Система предотвращения дорожно-транспортных происшествий
Система предупреждения о дорожном движении и предотвращения столкновений ( TCAS , произносится / t iː k æ s / ; TEE-kas ), представляет собой систему предотвращения столкновений самолетов, предназначенную для уменьшения количества столкновений в воздухе (MAC) между самолетами . Он контролирует воздушное пространство вокруг самолета на наличие других самолетов, оснащенных соответствующим активным транспондером , независимо от управления воздушным движением , и предупреждает пилотов о присутствии других самолетов, оборудованных транспондерами, которые могут представлять угрозу MAC. Это тип бортовой системы предотвращения столкновений, обязала которую Международная организация гражданской авиации устанавливать на все самолеты с максимальной взлетной массой (MTOM) более 5700 кг (12 600 фунтов) или разрешенные для перевозки более 19 пассажиров. CFR 14 , глава I, часть 135 требует, чтобы TCAS I был установлен для самолетов с 10-30 пассажирами и TCAS II для самолетов с более чем 30 пассажирами. ACAS/TCAS основан на вторичного обзорного радара (SSR) сигналах транспондера , но работает независимо от наземного оборудования, предоставляя пилоту рекомендации о потенциально конфликтующих воздушных судах.

В современных самолетах со стеклянной кабиной дисплей TCAS может быть интегрирован в навигационный дисплей (ND) или электронный индикатор горизонтальной ситуации (EHSI).

В старых самолетах со стеклянной кабиной и самолетах с механическими приборами встроенный дисплей TCAS, включающий индикатор мгновенной вертикальной скорости (IVSI), может заменить механический IVSI, который показывает только скорость, с которой самолет снижается или набирает высоту.
Импульс для системы и истории
[ редактировать ]Исследования систем предотвращения столкновений продолжаются, по крайней мере, с 1950-х годов, а авиационная отрасль работает с Американской ассоциацией воздушного транспорта (ATA) с 1955 года над созданием системы предотвращения столкновений. ИКАО и авиационные власти, такие как Федеральное управление гражданской авиации (ФАУ), были вынуждены принять меры после столкновения в воздухе Гранд-Каньона в 1956 году . [ 1 ]
Хотя бортовые транспондеры ATCRBS были доступны, только в середине 1970-х годов исследования были сосредоточены на использовании их сигналов в качестве совместного элемента системы предотвращения столкновений. Этот технический подход позволил обеспечить независимую возможность предотвращения столкновений в кабине экипажа, отдельно от наземной системы. В 1981 году ФАУ решило внедрить систему оповещения о дорожном движении и предотвращения столкновений (TCAS), которая была разработана на основе усилий отрасли и агентств в области систем предотвращения столкновений на основе маяков и методов связи «воздух-воздух» с дискретными адресами, в которых использовались Форматы сообщений бортового транспондера режима S. [ 2 ]
Спустя некоторое время прототипы TCAS II были установлены на два авиакомпании Piedmont Airlines самолета Boeing 727 и выполняли регулярные регулярные рейсы. Хотя дисплеи были расположены за пределами поля зрения летного экипажа и их видели только обученные наблюдатели, эти испытания предоставили ценную информацию о частоте и обстоятельствах предупреждений, а также их возможности взаимодействия с системой УВД . В ходе последующей фазы II программы более поздняя версия TCAS II была установлена на одном Боинге 727 Piedmont Airlines, и система была сертифицирована в апреле 1986 года, а затем одобрена для эксплуатационной оценки в начале 1987 года. Поскольку оборудование не было разработано Согласно полным стандартам, система работала только в визуальных метеорологических условиях (VMC). Хотя системой управлял летный экипаж, оценка проводилась в первую очередь с целью сбора данных и их сопоставления с наблюдениями летного экипажа и наблюдателей и реагированием на них. [ 2 ]
Более поздние версии TCAS II, произведенные Bendix / King Air Transport Avionics Division, были установлены и одобрены на самолетах United Airlines в начале 1988 года. Подобные устройства, произведенные Honeywell, были установлены и одобрены на самолетах Northwest Airlines в конце 1988 года. В рамках этой ограниченной программы установки эксплуатировалась TCAS II. единиц, одобренных для эксплуатации в качестве штатной системы как для визуальной, так и для приборной метеорологической обстановки (IMC) на трех различных типах самолетов. Программы оперативной оценки продолжались до 1988 года для подтверждения эксплуатационной пригодности систем. [ 2 ]
Инциденты
[ редактировать ]Внедрение TCAS добавило барьер безопасности, помогающий предотвратить столкновения в воздухе . Однако дальнейшие исследования, доработки, обучение и нормативные меры по-прежнему требовались, поскольку ограничения и неправильное использование системы по-прежнему приводили к другим инцидентам и несчастным случаям со смертельным исходом, в том числе:
- 1996 г., авиационное столкновение Чархи Дадри над Нью-Дели ;
- 1999 год. В Ламбурне едва не произошло столкновение с участием Боинга 737-300 и Gulfstream IV . Воздушное пространство над Ламборном является зоной ожидания Хитроу . Событие примечательно тем, что оба самолета вошли в зону с разных направлений, что привело к неминуемому лобовому столкновению (положение на час дня). Сообщение о дорожном движении (желтый знак) почти сразу же превратилось в предупреждение о разрешении дорожного движения (красный знак) с прогнозируемым временем столкновения менее 25 секунд. [ 3 ]
- Инцидент в воздухе Japan Airlines, 2001 г .; где капитан рейса 907 Japan Airlines ( Боинг 747-400 ), 40-летний Макото Ватанабэ ( 渡辺 誠 , Ватанабэ Макото ), решил снизиться по приказу авиадиспетчера, когда TCAS приказал летному экипажу набрать высоту, едва не столкнулся с снижающимся рейсом 958 DC-10 компании JAL, следовавшим из Пусана в токийский аэропорт Нарита .
- Столкновение в воздухе в Юберлингене в 2002 году между Боингом 757 и Ту-154 , когда пилоты Туполева отказались следовать рекомендациям по разрешению TCAS (RA), вместо этого следуя указаниям авиадиспетчера, в то время как пилоты Боинга следовали своим TCAS. -RA, без инструкций УВД.
- Столкновение рейса 1907 Gol Transportes Aéreos ( Боинг 737 ) и Embraer Legacy 600 в 2006 году ; Транспондер Embraer был случайно отключен, что отключило его собственную TCAS и сделало самолет невидимым для TCAS на борту рейса 1907.
- Почти столкновение во Фрибурге в 2011 году с участием самолетов Germanwings Airbus A319, рейс 2529, и Hahn-Air-Lines Raytheon Premier I, рейс 201. Служба управления воздушным движением в Женеве позволила рейсу 2529 опуститься до эшелона полета 250 (25 000 футов [7620 м]), но вошла в эшелон полета. 280 (28 000 футов [8 534 м]), как обычно, для передачи в управление дорожного движения в Цюрихе. Диспетчерская служба в Цюрихе разрешила рейсу 201 подняться на эшелон 270 (27 000 футов [8 230 м]). Это вызвало предупреждение о разрешении (RA) для Airbus затонуть и для Raytheon взобраться наверх, за которым последовали оба самолета. Девять секунд спустя Женева приказала «Рейтеону» опуститься до эшелона полета 260 (26 000 футов [7925 м]), чему они затем последовали. Это привело к ситуации, когда оба самолета пролетели на минимальном расстоянии 100 футов (30 м). Вскоре после этого Raytheon оказался ниже, чем Airbus, и TCAS выдала RA на разворот, чтобы Airbus поднялся на высоту, а Raytheon затонул. [ 4 ]
Обзор
[ редактировать ]Описание системы
[ редактировать ]TCAS предполагает связь между всеми самолетами, оснащенными соответствующим транспондером (при условии, что транспондер включен и правильно настроен). Каждый самолет, оснащенный TCAS, опрашивает все другие самолеты в определенном диапазоне об их положении (по радиочастоте 1030 , ) МГц а все остальные самолеты отвечают на другие запросы (посредством 1090 МГц). Этот цикл запроса и ответа может происходить несколько раз в секунду. [ 5 ] [ 1 ]
Система TCAS строит трехмерную карту самолетов в воздушном пространстве, включая их дальность (полученную на основе времени полета туда и обратно на запрос и ответ), высоту (согласно сообщению опрашиваемого самолета) и пеленг (направленной антенной на основе ответа). . Затем, экстраполируя текущую дальность полета и разницу высот на ожидаемые будущие значения, он определяет, существует ли потенциальная угроза столкновения.
TCAS и ее варианты могут взаимодействовать только с самолетами, имеющими правильно работающий режима C или режима S. транспондер Каждому воздушному судну, имеющему транспондер режима S, присваивается уникальный 24-битный идентификатор.
Следующим шагом, помимо выявления потенциальных столкновений, является автоматическое согласование маневра взаимного уклонения (в настоящее время маневры ограничиваются изменением высоты и изменением скорости набора высоты/снижения) между двумя (или более) конфликтующими самолетами. Эти маневры уклонения передаются летному экипажу с помощью дисплея в кабине и синтезированных голосовых инструкций. [ 5 ] [ 1 ]
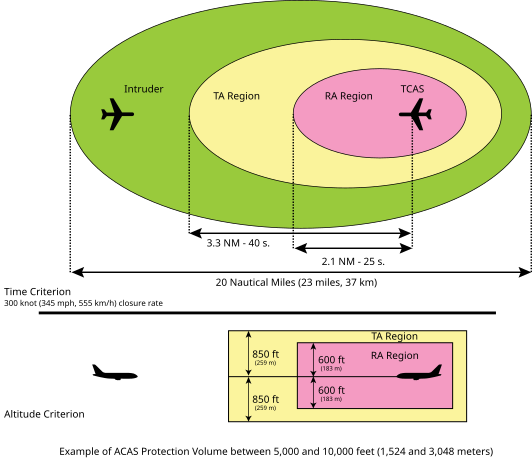
Каждый самолет, оснащенный TCAS, окружает защищенный объем воздушного пространства. Размер защищаемого объема зависит от высоты, скорости и курса самолета, участвующего в столкновении. На рисунке ниже показан пример типичного защитного объема TCAS.
Компоненты системы
[ редактировать ]Установка TCAS состоит из следующих компонентов: [ 5 ] [ 1 ]
- Компьютерный блок TCAS
- Осуществляет наблюдение за воздушным пространством, отслеживание нарушителей, отслеживание высоты собственного самолета, обнаружение угроз, определение и выбор маневра рекомендации по разрешению (RA), а также выработку рекомендаций. Процессор TCAS использует барометрическую высоту, высоту по радару и дискретные входные данные о состоянии самолета от своего собственного самолета для управления логическими параметрами предотвращения столкновений, которые определяют объем защиты вокруг самолета TCAS.
- Антенны
- Антенны, используемые TCAS II, включают направленную антенну, которая устанавливается на верхней части самолета, а также всенаправленную или направленную антенну, установленную на нижней части самолета. В большинстве установок используется дополнительная направленная антенна, расположенная в нижней части самолета. Помимо двух антенн TCAS, для транспондера режима S также требуются две антенны. Одна антенна установлена на верхней части самолета, а другая — на нижней. Эти антенны позволяют транспондеру режима S принимать запросы на частоте 1030 МГц и отвечать на полученные запросы на частоте 1090 МГц.
- Презентация кабины
- Интерфейс TCAS с пилотами обеспечивается двумя дисплеями: отображением трафика и отображением RA. Эти два дисплея могут быть реализованы разными способами, включая дисплеи, объединяющие оба дисплея в единый физический блок. Независимо от реализации отображаемая информация идентична. Стандарты отображения дорожного движения и отображения RA определены в DO-185A. [ 6 ]
Операция
[ редактировать ]В следующем разделе описывается работа TCAS на основе TCAS II, поскольку именно эта версия была принята в качестве международного стандарта (ACAS II) ИКАО и авиационными властями во всем мире. [ 5 ] [ 1 ]
Режимы работы
[ редактировать ]В настоящее время TCAS II может работать в следующих режимах: [ 5 ] [ 1 ]
- Поддерживать
- Питание подается на процессор TCAS и транспондер режима S, но TCAS не выдает никаких запросов, и транспондер будет отвечать только на дискретные запросы.
- Транспондер
- Транспондер режима S полностью работоспособен и будет отвечать на все соответствующие запросы наземной системы и TCAS. TCAS остается в режиме ожидания.
- Только рекомендации по дорожному движению
- Транспондер режима S полностью работоспособен. TCAS будет работать нормально, выдавать соответствующие запросы и выполнять все функции отслеживания. Однако TCAS будет выдавать только рекомендации по трафику (TA), а рекомендации по разрешению (RA) будут запрещены.
- Автоматически (рекомендации по трафику/разрешению)
- Транспондер режима S полностью работоспособен. TCAS будет работать нормально, выдавать соответствующие запросы и выполнять все функции отслеживания. TCAS будет выдавать рекомендации по дорожному движению (TA) и рекомендации по разрешению проблем (RA), когда это необходимо.
TCAS работает скоординировано, поэтому при выдаче RA конфликтующему самолету необходимое действие (т.е. Набор высоты ) должно быть немедленно выполнено одним из самолетов, а другой получает аналогичную RA в противоположном направлении. направление (т.е. Спуск. Спуск. ).
Оповещения
[ редактировать ]
TCAS II выдает следующие типы звуковых оповещений:
- Консультации по дорожному движению (TA)
- Рекомендации по разрешению (RA)
- Очищение от конфликта
При выдаче ТА пилотам дается указание начать визуальный поиск трафика, вызвавшего ТА. Если движение воспринимается визуально, пилотам дается указание сохранять визуальное отделение от потока движения. В программах обучения также указано, что нельзя совершать горизонтальные маневры исключительно на основе информации, отображаемой на дисплее дорожного движения. Допускаются небольшие корректировки вертикальной скорости при наборе высоты или снижении, а также небольшие корректировки воздушной скорости при соблюдении разрешения УВД. [ 7 ]
Ожидается, что при выдаче RA пилоты немедленно отреагируют на нее, если только это не поставит под угрозу безопасное выполнение полета. Это означает, что воздушному судну иногда придется маневрировать вопреки указаниям УВД или игнорировать указания УВД. В этих случаях диспетчер больше не несет ответственности за разделение воздушного судна, участвовавшего в RA, до прекращения конфликта.
С другой стороны, УВД потенциально может повлиять на реакцию пилота на RA. Если конфликтующее указание УВД совпадает с RA, пилот может предположить, что УВД полностью осведомлено о ситуации и обеспечивает лучшее разрешение. Но на самом деле УВД не знает о RA до тех пор, пока пилот не сообщит о RA. После того как пилот сообщил о RA, диспетчер УВД обязан не пытаться изменить траекторию полета воздушного судна, участвовавшего в столкновении. Следовательно, ожидается, что пилот будет «следовать за RA», но на практике это не всегда происходит.
Некоторые страны внедрили «нисходящую линию связи RA», которая предоставляет авиадиспетчерам информацию о RA, размещенную в кабине экипажа. В настоящее время не существует положений ИКАО, касающихся использования линии связи RA диспетчерами воздушного движения.
Во время обучения пилотов особое внимание уделяется следующим моментам:
- Не маневрируйте в направлении, противоположном указанному RA, поскольку это может привести к столкновению.
- Проинформируйте диспетчера о RA, как только это позволит загруженность летного экипажа, после ответа на RA. Нет необходимости направлять это уведомление до начала ответа RA.
- Будьте внимательны к удалению RA или ослаблению RA, чтобы свести к минимуму отклонения от разрешенной высоты.
- Если возможно, выполняйте разрешение диспетчера, например, развернитесь для перехвата воздушного пути или курсового маяка, одновременно отвечая на RA.
- После завершения события RA немедленно вернитесь к предыдущему разрешению или указанию УВД или выполняйте пересмотренное разрешение или указание УВД. [ 7 ]
RA происходит в среднем каждые 1000 часов полета на ближне/ среднемагистральных самолетах и каждые 3000 часов на дальнемагистральных самолетах. В своем по БСПС руководстве от декабря 2017 года Евроконтроль обнаружил, что примерно в 25% случаев пилоты следуют RA неточно. Airbus предлагает опцию автопилота / директора полета TCAS для автоматического маневрирования уклонения. [ 8 ]
Типы трафика и рекомендации по разрешению проблем
[ редактировать ]| Тип | Текст | Значение | Требуемое действие [ 5 ] [ 1 ] [ 9 ] |
|---|---|---|---|
| ОБЛИЦОВКА | Трафик; трафик. | Нарушитель вблизи как по горизонтали, так и по вертикали. | Попытайтесь установить визуальный контакт и будьте готовы маневрировать в случае возникновения RA. |
| ДА | Взбираться; взбираться. | Злоумышленник пройдет ниже | Начните подъем со скоростью 1500–2000 футов/мин (460–610 м/мин). |
| ДА | Спускайтесь. Спускайтесь. | Злоумышленник пройдет выше. | Начните снижение со скоростью 1500–2000 футов/мин (460–610 м/мин). |
| ДА | Увеличить набор высоты. | Нарушитель пройдет чуть ниже | Поднимайтесь со скоростью 2500–3000 футов/мин (760–910 м/мин). |
| ДА | Увеличение спуска. | Нарушитель пройдет чуть выше. | Спускайтесь со скоростью 2500–3000 футов/мин (760–910 м/мин). |
| ДА | Уменьшите набор высоты. | Вероятно, нарушитель находится значительно ниже. | Поднимайтесь медленнее. |
| ДА | Уменьшить спуск. | Злоумышленник, вероятно, находится значительно выше. | Спускайтесь медленнее. |
| ДА | Взбираться; залезай сейчас. | Злоумышленник, проходивший выше, теперь пройдет ниже. | Переход от спуска к подъему. |
| ДА | Спускайтесь; спускайся сейчас. | Нарушитель, проходивший ниже, теперь пройдет выше. | Переход от подъема к спуску. |
| ДА | Поддерживать вертикальную скорость; поддерживать. | Нарушителя удастся избежать, если будет сохраняться вертикальная скорость. | Поддерживать текущую вертикальную скорость. |
| ДА | Выровняйтесь, выровняйтесь. | Нарушитель значительно удален или ослабление первоначального RA. | Начните выравниваться. |
| ДА | Следите за вертикальной скоростью. | Нарушитель впереди в горизонтальном полете, выше или ниже. | Оставайтесь в горизонтальном полете. |
| ДА | Пересечение. | Прохождение уровня злоумышленника. Обычно добавляется к любому другому РА. | Действуйте согласно соответствующему RA. |
| СС | Очистка от конфликта. | Злоумышленник больше не представляет угрозы. | Незамедлительно вернитесь к предыдущему разрешению УВД. |
Взаимодействие пилота и экипажа во время события TCAS
[ редактировать ]| экипаж | Контроллер | |||||
|---|---|---|---|---|---|---|
| Консультации по дорожному движению (TA) | ||||||
| Не должны маневрировать своим самолетом только в ответ на рекомендации по дорожному движению (TA). | Остается ответственным за разделение УВД. | |||||
| Следует подготовиться к соответствующим действиям в случае возникновения RA; но, насколько это практически возможно, пилоты не должны запрашивать информацию о дорожном движении | По запросу экипажа предоставляет информацию о воздушном движении. | |||||
| Рекомендации по разрешению (RA) | ||||||
| Должен немедленно отреагировать и совершить маневр, как указано, за исключением случаев, когда это поставит под угрозу безопасность воздушного судна. | Не должен пытаться изменить траекторию полета воздушного судна, реагирующего на RA. | |||||
| Должен следовать RA, даже если существует конфликт между RA и указанием диспетчера воздушного движения (УВД) на маневр. | Не должен выдавать никаких разрешений или инструкций задействованному воздушному судну до тех пор, пока пилот не сообщит о возвращении к условиям выданного разрешения или инструкции УВД. | |||||
| Никогда не должен маневрировать в направлении, противоположном RA, или поддерживать вертикальную скорость в направлении, противоположном RA. | Подтвердить сообщение, используя фразу «РОДЖЕР». | |||||
При отклонении от указаний или разрешений авиадиспетчерской службы в ответ на любое RA:
|
По запросу экипажа предоставляет информацию о воздушном движении. | |||||
| Должен незамедлительно соблюдать любые последующие RA, выданные TCAS. | Перестает нести ответственность за обеспечение эшелонирования между этим самолетом и любым другим самолетом, затронутым прямым следствием маневра, вызванного RA, до тех пор, пока пилот сообщил о TCAS RA. | |||||
| Ограничивает изменения траектории полета до минимальной степени, необходимой для соблюдения рекомендаций по резолюции. | ||||||
| Отсутствие конфликта (CC) | ||||||
| Должен незамедлительно вернуться к условиям инструкции или разрешения УВД после разрешения конфликта. | Возвращает к ответственности за обеспечение эшелонирования всех пострадавших воздушных судов, когда он признает:
| |||||
| Должен уведомить УВД после начала возврата или возобновления текущего разрешения. | ||||||
Аспекты безопасности
[ редактировать ]По оценкам исследований безопасности TCAS, эта система повышает безопасность в воздушном пространстве в 3–5 раз. [ 10 ]
Однако хорошо известно, что часть остающегося риска заключается в том, что TCAS может вызвать столкновения в воздухе: «В частности, это зависит от точности сообщаемой высоты самолета-угрозы и от ожидания того, что самолет-угроза не совершит резкий маневр. это противоречит рекомендациям по разрешению TCAS (RA). Исследование безопасности также показывает, что TCAS II может вызвать некоторые критические столкновения в воздухе...» (см. стр. 7 Введения в TCAS II версии 7 и 7.1 (PDF) во внешних ссылках ниже). . [ 5 ] [ 1 ]
Одной из потенциальных проблем с TCAS II является возможность того, что рекомендуемый маневр уклонения может заставить летный экипаж снизиться к местности ниже безопасной высоты. Недавние требования по учету близости земли снижают этот риск. Предупреждения о приближении к земле имеют приоритет в кабине над предупреждениями TCAS.
Некоторые пилоты не знали, как действовать, когда их самолету требовалось набрать высоту во время полета на максимальной высоте. Принятая процедура состоит в том, чтобы как можно лучше следовать восхождению по восхождению, временно меняя скорость на высоту . Набор высоты RA должен быстро закончиться. В случае предупреждения о сваливании оно будет иметь приоритет.
Оба случая были рассмотрены в версии 7.0 TCAS II и в настоящее время обрабатываются корректирующей RA вместе с визуальной индикацией зеленой дуги на дисплее IVSI, указывающей безопасную дальность набора высоты или скорости снижения. Однако было обнаружено, что в некоторых случаях эти признаки могут привести к опасной ситуации для задействованного самолета. Например, если событие TCAS происходит, когда два самолета снижаются один над другим для посадки, самолет на меньшей высоте сначала получит RA «Спускайтесь, снижайтесь» , а при достижении предельно малой высоты это изменится на RA «Выровняйте, выровняйте» вместе с зеленой дугой, указывающей пилоту выровнять самолет. Это может привести к тому, что самолет окажется на пути нарушителя, спускающегося на посадку. Для исправления этой проблемы было выпущено предложение об изменении. [ 11 ]
Эту статью необходимо обновить . ( апрель 2021 г. ) |
Связь с консультативной системой дорожного движения (TAS)
[ редактировать ]Технология TCAS оказалась слишком дорогой для самолетов малого бизнеса и авиации общего назначения. Производители и власти признали необходимость альтернативы TCAS; это привело к разработке системы консультирования по дорожному движению. TAS на самом деле является упрощенной версией TCAS I. Структура системы, компоненты, работа, отображение трафика и логика TA идентичны, но минимальные стандарты эксплуатационных характеристик (MOPS) TAS допускают некоторое упрощение по сравнению с TCAS I: [ 12 ] [ 13 ]
- Определено оборудование классов A и B, где класс A идентичен TCAS I, но устройства класса B работают без отображения трафика (последние выдают только звуковые TA, сопровождаемые некоторым визуальным представлением TA).
- Дисплей ТАС может быть монохромным.
- Имеются очень незначительные различия в значениях эксплуатационных допусков.
- Устройства TAS могут предоставлять только два уровня рекомендаций: «Другой трафик» и «Информация о трафике» (TA). Отображение ближайшего трафика и непосредственных рекомендаций (PA) не являются обязательными, тем не менее, большинство устройств TAS обеспечивают отслеживание ближайшего трафика и используют стандартную символику TCAS I.
- Чтобы гарантировать, что все помехи от оборудования TCAS I сохраняются на низком уровне, оборудование TCAS I постоянно подсчитывает количество самолетов TCAS поблизости и снижает их частоту запросов или мощность или и то, и другое, чтобы соответствовать эксплуатационным ограничениям. Это также справедливо для оборудования TAS, но производитель может выбрать эксплуатацию TAS как системы с низким энергопотреблением с фиксированным пределом мощности 42 Вт/сек, и в этом случае требование по ограничению помех устраняется.
Следующие документы содержат все различия между TCAS I и TAS:
- минимальные стандарты эксплуатационных характеристик (MOPS) TCAS I описаны в RTCA-DO-197A, [ 12 ]
- а изменения к этому документу, применимые к системе управления дорожным движением (TAS), опубликованы в приложении 1 TSO-C147a (или ETSO-C147a). [ 13 ]
Несмотря на все это, большинство производителей не используют вышеперечисленные возможности для создания упрощенных устройств. В результате рыночных сил многие системы TAS работают так же, как TCAS I (с ограничением помех, использованием символики TCAS I и т. д.), а некоторые даже имеют лучшие характеристики наблюдения (по дальности и отслеживаемые самолеты) и характеристики, чем TCAS I.
Связь с автоматическим зависимым наблюдением – вещание (ADS – B)
[ редактировать ]Автоматическое зависимое наблюдение – широковещательные сообщения (ADS–B) передаются с самолетов, оснащенных подходящими транспондерами, и содержат такую информацию, как личность, местоположение и скорость. Сигналы транслируются на радиочастоте 1090 МГц. Сообщения ADS-B также передаются приемопередатчиком универсального доступа (UAT) в диапазоне 978 МГц. [ 14 ]
Оборудование TCAS, способное обрабатывать сообщения ADS – B, может использовать эту информацию для повышения производительности TCAS, используя методы, известные как «гибридное наблюдение». В настоящее время гибридное наблюдение использует прием сообщений ADS – B от самолета, чтобы снизить скорость, с которой оборудование TCAS опрашивает этот самолет. Такое сокращение количества запросов снижает использование радиоканала 1030/1090 МГц и со временем продлит эксплуатационный срок службы технологии TCAS. Сообщения ADS-B также позволят использовать недорогую (для самолетов) технологию обеспечения трафика в кабине малых самолетов в реальном времени. [ 15 ] В настоящее время каналы восходящего трафика на базе UAT предоставляются на Аляске и в регионах восточного побережья США.
Гибридное наблюдение не использует информацию о полете самолета ADS – B в алгоритмах обнаружения конфликтов TCAS; ADS-B используется только для идентификации самолетов, которые можно безопасно опрашивать с меньшей скоростью.
В будущем возможности прогнозирования могут быть улучшены за счет использования информации вектора состояния, присутствующей в сообщениях ADS-B. Кроме того, поскольку сообщения ADS-B могут быть получены на большем расстоянии, чем обычно работает TCAS, самолеты могут быть обнаружены раньше с помощью алгоритмов слежения TCAS.
Идентификационная информация, содержащаяся в сообщениях ADS-B, может использоваться для обозначения других самолетов на дисплее кабины (если он имеется), рисуя картину, аналогичную той, которую увидит авиадиспетчер, и улучшая ситуационную осведомленность. [ 16 ] [ 17 ]
Версии
[ редактировать ]ТКАС I
[ редактировать ]TCAS I - более дешевая, но менее эффективная система, чем современная система TCAS II, представленная для использования в авиации общего назначения после того, как Федеральное управление гражданской авиации разрешило использовать TCAS II в транспортных самолетах. Системы TCAS I способны отслеживать дорожную ситуацию вокруг самолета (в радиусе около 40 миль) и предоставлять информацию о приблизительном пеленге и высоте других самолетов. Он также может генерировать предупреждения о столкновениях в форме «Информации о дорожном движении» (TA). ТА предупреждает пилота о том, что поблизости находится другой самолет, объявляя «Движение, движение» , но не предлагает никаких мер по устранению проблемы; Пилот должен решить, что делать, обычно с помощью службы управления воздушным движением. Когда угроза миновала, система объявляет «Устранение конфликта» . [ 18 ]
ТКАС II
[ редактировать ]TCAS II — первая система, которая была представлена в 1989 году и представляет собой современное поколение приборного предупреждения TCAS, используемое в большинстве самолетов коммерческой авиации (см. таблицу ниже). Боинг 737 компании US Airways был первым самолетом, сертифицированным с системой AlliedBendix (теперь Honeywell) TCAS II. Он предлагает все преимущества TCAS I, но также предлагает пилоту прямые голосовые инструкции по предотвращению опасности, известные как «Рекомендации по разрешению» (RA). Рекомендательное действие может быть «корректирующим», предлагая пилоту изменить вертикальную скорость, объявив: «Спускайтесь, снижайтесь» , «Набирайте высоту, поднимайтесь» или «Выровняйтесь, выровняйтесь» (что означает снижение вертикальной скорости). Напротив, может быть выдана «превентивная» RA, которая просто предупреждает пилотов о том, чтобы они не отклонялись от текущей вертикальной скорости, объявляя: «Контролировать вертикальную скорость» или «Поддерживать вертикальную скорость, поддерживать» . Системы TCAS II координируют свои рекомендации по разрешению проблем перед выдачей команд пилотам, так что, если одному самолету дано указание снизиться, другому обычно будет приказано набрать высоту, что максимально увеличивает расстояние между двумя самолетами. [ 1 ]
По состоянию на 2006 год это единственная реализация, соответствующая стандартам ACAS II, установленным ИКАО. [ 19 ] была версия 7.0 TCAS II, произведенная тремя производителями авионики: Rockwell Collins , Honeywell и ACSS (Aviation Communication & Surveillance Systems; L3 Technologies и Thales Avionics совместное предприятие ).
После столкновения в воздухе в Юберлингене в 2002 г. (1 июля 2002 г.) были проведены исследования по улучшению возможностей TCAS II. После обширного вклада и давления Евроконтроля RTCA (Специальный комитет SC-147) совместно разработал пересмотренный документ «Минимальные стандарты эксплуатационных характеристик (MOPS) TCAS II». [ 20 ] ) и ЕВРОКАЕ. В результате к 2008 году были выпущены стандарты версии 7.1 TCAS II. [ 21 ] и опубликован как RTCA DO-185B [ 6 ] (июнь 2008 г.) и EUROCAE ED-143 (сентябрь 2008 г.).
TCAS II Версия 7.1 [ 1 ] сможет отдавать изменение RA в скоординированных столкновениях, в случае, если один из самолетов не следует первоначальным инструкциям RA (Предложение по изменению CP112E). [ 22 ] Другими изменениями в этой версии являются замена двусмысленного RA «Отрегулировать вертикальную скорость, отрегулировать» на RA «Выравнивание, отрегулировать» для предотвращения неправильной реакции пилотов (Предложение по изменению CP115).; [ 23 ] а также улучшенная обработка корректирующих/предупреждающих сигналов и удаление зеленой дуги, когда положительная RA ослабевает исключительно из-за условий чрезвычайно низкой или большой высоты (1000 футов над землей или ниже или вблизи верхнего потолка самолета) для предотвращения неправильных и, возможно, опасных руководство пилоту (Изменить предложение CP116). [ 11 ] [ 24 ]
Исследования, проведенные для Евроконтроля с использованием недавно зарегистрированных оперативных данных, показывают, что в настоящее время [ когда? ] вероятность столкновения в воздухе за каждый час полета в европейском воздушном пространстве составляет 2,7 х 10. −8 что соответствует одному разу в 3 года. При внедрении TCAS II версии 7.1 эта вероятность будет уменьшена в 4 раза. [ 24 ]
Хотя ACAS III упоминается в качестве будущей системы в Приложении 10 ИКАО, маловероятно, что ACAS III будет реализована из-за трудностей, с которыми существующие системы наблюдения сталкиваются при горизонтальном слежении. В настоящее время проводятся исследования по разработке будущей системы предотвращения столкновений (под рабочим названием ACAS X). [ 25 ]
ТКАС III
[ редактировать ]Первоначально обозначенный как TCAS II Enhanced, TCAS III задумывался как расширение концепции TCAS II, включив в него возможность выдачи рекомендаций по горизонтальному разрешению. TCAS III была «следующим поколением» технологии предотвращения столкновений, которая была разработана авиационными компаниями, такими как Honeywell . TCAS III включал технические обновления системы TCAS II и имел возможность предлагать пилотам рекомендации по дорожному движению и разрешать конфликтные ситуации при движении, используя указания пилотам по горизонтальному и вертикальному маневрированию. Например, в ситуации лобового столкновения одному самолету может быть дано указание «повернуть направо, набрать высоту», а другому — «повернуть направо, снизиться». Это позволит еще больше увеличить общее расстояние между самолетами как в горизонтальном, так и в вертикальном аспектах. Горизонтальные директивы были бы полезны в конфликте между двумя самолетами, находящимися близко к земле, где может быть мало места для вертикального маневрирования. [ 26 ]
TCAS III попыталась использовать направленную антенну TCAS для определения пеленга на другой самолет и, таким образом, иметь возможность выполнить горизонтальный маневр (например, повернуть налево или направо). Однако представители отрасли сочли это неосуществимым из-за ограничений точности направленных антенн TCAS. Направленные антенны были признаны недостаточно точными для определения точного положения в горизонтальной плоскости и, следовательно, точного горизонтального разрешения. К 1995 году годы испытаний и анализа показали, что эта концепция неработоспособна с использованием доступных технологий наблюдения (из-за неадекватности информации о горизонтальном положении) и что горизонтальные RA вряд ли будут задействованы в большинстве геометрий столкновения. Таким образом, все работы над TCAS III были приостановлены, и планов по ее внедрению нет. Позднее концепция была развита и заменена TCAS IV. [ 27 ] [ 28 ]
ТКАС IV
[ редактировать ]TCAS IV использует дополнительную информацию, закодированную целевым самолетом в ответе транспондера режима S (т. е. цель кодирует свое собственное положение в сигнале транспондера), для формирования горизонтального разрешения для RA. какой-то надежный источник местоположения (например, инерциальная навигационная система или GPS Кроме того, для его кодирования на целевом самолете необходим ).
TCAS IV заменил концепцию TCAS III к середине 1990-х годов. Одним из результатов опыта TCAS III было то, что направленная антенна, используемая процессором TCAS для определения пеленга полученного ответа транспондера , была недостаточно точной, чтобы генерировать точное горизонтальное положение и, следовательно, безопасное горизонтальное разрешение. TCAS IV использовала дополнительную информацию о местоположении, закодированную по каналу передачи данных «воздух-воздух», для генерации информации о пеленге, так что точность направленной антенны не была решающим фактором.
Разработка TCAS IV продолжалась в течение нескольких лет, но появление новых тенденций в области каналов передачи данных, таких как автоматическое зависимое наблюдение – широковещательная передача ( ADS-B ), указало на необходимость переоценки того, является ли система каналов передачи данных предназначенной для предотвращения столкновений, такая как TCAS IV следует включить в более общую систему передачи данных «воздух-воздух» для дополнительных приложений. В результате этих проблем от концепции TCAS IV отказались, когда ADS-B . началась разработка [ 28 ] [ 29 ]
Текущая реализация
[ редактировать ]Хотя система время от времени дает ложные сигналы тревоги, пилотам теперь даны строгие инструкции рассматривать все сообщения TCAS как подлинные сигналы тревоги, требующие немедленного и высокоприоритетного реагирования. Только оповещения и предупреждения об обнаружении сдвига ветра и GPWS имеют более высокий приоритет, чем TCAS. Правила FAA инструкциями , EASA и властей большинства других стран гласят, что в случае конфликта между инструкциями TCAS RA и управления воздушным движением (УВД) TCAS RA всегда имеет приоритет. Это главным образом связано с тем, что TCAS-RA по своей сути обладает более актуальной и полной картиной ситуации, чем авиадиспетчеры, у которых обновления радара / транспондера обычно происходят гораздо медленнее, чем запросы TCAS. [ 5 ] [ 1 ] Если один самолет следует TCAS RA, а другой следует противоречивым инструкциям УВД, может произойти столкновение, такое как катастрофа в Юберлингене 1 июля 2002 года . Во время этого столкновения в воздухе оба самолета были оснащены системами TCAS II версии 7.0, которые работали правильно, но один подчинялся рекомендациям TCAS, а другой игнорировал TCAS и подчинялся диспетчеру; оба самолета столкнулись со смертельным исходом. [ 30 ]
Эту аварию можно было бы предотвратить, если бы TCAS смогла отменить исходную RA для одного из самолетов, когда она обнаружила, что экипаж другого не следует своей исходной RA TCAS, а вместо этого противоречит инструкциям УВД. Это одна из функций, которая позже будет реализована в версии 7.1 TCAS II. [ 21 ] [ 31 ] [ 32 ]
Внедрение версии 7.1 TCAS II первоначально планировалось начать в период с 2009 по 2011 год путем модернизации и дооснащения всех самолетов, оснащенных TCAS II, с целью, чтобы к 2014 году версия 7.0 была полностью снята с производства и заменена версией 7.1. ФАУ . и EASA уже опубликовали Приказ о техническом стандарте TCAS II версии 7.1 (TSO-C119c) [ 33 ] и ETSO-C119c, [ 34 ] соответственно) действует с 2009 г., на базе RTCA DO-185B [ 6 ] и стандарты EUROCAE ED-143. 25 сентября 2009 г. ФАУ выпустило консультативный циркуляр AC 20-151A. [ 35 ] предоставление рекомендаций по получению одобрения летной годности для систем TCAS II, включая новую версию 7.1. 5 октября 2009 г. Ассоциация европейских авиакомпаний (AEA) опубликовала позиционный документ. [ 36 ] показывая необходимость обязательного использования TCAS II версии 7.1 на всех самолетах в приоритетном порядке. 25 марта 2010 года Европейское агентство по авиационной безопасности (EASA) опубликовало Уведомление о предлагаемой поправке (NPA) № 2010-03, касающейся внедрения программного обеспечения ACAS II версии 7.1. [ 37 ] 14 сентября 2010 года EASA опубликовало Документ-ответ на комментарии (CRD) к вышеупомянутому NPA. [ 38 ] Отдельно было сделано предложение внести поправку в стандарт ИКАО , требующую наличия TCAS II версии 7.1 для соответствия SARPS ACAS II.
ИКАО распространила поправку к официальному соглашению государств-членов, в которой рекомендуется принять изменение 7.1 TCAS II к 1 января 2014 года для передовой модификации и к 1 января 2017 года для модернизации. После отзывов и комментариев операторов авиакомпаний EASA предложило следующие даты для мандата TCAS II версии 7.1 в европейском воздушном пространстве: передовая установка (для новых самолетов) - 1 марта 2012 г., модернизация (для существующих самолетов) - 1 декабря 2015 г. Эти даты: предлагаемые даты зависят от дальнейших нормативных процессов и не являются окончательными до тех пор, пока не будет опубликовано Правило реализации. [ 24 ]
Среди производителей систем к февралю 2010 г. ACSS [ 39 ] сертифицированное изменение 7.1 для своих систем TCAS 2000 и Legacy TCAS II, [ 40 ] и в настоящее время предлагает своим клиентам обновление до Change 7.1. [ 41 ] К июню 2010 года компания Honeywell опубликовала официальный документ с предлагаемыми решениями для TCAS II версии 7.1. [ 42 ] Rockwell Collins в настоящее время объявляет, что их системы, совместимые с TCAS-94, TCAS-4000 и TSS-4100 TCAS II, имеют возможность обновления программного обеспечения до версии 7.1, когда она будет доступна. [ 43 ]
Текущие ограничения
[ редактировать ]Хотя преимущества безопасности текущих реализаций TCAS очевидны, весь технический и эксплуатационный потенциал TCAS не используется в полной мере из-за ограничений в текущих реализациях (большинство из которых необходимо будет устранить, чтобы в дальнейшем облегчить разработку и внедрение системы TCAS). Свободный полет ) и NextGen :
- Большинство проблем TCAS II, о которых сообщается в Систему отчетности по авиационной безопасности (ASRS), включают аномальную или ошибочную работу оборудования TCAS II, отвлечение внимания, вызванное TCAS, конфликты в воздухе, спровоцированные TCAS, и нестандартное использование TCAS. [ 44 ]
- Как и контроллер, TCAS II использует информацию режима C для определения вертикального эшелонирования другого трафика. Если режим C хотя бы временно предоставит ошибочную информацию о высоте, это может привести к ошибочной команде рекомендации по разрешению набора высоты или снижения. В отличие от диспетчера, TCAS II не может опрашивать летный экипаж, чтобы определить, связана ли проблема с неисправным оборудованием. [ 44 ]
- Пилоты часто ссылаются на то, что TCAS II мешает слуху и рабочей нагрузке нормальным обязанностям в кабине. [ 44 ]
- Во многих отчетах об инцидентах с TCAS, полученных в ASRS, утверждается, что реакция пилота на ошибочные команды TCAS спровоцировала конфликт, которого изначально не было. Рассмотрим следующее столкновение в воздухе (NMAC), когда TCAS II RA вполне могла быть вызвана высокой скоростью набора высоты авиаперевозчика (Y). [ 44 ]
- TCAS ограничена поддержкой только рекомендаций по вертикальному эшелонированию, однако более сложные сценарии дорожного конфликта можно более легко и эффективно устранить, также используя маневры бокового разрешения; это, в частности, относится к конфликтам при движении с ограниченным дорожным просветом или к сценариям конфликтов, которые аналогичным образом ограничены вертикальными ограничениями (например, в загруженном воздушном пространстве RVSM ).
- УВД может быть автоматически проинформировано о рекомендациях по разрешающей способности, выдаваемых TCAS, только когда воздушное судно находится в зоне действия режима S или сети мониторинга ADS-B . В других случаях диспетчеры могут не знать о рекомендациях по разрешению проблем, основанных на TCAS, или даже выдавать противоречивые инструкции (если только члены кабины экипажа не проинформируют УВД о выданной RA во время ситуации высокой рабочей нагрузки), что может стать источником путаницы для затронутых лиц. экипажей, одновременно увеличивая рабочую нагрузку пилотов. В мае 2009 года Люксембург, Венгрия и Чехия продемонстрировали диспетчерам RA по нисходящей линии связи.
- В приведенном выше контексте TCAS не имеет автоматизированных средств, позволяющих пилотам легко сообщать и подтверждать получение (обязательного) RA диспетчеру УВД (и намерение его соблюдать), так что голосовое радио в настоящее время является единственным вариантом сделать это, что, однако, дополнительно увеличивает рабочую нагрузку пилотов и УВД, а также перегрузку частот во время критических ситуаций.
- В том же контексте ситуационная осведомленность органов УВД зависит от точной информации о маневрировании воздушного судна, особенно во время сценариев конфликта, которые могут вызвать или способствовать новым конфликтам из-за отклонения от запланированного маршрута, поэтому автоматически визуализируются выданные рекомендации по разрешению проблем и пересчитывается дорожная ситуация в затронутой зоне. очевидно, поможет УВД обновлять и поддерживать ситуационную осведомленность даже во время незапланированных, специальных изменений маршрутов, вызванных конфликтами эшелонирования.
- Сегодняшние дисплеи TCAS не предоставляют информацию о рекомендациях по разрешению, выданных другим (конфликтующим) самолетам, в то время как рекомендации по разрешению, выданные другим самолетам, могут показаться нерелевантными для другого самолета, эта информация позволит и поможет экипажам оценить, действительно ли другие самолеты (конфликтующие самолеты) соответствуют требованиям. с RA путем сравнения фактической скорости изменения (высоты) с запрошенной скоростью изменения (которая может выполняться автоматически и соответственно визуализироваться с помощью современной авионики), тем самым предоставляя важную информацию в реальном времени для ситуационной осведомленности во время крайне критических ситуаций.
- Сегодня дисплеи TCAS часто в основном основаны на дальности, поэтому они показывают дорожную ситуацию только в пределах настраиваемого диапазона миль/футов, однако при определенных обстоятельствах представление «на основе времени» (т. е. в течение следующих xx минут) может быть более интуитивным. .
- Недостаточная осведомленность о местности/земле и препятствиях (например, подключение к TAWS , включая осведомленность о секторе MSA ), что может иметь решающее значение для создания осуществимых (неопасных в контексте просвета местности) и полезных рекомендаций по разрешению препятствий (т. е. предотвращения инструкций по экстремальному снижению, если близко к местности), чтобы гарантировать, что RA TCAS никогда не будут способствовать сценариям CFIT (контролируемый полет на землю).
- Летно-технические характеристики самолета в целом и текущие летно-технические возможности в частности (из-за активной конфигурации самолета) не принимаются во внимание во время переговоров и создания рекомендаций по разрешению проблем (как это происходит в случае различий между различными типами самолетов, например, турбовинтовыми/реактивными и самолетными самолетами). вертолеты), так что теоретически возможно, что будут выпущены рекомендации по разрешению проблем, требующие скорости набора высоты или снижения за пределами нормального/безопасного диапазона полета воздушного судна на определенном этапе полета (т. е. из-за текущей конфигурации воздушного судна). Более того, поскольку весь трафик рассматривается одинаково, не проводится никакого различия между различными типами воздушных судов, игнорируется возможность использования информации о конкретном воздушном судне (технических характеристиках) для выдачи индивидуальных и оптимизированных инструкций для любого конкретного конфликта трафика (т. е. путем выдачи набора высоты). инструкции тем самолетам, которые могут обеспечить наилучшую скорость набора высоты, в то же время выдавая инструкции по снижению самолетам, обеспечивающим сравнительно лучшую скорость снижения, тем самым, как мы надеемся, максимизируем изменение высоты в единицу времени, то есть эшелонирование). Например, TCAS может приказать самолету подняться, когда он уже находится на практическим потолке для своей текущей конфигурации. [ 45 ]
- TCAS в первую очередь ориентирована на экстраполяцию, поэтому она использует алгоритмы, пытающиеся аппроксимировать четырехмерное предсказание траектории с использованием «истории траектории полета», чтобы оценить текущую дорожную ситуацию в непосредственной близости от самолета, однако степень надежности данных и Полезность может быть значительно повышена за счет расширения указанной информации с ограниченным доступом к соответствующей информации о плане полета, а также к соответствующим инструкциям УВД, чтобы получить более полную картину планов и намерений других транспортных средств (маршрутов), так что прогнозы траектории полета больше не будут основано не только на оценках, но и на фактическом маршруте воздушного судна ( FMS план полета ) и указаниях УВД. Если TCAS модифицируется для использования данных, которые используются другими системами, потребуется позаботиться о том, чтобы риски типичных отказов были достаточно малы.
- TCAS не устанавливается на многие самолеты меньшего размера, главным образом из-за высоких затрат (от 25 000 до 150 000 долларов США). Например, многие небольшие частные бизнес-джеты в настоящее время по закону не обязаны иметь установку TCAS, хотя они летают в том же воздушном пространстве, что и более крупные самолеты, которые должны иметь на борту соответствующее оборудование TCAS. Система TCAS сможет работать в полную силу только в том случае, если все самолеты в любом воздушном пространстве будут иметь на борту правильно работающий блок TCAS.
- TCAS требует, чтобы оба конфликтующих самолета имели транспондеры. Если у одного самолета нет транспондера, он не будет предупреждать TCAS, поскольку информация не передается.
Чтобы преодолеть некоторые из этих ограничений, ФАУ разрабатывает новую логику предотвращения столкновений, основанную на динамическом программировании.
В ответ на серию столкновений в воздухе с участием коммерческих авиалайнеров в 1970-х годах Федеральное управление гражданской авиации поручило Лаборатории Линкольна принять участие в разработке бортовой системы предотвращения столкновений. В своем нынешнем виде система оповещения о дорожном движении и предотвращения столкновений обязательна во всем мире на всех крупных самолетах и значительно повысила безопасность авиаперелетов, но серьезные изменения в воздушном пространстве, запланированные на ближайшие годы, потребуют существенной модификации системы. [ 46 ]
БСПС X
[ редактировать ]Набор новых систем под названием ACAS X [ 47 ] будет использовать эту новую логику:
- ACAS Xa станет прямой заменой TCAS II, используя активное наблюдение.
- ACAS Xo будет системой предотвращения столкновений, настроенной на работу в некоторых сложных в настоящее время эксплуатационных ситуациях, в частности, при близко расположенных параллельных заходах на посадку.
- ACAS Xu обеспечит возможность ввода нескольких датчиков и будет оптимизирована для беспилотных бортовых систем.
- ACAS Xp будет разработан для самолетов только с пассивным наблюдением (ADS-B).
Первое отраслевое совещание, запланированное ФАУ, было проведено в октябре 2011 года в Вашингтоне, округ Колумбия, чтобы проинформировать производителей авионики о планах разработки ACAS X, включая демонстрационные полеты, запланированные на 2013 финансовый год. ФАУ заявляет, что его работа «будет иметь основополагающее значение для разработки минимальных стандартов эксплуатационных характеристик» для ACAS X от разработчика стандартов RTCA. [ 48 ]
Предполагается, что, если ACAS X будет дорабатываться и сертифицироваться, ACAS X не будет коммерчески доступен до середины 2020-х годов. Сообщается, что на данном этапе неясно, будет ли ACAS X обеспечивать какое-либо горизонтальное разрешение. [ 49 ]
Нормативно-правовая ситуация во всем мире
[ редактировать ]| Юрисдикция (Агентство) | Классификация самолетов | режим ТКАС | Дата мандата |
|---|---|---|---|
| Индия ( DGCA ) | Самолет с максимальной сертифицированной конфигурацией пассажирских мест более 30 мест или максимальной полезной нагрузкой более 3 тонн. [ 50 ] | ТКАС II | 31 декабря 1998 г. |
| США ( ФАУ ) | Все коммерческие транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 30 (или максимальная масса более 33 000 фунтов или 15 000 кг). | ТКАС II | 1 января 1994 г. |
| Европа ( ЕАСА ) | Все гражданские транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 30 (или максимальная масса более 15 000 кг). [ 51 ] | ТКАС II | 1 января 2000 г. |
| Европа ( ЕАСА ) | Все гражданские транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 19 (или максимальная масса более 5700 кг). [ 51 ] | ACAS II (фактически TCAS II версии 7.1) | 1 марта 2012 г. |
| Австралия ( ГЛАВНАЯ ) | Все коммерческие транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 30 (или максимальная масса более 15 000 кг). [ 52 ] | ТКАС II | 1 января 2000 г. |
| Гонконг ( Департамент гражданской авиации ) | Все самолеты в Гонконге с количеством пассажирских мест более 9 (или максимальная масса более 5700 кг) [ 53 ] | ТКАС II Версия 7.0 | 1 января 2000 г. |
| Бразилия ( Национальное агентство гражданской авиации ) | Все самолеты транспортной категории с количеством пассажирских мест более 30. | ТКАС II Версия 7.0 | 1 января 2008 г. |
| Перу ( Генеральное управление гражданской авиации ) | Все гражданские транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 19 (или максимальная масса более 5700 кг). [ 54 ] [ 55 ] | ACAS II (фактически TCAS II версии 7.0) | 1 января 2005 г. |
| Аргентина ( ANAC ) | Все гражданские транспортные самолеты с газотурбинными двигателями и количеством пассажирских мест более 19 (или максимальная масса более 5700 кг). [ 56 ] | ACAS II (фактически TCAS II версии 7.0) | 1 декабря 2014 г. |
См. также
[ редактировать ]- Автоматическое зависимое наблюдение – трансляция
- Система предупреждения о сближении с землей
- Столкновение в воздухе (MAC)
- Система предотвращения столкновений с препятствиями
- Портативная система предотвращения столкновений
- Система голосового оповещения
Ссылки
[ редактировать ]- ^ Перейти обратно: а б с д и ж г час я дж к Введение в TCAS II версии 7.1
- ^ Перейти обратно: а б с 20-151B – Сертификация летной годности систем оповещения о воздушном движении и предотвращения столкновений (TCAS II), версии 7.0 и 7.1 и связанных с ними транспондеров режима S (PDF) , faa.gov, 18 марта 2014 г., стр. C1 , получено 13 октября 2018 г.
- ^ «Боинг 737-300, D-ABEK и Gulfstream IV, N77SW, 26 февраля 1999 г.» . Отдел по расследованию авиационных происшествий . Архивировано (PDF) из оригинала 7 августа 2018 г.
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 12 марта 2016 г. Проверено 17 марта 2019 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Перейти обратно: а б с д и ж г час Введение в TCAS II версии 7 [ постоянная мертвая ссылка ]
- ^ Перейти обратно: а б с Материалы FAA DO-185 и деятельность RTCA SC-147. Архивировано 7 мая 2011 г. в Wayback Machine.
- ^ Перейти обратно: а б с Документ ИКАО 9863 - Глава 6. Архивировано 5 марта 2012 г. в Wayback Machine.
- ^ Тим Вюрфель (13 сентября 2018 г.). «Мнение: как правильно проводить модернизацию авионики» . Неделя авиации и космических технологий .
- ^ «Руководство пользователя системы Honeywell TCAS» (PDF) . Архивировано из оригинала (PDF) 7 октября 2011 г. Проверено 24 апреля 2011 г.
- ^ Рабочий пакет программы 1 ACAS. Архивировано 22 июля 2011 г. в Wayback Machine.
- ^ Перейти обратно: а б Предложение по изменению CP116. Архивировано 17 июля 2011 г. на Wayback Machine.
- ^ Перейти обратно: а б «Продукт – Центр сообщества» . my.rtca.org . Проверено 29 ноября 2020 г.
- ^ Перейти обратно: а б «Текущий технический стандартный приказ» . rgl.faa.gov . Проверено 29 ноября 2020 г.
- ^ Описание системы ADS-B для UAT. Архивировано 28 сентября 2011 г. на Wayback Machine.
- ^ «TCAS 7.1 | Откровенный разговор об ADSB» . Duncanaviation.aero. 01.03.2012. Архивировано из оригинала 16 мая 2013 г. Проверено 22 сентября 2013 г.
- ^ Возможное сотрудничество между TCAS и ASAS. Архивировано 17 июля 2011 г. в Wayback Machine.
- ^ «Техническое задание - Будущие отношения ADS-B / TCAS» (PDF) . Архивировано из оригинала (PDF) 29 сентября 2011 г. Проверено 24 апреля 2011 г.
- ^ Домашняя страница FAA TCAS. Архивировано 21 июля 2011 г. на Wayback Machine.
- ^ Положения ACAS II ИКАО, заархивированные 21 апреля 2010 г. в Wayback Machine.
- ^ «Техническое задание SC-147 – Редакция 9» (PDF) . Архивировано из оригинала (PDF) 29 сентября 2011 г. Проверено 28 августа 2011 г.
- ^ Перейти обратно: а б Критерии принятия мер регулирования для TCAS II версии 7.1. Архивировано 12 июня 2011 г. на Wayback Machine.
- ^ Предложение по изменению CP112E. Архивировано 9 января 2009 г. на Wayback Machine.
- ^ Предложение по изменению CP115. Архивировано 9 января 2009 г. на Wayback Machine.
- ^ Перейти обратно: а б с ЕВРОКОНТРОЛЬ - TCAS II, версия 7.1. Архивировано 21 апреля 2010 г. на Wayback Machine.
- ^ «ЕВРОКОНТРОЛЬ – Обзор и принципы БСПС II» . Eurocontrol.int. Архивировано из оригинала 27 сентября 2013 г. Проверено 22 сентября 2013 г.
- ^ «Отчет о проекте ATC-231» (PDF) . Архивировано из оригинала (PDF) 13 июня 2010 г. Проверено 24 апреля 2011 г.
- ^ Скайбрари БСПС
- ^ Перейти обратно: а б TCAS и транспондеры
- ^ Группа инженерных разработок FAA - Поддержка TCAS. Архивировано 26 апреля 2011 г. на Wayback Machine.
- ^ Отчет о расследовании BFU AX001-1-2/02. Архивировано 23 января 2007 г. в Wayback Machine.
- ^ Исследование безопасности TCAS - риск столкновения из-за проблем с безопасностью TCAS. Архивировано 5 марта 2012 г. на Wayback Machine.
- ^ Исследование безопасности TCAS - Риск столкновения из-за проблем с безопасностью TCAS (презентация). Архивировано 5 марта 2012 г. на Wayback Machine.
- ^ Приказ технического стандарта ФАУ TSO-C119c
- ^ Приказ Европейского технического стандарта ACT-C119c
- ^ Консультативный циркуляр ФАУ AC 20-151A - Утверждение летной годности систем оповещения о дорожном движении и предотвращения столкновений (TCAS II), версии 7.0 и 7.1 и связанных с ними транспондеров режима S
- ^ Документ с изложением позиции AEA по внедрению TCAS версии 7.1
- ^ Запрос EASA об отклонении № 56
- ^ Документ-ответ на комментарий (CRD) к NPA 2010-03. Архивировано 9 октября 2010 г. на Wayback Machine.
- ^ «Изменение ACSS 7.1 для TCAS II» . Архивировано из оригинала 14 сентября 2011 г. Проверено 27 августа 2011 г.
- ^ Пресс-релиз - ACSS сертифицирует изменение 7.1 для TCAS 2000 и Legacy TCAS II [ постоянная мертвая ссылка ]
- ^ Изменение ACSS 7.1 для флаера TCAS II [ постоянная мертвая ссылка ]
- ^ Honeywell Solutions для TCAS II Change 7.1. Архивировано 12 июля 2011 г. на Wayback Machine.
- ^ Продукты для наблюдения за дорожным движением Rockwell Collins
- ^ Перейти обратно: а б с д «TCASII-джин из бутылки?» . Asrs.arc.nasa.gov. 29 июля 1992 г. Проверено 22 сентября 2013 г.
- ^ «Новозеландский форум гражданской авиации «Близкая встреча B747 в воздухе»» . Авиалайнеры.нет . Проверено 22 сентября 2013 г.
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 10 февраля 2015 г. Проверено 9 февраля 2014 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ «99-Бортовая система предотвращения столкновений (ACAS X) - 12302 (в архиве) - Возможности федерального бизнеса: возможности» . Fbo.gov. 10 сентября 2012 г. Проверено 22 сентября 2013 г.
- ^ «ФАУ разрабатывает TCAS следующего поколения» . Aviationweek.com. 12 сентября 2012 г. Архивировано из оригинала 27 сентября 2013 г. Проверено 22 сентября 2013 г.
- ^ «ЕВРОКОНТРОЛЬ – Часто задаваемые вопросы (FAQ)» . Eurocontrol.int. Архивировано из оригинала 12 мая 2008 г. Проверено 22 сентября 2013 г.
- ^ «Циркуляр воздушного транспорта №» . Dgca.nic.in. 31 декабря 1998 г. Проверено 22 сентября 2013 г.
- ^ Перейти обратно: а б Европейский мандат ACAS II. Архивировано 21 апреля 2010 г. в Wayback Machine.
- ^ Пояснительное заявление относительно TCAS для CASA (PDF). Архивировано 22 августа 2006 г. в Wayback Machine.
- ^ Уведомление о летной годности № 24 (PDF), заархивировано 28 сентября 2007 г. в Wayback Machine.
- ^ DGAC Perú - RAP 121 - Подчасть K (PDF). Архивировано 22 июля 2011 г. в Wayback Machine.
- ^ DGAC Perú - RAP 135 - Подчасть C (PDF). Архивировано 22 июля 2011 г. в Wayback Machine.
- ^ ANAC - Правила гражданской авиации Аргентины
Внешние ссылки
[ редактировать ]- Веб-сайт БСПС ЕВРОКОНТРОЛЯ
- TCAS II Версия 7.1
- Обсуждение TCAS. Архивировано 31 августа 2005 г. на Wayback Machine.
- Критическое обсуждение TCAS с использованием гипотетических сценариев злоупотребления/эксплуатации использования TCAS
- Введение в TCAS II версии 7.1
- Критерии принятия мер регулирования по TCAS II версии 7.1
- Видеоинструментарий TCAS User Interface Awareness на Skybrary
- Предотвращение столкновений в UKCS (испытание TCAS II), Марк Прайор (Бристоу)
- Бьорн Ферм (13 июля 2018 г.). «Уголок Бьорна: крупнейшее изменение навигации со времен радара, часть 5» . Лихэм Ньюс .