В механике сплошных сред тензор напряжений Коши (обозначение , названный в честь Огюстена-Луи Коши ), также называемый истинным тензором напряжений [1] или просто тензор напряжений , полностью определяет состояние напряжения в точке внутри материала в деформированном состоянии, размещении или конфигурации. второго порядка Тензор состоит из девяти компонент единичной длины и связывает вектор направления e с вектором тяги T ( е ) по воображаемой поверхности, перпендикулярной e :
Тензор напряжений Коши подчиняется закону преобразования тензора при изменении системы координат. Графическим представлением этого закона трансформации является круг Мора для напряжений.
В соответствии с принципом сохранения импульса , если сплошное тело находится в статическом равновесии, можно показать, что компоненты тензора напряжений Коши в каждой материальной точке тела удовлетворяют уравнениям равновесия ( уравнения движения Коши при нулевом ускорении) . В то же время, согласно принципу сохранения углового момента , равновесие требует, чтобы сумма моментов по произвольной точке была равна нулю, что приводит к выводу, что тензор напряжений симметричен , имея, таким образом, только шесть независимых компонент напряжений. , вместо первоначальных девяти. Однако при наличии парных напряжений, т.е. моментов на единицу объема, тензор напряжений несимметричен. Это также имеет место, когда число Кнудсена близко к единице: , или континуум представляет собой неньютоновскую жидкость, что может привести к неинвариантным во вращении жидкостям, таким как полимеры .
С тензором напряжений связаны определенные инварианты, значения которых не зависят от выбранной системы координат или элемента площади, на котором действует тензор напряжений. Это три собственных значения тензора напряжений, которые называются главными напряжениями .
Принцип напряжения Эйлера – Коши - вектор напряжения
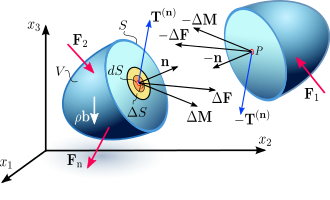
Рисунок 2.1a Внутреннее распределение контактных сил и парных напряжений на дифференциале внутренней поверхности в континууме, в результате взаимодействия двух частей континуума, разделенных поверхностью Рисунок 2.1b Внутреннее распределение контактных сил и парных напряжений на дифференциале внутренней поверхности в континууме, в результате взаимодействия двух частей континуума, разделенных поверхностью Рисунок 2.1c Вектор напряжений на внутренней поверхности S с вектором нормали n. В зависимости от ориентации рассматриваемой плоскости вектор напряжения не обязательно может быть перпендикулярен этой плоскости, т. е. параллелен ей. , и его можно разделить на две компоненты: одну компоненту, нормальную к плоскости, называемую нормальным напряжением. , и еще одна составляющая, параллельная этой плоскости, называемая касательным напряжением .
Принцип напряжений Эйлера-Коши гласит, что на любой поверхности (реальной или воображаемой), разделяющей тело, действие одной части тела на другую эквивалентно (эквивалентно) системе распределенных сил и пар на поверхности, разделяющей тело. тело , [2] и оно представлено полем , называемый вектором тяги , определенный на поверхности и предполагается, что он непрерывно зависит от единичного вектора поверхности . [3] [4] : стр.66–96
Чтобы сформулировать принцип напряжения Эйлера – Коши, рассмотрим воображаемую поверхность проходя через внутреннюю материальную точку разделив непрерывное тело на два сегмента, как показано на рис. 2.1а или 2.1б (можно использовать либо диаграмму секущей плоскости, либо диаграмму с произвольным объемом внутри континуума, окруженного поверхностью ).
Следуя классической динамике Ньютона и Эйлера , движение материального тела производится действием внешних сил , которые предполагаются двух видов: поверхностные силы. и телесные силы . [5] Таким образом, полная сила нанесенный на тело или на часть тела, может быть выражен как:
В этой статье будут обсуждаться только поверхностные силы, поскольку они имеют отношение к тензору напряжений Коши.
Когда тело подвергается воздействию внешних поверхностных сил или контактных сил. , следуя уравнениям движения Эйлера , внутренние контактные силы и моменты передаются от точки к точке тела и от одного сегмента к другому через разделительную поверхность , вследствие механического контакта одной части континуума с другой (рис. 2.1а и 2.1б). По элементу площади содержащий , с нормальным вектором , распределение силы эквивалентно контактной силе действующий в точке P и поверхностный момент . В частности, контактная сила определяется выражением
где это среднее поверхностное сцепление .
Принцип стресса Коши утверждает [6] : стр.47–102 это как становится очень малым и стремится к нулю отношения становится и вектор стресса пары исчезает. В конкретных областях механики сплошной среды предполагается, что парное напряжение не исчезает; однако классические разделы механики сплошной среды обращаются к неполярным материалам , которые не учитывают парные напряжения и моменты тела.
Результирующий вектор определяется как поверхностное сцепление , [7] также называемый вектором напряжения , [8] тяга , [4] или вектор тяги . [6] данный в точку связанный с плоскостью с нормальным вектором :
Это уравнение означает, что вектор напряжения зависит от его местоположения в теле и ориентации плоскости, на которую он действует.
Это означает, что уравновешивающее действие внутренних контактных сил создает плотность контактных сил или поле тяги Коши. [5] представляющий собой распределение внутренних контактных сил по объему тела при определенной конфигурации тела в данный момент времени. . Это не векторное поле, поскольку оно зависит не только от положения конкретной материальной точки, но также и от локальной ориентации элемента поверхности, определяемой его вектором нормали. . [9]
В зависимости от ориентации рассматриваемой плоскости вектор напряжения не обязательно может быть перпендикулярен этой плоскости, т. е. параллелен ей. , и может быть разделен на две компоненты (рис. 2.1c):
одно нормаль к плоскости, называемое нормальным напряжением
где это нормальная составляющая силы в дифференциальную зону
где - касательная составляющая силы к дифференциальной площади поверхности . Касательное напряжение можно дополнительно разложить на два взаимно перпендикулярных вектора.
Согласно постулату Коши , вектор напряжения остается неизменным для всех поверхностей, проходящих через точку и имеющий тот же вектор нормали в , [7] [10] т. е. имеющие общую касательную при . Это означает, что вектор напряжения является функцией вектора нормали. только и не зависит от кривизны внутренних поверхностей.
Следствием постулата Коши является основная лемма Коши : [1] [7] [11] также называемая теоремой взаимности Коши , [12] : стр.103–130 который гласит, что векторы напряжений, действующие на противоположные стороны одной и той же поверхности, равны по величине и противоположны по направлению. Основная лемма Коши эквивалентна третьему закону движения действия и противодействия Ньютона и выражается как
Состояние напряжения в точке тела тогда определяется всеми векторами напряжений T ( н ) связан со всеми плоскостями (бесконечное число), которые проходят через эту точку. [13] Однако, согласно фундаментальной теореме Коши , [11] также называемая теоремой Коши о напряжении , [1] просто зная векторы напряжения в трех взаимно перпендикулярных плоскостях, вектор напряжения в любой другой плоскости, проходящей через эту точку, можно найти с помощью уравнений преобразования координат.
Теорема о напряжении Коши утверждает, что существует тензорное поле второго порядка σ ( x , t), называемое тензором напряжений Коши, независимое от n , такое, что T является линейной функцией от n :
Из этого уравнения следует, что вектор напряжений T ( н ) в любой точке P континуума, связанного с плоскостью с нормальным единичным вектором n, можно выразить как функцию векторов напряжений на плоскостях, перпендикулярных осям координат, т. е. через компоненты σ ij тензора напряжений σ .
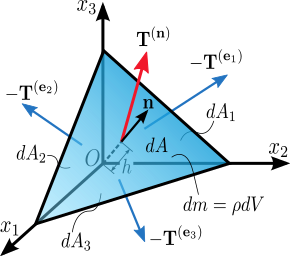
Чтобы доказать это выражение, рассмотрим тетраэдр с тремя гранями, ориентированными в координатных плоскостях, и с бесконечно малой площадью d A , ориентированной в произвольном направлении, заданном нормальным единичным вектором n (рис. 2.2). Тетраэдр образуется путем разрезания бесконечно малого элемента по произвольной плоскости с единичной нормалью n . Вектор напряжений на этой плоскости обозначается T ( н ) . Векторы напряжений, действующие на грани тетраэдра, обозначаются T ( е 1 ) , Т ( е2 ) и Т ( е 3 ) , и по определению являются компонентами σ ij тензора напряжений σ . Этот тетраэдр иногда называют тетраэдром Коши . Равновесие сил, т.е. первый закон движения Эйлера (второй закон движения Ньютона), дает:
Рисунок 2.2. Вектор напряжения, действующий на плоскость с нормальным единичным вектором n . Примечание к соглашению о знаках: Тетраэдр образуется разрезанием параллелепипеда по произвольной плоскости n . Итак, сила, действующая на плоскость n, является реакцией другой половины параллелепипеда и имеет противоположный знак.
где правая часть представляет собой произведение массы, заключенной в тетраэдре, и его ускорения: ρ — плотность, a — ускорение, h — высота тетраэдра, считая плоскость n основанием. Площадь граней тетраэдра, перпендикулярных осям, можно найти, проецируя d A на каждую грань (с помощью скалярного произведения):
а затем подставляя в уравнение, чтобы сократить d A :
Чтобы рассмотреть предельный случай, когда тетраэдр сжимается в точку, h должен стремиться к 0 (интуитивно плоскость n перемещается вдоль n в сторону O ). В результате правая часть уравнения приближается к 0, поэтому
Если предположить, что материальный элемент (см. рисунок вверху страницы) имеет плоскости, перпендикулярные осям координат декартовой системы координат, векторы напряжений, связанные с каждой из плоскостей элемента, т. е. T ( е 1 ) , Т ( е2 ) и Т ( е 3 ) можно разложить на нормальную составляющую и две сдвиговые составляющие, т.е. составляющие в направлении трех координатных осей. Для частного случая поверхности с нормальным единичным вектором, ориентированным в направлении оси x 1 , обозначим нормальное напряжение как σ 11 , а два касательных напряжения как σ 12 и σ 13 :
В индексной записи это
Девять компонентов σ ij векторов напряжений являются компонентами декартова тензора второго порядка, называемого тензором напряжений Коши , который можно использовать для полного определения состояния напряжения в точке и определяется выражением
где σ11 а , σ22 и и σ33 напряжения σ12 , σ13 σ32 , σ21 , , σ23 нормальные , σ31 — . — касательные напряжения Первый индекс i указывает, что напряжение действует в плоскости, нормальной к оси X i , а второй индекс j обозначает направление, в котором действует напряжение (Например, σ 12 подразумевает, что напряжение действует в плоскости, которая нормально к 1 -й оси, т.е. X 1 и действует вдоль 2 -й оси, т.е. X 2 ). Компонент напряжения является положительным, если он действует в положительном направлении координатных осей и если плоскость, на которой он действует, имеет вектор внешней нормали, указывающий в положительном направлении координат.
Таким образом, используя компоненты тензора напряжений
Обозначение Фойгта широко используется для представления отношений напряжение-деформация в механике твердого тела, а также для повышения эффективности вычислений в программном обеспечении численной механики конструкций.
Можно показать, что тензор напряжений является контравариантным тензором второго порядка, что является выражением того, как он преобразуется при изменении системы координат. Из x i -системы в x i ' -систему компоненты σ ij в исходной системе преобразуются в компоненты σ ij ' в новой системе по правилу тензорного преобразования (рис. 2.4):
Величина нормальной составляющей напряжения σ n любого вектора напряжений T ( н ) действующий на произвольной плоскости с нормальным единичным вектором n в данной точке, через компоненты σij тензора напряжений σ , представляет собой скалярное произведение вектора напряжения и нормального единичного вектора:
Величину составляющей напряжения сдвига τ n , действующей ортогонально вектору n , можно затем найти с помощью теоремы Пифагора :
Согласно принципу сохранения импульса , если сплошное тело находится в статическом равновесии, можно показать, что компоненты тензора напряжений Коши в каждой материальной точке тела удовлетворяют уравнениям равновесия:
Consider a continuum body (see Figure 4) occupying a volume , having a surface area , with defined traction or surface forces per unit area acting on every point of the body surface, and body forces per unit of volume on every point within the volume . Thus, if the body is in equilibrium the resultant force acting on the volume is zero, thus:
Согласно принципу сохранения углового момента , равновесие требует, чтобы сумма моментов по отношению к произвольной точке была равна нулю, что приводит к выводу, что тензор напряжений симметричен , имея, таким образом, только шесть независимых компонент напряжений вместо исходного. девять:
Вывод симметрии тензора напряжений
Summing moments about point O (Figure 4) the resultant moment is zero as the body is in equilibrium. Thus,
where is the position vector and is expressed as
Knowing that and using Gauss's divergence theorem to change from a surface integral to a volume integral, we have
The second integral is zero as it contains the equilibrium equations. This leaves the first integral, where , therefore
For an arbitrary volume V, we then have
which is satisfied at every point within the body. Expanding this equation we have
, , and
or in general
This proves that the stress tensor is symmetric
Однако при наличии парных напряжений, т.е. моментов на единицу объема, тензор напряжений несимметричен. Это также имеет место, когда число Кнудсена близко к единице: , или континуум представляет собой неньютоновскую жидкость, что может привести к неинвариантным во вращении жидкостям, таким как полимеры .
Напряженные компоненты на 2D вращающемся элементе . Пример того, как изменяются компоненты напряжений на гранях (краях) прямоугольного элемента при изменении угла его ориентации. Главные напряжения возникают, когда касательные напряжения одновременно исчезают со всех граней. Ориентация, при которой это происходит, дает основные направления . В этом примере, когда прямоугольник горизонтален, напряжения определяются выражением
В каждой точке напряженного тела имеется не менее трех плоскостей, называемых главными плоскостями , с векторами нормалей. , называемые главными направлениями , где соответствующий вектор напряжения перпендикулярен плоскости, т. е. параллелен или в том же направлении, что и вектор нормали. , и где нет нормальных касательных напряжений . Три напряжения, нормальные к этим главным плоскостям, называются главными напряжениями .
Компоненты тензора напряжений зависят от ориентации системы координат в рассматриваемой точке. Однако сам тензор напряжений является физической величиной и поэтому не зависит от системы координат, выбранной для его представления. С каждым тензором связаны определенные инварианты , которые также не зависят от системы координат. Например, вектор — это простой тензор первого ранга. В трех измерениях он состоит из трех компонентов. Значение этих компонентов будет зависеть от системы координат, выбранной для представления вектора, но величина вектора является физической величиной (скаляром) и не зависит от декартовой системы координат, выбранной для представления вектора (при условии, что она нормальный ). Аналогично, каждый тензор второго ранга (например, тензоры напряжений и деформаций) имеет три связанные с ним независимые инвариантные величины. Одним из наборов таких инвариантов являются главные напряжения тензора напряжений, которые являются не чем иным, как собственными значениями тензора напряжений. Их векторы направления являются главными направлениями или собственные векторы .
где является константой пропорциональности и в данном конкретном случае соответствует величинам векторов нормальных напряжений или главных напряжений.
Зная это и , у нас есть
Это однородная система , т.е. равная нулю, трех линейных уравнений, где являются неизвестными. Чтобы получить нетривиальное (ненулевое) решение для , определительная матрица коэффициентов должна быть равна нулю, т.е. система сингулярна. Таким образом,
Расширение определителя приводит к характеристическому уравнению
где
Характеристическое уравнение имеет три действительных корня , т.е. не мнимый из-за симметрии тензора напряжений. , и , – главные напряжения, функции собственных значений . Собственные значения являются корнями характеристического многочлена . Главные напряжения уникальны для данного тензора напряжений. Следовательно, из характеристического уравнения коэффициенты , и , называемые первым, вторым и третьим инвариантами напряжений соответственно, всегда имеют одно и то же значение независимо от ориентации системы координат.
Для каждого собственного значения существует нетривиальное решение в уравнении . Эти решения представляют собой главные направления или собственные векторы, определяющие плоскость, в которой действуют главные напряжения. Главные напряжения и главные направления характеризуют напряжение в точке и не зависят от ориентации.
Система координат с осями, ориентированными по главным направлениям, предполагает, что нормальные напряжения являются главными напряжениями, а тензор напряжений представляется диагональной матрицей:
Главные напряжения можно комбинировать, образуя инварианты напряжений: , , и . Первый и третий инварианты являются соответственно следом и определителем тензора напряжений. Таким образом,
Благодаря своей простоте главная система координат часто бывает полезна при рассмотрении состояния упругой среды в конкретной точке. Главные напряжения часто выражаются в следующем уравнении для оценки напряжений в направлениях x и y или осевых и изгибающих напряжений на детали. [14] : стр.58–59 Затем основные нормальные напряжения можно использовать для расчета напряжения фон Мизеса и, в конечном итоге, коэффициента безопасности и запаса прочности.
Используя только часть уравнения под квадратным корнем , вы получите максимальное и минимальное напряжение сдвига для плюса и минуса. Это показано как:
Максимальное напряжение сдвига или максимальное главное главное напряжение сдвига равно половине разницы между наибольшим и наименьшим главными напряжениями и действует в плоскости, делящей пополам угол между направлениями наибольшего и наименьшего главных напряжений, т. е. плоскости максимальное касательное напряжение ориентировано от плоскостей главных напряжений. Максимальное напряжение сдвига выражается как
Предполагая затем
Когда тензор напряжений не равен нулю, нормальная составляющая напряжения, действующая на плоскость при максимальном сдвиговом напряжении, отлична от нуля и равна
The normal stress can be written in terms of principal stresses as
Knowing that , the shear stress in terms of principal stresses components is expressed as
The maximum shear stress at a point in a continuum body is determined by maximizing subject to the condition that
This is a constrained maximization problem, which can be solved using the Lagrangian multiplier technique to convert the problem into an unconstrained optimization problem. Thus, the stationary values (maximum and minimum values)of occur where the gradient of is parallel to the gradient of .
The Lagrangian function for this problem can be written as
where is the Lagrangian multiplier (which is different from the use to denote eigenvalues).
The extreme values of these functions are
thence
These three equations together with the condition may be solved for and
By multiplying the first three equations by and , respectively, and knowing that we obtain
Adding these three equations we get
this result can be substituted into each of the first three equations to obtain
Doing the same for the other two equations we have
A first approach to solve these last three equations is to consider the trivial solution . However, this option does not fulfill the constraint .
Considering the solution where and , it is determine from the condition that , then from the original equation for it is seen that .The other two possible values for can be obtained similarly by assuming
and
and
Thus, one set of solutions for these four equations is:
These correspond to minimum values for and verifies that there are no shear stresses on planes normal to the principal directions of stress, as shown previously.
A second set of solutions is obtained by assuming and . Thus we have
To find the values for and we first add these two equations
Knowing that for
and
we have
and solving for we have
Then solving for we have
and
The other two possible values for can be obtained similarly by assuming
and
and
Therefore, the second set of solutions for , representing a maximum for is
Therefore, assuming , the maximum shear stress is expressed by
and it can be stated as being equal to one-half the difference between the largest and smallest principal stresses, acting on the plane that bisects the angle between the directions of the largest and smallest principal stresses.
Тензор напряжений можно выразить как сумму двух других тензоров напряжений:
тензор средний гидростатических напряжений , или тензор объемных напряжений , или средний тензор нормальных напряжений , , имеющая тенденцию к изменению объема нагруженного тела; и
девиаторная составляющая, называемая тензором девиатора напряжений , , что имеет тенденцию искажать его.
Так
где среднее напряжение, определяемое формулой
Давление ( ) обычно определяется как отрицательная одна треть следа тензора напряжений за вычетом любого напряжения, которому способствует дивергенция скорости, т.е.
Поскольку это тензор второго порядка, тензор девиатора напряжений также имеет набор инвариантов , которые можно получить с помощью той же процедуры, которая используется для расчета инвариантов тензора напряжений. Можно показать, что главные направления тензора девиатора напряжений совпадают с главными направлениями тензора напряжений . Таким образом, характеристическое уравнение имеет вид
где , и – первый, второй и третий девиаторные инварианты напряжений соответственно. Их значения одинаковы (инвариантны) независимо от ориентации выбранной системы координат. Эти девиаторные инварианты напряжений могут быть выражены как функции компонентов или его основные ценности , , и или, альтернативно, как функция или его основные ценности , , и . Таким образом,
Потому что тензор девиатора напряжений находится в состоянии чистого сдвига.
величина, называемая эквивалентным напряжением или напряжением фон Мизеса В механике твердого тела обычно используется . Эквивалентное напряжение определяется как
Рассматривая главные направления в качестве осей координат, плоскость, нормальный вектор которой составляет равные углы с каждой из главных осей (т.е. имеющая направляющие косинусы, равные ) называется октаэдрической плоскостью . Всего имеется восемь октаэдрических плоскостей (рис. 6). Нормальные и сдвиговые компоненты тензора напряжений на этих плоскостях называются октаэдрическими нормальными напряжениями. и октаэдрическое напряжение сдвига , соответственно. Октаэдрическая плоскость, проходящая через начало координат, известна как π-плоскость ( π не путать со средним напряжением, обозначенным π в разделе выше) . На -плоскости π .
Зная, что тензор напряжений точки О (рис. 6) в главных осях равен
тогда вектор напряжения на октаэдрической плоскости определяется выражением:
Нормальная составляющая вектора напряжения в точке О, связанная с октаэдрической плоскостью, равна
что является средним нормальным напряжением или гидростатическим напряжением. Это значение одинаково во всех восьми октаэдрических плоскостях.Тогда напряжение сдвига в октаэдрической плоскости равно
Arc.Ask3.Ru Номер скриншота №: a4fc499e53f4922a00c0f907cfb17942__1718259480 URL1:https://arc.ask3.ru/arc/aa/a4/42/a4fc499e53f4922a00c0f907cfb17942.html Заголовок, (Title) документа по адресу, URL1: Cauchy stress tensor - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)















































![{\displaystyle {\boldsymbol {\sigma }}=\sigma _{ij}=\left[{\begin{matrix}\mathbf {T} ^{(\mathbf {e} _{1})}\\\ mathbf {T} ^{(\mathbf {e} _{2})}\\\mathbf {T} ^{(\mathbf {e} _{3})}\\\end{matrix}}\right] =\left[{\begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{22}&\sigma _{ 23}\\\sigma _{31}&\sigma _{32}&\sigma _{33}\\\end{matrix}}\right]\equiv \left[{\begin{matrix}\sigma _{ xx}&\sigma _{xy}&\sigma _{xz}\\\sigma _{yx}&\sigma _{yy}&\sigma _{yz}\\\sigma _{zx}&\sigma _ {zy}&\sigma _{zz}\\\end{matrix}}\right]\equiv \left[{\begin{matrix}\sigma _{x}&\tau _{xy}&\tau _{ xz}\\\tau _{yx}&\sigma _{y}&\tau _{yz}\\\tau _{zx}&\tau _{zy}&\sigma _{z}\\\end {матрица}}\вправо],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b80798aa935ba1fff304659fd337b186c98807d)


![{\displaystyle \left[{\begin{matrix}T_{1}^{(\mathbf {n})}&T_{2}^{(\mathbf {n})}&T_{3}^{(\mathbf { n} )}\end{matrix}}\right]=\left[{\begin{matrix}n_{1}&n_{2}&n_{3}\end{matrix}}\right]\cdot \left[{ \begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{22}&\sigma _{23}\\\ сигма _{31}&\sigma _{32}&\sigma _{33}\\\end{matrix}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8560fd0237cab052b95b2fc45b004b5939e2fdd6)


![{\displaystyle \left[{\begin{matrix}\sigma '_{11}&\sigma '_{12}&\sigma '_{13}\\\sigma '_{21}&\sigma '_{ 22}&\sigma '_{23}\\\sigma '_{31}&\sigma '_{32}&\sigma '_{33}\\\end{matrix}}\right]=\left[ {\begin{matrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33}\\\end {matrix}}\right]\left[{\begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{22 }&\sigma _{23}\\\sigma _{31}&\sigma _{32}&\sigma _{33}\\\end{matrix}}\right]\left[{\begin{matrix} a_{11}&a_{21}&a_{31}\\a_{12}&a_{22}&a_{32}\\a_{13}&a_{23}&a_{33}\\\end{matrix}}\right ].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b8e97b908a7aef59c1dee8f237aea2ff1502d32b)































![{\displaystyle \left[{\begin{matrix}\sigma _{11}&\sigma _{12}\\\sigma _{21}&\sigma _{22}\end{matrix}}\right]= \left[{\begin{matrix}-10&10\\10&15\end{matrix}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c842dd4bd9c9055860c6c6ec3ef52637fd8cef89)









![{\displaystyle {\begin{aligned}I_{1}&=\sigma _{11}+\sigma _{22}+\sigma _{33}\\&=\sigma _{kk}={\text{ tr}}({\boldsymbol {\sigma }})\\[4pt]I_{2}&={\begin{vmatrix}\sigma _{22}&\sigma _{23}\\\sigma _{32 }&\sigma _{33}\\\end{vmatrix}}+{\begin{vmatrix}\sigma _{11}&\sigma _{13}\\\sigma _{31}&\sigma _{33 }\\\end{vmatrix}}+{\begin{vmatrix}\sigma _{11}&\sigma _{12}\\\sigma _{21}&\sigma _{22}\\\end{vmatrix }}\\&=\sigma _{11}\sigma _{22}+\sigma _{22}\sigma _{33}+\sigma _{11}\sigma _{33}-\sigma _{12 }^{2}-\sigma _{23}^{2}-\sigma _{31}^{2}\\&={\frac {1}{2}}\left(\sigma _{ii} \sigma _{jj}-\sigma _{ij}\sigma _{ji}\right)={\frac {1}{2}}\left[\left({\text{tr}}({\boldsymbol {\sigma }})\right)^{2}-{\text{tr}}\left({\boldsymbol {\sigma }}^{2}\right)\right]\\[4pt]I_{3 }&=\det(\sigma _{ij})=\det({\boldsymbol {\sigma }})\\&=\sigma _{11}\sigma _{22}\sigma _{33}+2 \sigma _{12}\sigma _{23}\sigma _{31}-\sigma _{12}^{2}\sigma _{33}-\sigma _{23}^{2}\sigma _{ 11}-\sigma _{31}^{2}\sigma _{22}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b969b2ddfebc4820ea1a54fa0be422e95cc6eeb)




















![{\displaystyle {\begin{aligned}\tau _{\text{n}}^{2}&=\left(T^{(n)}\right)^{2}-\sigma _{\text{n}}^{2}\\&=\sigma _{1}^{2}n_{1}^{2}+\sigma _{2}^{2}n_{2}^{2}+\sigma _{3}^{2}n_{3}^{2}-\left(\sigma _{1}n_{1}^{2}+\sigma _{2}n_{2}^{2}+\sigma _{3}n_{3}^{2}\right)^{2}\\&=\left(\sigma _{1}^{2}-\sigma _{2}^{2}\right)n_{1}^{2}+\left(\sigma _{2}^{2}-\sigma _{3}^{2}\right)n_{2}^{2}+\sigma _{3}^{2}-\left[\left(\sigma _{1}-\sigma _{3}\right)n_{1}^{2}+\left(\sigma _{2}-\sigma _{3}\right)n_{2}^{2}+\sigma _{3}\right]^{2}\\&=(\sigma _{1}-\sigma _{2})^{2}n_{1}^{2}n_{2}^{2}+(\sigma _{2}-\sigma _{3})^{2}n_{2}^{2}n_{3}^{2}+(\sigma _{1}-\sigma _{3})^{2}n_{1}^{2}n_{3}^{2}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a535f8bf2c0d25666c5bba4154e51d8e3f18769b)

















![{\displaystyle {\begin{aligned}\left[n_{1}^{2}\sigma _{1}^{2}+n_{2}^{2}\sigma _{2}^{2}+n_{3}^{2}\sigma _{3}^{2}\right]-2\left(\sigma _{1}n_{1}^{2}+\sigma _{2}n_{2}^{2}+\sigma _{3}n_{3}^{2}\right)\sigma _{\mathrm {n} }+\lambda \left(n_{1}^{2}+n_{2}^{2}+n_{3}^{2}\right)&=0\\\left[\tau _{\mathrm {n} }^{2}+\left(\sigma _{1}n_{1}^{2}+\sigma _{2}n_{2}^{2}+\sigma _{3}n_{3}^{2}\right)^{2}\right]-2\sigma _{\mathrm {n} }^{2}+\lambda &=0\\\left[\tau _{\mathrm {n} }^{2}+\sigma _{\mathrm {n} }^{2}\right]-2\sigma _{\mathrm {n} }^{2}+\lambda &=0\\\lambda &=\sigma _{\mathrm {n} }^{2}-\tau _{\mathrm {n} }^{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/435843df946acb6203b414aa916239bb299bd72d)











































![{\displaystyle {\begin{aligned}s_{ij} &=\sigma _{ij}-{\frac {\sigma _{kk}}{3}}\delta _{ij},\,\\\left [{\begin{matrix}s_{11}&s_{12}&s_{13}\\s_{21}&s_{22}&s_{23}\\s_{31}&s_{32}&s_{33}\end{ матрица}}\right]&=\left[{\begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{ 22}&\sigma _{23}\\\sigma _{31}&\sigma _{32}&\sigma _{33}\end{matrix}}\right]-\left[{\begin{matrix} \pi &0&0\\0&\pi &0\\0&0&\pi \end{matrix}}\right]\\&=\left[{\begin{matrix}\sigma _{11}-\pi &\sigma _{ 12}&\sigma _{13}\\\sigma _{21}&\sigma _{22}-\pi &\sigma _{23}\\\sigma _{31}&\sigma _{32}& \sigma _{33}-\pi \end{matrix}}\right].\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dce1e7903eacf6a01d8ed5ee553b176079eaa393)










![{\displaystyle {\begin{aligned}J_{1}&=s_{kk}=0,\\[3pt]J_{2}&={\frac {1}{2}}s_{ij}s_{ji }={\frac {1}{2}}\operatorname {tr} \left({\boldsymbol {s}}^{2}\right)\\&={\frac {1}{2}}\left (s_{1}^{2}+s_{2}^{2}+s_{3}^{2}\right)\\&={\frac {1}{6}}\left[(\sigma _{11}-\sigma _{22})^{2}+(\sigma _{22}-\sigma _{33})^{2}+(\sigma _{33}-\sigma _{11 })^{2}\right]+\sigma _{12}^{2}+\sigma _{23}^{2}+\sigma _{31}^{2}\\&={\frac { 1}{6}}\left[(\sigma _{1}-\sigma _{2})^{2}+(\sigma _{2}-\sigma _{3})^{2}+( \sigma _{3}-\sigma _{1})^{2}\right]\\&={\frac {1}{3}}I_{1}^{2}-I_{2}={ \frac {1}{2}}\left[\operatorname {tr} \left({\boldsymbol {\sigma }}^{2}\right)-{\frac {1}{3}}\operatorname {tr } ({\boldsymbol {\sigma }})^{2}\right],\\[3pt]J_{3}&=\det(s_{ij})\\&={\frac {1}{3 }}s_{ij}s_{jk}s_{ki}={\frac {1}{3}}{\text{tr}}\left({\boldsymbol {s}}^{3}\right)\ \&={\frac {1}{3}}\left(s_{1}^{3}+s_{2}^{3}+s_{3}^{3}\right)\\&=s_ {1}s_{2}s_{3}\\&={\frac {2}{27}}I_{1}^{3}-{\frac {1}{3}}I_{1}I_{ 2}+I_{3}={\frac {1}{3}}\left[{\text{tr}}({\boldsymbol {\sigma }}^{3})-\operatorname {tr} \left ({\boldsymbol {\sigma }}^{2}\right)\operatorname {tr} ({\boldsymbol {\sigma }})+{\frac {2}{9}}\operatorname {tr} ({\ жирный символ {\sigma }})^{3}\right].\,\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf3225a2dae9a8c27b8d713bcd32584e15b611ea)

![{\displaystyle \sigma _{\text{vM}}={\sqrt {3\,J_{2}}}={\sqrt {{\frac {1}{2}}~\left[(\sigma _ {1}-\sigma _{2})^{2}+(\sigma _{2}-\sigma _{3})^{2}+(\sigma _{3}-\sigma _{1} )^{2}\right]}}\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fa6ede9bfaa3a25ee197f8971b4c8f5b0b94b0e)







![{\displaystyle {\begin{aligned}\tau _{\text{oct}}&={\sqrt {T_{i}^{(n)}T_{i}^{(n)}-\sigma _{ \text{oct}}^{2}}}\\&=\left[{\frac {1}{3}}\left(\sigma _{1}^{2}+\sigma _{2}^ {2}+\sigma _{3}^{2}\right)-{\frac {1}{9}}(\sigma _{1}+\sigma _{2}+\sigma _{3}) ^{2}\right]^{\frac {1}{2}}\\&={\frac {1}{3}}\left[(\sigma _{1}-\sigma _{2}) ^{2}+(\sigma _{2}-\sigma _{3})^{2}+(\sigma _{3}-\sigma _{1})^{2}\right]^{\ frac {1}{2}}={\frac {1}{3}}{\sqrt {2I_{1}^{2}-6I_{2}}}={\sqrt {{\frac {2} 3}}J_{2}}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62e0e2d5f528010c0bf4dab5db94572d2ea10f9a)
![{\displaystyle \left[{\begin{matrix}T_{1}^{(\mathbf {e})}&T_{2}^{(\mathbf {e})}&T_{3}^{(\mathbf { e} )}\end{matrix}}\right]=\left[{\begin{matrix}e_{1}&e_{2}&e_{3}\end{matrix}}\right]\cdot \left[{ \begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{22}&\sigma _{23}\\\ сигма _{31}&\sigma _{32}&\sigma _{33}\\\end{matrix}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2adec62e9f25fc4de128510ed5817022dcd61d6d)