Декартов тензор

В геометрии и линейной алгебре тензор использует ортонормированный базис для представления тензора декартов в евклидовом пространстве в виде компонентов. Преобразование компонентов тензора из одного такого базиса в другой осуществляется посредством ортогонального преобразования .
Наиболее распространенными системами координат являются двумерная и трехмерная декартова система координат . Декартовы тензоры могут использоваться с любым евклидовым пространством или, более технически, с любым конечномерным векторным пространством над полем действительных чисел , имеющим внутренний продукт .
Использование декартовых тензоров происходит в физике и технике , например, с тензором напряжений Коши и тензором момента инерции в динамике твердого тела . Иногда общие криволинейные координаты высокодеформированных удобны, как в механике сплошных сред , или даже необходимы, как в общей теории относительности . Хотя для некоторых таких систем координат можно найти ортонормированные основы (например, касательные к сферическим координатам ), декартовы тензоры могут обеспечить значительное упрощение для приложений, в которых достаточно вращения прямолинейных осей координат. Преобразование является пассивным преобразованием , поскольку изменяются координаты, а не физическая система.
Декартов базис и связанная с ним терминология
[ редактировать ]Векторы в трех измерениях
[ редактировать ]В трехмерном евклидовом пространстве , базисом является ex , e e y , . z стандартным Каждый базисный вектор указывает вдоль осей x, y и z, и все векторы являются единичными векторами (или нормализованы), поэтому базис ортонормирован .

Везде, когда речь идет о декартовых координатах в трех измерениях , предполагается правосторонняя система, и на практике это встречается гораздо чаще, чем левосторонняя система, см. в разделе «Ориентация (векторное пространство)» подробности .
Для декартовых тензоров порядка 1 декартов вектор a можно записать алгебраически как линейную комбинацию базисных векторов e x , e y , e z :

где координаты вектора относительно декартова базиса обозначаются a x , a y , a z . Обычно и полезно отображать базисные векторы в виде векторов-столбцов.

когда у нас есть вектор координат в представлении вектора-столбца:

Представление вектора -строки также допустимо, хотя в контексте общих криволинейных систем координат представления вектора-строки и вектора-столбца используются отдельно по определенным причинам - . Обозначение Эйнштейна , а также ковариацию и контравариантность векторов почему см .
Термин «компонент» вектора неоднозначен: он может относиться к:
- конкретная координата вектора, например ( z скаляр), и аналогично для x и y , или
- координатный скаляр, умножающий соответствующий базисный вектор, и в этом случае « y ( вектор ) , и y-компонент» a представляет собой y e аналогично для x и z .
Более общая нотация — это нотация тензорного индекса , которая обеспечивает гибкость числовых значений, а не меток фиксированных координат. Декартовы метки заменяются тензорными индексами в базисных векторах e x ↦ e 1 , e y ↦ e 2 , e z ↦ e 3 и координатах a x ↦ a 1 , a y ↦ a 2 , a z ↦ a 3 . общем, обозначения e1 , , e2 В , e3 ; относятся к базису , а a2 соответствующей , a3 относятся любому к a1 системе координат хотя здесь они ограничиваются картезианской системой. Затем:

Стандартно используется нотация Эйнштейна - знак суммирования для суммирования по индексу, который присутствует ровно дважды в термине, может быть подавлен для краткости обозначений:

Преимущество индексной записи перед обозначениями, специфичными для координат, заключается в независимости размерности основного векторного пространства, т.е. одно и то же выражение в правой части принимает одну и ту же форму в более высоких измерениях (см. Ниже). Раньше декартовы метки x, y, z были просто метками, а не индексами. (Неофициально говорить « i = x, y, z»).
Тензоры второго порядка в трех измерениях
[ редактировать ]Диадический тензор T — это тензор второго порядка, образованный тензорным произведением ⊗ двух декартовых векторов a и b , записанных T = a ⊗ b . Аналогично векторам, его можно записать как линейную комбинацию тензорного базиса e x ⊗ e x ≡ e xx , e x ⊗ e y ≡ e xy , ..., e z ⊗ e z ≡ e zz (право- обратная сторона каждого тождества — это всего лишь аббревиатура, не более того):
![{\displaystyle {\begin{aligned}\mathbf {T} =\quad &\left(a_{\text{x}}\mathbf {e} _{\text{x}}+a_{\text{y} }\mathbf {e} _{\text{y}}+a_{\text{z}}\mathbf {e} _{\text{z}}\right)\times \left(b_{\text{x }}\mathbf {e} _{\text{x}}+b_{\text{y}}\mathbf {e} _{\text{y}}+b_{\text{z}}\mathbf {e } _{\text{z}}\right)\\[5pt]{}=\quad &a_{\text{x}}b_{\text{x}}\mathbf {e} _{ ext{x} } \times \mathbf {e} _{\text{x}}+a_{\text{x}}b_{\text{y}}\mathbf {e} _{\text{x}}\times \mathbf { e} _{\text{y}}+a_{\text{x}}b_{\text{z}}\mathbf {e} _{\text{x}}\times \mathbf {e} _{ ext {z}}\\[4pt]{}+{}&a_{\text{y}}b_{\text{x}}\mathbf {e} _{\text{y}}\times \mathbf { e} _{\text{x}}+a_{\text{y}}b_{\text{y}}\mathbf {e} _{\text{y}}\times \mathbf {e} _{\ text{ y}}+a_{\text{y}}b_{\text{z}}\mathbf {e} _{\text{y}}\times \mathbf {e} _{ ext{z}} \\[ 4pt]{}+{}&a_{\text{z}}b_{\text{x}}\mathbf {e} _{\text{z}}\times \mathbf {e} _{\text {x} }+a_{\text{z}}b_{\text{y}}\mathbf {e} _{\text{z}}\times \mathbf {e} _{ ext{y}}+ a_{\text {z}}b_{\text{z}}\mathbf {e} _{\text{z}}\times \mathbf {e} _{\text{z}}\end{aligned}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/6787d23e9971f53aa7becc609a96f17ad316e5cc)
Представление каждого базисного тензора в виде матрицы:

тогда T можно более систематически представить в виде матрицы:

См. умножение матриц , чтобы узнать о соответствии обозначений между матрицами и скалярным и тензорным произведениями.
В более общем смысле, независимо от того, является ли T тензорным произведением двух векторов, это всегда линейная комбинация базисных тензоров с координатами T xx , T xy , ..., T zz :
![{\displaystyle {\begin{aligned}\mathbf {T} =\quad &T_{\text{xx}}\mathbf {e} _{\text{xx}}+T_{\text{xy}}\mathbf { e} _{\text{xy}}+T_{\text{xz}}\mathbf {e} _{\text{xz}}\\[4pt]{}+{}&T_{\text{yx}} \mathbf {e} _{\text{yx}}+T_{\text{yy}}\mathbf {e} _{\text{yy}}+T_{\text{yz}}\mathbf {e} _ {\text{yz}}\\[4pt]{}+{}&T_{\text{zx}}\mathbf {e} _{\text{zx}}+T_{\text{zy}}\mathbf { e} _{\text{zy}}+T_{\text{zz}}\mathbf {e} _{\text{zz}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/46ed34dfebd3af288d7b1a96814953e4293548c4)
а в терминах тензорных индексов:

и в матричной форме:

Тензоры второго порядка естественным образом возникают в физике и технике, когда физические величины имеют зависимость от направления в системе, часто по принципу «стимул-реакция». Математически это можно увидеть через один аспект тензоров — они являются полилинейными функциями . Тензор второго порядка T , который принимает вектор u некоторой величины и направления, вернет вектор v ; другой величины и в другом направлении по отношению к вам , вообще. Обозначения, используемые для функций в математическом анализе, приводят нас к записи v − T ( u ) , [1] в то время как та же идея может быть выражена в матричных и индексных обозначениях [2] (включая соглашение о суммировании) соответственно:

По «линейному», если u = ρ r + σ s для двух скаляров ρ и σ и векторов r и s , то в обозначениях функции и индекса:
![{\displaystyle {\begin{aligned}\mathbf {v} &=&&\mathbf {T} (\rho \mathbf {r} +\sigma \mathbf {s} )&=&&\rho \mathbf {T} ( \mathbf {r} )+\sigma \mathbf {T} (\mathbf {s} )\\[1ex]v_{i}&=&&T_{ij}(\rho r_{j}+\sigma s_{j} )&=&&\rho T_{ij}r_{j}+\sigma T_{ij}s_{j}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e28d1cbdc6de65a90df9105486dec97531ee013f)
и аналогично для матричной записи. Обозначения функций, матриц и индексов означают одно и то же. Матричные формы обеспечивают четкое отображение компонентов, а индексная форма позволяет упростить тензорно-алгебраические манипуляции с формулами в компактной форме. Оба обеспечивают физическую интерпретацию направлений ; векторы имеют одно направление, а тензоры второго порядка соединяют два направления вместе. Можно связать индекс тензора или метку координат с направлением базисного вектора.
Использование тензоров второго порядка является минимумом для описания изменений величин и направлений векторов, поскольку скалярное произведение двух векторов всегда является скаляром, а векторное произведение двух векторов всегда является псевдовектором, перпендикулярным плоскости, определяемой векторы, поэтому эти произведения векторов сами по себе не могут получить новый вектор любой величины в любом направлении. (Подробнее о точечных и векторных произведениях см. ниже). Тензорное произведение двух векторов является тензором второго порядка, хотя само по себе оно не имеет очевидной интерпретации направления.
Предыдущую идею можно продолжить: если T принимает два вектора p и q , он вернет скаляр r . В обозначениях функций мы пишем r = T ( p , q ) , а в обозначениях матриц и индексов (включая соглашение о суммировании) соответственно:

Тензор T линеен по обоим входным векторам. Когда векторы и тензоры записываются без привязки к компонентам и не используются индексы, иногда ставится точка ⋅ там, где суммирование по индексам (так называемое тензорное сжатие производится ). Для вышеуказанных случаев: [1] [2]

мотивировано обозначением скалярного произведения:

В более общем смысле, тензор порядка m , который принимает n векторов (где n находится в диапазоне от 0 до m включительно), вернет тензор порядка m - n , в разделе «Тензор § Как полилинейные карты» дополнительные обобщения и подробности см. . Приведенные выше концепции применимы к псевдовекторам так же, как и к векторам. Сами векторы и тензоры могут меняться в пределах пространства, в этом случае мы имеем векторные поля и тензорные поля , а также могут зависеть от времени.
Ниже приведены некоторые примеры:
| Прикладное или данное... | ...к материалу или объекту... | ...результат... | ...в материале или объекте, заданном: |
|---|---|---|---|
| единичный вектор n | Тензор напряжений Коши σ | сила тяги t | |
| угловая скорость ω | момент инерции I | угловой момент J | |
| вращательная кинетическая энергия T | |||
| электрическое поле Е | электропроводность σ | поток плотности J тока | |
| поляризуемость α (связанная с диэлектрической проницаемостью ε и электрической восприимчивостью χ E ) | индуцированной поляризации поле P | ||
| магнитное H поле | магнитная проницаемость μ | магнитное B поле |






Для примера электропроводности индексные и матричные обозначения будут следующими:

а для вращательной кинетической энергии T :

См. также материальное уравнение для более специализированных примеров.
Векторы и тензоры в n измерениях
[ редактировать ]В n -мерном евклидовом пространстве над действительными числами , стандартный базис обозначается e 1 , e 2 , e 3 , en . ... Каждый базисный вектор e i направлен вдоль положительной оси x i , причем базис ортонормирован. Компонент j e i Кронекера определяется дельтой :


Вектор в принимает форму:

Аналогично для тензора второго порядка, приведенного выше, для каждого вектора a и b в :

или в более общем смысле:

Преобразования декартовых векторов (любое количество измерений)
[ редактировать ]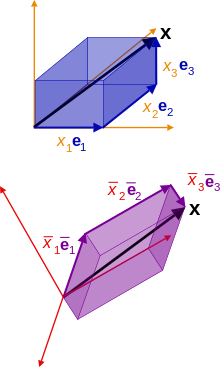
Значение слова «инвариантность» при преобразованиях координат.
[ редактировать ]Вектор положения x в является простым и распространенным примером вектора и может быть представлен в любой системе координат . Рассмотрим случай прямоугольных систем координат только с ортонормированными основаниями. Можно иметь систему координат с прямоугольной геометрией, если все базисные векторы взаимно перпендикулярны и не нормализованы, и в этом случае базис ортогонален , но не ортонормален . Однако ортонормированными базисами легче манипулировать, и они часто используются на практике. Следующие результаты верны для ортонормированных, а не ортогональных базисов.
В одной прямоугольной системе координат x как контрвектор имеет координаты x я и базисные векторы e i , а как ковектор он имеет координаты x i и базисные вектора e я , и мы имеем:

В другой прямоугольной системе координат x как контрвектор имеет координаты x я и базис e i , а как ковектор он имеет координаты x i и базис e я , и мы имеем:

Каждая новая координата является функцией всех старых, и наоборот для обратной функции :

и аналогично каждый новый базисный вектор является функцией всех старых, и наоборот для обратной функции:

для всех я , j .
Вектор инвариантен при любом изменении базиса, поэтому, если координаты преобразуются в соответствии с матрицей преобразования L , основания преобразуются в соответствии с обратной матрицей L. −1 , и наоборот, если координаты преобразуются согласно обратному L −1 , основания преобразуются в соответствии с матрицей L . Разницу между каждым из этих преобразований условно показывают через индексы в виде верхних индексов для контравариантности и нижних индексов для ковариации, а координаты и основания преобразуются линейно по следующим правилам:
| Векторные элементы | Контравариантный закон преобразования | Ковариантный закон преобразования |
|---|---|---|
| Координаты | ||
| Основа | ||
| Любой вектор |






где L я дж представляет записи матрицы преобразования (номер строки — i , номер столбца — j ) и ( L −1 ) я к обозначает элементы обратной матрицы матрицы L i к .
Если L — ортогональное преобразование ( ортогональная матрица ), то преобразуемые им объекты определяются как декартовы тензоры . Геометрически это интерпретируется так: прямоугольная система координат отображается в другую прямоугольную систему координат, в которой норма вектора x сохраняется (и сохраняются расстояния).
Определителем и L вращений является det( L ) = ±1 , что соответствует двум типам ортогонального преобразования: ( +1 ) для −1 ( ) для неправильных вращений (включая отражения ).
Существуют значительные алгебраические упрощения: транспонирование матрицы является обратным определению ортогонального преобразования:

Судя по предыдущей таблице, ортогональные преобразования ковекторов и контрвекторов идентичны. Нет необходимости различать повышение и понижение индексов , и в этом контексте и в приложениях к физике и технике все индексы обычно имеют индексы, чтобы избежать путаницы в показателях степени . Все индексы будут снижены в оставшейся части этой статьи. Фактические повышенные и пониженные индексы можно определить, рассмотрев, какие величины являются ковекторами или контрвекторами, а также соответствующие правила преобразования.
Точно такие же правила преобразования применяются к любому вектору a , а не только к вектору положения. Если его компоненты a i не преобразуются по правилам, a не является вектором.
Несмотря на схожесть приведенных выше выражений, для замены координат типа x дж = Л я дж х я , и действие тензора на вектор типа b i = T ij a j , L не является тензором, а T является. При замене координат L представляет собой матрицу , используемую для связи двух прямоугольных систем координат с ортонормированными основаниями. Для тензора, связывающего вектор с вектором, все векторы и тензоры в уравнении принадлежат одной и той же системе координат и базису.
Производные и матричные элементы Якобиана
[ редактировать ]Элементы L являются частными производными новых или старых координат относительно старых или новых координат соответственно.
Дифференцируя x i по x k :

так

является элементом матрицы Якобиана . Существует (частично мнемоническое) соответствие между позициями индексов, прикрепленных к L и в частной производной: i вверху и j внизу, в каждом случае, хотя для декартовых тензоров индексы могут быть понижены.
И наоборот, дифференцируя x j по x i :

так

является элементом обратной матрицы Якобиана с аналогичным соответствием индексов.
Во многих источниках преобразования указываются в терминах частных производных:
![{\displaystyle {\begin{array}{c}\displaystyle {\bar {x}}_{j}=x_{i}{\frac {\partial {\bar {x}}_{j}}{\ частичное x_{i}}}\\[3pt]\upharpoonleft \downharpoonright \\[3pt]\displaystyle x_{j}={\bar {x}}_{i}{\frac {\partial x_{j}} {\partial {\bar {x}}_{i}}}\end{array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8b21de707dc5fe75b7114edd3cbd484967cbfe43)
и явные матричные уравнения в 3d:

аналогично для

Проекции по координатным осям
[ редактировать ]
Как и все линейные преобразования, L зависит от выбранного базиса. Для двух ортонормированных базисов

- проецирование x на оси x :
- проецирование x на оси x :


Следовательно, компоненты сводятся к направляющим косинусам между осями x i и x j :

где θ ij и θ ji — углы между осями x i и x j . В общем, θ ij не равен θ ji , потому что, например, θ 12 и θ 21 представляют собой два разных угла.
Преобразование координат можно записать:
![{\displaystyle {\begin{array}{c}{\bar {x}}_{j}=x_{i}\left({\bar {\mathbf {e} }}_{i}\cdot \mathbf {e} _{j}\right)=x_{i}\cos \theta _{ij}\\[3pt]\upharpoonleft \downharpoonright \\[3pt]x_{j}={\bar {x}}_ {i}\left(\mathbf {e} _{i}\cdot {\bar {\mathbf {e} }}_{j}\right)={\bar {x}}_{i}\cos \ тета _{ji}\end{array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75af0615bd7dbb450be3a3d806f724fe3e9c2cd7)
и явные матричные уравнения в 3d:

аналогично для
Геометрическая интерпретация заключается в том, что компоненты x i равны сумме проекций компонентов x j на оси x j .
Числа e i ⋅ e j , организованные в матрицу, образуют симметричную матрицу (матрицу, равную ее собственному транспонированию) из-за симметрии скалярного произведения, фактически это метрический тензор g . Напротив, i ⋅ e j или e i ⋅ e j вообще . e не образуют симметричных матриц, как показано выше Следовательно, хотя матрицы L по-прежнему ортогональны, они не симметричны.
За исключением поворота вокруг какой-либо одной оси, при котором x i и x i для некоторого i совпадают, углы не совпадают с углами Эйлера , и поэтому матрицы L не совпадают с матрицами вращения .
Преобразование скалярного и векторного произведения (только три измерения)
[ редактировать ]Скалярное произведение и векторное произведение встречаются очень часто в приложениях векторного анализа в физике и технике, примеры включают:
- мощность, передаваемая P объектом, оказывающим силу F со скоростью v по прямолинейному пути:
- касательная скорость v в точке x вращающегося твердого тела с угловой скоростью ω :
- потенциальная энергия U магнитного диполя с магнитным моментом m в однородном внешнем магнитном поле B :
- угловой момент J для частицы с вектором положения r и импульсом p :
- крутящий момент τ, действующий на электрический диполь с электрическим дипольным моментом p в однородном внешнем электрическом поле E :
- индуцированного поверхностного Плотность тока j S в магнитном материале намагниченностью M на поверхности с единичной нормалью n :






Как эти произведения трансформируются при ортогональных преобразованиях, показано ниже.
Скалярное произведение, дельта Кронекера и метрический тензор
[ редактировать ]Скалярное произведение ⋅ каждой возможной пары базисных векторов следует из того, что базис ортонормирован. Для перпендикулярных пар имеем

а для параллельных пар имеем

Заменив декартовы метки индексными обозначениями, как показано выше , эти результаты можно резюмировать следующим образом:

где δij — компоненты дельты Кронекера . можно использовать декартов базис для представления δ Таким образом, .
Кроме того, каждый метрического тензора компонент g ij относительно любого базиса представляет собой скалярное произведение пары базисных векторов:

Для декартова основы компоненты, организованные в матрицу:

так же как и простейший из возможных для метрического тензора, а именно δ :

Это неверно для общих баз: ортогональные координаты имеют диагональные метрики, содержащие различные масштабные коэффициенты (т.е. не обязательно 1), тогда как общие криволинейные координаты также могут иметь ненулевые записи для недиагональных компонентов.
Скалярное произведение двух векторов a и b преобразуется в соответствии с

что интуитивно понятно, поскольку скалярное произведение двух векторов представляет собой один скаляр, не зависящий от каких-либо координат. Это также применимо в более общем плане к любым системам координат, а не только к прямоугольным; скалярное произведение в одной системе координат одинаково в любой другой.
Перекрестное произведение, символ Леви-Чивита и псевдовекторы
[ редактировать ]
Для векторного произведения ( × ) двух векторов результаты (почти) обратные. Опять же, предполагая правую трехмерную декартову систему координат, циклические перестановки в перпендикулярных направлениях дают следующий вектор в циклическом наборе векторов:
![{\displaystyle {\begin{aligned}\mathbf {e} _{\text{x}}\times \mathbf {e} _{\text{y}}&=\mathbf {e} _{\text{z }}&\mathbf {e} _{\text{y}}\times \mathbf {e} _{\text{z}}&=\mathbf {e} _{\text{x}}&\mathbf { e} _{\text{z}}\times \mathbf {e} _{\text{x}}&=\mathbf {e} _{\text{y}}\\[1ex]\mathbf {e} _{\text{y}}\times \mathbf {e} _{\text{x}}&=-\mathbf {e} _{\text{z}}&\mathbf {e} _{\text{ z}}\times \mathbf {e} _{\text{y}}&=-\mathbf {e} _{\text{x}}&\mathbf {e} _{\text{x}}\times \mathbf {e} _{\text{z}}&=-\mathbf {e} _{\text{y}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e8a511b1bf3ce4de69aef87251d9a131f582ad51)
а параллельные векторы явно исчезают:

и заменив декартовы метки индексными обозначениями, как указано выше , их можно резюмировать следующим образом:
![{\displaystyle \mathbf {e} _{i}\times \mathbf {e} _{j}= {\begin{cases}+\mathbf {e} _{k} & {\text{циклические перестановки: }} (i,j,k)=(1,2,3),(2,3,1),(3,1,2)\\[2pt]-\mathbf {e} _{k}&{\text {антициклические перестановки: }}(i,j,k)=(2,1,3),(3,2,1),(1,3,2)\\[2pt]{\boldsymbol {0}}&i =j\end{случаи}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb13f56b0db4c0e9710ce75db6319169d923c0b6)
где i , j , k — индексы, принимающие значения 1, 2, 3 . Отсюда следует, что:
![{\displaystyle {\mathbf {e} _{k}\cdot \mathbf {e} _{i}\times \mathbf {e} _{j}} = {\begin{cases}+1&{\text{циклический перестановки: }}(i,j,k)=(1,2,3),(2,3,1),(3,1,2)\\[2pt]-1&{\text{антициклические перестановки: } }(i,j,k)=(2,1,3),(3,2,1),(1,3,2)\\[2pt]0&i=j{\text{ или }}j=k {\text{ или }}k=i\end{случаи}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ce8669ba168084258ab72f5fc1e76b9664c5ca6e)
Эти перестановочные отношения и соответствующие им значения важны, и существует объект, совпадающий с этим свойством: символ Леви-Чивита , обозначаемый ε . Записи символов Леви-Чивита могут быть представлены в декартовой системе координат:

который геометрически соответствует объему куба , натянутого ортонормированными базисными векторами, со знаком, указывающим ориентацию (а не «положительный или отрицательный объем»). Здесь ориентация фиксируется соотношением ε 123 = +1 для правосторонней системы. Левая система зафиксирует ε 123 = −1 или, что то же самое, ε 321 = +1 .
Скалярное тройное произведение теперь можно записать:

с геометрической интерпретацией объема (параллелепипеда, натянутого на a , b , c ) и алгебраически является определителем : [3] : 23

Это, в свою очередь, можно использовать для перезаписи векторного произведения двух векторов следующим образом:

Вопреки своему внешнему виду, символ Леви-Чивита является не тензором , а псевдотензором , компоненты которого преобразуются по закону:

Следовательно, преобразование векторного произведения a и b равно:
![{\displaystyle {\begin{aligned}&\left({\bar {\mathbf {a} }}\times {\bar {\mathbf {b} }}\right)_{i}\\[1ex]{ }={}&{\bar {\varepsilon }}_{ijk}{\bar {a}}_{j}{\bar {b}}_{k}\\[1ex]{}={}& \det({\boldsymbol {\mathsf {L}}})\;\;\varepsilon _{pqr}\;\;{\mathsf {L}}_{pi}{\mathsf {L}}_{qj }{\mathsf {L}}_{rk}\;\;a_{m}{\mathsf {L}}_{mj}\;\;b_{n}{\mathsf {L}}_{nk} \\[1ex]{}={}&\det({\boldsymbol {\mathsf {L}}})\;\;\varepsilon _{pqr}\;\;{\mathsf {L}}_{pi }\;\;{\mathsf {L}}_{qj}\left({\boldsymbol {\mathsf {L}}}^{-1}\right)_{jm}\;\;{\mathsf { L}}_{rk}\left({\boldsymbol {\mathsf {L}}}^{-1}\right)_{kn}\;\;a_{m}\;\;b_{n}\ \[1ex]{}={}&\det({\boldsymbol {\mathsf {L}}})\;\;\varepsilon _{pqr}\;\;{\mathsf {L}}_{pi} \;\;\delta _{qm}\;\;\delta _{rn}\;\;a_{m}\;\;b_{n}\\[1ex]{}={}&\det( {\boldsymbol {\mathsf {L}}})\;\;{\mathsf {L}}_{pi}\;\;\varepsilon _{pqr}a_{q}b_{r}\[1ex] { }={}&\det({\boldsymbol {\mathsf {L}}})\;\;(\mathbf {a} \times \mathbf {b} )_{p}{\mathsf {L}} _ {pi}\end{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a70dd9afca45435678bf28dea0b8f00896ce0af4)
и поэтому a × b преобразуется в псевдовектор из-за определяющего фактора.
Обозначение тензорного индекса применяется к любому объекту, который имеет сущности, образующие многомерные массивы — не все, что имеет индексы, по умолчанию является тензором. Вместо этого тензоры определяются тем, как изменяются их координаты и базисные элементы при преобразовании из одной системы координат в другую.
Обратите внимание, что векторное произведение двух векторов является псевдовектором, а векторное произведение псевдовектора на вектор — это другой вектор.
Применение тензора δ и ε псевдотензора
[ редактировать ]Другие тождества могут быть сформированы из тензора δ и псевдотензора ε . Примечательным и очень полезным тождеством является тождество, которое преобразует два символа Леви-Чивита, смежно сжатых по двум индексам, в антисимметричную комбинацию дельт Кронекера:

Индексные формы скалярного и векторного произведений вместе с этим тождеством значительно облегчают манипулирование и вывод других тождеств в векторном исчислении и алгебре, которые, в свою очередь, широко используются в физике и технике. Например, ясно, что скалярное и векторное произведение являются распределительными по отношению к сложению векторов:
![{\displaystyle {\begin{aligned}\mathbf {a} \cdot (\mathbf {b} +\mathbf {c})&=a_{i}(b_{i}+c_{i})=a_{i }b_{i}+a_{i}c_{i}=\mathbf {a} \cdot \mathbf {b} +\mathbf {a} \cdot \mathbf {c} \\[1ex]\mathbf {a} imes (\mathbf {b} +\mathbf {c})&=\mathbf {e} _{i}\varepsilon _{ijk}a_{j}(b_{k}+c_{k})=\mathbf { e} _{i}\varepsilon _{ijk}a_{j}b_{k}+\mathbf {e} _{i}\varepsilon _{ijk}a_{j}c_{k}=\mathbf {a } \times \mathbf {b} +\mathbf {a} \times \mathbf {c} \end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75b186f3493c97a5fc8cf2d6a480c3fd31baab36)
не прибегая к каким-либо геометрическим построениям – вывод в каждом случае представляет собой быстрый набор алгебры. Хотя процедура менее очевидна, можно также получить тройное произведение векторов. Переписывание в индексной записи:
![{\displaystyle \left[\mathbf {a} \times (\mathbf {b} \times \mathbf {c})\right]_{i} = \varepsilon _ {ijk}a_ {j}(\varepsilon _{ k\ell m}b_{\ell }c_{m})=(\varepsilon _{ijk}\varepsilon _{k\ell m})a_{j}b_{\ell }c_{m}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4b9cde24704b0895884d8c931caa33fc38e87de0)
и поскольку циклические перестановки индексов в символе ε не меняют его значения, циклическая перестановка индексов в ε kℓm для получения ε ℓmk позволяет нам использовать приведенное выше тождество δ - ε для преобразования символов ε в тензоры δ :
![{\displaystyle {\begin{aligned}\left[\mathbf {a} \times (\mathbf {b} \times \mathbf {c})\right]_{i}{}={}&\left(\ delta _{i\ell }\delta _{jm}-\delta _{im}\delta _{j\ell }\right)a_{j}b_{\ell }c_{m}\\{}={ }&\delta _{i\ell }\delta _{jm}a_{j}b_{\ell }c_{m}-\delta _{im}\delta _{j\ell }a_{j}b_{ \ell }c_{m}\\{}={}&a_{j}b_{i}c_{j}-a_{j}b_{j}c_{i}\\{}={}&\left[ (\mathbf {a} \cdot \mathbf {c} )\mathbf {b} -(\mathbf {a} \cdot \mathbf {b} )\mathbf {c} \right]_{i}\end{aligned }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d550929cd46207bdfed0c369113067c814100fc4)
таким образом:

Обратите внимание, что это антисимметрично по b и c , как и ожидалось с левой стороны. Аналогично, с помощью индексной записи или даже просто циклически переименовывая a , b и c в предыдущем результате и принимая отрицательный результат:

и разница в результатах показывает, что векторное произведение не является ассоциативным. Более сложные тождества, например четверные произведения;

и так далее, могут быть получены аналогичным образом.
Преобразования декартовых тензоров (любое количество измерений)
[ редактировать ]Тензоры определяются как величины, которые определенным образом преобразуются при линейных преобразованиях координат.
Второй заказ
[ редактировать ]Пусть a = a i e i и b = b i e i — два вектора, так что они преобразуются в соответствии с a j = a i L ij , b j = b i L ij .
Взятие тензорного произведения дает:

затем применяя преобразование к компонентам

и на базы

дает закон преобразования тензора второго порядка. Тензор a ⊗ b инвариантен относительно этого преобразования:
![{\displaystyle {\begin{aligned}{\bar {a}}_{p}{\bar {b}}_{q}{\bar {\mathbf {e} }}_{p}\times {\ bar {\mathbf {e} }}_{q}{}={}&{\mathsf {L}}_{kp}{\mathsf {L}}_{\ell q}a_{k}b_{\ ell }\,\left({\boldsymbol {\mathsf {L}}}^{-1}\right)_{pi}\left({\boldsymbol {\mathsf {L}}}^{-1}\ right)_{qj}\mathbf {e} _{i}\times \mathbf {e} _{j}\\[1ex]{}={}&{\mathsf {L}}_{kp}\left ({\boldsymbol {\mathsf {L}}}^{-1}\right)_{pi}{\mathsf {L}}_{\ell q}\left({\boldsymbol {\mathsf {L}} }^{-1}\right)_{qj}\,a_{k}b_{\ell }\mathbf {e} _{i}\times \mathbf {e} _{j}\\[1ex]{ }={}&\delta _{k}{}_{i}\delta _{\ell j}\,a_{k}b_{\ell }\mathbf {e} _{i}\times \mathbf { e} _{j}\\[1ex]{}={}&a_{i}b_{j}\mathbf {e} _{i}\times \mathbf {e} _{j}\end{aligned}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/099864e5e3414b697046ea351df9a4cfd87416cf)
В более общем смысле, для любого тензора второго порядка

компоненты преобразуются в соответствии с;

и базис преобразуется следующим образом:

Если R не преобразуется в соответствии с этим правилом – какой бы величиной R ни была – это не тензор второго порядка.
Любой заказ
[ редактировать ]любого порядка p В более общем смысле, для тензора

компоненты преобразуются в соответствии с;

и базис преобразуется следующим образом:

Для псевдотензора S порядка p компоненты преобразуются в соответствии с;

Псевдовекторы как антисимметричные тензоры второго порядка
[ редактировать ]Антисимметричная природа векторного произведения может быть преобразована в тензорную форму следующим образом. [2] Пусть c — вектор, a — псевдовектор, b — другой вектор, а T — тензор второго порядка такой, что:

Поскольку векторное произведение линейно по a и b , компоненты T можно найти путем проверки:

поэтому псевдовектор a можно записать как антисимметричный тензор. Это преобразуется как тензор, а не псевдотензор. Для приведенного выше механического примера тангенциальной скорости твердого тела, заданной выражением v = ω × x , это можно переписать как v = Ω ⋅ x, где Ω — тензор, соответствующий псевдовектору ω :

Например, в электромагнетизме , хотя электрическое поле E является векторным полем , магнитное поле B является псевдовекторным полем. Эти поля определяются силой Лоренца для частицы с электрическим зарядом q, движущейся со скоростью v :

и учитывая второй член, содержащий векторное произведение псевдовектора B и вектора скорости v , его можно записать в матричной форме, где F , E и v являются векторами-столбцами, а B — антисимметричной матрицей:

Если псевдовектор явно задается векторным произведением двух векторов (в отличие от векторного произведения с другим вектором), то такие псевдовекторы также можно записать как антисимметричные тензоры второго порядка, где каждая запись является компонентом векторного произведения. Угловой момент классической точечной частицы, вращающейся вокруг оси, определяемой соотношением J = x × p , является еще одним примером псевдовектора с соответствующим антисимметричным тензором:

Хотя декартовы тензоры не встречаются в теории относительности; тензорная форма орбитального углового момента J входит в пространственноподобную часть тензора релятивистского углового момента , а указанная выше тензорная форма магнитного поля B входит в пространственноподобную часть электромагнитного тензора .
Векторное и тензорное исчисление
[ редактировать ]Следующие формулы очень просты в декартовых координатах - в общих криволинейных координатах есть факторы метрики и ее определителя - см. тензоры в криволинейных координатах для более общего анализа .
Векторное исчисление
[ редактировать ]Ниже приведены дифференциальные операторы векторного исчисления . Пусть далее Φ( r , t ) — скалярное поле и
![{\displaystyle {\begin{aligned}\mathbf {A} (\mathbf {r},t)&=A_{\text{x}}(\mathbf {r},t)\mathbf {e}_{\ text{x}}+A_{\text{y}}(\mathbf {r} ,t)\mathbf {e}_{\text{y}}+A_{\text{z}}(\mathbf {r } ,t)\mathbf {e}_{\text{z}}\\[1ex]\mathbf {B} (\mathbf {r} ,t)&=B_{\text{x}}(\mathbf { r} ,t)\mathbf {e}_{\text{x}}+B_{\text{y}}(\mathbf {r} ,t)\mathbf {e}_{\text{y}}+ B_{\text{z}}(\mathbf {r},t)\mathbf {e}_{\text{z}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c2452f898aba9ee9e6f52ff1d6016ef4894bf8e)
быть векторными полями , в которых все скалярные и векторные поля являются функциями вектора положения r и времени t .
Оператор градиента в декартовых координатах определяется следующим образом:

а в индексных обозначениях это обычно сокращается по-разному:

Этот оператор воздействует на скалярное поле Φ, получая векторное поле, направленное с максимальной скоростью возрастания Φ:

Обозначение индекса для скалярного и векторного произведений переносится на дифференциальные операторы векторного исчисления. [3] : 197
Производная по направлению скалярного поля Φ — это скорость изменения Φ вдоль некоторого вектора направления a (не обязательно единичного вектора ), сформированного из компонентов a и градиента:

Дивергенция равна векторного поля A :

Обратите внимание, что замена компонентов градиента и векторного поля дает другой дифференциальный оператор.

который может действовать на скалярные или векторные поля. Фактически, если A заменить полем скорости u ( r , t ) жидкости, это член материальной производной (со многими другими названиями) механики сплошной среды , а другим термином является частная производная по времени:

которое обычно действует на поле скорости, приводящее к нелинейности в уравнениях Навье-Стокса .
Что касается ротора векторного поля A , то его можно определить как псевдовекторное поле с помощью символа ε :

которое действительно только в трех измерениях, или антисимметричное тензорное поле второго порядка посредством антисимметризации индексов, на что указывает разделение антисимметричных индексов квадратными скобками (см. исчисление Риччи ):
![{\displaystyle \left(\nabla \times \mathbf {A} \right)_{ij}=\nabla _{i}A_{j}-\nabla _{j}A_{i}=2\nabla _{ [я}А_{j]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/486f801d7a7b979c2d973950cb58fa83e3ccae75)
которое справедливо в любом количестве измерений. В каждом случае порядок компонентов градиента и векторного поля не следует менять местами, поскольку это приведет к другому дифференциальному оператору:
![{\displaystyle \varepsilon _{ijk}A_{j}\nabla _{k}=A_{i}\nabla _{j}-A_{j}\nabla _{i}=2A_{[i}\nabla _ {j]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c79a34eda6ac9c61c34645e4b81a1ab1ddb212af)
который может действовать на скалярные или векторные поля.
Наконец, оператор Лапласа определяется двумя способами: дивергенция градиента скалярного поля Φ :

или квадрат оператора градиента, действующего на скалярное поле Φ или векторное поле A :

В физике и технике градиент, дивергенция, ротор и оператор Лапласа неизбежно возникают в механике жидкости , ньютоновской гравитации , электромагнетизме , теплопроводности и даже в квантовой механике .
Тождества векторного исчисления могут быть получены аналогично тождествам векторных точечных, векторных произведений и комбинаций. Например, в трех измерениях ротор векторного произведения двух векторных полей A и B :
![{\displaystyle {\begin{aligned}&\left[\nabla \times (\mathbf {A} \times \mathbf {B})\right]_{i}\\{}={}&\varepsilon _{ ijk}\nabla _{j}(\varepsilon _{k\ell m}A_{\ell }B_{m})\\{}={}&(\varepsilon _{ijk}\varepsilon _{\ell mk })\nabla _{j}(A_{\ell }B_{m})\\{}={}&(\delta _{i\ell }\delta _{jm}-\delta _{im}\ delta _{j\ell })(B_{m}\nabla _{j}A_{\ell }+A_{\ell }\nabla _{j}B_{m})\\{}={}&( B_{j}\nobla _{j}A_{i}+A_{i}\nobla _{j}B_{j})-(B_{i}\nobla _{j}A_{j}+A_{j }\table _{j}B_{i})\\{}={}&(B_{j}\table _{j})A_{i}+A_{i}(\table _{j}B_{ j})-B_{i}(\nabla _{j}A_{j})-(A_{j}\nabla _{j})B_{i}\\{}={}&\left[(\ mathbf {B} \cdot \nabla )\mathbf {A} +\mathbf {A} (\mathbf {B} (\mathbf {A})-( \mathbf {A} \cdot \nabla )\mathbf {B} \right]_{i}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42b19f500acba4628d9612d2a5b3caddece6ece0)
где правило произведения использовалось , и повсюду дифференциальный оператор не менялся местами с A или B . Таким образом:

Тензорное исчисление
[ редактировать ]Можно продолжить действия с тензорами более высокого порядка. Пусть T = T ( r , t ) обозначает тензорное поле второго порядка, снова зависящее от вектора положения r и времени t .
Например, градиент векторного поля в двух эквивалентных обозначениях («двоичном» и «тензорном» соответственно):

которое является тензорным полем второго порядка.
Дивергенция тензора равна:

которое является векторным полем. Это возникает в механике сплошной среды в законах движения Коши - дивергенция тензора напряжений Коши σ представляет собой векторное поле, связанное с объемными силами, действующими на жидкость.
Отличие от стандартного тензорного исчисления
[ редактировать ]Декартовы тензоры такие же, как в тензорной алгебре , но евклидова структура и ограничение базиса вносят некоторые упрощения по сравнению с общей теорией.
Общая тензорная алгебра состоит из общих смешанных тензоров типа ( p , q ) :

с базовыми элементами:

компоненты преобразуются в соответствии с:

что касается баз:

Для декартовых тензоров в евклидовом пространстве с ортонормированным базисом имеет значение только порядок p + q тензора, и все p + q индексы могут быть понижены. Декартов базис не существует, если векторное пространство не имеет положительно определенной метрики, и поэтому его нельзя использовать в релятивистском контексте.
История
[ редактировать ]Диадические тензоры исторически были первым подходом к формулированию тензоров второго порядка, аналогично триадическим тензорам для тензоров третьего порядка и так далее. Декартовы тензоры используют обозначение тензорного индекса , в котором дисперсия может быть замаскирована и часто игнорируется, поскольку компоненты остаются неизменными при повышении и понижении индексов .
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Jump up to: а б К.В. Миснер ; К.С. Торн ; Дж. А. Уилер (15 сентября 1973 г.). Гравитация . Макмиллан. ISBN 0-7167-0344-0 . , используется повсюду
- ^ Jump up to: а б с TWB Киббл (1973). Классическая механика . Европейская серия по физике (2-е изд.). МакГроу Хилл. ISBN 978-0-07-084018-8 . , см. Приложение C.
- ^ Jump up to: а б г-н Шпигель; С. Липшуц; Д. Спеллман (2009). Векторный анализ . Очерки Шаума (2-е изд.). МакГроу Хилл. ISBN 978-0-07-161545-7 .
Общие ссылки
[ редактировать ]- Округ Колумбия Кей (1988). Тензорное исчисление . Очерки Шаума. МакГроу Хилл. стр. 18–19, 31–32. ISBN 0-07-033484-6 .
- г-н Шпигель; С. Липшуц; Д. Спеллман (2009). Векторный анализ . Очерки Шаума (2-е изд.). МакГроу Хилл. п. 227. ИСБН 978-0-07-161545-7 .
- Дж. Р. Тилдесли (1975). Введение в тензорный анализ для инженеров и ученых-прикладников . Лонгман. стр. 5–13. ISBN 0-582-44355-5 .
Дальнейшее чтение и приложения
[ редактировать ]- С. Липшуц; М. Липсон (2009). Линейная алгебра . Очерки Шаума (4-е изд.). МакГроу Хилл. ISBN 978-0-07-154352-1 .
- Пей Чи Чжоу (1992). Эластичность: тензорный, диадический и инженерный подходы . Публикации Courier Dover. ISBN 048-666-958-0 .
- Т.В. Кернер (2012). Векторы, чистые и прикладные: общее введение в линейную алгебру . Издательство Кембриджского университета. п. 216. ИСБН 978-11070-3356-6 .
- Р. Торретти (1996). Относительность и геометрия . Публикации Courier Dover. п. 103. ИСБН 0-4866-90466 .
- JJL Синг; А. Шильд (1978). Тензорное исчисление . Публикации Courier Dover. п. 128. ИСБН 0-4861-4139-Х .
- К.А. Балафутис; Р. В. Патель (1991). Динамический анализ роботов-манипуляторов: декартово-тензорный подход . Международная серия Kluwer по инженерным и компьютерным наукам: Робототехника: зрение, манипулирование и датчики. Том. 131. Спрингер. ISBN 0792-391-454 .
- С.Г. Цафестас (1992). Робототехнические системы: передовые технологии и приложения . Спрингер. ISBN 0-792-317-491 .
- Т. Дасс; С.К. Шарма (1998). Математические методы в классической и квантовой физике . Университетская пресса. п. 144. ИСБН 817-371-0899 .
- Храм GFJ (2004). Декартовы тензоры: введение . Серия Дуврских книг по математике. Дувр. ISBN 0-4864-3908-9 .
- Х. Джеффрис (1961). Декартовы тензоры . Издательство Кембриджского университета. ISBN 9780521054232 .