Электродвигатель

Электродвигатель , – это электрическая машина преобразующая электрическую энергию в механическую . двигателя Большинство электродвигателей работают за счет взаимодействия магнитного поля и электрического тока в обмотке провода, создавая силу в виде крутящего момента, приложенного к валу двигателя. Электрический генератор механически идентичен электродвигателю, но работает в обратном порядке, преобразуя механическую энергию в электрическую.
Электродвигатели могут питаться от источников постоянного тока (DC), например, от батарей или выпрямителей , или от источников переменного тока (AC), таких как электросеть, инверторы или электрические генераторы.
Электродвигатели можно классифицировать по таким критериям, как тип источника питания, конструкция, применение и тип выходной мощности. Они могут быть щеточными или бесщеточными , однофазными , двухфазными или трехфазными , с осевым или радиальным потоком и могут иметь воздушное или жидкостное охлаждение.
Стандартизированные двигатели обеспечивают мощность для промышленного использования. Самые крупные из них используются для привода судов, сжатия трубопроводов и гидроаккумулирующих установок, их мощность превышает 100 мегаватт .
Приложения включают промышленные вентиляторы, воздуходувки и насосы, станки, бытовую технику, электроинструменты, транспортные средства и дисководы. Маленькие моторчики можно найти в электрических часах. В некоторых приложениях, например, при рекуперативном торможении тяговых двигателей , электродвигатели могут использоваться в режиме реверса в качестве генераторов для рекуперации энергии, которая в противном случае могла бы быть потеряна в виде тепла и трения.
Электродвигатели создают линейную или вращательную силу ( крутящий момент ), предназначенную для приведения в движение какого-либо внешнего механизма. Это делает их своего рода приводом . Обычно они предназначены для непрерывного вращения или для линейного перемещения на значительное расстояние по сравнению с его размером. Соленоиды также преобразуют электрическую энергию в механическое движение, но только на ограниченном расстоянии.
История
[ редактировать ]Ранние моторы
[ редактировать ]
До появления современных электромагнитных двигателей были исследованы экспериментальные двигатели, работающие за счет электростатической силы. Первые электродвигатели представляли собой простые электростатические устройства, описанные в экспериментах шотландского монаха Эндрю Гордона и американского экспериментатора Бенджамина Франклина в 1740-х годах. [ 2 ] [ 3 ] Теоретический принцип, лежащий в их основе, закон Кулона , был открыт, но не опубликован Генри Кавендишем в 1771 году. Этот закон был независимо открыт Шарлем-Огюстеном де Кулоном в 1785 году, который опубликовал его так, что теперь он известен под его именем. [ 4 ] Из-за сложности создания необходимого для них высокого напряжения электростатические двигатели никогда не использовались в практических целях.
Изобретение электрохимической батареи Алессандро Вольтой в 1799 году. [ 5 ] сделало возможным производство постоянных электрических токов. Ганс Христиан Эрстед открыл в 1820 году, что электрический ток создает магнитное поле, которое может оказывать воздействие на магнит. потребовалось всего несколько недель, Андре-Мари Амперу чтобы разработать первую формулировку электромагнитного взаимодействия и представить закон силы Ампера , который описывал возникновение механической силы путем взаимодействия электрического тока и магнитного поля. [ 6 ]
Первую демонстрацию эффекта при вращательном движении дал Майкл Фарадей 3 сентября 1821 года в подвале Королевского института . [ 7 ] Свободно свисающую проволоку погружали в ванну с ртутью, на которой постоянный магнит (ПМ) размещали . Когда по проводу пропускали ток, провод вращался вокруг магнита, показывая, что ток порождает замкнутое круговое магнитное поле вокруг провода. [ 8 ] Фарадей опубликовал результаты своего открытия в Ежеквартальном журнале науки и разослал копии своей статьи вместе с карманными моделями своего устройства коллегам по всему миру, чтобы они также могли стать свидетелями явления электромагнитного вращения. [ 7 ] Этот двигатель часто демонстрируется в физических экспериментах, заменяя рассолом (токсичную) ртуть . Колесо Барлоу было ранним усовершенствованием этой демонстрации Фарадея, хотя эти и подобные униполярные двигатели оставались непригодными для практического применения до конца века.


В 1827 году венгерский физик Аньос Едлик начал экспериментировать с электромагнитными катушками . После того, как Джедлик решил технические проблемы непрерывного вращения с изобретением коммутатора , он назвал свои ранние устройства «электромагнитными автороторами». Хотя они использовались только для обучения, в 1828 году Джедлик продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока : статор , ротор и коллектор. В устройстве не использовались постоянные магниты, поскольку магнитные поля как стационарных, так и вращающихся компонентов создавались исключительно токами, протекающими через их обмотки. [ 10 ] [ 11 ] [ 12 ] [ 13 ] [ 14 ] [ 15 ] [ 16 ]
двигатели постоянного тока
[ редактировать ]Первый коммутатор Электродвигатель постоянного тока, способный вращать механизмы, был изобретен английским ученым Уильямом Стердженом в 1832 году. [ 17 ] построили электродвигатель постоянного тока коллекторного типа Следуя работам Стерджена, американский изобретатели Томас Дэвенпорт и Эмили Дэвенпорт . [ 18 ] который он запатентовал в 1837 году. Двигатели работали со скоростью до 600 оборотов в минуту и приводили в действие станки и печатный станок. [ 19 ] Из-за высокой стоимости первичной батареи двигатели оказались коммерчески неудачными и привели компанию Davenports к банкротству. Несколько изобретателей последовали примеру Стерджена в разработке двигателей постоянного тока, но все они столкнулись с одинаковыми проблемами стоимости батарей. Поскольку распределения электроэнергии , для этих двигателей не возникло практического коммерческого рынка. в то время не было системы [ 20 ]
После многих других более или менее успешных попыток с относительно слабыми вращающимися и возвратно-поступательными аппаратами прусский/русский Мориц фон Якоби в мае 1834 года создал первый настоящий вращающийся электродвигатель. Он развивал замечательную механическую выходную мощность. Его мотор установил мировой рекорд, который Якоби улучшил четыре года спустя, в сентябре 1838 года. [ 21 ] Его второй мотор был достаточно мощным, чтобы переправить лодку с 14 людьми через широкую реку. Также в 1839/40 году другим разработчикам удалось построить двигатели с аналогичными, а затем и более высокими характеристиками.
В 1827–1828 годах Джедлик построил устройство, использующее принципы, аналогичные тем, которые использовались в его электромагнитных автороторах, и которое было способно выполнять полезную работу. [ 22 ] [ 23 ] [ 24 ] [ 25 ] [ 26 ] [ 27 ] [ 10 ] [ 16 ] В том же году он построил модель электромобиля . [ 28 ]
Главный поворотный момент наступил в 1864 году, когда Антонио Пачинотти впервые описал кольцевой якорь (хотя первоначально он задумывался как генератор постоянного тока, то есть динамо-машина). [ 6 ] Он представлял собой симметрично сгруппированные замкнутые между собой катушки, соединенные с стержнями коллектора, щетки которого отдавали практически неколеблющийся ток. [ 29 ] [ 30 ] Первые коммерчески успешные двигатели постоянного тока последовали за разработками Зеноба Грамма , который в 1871 году заново изобрел конструкцию Пачинотти и перенял некоторые решения Вернера Сименса .
Польза для машин постоянного тока заключалась в открытии обратимости электрических машин, о котором объявил Сименс в 1867 году и наблюдал Пачинотти в 1869 году. [ 6 ] Грамм случайно продемонстрировал его по случаю Всемирной выставки в Вене 1873 года , когда он соединил два таких устройства постоянного тока на расстоянии до 2 км друг от друга, используя одно из них в качестве генератора, а другое — в качестве двигателя. [ 31 ]
Барабанный ротор был представлен Фридрихом фон Хефнер-Альтенеком из Siemens & Halske для замены кольцевого якоря Пачинотти в 1872 году, тем самым повысив эффективность машины. [ 6 ] В следующем году компания Siemens & Halske представила ламинированный ротор, позволивший снизить потери в железе и увеличить наведенное напряжение. В 1880 году Йонас Венстрем снабдил ротор пазами для размещения обмотки, что еще больше повысило эффективность.
В 1886 году Фрэнк Джулиан Спрэг изобрел первый практичный двигатель постоянного тока — искробезопасное устройство, поддерживающее относительно постоянную скорость при переменных нагрузках. Другие электрические изобретения Спрэга примерно в это же время значительно улучшили распределение электроэнергии в сети (предыдущая работа была проделана во время работы Томасом Эдисоном ), позволили возвращать мощность электродвигателей в электрическую сеть, обеспечили распределение электроэнергии на троллейбусы через воздушные провода и опору троллейбуса. и предоставил системы управления электрическими операциями. Это позволило Спрэгу использовать электродвигатели для изобретения первой системы электрического троллейбуса в 1887–88 годах в Ричмонде, штат Вирджиния , электрического лифта и системы управления в 1892 году, а также электрического метро с вагонами с центральным управлением с независимым приводом. Последние были впервые установлены в 1892 году в Чикаго на южной надземной железной дороге , где они стали широко известны как « L ». Двигатель Спрага и связанные с ним изобретения привели к взрывному росту интереса к использованию электродвигателей в промышленности. Разработка электродвигателей приемлемого КПД была отложена на несколько десятилетий из-за неспособности признать чрезвычайную важность воздушный зазор между ротором и статором. Эффективные конструкции имеют сравнительно небольшой воздушный зазор. [ 32 ] [ а ] Двигатель Сент-Луиса, долгое время используемый в классах для иллюстрации принципов движения, неэффективен по той же причине и не похож на современный двигатель. [ 34 ]
Электродвигатели произвели революцию в промышленности. Промышленные процессы больше не ограничивались передачей мощности с использованием линейных валов, ремней, сжатого воздуха или гидравлического давления. Вместо этого каждая машина может быть оснащена собственным источником питания, что обеспечит простоту управления в точке использования и повысит эффективность передачи энергии. Электродвигатели, применяемые в сельском хозяйстве, лишили людей и животных мускульной силы при выполнении таких задач, как обработка зерна или перекачка воды. Использование электродвигателей в домашних условиях (например, в стиральных и посудомоечных машинах, вентиляторах, кондиционерах и холодильниках (вместо холодильных ящиков )) сократило тяжелый труд в доме и сделало возможным более высокие стандарты удобства, комфорта и безопасности. Сегодня электродвигатели потребляют более половины электроэнергии. электроэнергии, произведенной в США. [ 35 ]
двигатели переменного тока
[ редактировать ]В 1824 году французский физик Франсуа Араго сформулировал существование вращающихся магнитных полей , названных вращением Араго , которое, вручную включая и выключая переключатели, Уолтер Бейли продемонстрировал в 1879 году как, по сути, первый примитивный асинхронный двигатель . [ 36 ] [ 37 ] [ 38 ] [ 39 ] В 1880-х годах многие изобретатели пытались разработать работоспособные двигатели переменного тока. [ 40 ] потому что преимущества переменного тока в передаче высокого напряжения на большие расстояния нивелировались невозможностью управлять двигателями переменного тока.
Первый бесколлекторный асинхронный двигатель переменного тока был изобретен Галилео Феррарисом в 1885 году. Феррарис смог улучшить свою первую конструкцию, создав более совершенные установки в 1886 году. [ 41 ] В 1888 году Королевская академия наук Турина опубликовала исследование Феррариса, подробно описывающее основы работы двигателя, при этом в то время пришла к выводу, что «аппарат, основанный на этом принципе, не может иметь никакого коммерческого значения в качестве двигателя». [ 39 ] [ 42 ] [ 43 ]
Возможное промышленное развитие было предвидено Николой Теслой , который самостоятельно изобрел свой асинхронный двигатель в 1887 году и получил патент в мае 1888 года. В том же году Тесла представил AIEE свою статью « система двигателей и трансформаторов переменного тока» Новая , в которой были описаны три запатентованных Типы двухфазных четырехполюсных двигателей статора: один с четырехполюсным ротором, образующим несамозапускающийся реактивный двигатель , другой с фазным ротором, образующий самозапускающийся асинхронный двигатель , и третий настоящий синхронный двигатель с отдельно Подача возбужденного постоянного тока на обмотку ротора. Однако в одном из патентов, поданных Теслой в 1887 году, также описывался асинхронный двигатель с короткозамкнутым ротором. Джордж Вестингауз , который уже приобрел права на Ferrari (1000 долларов США), быстро купил патенты Теслы (60 000 долларов США плюс 2,50 доллара США за проданную л.с., выплачиваемые до 1897 года), [ 41 ] нанял Теслу для разработки своих двигателей и поручил К. Ф. Скотту помочь Тесле; однако в 1889 году Тесла ушел ради других занятий. [ 44 ] [ 45 ] [ 46 ] [ 47 ] Было обнаружено, что асинхронный двигатель переменного тока с постоянной скоростью не подходит для трамваев. [ 40 ] но инженеры Westinghouse успешно адаптировали его для обеспечения горнодобывающей деятельности в Теллурайде, штат Колорадо, в 1891 году. [ 48 ] [ 49 ] [ 50 ] Компания Westinghouse создала свой первый практический асинхронный двигатель в 1892 году и разработала линейку многофазных асинхронных двигателей частотой 60 Гц в 1893 году, но эти ранние двигатели Westinghouse были двухфазными двигателями с фазным ротором. Позднее Б. Г. Ламме разработал ротор намотки вращающегося стержня. [ 44 ]
Настойчиво продвигая разработку трехфазной технологии, Михаил Доливо-Добровольский в 1889 году изобрел трехфазный асинхронный двигатель обоих типов с короткозамкнутым ротором и фазным ротором с пусковым реостатом, а также трехлинейный трансформатор в 1890 году. После соглашения Между AEG и Maschinenfabrik Oerlikon Доливо-Добровольски и Чарльз Юджин Ланселот Браун разработали более крупные модели, а именно «беличью клетку» мощностью 20 л.с. и роторный ротор мощностью 100 л.с. с пусковым реостатом. Это были первые трехфазные асинхронные двигатели, пригодные для практической эксплуатации. [ 41 ] С 1889 года аналогичные разработки трехфазных машин были начаты Венстрёмом. На Франкфуртской международной электротехнической выставке 1891 года была успешно представлена первая трехфазная система дальней связи. Она была рассчитана на напряжение 15 кВ и простиралась на 175 км от водопада Лауффен на реке Неккар. Электростанция Лауффена включала в себя генератор переменного тока мощностью 240 кВт, 86 В, 40 Гц и повышающий трансформатор, а на выставке понижающий трансформатор питал трехфазный асинхронный двигатель мощностью 100 л. источник питания. [ 41 ] Трехфазная индукция сейчас используется в подавляющем большинстве коммерческих приложений. [ 51 ] [ 52 ] Михаил Доливо-Добровольский утверждал, что двигатель Теслы непрактичен из-за двухфазных пульсаций, что и побудило его продолжать трехфазную работу. [ 53 ]
Компания General Electric начала разработку трехфазных асинхронных двигателей в 1891 году. [ 44 ] К 1896 году General Electric и Westinghouse подписали соглашение о взаимном лицензировании конструкции ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором . [ 44 ] Усовершенствования асинхронных двигателей, вытекающие из этих изобретений и инноваций, были таковы, что асинхронный двигатель мощностью 100 лошадиных сил в настоящее время имеет те же установочные размеры, что и двигатель мощностью 7,5 лошадиных сил в 1897 году. [ 44 ]
Двадцать первый век
[ редактировать ]В 2022 году объем продаж электродвигателей оценивается в 800 миллионов единиц, ежегодно увеличиваясь на 10%. Электродвигатели потребляют ≈50% мировой электроэнергии. [ 54 ] С 1980-х годов доля рынка двигателей постоянного тока сократилась в пользу двигателей переменного тока. [ 55 ] : 89 [ нужны разъяснения ]
Компоненты
[ редактировать ]
Электродвигатель состоит из двух механических частей: ротора, который движется, и статора, который неподвижен. Электрически двигатель состоит из двух частей: магнитов возбуждения и якоря, одна из которых прикреплена к ротору, а другая — к статору. Вместе они образуют магнитную цепь . [ 56 ] Магниты создают магнитное поле, которое проходит через якорь. Это могут быть электромагниты или постоянные магниты . Полевой магнит обычно находится на статоре, а якорь на роторе, но их можно поменять местами.
Ротор
[ редактировать ]Ротор — это движущаяся часть, передающая механическую энергию. Ротор обычно содержит проводники, по которым течет ток, на который магнитное поле статора воздействует с силой, вращающей вал. [ 57 ]
Статор
[ редактировать ]Статор окружает ротор и обычно содержит магниты поля, которые представляют собой либо электромагниты (проволочные обмотки вокруг ферромагнитного железного сердечника), либо постоянные магниты . Они создают магнитное поле , которое проходит через якорь ротора, оказывая силу на обмотки ротора. Сердечник статора состоит из множества тонких металлических листов, изолированных друг от друга и называемых пластинами. Эти пластины изготовлены из электротехнической стали , которая имеет заданную магнитную проницаемость, гистерезис и насыщение. Пластины уменьшают потери, которые могут возникнуть в результате наведенных циркулирующих вихревых токов, которые протекали бы, если бы использовался твердый сердечник. Двигатели переменного тока с питанием от сети обычно фиксируют провода внутри обмоток, пропитывая их лаком в вакууме. Это предотвращает вибрацию проводов в обмотке друг относительно друга, что может привести к истиранию изоляции провода и вызвать преждевременный выход из строя. Двигатели в смоляном корпусе, используемые в погружных насосах для глубоких скважин, стиральных машинах и кондиционерах, герметизируют статор из пластиковой смолы для предотвращения коррозии и/или снижения кондуктивного шума. [ 58 ]
Зазор
[ редактировать ]Воздушный зазор между статором и ротором позволяет ему вращаться. Ширина зазора оказывает существенное влияние на электрические характеристики двигателя. Обычно его делают как можно меньшим, так как большой зазор снижает производительность. И наоборот, слишком маленькие зазоры могут создавать не только шум, но и трение.
Арматура
[ редактировать ]Якорь ферромагнитном состоит из проволочных обмоток на . сердечнике Электрический ток, проходящий по проводу, заставляет магнитное поле оказывать на него силу ( силу Лоренца ), вращая ротор. Обмотки представляют собой спиральные провода, обернутые вокруг ламинированного мягкого железного ферромагнитного сердечника, образующего магнитные полюса при подаче тока.
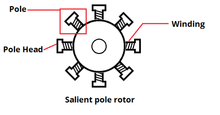
Электрические машины бывают с явнополюсными и неявнополюсными конфигурациями. В явнополюсном двигателе ферромагнитные сердечники ротора и статора имеют выступы, называемые полюсами, обращенные друг к другу. Провод наматывается вокруг каждого полюса под лицевой стороной полюса, который становится северным или южным полюсом, когда по проводу протекает ток. В неявнополюсном двигателе (с распределенным полем или круглым ротором) ферромагнитный сердечник представляет собой гладкий цилиндр с обмотками, равномерно распределенными в пазах по окружности. Подача переменного тока в обмотки создает полюса в сердечнике, которые постоянно вращаются. [ 59 ] Двигатель с экранированным полюсом имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
Коммутатор
[ редактировать ]
Коммутатор — это поворотный электрический переключатель , который подает ток на ротор. Он периодически меняет направление тока в обмотках ротора при вращении вала. Он состоит из цилиндра, состоящего из нескольких металлических контактных сегментов на якоре . Два или более электрических контакта , называемые « щетками », изготовленные из мягкого проводящего материала, такого как уголь, прижимаются к коммутатору. Щетки вступают в скользящий контакт с последовательными сегментами коллектора при вращении ротатора, подавая ток на ротор. Обмотки ротора соединены с сегментами коллектора. Коммутатор меняет направление тока в обмотках ротора с каждым полуоборотом (180°), поэтому крутящий момент, приложенный к ротору, всегда направлен в одном и том же направлении. [ 60 ] Без этого реверса направление крутящего момента на каждой обмотке ротора менялось бы с каждым полуоборотом, останавливая ротор. Коммутируемые двигатели в основном были заменены бесщеточными двигателями , двигателями с постоянными магнитами и асинхронными двигателями .
Вал
[ редактировать ]Вал двигателя выходит за пределы двигателя, где он воспринимает нагрузку. Поскольку силы нагрузки действуют за пределами самой внешней опоры, говорят, что нагрузка находится нависающей. [ 61 ]
Подшипники
[ редактировать ]Ротор поддерживается подшипниками , которые позволяют ротору вращаться вокруг своей оси за счет передачи силы осевых и радиальных нагрузок от вала к корпусу двигателя. [ 61 ]
Входы
[ редактировать ]Источник питания
[ редактировать ]Двигатель постоянного тока обычно питается через коллектор с разъемным кольцом, как описано выше.
Коммутация двигателей переменного тока может осуществляться либо с помощью контактного коллектора, либо с помощью внешней коммутации. Это может быть тип управления с фиксированной или регулируемой скоростью, а также синхронный или асинхронный. Универсальные двигатели могут работать как на переменном, так и на постоянном токе.
Контроль
[ редактировать ]Двигатели постоянного тока могут работать с переменной скоростью, регулируя напряжение, подаваемое на клеммы, или используя широтно-импульсную модуляцию (ШИМ).
Двигатели переменного тока, работающие на фиксированной скорости, обычно питаются непосредственно от сети или через устройства плавного пуска двигателя .
Двигатели переменного тока, работающие с переменной скоростью, питаются от различных преобразователей мощности , частотно-регулируемых приводов или электронных коммутаторов.
Термин «электронный коммутатор» обычно ассоциируется с самокоммутируемым бесщеточным двигателем постоянного тока и вентильным реактивным двигателем .
Типы
[ редактировать ]Электродвигатели работают на одном из трех физических принципов: магнетизме , электростатике и пьезоэлектричестве .
В магнитных двигателях магнитные поля образуются как в роторе, так и в статоре. Продукт между этими двумя полями создает силу и, следовательно, крутящий момент на валу двигателя. Одно или оба этих поля изменяются при вращении ротора. Это достигается путем включения и выключения шестов в нужное время или изменения силы шеста.
Двигатели работают либо от постоянного, либо от переменного тока (или от того и другого). [ 62 ]
Двигатели переменного тока могут быть как асинхронными, так и синхронными. [ 63 ] Синхронные двигатели требуют, чтобы ротор вращался с той же скоростью, что и вращающееся поле статора. Асинхронные роторы ослабляют это ограничение.
Двигатель с дробной мощностью либо имеет мощность менее 1 лошадиной силы (0,746 кВт), либо изготавливается с размером корпуса меньше, чем стандартный двигатель мощностью 1 л.с. Многие бытовые и промышленные двигатели относятся к классу дробных лошадиных сил.
| Самокоммутируемый | Внешне коммутируемый | |||
|---|---|---|---|---|
| Механический коммутатор | Электронный коммутатор [ 70 ] [ б ] | Асинхронный | синхронный 2 | |
| переменного тока [ 72 ] [ с ] | округ Колумбия | переменного тока 5 , 6 | переменного тока 6 | |
|
Электрически
взволнованный:
ПМ |
Ротор ПМ:
Ферромагнитный ротор: |
Трехфазный:
Двухфазный (конденсатор) Однофазный:
|
WRSM , PMSM или BLAC: [ 70 ]
Гистерезис Гибридный:
|
| Простая электроника | выпрямитель,
линейный транзистор(ы) или прерыватель постоянного тока |
Более подробный
электроника |
Самый сложный
электроника ( ЧРП ), если таковая предусмотрена | |
Примечания:
1. Вращение не зависит от частоты переменного напряжения.
2. Вращение равно синхронной скорости (скорости двигателя-статора-поля).
3. В SCIM вращение с фиксированной скоростью равно синхронной скорости, за вычетом скорости скольжения.
4. В противоскользящих системах рекуперации энергии WRIM обычно используется для запуска двигателя, но его можно использовать и для изменения скорости нагрузки.
5. Работа с переменной скоростью.
6. В то время как приводы с асинхронными и синхронными двигателями обычно имеют выходной сигнал либо с шестиступенчатой, либо с синусоидальной формой, приводы с двигателями BLDC обычно имеют форму сигнала тока с трапециевидной формой; Однако поведение как синусоидальных, так и трапециевидных машин с ПМ идентично с точки зрения их фундаментальных аспектов. [ 74 ]
7. При работе с переменной скоростью WRIM используется в системах рекуперации энергии скольжения и асинхронных машинах с двойной подачей.
8. Замкнутая обмотка представляет собой короткозамкнутый короткозамкнутый ротор, намотанная обмотка подключается снаружи через контактные кольца.
9. В основном однофазные, иногда трехфазные.
Сокращения:
- BLAC – бесщеточный переменный ток
- BLDC – бесщеточный постоянный ток
- БЛДМ – Бесщеточный двигатель постоянного тока
- EC – Электронный коммутатор
- ПМ – Постоянный магнит
- IPMSM - Внутренний синхронный двигатель с постоянными магнитами
- PMSM – Синхронный двигатель с постоянными магнитами
- SPMSM - Синхронный двигатель с поверхностными постоянными магнитами
- SCIM – с короткозамкнутым ротором асинхронный двигатель
- SRM – Реактивный двигатель с переключателем
- SyRM – Синхронный реактивный двигатель
- VFD – Частотно-регулируемый привод
- WRIM – Асинхронный двигатель с фазным ротором
- WRSM - Синхронный двигатель с фазным ротором
- LRA – Усилители с заблокированным ротором: ток, который можно ожидать в пусковых условиях при подаче полного напряжения. Это происходит мгновенно при запуске.
- RLA – Номинальный ток нагрузки: максимальный ток, который двигатель должен потреблять в любых условиях эксплуатации. Часто их ошибочно называют усилителями рабочей нагрузки, что заставляет людей ошибочно полагать, что двигатель всегда должен потреблять эти усилители.
- FLA – Усилители полной нагрузки: в 1976 году изменены на «RLA – Усилители номинальной нагрузки».
Самокоммутируемый двигатель
[ редактировать ]Матовый двигатель постоянного тока
[ редактировать ]Большинство двигателей постоянного тока представляют собой небольшие двигатели с постоянными магнитами (ПМ). Они содержат щеточную внутреннюю механическую коммутацию для изменения направления тока обмоток двигателя синхронно с вращением. [ 75 ]
Двигатель постоянного тока с электрическим возбуждением
[ редактировать ]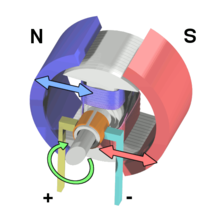
Коммутируемый двигатель постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу. На валу также находится коммутатор. Таким образом, через обмотки каждого коллекторного двигателя постоянного тока протекает переменный ток. Ток протекает через одну или несколько пар щеток, соприкасающихся с коллектором; щетки подключают внешний источник электроэнергии к вращающемуся якорю.
Вращающийся якорь состоит из одной или нескольких проволочных катушек, намотанных на ламинированный магнитно-мягкий ферромагнитный сердечник. Ток от щеток протекает через коллектор и одну обмотку якоря, делая его временным магнитом (электромагнитом ) . Создаваемое магнитное поле взаимодействует со стационарным магнитным полем, создаваемым либо постоянными магнитами, либо другой обмоткой (катушкой возбуждения), являющейся частью корпуса двигателя. Сила между двумя магнитными полями вращает вал. Коммутатор переключает питание на катушки при вращении ротора, не позволяя полюсам полностью совпадать с магнитными полюсами поля статора, так что ротор продолжает вращаться, пока подается питание.
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью поддержания контакта с коллектором щетками, создавая трение. Щетки создают искры при пересечении изолирующих зазоров между секциями коллектора. В зависимости от конструкции коммутатора щетки могут создавать короткие замыкания между соседними секциями и, следовательно, концами катушки. катушек ротора Более того, индуктивность приводит к увеличению напряжения на каждой из них, когда ее цепь размыкается, что увеличивает искрение. Это искрообразование ограничивает максимальную скорость машины, поскольку слишком быстрое искрообразование приведет к перегреву, разрушению или даже расплавлению коллектора. Плотность тока на единицу площади щеток в сочетании с их удельным сопротивлением ограничивает мощность двигателя. Пересечение промежутков также создает электрический шум ; искрение генерирует радиочастотные помехи . Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и обслуживанию или замене. Коллекторный узел на большом двигателе — дорогостоящий элемент, требующий точной сборки многих деталей. В двигателях небольшой мощности коллектор обычно встроен в ротор, поэтому его замена обычно требует замены ротора.
Хотя большинство коммутаторов имеют цилиндрическую форму, некоторые из них представляют собой плоские сегментированные диски, установленные на изоляторе.
Большие щетки создают большую площадь контакта, что максимизирует мощность двигателя, в то время как маленькие щетки имеют малую массу, что позволяет максимально увеличить скорость, с которой двигатель может работать без чрезмерного искрения. (Маленькие щетки желательны из-за их более низкой стоимости.) Более жесткие пружины щеток можно использовать, чтобы заставить щетки заданной массы работать с более высокой скоростью, несмотря на большие потери на трение (меньший КПД) и ускоренный износ щеток и коллектора. Таким образом, конструкция щеток двигателя постоянного тока предполагает компромисс между выходной мощностью, скоростью и эффективностью/износом.
Машины постоянного тока определяются следующим образом: [ 76 ]
- Цепь якоря – обмотка, несущая нагрузку, стационарную или вращающуюся.
- Схема возбуждения – набор обмоток, создающих магнитное поле.
- Коммутация: Механический метод, с помощью которого можно добиться выпрямления или получить постоянный ток.

Пять типов коллекторных двигателей постоянного тока:
- Шунтовое ранение
- Серийная намотка
- Соединение (две конфигурации):
- Накопительное соединение
- Дифференциально составленный
- Постоянный магнит (не показан)
- Отдельно возбуждается (не показано).
Постоянный магнит
[ редактировать ]Двигатель с постоянными магнитами (ПМ) не имеет обмотки возбуждения на корпусе статора, вместо этого он полагается на ПМ для создания магнитного поля. Компенсационные обмотки, включенные последовательно с якорем, могут использоваться в двигателях большой мощности для улучшения коммутации под нагрузкой. Это поле является фиксированным и не может быть изменено для управления скоростью. Поля с постоянными магнитами (статоры) удобны в миниатюрных двигателях, поскольку позволяют исключить энергопотребление обмотки возбуждения. Большинство более крупных двигателей постоянного тока относятся к типу «динамо» и имеют обмотки статора. Исторически сложилось так, что ПМ нельзя было заставить сохранять высокий поток, если их разобрать; обмотки возбуждения были более практичными для получения необходимого потока. Однако большие ПМ дороги, а также опасны и сложны в сборке; это благоприятствует намотанным полям для больших машин.
Чтобы минимизировать общий вес и размер, в миниатюрных двигателях с постоянными магнитами могут использоваться высокоэнергетические магниты, изготовленные из неодима ; большинство из них представляют собой сплавы неодим-железо-бор. Благодаря более высокой плотности магнитного потока электрические машины с высокоэнергетическими ПЭУ, по крайней мере, конкурируют со всеми оптимально спроектированными питанием синхронными и асинхронными электрическими машинами с одинарным . Миниатюрные двигатели напоминают конструкцию, показанную на иллюстрации, за исключением того, что они имеют как минимум три полюса ротора (чтобы обеспечить запуск независимо от положения ротора), а их внешний корпус представляет собой стальную трубку, которая магнитно связывает внешние части изогнутых магнитов поля.
Электронный коммутатор (ЭК)
[ редактировать ]Бесщеточный постоянный ток
[ редактировать ]Некоторые проблемы коллекторного двигателя постоянного тока устранены в конструкции BLDC. В этом двигателе механический «вращающийся переключатель» или коммутатор заменен внешним электронным переключателем, синхронизированным с положением ротора. Двигатели BLDC обычно имеют КПД 85%+, достигая 96,5%, [ 77 ] в то время как коллекторные двигатели постоянного тока обычно имеют КПД 75–80%.
(CEMF) двигателя BLDC Характерная трапецеидальная форма волны противоэлектродвижущей силы частично обусловлена равномерным распределением обмоток статора, а частично - расположением постоянных магнитов ротора. Обмотки статора трапециевидных двигателей BLDC, также известные как электронно-коммутируемые двигатели постоянного тока или двигатели постоянного тока с вывернутым наружу, могут быть однофазными, двухфазными или трехфазными и использовать датчики Холла, установленные на их обмотках для определения положения ротора и недорогого закрытого типа. -контурное управление коммутатором .
Двигатели BLDC обычно используются там, где необходим точный контроль скорости, например, в компьютерных дисководах или видеомагнитофонах. Шпиндели в дисководах для компакт-дисков, CD-ROM (и т. д.) и механизмы в офисных продуктах, таких как вентиляторы, лазерные принтеры и копировальные аппараты. Они имеют ряд преимуществ перед обычными моторами:
- Они более эффективны, чем вентиляторы переменного тока с двигателями с экранированными полюсами, и работают намного холоднее, чем их аналоги переменного тока. Эта холодная работа приводит к значительному увеличению срока службы подшипников вентилятора.
- Без коллектора срок службы двигателя BLDC может быть значительно дольше по сравнению с коллекторным двигателем постоянного тока с коллектором. Коммутация имеет тенденцию вызывать электрические и радиочастотные помехи; без коммутатора и щеток двигатель BLDC можно использовать в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же датчики Холла , которые обеспечивают коммутацию, могут обеспечить удобный сигнал тахометра для приложений управления с обратной связью (сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор в порядке», а также для обеспечения обратной связи по скорости вращения.
- Двигатель можно синхронизировать с внутренними или внешними часами, обеспечивая точный контроль скорости.
- Двигатели BLDC не искрят, что делает их более подходящими для работы в средах с летучими химическими веществами и топливом. При искрении также образуется озон, который может накапливаться в плохо вентилируемых зданиях.
- Двигатели BLDC обычно используются в небольшом оборудовании, таком как компьютеры, и обычно используются в вентиляторах для отвода тепла.
- Они издают мало шума, что является преимуществом для оборудования, подверженного вибрациям.
Мощность современных двигателей BLDC варьируется от долей ватта до многих киловатт. В электромобилях используются более крупные двигатели BLDC мощностью примерно до 100 кВт. Они также находят применение в электрических моделях самолетов .
Коммутируемый реактивный двигатель
[ редактировать ]
Вентиляционный реактивный двигатель (SRM) не имеет щеток и постоянных магнитов, а в роторе нет электрического тока. Крутящий момент возникает из-за небольшого несоосности полюсов ротора и полюсов статора. Ротор выравнивается с магнитным полем статора, в то время как на обмотки возбуждения статора последовательно подается питание для вращения поля статора.
Магнитный поток, создаваемый обмотками возбуждения, следует по пути наименьшего магнитного поля, направляя поток через полюса ротора, которые находятся ближе всего к полюсам статора, находящимся под напряжением, тем самым намагничивая эти полюса ротора и создавая крутящий момент. Когда ротор вращается, на различные обмотки подается напряжение, поддерживающее вращение ротора.
SRM используются в некоторых приборах. [ 78 ] и транспортные средства. [ 79 ]
Универсальный двигатель переменного/постоянного тока
[ редактировать ]
Коммутируемый двигатель с электрическим возбуждением, последовательной или параллельной обмоткой называется универсальным двигателем, поскольку он может быть спроектирован для работы как от переменного, так и от постоянного тока. Универсальный двигатель может хорошо работать от переменного тока, поскольку ток как в обмотках возбуждения, так и в катушках якоря (и, следовательно, в результирующих магнитных полях) синхронно меняет полярность, и, следовательно, результирующая механическая сила возникает в постоянном направлении вращения.
Работая на обычных частотах электросети , универсальные двигатели часто используются в устройствах мощностью менее киловатта. Универсальные двигатели составили основу традиционного железнодорожного тягового двигателя электрических железных дорог . В этом приложении использование мощности переменного тока на двигателе, предназначенном для работы на постоянном токе, приведет к снижению эффективности из-за нагрева вихревыми токами их магнитных компонентов, особенно полюсных наконечников двигателя, в которых для постоянного тока использовались бы твердые (неламинированные) железо. Сейчас они используются редко.
Преимущество состоит в том, что мощность переменного тока может использоваться в двигателях, которые имеют высокий пусковой момент и компактную конструкцию, если используются высокие рабочие скорости. Напротив, затраты на техническое обслуживание выше, а срок службы сокращается. Такие двигатели используются в устройствах, которые не используются интенсивно и имеют высокие требования к пусковому моменту. Множественные нажатия на катушку возбуждения обеспечивают (неточное) ступенчатое управление скоростью. Бытовые блендеры, в которых заявлено множество скоростей, обычно сочетают в себе катушку возбуждения с несколькими отводами и диод, который можно вставить последовательно с двигателем (заставляя двигатель работать от полуволнового выпрямленного переменного тока). Универсальные двигатели также поддаются электронному контролю скорости и поэтому являются выбором для таких устройств, как бытовые стиральные машины. Двигатель может вращать барабан (как вперед, так и назад), переключая обмотку возбуждения относительно якоря.
В то время как SCIM не может вращать вал быстрее, чем позволяет частота сети, универсальные двигатели могут работать на гораздо более высоких скоростях. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где желательны высокая скорость и легкий вес. Они также широко используются в портативных электроинструментах, таких как дрели, шлифовальные машины, циркулярные пилы и лобзики, где характеристики двигателя работают хорошо. Частота вращения двигателей многих пылесосов и триммеров превышает 10 000 об/мин , а у миниатюрных измельчителей – 30 000 об/мин .
Машина переменного тока с внешней коммутацией
[ редактировать ]Асинхронные и синхронные двигатели переменного тока оптимизированы для работы с однофазной или многофазной синусоидальной или квазисинусоидальной формой сигнала, например, подаваемой для приложений с фиксированной скоростью от сети переменного тока или для приложений с регулируемой скоростью от контроллеров частотно-регулируемого привода (ЧРП). .
Асинхронный двигатель
[ редактировать ]Асинхронный двигатель — это асинхронный двигатель переменного тока, в котором мощность передается на ротор посредством электромагнитной индукции, подобно действию трансформатора. Асинхронный двигатель напоминает вращающийся трансформатор, поскольку статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор (вращающаяся часть) — вторичной стороной. Многофазные асинхронные двигатели широко используются в промышленности.

Клетка и фазный ротор
[ редактировать ]Асинхронные двигатели можно разделить на асинхронные двигатели с короткозамкнутым ротором (SCIM) и асинхронные двигатели с фазным ротором (WRIM). SCIM имеют тяжелую обмотку, состоящую из сплошных стержней, обычно из алюминия или меди, электрически соединенных кольцами на концах ротора. Брусья и кольца в целом очень похожи на вращающуюся клетку для упражнений животного .
Токи, индуцированные в этой обмотке, создают магнитное поле ротора. Форма стержней ротора определяет скоростные характеристики. На низких скоростях ток, индуцируемый в «беличьей клетке», имеет почти сетевую частоту и имеет тенденцию оставаться во внешних частях клетки. По мере ускорения двигателя частота скольжения становится ниже, и больший ток достигает внутренней части. Придавая стержням форму, позволяющую изменять сопротивление частей обмотки во внутренней и внешней частях клетки, в цепь ротора эффективно вводится переменное сопротивление. Однако в большинстве таких двигателей используются одинаковые стержни.
В WRIM обмотка ротора состоит из множества витков изолированного провода и соединена с контактными кольцами на валу двигателя. В цепь ротора можно подключить внешний резистор или другое устройство управления. Резисторы позволяют контролировать скорость двигателя, хотя и рассеивают значительную мощность. Преобразователь может питаться от цепи ротора и возвращать мощность скольжения, которая в противном случае была бы потрачена впустую, в энергосистему через инвертор или отдельный двигатель-генератор.
WRIM используются в основном для запуска высокоинерционной нагрузки или нагрузки, требующей высокого пускового момента во всем диапазоне скоростей. При правильном выборе резисторов, используемых во вторичном сопротивлении или пускателе с контактными кольцами, двигатель способен развивать максимальный крутящий момент при относительно низком токе питания от нулевой скорости до полной скорости.
Скорость двигателя можно изменить, поскольку кривая крутящего момента двигателя эффективно изменяется за счет величины сопротивления, подключенного к цепи ротора. Увеличение сопротивления снижает скорость максимального крутящего момента. Если сопротивление увеличивается за пределы точки, в которой максимальный крутящий момент возникает при нулевой скорости, крутящий момент еще больше уменьшается.
При использовании нагрузки, кривая крутящего момента которой увеличивается с ростом скорости, двигатель работает на скорости, при которой крутящий момент, развиваемый двигателем, равен крутящему моменту нагрузки. Уменьшение нагрузки приводит к увеличению скорости двигателя, тогда как увеличение нагрузки приводит к замедлению двигателя до тех пор, пока нагрузка и крутящий момент двигателя снова не станут равными. При таком режиме потери на скольжение рассеиваются во вторичных резисторах и могут быть значительными. Регулирование скорости и чистая эффективность плохие.
Моментный двигатель
[ редактировать ]Моментный двигатель может работать неопределенно долго в остановленном состоянии, то есть с блокировкой вращения ротора, не вызывая повреждений. В этом режиме работы двигатель прилагает к нагрузке постоянный крутящий момент.
Обычное применение - двигатели подающей и приемной бобины в ленточном накопителе. В этом приложении, приводимом в действие низким напряжением, характеристики этих двигателей обеспечивают постоянное легкое натяжение ленты независимо от того, ведущий протягивает ли ленту мимо ленточных головок или нет. Приводимые в движение от более высокого напряжения (обеспечивающий более высокий крутящий момент), моментные двигатели могут выполнять ускоренную перемотку вперед и назад, не требуя дополнительных механических устройств, таких как шестерни или сцепления. В мире компьютерных игр моментные двигатели используются в рулевых колесах с силовой обратной связью.
Другое распространенное применение — управление дроссельной заслонкой двигателя внутреннего сгорания с помощью электронного регулятора. Двигатель работает против возвратной пружины, перемещая дроссельную заслонку в соответствии с выходным сигналом регулятора. Последний контролирует обороты двигателя, считая электрические импульсы от системы зажигания или от магнитного датчика и в зависимости от оборотов вносит небольшие корректировки в величину тока. Если двигатель замедляется относительно желаемой скорости, ток увеличивается, создавая больший крутящий момент, натягивая возвратную пружину и открывая дроссельную заслонку. Если двигатель работает слишком быстро, регулятор уменьшает ток, позволяя возвратной пружине отступить и уменьшить дроссельную заслонку.
Синхронный двигатель
[ редактировать ]Синхронный электродвигатель представляет собой двигатель переменного тока. Он включает в себя ротор, вращающийся с катушками, пропускающими магниты с той же частотой, что и переменный ток, и создающий магнитное поле для его приведения в действие. Он имеет нулевое скольжение в типичных условиях эксплуатации. Напротив, асинхронные двигатели должны проскальзывать, чтобы создавать крутящий момент. Один тип синхронного двигателя похож на асинхронный двигатель, за исключением того, что ротор возбуждается полем постоянного тока. Контактные кольца и щетки проводят ток к ротору. Полюса ротора соединяются друг с другом и движутся с одинаковой скоростью. Другой тип, предназначенный для низкого крутящего момента нагрузки, имеет плоские поверхности, притертые к обычному короткозамкнутому ротору для создания дискретных полюсов. Еще один, сделанный Хаммондом для часов до Второй мировой войны и для старых органов Хаммонда , не имеет роторных обмоток и отдельных полюсов. Это не самозапуск. Часы требуют ручного запуска с помощью небольшой ручки на задней панели, в то время как более старые органы Hammond имели вспомогательный пусковой двигатель, подключенный к подпружиненному ручному переключателю.
Гистерезисные синхронные двигатели обычно представляют собой (по сути) двухфазные двигатели с фазосдвигающим конденсатором для одной фазы. Они запускаются как асинхронные двигатели, но когда скорость скольжения значительно снижается, ротор (гладкий цилиндр) временно намагничивается. Благодаря распределенным полюсам он действует как синхронный двигатель с постоянными магнитами. Материал ротора, как и материал обычного гвоздя, остается намагниченным, но его можно без труда размагнитить. Во время работы полюса ротора остаются на месте; они не дрейфуют.
Синхронные двигатели малой мощности (например, для традиционных электрических часов) могут иметь многополюсные внешние чашечные роторы с постоянными магнитами и использовать экранирующие катушки для обеспечения пускового крутящего момента. Часовые двигатели Telechron имеют заштрихованные полюса для пускового крутящего момента и двухспицевый кольцевой ротор, который работает как дискретный двухполюсный ротор.
Электрическая машина с двойной подачей
[ редактировать ]Электродвигатели с двойным питанием имеют два независимых набора многофазных обмоток, которые вносят активную (то есть рабочую) мощность в процесс преобразования энергии, при этом по крайней мере один из наборов обмоток имеет электронное управление для работы с регулируемой скоростью. Два независимых многофазных набора обмоток (т.е. двойной якорь) — это максимум, предусмотренный в одном корпусе без дублирования топологии. Электродвигатели с двойным питанием имеют эффективный диапазон скоростей с постоянным крутящим моментом, который в два раза превышает синхронную скорость для заданной частоты возбуждения. Это в два раза превышает диапазон скоростей с постоянным крутящим моментом по сравнению с электрическими машинами с одинарным питанием , которые имеют только один комплект активных обмоток.
Двигатель с двойным питанием позволяет использовать электронный преобразователь меньшего размера, но стоимость обмотки ротора и контактных колец может свести на нет экономию на компонентах силовой электроники. Трудности касаются контроля скорости вблизи приложений с синхронным ограничением скорости. [ 80 ]
Расширенные типы
[ редактировать ]Роторный
[ редактировать ]Двигатель с ротором без сердечника или без сердечника
[ редактировать ]
Двигатель постоянного тока без сердечника или без железа представляет собой специализированный двигатель постоянного тока с постоянными магнитами. [ 75 ] оптимизирован для быстрого ускорения Ротор и не имеет железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, состоящей только из проволоки и связующего материала. Ротор может поместиться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь магнитного потока статора. Вторая конструкция имеет корзину обмотки ротора, окружающую магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом двигателя и обеспечивает путь возврата потока.
Поскольку ротор имеет гораздо меньшую массу, чем обычный ротор, он может ускоряться гораздо быстрее, часто достигая механической постоянной времени менее одной миллисекунды. Это особенно верно, если в обмотках используется алюминий, а не (более тяжелая) медь. Ротор не имеет металлической массы, которая могла бы выступать в качестве теплоотвода; даже небольшие двигатели необходимо охлаждать. Перегрев может стать проблемой для этих конструкций.
Вибрационный сигнал сотовых телефонов может генерироваться цилиндрическими двигателями с постоянными магнитами или дискообразными двигателями с тонким многополярным дисковым полевым магнитом и намеренно несбалансированной конструкцией ротора из формованного пластика с двумя связанными катушками без сердечника. Металлические щетки и плоский коммутатор передают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и имеют связанную катушку, расположенную между полюсами тонких постоянных магнитов с высоким магнитным потоком. Это быстрые позиционеры головок для жестких дисков («жестких дисков»). Хотя современная конструкция значительно отличается от конструкции громкоговорителей, ее до сих пор условно (и неправильно) называют структурой «звуковой катушки», поскольку головки некоторых более ранних жестких дисков двигались по прямым линиям и имели структуру привода, очень похожую на это громкоговоритель.
Двигатель с блинным или осевым ротором
[ редактировать ]Печатный якорь или двигатель-блинчик имеет обмотки в форме диска, расположенные между массивами магнитов с высоким магнитным потоком. Магниты расположены по кругу, обращенному к ротору, и расположены на расстоянии, образующем осевой воздушный зазор. [ 81 ] Эта конструкция широко известна как блинный двигатель из-за ее плоского профиля.
Якорь (первоначально созданный на печатной плате) изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитов, образуя тонкий жесткий диск. Якорь не имеет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию компактной.
Альтернативная конструкция заключается в использовании намотанной медной проволоки, уложенной плоско с центральным обычным коммутатором в форме цветка и лепестка. Обмотки обычно стабилизируются с помощью систем электрической заливки эпоксидной смолой. Это наполненные эпоксидные смолы, которые имеют умеренную, смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низкой экзотермичностью и обычно соответствуют стандарту UL 1446 как герметизирующий состав с изоляцией, рассчитанной на температуру 180 °C (356 °F), класс H.
Уникальным преимуществом двигателей постоянного тока без сердечника является отсутствие зубцов (изменений крутящего момента, вызванных изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью лишен железа, хотя железные роторы ламинированы. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую скорость переключения (> 40 кГц) или постоянный ток из-за снижения электромагнитной индукции .
Эти двигатели были изобретены для привода ведущего вала приводов на магнитной ленте, где минимальное время достижения рабочей скорости и минимальный тормозной путь были критическими. Двигатели Pancake широко используются в высокопроизводительных сервоуправляемых системах, робототехнических системах, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию доступных сейчас конструкций, эта технология используется в различных применениях: от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, расположенного между двумя роторами. Одна из таких конструкций обеспечивала пиковую мощность 15 кВт/кг и устойчивую мощность около 7,5 кВт/кг. Этот двигатель с осевым магнитным потоком без ярма обеспечивает более короткий путь магнитного потока, удерживая магниты дальше от оси. Конструкция допускает нулевой вылет обмотки; 100 процентов обмоток активны. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели могут быть сложены для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора воздействуют на диск статора равными и противоположными силами. Роторы соединены напрямую друг с другом через кольцо вала, компенсируя магнитные силы. [ 82 ]
Серводвигатель
[ редактировать ]Серводвигатель — это двигатель, который используется в системе обратной связи управления положением или скоростью. Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь предсказуемые характеристики по скорости, крутящему моменту и мощности. Кривая скорость/крутящий момент важна и имеет высокое соотношение для серводвигателя. Важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают производительность. Большие, мощные, но медленно реагирующие сервоконтуры могут использовать обычные двигатели переменного или постоянного тока и системы привода с обратной связью по положению или скорости. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходная плотность мощности и характеристики ускорения двигателей переменного тока имеют тенденцию отдавать предпочтение подходам синхронного привода с постоянными магнитами, BLDC, индукции и SRM. [ 81 ]
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению является постоянной во время работы двигателя. Шаговая система по своей сути работает с разомкнутым контуром, полагаясь на то, что двигатель не «пропускает шаги» для кратковременной точности, с любой обратной связью, такой как «исходный» переключатель или энкодер положения, внешний по отношению к системе двигателя. [ 83 ]
Шаговый двигатель
[ редактировать ]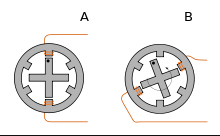
Шаговые двигатели обычно используются для обеспечения точного вращения. Внутренний ротор, содержащий постоянные магниты, или магнитомягкий ротор с явновыраженными полюсами управляется набором внешних магнитов с электронным управлением. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается напряжение, ротор выравнивается по магнитному полю, создаваемому обмоткой возбуждения, находящейся под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он движется поэтапно — начиная и затем останавливаясь — переходя из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также менять направление, останавливаться, ускоряться или замедляться в любой момент.
Простые драйверы шаговых двигателей полностью подают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубцу» в ограниченном количестве положений. Микрошаговые драйверы могут пропорционально контролировать мощность, подаваемую на обмотки возбуждения, позволяя роторам располагаться между зубчатыми точками и плавно вращаться. Шаговые двигатели с компьютерным управлением являются одной из наиболее универсальных систем позиционирования, особенно как часть цифровой системы сервоуправления .
Шаговые двигатели можно легко поворачивать на определенный угол дискретными шагами, и, следовательно, шаговые двигатели использовались для позиционирования головок чтения/записи в ранних дисководах , где точность и скорость, которые они предлагали, могли правильно позиционировать головку чтения/записи. По мере увеличения плотности дисков ограничения точности и скорости сделали их устаревшими для жестких дисков - ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными - поэтому в новых жестких дисках используются системы привода головки на основе звуковой катушки. конического типа (Термин «звуковая катушка» в этом отношении является историческим; он относится к конструкции громкоговорителя .)
Шаговые двигатели часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения активного элемента, каретки печатающей головки ( струйные принтеры ), а также валика или подающих роликов.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; у них одна катушка, они потребляют мало энергии и имеют ротор с постоянным магнитом. Тот же тип двигателя приводит в движение кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы , содержат более одного шагового двигателя.
Тесно связанные по конструкции с синхронными двигателями трехфазного переменного тока, шаговые двигатели и SRM классифицируются как двигатели с переменным сопротивлением. [ 84 ]
Линейный
[ редактировать ]Линейный двигатель — это, по сути, любой электродвигатель, который был «развернут» так, что вместо создания крутящего момента (вращения) он создавал прямолинейную силу по своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно используются в американских горках, где быстрое движение безмоторного вагона контролируется рельсом. Их также используют в поездах на магнитной подвеске , где поезд «летит» над землей. В меньшем масштабе перьевой плоттер HP 7225A 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y. [ 85 ]
Немагнитный
[ редактировать ]Электростатический
[ редактировать ]Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели представляют собой двойную версию обычных двигателей с катушкой. Обычно им требуется источник питания высокого напряжения, хотя в небольших двигателях используется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют большого тока при низких напряжениях. В 1750-х годах первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном. Электростатические двигатели часто используются в микроэлектромеханических системах ( МЭМС ), где напряжение их привода ниже 100 В и где движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращательных электростатических двигателях. [ нужна ссылка ]
Пьезоэлектрический
[ редактировать ]Пьезоэлектрический двигатель или пьезодвигатель — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при электрического поля приложении . В пьезоэлектрических двигателях используется обратный пьезоэлектрический эффект, при котором материал создает акустические или ультразвуковые колебания для создания линейного или вращательного движения. [ 86 ] В одном механизме удлинение в одной плоскости используется для выполнения серии растягиваний и удержаний положения, подобно тому, как движется гусеница. [ 87 ]
Электрическая двигательная установка
[ редактировать ]Двигательная система космического корабля с электрическим приводом использует технологию электродвигателей для движения космического корабля в космическом пространстве. Большинство систем основаны на электрическом ускорении топлива до высокой скорости, тогда как некоторые системы основаны на электродинамических привязей принципах к магнитосфере . [ 88 ]
Сравнение по основным категориям
[ редактировать ]| Тип | Преимущества | Недостатки | Типичное применение | Типичный привод, мощность |
|---|---|---|---|---|
| Самокоммутируемые двигатели | ||||
| Матовый DC | Простое управление скоростью
Низкая первоначальная стоимость |
Уход (щетки)
Средняя продолжительность жизни Дорогой коллектор и щетки. |
Сталелитейные заводы
Машины для производства бумаги Беговые тренажеры Автомобильные аксессуары |
Выпрямитель, линейный транзистор(ы) или контроллер прерывателя постоянного тока. [ 89 ] |
| Бесщеточный двигатель постоянного тока (BLDC или BLDM) | Длительный срок службы
Низкие эксплуатационные расходы Высокая эффективность |
Более высокая первоначальная стоимость
Требуется контроллер EC с замкнутым контуром управления. |
Жесткие («жесткие») диски
CD/DVD-плееры Электромобили Радиоуправляемые автомобили БПЛА |
синхронный; однофазный или трехфазный с ротором ПМ и трапециевидной обмоткой статора; VFD обычно VS- инвертор типа PWM . [ 81 ] [ 90 ] [ 91 ] |
| Реактивный двигатель с переключателем (SRM) | Длительный срок службы
Низкие эксплуатационные расходы Высокая эффективность Никаких постоянных магнитов Бюджетный Простая конструкция |
Механический резонанс
возможный Высокие потери железа Невозможно: * Открытое или векторное управление * Параллельная работа Требуется ЕС-контроллер [ 84 ] |
Бытовая техника
Электромобили Текстильные фабрики Приложения для самолетов |
ШИМ и различные другие типы приводов, которые обычно используются в специализированных / OEM -приложениях. [ 92 ] [ 93 ] |
| Универсальный двигатель | Высокий пусковой момент, компактность, высокая скорость. | Уход (щетки)
Более короткий срок службы Обычно акустически шумный Только небольшие номиналы экономичны |
Ручные электроинструменты, блендеры, пылесосы, воздуходувки. | Регулируемый однофазный переменный ток, полуволновой или полноволновой контроль фазового угла с помощью симистора(ов); опциональное управление с обратной связью. [ 89 ] |
| Асинхронные двигатели переменного тока | ||||
| Многофазный переменный ток
клетка для белки или роторный ротор асинхронный двигатель (SCIM) или (ВРИМ) |
Самозапускающийся
Бюджетный Крепкий Надежный Номиналы до 1+ МВт Стандартизированные типы. |
Высокий пусковой ток
Низкая эффективность из-за необходимости для намагничивания. |
SCIM с фиксированной скоростью традиционно является рабочей лошадкой в мире, особенно в низкопроизводительных приложениях всех типов.
Регулируемые, традиционно малопроизводительные регулируемые насосы, вентиляторы, воздуходувки и компрессоры. Переменная скорость, все чаще другие высокопроизводительные нагрузки с постоянным крутящим моментом и постоянной мощностью или динамические нагрузки. |
Низкопроизводительные приложения всех типов с фиксированной скоростью.
Традиционно это приводы WRIM с регулируемой скоростью или преобразователи частоты с фиксированной скоростью, управляемые напряжением/Гц. Частотные преобразователи с регулируемой скоростью и векторным управлением заменяют приводы постоянного тока, WRIM и однофазные асинхронные двигатели переменного тока. |
| И СКИМ
расщепленная фаза конденсаторный старт |
Высокая мощность
высокий пусковой момент |
Скорость чуть ниже синхронной
Требуется пусковой переключатель или реле |
Бытовая техника
Стационарные электроинструменты |
Фиксированный или регулируемый однофазный переменный ток, переменная скорость которого обычно достигается за счет полноволнового управления фазовым углом с помощью симистора(ов); опциональное управление с обратной связью. [ 89 ] |
| И СКИМ
расщепленная фаза работа от конденсатора |
Умеренная мощность
Высокий пусковой момент Нет пускового переключателя Сравнительно долгий срок службы |
Скорость чуть ниже синхронной
Немного дороже |
Промышленные воздуходувки
Промышленное оборудование | |
| И СКИМ
расщепленная фаза, вспомогательный начать наматывать |
Умеренная мощность
Низкий пусковой момент |
Скорость чуть ниже синхронной
Требуется пусковой переключатель или реле |
Бытовая техника
Стационарные электроинструменты | |
| Индукционный переменный ток с экранированным полюсом
мотор |
Бюджетный
Долгая жизнь |
Скорость чуть ниже синхронной
Низкий пусковой момент Маленькие рейтинги низкая эффективность |
Вентиляторы, бытовая техника, проигрыватели пластинок | |
| Синхронные двигатели переменного тока | ||||
| Синхронный двигатель с фазным ротором (WRSM) | Синхронная скорость
По своей сути более эффективный асинхронный двигатель, низкий коэффициент мощности |
Более дорогостоящий | Промышленные двигатели | Фиксированная или переменная скорость, трехфазный; VFD обычно шестиступенчатый CS инвертор VS PWM. с коммутацией нагрузки или инвертор [ 89 ] [ 91 ] |
| Гистерезисный двигатель | Точный контроль скорости
Низкий уровень шума Нет вибрации Высокий старт крутящий момент |
Очень низкая эффективность | Часы, таймеры, звукопроизводящее или записывающее оборудование, жесткий диск, шпилевой привод. | Однофазный переменный ток, двухфазный двигатель с конденсаторным пуском, конденсаторный двигатель [ 94 ] [ 95 ] |
| Синхронный реактивный двигатель (СиРМ) | Эквивалент SCIM
за исключением того, что он более прочный, более эффективный, работает меньше, занимает меньше места Конкурирует с синхронным двигателем с постоянными магнитами без проблем с размагничиванием. |
Требуется контроллер
Не широко доступен Высокая стоимость |
Бытовая техника
Электромобили Текстильные фабрики Приложения для самолетов |
VFD может быть стандартного типа DTC или VS инвертора PWM. типа [ 96 ] |
| Специальные двигатели | ||||
| Двигатели с блинным или осевым ротором [ 81 ] | Компактный дизайн
Простое управление скоростью |
Средняя стоимость
Средняя продолжительность жизни |
Офисное оборудование
Вентиляторы/Насосы, быстрые промышленные и военные сервоприводы |
Приводы обычно могут быть щеточными или бесщеточными постоянного тока. [ 81 ] |
| Шаговый двигатель | Точное позиционирование
Высокий удерживающий момент |
Некоторые из них могут быть дорогостоящими
Требуется контроллер |
Размещение в принтерах и дисководах; промышленные станки | Это не ВФД. Положение шагового двигателя определяется путем подсчета импульсов. [ 97 ] [ 98 ] |
Принципы работы
[ редактировать ]Сила и крутящий момент
[ редактировать ]Электродвигатель преобразует электрическую энергию в механическую энергию посредством силы между двумя противоположными магнитными полями. По крайней мере одно из двух магнитных полей должно быть создано электромагнитом посредством магнитного поля, вызванного электрическим током.
Сила между током в проводнике длиной перпендикулярно магнитному полю можно рассчитать, используя закон силы Лоренца :




Примечание. X обозначает векторное векторное произведение .
В наиболее общих подходах к расчету сил в двигателях используется тензорная запись. [ 99 ]
Власть
[ редактировать ]Выходная мощность электродвигателя определяется как где:

- вала : угловая скорость , [радиан в секунду]
- : крутящий момент, [Ньютон-метры]
- : сила, [Ньютоны]
- : скорость, [метры в секунду].




В британских единицах измерения выходная механическая мощность двигателя определяется выражением: [ 100 ]
- (лошадиные силы)

где:
- , угловая скорость вала [ об/мин ]
- : крутящий момент, [фут-фунт].

В асинхронном или асинхронном двигателе соотношение [ нужна ссылка ] между скоростью двигателя и мощностью воздушного зазора [ нужны разъяснения ] дается следующим:
- , где
- R r – сопротивление ротора
- я р 2 – квадрат тока, наведенного в роторе
- s – скольжение двигателя [ нужны разъяснения ] ; т.е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.

Обратная ЭДС
[ редактировать ]Движение обмоток якоря двигателя постоянного тока или универсального двигателя посредством магнитного поля наводит в них напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется « обратной электродвижущей силой (ЭДС) ». Напряжение пропорционально скорости вращения двигателя. Противо-ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; В результате снижается обратная ЭДС, и из источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки нагрузки. [ 101 ]
В машинах переменного тока иногда полезно учитывать источник обратной ЭДС внутри машины; это вызывает особую озабоченность при точном регулировании скорости асинхронных двигателей с ЧРП. [ 101 ]
Потери
[ редактировать ]Потери двигателя происходят главным образом из-за резистивных потерь в обмотках, потерь в сердечнике и механических потерь в подшипниках, а также возникают аэродинамические потери, особенно при наличии охлаждающих вентиляторов.
Потери возникают также при коммутации, механические коммутаторы искрят; электронные коммутаторы, а также рассеивают тепло.
Эффективность
[ редактировать ]Для расчета эффективности двигателя механическая выходная мощность делится на входную электрическую мощность:
- ,

где - эффективность преобразования энергии , - электрическая входная мощность, а механическая выходная мощность:





где входное напряжение, входной ток, выходной крутящий момент, а — выходная угловая скорость. Точку максимальной эффективности можно вывести аналитически. Обычно он составляет менее 1/2 крутящего момента срыва . [ нужна ссылка ]

Различные национальные регулирующие органы приняли законы, поощряющие производство и использование двигателей с более высоким КПД. КПД электродвигателей варьируется от 15% до 20% для двигателей с экранированными полюсами, до 98% для двигателей с постоянными магнитами. [ 102 ] [ 103 ] [ 104 ] при этом эффективность также зависит от нагрузки. Пиковый КПД обычно составляет 75% от номинальной нагрузки. Так (как пример) мотор мощностью 10 л.с. наиболее эффективен при движении груза, требующего мощности 7,5 л.с. [ 105 ] Эффективность также зависит от размера двигателя; более крупные двигатели, как правило, более эффективны. [ 106 ] Некоторые двигатели не могут работать непрерывно более определенного периода времени (например, более часа за один цикл). [ 107 ]
Фактор добра
[ редактировать ]Эрик Лейтуэйт [ 108 ] предложил показатель для определения «качественности» электродвигателя: [ 109 ]

Где:
- — коэффициент добротности (факторы выше 1, скорее всего, будут эффективными)
- – площади поперечного сечения магнитной и электрической цепи
- длины магнитной и электрической цепей
- это проницаемость ядра
- угловая частота, с которой вращается двигатель




Исходя из этого, он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса. Однако уравнение напрямую относится только к двигателям без ПМ.
Параметры производительности
[ редактировать ]Крутящий момент
[ редактировать ]В этом разделе основное внимание уделяется только одному специализированному аспекту предмета . ( март 2012 г. ) |
Электромагнитные двигатели получают крутящий момент за счет векторного произведения взаимодействующих полей. Расчет крутящего момента требует знания полей в воздушном зазоре. Как только они установлены, крутящий момент представляет собой интеграл всех векторов силы, умноженный на радиус вектора. Ток, текущий в обмотке, создает поля. Для двигателя, использующего магнитный материал, поле не пропорционально току.
Показатель, связывающий ток с крутящим моментом, может помочь при выборе двигателя. Максимальный крутящий момент двигателя зависит от максимального тока, без учета тепловых соображений.
При оптимальной конструкции с заданным ограничением насыщения сердечника и заданным активным током (т. е. крутящим током), напряжением, числом пар полюсов, частотой возбуждения (т. е. синхронной скоростью) и плотностью потока в воздушном зазоре все категории электродвигателей Генераторы / генераторы демонстрируют практически одинаковый максимальный непрерывный крутящий момент на валу (т. е. рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной подкладки, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуется увеличение крутящего момента сверх максимального, например, для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к превышению максимального крутящего момента существенно различается в зависимости от типа двигателя/генератора.
Электрические машины без топологии трансформаторной схемы, такие как WRSM или PMSM, не могут обеспечить скачки крутящего момента без насыщения магнитного сердечника. В этот момент дополнительный ток не может увеличить крутящий момент. Более того, сборка постоянных магнитов СДСМ может быть необратимо повреждена.
Электрические машины с топологией трансформаторной схемы, такие как асинхронные машины, индукционные электрические машины с двойным питанием, а также машины с асинхронным или синхронным ротором с двойным питанием (WRDF), допускают скачки крутящего момента, поскольку активный ток, индуцированный ЭДС, по обе стороны от Трансформаторы противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника, связанного с трансформатором, избегая насыщения сердечника.
Электрические машины, работающие на индукционном или асинхронном принципах, замыкают накоротко один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т. е. реального) тока. Реализуемы скачки крутящего момента в два-три раза превышающие максимальный расчетный.
Бесщеточная синхронная машина с двойным питанием и фазным ротором (BWRSDF) является единственной электрической машиной с действительно двухпортовой топологией трансформаторной схемы (т. е. оба порта независимо возбуждаются без короткозамкнутого порта). [ 110 ] Топология схемы двухпортового трансформатора, как известно, нестабильна и требует многофазного узла контактных колец и щеток для передачи ограниченной мощности на набор обмоток ротора. Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжения для синхронной работы во время работы, одновременно обеспечивая бесщеточную мощность комплекта обмотки ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и всплесков напряжения. крутящий момент, значительно превышающий максимальный рабочий крутящий момент, и далеко превосходящий практические возможности любого другого типа электрической машины. Были рассчитаны скачки крутящего момента, превышающие рабочий крутящий момент более чем в восемь раз.
Постоянная плотность крутящего момента
[ редактировать ]Плотность непрерывного крутящего момента обычных электрических машин определяется размером площади воздушного зазора и глубиной заднего железа, которые определяются номинальной мощностью набора обмоток якоря, скоростью машины и достижимым воздушным сопротивлением. плотность потока в зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самарий -кобальтовых постоянных магнитов, постоянная плотность крутящего момента практически одинакова среди электрических машин с оптимально спроектированными наборами обмоток якоря. Плотность непрерывного крутящего момента зависит от способа охлаждения и допустимого периода эксплуатации до разрушения из-за перегрева обмоток или повреждения постоянных магнитов.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее: [ 111 ]
| Тип электрической машины | Удельная плотность крутящего момента (Нм/кг) |
|---|---|
| SPM – бесщеточный переменный ток, проводимость тока 180° | 1.0 |
| SPM – бесщеточный переменный ток, проводимость тока 120° | 0.9–1.15 |
| ИМ, асинхронная машина | 0.7–1.0 |
| IPM, машина с внутренними постоянными магнитами | 0.6–0.8 |
| VRM, машина с вдвойне заметным сопротивлением | 0.7–1.0 |
где – удельная плотность крутящего момента нормирована на 1,0 для поверхностного постоянного магнита (СПМ) – бесщеточный переменный ток, проводимость тока 180°.
Плотность крутящего момента примерно в четыре раза выше для двигателей с жидкостным охлаждением по сравнению с двигателями с воздушным охлаждением.
Источник, сравнивающий двигатели постоянного тока, асинхронные двигатели (IM), PMSM и SRM, показал: [ 112 ]
| Характеристика | округ Колумбия | В | ПМСМ | СРМ |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3.5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3.5 |
Другой источник отмечает, что СДСМ мощностью до 1 МВт имеют значительно большую плотность крутящего момента, чем асинхронные машины. [ 113 ]
Непрерывная плотность мощности
[ редактировать ]Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента и диапазона скорости постоянного крутящего момента. Электродвигатели могут достигать плотности до 20 кВт/кг, что означает выходную мощность 20 киловатт на килограмм. [ 114 ]
Акустический шум и вибрации
[ редактировать ]Акустический шум и вибрации обычно классифицируют по трем источникам:
- механические источники (например, из-за подшипников )
- аэродинамические источники (например, из-за установленных на валу вентиляторов )
- магнитные источники (например, из-за магнитных сил, таких как силы Максвелла , и сил магнитострикции, действующих на конструкции статора и ротора)
Последний источник, который может быть ответственным за «воющий шум» электродвигателей, называется электромагнитно-индуцированным акустическим шумом .
Стандарты
[ редактировать ]Ниже приведены основные стандарты проектирования, производства и испытаний электродвигателей:
- Американский институт нефти : Асинхронные двигатели с короткозамкнутым ротором API 541 — 375 кВт (500 лошадиных сил) и больше
- Американский институт нефти : Бесщеточные синхронные машины API 546 – 500 кВА и выше
- Американский институт нефти : API 547, асинхронные двигатели общего назначения с короткозамкнутым ротором – 250 л.с. и выше
- Институт инженеров по электротехнике и электронике : Стандартная процедура испытаний IEEE Std 112 для многофазных асинхронных двигателей и генераторов.
- Институт инженеров по электротехнике и электронике : Руководство IEEE Std 115 по процедурам испытаний синхронных машин
- Институт инженеров по электротехнике и электронике : Стандарт IEEE Std 841 для нефтяной и химической промышленности — повышенная эффективность, полностью закрытые асинхронные двигатели с короткозамкнутым ротором и вентиляторным охлаждением для тяжелых условий эксплуатации (TEFC) — до 370 кВт (500 л.с.) включительно
- Международная электротехническая комиссия : IEC 60034 Вращающиеся электрические машины.
- Международная электротехническая комиссия : IEC 60072 Размеры и серии мощности вращающихся электрических машин.
- Национальная ассоциация производителей электротехники : Двигатели и генераторы MG-1
- Лаборатории страховщиков : UL 1004 – Стандарт для электродвигателей.
- Индийский стандарт : IS:12615-2018 – Трехфазные двигатели переменного тока с сетевым управлением (КОД IE) «Классы эффективности и технические характеристики» (третья редакция)
См. также
[ редактировать ]- Компенсационная обмотка
- Электрический генератор
- Двигатель электромобиля
- Фактор добра
- Конденсатор двигателя
- Контроллер двигателя
- Поршневой электродвигатель
- Рекуперативный тормоз
- Тяговый двигатель
Примечания
[ редактировать ]- ↑ Ганот представляет собой превосходную иллюстрацию одного из таких ранних электродвигателей, разработанных Фроментом. [ 33 ]
- ^ Термин «электронный коллекторный двигатель» (ECM) отождествляется с отраслью отопления, вентиляции и кондиционирования воздуха (HVAC), причем различие между BLDC и BLAC в этом контексте рассматривается как функция степени сложности привода ECM с приводами BLDC. Обычно это простой однофазный выходной сигнал трапециевидной формы тока с однофазным скалярным управлением и регулированием напряжения, включающий конструкцию поверхностного двигателя с постоянными магнитами, а приводы BLAC имеют тенденцию к более сложной трехфазной синусоидальной форме тока с векторным управлением и регулированием тока, включающую внутреннюю конструкцию двигателя с постоянными магнитами. [ 71 ]
- ^ Универсальные и репульсные двигатели относятся к классу двигателей, известному как коллекторные двигатели переменного тока, который также включает в себя следующие в настоящее время в значительной степени устаревшие типы двигателей: однофазные - двигатели прямого и компенсированного последовательного действия, железнодорожные двигатели; трехфазные – различные типы репульсных двигателей, серийный двигатель с щеточным переключением, многофазный шунтовый двигатель с щеточным переключением или двигатель Шраге, двигатель Fynn-Weichsel. [ 73 ]
Ссылки
[ редактировать ]- ^ Фарадей, Майкл (1822). «О некоторых новых электромагнитных движениях и теории магнетизма» . Ежеквартальный журнал науки, литературы и искусства . XII . Королевский институт Великобритании: 74–96 (§IX) . Проверено 12 февраля 2013 г.
- ^ Том МакИналли, Шестой шотландский университет. Шотландские колледжи за рубежом: с 1575 по 1799 год (Брилл, Лейден, 2012), с. 115
- ^ Олег Д. Ефименко (1973). Электростатические двигатели, их история, типы и принципы работы , Научная фирма «Электрет». стр. 22–45
- ^ Гварниери, М. (2014). «Электричество в эпоху Просвещения». Журнал промышленной электроники IEEE . 8 (3): 60–63. дои : 10.1109/МИЭ.2014.2335431 . S2CID 34246664 .
- ^ Гварниери, М. (2014). «Большой прыжок с лягушачьей лапки». Журнал промышленной электроники IEEE . 8 (4): 59–61+69. дои : 10.1109/МИЭ.2014.2361237 . S2CID 39105914 .
- ^ Перейти обратно: а б с д Гварниери, М. (2018). «Вращающиеся и развивающиеся – ранние машины постоянного тока». Журнал промышленной электроники IEEE . 12 (3): 38–43. дои : 10.1109/МИЭ.2018.2856546 . HDL : 11577/3282911 . S2CID 52899118 .
- ^ Перейти обратно: а б «Рождение электрического движения» . Королевское учреждение . Проверено 19 июля 2022 г.
- ^ «Развитие электродвигателя» . Первые электродвигатели . Музей Искры. Архивировано из оригинала 6 марта 2013 года . Проверено 12 февраля 2013 г.
- ^ «Первое динамо?» . travelhungary.com. Архивировано из оригинала 20 июля 2013 года . Проверено 12 февраля 2013 г.
- ^ Перейти обратно: а б Гиймен, Амеде (1891). «Электричество и магнетизм » . пер., изд. и ред. с французского Сильвануса П. Томпсона. Macmillan and Co. Архивировано из оригинала 4 января 2018 г.
- ^ Хеллер, Август (апрель 1896 г.). «Анианус Джедлик» . Природа . 53 (1379). Норман Локьер: 516–517. Бибкод : 1896Природа..53..516H . дои : 10.1038/053516a0 .
- ^ Бландель, Стивен Дж. (2012). Магнетизм. Очень краткое введение . Издательство Оксфордского университета. п. 36. ISBN 978-0-19-960120-2 .
- ^ Тейн, М. «Электрические машины в автомобилях » (PDF) (на немецком языке). Архивировано из оригинала (PDF) 14 сентября 2013 года . Проверено 13 февраля 2013 г.
- ^ «Электрическая хронология» . Электрификация машин в XVIII и XIX веках - Небольшой словарь («Электрические машины в XVIII и XIX веках - небольшой тезаурус») (на немецком языке). Университет Регенсбурга . 2004. Архивировано из оригинала 9 июня 2011 года . Проверено 23 августа 2010 г.
- ^ «История аккумуляторов (в том числе)» . Электропедия. 9 июня 2010 года. Архивировано из оригинала 12 мая 2011 года . Проверено 23 августа 2010 г.
- ^ Перейти обратно: а б «Хронология аккумуляторных и энергетических технологий, технологий и приложений» . Архивировано из оригинала 2 марта 2013 года . Проверено 13 февраля 2013 г.
- ^ Ну и дела, Уильям (2004). «Стерджен, Уильям (1783–1850)». Оксфордский национальный биографический словарь . Оксфордский национальный биографический словарь (онлайн-изд.). Издательство Оксфордского университета. doi : 10.1093/ref:odnb/26748 . (Требуется подписка или членство в публичной библиотеке Великобритании .)
- ^ Варе, Этли Энн; Птачек, Грег (ноябрь 2001 г.). «Явная женщина: от АЗТ до телевизионных ужинов, истории женщин-изобретателей и их прорывных идей» . Хобокен, Нью-Джерси: John Wiley & Sons, Inc., с. 28. ISBN 978-0-471-02334-0 .
- ^ Гаррисон, Ерван Г. (1998). История техники и технологий: искусные методы (2-е изд.). ЦРК Пресс. ISBN 978-0-8493-9810-0 . Проверено 7 мая 2009 г.
- ^ Най, Дэвид Э. (1990). Электрификация Америки: социальные значения новой технологии . Массачусетский технологический институт Пресс. ISBN 978-0-262-64030-5 . Архивировано из оригинала 3 апреля 2013 г.
- ^ Рихтер, январь (7 февраля 2013 г.). «Мотор Якоби» . Электротехнические институты. Технологический институт Карлсруэ. Архивировано из оригинала 12 мая 2017 г. Проверено 14 мая 2017 г. >.
- ^ Томпсон, Сильванус П., изд. (1891). Электричество и магнетизм в переводе с французского Амеде Гиймен . Лондон: Макмиллан.
- ^ Хеллер, Август (апрель 1896 г.). «Анианус Джедлик» . Природа . 53 (1379). Норман Локьер: 516. Бибкод : 1896Natur..53..516H . дои : 10.1038/053516a0 . Проверено 23 августа 2010 г.
- ^ «Хронология технологий и приложений» . Электропедия. 28 мая 2010 года . Проверено 23 августа 2010 г.
- ^ Тейн, М. (22 марта 2009 г.). «Электрические машины в автомобилях » (PDF) (на немецком языке). Цвиккау: Торговля автотранспортными средствами. Архивировано из оригинала (PDF) 14 сентября 2013 года . Проверено 23 августа 2010 г.
- ^ «Электрическая хронология». Электрические машины и XIX веков – небольшой тезаурус ] XVIII (на немецком языке). Университет Регенсбурга . 31 марта 2004 года. Архивировано из оригинала 9 июня 2011 года . Проверено 23 августа 2010 г.
- ^ «История батареек (и прочего)» . Электропедия. 9 июня 2010 года . Проверено 23 августа 2010 г.
- ^ «Выставка по истории венгерской науки» . Архивировано из оригинала 26 августа 2013 года . Проверено 13 февраля 2013 г.
- ^ «Антонио Пачинотти» . Архивировано из оригинала 5 марта 2016 г.
- ^ «Энергетики: пар, электричество и люди, которые изобрели современную Америку» . Архивировано из оригинала 4 января 2018 г.
- ^ «Зенобе Теофиль Грамм» . Профиль Invent Now, Inc. в Зале славы . Архивировано из оригинала 1 ноября 2012 г. Проверено 19 сентября 2012 г.
- ^ Гано, Адольф (1881). Элементарный трактат по физике . Пер. и изд. с французского Э. Аткинсона (14-е изд.). Уильям Вуд и Ко, стр. 907–08 , сек. 899.
- ^ Гано, Адольф (1881). Элементарный трактат по физике . Пер. и изд. с французского Э. Аткинсона (14-е изд.). Уильям Вуд и Ко, стр. 907–08 , сек. 899.
- ^ «Фото традиционной формы мотора Сент-Луиса» . Архивировано из оригинала 11 апреля 2011 г.
- ^ «Покупка энергоэффективного электродвигателя – информационный бюллетень» (PDF) . USDoE. Архивировано (PDF) из оригинала 02 сентября 2011 г.
- ^ Бэббидж, К.; Гершель, JFW (январь 1825 г.). «Отчет о повторении экспериментов М. Араго по магнетизму, проявляемому различными веществами во время акта вращения» . Философские труды Королевского общества . 115 : 467–96. Бибкод : 1825RSPT..115..467B . дои : 10.1098/rstl.1825.0023 . Проверено 2 декабря 2012 г.
- ^ Томпсон , Сильванус Филлипс (1895). Многофазные электрические токи и двигатели переменного тока (1-е изд.). Лондон: E. & FN Spon. п. 261 . Проверено 2 декабря 2012 г.
- ^ Бейли, Уолтер (28 июня 1879 г.). «Способ создания вращения Араго» . Философский журнал . 3 (1). Тейлор и Фрэнсис: 115–120. Бибкод : 1879PPSL....3..115B . дои : 10.1088/1478-7814/3/1/318 . Архивировано из оригинала 1 декабря 2016 года.
- ^ Перейти обратно: а б Вучкович, Владан (ноябрь 2006 г.). «Интерпретация открытия» (PDF) . Сербский журнал инженеров-электриков . 3 (2). Архивировано (PDF) из оригинала 4 июля 2013 года . Проверено 10 февраля 2013 г.
- ^ Перейти обратно: а б Джоннес, Джилл (2004). Империи света: Эдисон, Тесла, Вестингауз и гонка за электрификацию мира . Случайный дом. п. 180. Архивировано из оригинала 01 декабря 2016 г.
- ^ Перейти обратно: а б с д Гварниери, М. (2018). «Развитие роторных машин переменного тока». Журнал промышленной электроники IEEE . 12 (4): 28–32. дои : 10.1109/МИЭ.2018.2874375 . hdl : 11577/3286584 . S2CID 56597952 .
- ^ Феррарис, Г. (1888). «Труды Королевской академии наук Турина». Труды Королевской академии наук Турина . XXIII : 360–75.
- ^ Материалы дела: Никола Тесла. «Двухфазный асинхронный двигатель» . Институт Франклина. Архивировано из оригинала 18 ноября 2012 года . Проверено 2 декабря 2012 г.
- ^ Перейти обратно: а б с д и Алжир, Польша; Арнольд з., RE (1976). «История асинхронных двигателей в Америке». Труды IEEE . 64 (9): 1380–83. дои : 10.1109/PROC.1976.10329 . S2CID 42191157 .
- ^ Клоостер, Джон В. (2009). Иконы изобретений: Создатели современного мира от Гутенберга до Гейтса . АБС-КЛИО, ООО. п. 305. ИСБН 978-0-313-34746-7 . Архивировано из оригинала 12 ноября 2012 года . Проверено 10 сентября 2012 г.
- ^ Дэй, Лэнс; Макнил, Ян, ред. (1996). Биографический словарь истории техники . Лондон: Рутледж. п. 1204. ИСБН 978-0-203-02829-2 . Проверено 2 декабря 2012 г.
- ^ Фрелих, Фриц Э.; Аллен Кент , ред. (1992). Энциклопедия телекоммуникаций Фрелиха/Кента . Том. 17 – Телевизионные технологии для подключения антенн. Нью-Йорк: Марсель Деккер. п. 36. ISBN 978-0-8247-2902-8 .
- ^ Маттокс, DM (2003). Основы технологии вакуумного нанесения покрытий . Случайный дом. п. 39. ИСБН 978-0-8155-1495-4 . Архивировано из оригинала 1 декабря 2016 г.
- ^ Хьюз, Томас Парк (1983). Сети власти: электрификация в западном обществе, 1880–1930 гг . Издательство Университета Джонса Хопкинса. п. 117. ИСБН 978-0-8018-2873-7 . Архивировано из оригинала 1 декабря 2016 г.
- ^ «Хронология Николы Теслы» . Общество Теслы США и Канады. Архивировано из оригинала 8 мая 2012 года . Проверено 5 июля 2012 г.
- ^ Хаббелл, М.В. (2011). Основы атомной энергетики. Вопросы и ответы . Авторхаус. п. 27. ISBN 978-1-4634-2441-1 .
- ^ «150-летие со дня рождения Михаэля фон Доливо-Добровольского» . Ассоциация электротехники, электроники и информационных технологий (на немецком языке). Январь 2012. Архивировано из оригинала 25 февраля 2013 года . Проверено 10 февраля 2013 г.
- ^ Доливо-Добровольский, М. (1891). "Переменный ток". ЭТЗ . 12 : 149, 161.
- ^ Густес-Пинто, Пауло (26 марта 2022 г.). «Этот двигатель с осевым магнитным потоком и статором на печатной плате созрел для электрифицированного мира» . IEEE-спектр . Проверено 26 апреля 2022 г.
- ^ Хьюз, Остин; Друри, Билл (2019). Электродвигатели и приводы: основы, типы и применение (5-е изд.). Оксфорд: Новизна. ISBN 978-0-08-102615-1 .
- ^ Скарпино, Мэтью (2015). Двигатели для производителей: Путеводитель по шаговым двигателям, сервоприводам и другим электрическим машинам . Que. ISBN 978-0-13-403132-3 . Раздел 1.2.2
- ^ «Постоянный магнит против асинхронных двигателей» . Турбомашинери Интернэшнл . США: MJH наук о жизни. 7 марта 2015 года . Проверено 8 ноября 2021 г.
- ^ «Двигатели в смоляном корпусе» . Корпорация Нидек .
- ^ Мортенсен, СХ; Беквит, С. §7-1 «Общее изображение синхронной машины» в гл. 7 – Генераторы и двигатели переменного тока . стр. 646–47, рис. 7–1 и 7–2. в Ноултоне, 1949 г.
- ^ Хамейер 2001 , с. 62.
- ^ Перейти обратно: а б «Как ременные передачи влияют на радиальную нагрузку» (PDF) . Корпорация Гейтс. 2017. Архивировано из оригинала (PDF) 22 февраля 2016 года . Проверено 28 июля 2017 г.
- ^ Ли, Норман К. (2006). Практическое руководство по выдувному формованию . Издательство iSmiters Rapra. п. 82. ИСБН 978-1-85957-513-0 .
- ^ Ким, Сан Хун (2017). Управление электродвигателями: двигатели постоянного, переменного тока и BLDC . Эльзевир. ISBN 97-80128123195 .
- ^ «Классификация электродвигателей» . ru.engineering-solutions.ru . Проверено 31 мая 2021 г.
- ^ «Насос с регулируемой скоростью, руководство по успешному применению, краткое изложение» (PDF) . USDOE – Europump – Институт гидравлики. Май 2004. с. 9, рис. ES–7. Архивировано из оригинала (PDF) 27 октября 2011 года . Проверено 19 февраля 2018 г.
- ^ Bose 2006 , стр. 328, 397, 481.
- ^ Найт, Энди. Электрические машины . Университет Альберты. Архивировано из оригинала 18 июля 2013 года . Проверено 20 февраля 2013 г.
- ^ Перейти обратно: а б Хамейер 2001 .
- ^ Перейти обратно: а б §1.3.1.1 Систематика двигателя в главе 1 – Введение . п. 5, таблица 1.1. в Штёлтинге, Калленбахе и Амрайне, 2008 г. , с. 5
- ^ Перейти обратно: а б с Ионел, DM (2010). «Высокоэффективные технологии привода электродвигателей с регулируемой скоростью для энергосбережения в жилищном секторе США». 12-я Международная конференция по оптимизации электрического и электронного оборудования (ОПТИМ) . IEEE. стр. 1403–14. дои : 10.1109/ОПТИМ.2010.5510481 . ISBN 978-1-4244-7019-8 .
- ^ Ионел, DM (2010). «Высокоэффективные технологии привода электродвигателей с регулируемой скоростью для энергосбережения в жилищном секторе США». 12-я Международная конференция по оптимизации электрического и электронного оборудования (ОПТИМ) . IEEE. стр. 1403–14. дои : 10.1109/ОПТИМ.2010.5510481 . ISBN 978-1-4244-7019-8 .
- ^ Алджер, Филип Л.; и др. §274–§287 подраздел «Коллекторные двигатели переменного тока» гл. 7 – Генераторы и двигатели переменного тока . стр. 755–63. в Ноултоне, 1949 год.
- ^ Алджер, Филип Л.; и др. §274–§287 подраздел «Коллекторные двигатели переменного тока» гл. 7 – Генераторы и двигатели переменного тока . стр. 755–63. в Ноултоне, 1949 год.
- ^ Кришнан, Р. (2008). Синхронные и бесщеточные приводы постоянного тока с постоянными магнитами . КПР. п. XVIII. ISBN 978-0-8247-5384-9 . Архивировано из оригинала 4 января 2018 г.
- ^ Перейти обратно: а б Веймантель, Х; Осингманн, П.; Мёкель, А. §2.1 Двигатели с коммутатором в главе 2 – Двигатели с непрерывным вращением . стр. 13–160. в Штёлтинге, Калленбахе и Амрайне, 2008 г. , с. 5
- ^ Лю, Чен-Чинг; и др. (1997). «§66.1 Генераторы». В Дорфе, Ричард К. (ред.). Справочник по электротехнике (3-е изд.). ЦРК Пресс. п. 1456. ИСБН 0-8493-8574-1 .
- ^ Нодзава, Тецуо (2009). «Университет Токай представляет двигатель постоянного тока мощностью 100 Вт с КПД 96%» . Tech-On – Nikkei Electronics. Архивировано из оригинала 1 января 2011 г.
- ^ Буш, Стив (2009). «Бесщеточная технология постоянного тока Dyson пылесосит со скоростью 104 000 об/мин» . Еженедельный журнал электроники. Архивировано из оригинала 11 апреля 2012 г.
- ^ «Мотор Tesla Model 3 — все, что я смог о нем узнать (Добро пожаловать в машину)» . ЧистаяТехника . 11 марта 2018 года . Проверено 18 июня 2018 г.
- ^ Ландер, Сирил В. (1993). «§9–8 «Управление асинхронным двигателем с контактными кольцами» в главе 9 «Управление машиной переменного тока». Силовая электроника (3-е изд.). МакГроу-Хилл 480 страниц. ISBN 0-07-707714-8 .
- ^ Перейти обратно: а б с д и Кришнан, Р. (март 1987 г.). «Критерии выбора сервоприводов». Транзакции IEEE для промышленных приложений . ИА-23 (2): 270–75. дои : 10.1109/TIA.1987.4504902 . S2CID 14777000 .
- ^ Блейн, Лоз (30 мая 2018 г.). «Magnax готовится к производству чрезвычайно мощного и компактного электродвигателя с осевым магнитным потоком» . newatlas.com . Проверено 18 июня 2018 г.
- ^ Патрик, Дейл Р.; Фардо, Стивен В. (1997). «Глава 11». Вращающиеся электрические машины и энергетические системы (2-е изд.). Fairmont Press, Inc. ISBN 978-0-88173-239-9 .
- ^ Перейти обратно: а б Бозе 2006 , стр. 569–70, 891.
- ^ Фенолио, Джон А.; Чин, Бесси У.К.; Кобб, Терри Р. (февраль 1979 г.). «Высококачественный цифровой XY-плоттер, обеспечивающий надежность, гибкость и низкую стоимость» (PDF) . Журнал Hewlett-Packard . Архивировано (PDF) из оригинала 27 марта 2012 года . Проверено 9 февраля 2012 года .
- ^ Хорн, Александр (2009). Сверхбыстрая метрология материалов . Джон Уайли и сыновья. ISBN 978-3-527-62793-6 .
- ^ Шафик, Амро; Бен Мрад, Рида (2016). «Технология пьезоэлектрических двигателей: обзор». Нанопозиционные технологии . Международное издательство Спрингер. п. 39. дои : 10.1007/978-3-319-23853-1_2 . ISBN 978-3-319-23853-1 .
- ^ «Привязи для помощи при запуске» . www.tethers.com . Архивировано из оригинала 16 ноября 2017 г. Проверено 15 сентября 2017 г.
- ^ Перейти обратно: а б с д Штёлтинг, Калленбах и Амрайн, 2008 г. , с. 9.
- ^ Stölting, Kallenbach & Amrhein 2008 , с. 5.
- ^ Перейти обратно: а б Бозе 2006 , стр. 480–81.
- ^ Bose 2006 , стр. 569–70.
- ^ Вукосавич, Слободан; Стефанович, Виктор Р. (ноябрь – декабрь 1991 г.). «Топологии инверторов SRM: сравнительная оценка». Протокол конференции Ежегодного собрания Общества промышленных приложений IEEE 1990 года . Том. 27. С. 1034–47. дои : 10.1109/IAS.1990.152299 . ISBN 0-87942-553-9 .
- ^ Ротерс, Герберт К. (январь 1947 г.). «Двигатель с гистерезисом – достижения, обеспечивающие экономичную дробную мощность». Пер. АИЭЭ . 66 (1): 1419–30. дои : 10.1109/T-AIEE.1947.5059594 . S2CID 51670991 .
- ^ Бакши, UA; Бакши, М.В. (2009). «§9.3 «Двигатели с гистерезисом» в главе 9 – Специальные машины» . Электрические машины – II (4-е изд.). Технические публикации Пуна. ISBN 978-81-8431-189-1 . Архивировано из оригинала 4 января 2018 г.
- ^ Ленденманн, Хайнц; и др. «Вперед на автомобиле» (PDF) . Проверено 18 апреля 2012 г.
- ^ Stölting, Kallenbach & Amrhein 2008 , с. 10.
- ^ Бозе 2006 , с. 389.
- ^ Киртли, Джеймс Л. младший (2005). «Примечания к классу 1: Электромагнитные силы» (PDF) . 6.6585 – Электрические машины . Кафедра электротехники Массачусетского технологического института. Архивировано (PDF) из оригинала 4 января 2017 года . Проверено 15 марта 2013 г.
- ^ «Расчеты двигателей постоянного тока, часть 1» . Национальные инструменты. 30 ноября 2011 года. Архивировано из оригинала 12 октября 2007 года . Проверено 7 декабря 2012 г.
- ^ Перейти обратно: а б Дуайт, Герберт Б.; Финк, Д.Г. от §27 до §35А Электромагнитная индукция ЭДС в гл. 2 – Электрические и магнитные цепи . стр. 36–41. в Ноултоне, 1949 г.
- ^ Стултинг, Ханс-Дитер; Калленбах, Эберхард; Амрайн, Вольфганг (29 апреля 2008 г.). Справочник по приводам дробной мощности . Спрингер. ISBN 978-3-540-73129-0 .
- ^ Мочала, Хельмут (1998). Малые электродвигатели . ISBN 978-0-85296-921-2 .
- ^ Руффо, Густаво Энрике. «Безкоромысловый двигатель Magnax с осевым магнитным потоком обещает КПД 98 процентов» . ВнутриEVs .
- ^ «Определение нагрузки и эффективности электродвигателя» (PDF) . Министерство энергетики США. Архивировано (PDF) из оригинала 30 ноября 2016 г. Проверено 22 июля 2021 г.
- ^ «Профиль продукта E3: электродвигатели» (PDF) . Энергоэффективность оборудования E3. Правительства Австралии и Новой Зеландии. Сентябрь 2013 г. Архивировано (PDF) из оригинала 28 марта 2020 г. Проверено 22 июля 2021 г.
- ^ «Тяговые двигатели|Продукция транспортных систем|Транспортные системы|Информация о продукции|Toyo Denki Seizo KK» www.toyodenki.co.jp .
- ^ Лейтуэйт, ER (февраль 1975 г.). «Линейные электрические машины – личный взгляд». Труды IEEE . 63 (2): 250–90. Бибкод : 1975IEEEP..63..250L . дои : 10.1109/PROC.1975.9734 . S2CID 20400221 .
- ^ Паттерсон, диджей; Брайс, CW; Дугал, РА; Ковури, Д. (1–4 июня 2003 г.). «Достоинства небольших современных электрических машин с постоянными магнитами» (PDF) . Конференция «Электрические машины и приводы», 2003. IEMDC'03 . Том. 2. ИИЭР. стр. 1195–200. дои : 10.1109/IEMDC.2003.1210392 . ISBN 0-7803-7817-2 . Архивировано (PDF) из оригинала 13 июня 2010 года.
- ^ Клатт, Фредерик В. (сентябрь 2012 г.). «Бездатчиковое управление в реальном времени (RTC)». 3-й Международный симпозиум IEEE по бездатчиковому управлению электроприводами (SLED 2012) . IEEE. стр. 1–6. дои : 10.1109/СЛЕД.2012.6422811 . ISBN 978-1-4673-2967-5 . S2CID 25815578 .
- ^ Миллер, Джон М. (2008). Силовые установки для гибридных автомобилей . ИЭПП. стр. 68, 69. ISBN. 978-0-86341-915-7 . [ постоянная мертвая ссылка ]
- ^ Рашид, Мухаммед Х. (2017). Справочник по силовой электронике . Баттерворт-Хайнеманн. п. 1042. ИСБН 978-0-12-811408-7 . [ постоянная мертвая ссылка ]
- ^ Штаймель, Андреас (2008). Электрическая тяга – движущая сила и энергоснабжение: основы и практический опыт . Ольденбургский промышленный союз. п. 142. ИСБН 978-3-8356-3132-8 . [ постоянная мертвая ссылка ]
- ^ «Equipmake анонсирует самый мощный в мире электродвигатель» . Новый Атлас . 4 марта 2020 г.
Библиография
[ редактировать ]- Финк, Дональд Г .; Бити, Х. Уэйн (2000). Стандартный справочник для инженеров-электриков . МакГроу-Хилл. ISBN 978-0-07-022005-8 .
- Хьюстон, Эдвин Дж.; Кеннелли, Артур, Современные типы динамо-электрических машин , Американская техническая книжная компания, 1897 г., опубликовано издательством PF Collier and Sons, Нью-Йорк, 1902 г.
- Куфальдт, Тони Р. (2000–2006). «Глава 13. Двигатели переменного тока» . Уроки электрических цепей – Том II . Проверено 11 апреля 2006 г.
- Розенблатт, Джек; Фридман, М. Гарольд (1984). Машины постоянного и переменного тока . Издательская компания CE Merrill. ISBN 978-0-675-20160-5 . [ постоянная мертвая ссылка ]
- Ноултон, А.Е., изд. (1949). Стандартный справочник для инженеров-электриков (8-е изд.). МакГроу-Хилл.
- Стольтинг, Ханс-Дитер Д.; Калленбах, Эберхард; Амрайн, В., ред. (2008). Справочник по приводам дробной мощности . Спрингер. ISBN 978-3-540-73128-3 .
- Хамейер, Кей (2001). «Электрическая машина I: основы, конструкция, функции, работа» (PDF) . RWTH Ахенский университет, Институт электрических машин. Архивировано из оригинала (PDF) 10 февраля 2013 года . Проверено 11 января 2013 г.
Дальнейшее чтение
[ редактировать ]- Бедфорд, Б.Д.; Хофт, Р.Г. (1964). Принципы инверторных схем . Нью-Йорк: Уайли. ISBN 978-0-471-06134-2 .
- Бозе, Бимал К. (2006). Силовая электроника и моторные приводы: достижения и тенденции . Академическая пресса. ISBN 978-0-12-088405-6 .
- Чиассон, Джон (2005). Моделирование и высокопроизводительное управление электрическими машинами (Интернет-изд.). Уайли. ISBN 978-0-471-68449-7 .
- Фицджеральд, А.Е.; Кингсли, Чарльз младший; Уманс, Стивен Д. (2003). Электромашины (6-е изд.). МакГроу-Хилл. стр. 688 страниц. ISBN 978-0-07-366009-7 .
- Пелли, БР (1971). Тиристорные фазоуправляемые преобразователи и циклоконвертеры: работа, управление и характеристики . Уайли-Интерсайенс. ISBN 978-0-471-67790-1 .
Внешние ссылки
[ редактировать ]- SparkMuseum: Ранние электродвигатели
- «Изобретение электродвигателя с 1800 по 1893 год» , организованный Мартином Доппельбауэром из Технологического института Карлсруше.
- MAS.865 2018 Как сделать что-то, что может сделать (почти) что угодно , замедленные гифки и осциллограммы для многих типов двигателей.