Полярная система координат

В математике полярная система координат — это двумерная система координат , в которой каждая точка на плоскости определяется расстоянием от опорной точки и углом от опорного направления. Точка отсчета (аналог начала декартовой системы координат ) называется полюсом , а луч от полюса в опорном направлении — полярной осью . Расстояние от полюса называется радиальной координатой , радиальным расстоянием или просто радиусом , а угол называется угловой координатой , полярным углом или азимутом . [1] Углы в полярной записи обычно выражаются либо в градусах , либо в радианах (2 π рад равны 360 °).
Грегуар де Сен-Винсент и Бонавентура Кавальери независимо представили эти концепции в середине 17 века, хотя фактический термин «полярные координаты» был приписан Грегорио Фонтане в 18 веке. Первоначальной мотивацией введения полярной системы было изучение кругового и орбитального движения .
Полярные координаты наиболее подходят в любом контексте, где рассматриваемое явление по своей сути привязано к направлению и длине от центральной точки плоскости, например спирали . Плоские физические системы с телами, движущимися вокруг центральной точки, или явления, происходящие из центральной точки, часто проще и интуитивно понятнее моделировать с использованием полярных координат.
Полярная система координат расширяется до трех измерений двумя способами: цилиндрической и сферической системами координат.
История
[ редактировать ]
Понятия угла и радиуса использовались древними народами уже в первом тысячелетии до нашей эры . Греческий астроном и астролог Гиппарх (190–120 до н. э.) создал таблицу хордовых функций, указывающую длину хорды для каждого угла, и есть упоминания о том, что он использовал полярные координаты для определения положения звезд. [2] В книге «О спиралях» Архимед описывает архимедову спираль — функцию, радиус которой зависит от угла. Однако греческая работа не распространялась на полную систему координат.
Начиная с 8-го века нашей эры астрономы разработали методы аппроксимации и расчета направления на Мекку ( кибла ) — и расстояния до нее — из любого места на Земле. [3] Начиная с IX века, они использовали сферическую тригонометрию и методы картографической проекции для точного определения этих величин. Расчет по сути представляет собой преобразование экваториальных полярных координат Мекки (т.е. ее долготы и широты ) в ее полярные координаты (т.е. ее киблу и расстояние) относительно системы, опорным меридианом которой является большой круг, проходящий через данное местоположение и полюса Земли. и чья полярная ось — это линия, проходящая через данное местоположение и его антиподальную точку . [4]
Существуют различные версии введения полярных координат как части формальной системы координат. Полная история этого предмета описана в книге Гарварда профессора Джулиана Лоуэлла Кулиджа « Происхождение полярных координат». [5] Грегуар де Сен-Винсент и Бонавентура Кавальери независимо друг от друга представили эту концепцию в середине семнадцатого века. Сен-Винсент писал о них в частном порядке в 1625 году и опубликовал свою работу в 1647 году, а Кавальери опубликовал свою в 1635 году, а исправленная версия появилась в 1653 году. Кавальери впервые использовал полярные координаты для решения задачи, связанной с площадью внутри архимедовой спирали . Блез Паскаль впоследствии использовал полярные координаты для расчета длины параболических дуг .
В «Методе флюксий» (написанном в 1671 г., опубликованном в 1736 г.) сэр Исаак Ньютон исследовал преобразования между полярными координатами, которые он назвал «Седьмым способом; для спиралей», и девятью другими системами координат. [6] В журнале Acta Eruditorum (1691 г.) Якоб Бернулли использовал систему с точкой на прямой, названную полюсом и полярной осью соответственно . Координаты задавались расстоянием от полюса и углом к полярной оси . Работа Бернулли распространилась на поиск радиуса кривизны кривых, выраженных в этих координатах.
Фактический термин «полярные координаты» был приписан Грегорио Фонтане и использовался итальянскими писателями 18-го века. Этот термин появился на английском языке в Джорджа Пикока переводе Лакруа » в 1816 году «Дифференциального и интегрального исчисления . [7] [8] Алексис Клеро был первым, кто придумал полярные координаты в трех измерениях, а Леонард Эйлер был первым, кто их разработал. [5]
Конвенции
[ редактировать ]
Радиальную координату часто обозначают r или ρ , а угловую координату — φ , θ или t . Угловая координата определяется как φ по ISO стандарту 31-11 . Однако в математической литературе вместо этого угол часто обозначают θ.
Углы в полярной записи обычно выражаются либо в градусах , либо в радианах (2 π рад равны 360 °). Градусы традиционно используются в навигации , геодезии и многих прикладных дисциплинах, тогда как радианы чаще встречаются в математике и математической физике . [9]
Угол φ начинается с 0° от исходного направления и увеличивается при вращении по часовой стрелке (cw) или против часовой стрелки (ccw). Например, в математике опорное направление обычно рисуется как луч от полюса горизонтально вправо, а полярный угол увеличивается до положительных углов при вращении против часовой стрелки, тогда как в навигации ( азимут , курс ) рисуется курс 0°. вертикально вверх, а угол увеличивается при вращении по часовой стрелке. Полярные углы уменьшаются в сторону отрицательных значений при вращении в противоположных направлениях.
Уникальность полярных координат
[ редактировать ]Добавление любого количества полных оборотов (360°) к угловой координате не меняет соответствующего направления. Аналогично любая полярная координата идентична координате с отрицательной радиальной составляющей и противоположным направлением (к полярному углу добавляется 180°). Следовательно, одна и та же точка ( r , φ ) может быть выражена с помощью бесконечного числа различных полярных координат ( r , φ + n × 360°) и (− r , φ + 180° + n × 360°) = (− r , φ + (2 n + 1) × 180°) , где n — произвольное целое число . [10] Более того, сам полюс можно выразить как (0, φ ) для любого угла φ . [11]
Если для любой точки, кроме полюса, требуется уникальное представление, обычно ограничивают r положительными числами ( r > 0 ), а φ либо интервалом [0, 360 °) , либо интервалом (−180 °, 180 °). , которые в радианах равны [0, 2π) или (−π, π] . [12] Другое соглашение, относящееся к обычной кодовой области , функции арктанга состоит в том, чтобы разрешить произвольные ненулевые действительные значения радиального компонента и ограничить полярный угол до (-90 °, 90 °] . Во всех случаях уникальный азимут для полюса ( r = 0) необходимо выбрать, например, φ = 0.
Преобразование между полярными и декартовыми координатами
[ редактировать ]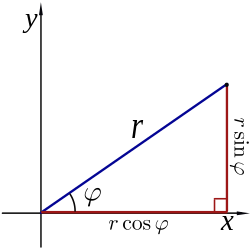
Полярные координаты r и φ можно преобразовать в декартовы координаты x и y с помощью тригонометрических функций синуса и косинуса:

Декартовы координаты x и y можно преобразовать в полярные координаты r и φ с r ≥ 0 и φ в интервале (− π , π ] следующим образом: [13] где гипот — это сумма Пифагора , а atan2 — это обычная вариация арктангенса, определяемая как


Если r сначала рассчитывается, как указано выше, то эту формулу для φ можно сформулировать проще, используя функцию арккосинус :

Комплексные числа
[ редактировать ]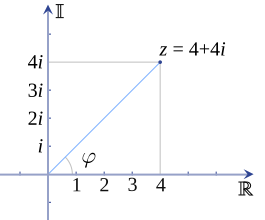
Каждое комплексное число может быть представлено как точка на комплексной плоскости и, следовательно, может быть выражено путем указания либо декартовых координат точки (называемых прямоугольной или декартовой формой), либо полярных координат точки (называемых полярной формой).
В полярной форме координаты расстояния и угла часто называются величиной и аргументом числа соответственно. Два комплексных числа можно умножить, сложив их аргументы и умножив их величины.
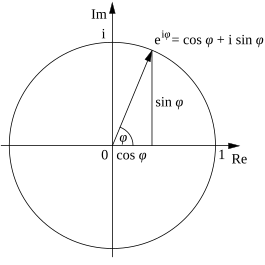
Комплексное число z можно представить в прямоугольной форме как где i — мнимая единица , или альтернативно может быть записана в полярной форме как и отсюда по Эйлера формуле [14] как где e — число Эйлера , а φ , выраженное в радианах, — главное значение функции комплексного числа arg, применяемой к x + iy . Для преобразования прямоугольной и полярной форм комплексного числа можно использовать приведенные выше формулы преобразования. Эквивалентными являются обозначения цис и угла :




Для операций умножения , деления , возведения в степень и извлечения корня комплексных чисел обычно гораздо проще работать с комплексными числами, выраженными в полярной форме, а не в прямоугольной форме. Из законов возведения в степень:
- Умножение
- Разделение
- Возведение в степень ( формула Муавра )
- Извлечение корня (основной корень)



![{\displaystyle {\sqrt[{n}]{re^{i\varphi }}} = {\sqrt[{n}]{r}}e^{i\varphi \over n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9702297c60884f24c748553ecc7246eccf95a448)
Полярное уравнение кривой
[ редактировать ]

Уравнение, определяющее плоскую кривую, выраженное в полярных координатах, известно как полярное уравнение . Во многих случаях такое уравнение можно просто задать, r как функцию φ определив . Результирующая кривая тогда состоит из точек вида ( r ( φ ), φ ) и может рассматриваться как график полярной функции r . Обратите внимание, что в отличие от декартовых координат независимая переменная φ является второй записью в упорядоченной паре.
Различные формы симметрии можно вывести из уравнения полярной функции r :
- Если r (− φ ) = r ( φ ), кривая будет симметрична относительно горизонтального (0 °/180 °) луча;
- Если r ( π − φ ) = r ( φ ), он будет симметричен относительно вертикального (90 °/270 °) луча:
- Если r ( φ - α) = r ( φ ), он будет вращательно-симметричным на α по часовой стрелке и против часовой стрелки относительно полюса.
Из-за круговой природы полярной системы координат многие кривые могут быть описаны довольно простым полярным уравнением, тогда как их декартова форма гораздо сложнее. Среди наиболее известных из этих кривых — полярная роза , спираль Архимеда , лемниската , лимасон и кардиоида .
Для круга, линии и полярной розы ниже подразумевается, что нет ограничений на область и диапазон кривой.
Круг
[ редактировать ]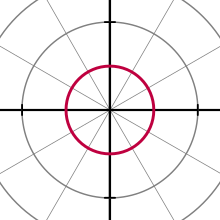
Общее уравнение окружности с центром в точке а радиус а равен


Это можно упростить различными способами, чтобы соответствовать более конкретным случаям, например уравнению для круга с центром в полюсе и радиусом a . [15]

Когда r 0 = a или начало координат лежит на окружности, уравнение принимает вид

В общем случае уравнение можно решить относительно r , дав Решение со знаком минус перед квадратным корнем дает ту же кривую.

Линия
[ редактировать ]Радиальные линии (проходящие через полюс) описываются уравнением где – угол подъема линии; то есть, , где — наклон линии в декартовой системе координат. Нерадиальная линия, пересекающая радиальную линию перпендикулярно в точке имеет уравнение






В противном случае указано это точка, в которой касательная пересекает воображаемую окружность радиуса

Полярная роза
[ редактировать ]
Полярная роза — это математическая кривая, похожая на цветок с лепестками, которую можно выразить простым полярным уравнением:

для любой константы γ 0 (включая 0). Если k — целое число, эти уравнения дадут розу с k если k нечетное -лепестками , , или розу с 2 k -лепестками, если k четное. Если k рационально, но не целое число, может образоваться форма, подобная розе, но с перекрывающимися лепестками. Обратите внимание, что эти уравнения никогда не определяют розу с 2, 6, 10, 14 и т. д. лепестками. Переменная относится к их a непосредственно представляет длину или амплитуду лепестков розы, а k пространственной частоте. Константу γ 0 можно рассматривать как фазовый угол.
Архимедова спираль
[ редактировать ]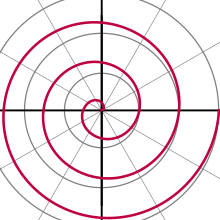
Спираль Архимеда — это спираль, открытая Архимедом , которую также можно выразить как простое полярное уравнение. Оно представлено уравнением Изменение параметра a приведет к повороту спирали, а b управляет расстоянием между рукавами, которое для данной спирали всегда постоянно. Спираль Архимеда имеет два плеча: одно для φ > 0 и одно для φ < 0 . Обе руки плавно соединены у шеста. Если a = 0 , то зеркальное отображение одного плеча через линию 90°/270° даст другое плечо. Эта кривая примечательна как одна из первых кривых после конических сечений , описанных в математическом трактате, и как яркий пример кривой, лучше всего определяемой полярным уравнением.

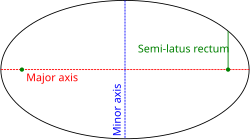
Конические сечения
[ редактировать ]Коническое сечение конуса , один фокус которого находится на полюсе, а другой где-то на луче 0° (так что большая ось лежит вдоль полярной оси), определяется выражением: где e - эксцентриситет и - это полурасширенная прямая кишка (расстояние перпендикулярно фокусу от большой оси до изгиба). Если e > 1 , это уравнение определяет гиперболу ; если e = 1 , оно определяет параболу ; и если e < 1 , это определяет эллипс . Частный случай e = 0 последнего приводит к кругу радиуса .


Пересечение двух полярных кривых
[ редактировать ]Графики двух полярных функций и имеют возможные пересечения трех типов:


- В начале координат, если уравнения и иметь хотя бы одно решение.
- Все точки где являются решениями уравнения где является целым числом.
- Все точки где являются решениями уравнения где является целым числом.


![{\displaystyle [g(\theta _{i}),\theta _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819)




Исчисление
[ редактировать ]Исчисление можно применять к уравнениям, выраженным в полярных координатах. [16] [17]
Угловая координата φ в этом разделе выражается в радианах, что является общепринятым выбором при выполнении вычислений.
Дифференциальное исчисление
[ редактировать ]Используя x = r cos φ и y = r sin φ , можно вывести связь между производными в декартовых и полярных координатах. Для данной функции u ( x , y ) следует, что (путем вычисления ее полных производных )или
![{\displaystyle {\begin{aligned}r{\frac {du}{dr}}&=r{\frac {\partial u}{\partial x}}\cos \varphi +r{\frac {\partial u }{\partial y}}\sin \varphi =x{\frac {\partial u}{\partial x}}+y{\frac {\partial u}{\partial y}},\\[2pt]{ \frac {du}{d\varphi }}&=-{\frac {\partial u}{\partial x}}r\sin \varphi +{\frac {\partial u}{\partial y}}r\ потому что \varphi =-y{\frac {\partial u}{\partial x}}+x{\frac {\partial u}{\partial y}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01d876b55918333fa5b3792a72f5254b82b86c63)
Следовательно, мы имеем следующие формулы:
![{\displaystyle {\begin{aligned}r{\frac {d}{dr}}&=x{\frac {\partial }{\partial x}}+y{\frac {\partial }{\partial y} }\\[2pt]{\frac {d}{d\varphi }}&=-y{\frac {\partial }{\partial x}}+x{\frac {\partial }{\partial y}} .\end{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f6d6d1a9e05c093275ecaf66033a4298e41fe1d)
Используя обратное преобразование координат, можно получить аналогичную обратную связь между производными. Учитывая функцию u ( r , φ ), отсюда следует, что или
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {\partial r}{\partial x}}+ {\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\partial x}},\\[2pt]{\frac {du}{dy}}&={\ frac {\partial u}{\partial r}}{\frac {\partial r}{\partial y}}+{\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\partial y}},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f446e4f0df07ead889d7039cec3301472fc1f9ea)
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {x}{\sqrt {x^{2} +y^{2}}}}-{\frac {\partial u}{\partial \varphi }}{\frac {y}{x^{2}+y^{2}}}\\[2pt] &=\cos \varphi {\frac {\partial u}{\partial r}}-{\frac {1}{r}}\sin \varphi {\frac {\partial u}{\partial \varphi }} ,\\[2pt]{\frac {du}{dy}}&={\frac {\partial u}{\partial r}}{\frac {y}{\sqrt {x^{2}+y^ {2}}}}+{\frac {\partial u}{\partial \varphi }}{\frac {x}{x^{2}+y^{2}}}\\[2pt]&=\ sin \varphi {\frac {\partial u}{\partial r}}+{\frac {1}{r}}\cos \varphi {\frac {\partial u}{\partial \varphi }}.\end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8dcc66ee6a6250cc206f488bb56f976a9a8bd2e8)
Следовательно, мы имеем следующие формулы:
![{\displaystyle {\begin{aligned}{\frac {d}{dx}}&=\cos \varphi {\frac {\partial }{\partial r}}-{\frac {1}{r}}\ sin \varphi {\frac {\partial }{\partial \varphi }}\\[2pt]{\frac {d}{dy}}&=\sin \varphi {\frac {\partial }{\partial r} }+{\frac {1}{r}}\cos \varphi {\frac {\partial }{\partial \varphi }}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a08bfe016a4d8e15a933032d077bcdf8c49d41e)
Чтобы найти декартов наклон касательной к полярной кривой r ( φ ) в любой заданной точке, кривая сначала выражается как система параметрических уравнений .

Дифференцирование обоих уравнений по φ дает
![{\displaystyle {\begin{aligned}{\frac {dx}{d\varphi }}&=r'(\varphi)\cos \varphi -r(\varphi)\sin \varphi \\[2pt]{\ frac {dy}{d\varphi }}&=r'(\varphi )\sin \varphi +r(\varphi )\cos \varphi .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)
Деление второго уравнения на первое дает декартов наклон касательной к кривой в точке ( r ( φ ), φ ) :

Другие полезные формулы, включая дивергенцию, градиент и лапласиан в полярных координатах, см. в разделе криволинейные координаты .
Интегральное исчисление (длина дуги)
[ редактировать ]Длина дуги (длина отрезка), определяемая полярной функцией, находится путем интегрирования по кривой r ( φ ). Обозначим через L эту длину вдоль кривой, начиная от точек A до точки B , где эти точки соответствуют φ = a и φ = b, таким что 0 < b − a < 2 π . Длина L определяется следующим интегралом
![{\displaystyle L=\int _{a}^{b}{\sqrt {\left[r(\varphi)\right]^{2}+\left[{\tfrac {dr(\varphi)}{d \varphi }}\right]^{2}}}d\varphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)
Интегральное исчисление (площадь)
[ редактировать ]
Обозначим через R область, ограниченную кривой r ( φ ) и лучами φ = a и φ = b , где 0 < b − a ≤ 2 π . Тогда площадь R равна
![{\displaystyle {\frac {1}{2}}\int _{a}^{b}\left[r(\varphi)\right]^{2}\,d\varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)


Этот результат можно найти следующим образом. Во-первых, интервал [ a , b ] делится на n подинтервалов, где n — некоторое положительное целое число. Таким образом, Δ φ , угловая мера каждого подинтервала, равна b - a (общая угловая мера интервала), деленная на n , количество подинтервалов. Для каждого подинтервала i = 1, 2, ..., n пусть φ i будет серединой подинтервала и построит сектор с центром в полюсе, радиусом r ( φ i ), центральным углом Δ φ и длиной дуги. р ( φ я )Δ φ . Таким образом, площадь каждого построенного сектора равна Следовательно, общая площадь всех секторов равна
![{\displaystyle \left[r(\varphi _{i})\right]^{2}\pi \cdot {\frac {\Delta \varphi }{2\pi }}={\frac {1}{2 }}\left[r(\varphi _{i})\right]^{2}\Delta \varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)

По мере увеличения количества подинтервалов n аппроксимация площади улучшается. При n → ∞ сумма становится суммой Римана для указанного выше интеграла.
Механическим устройством, которое вычисляет интегралы площади, является планиметр , который измеряет площадь плоских фигур, отслеживая их: это повторяет интегрирование в полярных координатах, добавляя соединение, так что двухэлементная связь влияет на теорему Грина , преобразуя квадратичный полярный интеграл в линейный интеграл.
Обобщение
[ редактировать ]Используя декартовы координаты , бесконечно малый элемент площади можно рассчитать как dA = dx dy . Правило замены кратных интегралов гласит, что при использовании других координат необходимо учитывать определитель Якобиана формулы преобразования координат:
![{\displaystyle J=\det {\frac {\partial (x,y)}{\partial (r,\varphi)}} = {\begin{vmatrix}{\frac {\partial x}{\partial r} }&{\frac {\partial x}{\partial \varphi }}\\[2pt]{\frac {\partial y}{\partial r}}&{\frac {\partial y}{\partial \varphi }}\end{vmatrix}}={\begin{vmatrix}\cos \varphi &-r\sin \varphi \\\sin \varphi &r\cos \varphi \end{vmatrix}}=r\cos ^{2 }\varphi +r\sin ^{2}\varphi =r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)
Следовательно, элемент площади в полярных координатах можно записать как

Теперь функцию, заданную в полярных координатах, можно проинтегрировать следующим образом:

Здесь R — та же область, что и выше, а именно область, ограниченная кривой r ( φ ) и лучами φ = a и φ = b . Формула площади R получается, если принять f тождественно равным 1.




Более удивительное применение этого результата дает интеграл Гаусса :

Векторное исчисление
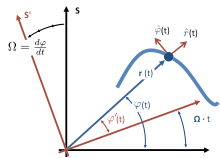
[ редактировать ]Векторное исчисление также можно применять к полярным координатам. Для плоского движения пусть быть вектором положения ( r cos( φ ), r sin( φ )) , где r и φ зависят от времени t .

Мы определяем ортонормированный базис с тремя единичными векторами: радиальным, поперечным и нормальным направлениями .Радиальное направление определяется нормализацией : Радиальные направления и направления скорости охватывают плоскость движения , нормальное направление которой обозначается : Поперечное направление перпендикулярно как радиальному, так и нормальному направлениям:




Затем

Это уравнение можно получить, взяв производную функции и производные единичных базисных векторов.
Для кривой в 2D, где параметр предыдущие уравнения упрощаются до:


Центробежные условия и условия Кориолиса
[ редактировать ]


Термин иногда называют центростремительным ускорением , а термин как ускорение Кориолиса . Например, см. Шанкар. [18]


Примечание: эти члены, возникающие при выражении ускорения в полярных координатах, являются математическим следствием дифференцирования; они появляются всякий раз, когда используются полярные координаты. В динамике плоских частиц эти ускорения появляются при установлении второго закона Ньютона о движении во вращающейся системе отсчета. Здесь эти дополнительные члены часто называют фиктивными силами ; фиктивны, потому что они являются просто результатом изменения системы координат. Это не значит, что их не существует, скорее, они существуют только во вращающейся системе отсчета.
Вращающаяся рама
[ редактировать ]Для частицы, находящейся в плоском движении, один из подходов к приданию физического значения этим терминам основан на концепции мгновенной системы отсчета, вращающейся в одном направлении . [19] Чтобы определить систему координат, вращающуюся в одном направлении, сначала выбирается начало координат, от которого расстояние r ( t определяется ) до частицы. Устанавливается ось вращения, перпендикулярная плоскости движения частицы и проходящая через это начало координат. Затем в выбранный момент t скорость вращения системы Ω, вращающейся вместе, приводится в соответствие со скоростью вращения частицы вокруг этой оси dφ / dt . Далее, члены ускорения в инерциальной системе отсчета связаны с членами в системе отсчета, вращающейся вместе. Пусть положение частицы в инерциальной системе отсчета будет ( r ( t ), φ ( t )), а во вращающейся в одном направлении системе — ( r ′(t), φ ′(t) ). Поскольку система, вращающаяся в одном направлении, вращается с той же скоростью, что и частица, dφ ′/ dt = 0. Фиктивная центробежная сила в системе, вращающейся в одном направлении, равна mr Ω. 2 , радиально наружу. Скорость частицы в системе отсчета, вращающейся вместе, также направлена радиально наружу, поскольку dφ ′/ dt = 0. Таким образом, фиктивная сила Кориолиса имеет значение −2 м ( dr / dt в направлении увеличения φ. ) Ω, направленное только . Таким образом, используя эти силы во втором законе Ньютона, мы находим: где точки над точками представляют временные различия, а F — чистая реальная сила (в отличие от фиктивных сил). С точки зрения компонентов это векторное уравнение принимает вид: которые можно сравнить с уравнениями для инерциальной системы отсчета:



Это сравнение, а также признание того, что по определению вращающейся в одном направлении системы отсчета в момент времени t она имеет скорость вращения Ω = dφ / dt , показывает, что мы можем интерпретировать члены ускорения (умноженного на массу частицы) это обнаруживается в инерциальной системе отсчета как отрицательная сила центробежной силы и сил Кориолиса, которая наблюдается в мгновенной, неинерциальной системе отсчета, вращающейся вместе.
Для общего движения частицы (в отличие от простого кругового движения) центробежные силы и силы Кориолиса в системе отсчета частицы обычно относят к мгновенному соприкасающемуся кругу ее движения, а не к фиксированному центру полярных координат. Более подробно см. центростремительную силу .
Дифференциальная геометрия
[ редактировать ]В современной терминологии дифференциальной геометрии полярные координаты представляют собой карты координат дифференцируемого многообразия R. 2 \ {(0,0)} , плоскость минус начало координат. В этих координатах евклидов метрический тензор имеет вид Это можно увидеть с помощью формулы замены переменных для метрического тензора или путем вычисления дифференциальных форм dx , dy через внешнюю производную 0-форм x = r cos( θ ) , y = r sin( θ ) и подстановки их в евклидовом метрическом тензоре ds 2 = dx 2 + ты 2 .

Элементарное доказательство формулы |
|---|


















Ортонормированная относительно система координат этой метрики имеет вид с двойным кофреймом Форма связности относительно этой системы координат и связности Леви-Чивита задается кососимметричной матрицей 1-форм и, следовательно, форма кривизны Ω = dω + ω ∧ ω обращается в нуль. Следовательно, как и ожидалось, проколотая плоскость представляет собой плоское многообразие .



Расширения в 3D
[ редактировать ]Полярная система координат расширена в трех измерениях с помощью двух разных систем координат: цилиндрической и сферической системы координат .
Приложения
[ редактировать ]Полярные координаты двумерны и поэтому их можно использовать только там, где положения точек лежат на одной двумерной плоскости. Они наиболее подходят в любом контексте, где рассматриваемое явление по своей сути привязано к направлению и длине от центральной точки. Например, приведенные выше примеры показывают, как элементарных полярных уравнений достаточно для определения кривых, таких как спираль Архимеда, уравнение которых в декартовой системе координат было бы гораздо более сложным. Более того, многие физические системы, например те, которые связаны с телами, движущимися вокруг центральной точки, или с явлениями, происходящими из центральной точки, проще и интуитивно понятнее моделировать с использованием полярных координат. Первоначальной мотивацией введения полярной системы было изучение кругового и орбитального движения .
Позиция и навигация
[ редактировать ]Полярные координаты часто используются в навигации , поскольку пункт назначения или направление движения может быть задан как угол и расстояние от рассматриваемого объекта. Например, самолеты используют для навигации слегка измененную версию полярных координат. В этой системе, которая обычно используется для любого вида навигации, луч 0 ° обычно называется курсом 360, а углы продолжаются по часовой стрелке, а не против часовой стрелки, как в математической системе. Курс 360 соответствует магнитному северу , а заголовки 90, 180 и 270 соответствуют магнитному востоку, югу и западу соответственно. [20] Таким образом, самолет, пролетающий 5 морских миль строго на восток, будет пролетать 5 единиц по курсу 90 (читается ноль-девять-ноль авиадиспетчерской службой ). [21]
Моделирование
[ редактировать ]Системы, демонстрирующие радиальную симметрию, обеспечивают естественные настройки для полярной системы координат, при этом центральная точка действует как полюс. Ярким примером такого использования является уравнение потока подземных вод применительно к радиально-симметричным скважинам. Системы с радиальной силой также являются хорошими кандидатами на использование полярной системы координат. К таким системам относятся гравитационные поля , подчиняющиеся закону обратных квадратов , а также системы с точечными источниками , например радиоантеннами .
Радиально асимметричные системы также можно моделировать с использованием полярных координат. Например, иллюстрирует микрофона диаграмма направленности его пропорциональную реакцию на звук, поступающий с заданного направления, и эти диаграммы направленности можно представить в виде полярных кривых. Кривую для стандартного кардиоидного микрофона, наиболее распространенного однонаправленного микрофона, можно представить как r = 0,5 + 0,5sin( φ ) на целевой расчетной частоте. [22] На более низких частотах картина смещается в сторону всенаправленности.
См. также
[ редактировать ]- Криволинейные координаты
- Список распространенных преобразований координат
- Логполярные координаты
- Полярное разложение
- Единичный круг
Ссылки
[ редактировать ]- ^ Браун, Ричард Г. (1997). Эндрю М. Глисон (ред.). Высшая математика: предварительное исчисление с дискретной математикой и анализом данных . Эванстон, Иллинойс: Макдугал Литтел. ISBN 0-395-77114-5 .
- ^ Дружелюбный, Майкл (24 августа 2009 г.). «Вехи в истории тематической картографии, статистической графики и визуализации данных» (PDF) . Архивировано из оригинала (PDF) 26 сентября 2018 года . Проверено 23 июля 2016 г.
- ^ Кинг, Дэвид А. (2005). «Сакральная география ислама» . В Коэтсере, Теун; Люк, Бергманс (ред.). Математика и божественное: историческое исследование . Амстердам: Эльзевир. стр. 162–78. ISBN 0-444-50328-5 .
- ^ Кинг ( 2005 , стр. 169 ). Расчеты были настолько точными, насколько это было возможно при ограничениях, налагаемых их предположением о том, что Земля представляет собой идеальную сферу.
- ^ Jump up to: а б Кулидж, Джулиан (1952). «Происхождение полярных координат» . Американский математический ежемесячник . 59 (2). Математическая ассоциация Америки: 78–85. дои : 10.2307/2307104 . JSTOR 2307104 .
- ^ Бойер, CB (1949). «Ньютон как создатель полярных координат». Американский математический ежемесячник . 56 (2). Математическая ассоциация Америки: 73–78. дои : 10.2307/2306162 . JSTOR 2306162 .
- ^ Миллер, Джефф. «Самые ранние известные варианты использования некоторых математических слов» . Проверено 10 сентября 2006 г.
- ^ Смит, Дэвид Юджин (1925). История математики, Том II . Бостон: Джинн и Ко. с. 324.
- ^ Сервей, Раймонд А.; Джуэтт-младший, Джон В. (2005). Принципы физики . Брукс/Коул — Thomson Learning. ISBN 0-534-49143-Х .
- ^ «Полярные координаты и графики» (PDF) . 13 апреля 2006 г. Архивировано из оригинала (PDF) 22 августа 2016 года . Проверено 22 сентября 2006 г.
- ^ Ли, Теодор; Дэвид Коэн; Дэвид Склар (2005). Предварительное исчисление: с тригонометрией единичного круга (Четвертое изд.). Томсон Брукс/Коул. ISBN 0-534-40230-5 .
- ^ Стюарт, Ян; Дэвид Талл (1983). Комплексный анализ (Автостопом по самолету) . Издательство Кембриджского университета. ISBN 0-521-28763-4 .
- ^ Торренс, Брюс Фоллетт; Ева Торренс (1999). Введение студента в математику . Издательство Кембриджского университета. ISBN 0-521-59461-8 .
- ^ Смит, Джулиус О. (2003). «Личность Эйлера» . Математика дискретного преобразования Фурье (ДПФ) . Издательство W3K. ISBN 0-9745607-0-7 . Архивировано из оригинала 15 сентября 2006 г. Проверено 22 сентября 2006 г.
- ^ Клейс, Йохан. «Полярные координаты» . Архивировано из оригинала 27 апреля 2006 г. Проверено 25 мая 2006 г.
- ^ Хаш, Лоуренс С. «Области, ограниченные полярными кривыми» . Архивировано из оригинала 1 марта 2000 г. Проверено 25 ноября 2006 г.
- ^ Лоуренс С. Хаш. «Касательные линии к полярным графикам» . Архивировано из оригинала 21 ноября 2019 г. Проверено 25 ноября 2006 г.
- ^ Рамамурти Шанкар (1994). Принципы квантовой механики (2-е изд.). Спрингер. п. 81. ИСБН 0-306-44790-8 .
- ^ Дальнейшее обсуждение см. Джон Р. Тейлор (2005). Классическая механика . Университетские научные книги. п. §9.10, стр. 358–359. ISBN 1-891389-22-Х .
- ^ Шанти, Сумрит. «Авиационная навигационная система» . Проверено 26 ноября 2006 г.
- ^ «Аварийные процедуры» (PDF) . Архивировано из оригинала (PDF) 3 июня 2013 г. Проверено 15 января 2007 г.
- ^ Эргл, Джон (2005). Справочник по технике звукозаписи (Четвертое изд.). Спрингер. ISBN 0-387-28470-2 .
Общие ссылки
[ редактировать ]- Адамс, Роберт; Кристофер Эссекс (2013). Исчисление: полный курс (Восьмое изд.). Pearson Canada Inc. ISBN 978-0-321-78107-9 .
- Антон, Ховард; Ирл Бивенс; Стивен Дэвис (2002). Исчисление (Седьмое изд.). Anton Textbooks, Inc. ISBN 0-471-38157-8 .
- Финни, Росс; Джордж Томас; Франклин Демана; Берт Уэйтс (июнь 1994 г.). Исчисление: графическое, численное, алгебраическое (изд. Версия с одной переменной). Addison-Wesley Publishing Co. ISBN издательства 0-201-55478-Х .
Внешние ссылки
[ редактировать ]- «Полярные координаты» , Математическая энциклопедия , EMS Press , 2001 [1994]
- Графическое программное обеспечение в Curlie
- Конвертер координат — преобразует полярные, декартовы и сферические координаты.
- Динамическая демонстрация полярной системы координат
| Базы данных органов управления : Национальные |
|---|