Экспериментальный анализ неопределенности
Эта статья читается как учебник . ( март 2011 г. ) |
Экспериментальный анализ неопределенности — это метод, который анализирует производную величину на основе неопределенностей экспериментально измеренных величин, которые используются в некоторой форме математического соотношения (« модели ») для расчета этой производной величины. Модель, используемая для преобразования измерений в производную величину, обычно основана на фундаментальных принципах научной или инженерной дисциплины .
Неопределенность состоит из двух компонентов, а именно: систематической ошибки (связанной с точностью ) и неизбежных случайных отклонений , возникающих при проведении повторных измерений (связанных с точностью ). Измеренные величины могут иметь погрешности , и они, безусловно, имеют случайные вариации , поэтому необходимо решить, как они «распространяются» на неопределенность полученной величины. Анализ неопределенности часто называют « распространением ошибки ».
Введение
[ редактировать ]Например, экспериментальный анализ неопределенности лабораторного эксперимента по физике, в котором маятник может оценить значение локального гравитационного ускорения постоянной g . Соответствующее уравнение [1] для идеализированного простого маятника примерно равно
![{\displaystyle T\,=\,2\,\pi \,{\sqrt {L \over g}}\,\,\left[{1\,\,\,+\,\,\,{1 \over 4}\sin ^{2}\left({\theta \over 2}\right)\,}\right]{\mathbf {\,\,\,\,\,\,\,\,\ ,уравнение(1)} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f4e47b914f7f78cde82f6924fe0c25a5de464dfc)
где T — период колебаний L секунды), ( — длина (метры), а θ — начальный угол. Поскольку θ является единственной координатой этой системы, зависящей от времени, возможно, было бы лучше использовать θ 0 для обозначения начального (начального) угла смещения , но для обозначения будет удобнее опускать нижний индекс. Решая уравнение (1) для постоянной g ,
![{\displaystyle {\hat {g}}\,=\,{{4\,\pi ^{2}L} \over {T^{2}}} \,\,\left[{\,1\ ,\,\,+\,\,\,{1 \более 4}\sin ^{2}\left({\theta \over 2}\right)\,}\right]^{2}{\mathbf {\,\,\,\,\,\,\,\,\,\,\,\,Eq(2)} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a32c52196c3f2a9c14aa608a6fed3f0942f28b31)
Это уравнение или модель, которая будет использоваться для оценки g на основе наблюдаемых данных. будет внесена некоторая небольшая погрешность В оценку g из-за того, что член в скобках представляет собой только первые два члена разложения в ряд , но в практических экспериментах эту погрешность можно и будут игнорировать.
Процедура заключается в измерении длины маятника L , а затем в повторных измерениях периода T , времени выщелачивания, начиная движение маятника с того же начального угла смещения θ . Повторные измерения T усредняются , а затем используются в уравнении (2) для получения оценки g . Уравнение (2) представляет собой средство перехода от измеренных величин L , T и θ к производной величине g .
Обратите внимание, что альтернативным подходом было бы преобразовать все отдельные измерения T в оценки g , используя уравнение (2), а затем усреднить эти значения g для получения окончательного результата. Это было бы непрактично без какой-либо формы механизированных вычислительных возможностей (т. е. компьютера или калькулятора), поскольку объем численных вычислений при оценке уравнения (2) для многих измерений T был бы утомительным и подверженным ошибкам.
Анализ систематических ошибок/смещений/чувствительности
[ редактировать ]Введение
[ редактировать ]Необходимо измерить три величины: (1) длину маятника от точки его подвеса до центра масс «кача»; (2) период колебаний ; (3) начальный угол смещения. В этом эксперименте предполагается, что длина фиксирована и ее следует измерить один раз, хотя можно проводить повторные измерения и усреднять результаты.
Начальный угол смещения необходимо задавать для каждого повторного измерения периода Т , и этот угол предполагается постоянным. Часто начальный угол остается небольшим (менее 10 градусов), так что поправка на этот угол считается незначительной; т. е. член в скобках в уравнении (2) принимается равным единице. Однако для изучаемого здесь эксперимента эта поправка представляет интерес, так что типичное начальное значение смещения может находиться в диапазоне от 30 до 45 градусов.
Предположим, что случился неизвестный студентам случай, когда измерения длины были слишком малы, скажем, на 5 мм. Это может произойти из-за неисправного измерительного устройства (например, измерительной линейки) или, что более вероятно, из систематической ошибки при использовании этого устройства при измерении L. - за Это могло произойти, если учащиеся забыли измерить центр массы боба и вместо этого последовательно измеряли точку, где к нему прикреплялась веревка. Таким образом, эта ошибка не случайна; это происходит каждый раз, когда измеряется длина.
Далее, период колебаний T может страдать от систематической ошибки , если, например, студенты постоянно неправильно подсчитывали возвратно-поступательные движения маятника, чтобы получить целое число циклов. (Часто экспериментальная процедура требует отсчета нескольких циклов, например, пяти или десяти, а не только одного.) Или, возможно, у цифрового секундомера, который они использовали, была электронная проблема, и он постоянно считывал слишком большое значение, скажем, на 0,02 секунды. Конечно, будут также случайные изменения времени; этот вопрос будет рассмотрен позже. Здесь вызывает беспокойство систематическая, неслучайная ошибка измерения периода колебаний маятника.
Наконец, первоначальный угол можно было измерить с помощью простого транспортира . Трудно позиционировать и считать начальный угол с высокой точностью (или точностью; это измерение имеет плохую воспроизводимость ). Предположим, что учащиеся постоянно неправильно позиционируют транспортир, так что показания угла становятся меньше, скажем, на 5 градусов. Тогда все первоначальные измерения угла будут смещены на эту величину.
Ошибки чувствительности
[ редактировать ]Однако во время эксперимента систематические ошибки неизвестны . Если было известно, например, что измерения длины занижены на 5 мм, учащиеся могли либо исправить ошибку измерения, либо добавить 5 мм к своим данным, чтобы устранить погрешность. Скорее, более ценным является изучение последствий неслучайных, систематических ошибок до проведения эксперимента. Это форма анализа чувствительности .
Идея состоит в том, чтобы оценить разницу или дробное изменение полученной величины, здесь g , при условии, что измеренные величины смещены на некоторую заданную величину. Например, если бы начальный угол был постоянно меньшим на 5 градусов, какое влияние это оказало бы на расчетное значение g ? Если длина постоянно сокращается на 5 мм, как изменится оценка g ? Если измерения периода постоянно превышают длину на 0,02 секунды, насколько изменится расчетное значение g ? Что произойдет с оценкой g , если эти смещения возникнут в различных комбинациях?
Одна из причин для изучения этих вопросов состоит в том, что план эксперимента в смысле того, какое оборудование и процедуры будут использоваться (а не в статистическом смысле ; это будет рассмотрено позже), зависит от относительного влияния систематических ошибок в измеренных величинах. Если смещение начального угла на 5 градусов приведет к неприемлемому изменению оценки g , то, возможно, необходимо разработать более сложный и точный метод для этого измерения. С другой стороны, если до проведения эксперимента можно показать, что этот угол оказывает незначительное влияние на g , то использование транспортира допустимо.
Другая мотивация для этой формы анализа чувствительности возникает после того, как эксперимент был проведен, и анализ данных показывает смещение в оценке g . Изучение изменения g , которое может возникнуть в результате смещения нескольких входных параметров , то есть измеряемых величин, может привести к пониманию того, что вызвало смещение в оценке g . Этот анализ может помочь выявить такие проблемы, как ошибки измерений, проблемы с аппаратурой, неправильные предположения о модели и т. д.
Прямой (точный) расчет смещения
[ редактировать ]Самый простой, если не сказать очевидный, способ приблизиться к этому — это напрямую вычислить изменение с помощью уравнения (2) дважды: один раз с теоретическими смещенными значениями, а затем с истинными, несмещенными значениями параметров:

где Δ L и т. д. представляют собой отклонения в соответствующих измеренных величинах. (Карат над g означает расчетное значение g .) Чтобы сделать это более конкретным, рассмотрим идеализированный маятник длиной 0,5 метра с начальным углом смещения 30 градусов; из уравнения (1) тогда период будет равен 1,443 секунды. Предположим, что смещения составляют -5 мм, -5 градусов и +0,02 секунды для L , θ и T соответственно. Затем, рассматривая сначала только смещение длины Δ L само по себе,

и для этого и других параметров измерения T и θ изменения g записаны в таблице 1 .
Обычно при анализе чувствительности изменения выражают в долях (или процентах). Тогда точное дробное изменение g равно

Результаты этих расчетов для примера маятниковой системы суммированы в таблице 1.
Линеаризованное приближение; введение
[ редактировать ]) нецелесообразно Далее предположим, что прямым подходом найти зависимость полученной величины ( g ) от входных, измеряемых параметров ( L, T, θ . Есть ли альтернативный метод? Из исчисления понятие полного дифференциала [2] здесь полезно:

где z — некоторая функция нескольких ( p ) переменных x . Символ ∂ z /∂x 1 представляет собой « частную производную » функции z по одной из нескольких переменных x , влияющих на z . Для настоящей цели нахождение этой производной состоит из сохранения постоянными всех переменных, кроме той, по отношению к которой находится частичная производная, а затем нахождения первой производной обычным способом (который может включать и часто включает в себя цепное правило ). В функциях, включающих углы, как в уравнении (2), углы должны измеряться в радианах .
Уравнение (5) представляет собой линейную функцию , которая аппроксимирует , например, кривую в двух измерениях ( p =1) касательной линией в точке этой кривой, или в трех измерениях ( p =2) она аппроксимирует поверхность касательной плоскость в точке этой поверхности. Идея состоит в том, что общее изменение z в непосредственной близости от конкретной точки находится из уравнения (5). На практике вместо дифференциалов используются конечные разности, так что

и это работает очень хорошо, пока приращения Δx достаточно малы. [3] Даже сильно изогнутые функции почти линейны в достаточно маленькой области. Тогда дробное изменение

Альтернативный, полезный способ записи уравнения (6) использует формализм векторной матрицы:

При применении этих частных производных обратите внимание, что это функции, которые будут оцениваться в точке , то есть все параметры, которые появляются в частичных производных, будут иметь числовые значения. Таким образом, векторное произведение в уравнении (8), например, даст одно числовое значение. Для исследований смещения значения, используемые в частичных значениях, являются истинными значениями параметров, поскольку мы аппроксимируем функцию z в небольшой области вблизи этих истинных значений.
Линеаризованное приближение; пример абсолютного изменения
[ редактировать ]Возвращаясь к примеру с маятником и применяя эти уравнения, абсолютное изменение оценки g равно

и теперь задача состоит в том, чтобы найти частные производные в этом уравнении. Это значительно упростит процесс определения
![{\displaystyle \alpha (\theta)\,\,\equiv \,\,\left[{\,1\,\,\,+\,\,\,{1 \over 4}\sin ^{2 }\left({\theta \over 2}\right)\,}\right]^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9442b19b90855254400405aa0f8d49a3c13c4f23)
Переписав уравнение (2) и взяв частичные,

Подставляя эти производные в уравнение (9),
![{\displaystyle \Delta {\hat {g}} \,\,\,\approx \,\,\,\left[{{{4\,\pi ^{2}} \over {T^{2} }}\alpha (\theta )}\right]\,\Delta L\,\,\,\,\,+\,\,\,\,\,\,\left[{{{-8\, L\,\pi ^{2}} \over {T^{3}}}\alpha (\theta )}\right]\Delta T\,\,\,+\,\,\,\,\left [{{{L\,\pi ^{2}} \over {T^{2}}}\,\,{\sqrt {\alpha (\theta )}}\,\,\sin(\theta ) }\right]\Delta \theta {\mathbf {\,\,\,\,\,\,\,\,Eq(11)} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/02823c17786061a3bf52e1ed94692df783d712bf)
а затем, применяя те же численные значения параметров и их смещений, что и раньше, получаются результаты в Таблице 1. Значения достаточно близки к значениям, найденным с помощью уравнения (3), но не точны, за исключением L . Это связано с тем, что изменение g линейно с L , что можно вывести из того факта, что частичное по (относительно) L не зависит от L . Таким образом, линейное «приближение» оказывается точным для L . Частичное относительно θ более сложное и является результатом применения цепного правила к α . Кроме того, при использовании уравнения (10) в уравнении (9) обратите внимание, что угловые меры, включая Δ θ , должны быть преобразованы из градусов в радианы.
Линеаризованное приближение; пример дробного изменения
[ редактировать ]в результате линеаризованного приближения Дробное изменение оценки g , применяя уравнение (7) к примеру с маятником, равно:

что выглядит очень сложным, но на практике это обычно приводит к простому соотношению дробного изменения. Таким образом,
![{\displaystyle {{\Delta {\hat {g}}} \over {\hat {g}}} \,\,\,\approx \,\,\,\left[{{{{4\,\ pi ^{2}} \over {T^{2}}}\alpha (\theta )} \over {{{4\,\pi ^{2}L} \over {T^{2}}}\ альфа (\theta )}}\right]\,\Delta L\,\,\,\,\,+\,\,\,\,\,\,\left[{{{{-8\,L \,\pi ^{2}} \over {T^{3}}}\alpha (\theta )} \over {{{4\,\pi ^{2}L} \over {T^{2} }}\alpha (\theta )}}\right]\Delta T\,\,\,+\,\,\,\,\left[{{{{L\,\pi ^{2}} \over {T^{2}}}\,\,{\sqrt {\alpha (\theta)}}\,\,\sin(\theta)} \over {{{4\,\pi ^{2}L } \over {T^{2}}}\alpha (\theta )}}\right]\Delta \theta }](https://wikimedia.org/api/rest_v1/media/math/render/svg/13b24cb473f258483687f001edce16d156a9f0c5)
что сводится к

Это, за исключением последнего члена, удивительно простой результат. Разлагая последний член в ряд по θ ,
![{\displaystyle {{\sin(\theta)} \over {4\left[{1\,\,\,+\,\,\,{1 \over 4}\sin ^{2}\left({ \theta \более 2}\right)}\right]}}\,\,\,\approx \,\,\,{\theta \over 4}\,\,\,\,\,\,\, \,\,\,\,\Rightarrow \,\,\,\,\,\,\,\,{\theta \over 4}\,\,\Delta \theta \,\,\,=\, \,\,{{\theta ^{2}} \over 4}{{\Delta \theta } \over \theta }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5edc067a2e0d7f6ed66c3d715342e83f4545882)
поэтому результат для линеаризованного приближения дробного изменения оценки g равен

Если вспомнить, что углы измеряются в радианах и что в примере используется значение 30 градусов, это составляет около 0,524 радиана; разделенный пополам и возведенный в квадрат, как говорит коэффициент дробного изменения θ , этот коэффициент составляет около 0,07. Из уравнения (12) можно легко сделать вывод, что наиболее влиятельными параметрами являются T, L, θ. Другими словами, полученная величина g более чувствительна, например, к измеренной величине T, чем к L или θ . После замены числовых значений примера результаты указаны в Таблице 1 и достаточно хорошо согласуются с результатами, полученными с помощью уравнения (4).
Форма уравнения (12) обычно является целью анализа чувствительности, поскольку она является общей, т. е. не привязана к конкретному набору значений параметров, как это было в случае метода прямого расчета уравнения (3) или ( 4), и при проверке в основном становится ясно, какие параметры оказывают наибольшее влияние, если они имеют систематические ошибки. Например, если измерение длины L было выше на десять процентов, то оценка g также будет выше на десять процентов. Если бы период T был занижен на 20 процентов, то оценка g была бы завышена на 40 процентов (обратите внимание на отрицательный знак для термина T ). Если бы начальный угол θ был завышен на десять процентов, оценка g была бы завышена примерно на 0,7 процента.
Эта информация очень ценна при анализе данных после эксперимента, чтобы отследить, какие измерения могли способствовать наблюдаемому отклонению общего результата (оценка g ). Например, угол можно было бы быстро исключить как единственный источник отклонения g , скажем, на 10 процентов. Угол должен был бы отклоняться примерно на 140 процентов, что, как хотелось бы надеяться, физически неправдоподобно.
Таблица результатов
[ редактировать ]| Номинальный | Предвзятость | Соотношение | Точная Δg | Линейная Δg | Точная Δg/г | Линейная Δg/г | |
| Длина L | 0,5 м | − 0,005 м | 0.010 | − 0.098 | − 0.098 | − 0.010 | − 0.010 |
| Период Т | 1,443 с | +0,02 с | 0.014 | − 0.266 | − 0.272 | − 0.027 | − 0.028 |
| Угол я | 30 тебе | − 5 дней | 0.17 | − 0.0968 | − 0.105 | − 0.01 | − 0.011 |
| Все | −0.455 | − 0.475 | − 0.046 | − 0.049 | |||
| уравнение (3) | уравнение (11) | уравнение (4) | уравнение (12) |
Случайная ошибка/точность
[ редактировать ]Введение
[ редактировать ]Далее учтите тот факт, что, поскольку учащиеся неоднократно измеряют период колебаний маятника, они получают разные значения для каждого измерения. Эти колебания носят случайный характер: небольшие различия во времени реакции при работе с секундомером, различия в оценке момента достижения маятником максимального углового хода и т. д.; все эти вещи взаимодействуют, вызывая изменение измеряемой величины. Это не та ошибка, о которой говорилось выше, где предполагалось, что между показаниями секундомера и фактическим периодом T существует расхождение в 0,02 секунды . Смещение представляет собой фиксированную, постоянную величину; Случайные вариации — это всего лишь случайность и непредсказуемость.
Случайные изменения не предсказуемы, но они имеют тенденцию следовать некоторым правилам, и эти правила обычно обобщаются математической конструкцией, называемой функцией плотности вероятности (PDF). Эта функция, в свою очередь, имеет несколько параметров, которые очень полезны для описания изменений наблюдаемых измерений. Двумя такими параметрами являются среднее значение и дисперсия PDF. По сути, среднее значение — это расположение PDF на прямой числовой линии, а дисперсия — это описание разброса, дисперсии или ширины PDF.
Для иллюстрации на рисунке 1 показана так называемая Нормальная PDF , которая будет считаться распределением наблюдаемых периодов времени в эксперименте с маятником. Если на данный момент игнорировать все отклонения в измерениях, то среднее значение этой PDF будет соответствовать истинному значению T для идеализированного маятника длиной 0,5 метра, который имеет начальный угол 30 градусов, а именно, из уравнения (1), 1,443. секунды. представлено 10 000 смоделированных измерений На рисунке на гистограмме (которая сортирует данные по ячейкам небольшой ширины, чтобы показать форму распределения), а нормальный PDF представляет собой сплошную линию. Вертикальная линия — это среднее значение.
Интересная проблема случайных колебаний — это дисперсия. Положительный квадратный корень дисперсии определяется как стандартное отклонение и является мерой ширины PDF-файла; существуют и другие меры, но стандартное отклонение, обозначаемое греческой буквой σ «сигма», является наиболее часто используемым. сигма 0,03 секунды для измерений T Для этого моделирования использовалась ; измерения L и θ предполагали незначительную изменчивость.
На рисунке ширины одно-, двух- и трехсигмы обозначены вертикальными пунктирными линиями со стрелками. Видно, что ширина в три сигмы по обе стороны от среднего значения содержит почти все данные для нормального PDF. Диапазон наблюдаемых значений времени составляет примерно от 1,35 до 1,55 секунды, но большинство этих измерений времени попадают в более узкий интервал.
PDF-файл производной величины
[ редактировать ]На рис. 1 результаты измерений для множества повторных измерений периода маятника Т. представлены Предположим, что эти измерения использовались по одному в уравнении (2) для оценки g . Какова будет PDF этих оценок g ? Имея этот PDF, каковы среднее значение и дисперсия оценок g ? На этот вопрос непросто ответить, поэтому моделирование будет лучшим способом увидеть, что происходит. На рисунке 2 снова представлены 10 000 измерений T , которые затем используются в уравнении (2) для оценки g, и эти 10 000 оценок помещаются в гистограмму. Среднее значение (вертикальная черная линия) близко согласуется [4] с известным значением g 9,8 м/с. 2 .
Иногда возможно получить фактический PDF-файл преобразованных данных. В примере с маятником измерения времени T в уравнении (2) возводятся в квадрат и делятся на некоторые коэффициенты, которые на данный момент можно считать постоянными. Использование правил преобразования случайных величин [5] можно показать, что если измерения T имеют нормальное распределение, как на рисунке 1, то оценки g следуют другому (сложному) распределению, которое можно получить аналитически. Этот g -PDF построен с помощью гистограммы (черная линия), и согласие с данными очень хорошее. На рисунке 2 также показана кривая g -PDF (красная пунктирная линия) для смещенных значений T , которые использовались в предыдущем обсуждении систематической ошибки. Таким образом, среднее значение смещенного T g -PDF составляет 9,800–0,266 м/с. 2 (см. таблицу 1).
Рассмотрим еще раз, как это было сделано при обсуждении смещения выше, функцию

где f не обязательно должно быть, а часто и не является линейным, а x — это случайные величины, которые, как правило, не обязательно должны быть нормально распределены и которые, как правило, могут быть взаимно коррелированы. При анализе результатов эксперимента среднее значение и дисперсия полученной величины z, которая будет случайной величиной . интерес представляют Они определяются как ожидаемые значения
![{\displaystyle \mu _{z}\,\,=\,\,\,{\rm {E}}\,[z]\,\,\,\,\,\,\,\,\, \,\,\,\,\,\sigma _{z}^{2}\,\,\,=\,\,\,{\rm {E}}\,\left[{\left({ z\,\,-\,\,\mu _{z}}\right)^{2}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0ee3e7a3fa0bf5c367e932c694e11877236d164)
т. е. первый момент PDF относительно начала координат и второй момент PDF относительно среднего значения полученной случайной величины z . Эти ожидаемые значения находятся с использованием интеграла для рассматриваемых здесь непрерывных переменных. Однако для вычисления этих интегралов необходима функциональная форма PDF полученной величины z . Было отмечено, что [6]
- Точное вычисление [дисперсий] нелинейных функций переменных, подверженных ошибкам, вообще представляет собой задачу большой математической сложности. Фактически, значительная часть математической статистики связана с общей проблемой получения полного частотного распределения [PDF] таких функций, из которого затем можно получить [дисперсию].
Для иллюстрации простым примером этого процесса является нахождение среднего значения и дисперсии полученной величины z = x. 2 где измеренная величина x имеет нормальное распределение со средним значением µ и дисперсией σ. 2 . Полученная величина z будет иметь некоторую новую PDF-пространство, которую (иногда) можно найти с помощью правил вероятностного исчисления. [7] В этом случае с помощью этих правил можно показать, что PDF z будет
![{\displaystyle {\rm {PDF}}_{z}\,\,\,\sim \,\,\,{1 \over {2{\sqrt {z}}}}\,\,\,{ 1 \over {{\sqrt {2\pi }}\,\,\sigma }}\left[{\exp \left({-\,\,{{\left({{\sqrt {z}}- \mu }\right)^{2}} \over {2\,\sigma ^{2}}}}\right)\,\,\,+\,\,\,\exp \left({-\ ,\,{{\left({-{\sqrt {z}}-\mu }\right)^{2}} \over {2\,\sigma ^{2}}}}\right)}\right ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fc1260784cd4627ae01c36cef768c7de50a3b72c)
Интегрирование этого значения от нуля до положительной бесконечности возвращает единицу, что подтверждает, что это PDF-файл. Далее, необходимы среднее значение и дисперсия этой PDF, чтобы охарактеризовать полученную величину z . Среднее значение и дисперсия (на самом деле среднеквадратическая ошибка , различие, которое здесь не будет рассматриваться) находятся из интегралов

если эти функции вообще интегрируемы . Как это бывает в этом случае, возможны аналитические результаты, [8] и обнаружено, что

Эти результаты точны. Обратите внимание, что среднее (ожидаемое значение) z не является тем, что можно было бы логически ожидать, т. е. просто квадратом среднего значения x . Таким образом, даже при использовании, возможно, самой простой нелинейной функции, квадрата случайной величины, процесс нахождения среднего значения и дисперсии полученной величины сложен, а для более сложных функций можно с уверенностью сказать, что этот процесс непрактичен для анализ экспериментальных данных.
Как принято в подобных исследованиях, приведенные выше результаты можно проверить с помощью моделирования. На рисунке 3 показана гистограмма 10 000 выборок z , а также приведенный выше PDF-файл; соглашение отличное. В этом моделировании данные x имели среднее значение 10 и стандартное отклонение 2. Таким образом, наивное ожидаемое значение для z , конечно, будет 100. Вертикальная линия «смещенного среднего» находится с использованием приведенного выше выражения для μ z , и она хорошо согласуется с наблюдаемым средним значением (т. е. рассчитанным на основе данных; пунктирная вертикальная линия), а смещенное среднее значение превышает «ожидаемое» значение, равное 100. Пунктирная кривая, показанная на этом рисунке, представляет собой нормальную PDF-статистику, о которой мы поговорим позже.
Линеаризованные аппроксимации для среднего значения и дисперсии производной величины
[ редактировать ]Если, как это обычно бывает, PDF полученной величины не найден, и даже если PDF измеренных величин неизвестны, оказывается, что все же возможно оценить среднее значение и дисперсию (и, таким образом, , стандартное отклонение) производной величины. Это так называемый «дифференциальный метод». [9] будет описано далее. (Вывод уравнений (13) и (14) см. в этом разделе ниже.)
Как обычно в прикладной математике, одним из способов избежать сложности является аппроксимация функции другой, более простой функцией, и часто это делается с использованием разложения в ряд Тейлора низкого порядка . Это можно показать [10] что, если функция z заменяется разложением первого порядка относительно точки, определяемой средними значениями каждой из p переменных x , дисперсия линеаризованной функции аппроксимируется выражением

где σ ij представляет собой ковариацию двух переменных x i и x j . Двойная сумма берется по всем комбинациям i и j , понимая, что ковариация переменной сама по себе является дисперсией этой переменной, то есть σ ii = σ i 2 . Кроме того, ковариации симметричны, так что σ ij = σ ji . Опять же, как и в случае с расчетами систематической ошибки, частные производные оцениваются в определенной точке, в данном случае по среднему (среднему) значению или другой наилучшей оценке каждой из независимых переменных. Обратите внимание, что если f линейно, то и только тогда уравнение (13) является точным.
Ожидаемое значение (среднее значение) полученной PDF можно оценить для случая, когда z является функцией одной или двух измеряемых переменных, используя [11]

где частичные значения оцениваются по среднему значению соответствующей переменной измерения. (Для более чем двух входных переменных это уравнение расширяется, включая различные смешанные частичные значения.)
Возвращаясь к простому примеру z = x 2 среднее значение оценивается по
![{\displaystyle \mu _{z}\,\,\approx \,\,\mu ^{2}\,\,+\,\,\,{1 \over 2}\,\,\sigma ^{ 2}\,\,{{\partial ^{2}z} \over {\partial x^{2}}}\,\,\,=\,\,\,\mu ^{2}+\, \,\,{1 \over 2}\,\,\sigma ^{2}\,\,\left[2\right]\,\,\,\,=\,\,\,\mu ^{ 2}+\,\сигма ^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5722497c5a78218aaa5c32e2a30d07583489b4c1)
что совпадает с точным результатом в данном конкретном случае. Для дисперсии (фактически MS e )

который отличается только отсутствием последнего члена, который был в точном результате; поскольку σ должно быть мало по сравнению с µ , это не должно быть серьезной проблемой.
На рисунке 3 показана нормальная PDF (пунктирные линии) со средним значением и отклонением от этих аппроксимаций. Обычный PDF не очень хорошо описывает эти производные данные, особенно на нижнем уровне. Подставив известное среднее значение (10) и дисперсию (4) значений x в это моделирование или в выражения выше, видно, что приблизительная (1600) и точная (1632) дисперсии различаются лишь незначительно (2%).
Матричный формат дисперсионной аппроксимации
[ редактировать ]Более элегантный способ записи так называемого уравнения дисперсии «распространения ошибки» — использовать матрицы . [12] Сначала определите вектор частных производных, как это использовалось в уравнении (8) выше:

где верхний индекс T обозначает транспонирование матрицы; затем определите ковариационную матрицу

Тогда распространение аппроксимации ошибки можно кратко записать как квадратичную форму

Если все корреляции между p -переменными равны нулю, как часто предполагается, то ковариационная матрица C становится диагональной с отдельными дисперсиями вдоль главной диагонали. Еще раз подчеркнем: все части вектора γ оцениваются в определенной точке, так что уравнение (15) возвращает один числовой результат.
Будет полезно подробно выписать выражение для дисперсии с помощью уравнений (13) или (15) для случая p = 2. Это приводит к

что, поскольку последние два термина выше одно и то же,

Линеаризованная аппроксимация: простой пример дисперсии
[ редактировать ]Прежде чем вернуться к более сложному примеру с маятником, рассмотрим относительно простой алгебраический пример. Позволять

так что

Это выражение могло бы остаться в этой форме, но общепринятой практикой является деление на z. 2 поскольку это приведет к отмене многих факторов, а также даст более полезный результат:

что сводится к

стандартное отклонение z Поскольку обычно представляет интерес , его оценка равна

где использование средних (средних) переменных обозначено чертами, а караты указывают на то, что (ко)дисперсии компонентов также должны быть оценены, если только не имеется твердого априорного о них знания. Обычно это не так, поэтому оценщики

часто используются, [13] на основе n наблюдений (измерений).
Линеаризованное приближение: пример маятника, среднее значение
[ редактировать ]Для простоты будем рассматривать только измеренное время как случайную величину, так что полученная величина, оценка g , составит

где k собирает множители в уравнении (2), которые на данный момент являются постоянными. Опять же, применяя правила исчисления вероятностей, можно получить PDF для оценок g (этот PDF представлен на рисунке 2). В этом случае, в отличие от примера, использованного ранее, среднее значение и дисперсию не удалось найти аналитически. Таким образом, нет другого выбора, кроме как использовать линеаризованные аппроксимации. Для среднего значения, используя уравнение (14), с упрощенным уравнением для оценки g ,

Тогда ожидаемое значение оцененного g будет равно
![{\displaystyle {\rm {E}}[{\hat {g}}]\,\,\,=\,\,\,{k \over {\mu _{T}^{2}}}\ ,\,\,+\,\,\,{1 \over 2}\left({{6\,k} \over {\mu _{T}^{4}}}\right)\sigma _{ T}^{2}{\mathbf {\,\,\,\,\,\,\,\,\,\,\,\,\,\,Eq(16)} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b448eee92fed12848777080e2be58c6f979864d1)
где, если период маятника, умноженный на T , несмещен, первый член равен 9,80 м/с. 2 . Этот результат говорит о том, что среднее значение оцененных значений g сильно смещено. Это будет проверено с помощью моделирования ниже.
Линеаризованное приближение: пример маятника, дисперсия
[ редактировать ]Далее, чтобы найти оценку дисперсии для примера маятника, поскольку частные производные уже найдены в уравнении (10), все переменные вернутся к задаче. Частички переходят в вектор γ . Следуя обычной практике, особенно если нет доказательств обратного, предполагается, что все ковариации равны нулю, так что C диагональна. [14] Затем

Тот же результат получается с использованием уравнения (13). Следует подчеркнуть, что эти «сигмы» представляют собой дисперсии, которые описывают случайные изменения в измерениях L , T и θ ; их не следует путать с предубеждениями, использовавшимися ранее. Дисперсии (или стандартные отклонения) и систематические ошибки — это не одно и то же .
Чтобы проиллюстрировать этот расчет, рассмотрим результаты моделирования на рисунке 2. Здесь предполагалось, что только измерение времени имеет случайные отклонения, а стандартное отклонение, используемое для него, составляло 0,03 секунды. Таким образом, используя уравнение (17),

и, используя числовые значения, присвоенные ранее для этого примера,

что выгодно отличается от наблюдаемой дисперсии 0,171, рассчитанной программой моделирования. (Оценочные дисперсии имеют значительную изменчивость, и нельзя ожидать, что эти значения будут точно совпадать.) Для среднего значения уравнение (16) дает смещение всего около 0,01 м/с. 2 , чего не видно на рисунке 2.
Чтобы прояснить, что происходит при увеличении случайной ошибки в измеряемой переменной, рассмотрим рисунок 4, где стандартное отклонение измерений времени увеличивается до 0,15 с, или примерно десяти процентов. PDF для предполагаемых значений g также отображается в виде графика, как это было на рисунке 2; обратите внимание, что PDF для случая большего изменения во времени искажен, и теперь ясно видно смещенное среднее значение. Аппроксимированное (смещенное) среднее значение и среднее значение, наблюдаемое непосредственно на основе данных, хорошо согласуются. Пунктирная кривая представляет собой нормальную PDF со средним значением и отклонением от аппроксимаций; он не особенно хорошо представляет данные.
Линеаризованное приближение: пример маятника, относительная ошибка (точность)
[ редактировать ]Вместо дисперсии часто более полезной мерой является стандартное отклонение σ , и когда оно делится на среднее значение µ, мы получаем величину, называемую относительной ошибкой или коэффициентом вариации . Это мера точности :

Для примера с маятником это дает точность чуть более 4 процентов. Как и в случае систематической ошибки, полезно связать относительную ошибку полученной величины с относительной ошибкой измеренных величин. Разделим уравнение (17) на квадрат g :

и используйте результаты, полученные в результате расчетов смещения дробного изменения, чтобы получить (сравните с уравнением (12)):

Извлечение квадратного корня дает RE:

В примере это дает

что согласуется с полученным ранее RE. Этот метод, использующий относительные ошибки в компонентах (измеренных) величин, является более простым, если провести математические расчеты для получения соотношения, подобного уравнению (17). Напомним, что углы, используемые в уравнении (17), должны быть выражены в радианах.
стандартное отклонение оцененного g Если, как это часто бывает, необходимо само по себе , его легко получить путем простой перестановки уравнения (18). Это стандартное отклонение обычно указывается вместе с «точечной оценкой» среднего значения: для моделирования это будет 9,81 ± 0,41 м/с. 2 . К тому, что можно сделать из интервалов, указанных таким образом, необходимо относиться очень внимательно. Обсуждение этой важной темы выходит за рамки данной статьи, но довольно подробно этот вопрос рассмотрен в книге Натреллы. [15]
Линеаризованная аппроксимация: пример маятника, проверка моделирования
[ редактировать ]Хорошей практикой является проверка расчетов неопределенности с помощью моделирования . Эти расчеты могут быть очень сложными, и в них легко допустить ошибки. Например, чтобы проверить, правильна ли относительная ошибка только для измерения угла, была создана симуляция для выборки углов из нормального PDF-файла со средним значением 30 градусов и стандартным отклонением 5 градусов; оба преобразуются в радианы в симуляции. Относительная ошибка угла составляет тогда около 17 процентов. Согласно уравнению (18), относительная ошибка оценки g равна, если другие измерения имеют незначительные отклонения:

Моделирование показывает, что наблюдаемая относительная ошибка g составляет около 0,011, что демонстрирует правильность расчетов угловой неопределенности. Таким образом, как было видно при расчетах смещения, относительно большое случайное изменение начального угла (17 процентов) вызывает лишь около одного процента относительной ошибки в оценке g .
На рис. 5 показана гистограмма этих оценок g . Поскольку относительная ошибка угла была относительно большой, PDF оценок g искажена (не нормальна и не симметрична), а среднее значение слегка смещено. В этом случае PDF неизвестна, но среднее значение все равно можно оценить, используя уравнение (14). вторая часть угловой части уравнения (2), сохраняющая другие переменные как константы, собранные в k , равна Можно показать, что [8]
![{\displaystyle {{\partial ^{2}{\hat {g}}} \over {\partial \theta ^{2}}} \,\,\,=\,\,\,{k \over { 32}}\left[{9\cos \left({\mu _{\theta }}\right)\,\,\,-\,\,\,\cos \left({2\mu _{\ тета }}\right)}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a75c40a57ee98cee8f29efca1bbfc0b69e3e6da)
так что ожидаемое значение равно
![{\displaystyle {\rm {E}}[{\hat {g}}]\,\,\,\approx \,\,\,\,k\alpha \left({\mu _{\theta }} \right)\,\,\,+\,\,\,{1 \over 2}\,\,{k \over {32}}\left[{9\cos \left({\mu _{\ theta }}\right)\,\,\,-\,\,\,\cos \left({2\mu _{\theta }}\right)}\right]\sigma _{\theta }^{ 2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2282240a0ab1440d67b0d0a11f1d92831a71da5c)
и пунктирная вертикальная линия, полученная в результате этого уравнения, соответствует наблюдаемому среднему значению.
Выбор метода анализа данных
[ редактировать ]Введение
[ редактировать ]Во введении упоминалось, что существует два способа анализа совокупности измерений периода колебаний Т маятника:
- Метод 1 : усредните n измерений T , используйте это среднее значение в уравнении (2), чтобы получить окончательную g ; оценку
- Метод 2 : используйте все n отдельных измерений T в уравнении (2) по одному, чтобы получить n оценок g , усредните их для получения окончательной оценки g .
Было бы разумно предположить, что это будет одно и то же и что нет причин отдавать предпочтение одному методу перед другим. Однако метод 2 приводит к смещению, которое не устраняется увеличением размера выборки. Метод 1 также является предвзятым, но это смещение уменьшается с увеличением размера выборки. Эта предвзятость в обоих случаях не особенно велика, и ее не следует путать с предвзятостью, которая обсуждалась в первом разделе. То, что можно было бы назвать «систематической ошибкой I типа», является результатом систематической ошибки в процессе измерения; «Смещение типа II» возникает в результате преобразования случайной величины измерения с помощью нелинейной модели; здесь уравнение (2).
Смещение типа II характеризуется членами после первого в уравнении (14). Как было рассчитано для моделирования на рисунке 4, смещение оценки g при разумной изменчивости измеренного времени (0,03 с) получено из уравнения (16) и составило всего около 0,01 м/с. 2 . Переставляя часть смещения (второй член) уравнения (16) и используя β для смещения,

используя пример параметров маятника. Отсюда видно, что смещение изменяется пропорционально квадрату относительной ошибки за период Т ; для большей относительной ошибки, около десяти процентов, погрешность составляет около 0,32 м/с. 2 , что вызывает большее беспокойство.
Размер выборки
[ редактировать ]Чего здесь не хватает и чего намеренно избегали во всем предыдущем материале, так это влияния размера выборки на эти расчеты. Число измерений n до сих пор не фигурировало ни в одном уравнении. Неявно, весь анализ проводился для подхода Метода 2, при котором за раз производилось одно измерение (например, T ) и обрабатывалось его с помощью уравнения (2) для получения оценки g .
Чтобы использовать различные уравнения, разработанные выше, необходимы значения среднего и дисперсии нескольких параметров, которые появляются в этих уравнениях. В практических экспериментах эти величины будут оцениваться по данным наблюдений, т. е. измерений. Эти измерения усредняются для получения расчетных средних значений, которые можно использовать в уравнениях, например, для оценки частных производных. Таким образом, интересующая дисперсия — это дисперсия среднего значения , а не генеральной совокупности, и поэтому, например,

что отражает тот факт, что с увеличением количества измерений T дисперсия среднего значения T будет уменьшаться. присуща некоторая изменчивость Измерениям T , и предполагается, что она остается постоянной, но изменчивость среднего значения T будет уменьшаться по мере увеличения n . Предполагая отсутствие ковариации среди параметров (измерений), разложение уравнения (13) или (15) можно переформулировать как

где нижний индекс n отражает тот факт, что для нескольких переменных может быть выполнено разное количество измерений (например, 3 для L , 10 для T , 5 для θ и т. д.)
Эта зависимость общей дисперсии от количества измерений подразумевает, что компонентом статистического плана эксперимента будет определение размеров выборки, чтобы поддерживать общую относительную ошибку (точность) в некоторых разумных пределах. Имея оценку вариабельности отдельных измерений, возможно, в результате пилотного исследования, можно будет оценить, какие размеры выборки (количество повторов для измерения, например, T в примере с маятником) потребуются.
Возвращаясь к смещению типа II в подходе метода 2, уравнение (19) теперь можно более точно переформулировать как

где s — расчетное стандартное отклонение n T T. измерений В методе 2 каждое отдельное измерение T используется для оценки g , так что n T для этого подхода = 1. С другой стороны, для метода 1 измерения T сначала усредняются перед использованием уравнения (2), так что n T больше единицы. Это означает, что

в котором говорится, что смещение типа II в методе 2 не уменьшается с увеличением размера выборки ; это постоянно. дисперсия оценки g С другой стороны, в обоих случаях равна

потому что в обоих методах измерения n T используются для формирования средней оценки g . [16] Таким образом, дисперсия уменьшается с увеличением размера выборки для обоих методов.
Эти эффекты проиллюстрированы на рисунках 6 и 7. На рисунке 6 представлена серия PDF-файлов метода 2 с оценками g для сравнительно большой относительной ошибки в измерениях T при различных размерах выборки. Относительная ошибка T больше, чем это могло бы быть разумно, поэтому эффект систематической ошибки может быть более четко виден. На рисунке точками показано среднее значение; смещение очевидно и не меняется с увеличением n. Дисперсия или ширина PDF-файла становится меньше с увеличением n , и PDF-файл также становится более симметричным. На рисунке 7 представлены PDF-файлы для метода 1, и видно, что средние значения сходятся к правильному значению g, равному 9,8 м/с. 2 По мере увеличения количества измерений дисперсия также уменьшается.
Из этого делается вывод, что метод 1 является предпочтительным подходом к обработке маятника или других данных.
Обсуждение
[ редактировать ]Систематические ошибки в измерении экспериментальных величин приводят к смещению полученной величины, величина которой рассчитывается с использованием уравнения (6) или уравнения (7). Однако существует и более тонкая форма смещения, которая может возникнуть, даже если измеряемые входные величины несмещены; все члены после первого в уравнении (14) представляют это смещение. Он возникает в результате нелинейных преобразований случайных величин, которые часто применяются при получении производной величины. На смещение преобразования влияет относительный размер отклонения измеряемой величины по сравнению с ее средним значением. Чем больше это соотношение, тем более искаженной может быть PDF производной величины и тем больше может быть систематической ошибки.
Аппроксимации ряда Тейлора обеспечивают очень полезный способ оценки как систематической ошибки, так и изменчивости в случаях, когда PDF полученной величины неизвестна или трудно поддается измерению. Среднее значение можно оценить с помощью уравнения (14), а дисперсию — с помощью уравнения (13) или уравнения (15). Однако существуют ситуации, в которых этот подход к аппроксимации рядами Тейлора первого порядка не подходит, особенно если какая-либо из составляющих переменных может исчезнуть. Тогда разложение второго порядка было бы полезно ; увидеть Мейера [17] для соответствующих выражений.
Размер выборки является важным фактором при планировании эксперимента. Чтобы проиллюстрировать влияние размера выборки, уравнение (18) можно переписать как

средние значения (столбики) и расчетные стандартные отклонения s где показаны , а также соответствующие размеры выборки. В принципе, используя очень большое n, RE предполагаемого g можно снизить до сколь угодно малого значения. Однако часто существуют ограничения или практические причины относительно небольшого количества измерений.
Подробности, касающиеся разницы между дисперсией и среднеквадратической ошибкой (MSe), были пропущены. По сути, MSe оценивает изменчивость истинного (но неизвестного) среднего значения распределения. Эта изменчивость состоит из (1) изменчивости фактического наблюдаемого среднего значения и (2) термина, который объясняет, насколько далеко это наблюдаемое среднее значение отличается от истинного среднего значения. Таким образом

где β — смещение (расстояние). Это статистическое применение теоремы о параллельных осях из механики . [18]
Таким образом, линеаризованная аппроксимация ожидаемого значения (среднего значения) и дисперсии нелинейно преобразованной случайной величины очень полезна и намного проще в применении, чем более сложный процесс определения ее PDF, а затем ее первых двух моментов. Во многих случаях последний подход вообще невозможен. Математика линеаризованного приближения нетривиальна, и ее можно избежать, используя результаты, собранные для часто встречающихся функций случайных величин. [19]
Вывод уравнений распространения ошибок
[ редактировать ]Краткое описание процедуры
[ редактировать ]- Учитывая функцию z нескольких случайных величин x среднее значение и дисперсия z . , ищутся
- Прямой подход состоит в том, чтобы найти PDF z , а затем найти его среднее значение и дисперсию:
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\int {z\,\,{\rm {PDF}}_{z}}\,\, dz\,\,\,\,\,\,\,\,\,\,\,\,\,{\rm {Var}}[z]\,\,=\,\,\int {\ left({z-{\rm {E}}[z]}\right)^{2}\,\,{\rm {PDF}}_{z}}\,\,dz}](https://wikimedia.org/api/rest_v1/media/math/render/svg/232daf6eb74e3d2bbd387a5e3b00446c5c91a380)
3. Нахождение PDF-файла является нетривиальной задачей, а в некоторых случаях может быть даже невозможной и, конечно, не является практическим методом для обычных целей анализа данных. Даже если PDF-файл удастся найти, найти моменты (выше) может быть сложно.
4. Решение состоит в том, чтобы разложить функцию z в второго порядка ряд Тейлора ; разложение делается вокруг средних значений нескольких переменных x . (Обычно разложение выполняется до первого порядка; члены второго порядка необходимы, чтобы найти смещение среднего значения. Эти члены второго порядка обычно отбрасываются при нахождении дисперсии; см. ниже).
5. Имея в виду расширение, найдите ожидаемое значение. Это даст аппроксимацию среднего значения z и будет включать термины, которые отражают любое смещение. По сути, расширение «изолирует» случайные величины x , чтобы можно было найти их ожидания.
6. Имея выражение для ожидаемого значения z , которое будет включать частные производные, а также средние и дисперсии случайных величин x , создайте выражение для ожидания дисперсии:
![{\displaystyle {\rm {Var}}[z]\,\,\,\equiv \,\,{\rm {E}}\left[{\left({\,z\,\,-\, \,{\rm {E}}[z]\,}\right)^{2}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e6e5e0ef31113e96028643852b95266811e25104)
то есть найдите ( z − E[ z ] ) и выполните необходимую алгебру , чтобы собрать термины и упростить.
7. Для большинства целей достаточно сохранить только члены первого порядка; возведите эту величину в квадрат.
8. Найдите ожидаемое значение этого результата. Это будет аппроксимация дисперсии z .
Многомерный ряд Тейлора
[ редактировать ]Это фундаментальное соотношение для разложения второго порядка, используемого в приближениях: [20]

Пример расширения: p = 2
[ редактировать ]Чтобы уменьшить беспорядок в обозначениях, символы средней оценки не отображаются:

что сводится к

Приближение среднего значения z
[ редактировать ]Используя предыдущий результат, примите ожидаемые значения:
![{\displaystyle {\rm {E}}\left[{z\left({{\bar {x}}_{1}\,\,\,{\bar {x}}_{2}}\right )}\right]\,\,\,=\,\,\,z\left({\mu _{1}\,\,\,\mu _{2}\,}\right)\,\ ,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,{\rm {E}}\left[{{{\partial z} \over {\partial x_{1}}}\left({x_{1}-\,\,{\bar {x}}_{1}}\right)}\right]\,\,\,\,\ ,=\,\,\,\,\,{{\partial z} \over {\partial x_{1}}}{\rm {E}}\left[{\left({x_{1}-\ ,\,{\bar {x}}_{1}}\right)}\right]\,\,\,=\,\,0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ad6a396dfba0b80296bf6e1ac192c368b79ffd2)
и аналогично для x 2 . Частные значения выходят за рамки ожиданий, поскольку при оценке соответствующих средних значений они будут константами. Нулевой результат, приведенный выше, следует из того, что ожидаемое значение суммы или разности является суммой или разностью ожидаемых значений, так что для любого i
![{\displaystyle {\rm {E}}\left[{x_{i}-{\bar {x}}_{i}}\right]\,\,\,=\,\,\,{\rm {E}}\left[{x_{i}}\right]\,\,\,-\,\,\,{\rm {E}}\left[{{\bar {x}}_{i }}\right]\,\,\,=\,\,\,\mu _{i}-\,\,\mu _{i}\,\,\,=\,\,\,0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3aee2169b478341a4c2556cf85d0bfda77b33953)
Продолжая,
![{\displaystyle {\rm {E}}\left[{{1 \over 2}{{\partial ^{2}z} \over {\partial x_{1}^{2}}}\left({x_ {1}-\,\,{\bar {x}}_{1}}\right)^{2}}\right]\,\,\,=\,\,\,{1 \over 2} \,{{\partial ^{2}z} \over {\partial x_{1}^{2}}}\,{\rm {E}}\left[{\left({x_{1}-\ ,\,{\bar {x}}_{1}}\right)^{2}}\right]\,\,\,=\,\,\,{1 \over 2}\,{{\ частичный ^{2}z} \over {\partial x_{1}^{2}}}\sigma _{1}^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3946371042d2d61cc8fd36c184c8d1593346408)
и аналогично для x 2 . Окончательно,
![{\displaystyle {\rm {E}}\left[{{{\partial ^{2}z} \over {\partial x_{1}\partial x_{2}}}\left({x_{1}- \,\,{\bar {x}}_{1}}\right)\left({x_{2}-\,\,{\bar {x}}_{2}}\right)}\right ]\,\,\,=\,\,\,{{\partial ^{2}z} \over {\partial x_{1}\partial x_{2}}}\,{\rm {E}} \left[{\left({x_{1}-\,\,{\bar {x}}_{1}}\right)\left({x_{2}-\,\,{\bar {x }}_{2}}\right)}\right]\,\,\,=\,\,\,{{\partial ^{2}z} \over {\partial x_{1}\partial x_{ 2}}}\сигма _{1,2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f8ac29b5f41368b08f31cfec3a6c44bbebe51558)
где σ 1,2 — ковариация x 1 и x 2 . (Это часто считается равным нулю, правильно это или нет.) Тогда выражение для аппроксимации среднего значения полученной случайной величины z имеет вид
![{\displaystyle {\rm {E}}[z]\approx \,\,\,z\left({\mu _{1}\,\,\mu _{2}}\right)\,\, \,+\,\,\,{1 \over 2}\left\{{{{\partial ^{2}z} \over {\partial x_{1}^{2}}}\,\,\ сигма _{1}^{2}\,\,+\,\,\,{{\partial ^{2}z} \over {\partial x_{2}^{2}}}\,\,\ сигма _{2}^{2}}\right\}\,\,\,+\,\,\,{{\partial ^{2}z} \over {\partial x_{1}\partial x_{ 2}}}\,\,\сигма _{1,2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c60e4f55bcced559e33d6e30d99a9ddec64a7be8)
где все члены после первого представляют смещение в z . Это уравнение необходимо для нахождения дисперсионного приближения, но оно полезно само по себе; примечательно, что оно не встречается в большинстве текстов по анализу данных.
Аппроксимация дисперсии z
[ редактировать ]Следующим шагом из определения дисперсии будет вычитание только что найденного ожидаемого значения из разложения z, найденного ранее. Это приводит к
![{\displaystyle {\begin{array}{l}\left({z- {\rm {E}}[z]}\right)^{2}\approx \,\,\,\left[{\begin {array}{l}\left\{{{\frac {\partial z}{\partial x_{1}}}\left({x_{1}-\,\,{\bar {x}}_{ 1}}\right)\,\,+\,\,\,{\frac {\partial z}{\partial x_{2}}}\left({x_{2}-\,\,{\bar {x}}_{2}}\right)}\right\}\,\,\,+\\\,\,\,{\frac {\partial ^{2}z}{\partial x_{1 }\partial x_{2}}}\left[{\left({x_{1}-\,\,{\bar {x}}_{1}}\right)\left({x_{2}- \,\,{\bar {x}}_{2}}\right)\,\,-\,\,\sigma _{1,2}}\right]\,\,\,+\\\ ,\,\,{\frac {1}{2}}{\frac {\partial ^{2}z}{\partial x_{1}^{2}}}\left[{\left({x_{ 1}-\,\,{\bar {x}}_{1}}\right)^{2}-\,\,\sigma _{1}^{2}}\right]\,\,\ ,+\,\,\,{\frac {1}{2}}{\frac {\partial ^{2}z}{\partial x_{2}^{2}}}\left[{\left( {x_{2}-\,\,{\bar {x}}_{2}}\right)^{2}-\,\,\sigma _{2}^{2}}\right]\\ \end{array}}\right]^{2}\\\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\ ,\,\,\,\,\,\,\,\,\,\,\,\\\end{массив}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c64465811a1d6cdd257c1c19095fbafd8a5eda44)
Очевидно, что рассмотрение членов второго порядка приведет к очень сложному и непрактичному результату (хотя, если члены первого порядка исчезнут, потребуется использование всех приведенных выше членов; см. Мейер, стр. 46). Следовательно, возьмем только линейные члены (в фигурных скобках) и квадратные:
![{\displaystyle \left({z\,\,-\,\,{\rm {E}}[z]}\right)^{2}\approx \,\,\,\left({\frac { \partial z}{\partial x_{1}}}\right)^{2}\left({x_{1}-{\bar {x}}_{1}}\right)^{2}\, \,+\,\,\,\,\left({\frac {\partial z}{\partial x_{2}}}\right)^{2}\left({x_{2}-{\bar {x}}_{2}}\right)^{2}\,\,+\,\,\,2\left({\frac {\partial z}{\partial x_{1}}}\right )\left({\frac {\partial z}{\partial x_{2}}}\right)\left({x_{1}-{\bar {x}}_{1}}\right)\left ({x_{2}-{\bar {x}}_{2}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/828f3737e50e569ac16997909976dcb695a251ba)
Последний шаг — принять ожидаемое значение этого
![{\displaystyle {\begin{array}{l}{\rm {Var}}[z]\,\,\equiv \, {\rm {E}}\left[{\left({z\,\, -\,\,{\rm {E}}[z]}\right)^{2}}\right]\,\,\,\approx \,\,\,\left({\frac {\partial z}{\partial x_{1}}}\right)^{2}{\rm {E}}\left[{\left({x_{1}-{\bar {x}}_{1}} \right)^{2}}\right]\,\,+\\\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, \,\,\,\,\left({\frac {\partial z}{\partial x_{2}}}\right)^{2}{\rm {E}}\left[{\left({ x_{2}-{\bar {x}}_{2}}\right)^{2}}\right]\,\,\,\,\,+\,\,\,\,2\left ({\frac {\partial z}{\partial x_{1}}}\right)\left({\frac {\partial z}{\partial x_{2}}}\right){\rm {E} }\left[{\left({x_{1}-{\bar {x}}_{1}}\right)\left({x_{2}-{\bar {x}}_{2}} \right)}\right]\\\end{массив}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a5463317a6c868d655d6ba1fd66fafa72ca368b)
что приводит к известному результату
![{\displaystyle {\rm {Var}}[z]\,\,\,\,\approx \,\,\,\left({\frac {\partial z}{\partial x_{1}}}\ right)^{2}\sigma _{1}^{2}\,\,\,+\,\,\,\,\left({\frac {\partial z}{\partial x_{2}} }\right)^{2}\sigma _{2}^{2}\,\,\,+\,\,\,\,2\left({\frac {\partial z}{\partial x_{ 1}}}\right)\left({\frac {\partial z}{\partial x_{2}}}\right)\sigma _{1,2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91022d275ca7d5cfcffa1ddf4b7d9d21f47b8992)
и это обобщается для p переменных как обычная формула «распространения ошибки»
![{\displaystyle {\rm {Var}}[z]\,\,\,\approx \,\,\,\sum \limits _ {i=1}^{p}{\sum \limits _{j= 1}^{p}{\left({\frac {\partial z}{\partial x_{i}}}\right)}}\left({\frac {\partial z}{\partial x_{j} }}\right)\sigma _{i,j}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ba7194f56e65bdc6f04d09f0e7cce4fcb271833)
с пониманием того, что ковариация переменной сама по себе является ее дисперсией. Важно понимать, что все эти частные производные должны оцениваться по среднему значению соответствующих переменных x , и что соответствующие дисперсии являются дисперсиями этих средних значений . Чтобы укрепить это,
![{\displaystyle {\rm {E}}[z]\approx \,\,\,z\left({{\bar {x}}_{1}\,\,{\bar {x}}_{ 2}}\right)\,\,\,+\,\,\,{\frac {1}{2}}\left\{{\left.{\frac {\partial ^{2}z}{ \partial x_{1}^{2}}}\right|_{{\bar {x}}_{1}}\,\,{\sigma _{1}^{2} \over n_{1} }\,\,\,\,+\,\,\,\,\,\left.{\frac {\partial ^{2}z}{\partial x_{2}^{2}}}\right |_{{\bar {x}}_{2}}\,{\sigma _{2}^{2} \over n_{2}}}\right\}\,\,\,+\,\ ,\,\,\left.{\frac {\partial ^{2}z}{\partial x_{1}\partial x_{2}}}\right|_{{\bar {x}}_{1 },{\bar {x}}_{2}}\,\,{\sigma _{1,2} \over n_{1,2}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ec26fa7fa6b7e109f74374cffbf2ac3ec03714a)
![{\displaystyle {\rm {Var}}[z]\,\,\,\приблизительно \,\,\,\sum \limits _ {i = 1}^{p}{\,\sum \limits _ { j=1}^{p}{\,\left({\frac {\partial z}{\partial x_{i}}}\right)_{{\bar {x}}_{i}}}} \left({\frac {\partial z}{\partial x_{j}}}\right)_{{\bar {x}}_{j}}{\sigma _{i,j} \over n_{ я, дж}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bcf2e20ca9fcd47d6c3821a29ccb5759b17e494b)
Таблица избранных уравнений неопределенности
[ редактировать ]Одномерный случай 1
[ редактировать ]
ПРИМЕЧАНИЯ: r может быть целым или дробным, положительным или отрицательным (или нулевым). Если r отрицательно, убедитесь, что диапазон x не включает ноль. Если r дробное число с четным делителем, убедитесь, что x не является отрицательным. «n» — размер выборки. Эти выражения основаны на анализе данных «Метода 1», где наблюдаемые значения x усредняются перед применением преобразования (т. е. в данном случае возведением в степень и умножением на константу).
Смещение I типа, абсолютное............................. ............................Уравнение(1.1)

Смещение I рода, относительное (дробное)............................ ..............Уравнение(1.2)

Среднее (ожидаемое значение)............................. ........................Уравнение(1.3)
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\mu _{z}\approx \,\,a\mu ^{r}\,\,\ ,+\,\,\,{1 \over 2}a\,r\left({r-1}\right)\,\,\mu ^{r-2}\,\,{{\sigma ^ {2}} \более n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/48f37a5b4afca22b7e5d4c49f67d211a592f2fe7)
Смещение типа II, абсолютное............................. ........................Уравнение(1.4)

Смещение типа II, дробное............................. ........................Уравнение(1.5)

Дисперсия, абсолютная............................................... ............................Уравнение(1.6)

Стандартное отклонение, дробное............................. .............Уравнение(1.7)

Комментарии:
- (1) На уравнения смещения типа I 1.1 и 1.2 не влияет размер выборки n .
- (2) Уравнение (1.4) представляет собой перестановку второго члена в уравнении (1.3).
- (3) Смещение типа II, дисперсия и стандартное отклонение уменьшаются с увеличением размера выборки, а также уменьшаются для данного размера выборки, когда стандартное отклонение x σ становится малым по сравнению с его средним значением μ .
Одномерный случай 2
[ редактировать ]
ПРИМЕЧАНИЯ: b может быть положительным или отрицательным. «n» — размер выборки. Имейте в виду, что эффективность этих приближений очень сильно зависит от относительных размеров μ, σ и b.
Смещение I типа, абсолютное............................. ............................Уравнение(2.1)

Смещение I типа, относительное (дробное)............................. ..............Уравнение(2.2)

Среднее (ожидаемое значение)............................. ........................Уравнение(2.3)
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\mu _ {z} \approx \,\,ae^{b\,\mu }\,\ ,\,+\,\,\,{\frac {1}{2}}\,\,a\,b^{2}e^{b\,\mu }\,\,{\frac {\ сигма ^{2}}{n}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0ea099927e42451dc088f5a2b660c20e750a9448)
Смещение типа II, абсолютное............................. ........................Уравнение(2.4)

Смещение типа II, дробное............................. ........................Уравнение(2.5)

Дисперсия, абсолютная............................................... ............................Уравнение(2.6)

Стандартное отклонение, дробное............................. .............Уравнение(2.7)

Одномерный случай 3
[ редактировать ]
ПРИМЕЧАНИЯ: b и x должны быть положительными. «n» — размер выборки. Имейте в виду, что эффективность этих приближений очень сильно зависит от относительных размеров μ, σ и b.
Смещение I типа, абсолютное............................. ............................Уравнение(3.1)

Смещение I типа, относительное (дробное)............................ ..............Уравнение(3.2)

Среднее (ожидаемое значение)............................. ........................Уравнение(3.3)
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\mu _ {z} \approx \,\,a\ln(b\mu)\,\, \,-\,\,\,\,{\frac {1}{2}}\,\,{\frac {a}{\mu ^{2}}}\,\,{\frac {\sigma ^{2}}{n}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d48708f098040da3dd8fa00050c2dd02bdb9cf9c)
Смещение типа II, абсолютное............................. ........................Уравнение(3.4)

Смещение типа II, дробное............................. ........................Уравнение(3.5)

Дисперсия, абсолютная............................................... ............................Уравнение(3.6)

Стандартное отклонение, дробное............................. .............Уравнение(3.7)

Многомерный случай 1
[ редактировать ]![{\displaystyle z\,\,=\,\,a\,x_{1}\,+\,\,b\,x_{2}\,\,\,\,\,\,\,\, \,\,\left[{x_{1}\,\,x_{2}}\right]\,\,\sim \,\,BVN\left({\mu _{1},\,\, \mu _{2},\,\,\sigma _{1}^{2},\,\,\sigma _{2}^{2},\,\,\sigma _{1,2}} \right)\,\,\,\,\,\,\,a,b\,\,{\rm {константы}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/87554bcdbe6904b013ec7b92f83852537648d2c4)
ПРИМЕЧАНИЯ. BVN — это двумерный обычный PDF. «n» — размер выборки.
Смещение I типа, абсолютное............................. ............................Уравнение(4.1)

Смещение I типа, относительное (дробное)............................ ..............Уравнение(4.2)

Среднее (ожидаемое значение)............................. ........................Уравнение(4.3)
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\mu _ {z}\,\,\approx \,\,\,\,a\mu _ {1}+\,\,b\mu _{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a57a9617eb0c3bda20eaee1da3a54999f115a10d)
Смещение типа II, абсолютное............................. ........................Уравнение(4.4)

Смещение типа II, дробное............................. ........................Уравнение(4.5)

Дисперсия, абсолютная............................................... ............................Уравнение(4.6)
![{\displaystyle \sigma _{z}^{2}\approx \,\,\,{\frac {1}{n}}\,\,\left[{a^{2}\sigma _{1} ^{2}\,\,+\,\,\,b^{2}\sigma _{2}^{2}\,\,\,+\,\,\,2\,a\,b \,\sigma _{1,2}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fe4980c561c323cc07cdcede9320475518f42ce)
Стандартное отклонение, дробное............................. .............Уравнение(4.7)
Это сложно, бессмысленно, не упрощает ни к чему полезному; использовать (4.6)
Многомерный случай 2
[ редактировать ]![{\displaystyle z\,\,=\,\,a\,\,x_{1}^{\alpha }\,x_{2}^{\beta }\,\,\,\,\,\, \,\,\,\,\left[{x_{1}\,\,x_{2}}\right]\,\,\sim \,\,BVN\left({\mu _{1}, \,\,\mu _{2},\,\,\sigma _{1}^{2},\,\,\sigma _{2}^{2},\,\,\sigma _{1 ,2}}\right)\,\,\,\,\,\,\,\alpha ,\beta \,\,{\rm {константы}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf64958cac096e19ff5a8ce2cf5710a8ae34a891)
Смещение I типа, абсолютное............................. ............................Уравнение(5.1)

Смещение I типа, относительное (дробное)............................. ..............Уравнение(5.2)

Среднее (ожидаемое значение)............................. ........................Уравнение(5.3)
![{\displaystyle {\rm {E}}[z]\,\,\,=\,\,\,\mu _ {z}\,\,\approx \,\,\,\,a\mu _ {1}^{\alpha }\mu _{2}^{\beta }\,\,+\,\,\,{\frac {a}{2n}}\left[{\begin{array}{ l}\left({\alpha \left({\alpha -1}\right)\mu _{1}^{\alpha -2}\mu _{2}^{\beta }}\right)\sigma _{1}^{2}+\\\left({\beta \left({\beta -1}\right)\mu _{1}^{\alpha }\mu _{2}^{\beta -2}}\right)\sigma _{2}^{2}+\\\left({2\,\alpha \,\beta \,\mu _{1}^{\alpha -1}\, \mu _{2}^{\beta -1}}\right)\sigma _{1,2}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0a34e21fb873707a4f9963f886387a66d4f5323)
Смещение типа II, абсолютное............................. ........................Уравнение(5.4)
![{\displaystyle \beta \,\,\,\,\approx \,\,\,\,{\frac {a}{2n}}\left[{\begin{array}{l}\left({\ альфа \left({\alpha -1}\right)\mu _{1}^{\alpha -2}\mu _{2}^{\beta }}\right)\sigma _{1}^{2 }+\\\left({\beta \left({\beta -1}\right)\mu _{1}^{\alpha }\mu _{2}^{\beta -2}}\right) \sigma _{2}^{2}+\\\left({2\,\alpha \,\beta \,\mu _{1}^{\alpha -1}\,\mu _{2}^ {\beta -1}}\right)\sigma _{1,2}\\\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89318d4667cea9987815d658749305d1acf2581a)
Смещение типа II, дробное............................. ........................Уравнение(5.5)
![{\displaystyle {\frac {\beta }{z}}\,\,\,=\,\,\,{\frac {1}{2n}}\left[{\alpha \left({\alpha - 1}\right)\left({\frac {\sigma _{1}}{\mu _{1}}}\right)^{2}+\,\,\,\beta \left({\beta -1}\right)\left({\frac {\sigma _{2}}{\mu _{2}}}\right)^{2}\,\,+\,\,\,\,2 \,\alpha \,\beta \left({\frac {\sigma _{1,2}}{\mu _{1}\,\mu _{2}}}\right)\,}\right] }](https://wikimedia.org/api/rest_v1/media/math/render/svg/504e73eec178b3cf327de43b03a076df36f88383)
Дисперсия, абсолютная............................................... ............................Уравнение(5.6)
![{\displaystyle \sigma _{z}^{2}\approx \,\,\,{\frac {a^{2}}{n}}\,\,\left[{\left(\alpha \, \mu _{1}^{\alpha -1}\mu _{2}^{\beta }\right)^{2}\sigma _{1}^{2}\,\,\,+\, \,\,\left(\beta \,\mu _{1}^{\alpha }\mu _{2}^{\beta -1}\right)^{2}\sigma _{2}^{ 2}\,\,\,+\,\,\,\left(2\alpha \,\beta \,\mu _{1}^{2\alpha -1}\mu _{2}^{2 \beta -1}\right)\sigma _{1,2}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d13e3f87c69a07fb75f0f4f5d0444b5b135784d)
Стандартное отклонение, дробное............................. .............Уравнение(5.7)

Галерея рисунков
[ редактировать ] Рисунок 1
Рисунок 1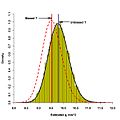 Рисунок 2
Рисунок 2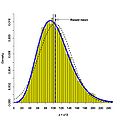 Рисунок 3
Рисунок 3 Рисунок 4
Рисунок 4 Рисунок 5
Рисунок 5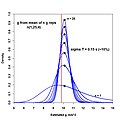 Рисунок 6
Рисунок 6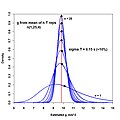 Рисунок 7
Рисунок 7







См. также
[ редактировать ]- Анализ чувствительности
- Распространение неопределенности
- Анализ неопределенности
- Непредвзятая оценка стандартного отклонения
- Интервальный конечный элемент
Ссылки
[ редактировать ]- ^ Точный период требует эллиптического интеграла; см., например, Тененбаум; Поллард (1985). Обыкновенные дифференциальные уравнения (Переиздание). Нью-Йорк: Дувр. п. 333 . ISBN 0486649407 . Это приближение также встречается во многих учебниках физики для студентов, основанных на исчислении.
- ^ Например, Томас и Финни, Исчисление , 9-е изд., Аддисон-Уэсли (1996), стр.940; Стюарт, Многомерное исчисление , 3-е изд., Brooks/Cole (1995), стр.790.
- ^ Томас, с. 937
- ^ Фактически, существует небольшая погрешность, которой можно пренебречь при достаточно малых значениях стандартного отклонения измерений времени.
- ^ Мейер, С.Л., Анализ данных для ученых и инженеров , Wiley (1975), стр. 148
- ^ Мандель, Дж., Статистический анализ экспериментальных данных , Дувр (1984), стр. 73
- ^ Мейер, стр. 147–151.
- ↑ Перейти обратно: Перейти обратно: а б Использование Математики .
- ^ Деминг, WE, Некоторые теории выборки , Wiley (1950), стр.130. См. эту ссылку для интересного вывода этого материала.
- ^ Мандель, с. 74. Деминг, с. 130. Мейер, с. 40. Бевингтон, Робинсон, Сокращение данных и анализ ошибок для физических наук , 2-е изд. МакГроу-Хилл (1992), с. 43. Боукер и Либерман, Инженерная статистика , 2-е изд. Прентис-Холл (1972), с. 94. Рохатги, Статистический вывод , Дувр (2003), стр. 267–270 очень актуален, включая материалы по поиску ожидаемого значения (среднего значения) в дополнение к дисперсии.
- ^ Рохатги, стр.268.
- ^ Уолтер, К.М., Введение в оценку дисперсии , Springer (1985), стр. 225–228.
- ^ Эти оценки имеют некоторую погрешность, особенно для небольших размеров выборки, которую можно исправить. См., например, Рохатги, стр. 524–525.
- ^ Это предположение следует тщательно оценить на предмет реальных проблем. Неправильное игнорирование ковариаций может отрицательно повлиять на выводы.
- ^ Натрелла, М.Г., Экспериментальная статистика , Справочник NBS 91 (1963), гл. 23. Эта книга была переиздана и в настоящее время доступна.
- ^ Более подробное обсуждение этой темы и того, почему n влияет на дисперсию, а не на среднее значение, см. в Рохатги, стр. 267–270.
- ^ Мейер, стр. 45–46.
- ^ См., например, Деминг, с. 129–130 или Линдгрен, Б.В., Статистическая теория , 3-е изд., Macmillan (1976), стр. 129–130. 254.
- ^ Например, Мейер, стр. 40–45; Бевингтон, стр. 43–48
- ^ Г. А. Корн и Т. М. Корн , Математический справочник для ученых и инженеров , Дувр (переиздание 2000 г.), стр. 134.
Внешние ссылки
[ редактировать ]- Интерактивная графика Java , иллюстрирующая различия в обработке метода 1 и метода 2.