Евклидов вектор

В математике , физике и технике или евклидов вектор просто вектор (иногда называемый геометрическим вектором) . [1] или пространственный вектор [2] ) — геометрический объект, имеющий величину (или длину ) и направление . Евклидовы векторы можно складывать и масштабировать для формирования векторного пространства . Евклидов вектор часто изображается в виде направленного отрезка линии или графически в виде стрелки, соединяющей точку А с конечной точкой В. начальную [3] и обозначается

Вектор — это то, что нужно, чтобы «перенести» точку А в точку Б ; латинское слово вектор означает «носитель». [4] Впервые его использовали астрономы XVIII века, исследующие вращение планет вокруг Солнца. [5] Величина вектора — это расстояние между двумя точками, а направление — это смещения от A до B. направление Многие алгебраические операции над действительными числами, такие как сложение , вычитание , умножение и отрицание , имеют близкие аналоги для векторов. [6] операции, подчиняющиеся известным алгебраическим законам коммутативности , ассоциативности и дистрибутивности . Эти операции и связанные с ними законы квалифицируют евклидовы векторы как пример более обобщенной концепции векторов, определяемых просто как элементы векторного пространства .
Векторы играют важную роль в физике : скорость и ускорение движущегося объекта, а также действующие на него силы можно описать векторами. [7] Многие другие физические величины можно рассматривать как векторы. Хотя большинство из них не представляют расстояния (за исключением, например, положения или смещения ), их величину и направление все же можно представить длиной и направлением стрелки. Математическое представление физического вектора зависит от системы координат, используемой для его описания. К другим вектороподобным объектам, описывающим физические величины и аналогичным образом преобразующимся при изменении системы координат, относятся псевдовекторы и тензоры . [8]
История
[ редактировать ]Концепция вектора, известная сегодня, является результатом постепенного развития, продолжавшегося более 200 лет. Около дюжины человек внесли значительный вклад в его развитие. [9] В 1835 году Джусто Беллавитис абстрагировал основную идею, когда разработал концепцию равновесия . Работая на евклидовой плоскости, он сделал равноценной любую пару параллельных отрезков одинаковой длины и ориентации. По сути, он реализовал отношение эквивалентности для пар точек (двух точек) на плоскости и, таким образом, создал первое пространство векторов на плоскости. [9] : 52–4 Термин вектор был введен Уильямом Роуэном Гамильтоном как часть кватерниона , который представляет собой сумму q = s + v действительного числа s (также называемого скаляром ) и трехмерного вектора . Как и Беллавитис, Гамильтон рассматривал векторы как представителей классов равнонаправленных сегментов. Поскольку комплексные числа используют мнимую единицу для дополнения действительной линии , Гамильтон считал вектор v кватерниона мнимой частью : [10]
Алгебраически мнимая часть, геометрически построенная в виде прямой линии или радиус-вектора, которая, вообще говоря, имеет для каждого определенного кватерниона определенную длину и определенное направление в пространстве, может быть названа векторной частью или просто вектором кватернион.
Некоторые другие математики разработали векторные системы в середине девятнадцатого века, в том числе Огюстен Коши , Герман Грассман , Август Мёбиус , граф де Сен-Венан и Мэтью О'Брайен . Работа Грассмана 1840 года Theorie der Ebbe und Flut (Теория приливов и отливов) была первой системой пространственного анализа, которая похожа на сегодняшнюю систему и содержала идеи, соответствующие векторному произведению, скалярному произведению и векторному дифференцированию. Работа Грассмана в значительной степени игнорировалась до 1870-х годов. [9] Питер Гатри Тейт принял стандарт кватернионов после Гамильтона. Его «Элементарный трактат о кватернионах» 1867 года включал подробное рассмотрение оператора набла или дель ∇. В 1878 году «Элементы динамики» опубликовал книгу Уильям Кингдон Клиффорд . Клиффорд упростил исследование кватернионов, изолировав скалярное произведение и векторное произведение двух векторов от полного произведения кватернионов. Этот подход сделал векторные вычисления доступными для инженеров и других специалистов, работающих в трех измерениях и скептически относящихся к четвертому.
Джозайя Уиллард Гиббс , который познакомился с кватернионами через Джеймса Клерка Максвелла , «Трактат об электричестве и магнетизме» выделил их векторную часть для независимого рассмотрения. Первая половина книги Гиббса «Элементы векторного анализа» , опубликованной в 1881 году, представляет собой, по сути, современную систему векторного анализа. [9] [6] В 1901 году Эдвин Бидвелл Уилсон опубликовал «Векторный анализ» , адаптированный на основе лекций Гиббса, который исключил любое упоминание кватернионов при разработке векторного исчисления.
Обзор
[ редактировать ]В физике и технике вектор обычно рассматривается как геометрическая сущность, характеризующаяся величиной и направлением. Формально он определяется как направленный отрезок прямой или стрелка в евклидовом пространстве . [11] В чистой математике вектор определяется в более общем смысле как любой элемент векторного пространства . В этом контексте векторы представляют собой абстрактные объекты, которые могут характеризоваться или не характеризоваться величиной и направлением. Это обобщенное определение подразумевает, что вышеупомянутые геометрические объекты представляют собой особый вид векторов, поскольку они являются элементами особого вида векторного пространства, называемого евклидовым пространством . Эта конкретная статья посвящена векторам, строго определенным как стрелки в евклидовом пространстве. Когда возникает необходимость отличить эти специальные векторы от векторов, определенных в чистой математике, их иногда называют геометрическими , пространственными или евклидовыми векторами.
Будучи стрелкой, евклидов вектор имеет определенную начальную и конечную точки . Вектор с фиксированными начальной и конечной точками называется связанным вектором . [12] Когда имеют значение только величина и направление вектора, то конкретная начальная точка не имеет значения, и вектор называется свободным вектором . Таким образом, две стрелки и в пространстве представляют один и тот же свободный вектор, если они имеют одинаковую величину и направление: то есть они равноправны , если четырехугольник ABB'A' является параллелограммом . Если евклидово пространство снабжено возможностью выбора начала координат , то свободный вектор эквивалентен связанному вектору той же величины и направления, начальной точкой которого является начало координат. Термин «вектор» также имеет обобщения на более высокие измерения и на более формальные подходы с гораздо более широким применением.


Дополнительная информация
[ редактировать ]Возможно, этот раздел необходимо почистить. Он был объединен с Vector (математика и физика)#Векторы в евклидовой геометрии . |
В классической евклидовой геометрии (т. е. синтетической геометрии ) векторы были введены (в течение 19 века) как классы эквивалентности при равновесии упорядоченных пар точек; две пары ( A , B ) и ( C , D ) равноправны, если точки A , B , D , C в этом порядке образуют параллелограмм . Такой класс эквивалентности называется вектором , точнее, евклидовым вектором. [13] Класс эквивалентности ( A , B ) часто обозначается

Таким образом, евклидов вектор представляет собой класс эквивалентности направленных отрезков с одинаковой величиной (например, длиной отрезка прямой ( A , B ) ) и одинаковым направлением (например, направлением от A к B ). [14] В физике евклидовы векторы используются для представления физических величин, которые имеют как величину, так и направление, но не расположены в определенном месте, в отличие от скаляров , которые не имеют направления. [7] Например, скорость , силы и ускорение представлены векторами.
В современной геометрии евклидовы пространства часто определяются на основе линейной алгебры . Точнее, евклидово пространство E определяется как множество, с которым связано пространство внутреннего произведения конечной размерности над действительными числами. и действие аддитивной группы групповое которое является свободным и транзитивным ( см. В Аффинном пространстве подробнее об этой конструкции ). Элементы называются переводами . Было доказано, что два определения евклидовых пространств эквивалентны и что классы эквивалентности при равновесии можно отождествлять с трансляциями.


Иногда евклидовы векторы рассматриваются без привязки к евклидову пространству. В этом случае евклидов вектор — это элемент нормированного векторного пространства конечной размерности над действительными числами или, как правило, элемент оснащен скалярным произведением . Это имеет смысл, поскольку сложение в таком векторном пространстве действует свободно и транзитивно на само векторное пространство. То есть, является евклидовым пространством, в котором оно является ассоциированным векторным пространством, а скалярное произведение — скалярным произведением.

Евклидово пространство часто представляется как евклидово пространство размерности n . Это мотивировано тем, что каждое евклидово пространство размерности изоморфно евклидову n пространству Точнее, учитывая такое евклидово пространство, выбрать любую точку О. в качестве начала координат можно С помощью процесса Грама – Шмидта можно также найти ортонормированный базис соответствующего векторного пространства (базис, в котором скалярное произведение двух базисных векторов равно 0, если они разные, и 1, если они равны). Это определяет декартовы координаты любой точки P пространства, как координаты на этой основе вектора Эти варианты определяют изоморфизм данного евклидова пространства на путем сопоставления любой точки с n -кортежом ее декартовых координат и каждого вектора с его координатным вектором .



Примеры в одном измерении
[ редактировать ]физиков Поскольку концепция силы имеет направление и величину, ее можно рассматривать как вектор. В качестве примера рассмотрим направленную вправо силу F, равную 15 ньютонов . Если положительная ось также направлена вправо, то F представлена вектором 15 Н, а если положительная ось направлена влево, то вектор для F равен -15 Н. В любом случае величина вектора равна 15 Н. Аналогично, векторное представление смещения Δ s на 4 метра будет равно 4 м или -4 м, в зависимости от его направления, а его величина независимо от этого будет равна 4 м.
В физике и технике
[ редактировать ]Векторы имеют фундаментальное значение в физических науках. Их можно использовать для представления любой величины, имеющей величину, направление и подчиняющейся правилам сложения векторов. Примером может служить скорость , величина которой равна скорости . Например, скорость 5 метров в секунду вверх может быть представлена вектором (0, 5) (в двух измерениях с положительной осью Y как «вверх»). Другая величина, представленная вектором, — это сила , поскольку она имеет величину и направление и подчиняется правилам сложения векторов. [7] Векторы также описывают многие другие физические величины, такие как линейное перемещение, смещение , линейное ускорение, угловое ускорение , линейный момент и угловой момент . Другие физические векторы, такие как электрическое и магнитное поле , представлены как система векторов в каждой точке физического пространства; то есть векторное поле . Примерами величин, которые имеют величину и направление, но не подчиняются правилам сложения векторов, являются угловое смещение и электрический ток. Следовательно, это не векторы.
В декартовом пространстве
[ редактировать ]В декартовой системе координат связанный вектор можно представить, указав координаты его начальной и конечной точки. Например, точки A = (1, 0, 0) и B = (0, 1, 0) в пространстве определяют связанный вектор указывающий из точки x = 1 на оси x в точку y = 1 на оси y .

В декартовых координатах свободный вектор можно рассматривать как соответствующий связанный вектор, в этом смысле начальная точка которого имеет координаты начала координат O = (0, 0, 0) . Затем он определяется координатами конечной точки связанного вектора. Таким образом, свободный вектор, представленный (1, 0, 0), представляет собой вектор единичной длины, направленный в направлении положительной оси x .
Такое координатное представление свободных векторов позволяет выразить их алгебраические характеристики в удобной числовой форме. Например, сумма двух (свободных) векторов (1, 2, 3) и (−2, 0, 4) представляет собой (свободный) вектор

Евклидовы и аффинные векторы
[ редактировать ]В геометрических и физических параметрах иногда можно естественным образом связать с векторами длину или величину и направление. Кроме того, понятие направления строго связано с понятием угла между двумя векторами. Если определено скалярное произведение двух векторов — скалярное произведение двух векторов — тогда также можно определить длину; скалярное произведение дает удобную алгебраическую характеристику как угла (функция скалярного произведения между любыми двумя ненулевыми векторами), так и длины (квадратный корень из скалярного произведения вектора самого по себе). В трех измерениях также можно определить векторное произведение , которое дает алгебраическую характеристику площади и ориентации в пространстве параллелограмма , определяемого двумя векторами (используемыми в качестве сторон параллелограмма). В любом измерении (и, в частности, в более высоких измерениях) можно определить внешнее произведение , которое (среди прочего) дает алгебраическую характеристику площади и ориентации в пространстве объекта. n -мерный параллелоэдр, заданный n векторами.
В псевдоевклидовом пространстве квадрат длины вектора может быть положительным, отрицательным или нулевым. Важным примером является пространство Минковского (которое важно для нашего понимания специальной теории относительности ).
Однако не всегда возможно или желательно определить длину вектора. Этот более общий тип пространственного вектора является предметом векторных пространств (для свободных векторов) и аффинных пространств (для связанных векторов, каждое из которых представлено упорядоченной парой «точек»). Один физический пример взят из термодинамики , где многие интересующие величины можно рассматривать как векторы в пространстве без понятия длины или угла. [15]
Обобщения
[ редактировать ]В физике, а также в математике вектор часто идентифицируется с набором компонентов или списком чисел, которые действуют как скалярные коэффициенты для набора базисных векторов . Когда базис трансформируется, например, путем вращения или растяжения, то компоненты любого вектора в терминах этого базиса также трансформируются в противоположном смысле. Сам вектор не изменился, но изменился базис, поэтому компоненты вектора должны измениться, чтобы компенсировать это. Вектор называется ковариантным или контравариантным , в зависимости от того, как преобразование компонент вектора связано с преобразованием базиса. В общем, контравариантные векторы — это «обычные векторы» с единицами измерения расстояния (например, смещения) или расстояния, умноженного на другую единицу измерения (например, скорость или ускорение); ковариантные векторы, с другой стороны, имеют единицы измерения на единицу расстояния, такие как градиент . При изменении единиц измерения (частный случай смены основы ) с метров на миллиметры, масштабный коэффициент 1/1000, смещение 1 м становится 1000 мм — контрвариантное изменение числового значения. Напротив, градиент 1 K /m становится 0,001 K/mm — ковариантное изменение значения (подробнее см. ковариантность и контравариантность векторов ). Тензоры — это еще один тип величин, который ведет себя подобным образом; вектор — это один из типов тензоров .
В чистой математике вектор — это любой элемент векторного пространства над некоторым полем , который часто представляется как координатный вектор . Векторы, описанные в этой статье, представляют собой особый случай этого общего определения, поскольку они контравариантны по отношению к окружающему пространству. Контравариантность отражает физическую интуицию, лежащую в основе идеи о том, что вектор имеет «величину и направление».
Представительства
[ редактировать ]
Векторы обычно обозначаются строчными буквами и жирным шрифтом, например: , и или строчным курсивом и жирным шрифтом, как в файле . ( заглавные обычно используются Для обозначения матриц буквы .) Другие соглашения включают в себя или , особенно в рукописном виде . В качестве альтернативы некоторые используют тильду (~) или волнистую линию подчеркивания под символом, например , что является соглашением для обозначения жирного шрифта. Если вектор представляет собой направленное расстояние или смещение от точки A до точки B (см. рисунок), его также можно обозначить как или АБ . В немецкой литературе было особенно распространено изображение векторов маленькими буквами -фрактурами , например: .







Векторы обычно изображаются на графиках или других схемах в виде стрелок (направленных отрезков линий ), как показано на рисунке. Здесь точка A называется началом координат , хвостом , базой или начальной точкой , а точка B называется головой , вершиной , конечной точкой , конечной точкой или конечной точкой . вектора Длина стрелки пропорциональна величине , а направление, в котором указывает стрелка, указывает направление вектора.

На двумерной диаграмме иногда желателен вектор, плоскости диаграммы перпендикулярный . Эти векторы обычно изображаются в виде маленьких кружков. Круг с точкой в центре (Unicode U+2299 ⊙) обозначает вектор, направленный из передней части диаграммы в сторону зрителя. Круг с вписанным в него крестом (Юникод U+2297 ⊗) обозначает вектор, указывающий внутрь диаграммы и за ней. Их можно рассматривать как наблюдение за наконечником стрелы и наблюдение за полетом стрелы сзади.

Для вычислений с векторами графическое представление может быть слишком громоздким. Векторы в n -мерном евклидовом пространстве можно представить как координатные векторы в декартовой системе координат . Конечную точку вектора можно определить с помощью упорядоченного списка из n действительных чисел ( n - tuple ). Эти числа являются координатами конечной точки вектора относительно заданной декартовой системы координат и обычно называются скалярными компонентами (или скалярными проекциями ) вектора на оси системы координат.
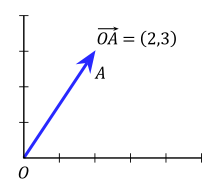
В качестве примера в двух измерениях (см. рисунок) вектор от начала координат O = (0, 0) до точки A = (2, 3) просто записывается как

Идея о том, что хвост вектора совпадает с началом координат, неявна и легко понятна. Таким образом, более явное обозначение обычно считается ненужным (и действительно редко используется).

В трехмерном евклидовом пространстве (или R 3 ), векторы отождествляются с тройками скалярных компонент: также написано,


Это можно обобщить на n-мерное евклидово пространство (или R н ).

Эти числа часто объединяются в вектор-столбец или вектор-строку , особенно при работе с матрицами , следующим образом:
![{\displaystyle \mathbf {a} = {\begin{bmatrix}a_{1}\\a_{2}\\a_{3}\\\end{bmatrix}}=[a_{1}\ a_{2} \ a_{3}]^{\operatorname {T} }.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a4d592431150c7ec8a51217d87dae2ed1224df2)
Другой способ представить вектор в n - измерениях — ввести стандартные базисные векторы. Например, в трёх измерениях их три: Они имеют интуитивную интерпретацию как векторы единичной длины, направленные вверх по x , y и z осям декартовой системы координат соответственно. С их точки зрения любой вектор a в R 3 можно выразить в виде:


или

где a 1 , a 2 , a 3 называются векторными компонентами (или векторными проекциями ) a на базисных векторах или, что то же самое, на соответствующих декартовых осях x , y и z (см. рисунок), а a 1 , a 2 , a 3 — соответствующие скалярные компоненты (или скалярные проекции).
Во вводных учебниках физики стандартные базисные векторы часто обозначаются вместо этого (или , в котором символ шляпы обычно обозначает единичные векторы ). В этом случае скалярная и векторная компоненты обозначаются соответственно a x , a y , a z и a x , a y , a z (обратите внимание на разницу, выделенную жирным шрифтом). Таким образом,




Обозначение e i совместимо с индексным обозначением и соглашением о суммировании, обычно используемым в математике, физике и технике более высокого уровня.
Разложение или разрешение
[ редактировать ]Как объяснялось выше , вектор часто описывается набором компонентов вектора, которые в сумме образуют данный вектор. Обычно эти компоненты представляют собой проекции вектора на набор взаимно перпендикулярных опорных осей (базисных векторов). Говорят, что вектор разложен или разрешен относительно этого набора.
Разложение или разрешение [16] Разложение вектора на компоненты не однозначно, так как зависит от выбора осей, на которые вектор проецируется.
Более того, использование декартовых единичных векторов, таких как в качестве основы для представления вектора не требуется. Векторы также могут быть выражены через произвольный базис, включая орты цилиндрической системы координат ( ) или сферической системе координат ( ). Последние два варианта более удобны для решения задач, обладающих цилиндрической или сферической симметрией соответственно.


Выбор базиса не влияет на свойства вектора и его поведение при преобразованиях.
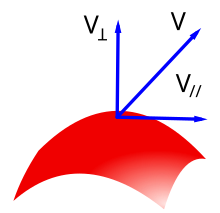
Вектор также может быть разбит на «нефиксированные» базисные векторы, которые меняют свою ориентацию в зависимости от времени или пространства. Например, вектор в трехмерном пространстве можно разложить по двум осям, соответственно нормальным и касательным к поверхности (см. рисунок). При этом радиальная и тангенциальная составляющие вектора относятся к радиусу вращения . объекта Первая параллельна радиусу, а вторая ортогональна ему. [17]
В этих случаях каждый из компонентов, в свою очередь, может быть разложен относительно фиксированной системы координат или базисного набора (например, глобальной системы координат или инерциальной системы отсчета ).
Основные свойства
[ редактировать ]В следующем разделе используется декартова система координат с базисными векторами. и предполагает, что все векторы имеют начало как общую базовую точку. Вектор a запишется как


Равенство
[ редактировать ]Два вектора называются равными, если они имеют одинаковую величину и направление. Эквивалентно они будут равны, если их координаты равны. Итак, два вектора и равны, если



Противоположные, параллельные и антипараллельные векторы.
[ редактировать ]Два вектора противоположны, если они имеют одинаковую величину, но противоположное направление . Итак, два вектора
и
противоположны, если

Два вектора параллельны , если они имеют одинаковое направление, но не обязательно одинаковую величину, или антипараллельны, если они имеют противоположное направление, но не обязательно одинаковую величину. [18]
Сложение и вычитание
[ редактировать ]Сумма a и b двух векторов может быть определена как называют результирующим вектором a b и Результирующий вектор иногда .

Сложение можно представить графически, поместив конец стрелки b на острие стрелки a , а затем нарисовав стрелку от хвоста a к острию b . Новая нарисованная стрелка представляет вектор a + b , как показано ниже: [7]

Этот метод сложения иногда называют правилом параллелограмма , поскольку a и b образуют стороны параллелограмма , а a + b — одна из диагоналей. Если a и b — связанные векторы, имеющие одну и ту же базовую точку, эта точка также будет базовой точкой a + b . Можно проверить геометрически, что a + b = b + a и ( a + b ) + c = a + ( b + c ).
Разница а и b равна

Вычитание двух векторов можно геометрически проиллюстрировать следующим образом: чтобы вычесть b из a , поместите хвосты a и b в одну и ту же точку, а затем нарисуйте стрелку от вершины b к вершине a . Эта новая стрелка представляет вектор (-b) + a , где (-b) является противоположностью b , см. рисунок. И (-b) + a = a - b .

Скалярное умножение
[ редактировать ]
Вектор также можно умножить или масштабировать на действительное число r . В контексте обычной векторной алгебры эти действительные числа часто называют скалярами (от Scale ), чтобы отличить их от векторов. Операция умножения вектора на скаляр называется скалярным умножением . Результирующий вектор

Интуитивно понятно, что умножение на скаляр r раз растягивает вектор в r . Геометрически это можно представить (по крайней мере, в случае, когда r является целым числом) как размещение r копий вектора в строке, где конечная точка одного вектора является начальной точкой следующего вектора.
Если r отрицательно, то вектор меняет направление: он поворачивается на угол 180°. Два примера ( r = −1 и r = 2) приведены ниже:

Скалярное умножение является дистрибутивным по отношению к сложению векторов в следующем смысле: r ( a + b ) = r a + r b для всех векторов a и b и всех скаляров r . Можно также показать, что a − b = a + (−1) b .
Длина
[ редактировать ]Длина величина , норма или a вектора ‖ или обозначается ‖ a , реже, | a |, которое не следует путать с абсолютным значением (скалярной «нормой»).
Длина вектора a может быть вычислена с помощью евклидовой нормы :

является следствием теоремы Пифагора, базисные векторы , поскольку e2 , что e3 являются e1 ортогональными единичными векторами.
Это оказывается равным квадратному корню скалярного произведения вектора на себя, обсуждаемого ниже:

Единичный вектор
[ редактировать ]
Единичный вектор — это любой вектор длиной один; обычно единичные векторы используются просто для указания направления. Вектор произвольной длины можно разделить на его длину, чтобы получить единичный вектор. [14] Это известно как нормализация вектора. Единичный вектор часто обозначается шляпкой, например â .
Чтобы нормализовать вектор a = ( a 1 , a 2 , a 3 ) , масштабируйте вектор на величину, обратную его длине ‖ a ‖. То есть:

Нулевой вектор
[ редактировать ]Нулевой вектор — это вектор нулевой длины. Записанный в координатах вектор равен (0, 0, 0) и обычно обозначается , 0 или просто 0. В отличие от любого другого вектора, он имеет произвольное или неопределенное направление и не может быть нормализован (то есть не существует единичного вектора, кратного нулевому вектору). Сумма нулевого вектора с любым вектором a равна a (то есть 0 + a = a ).

Скалярное произведение
[ редактировать ]Скалярное произведение двух векторов a и b (иногда называемое внутренним произведением или, поскольку его результат является скаляром, скалярным произведением ) обозначается a ∙ b и определяется как:

где θ — мера угла между a и b ( объяснение см. в тригонометрической функции косинуса ). Геометрически это означает, что a и b нарисованы с общей начальной точкой, а затем длина a умножается на длину компонента b , который указывает в том же направлении, что и a .
Скалярное произведение также можно определить как сумму произведений компонентов каждого вектора как

Перекрестное произведение
[ редактировать ]Перекрестное произведение (также называемое векторным произведением или внешним произведением ) имеет смысл только в трех или семи измерениях. Взаимное произведение отличается от скалярного произведения прежде всего тем, что результатом векторного произведения двух векторов является вектор. Векторное произведение, обозначаемое a × b , представляет собой вектор, перпендикулярный как a , так и b , и определяется как

где θ — мера угла между a и b , а n — единичный вектор, перпендикулярный как a, так и b, который образует правую систему. Ограничение праворукости необходимо, поскольку существуют два единичных вектора, которые перпендикулярны как a, так и b , а именно n и (− n ).

Взаимное произведение a × b определяется так, что a , b и a × b также становятся правосторонней системой (хотя a и b не обязательно ортогональны ). Это правило правой руки .
Длину a × b можно интерпретировать как площадь параллелограмма, которого составляют a и b стороны .
Перекрестное произведение можно записать как

При произвольном выборе пространственной ориентации (т. е. с учетом как левых, так и правых систем координат) векторное произведение двух векторов представляет собой псевдовектор, а не вектор (см. Ниже).
Скалярное тройное произведение
[ редактировать ]Скалярное тройное произведение (также называемое коробочным произведением или смешанным тройным произведением ) на самом деле не новый оператор, а способ применения двух других операторов умножения к трем векторам. Скалярное тройное произведение иногда обозначается ( a b c ) и определяется как:

У него есть три основных применения. Во-первых, абсолютное значение коробочного произведения — это объем параллелепипеда , ребра которого определяются тремя векторами. Во-вторых, скалярное тройное произведение равно нулю тогда и только тогда, когда три вектора линейно зависимы , что можно легко доказать, учитывая, что для того, чтобы три вектора не составляли объем, все они должны лежать в одной плоскости. В-третьих, блочное произведение положительно тогда и только тогда, когда три вектора a , b и c правши.
В компонентах ( по отношению к правостороннему ортонормированному базису ), если три вектора рассматриваются как строки (или столбцы, но в одном и том же порядке), скалярное тройное произведение является просто определителем 3х3. матрицы имея три вектора в виде строк

Скалярное тройное произведение линейно во всех трех элементах и антисимметрично в следующем смысле:

Преобразование между несколькими декартовыми базами
[ редактировать ]До сих пор все примеры имели дело с векторами, выраженными через один и тот же базис, а именно, базис e { e 1 , e 2 , e 3 }. Однако вектор можно выразить через любое количество различных оснований, которые не обязательно совпадают друг с другом и при этом остаются одним и тем же вектором. В базисе e вектор a выражается по определению как

Скалярные компоненты в базисе e по определению равны

В другом ортонормированном базисе n = { n 1 , n 2 , n 3 }, который не обязательно совпадает с e , вектор a выражается как

а скалярные компоненты в базисе n по определению равны

Значения p , q , r и u , v , w относятся к единичным векторам таким образом, что результирующая векторная сумма в обоих случаях представляет собой один и тот же физический вектор a . Часто встречаются векторы, известные как разные базы (например, одна база прикреплена к Земле, а вторая — к движущемуся транспортному средству). В таком случае необходимо разработать метод преобразования базисов, чтобы можно было выполнять основные векторные операции, такие как сложение и вычитание. Один из способов выразить u , v , w через p , q , r — использовать матрицы-столбцы вместе с матрицей направленного косинуса, содержащей информацию, связывающую два основания. Такое выражение можно получить, подставив приведенные выше уравнения в форму

Распределение умножения точек дает

Замена каждого скалярного произведения уникальным скаляром дает

и эти уравнения могут быть выражены в виде одного матричного уравнения

Это матричное уравнение связывает скалярные компоненты a в базисе n ( u , v и w ) с компонентами в базисе e ( p , q и r ). Каждый матричный элемент c jk представляет собой направляющий косинус, связывающий n j с e k . [19] Термин «направляющий косинус» относится к косинусу угла между двумя единичными векторами, который также равен их скалярному произведению . [19] Поэтому,

Ссылаясь вместе на e 1 , e 2 , e 3 как на базис e и на n 1 , n 2 , n 3 как на базис n , матрица, содержащая все c jk , известна как « матрица преобразования из e в n ». , или « матрица вращения от e до n » (потому что ее можно представить как «поворот» вектора от одного базиса к другому), или « матрица направляющего косинуса от e до n » [19] (поскольку он содержит направляющие косинусы). Свойства матрицы вращения таковы, что ее обратная матрица равна ее транспонированной . Это означает, что «матрица вращения от e до n » является транспонированием «матрицы вращения от n до e ».
Свойства матрицы направленного косинуса C: [20]
- определитель равен единице, |C| = 1;
- обратное равно транспонированию;
- строки и столбцы представляют собой ортогональные единичные векторы, поэтому их скалярные произведения равны нулю.
Преимущество этого метода заключается в том, что матрицу направленного косинуса обычно можно получить независимо, используя углы Эйлера или кватернион для связи двух базисов векторов, поэтому преобразования базиса можно выполнять напрямую, без необходимости вычислять все скалярные произведения, описанные выше. .
Применяя несколько последовательных умножений матриц, любой вектор можно выразить в любом базисе, если известен набор направляющих косинусов, связывающих последовательные базисы. [19]
Другие размеры
[ редактировать ]За исключением перекрестных и тройных произведений, приведенные выше формулы распространяются на два измерения и более высокие измерения. Например, сложение обобщается на два измерения как и в четырех измерениях, как


Перекрестное произведение нелегко обобщить на другие измерения, в отличие от тесно связанного внешнего произведения , результатом которого является бивектор . В двух измерениях это просто псевдоскаляр.

Семимерное векторное произведение похоже на векторное произведение тем, что его результатом является вектор, ортогональный двум аргументам; однако не существует естественного способа выбора одного из возможных таких продуктов.
Физика
[ редактировать ]Векторы имеют множество применений в физике и других науках.
Длина и единицы измерения
[ редактировать ]В абстрактных векторных пространствах длина стрелки зависит от безразмерного масштаба . Если он представляет, например, силу, «масштаб» имеет физическое измерение длина/сила. Таким образом, обычно существует согласованность масштаба между величинами одного и того же измерения, но в остальном масштабные соотношения могут различаться; например, если «1 ньютон» и «5 м» обозначены стрелкой в 2 см, масштабы составляют 1 м:50 Н и 1:250 соответственно. Одинаковая длина векторов разной размерности не имеет особого значения, если только не существует некоторой константы пропорциональности, присущей системе, которую представляет диаграмма. Также длина единичного вектора (размерная длина, а не длина/сила и т. д.) не имеет значения, инвариантного к системе координат.
Векторные функции
[ редактировать ]Часто в областях физики и математики вектор меняется во времени, то есть он зависит от временного параметра t . Например, если r представляет вектор положения частицы, то r ( t ) дает параметрическое представление траектории частицы. Векторные функции можно дифференцировать и интегрировать путем дифференцирования или интегрирования компонентов вектора, и многие знакомые правила исчисления продолжают соблюдаться для производной и интеграла векторных функций.
Положение, скорость и ускорение
[ редактировать ]Положение точки x = ( x 1 , x 2 , x 3 ) в трехмерном пространстве можно представить как вектор положения , базовая точка которого является началом координат. Вектор положения имеет размеры длины .

Учитывая две точки x = ( x 1 , x 2 , x 3 ), y = ( y 1 , y 2 , y 3 ), их смещение является вектором . который определяет положение y относительно x . Длина этого вектора дает расстояние по прямой от x до y . Перемещение имеет размерность длины.

Скорость дает v точки или частицы является вектором, его длина скорость . Для постоянной скорости положение в момент времени t будет где x 0 — положение в момент времени t = 0. Скорость — это производная по времени от положения. Его размерности — длина/время.

Ускорение a точки — это вектор, который является производной скорости по времени. Его размеры — длина/время. 2 .
Сила, энергия, работа
[ редактировать ]Сила — это вектор с размерами масса×длина/время. 2 а второй закон Ньютона — скалярное умножение

Работа — это скалярное произведение силы и перемещения.

Векторы, псевдовекторы и преобразования
[ редактировать ]В этом разделе есть несколько проблем. Пожалуйста, помогите улучшить его или обсудите эти проблемы на странице обсуждения . ( Узнайте, как и когда удалять эти шаблонные сообщения )
|
Альтернативная характеристика евклидовых векторов, особенно в физике, описывает их как списки величин, которые ведут себя определенным образом при преобразовании координат . Контравариантный вектор должен иметь компоненты, которые «трансформируются противоположно базису» при изменении базиса . Сам вектор не меняется при преобразовании базиса; вместо этого компоненты вектора вносят изменения, которые отменяют изменение базиса. Другими словами, если опорные оси (и полученный из них базис) были повернуты в одном направлении, компонентное представление вектора повернулось бы в противоположном направлении, чтобы создать тот же конечный вектор. Аналогично, если бы опорные оси были растянуты в одном направлении, компоненты вектора уменьшились бы точно компенсирующим образом. Математически, если базис претерпевает преобразование, описываемое обратимой матрицей M , так что координатный вектор x преобразуется в x ′ = M x , то контравариантный вектор v должен быть преобразован аналогичным образом через v ′ = M в . Это важное требование и отличает контравариантный вектор от любой другой тройки физически значимых величин. Например, если v состоит из x , y и z -компонент скорости , то v является контравариантным вектором: если координаты пространства растянуты, повернуты или скручены, то компоненты скорости преобразуются таким же образом . С другой стороны, например, тройка, состоящая из длины, ширины и высоты прямоугольного ящика, могла бы составить три компонента абстрактного вектора , но этот вектор не был бы контравариантным, поскольку вращение ящика не меняет длина, ширина и высота коробки. Примеры контравариантных векторов включают смещение , скорость , электрическое поле , импульс , силу и ускорение .

На языке дифференциальной геометрии координатного перехода эквивалентно определению контравариантного вектора как тензора контравариантного требование преобразования компонентов вектора по одной и той же матрице ранга один. Альтернативно, контравариантный вектор определяется как касательный вектор , а правила преобразования контравариантного вектора следуют из правила цепочки .
Некоторые векторы трансформируются подобно контравариантным векторам, за исключением того, что при отражении от зеркала они переворачиваются и приобретают знак минус. Говорят, что преобразование, которое переключает праворукость на леворукость и наоборот, подобно зеркалу, меняет ориентацию пространства. Вектор, который приобретает знак минус при изменении ориентации пространства, называется псевдовектором или аксиальным вектором . Обычные векторы иногда называют истинными векторами или полярными векторами, чтобы отличить их от псевдовекторов. Псевдовекторы чаще всего встречаются как векторное произведение двух обычных векторов.
Одним из примеров псевдовектора является угловая скорость . Когда вы едете на автомобиле и смотрите вперед, каждое из колес имеет вектор угловой скорости, направленный влево. Если мир отражается в зеркале, которое меняет местами левую и правую сторону автомобиля, отражение этого вектора угловой скорости указывает вправо, но фактический вектор угловой скорости колеса все еще указывает влево, что соответствует минусу. знак. Другие примеры псевдовекторов включают магнитное поле , крутящий момент или, в более общем смысле, любое векторное произведение двух (истинных) векторов.
Это различие между векторами и псевдовекторами часто игнорируется, но оно становится важным при изучении свойств симметрии . См. паритет (физика) .
См. также
[ редактировать ]- Аффинное пространство , которое различает векторы и точки.
- Массив (структура данных)
- Банахово пространство
- Алгебра Клиффорда
- Комплексное число
- Система координат
- Ковариантность и контравариантность векторов
- Четырехвектор , неевклидов вектор в пространстве Минковского (т. е. четырехмерном пространстве-времени), важный в теории относительности .
- Функциональное пространство
- Грассмана расширения Теория
- Гильбертово пространство
- Нормальный вектор
- Нулевой вектор
- Позиция (геометрия)
- Псевдовектор
- Кватернион
- Тангенциальная и нормальная компоненты (вектора)
- Тензор
- Единичный вектор
- Векторный пакет
- Векторное исчисление
- Векторные обозначения
- Векторнозначная функция
Примечания
[ редактировать ]- ^ Иванов 2001.
- ^ Хайнбокель 2001
- ^ Ито 1993 , стр. 1678 ;
- ^ Латынь: vectus, причастие совершенного вида от vehere, «нести» / veho = «Я несу». Об историческом развитии слова вектор см. «вектор н. » . Оксфордский словарь английского языка (онлайн-изд.). Издательство Оксфордского университета . (Требуется подписка или членство в участвующей организации .) и Джефф Миллер. «Самые ранние известные варианты использования некоторых математических слов» . Проверено 25 мая 2007 г.
- ^ Оксфордский словарь английского языка (2-е изд.). Лондон: Кларендон Пресс. 2001. ISBN 9780195219425 .
- ^ Jump up to: а б «вектор | Определение и факты» . Британская энциклопедия . Проверено 19 августа 2020 г.
- ^ Jump up to: а б с д «Векторы» . www.mathsisfun.com . Проверено 19 августа 2020 г.
- ^ Вайсштейн, Эрик В. «Вектор» . mathworld.wolfram.com . Проверено 19 августа 2020 г.
- ^ Jump up to: а б с д Майкл Дж. Кроу , История векторного анализа ; см. также его «Конспекты лекций» (PDF) . Архивировано из оригинала (PDF) 26 января 2004 г. Проверено 4 сентября 2010 г. по этому поводу.
- ^ WR Hamilton (1846) Философский журнал Лондона, Эдинбурга и Дублина, 3-я серия 29 27
- ^ Ито 1993 , с. 1678 г.
- ^ Ранее известный как локализованный вектор . См. Ланг 1986 , с. 9.
- ^ В некоторых старых текстах пара ( A , B ) называется связанным вектором , а ее класс эквивалентности — свободным вектором .
- ^ Jump up to: а б «1.1: Векторы» . Математика LibreTexts . 07.11.2013 . Проверено 19 августа 2020 г.
- ^ Термодинамика и дифференциальные формы
- ^ Гиббс, JW (1901). Векторный анализ: учебник для студентов-математиков и физиков, основанный на лекциях Дж. Уилларда Гиббса , автор: Э. Б. Уилсон, «Сыновья Чареса Скрибнера», Нью-Йорк, с. 15: «Любой вектор r, копланарный с двумя неколлинеарными векторами a и b, может быть разложен на две компоненты, параллельные a и b соответственно. Это разрешение может быть достигнуто путем построения параллелограмма...»
- ^ «Физический факультет Университета Гвельфа, «Крутящий момент и угловое ускорение» » . Архивировано из оригинала 22 января 2007 г. Проверено 5 января 2007 г.
- ^ Харрис, Джон В.; Штекер, Хорст (1998). Справочник по математике и информатике . Биркхойзер. Глава 6, с. 332. ИСБН 0-387-94746-9 .
- ^ Jump up to: а б с д Кейн и Левинсон 1996 , стр. 20–22.
- ^ Роджерс, Роберт М. (2007). Прикладная математика в интегрированных навигационных системах (3-е изд.). Рестон, Вирджиния: Американский институт аэронавтики и астронавтики. ISBN 9781563479274 . OCLC 652389481 .
Ссылки
[ редактировать ]Математические методы лечения
[ редактировать ]- Апостол, Том (1967). Исчисление . Том. 1: Исчисление с одной переменной и введение в линейную алгебру. Уайли. ISBN 978-0-471-00005-1 .
- Апостол, Том (1969). Исчисление . Том. 2: Исчисление с несколькими переменными и линейная алгебра с приложениями. Уайли. ISBN 978-0-471-00007-5 .
- Хайнбокель, Дж. Х. (2001), Введение в тензорное исчисление и механику сплошной среды , Trafford Publishing, ISBN 1-55369-133-4 .
- Ито, Киёси (1993), Энциклопедический математический словарь (2-е изд.), MIT Press , ISBN 978-0-262-59020-4 .
- Иванов А.Б. (2001) [1994], «Вектор» , Математическая энциклопедия , EMS Press .
- Кейн, Томас Р.; Левинсон, Дэвид А. (1996), Dynamics Online , Саннивейл, Калифорния: OnLine Dynamics .
- Ланг, Серж (1986). Введение в линейную алгебру (2-е изд.). Спрингер. ISBN 0-387-96205-0 .
- Педо, Дэниел (1988). Геометрия: Комплексный курс . Дувр. ISBN 0-486-65812-0 .
Физические процедуры
[ редактировать ]- Арис, Р. (1990). Векторы, тензоры и основные уравнения механики жидкости . Дувр. ISBN 978-0-486-66110-0 .
- Фейнман, Ричард ; Лейтон, Р.; Сэндс, М. (2005). «Глава 11». Фейнмановские лекции по физике . Том. Я (2-е изд.). Эддисон Уэсли. ISBN 978-0-8053-9046-9 .
Внешние ссылки
[ редактировать ]- «Вектор» , Математическая энциклопедия , EMS Press , 2001 [1994]
- Векторные тождества онлайн ( PDF )
- Знакомство с векторами Концептуальное введение ( прикладная математика )

| Базы данных органов управления : Национальные |
|---|