлять только с помощью ручного триммерного колеса. Вся защита утрачена, а максимальное отклонение рулей высоты ограничено для каждой конфигурации в зависимости от текущего центра тяжести самолета. Это направлено на создание компромисса между адекватным контролем тангажа с передней ЦТ и не слишком чувствительным управлением с задней ЦТ. [9]
DIR вводится при выходе из строя трех инерциальных опорных блоков или основных бортовых компьютеров, неисправности двух рулей высоты или загорания двух двигателей (на двухдвигательном самолете), когда также неработоспособен и основной бортовой компьютер капитана. [7]
Механическое управление
[ редактировать ]В резервном режиме механического управления тангаж контролируется механической системой триммирования, а поперечное направление контролируется педалями руля направления, приводящими руль направления механически. [3]
Основная система управления полетом Боинга 777
[ редактировать ]
Дистанционная электронная система управления полетом Boeing 777 отличается от Airbus EFCS. Принцип проектирования заключается в создании системы, которая реагирует аналогично системе с механическим управлением. [10] Поскольку система управляется электроникой, система управления полетом может обеспечить границ полета защиту .
Электронная система разделена на два уровня: четыре электроники управления приводом (ACE) и три основных бортовых компьютера (PFC). ACE управляют исполнительными механизмами (от тех, что находятся на пилотных органах управления, до органов управления на поверхности и PFC). Роль PFC заключается в расчете законов управления и обеспечении сил обратной связи, пилотной информации и предупреждений. [10]
Стандартные защиты и улучшения
[ редактировать ]Система управления полетом Боинга 777 предназначена для ограничения полномочий управления за пределами определенного диапазона путем увеличения противодавления после достижения желаемого предела. Это осуществляется с помощью приводов обратного привода с электронным управлением (управляемых ACE). К средствам защиты и дополнениям относятся: защита угла крена, компенсация поворота, защита от сваливания, защита от превышения скорости, контроль тангажа, увеличение устойчивости и компенсация асимметрии тяги. Философия конструкции такова: «информировать пилота о том, что подаваемая команда выведет самолет за пределы его обычного режима работы, но возможность сделать это не исключается». [10]
Обычный режим
[ редактировать ]В нормальном режиме PFC передают команды привода на ACE, которые преобразуют их в аналоговые сервокоманды. Предоставляется полная функциональность, включая все улучшенные характеристики, защиту корпуса и функции качества езды. [ нужна ссылка ]
Вторичный режим
[ редактировать ]Boeing Вторичный режим можно сравнить с альтернативным законом Airbus , в котором PFC передают команды ACE. Однако функциональность EFCS снижается, включая потерю защиты от ограничений диапазона полета. Как и в системе Airbus, это состояние переводится при возникновении ряда сбоев в EFCS или взаимодействующих системах (например, ADIRU или SAARU ). При этом в случае полного выхода из строя всех PFC и ACE, элероны и отдельные интерцепторы крена подключаются к органам управления пилота тросом управления, что позволяет временно осуществлять механическое управление. [5] [4]
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ «Законы об управлении полетами» . SKYbrary Авиационная безопасность . Проверено 03 июля 2019 г.
- ^ «Управление полетом часть 3» . Угол Бьорна . 25 марта 2016 г.
- ^ Jump up to: а б с д «Пересекая небо » Законы об электромеханическом управлении и Airbus» . www.crossingtheskies.com . Архивировано из оригинала 8 марта 2009 года.
- ^ Jump up to: а б с «Боинг 777» (PowerPoint) . Саураб Чеда .
- ^ Jump up to: а б «Скайбрари: Законы управления полетами» .
- ^ «Журнал «Авионика» :: Боинг 787: следующий шаг интеграции» . Архивировано из оригинала 23 сентября 2015 г. Проверено 19 июля 2009 г.
- ^ Jump up to: а б с д и ж г час я дж «Airbus 330 – Системы – Управление полетом» . SmartCockpit — учебные пособия для авиакомпаний, авиация, эксплуатация, безопасность . Архивировано из оригинала 12 июня 2009 года . Проверено 12 июля 2009 г.
- ^ Jump up to: а б с «Законы об управлении полетами Airbus» .
- ^ Airbus A320 AFM (требуется номер страницы, издатель и т. д.)
- ^ Jump up to: а б с Грегг Ф. Бартли – Boeing (4 мая 2008 г.). «11 Boeing B-777: электродистанционное управление полетом» (PDF) . Проверено 8 октября 2016 г.