Рулевое управление

Рулевое управление – это контроль направления движения. [ 1 ] или компоненты, которые позволяют им управлять. [ 2 ] Рулевое управление осуществляется с помощью различных устройств, в том числе элеронов для самолетов, рулей направления для лодок, наклонных винтов для вертолетов. [ 3 ] и многое другое.
Самолет
[ редактировать ]Системы управления полетом самолета обычно управляются в воздухе с помощью элеронов , спойлеронов или того и другого для поворота самолета; хотя руль направления также можно использовать для поворота самолета, обычно он используется для минимизации неблагоприятного рыскания , а не как средство непосредственного вызова разворота. На земле самолеты обычно управляются на низких скоростях путем поворота носового или хвостового колеса (с помощью румпеля или педалей руля направления) или посредством дифференциального торможения, а также с помощью руля направления на высоких скоростях. Ракеты, дирижабли и большие суда на воздушной подушке обычно управляются с помощью руля направления, вектора тяги или того и другого. Небольшие спортивные суда на воздушной подушке имеют аналогичные рули направления, но управление ими в основном осуществляется за счет того, что пилот переносит свой вес из стороны в сторону и выводит из равновесия более мощные подъемные силы под юбкой. Реактивные ранцы и летающие платформы управляются только за счет вектора тяги. [ нужна ссылка ]
Управление полетом вертолета осуществляется с помощью циклического управления, изменяющего вектор тяги несущего винта (винтов), и управления противотормозным моментом, обычно обеспечиваемого рулевым винтом. [ нужна ссылка ]
Автомобильная промышленность
[ редактировать ]
В этом разделе есть несколько проблем. Пожалуйста, помогите улучшить его или обсудите эти проблемы на странице обсуждения . ( Узнайте, как и когда удалять эти шаблонные сообщения )
|
Традиционное автомобильное рулевое управление позволяет водителю контролировать направление движения транспортного средства, поворачивая направление передних колес с помощью рулевого колеса с ручным управлением , расположенного перед водителем. Рулевое колесо прикреплено к рулевой колонке , которая связана с тягами, шарнирами и шестернями, позволяющими водителю изменять направление движения передних колес. Механизм может включать в себя реечный механизм, преобразующий несколько поворотов рулевого колеса в большое линейное перемещение. В качестве альтернативы можно использовать систему рециркуляции шариков . Механизм может иметь привод , обычно гидравлический или электрический.
Использование регулируемой рейки (по-прежнему с использованием обычной шестерни) было изобретено Артуром Эрнестом Бишопом . [ 4 ] в 1970-х годах, чтобы улучшить реакцию автомобиля и обеспечить более комфортное рулевое управление, особенно на высоких скоростях. Он также разработал недорогой процесс штамповки на прессе для изготовления стоек, устраняющий необходимость механической обработки зубьев шестерен.
Другие устройства иногда встречаются на разных типах транспортных средств; например, румпель или рулевое управление задними колесами. Гусеничные транспортные средства, такие как бульдозеры и танки, обычно используют дифференциальное рулевое управление , при котором гусеницы перемещаются с разной скоростью или даже в противоположных направлениях с использованием сцепления и тормозов для изменения направления. [ нужна ссылка ]
Общие компоненты системы рулевого управления включают в себя:
Геометрия
[ редактировать ]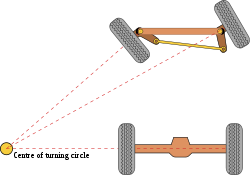
Основная цель рулевого управления — обеспечить, чтобы колеса были направлены в нужном направлении для перемещения автомобиля в нужном направлении. Обычно это достигается с помощью ряда рычагов, стержней, шарниров и шестерен. Одним из фундаментальных понятий является угол кастера . Каждое колесо управляется с помощью точки поворота впереди колеса, что приводит к самоцентрированию рулевого управления в направлении движения.
Рулевые тяги, соединяющие рулевой механизм и колеса, обычно соответствуют вариации геометрии рулевого управления Аккермана , чтобы учесть тот факт, что при повороте внутреннее колесо движется по траектории меньшего радиуса, чем внешнее колесо, так что степень схождение подходит для движения по прямой, не подходит для поворотов. Угол, который колеса образуют в вертикальной плоскости, известный как угол развала , также влияет на динамику рулевого управления, как и шины.
-
 Аккерман рулевое управление
Аккерман рулевое управление -
 Коленчатое рулевое управление
Коленчатое рулевое управление -
 Реечное рулевое управление
Реечное рулевое управление -
 Короткое реечное рулевое управление
Короткое реечное рулевое управление -
 Угол наклона θ обозначает линию поворота шкворня , а серая зона обозначает шину автомобиля, при которой колесо движется справа налево. Положительный угол кастора способствует курсовой устойчивости , поскольку колесо имеет тенденцию буксовать, но большой угол затрудняет рулевое управление.
Угол наклона θ обозначает линию поворота шкворня , а серая зона обозначает шину автомобиля, при которой колесо движется справа налево. Положительный угол кастора способствует курсовой устойчивости , поскольку колесо имеет тенденцию буксовать, но большой угол затрудняет рулевое управление. -
Кривые, описываемые задними колесами обычного автомобиля. Пока автомобиль движется с постоянной скоростью, его внутренние и внешние задние колеса не двигаются.





Поворот рулевого колеса часто измеряется количеством полных поворотов на 360 градусов до упора . Это когда механизм ввода рулевого управления удерживается на своем механическом пределе от полного упора правого поворота до упора левого поворота.
Реечная шестерня, рециркуляционный шарик, червяк и сектор
[ редактировать ]

Многие современные автомобили имеют рулевой механизм, называемый реечным механизмом . Рулевое колесо вращает шестерню, которая перемещает рейку вперед и назад, управляя колесами. Этот механизм преобразует круговое движение рулевого колеса в линейное , которое передается на колеса автомобиля через рулевые тяги и поворотный кулак .
Реечное рулевое управление имеет ряд преимуществ, таких как ощущение прямого рулевого управления. Это означает, что водитель может лучше чувствовать дорогу и точнее контролировать движение автомобиля.
BMW была одним из первых производителей, принявших реечные системы рулевого управления в 1930-х годах, и многие другие европейские производители последовали этому примеру. Американские автопроизводители начали использовать реечное рулевое управление в Ford Pinto 1974 года . [ 5 ]
В более старых конструкциях используются два основных принципа: червячная и секторная конструкция, а также винт и гайка. Оба типа были усовершенствованы за счет уменьшения трения; для винта и гайки это механизм рециркуляции шариков , который до сих пор встречается на грузовиках и транспортных средствах общего назначения. Рулевая колонка поворачивает большой винт, который входит в зацепление с гайкой посредством вращающихся шариков. Гайка перемещает сектор шестерни, заставляя ее вращаться вокруг своей оси при повороте винта; рычаг, прикрепленный к оси сектора, перемещает рычаг шатуна , который соединен с рулевой тягой и таким образом управляет колесами. Версия этого устройства с рециркуляцией шариков снижает значительное трение за счет размещения больших шарикоподшипников между винтом и гайкой. На обоих концах устройства шарики выходят между двумя частями во внутренний канал коробки, который соединяет их с другим концом устройства. Таким образом, они «рециркулируются».
Шаровой механизм с рециркуляцией имеет преимущество в гораздо большем механическом преимуществе, поэтому его можно было найти на более крупных и тяжелых транспортных средствах, в то время как реечный механизм изначально использовался только для меньших и легких; Однако из-за почти повсеместного внедрения гидроусилителя руля это больше не является важным преимуществом, что приводит к более широкому использованию реечного механизма на новых автомобилях. Конструкция шарика с рециркуляцией также имеет заметный зазор или «мертвую зону» в центре, где малейший поворот рулевого колеса в любом направлении не приводит к перемещению рулевого устройства; это легко регулируется с помощью винта на конце рулевого механизма, чтобы учесть износ, но его невозможно устранить, поскольку в других положениях он будет создавать чрезмерные внутренние силы, и механизм будет очень быстро изнашиваться. Эта конструкция до сих пор используется в грузовиках и других крупных транспортных средствах, где скорость рулевого управления и чувствительность рулевого управления менее важны, чем надежность, ремонтопригодность и механические преимущества.
Червяк и сектор были более старой конструкцией, использовавшейся, например, в автомобилях Willys и Chrysler, а также в Ford Falcon (1960-е годы). Для уменьшения трения сектор заменяется роликом или вращающимися штифтами на коромысле вала.
Как правило, в старых автомобилях используется шариковый механизм рециркуляции, и только в новых автомобилях используется реечное рулевое управление. Однако это разделение не очень строгое, и реечные системы рулевого управления можно встретить на британских спортивных автомобилях середины 1950-х годов, а некоторые немецкие автопроизводители не отказывались от технологии рециркуляции шариков до начала 1990-х годов.
Существуют и другие системы рулевого управления, но они редко встречаются на дорожных транспортных средствах. В детских игрушках и картингах часто используется очень прямая связь в виде коленчатого рычага (также известного как рычаг шатуна), прикрепленного непосредственно между рулевой колонкой и рулевыми рычагами, а также используются рулевые тяги с тросовым приводом (например, рулевые тяги с тросовым приводом). шпиль и механизм тетивы) также встречается на некоторых самодельных транспортных средствах, таких как автомобили-мыльницы и лежачие трехколесные велосипеды .
Усилитель руля
[ редактировать ]Усилитель рулевого управления помогает водителю транспортного средства управлять автомобилем, направляя часть мощности двигателя на поворот управляемых опорных катков вокруг их рулевых осей. Поскольку транспортные средства стали тяжелее и перешли на передний привод , особенно с использованием геометрии с отрицательным смещением, а также с увеличением ширины и диаметра шин, усилие, необходимое для поворота колес вокруг оси поворота, увеличилось, часто до такой степени, что это приводит к серьезным физическим нагрузкам. было бы необходимо, если бы не энергетическая помощь. Чтобы облегчить эту проблему, автопроизводители разработали системы рулевого управления с гидроусилителем, или, точнее, рулевое управление с усилителем, поскольку на дорожных транспортных средствах в качестве средства обеспечения безопасности должна быть предусмотрена механическая связь . Существует два типа систем гидроусилителя руля: гидравлический и электрический/электронный. Также возможна гидравлическо-электрическая гибридная система.
Гидравлический усилитель рулевого управления (HPS) использует гидравлическое давление, подаваемое насосом с приводом от двигателя, для содействия повороту рулевого колеса. Электрический усилитель рулевого управления (EPS) более эффективен, чем гидравлический, поскольку электродвигателю рулевого управления необходимо оказывать помощь только при повороте рулевого колеса, а гидравлический насос должен работать постоянно. В EPS объем помощи легко настраивается в зависимости от типа автомобиля, скорости дороги и предпочтений водителя. Дополнительным преимуществом является устранение опасности для окружающей среды, связанной с утечкой и утилизацией жидкости гидроусилителя рулевого управления. Кроме того, электрическая помощь не теряется, когда двигатель выходит из строя или глохнет, тогда как гидравлическая помощь перестает работать, если двигатель останавливается, что делает рулевое управление вдвойне тяжелым, поскольку теперь водителю приходится поворачивать не только очень тяжелое рулевое управление — без посторонней помощи — но и рулевое управление. сама система энергопомощи.
Чувствительное к скорости рулевое управление
[ редактировать ]Чувствительное к скорости рулевое управление позволяет использовать усиленное рулевое управление на низких скоростях для обеспечения маневренности и легкое рулевое управление на высокой скорости для обеспечения устойчивости. Первым автомобилем с этой функцией был Citroën SM с системой DIRAVI , впервые проданный во Франции в 1970 году. [ 6 ] Гидравлическая система рулевого управления приложила усилие к центрирующему кулачку, которое вернуло рулевую рейку и колесо в положение прямолинейного движения. Центрирующая сила увеличивалась с увеличением скорости, поэтому для поворота колеса на большей скорости требовалось больше усилий. [ 7 ]
Современные чувствительные к скорости системы рулевого управления с усилителем уменьшают механическую или электрическую помощь по мере увеличения скорости автомобиля, обеспечивая более прямое ощущение. Эта функция постепенно становится все более распространенной. Например, в 2023 году его использовали на серийном пикапе Tesla Cybertruck. [ 8 ] [ 9 ] : 51:28
Четырехколесное рулевое управление
[ редактировать ]
Полноприводное рулевое управление — это система, используемая некоторыми транспортными средствами для улучшения реакции рулевого управления, повышения устойчивости автомобиля при маневрировании на высокой скорости или для уменьшения радиуса поворота на низкой скорости.
Активное рулевое управление четырьмя колесами
[ редактировать ]В активной системе рулевого управления четырьмя колесами все четыре колеса поворачиваются одновременно, когда водитель поворачивает. В большинстве активных систем рулевого управления четырьмя колесами задние колеса управляются компьютером и приводами. [ 10 ] Задние колеса обычно не могут поворачиваться так же далеко, как передние. Могут быть элементы управления для отключения заднего рулевого управления и опции для управления только задними колесами независимо от передних колес. На малой скорости (например, при парковке) задние колеса поворачиваются навстречу передним, уменьшая радиус поворота, что иногда критично для больших грузовых автомобилей, тягачей, автомобилей с прицепами и легковых автомобилей с большой колесной базой, а на более высоких скоростях - как передние, так и задние колеса. поворот одинаково (с электронным управлением), так что автомобиль может менять положение с меньшим рысканьем и улучшенным нарастанием бокового ускорения, повышая устойчивость на прямой. [ 10 ] [ 11 ] Таким образом, «эффект змеи», возникающий при движении по автомагистрали при буксировке туристического прицепа, практически сводится к нулю. [ сомнительно – обсудить ]
Полноприводное рулевое управление нашло свое наиболее широкое применение в грузовиках-монстрах , где маневренность на небольших аренах имеет решающее значение, а также оно популярно в больших сельскохозяйственных машинах и грузовиках. Некоторые современные европейские междугородние автобусы также используют рулевое управление четырьмя колесами для улучшения маневренности на автовокзалах, а также для улучшения устойчивости на дороге. Компания Mazda была пионером в применении рулевого управления всеми четырьмя колесами в автомобилях, продемонстрировав это на своем концепт-каре Mazda MX-02 1984 года, где задние колеса поворачивались в противоположную сторону на низких скоростях. [ 12 ] Mazda приступила к предложению версии этой электронной системы рулевого управления четырьмя колесами на Mazda 626 и MX6 в 1988 году. Первым раллийным автомобилем, в котором использовалась эта технология, был Peugeot 405 Turbo 16 , который дебютировал в 1988 году на Pikes Peak International Hill Climb. [ 13 ]
Раньше Honda использовала механическое рулевое управление всеми четырьмя колесами в качестве опции в своих моделях Prelude и Honda Ascot 1987–2001 годов (1989–1996 годов), которые позже были модернизированы до электронного управления. General Motors предлагала Quadrasteer от Delphi для своих автомобилей Silverado/Sierra и Suburban/Yukon. Из-за низкого спроса GM прекратила выпуск этой технологии в конце 2005 модельного года. [ 14 ] Nissan/Infiniti предлагают несколько версий своей системы HICAS в стандартной комплектации или в качестве опции для большей части своей линейки.
В начале 2000-х годов на рынок было представлено новое поколение полноприводных систем рулевого управления. В 2001 году BMW оснастила E65 7-й серии полноприводной системой рулевого управления (опция, называемой «Integral Active Steering»), которая доступна на нынешних 5, 6 и 7 сериях. [ 15 ] [ 16 ] [ 11 ] как вариант. Renault представила опциональное полноприводное рулевое управление под названием «4control». [ 17 ] [ 18 ] [ 19 ] в 2009 году сначала на Laguna GT , который в настоящее время доступен на Talisman , [ 18 ] Меган [ 17 ] и Эспас [ 19 ] линии автомобиля. В 2013 году Porsche представила эту систему на 911 Turbo в качестве стандартного оборудования. [ 20 ] С 2016 года Panamera предлагается с опциональным полным рулевым управлением. [ 21 ] 2014 года Audi Q7 выпускался с дополнительной системой. [ 22 ] Также японские производители предлагают автомобили люкс-сегмента, оснащенные полноприводным рулевым управлением, например, Infiniti на модели QX70 («Заднее активное рулевое управление»). [ 23 ] и Лексус на GS. [ 24 ] Итальянские производители внедрили эту технологию в модели 2016–17 годов с Ferrari F12tdf . [ 25 ] Феррари GTC4Луссо [ 26 ] а также Lamborghini Aventador S. [ 27 ]
-
 Ранний пример четырехколесного рулевого управления. Фотография 1910 года: трактор Caldwell Vale мощностью 80 л.с. в действии.
Ранний пример четырехколесного рулевого управления. Фотография 1910 года: трактор Caldwell Vale мощностью 80 л.с. в действии. -
 Mercedes-Benz Type G 5 1937 года выпуска с полным рулевым управлением.
Mercedes-Benz Type G 5 1937 года выпуска с полным рулевым управлением. -
 Sierra Denali с Quadrasteer , задний угол поворота рулевого колеса.
Sierra Denali с Quadrasteer , задний угол поворота рулевого колеса. -
 Сочлененный Арнема троллейбус демонстрирует рулевое управление четырьмя колесами на передней и задней оси (2006 г.).
Сочлененный Арнема троллейбус демонстрирует рулевое управление четырьмя колесами на передней и задней оси (2006 г.). -
 Задний рулевой механизм Honda Prelude Mk III
Задний рулевой механизм Honda Prelude Mk III





Крабовое рулевое управление
[ редактировать ]Крабовое рулевое управление — это особый тип активного рулевого управления четырьмя колесами. Он работает, поворачивая все колеса в одном направлении и под одним и тем же углом. Крабовое рулевое управление используется, когда транспортному средству необходимо двигаться по прямой, но под углом: при перестроении на шоссе на скорости, при перемещении грузов ричтраком или во время съемок тележкой.
Управление задними колесами также можно использовать, когда задние колеса не следуют по траектории гусениц передних колес (например, для уменьшения уплотнения почвы при использовании перекатного сельскохозяйственного оборудования).
-
 Liebherr-Bauma 2007 года выпуска Телескопический погрузчик с крабовым рулевым управлением.
Liebherr-Bauma 2007 года выпуска Телескопический погрузчик с крабовым рулевым управлением. -
 Тандемный каток Hamm DV70 с крабовым рулевым управлением для покрытия максимальной поверхности дороги (2010 г.).
Тандемный каток Hamm DV70 с крабовым рулевым управлением для покрытия максимальной поверхности дороги (2010 г.). -
 Аппликатор сельскохозяйственной навозной жижи с крабовым рулевым управлением для минимизации уплотнения почвы (2009 г.).
Аппликатор сельскохозяйственной навозной жижи с крабовым рулевым управлением для минимизации уплотнения почвы (2009 г.).



Пассивное рулевое управление задними колесами
[ редактировать ]Многие современные [ временные рамки? ] автомобили имеют пассивное рулевое управление задними колесами. На многих автомобилях при прохождении поворота задние колеса имеют тенденцию слегка поворачиваться наружу при повороте, что может снизить устойчивость. Пассивная система рулевого управления использует боковые силы, возникающие при повороте (благодаря геометрии подвески), и втулки, чтобы исправить эту тенденцию и слегка повернуть колеса внутрь поворота. Это улучшает устойчивость автомобиля в повороте. Этот эффект называется недостаточной поворачиваемостью ; он или его противоположность присутствует на всех подвесках. Типичными методами обеспечения соответствия требованиям недостаточной поворачиваемости являются использование тяги Уатта на ведущем заднем мосту или использование втулок управления схождением на подвеске с поворотной балкой . На независимой задней подвеске это обычно достигается путем изменения скоростей резиновых втулок в подвеске. Некоторые подвески обычно имеют избыточную поворачиваемость из-за геометрии, например, ведущие мосты Hotchkiss , полуприцепной рычаг IRS и задние поворотные балки, но это можно смягчить путем внесения изменений в точки поворота листовой рессоры или продольного рычага или дополнительных рычагов подвески. или сложная внутренняя геометрия втулок.
Пассивное рулевое управление задними колесами не является новой концепцией, поскольку оно используется уже много лет. [ временные рамки? ] хотя и не всегда признается таковым.
Шарнирно-сочлененное рулевое управление
[ редактировать ]
Шарнирно-сочлененное рулевое управление представляет собой систему, в которой транспортное средство разделено на переднюю и заднюю половины, соединенные вертикальным шарниром. Передняя и задняя половины соединены с одним или несколькими гидроцилиндрами , которые изменяют угол между половинками, включая переднюю и заднюю оси и колеса, таким образом управляя транспортным средством. В этой системе не используются рулевые рычаги, шкворни, рулевые тяги и т. д., как в системе рулевого управления четырьмя колесами. Если вертикальный шарнир расположен на равном расстоянии между двумя осями, это также устраняет необходимость в центральном дифференциале в полноприводных автомобилях, поскольку передняя и задняя оси будут следовать по одному и тому же пути и, следовательно, вращаться с одинаковой скоростью. Сочлененные самосвалы обладают очень хорошими внедорожными качествами.
Комбинации транспортных средств с прицепами, такие как полуприцепы, автопоезда , сочлененные автобусы и троллейбусы внутреннего транспорта, можно рассматривать как транспортные средства с пассивным шарнирным сочленением.
Рулевое управление задними колесами
[ редактировать ]Некоторые типы транспортных средств используют только заднее рулевое управление, в частности, вилочные погрузчики , тележки для камер , первые платные погрузчики , Бакминстера Фуллера автомобиль Dymaxion и ThrustSSC . [ 28 ]
В автомобилях рулевое управление задними колесами имеет тенденцию быть нестабильным, поскольку при поворотах геометрия рулевого управления меняется, что приводит к уменьшению радиуса поворота (избыточная поворачиваемость), а не к его увеличению (недостаточная поворачиваемость). Рулевое управление задними колесами предназначено для более медленных транспортных средств, которым требуется высокая маневренность в ограниченном пространстве, например, для вилочных погрузчиков.
Для перевозки тяжелых грузов или для повышения маневренности некоторые полуприцепы оснащаются рулевым управлением задними колесами с электрогидравлическим управлением. Колеса на всех или некоторых задних осях могут быть повернуты на разные углы, чтобы обеспечить более крутые повороты, или на один и тот же угол (крабовое рулевое управление), чтобы сдвинуть заднюю часть прицепа вбок.
Управление по проводам
[ редактировать ]


Целью технологии электродистанционного управления является полное удаление как можно большего количества механических компонентов (рулевой вал, колонка, редуктор и т. д.). Полная замена традиционной системы рулевого управления на электрическую имеет ряд преимуществ, таких как:
- Отсутствие рулевой колонки упрощает дизайн салона автомобиля.
- Отсутствие рулевого вала, колонки и редуктора позволяет значительно лучше использовать пространство в моторном отсеке.
- Рулевой механизм может быть спроектирован и установлен как модульный блок.
- Без механического соединения между рулевым колесом и опорным колесом вероятность того, что при лобовом столкновении рулевое колесо ударит водителя, меньше.
- Характеристики системы рулевого управления можно легко отрегулировать, чтобы изменить реакцию и ощущение рулевого управления.
Электроуправление без использования рулевой колонки впервые было предложено на серийном автомобиле Nissan Infiniti Q50 в 2013 году. [ 29 ] Электроуправление по-прежнему предлагалось для QX50 и QX55, а с 2022 года оно будет предлагаться для купе Infiniti Q60 . [ 30 ]
К серийным аккумуляторным электромобилям 2020-х годов, предлагающим электронное управление без рулевой колонки, относятся Canoo Lifestyle Vehicle , [ 31 ] Лексус РЗ 450е , [ 32 ] Автомобили на базе модуля REE Automotive P7 , [ 33 ] Тойота бЗ4Х , [ 30 ] и Тесла Кибертрак . [ 34 ] По состоянию на 2023 год Лотус , [ 35 ] Пежо , [ 36 ] и Mercedes-Benz планируют предложить автомобили с электронным управлением в середине-конце 2020-х годов. [ 37 ]
Безопасность
[ редактировать ]Традиционно автомобили имеют складную рулевую колонку (рулевая колонка с энергопоглощением), которая разрушается в случае сильного лобового удара, чтобы избежать чрезмерных травм водителя. Подушки безопасности также обычно входят в стандартную комплектацию. Нескладывающиеся рулевые колонки, установленные на старых автомобилях, очень часто натыкались на водителей при лобовых столкновениях, особенно когда рулевой механизм или рейка были установлены перед линией передней оси, в передней части зоны деформации . Это было особенно проблемой для автомобилей, которые имели жесткую отдельную раму шасси без зоны деформации. Рулевые коробки или рейки многих современных автомобилей устанавливаются за передней осью на передней переборке, в задней части передней зоны деформации.
Складные рулевые колонки были изобретены Белой Бареньи и внедрены в Mercedes-Benz W111 Fintail 1959 года вместе с зонами деформации. Эта функция безопасности впервые появилась [ когда? ] на автомобилях, построенных General Motors после обширной и публичной лоббистской кампании, проведенной Ральфом Нейдером . Форд начал устанавливать складные рулевые колонки в 1968 году. [ 38 ]
Audi использовала убирающееся рулевое колесо и систему натяжения ремней безопасности под названием procon-ten , но с тех пор от нее отказались в пользу подушек безопасности и пиротехнических преднатяжителей ремней безопасности.
Циклы
[ редактировать ]Этот раздел пуст. Вы можете помочь, добавив к нему . ( август 2021 г. ) |
См. раздел § Велосипеды .
Дифференциальное рулевое управление
[ редактировать ]Дифференциальное рулевое управление является основным средством управления гусеничными машинами , такими как танки и бульдозеры; [ 39 ] [ нужна страница ] он также используется в некоторых колесных транспортных средствах, широко известных как мини-погрузчики , и реализован в некоторых автомобилях, где это называется векторизацией крутящего момента , для улучшения рулевого управления путем изменения направления колес относительно транспортного средства.
Правила
[ редактировать ]- В Европейском Союзе, России и Японии правило 79 транспортных средств Европейской экономической комиссии ООН (ЕЭК ООН) связано с рулевым управлением.
- В Соединенных Штатах Федеральные стандарты безопасности транспортных средств 203 и 204 относятся к защите водителя от ударов системы рулевого управления и смещения рулевого управления назад, а § 393.209 Кодекса федеральных правил 49 относится к системам рулевого управления.
- В Северной Америке были введены и разрешены законом системы уровня 2 «без рук» или «громкой связи», позволяющие водителям снимать обе руки с рулевого колеса. Super Cruise от General Motors является такой реализацией. В этих конструкциях предупреждения выдаются, когда водитель отвлекает свое визуальное внимание. [ 40 ]
- В мае 2023 года в Европе правило 79 ЕЭК ООН по-прежнему требует, чтобы вспомогательные системы рулевого управления подсказывали водителям не снимать руки с рулевого колеса. Эти системы известны как «практические» системы. При использовании систем помощи при вождении с «практическим управлением» британские и европейские водители должны держать одну или обе руки на рулевом колесе, как и при вождении без посторонней помощи: При вождении с помощью системы рулевого управления, если водители убирают обе руки с рулевого управления колесе, оптическое предупреждение появляется через первые 15 секунд, а звуковое предупреждение — еще через 15 секунд. Усилитель рулевого управления отключается еще через 30 секунд. [ 40 ]
- В Соединенном Королевстве водители должны всегда контролировать транспортное средство, а Правило 160 Правил дорожного движения предписывает «водить машину, держась обеими руками за руль, где это возможно». и «использовать (ADAS) в соответствии с инструкциями производителя». [ 40 ]
Велосипеды
[ редактировать ]Управление велосипедом осуществляется поворотом руля и наклоном велосипедиста и велосипеда: [ 41 ]
- Поворот руля вращает переднее колесо относительно плоскости окружности заднего колеса. Трение переднего колеса о грунт создает боковые силы, которые управляют велосипедом. У современных велосипедов точка контакта переднего колеса с землей проходит за осью рулевого управления, которая является длинной осью велосипедной вилки, проходящей через центр переднего колеса. Эта задняя точка контакта усиливает эффекты инерции и смещения центра масс, которые влияют на рулевое управление и устойчивость велосипеда.
- Наклон рамы велосипеда , который смещает водителя и части велосипеда относительно оси по точкам контакта колес с землей. Затем гравитационные силы создают боковые силы, которые управляют велосипедом.
Водный транспорт
[ редактировать ]Корабли и лодки обычно управляются с помощью руля . В зависимости от размера судна рули направления могут приводиться в действие вручную или с помощью сервомеханизма , триммера или системы сервоприводов . греблю Для управления гребной лодкой можно использовать с помощью определенных движений веслами . Лодки с подвесными моторами управляются за счет вращения всего привода. Лодки со встроенными моторами иногда управляются только за счет вращения гребного винта (например, привод Volvo Penta IPS). Рулевые колеса могут использоваться для управления рулем направления или гребным винтом. На современных кораблях с дизель-электрическим приводом используются азимутальные подруливающие устройства . Лодки, приводимые в движение веслами или веслами, управляются за счет создания более высокой тяговой силы на стороне лодки, противоположной направлению поворота. Гидроциклы управляются за счет крена, вызванного смещением веса, и вектором тяги водометной струи . [ нужна ссылка ]
Руль судна может управлять кораблем только тогда, когда над ним течет вода. Следовательно, когда корабль не движется относительно воды, в которой он находится, или не может двигать рулем, он не реагирует на руль и считается потерявшим рулевое управление . Движение корабля по воде называется уступкой . Лодки на реках всегда должны находиться под движением, даже при движении вниз по течению, чтобы управляться, требуя, чтобы достаточное количество воды проходило по поверхности руля, чтобы вызвать изменение направления лодки в ответ на рулевое управление. Это называется «управлением». [ 42 ]
См. также
[ редактировать ]- Активное управление рысканьем (AYC)
- Отбойник
- Угол развала
- Развал тяги
- Угол кастера
- Контрруление
- СКАЗАТЬ
- Сухое рулевое управление
- ХИКАС
- Кингпин
- Противоположный замок
- Усилитель руля
- Мини-погрузчик
- Управление по проводам
- Рулевой демпфер
- Отдача рулевого управления
- Передаточное отношение рулевого управления
- Рулевое колесо
- Рулевое колесо (корабль)
- Тиллер
- Крутящий момент рулевого управления
- Радиус поворота
- Динамика автомобиля
Ссылки
[ редактировать ]- ^ Нобелевский институт нейрофизиологии (30 мая 2009 г.), «Руководство» , Каролинский институт
- ^ «рулевое управление», Словарь английского языка Коллинза (13-е изд.), 2018 г.
- ^ Джина Мисироглу (2010), Полезная книга ответов для детей (и родителей) (второе изд.), стр. 152–155.
- ^ «Рулевой механизм с реечным механизмом и переменным передаточным числом» . Патентный поиск Google . Проверено 22 марта 2007 г. [ мертвая ссылка ]
- ^ «Реечное рулевое управление | Hemmings Motor News» . Архивировано из оригинала 10 июля 2015 года . Проверено 24 июля 2015 г.
- ^ «Топ-5: инновации Citroen SM, которые видели будущее — Видео» . Архивировано из оригинала 11 мая 2015 года . Проверено 28 мая 2015 г.
- ^ «Citroen SM 1973 года» , Conceptcarz.com , 29 июня 2000 г.
- ^ Кевин Уильямс (30 ноября 2023 г.). «Ура, у Tesla Cybertruck есть электронное управление» . ВнутриEVs . Проверено 17 декабря 2023 г.
- ^ Сэнди Манро, Ларс Морави, Франц фон Хольцхаузен, Дрю Баглино, Пит Бэннон, Дэвид Лау (11 декабря 2023 г.). ГЛУБОКОЕ ПОГРУЖЕНИЕ Cybertruck с 5 руководителями Tesla! . Остин, Техас: Манро Live . Событие происходит в 48:29–51:50 . Проверено 17 декабря 2023 г. - через YouTube .
- ^ Перейти обратно: а б «Автомобили | AKC® — Активное управление кинематикой — ZF Friedrichshafen AG» . www.zf.com . Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ Перейти обратно: а б АГ, БМВ. «Седан BMW 5 серии: динамика движения и эффективность» . www.bmw.com . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ Линделл, Ханну (19 марта 1985 г.). «Год четырех». Мир технологий (на финском языке). Том 41, нет. 5/85. Хельсинки: ТМ-Юлкайсу. стр. Автомаилма 3. ISSN 0355-4287 .
- ^ "Peugeot 405 T16 GR Пайкс Пик 1988 года" . Проверено 16 марта 2015 г.
- ^ Мерфи, Том; Корбетт, Брайан (1 марта 2005 г.). «Квадраштир, сбившийся с курса» . Подопечные Авто Мир. Архивировано из оригинала 23 марта 2011 года . Проверено 11 июня 2010 г.
- ^ АГ, БМВ. «Седан BMW 7 серии: M Performance» . www.bmw.com . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ АГ, БМВ. «Купе BMW 6 серии: динамика движения» . www.bmw.com . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ Перейти обратно: а б «Особенность | Совершенно новый MEGANE Sport Tourer | Автомобили | Renault UK» . Рено . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ Перейти обратно: а б «Оборудование | Талисман | Частные транспортные средства | Транспортные средства | Renault FR» . Рено (на французском языке). Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ Перейти обратно: а б «Оборудование | Пространство | Легковой транспорт | Транспортные средства | Renault FR» . Рено (на французском языке). Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ "Porsche 911 Turbo - Рулевое управление задним мостом - Porsche Великобритания" . Porsche Великобритания - доктор технических наук. hc F. Porsche AG . Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Porsche Новая Panamera - Рулевое управление задней осью - Porsche Великобритания» . Porsche Великобритания - доктор технических наук. hc F. Porsche AG . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Audi Q7 > Конфигуратор Audi для Великобритании» . www.uk.audi.com . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Технические характеристики INFINITI QX70 — характеристики производительности и варианты двигателя» . Инфинити . Архивировано из оригинала 6 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Новости и события, Нойгкейтен» . www.lexus.de (на немецком языке). Архивировано из оригинала 22 февраля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Ferrari F12tdf: производительность на дороге на уровне трассы - Ferrari.com» . Феррари GT - ru-EN . Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «GTC4LUSSO T: максимальный контроль для уникальных впечатлений от вождения» . GTC4Луссо Т . Архивировано из оригинала 7 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Ламборгини Авентадор С Купе» . www.lamborghini.com . Архивировано из оригинала 25 апреля 2017 года . Проверено 6 апреля 2017 г.
- ^ «Тяга ССК – Инжиниринг» . Архивировано из оригинала 12 ноября 2010 года . Проверено 26 мая 2010 г.
- ^ Дженсер, Мэтт. «Загляните внутрь первого автомобиля с электронным управлением» . Проводной . Архивировано из оригинала 16 марта 2014 года . Проверено 6 марта 2017 г.
- ^ Перейти обратно: а б Голсон, Джордан (21 мая 2022 г.), «Что такое электронное управление?» , КапиталУан
- ^ Корн, Питер (19 марта 2023 г.), «Вот как выглядит управление самым захватывающим электромобилем — автомобилем Canoo Lifestyle» , MotorBiscuit
- ^ Голд, Аарон (2 мая 2022 г.), «Обзор рулевой вилки рулевого управления Lexus RZ 2023 модельного года: эта вилка — не шутка» , MotorTrend
- ^ Scooter Doll (2 мая 2023 г.), «REE Automotive добавляет новое шасси с кабиной P7-C в линейку полностью электрических платформ» , lectrek
- ^ Кевин Уильямс (30 ноября 2023 г.), «Ура, у Tesla Cybertruck есть электронное управление» , InsideEVs
- ^ Качер, Георг (10 июля 2023 г.), «Обзор Lotus Eletre 2024 года: первая международная поездка» , Какой автомобиль?
- ^ Чилтон, Крис (6 января 2023 г.), «Гиперквадратное рулевое управление на дорожных автомобилях к 2026 году, говорит генеральный директор Peugeot» , Carscoops
- ^ Аланис, Энтони (3 июля 2023 г.), «Новый Mercedes S-Class может иметь рулевое колесо с рулевой колонкой и больше физических кнопок» , Motor1.com
- ^ Умно, Джим. «Установка разборной рулевой колонки» . Архивировано из оригинала 28 декабря 2006 года.
- ^ Энциклопедия немецких танков Второй мировой войны Питера Чемберлена и Хилари Дойл, 1978, 1999.
- ^ Перейти обратно: а б с Карстен, Оливер; Перье, Микаэль; Джеймсон, Саманта (май 2023 г.). Внимательность водителя к вождению во время использования ADAS (технический отчет). Великобритания: Университет Лидса. дои : 10.13140/RG.2.2.31985.04961 .
- ^ Дж. П. Мейяард; и др. (11 июня 2007 г.), «Линеаризованные уравнения динамики для баланса и рулевого управления велосипеда: эталон и обзор» , Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , 463 (2084): 1955–1982, Bibcode : 2007RSPSA.463.1955M , doi : 10.1098/rspa.2007.1857 , S2CID 18309860
- ^ Смит, Уильям Генри ; Белчер, Эдвард (1867). Словарь моряка: алфавитный сборник морских терминов, включая некоторые, особенно военные и научные... а также архаизмы ранних мореплавателей и т. д . Лондон: Блэки и сын. п. 654.
Внешние ссылки
[ редактировать ]- Как работает рулевое управление автомобиля на HowStuffWorks
- Технический документ 2000 г. по кинематической конструкции реечных рулевых тяг.
- Технический документ 2002 г. по кинематической конструкции коленчатых рулевых тяг.
| Базы данных органов управления : Национальные |
|---|