Интерфейс мозг-компьютер
Интерфейс мозг-компьютер ( BCI ), иногда называемый интерфейсом мозг-машина ( ИМТ ), представляет собой прямую связь между электрической активностью мозга и внешним устройством, чаще всего компьютером или роботизированной конечностью. BCI часто направлены на исследование, картирование , помощь, улучшение или восстановление когнитивных или сенсомоторных функций человека . [1] Их часто концептуализируют как интерфейс человека и машины , в котором отсутствуют движущиеся части тела (руки...), хотя они также открывают возможность стирания различия между мозгом и машиной . Реализации BCI варьируются от неинвазивных ( ЭЭГ , МЭГ , МРТ ) и частично инвазивных ( ЭКоГ и эндоваскулярные) до инвазивных ( микроэлектродная матрица ), в зависимости от того, насколько физически близки электроды к ткани мозга. [2]
Исследования BCI начались в 1970-х годах Жаком Видалем в Калифорнийском университете в Лос-Анджелесе (UCLA) по гранту Национального научного фонда , за которым последовал контракт с DARPA . [3] [4] выражение « интерфейс мозг-компьютер» Статья Видаля 1973 года ввела в научную литературу .
Благодаря пластичности коры головного мозга сигналы от имплантированных протезов после адаптации могут обрабатываться мозгом как естественные сенсорные или эффекторные каналы. [5] После многих лет экспериментов на животных в середине 1990-х годов первые нейропротезы были имплантированы людям.
Studies in human-computer interaction via the application of machine learning to statistical temporal features extracted from the frontal lobe (EEG brainwave) data has achieved success in classifying mental states (relaxed, neutral, concentrating),[6] mental emotional states (negative, neutral, positive),[7] and thalamocortical dysrhythmia.[8]
History
[edit]The history of brain-computer interfaces (BCIs) starts with Hans Berger's discovery of the brain's electrical activity and the development of electroencephalography (EEG). In 1924 Berger was the first to record human brain activity utilizing EEG. Berger was able to identify oscillatory activity, such as the alpha wave (8–13 Hz), by analyzing EEG traces.
Berger's first recording device was rudimentary. He inserted silver wires under the scalps of his patients. These were later replaced by silver foils attached to the patient's head by rubber bandages. Berger connected these sensors to a Lippmann capillary electrometer, with disappointing results. However, more sophisticated measuring devices, such as the Siemens double-coil recording galvanometer, which displayed voltages as small as 10-4 volt, led to success.
Berger analyzed the interrelation of alternations in his EEG wave diagrams with brain diseases. EEGs permitted completely new possibilities for brain research.
Although the term had not yet been coined, one of the earliest examples of a working brain-machine interface was the piece Music for Solo Performer (1965) by American composer Alvin Lucier. The piece makes use of EEG and analog signal processing hardware (filters, amplifiers, and a mixing board) to stimulate acoustic percussion instruments. Performing the piece requires producing alpha waves and thereby "playing" the various instruments via loudspeakers that are placed near or directly on the instruments.[9]
Vidal coined the term "BCI" and produced the first peer-reviewed publications on this topic.[3][4] He is widely recognized as the inventor of BCIs.[10][11][12] A review pointed out that Vidal's 1973 paper stated the "BCI challenge"[13] of controlling external objects using EEG signals, and especially use of Contingent Negative Variation (CNV) potential as a challenge for BCI control. Vidal's 1977 experiment was the first application of BCI after his 1973 BCI challenge. It was a noninvasive EEG (actually Visual Evoked Potentials (VEP)) control of a cursor-like graphical object on a computer screen. The demonstration was movement in a maze.[14]
1988 was the first demonstration of noninvasive EEG control of a physical object, a robot. The experiment demonstrated EEG control of multiple start-stop-restart cycles of movement, along an arbitrary trajectory defined by a line drawn on a floor. The line-following behavior was the default robot behavior, utilizing autonomous intelligence and an autonomous energy source.[15][16][17][18]
In 1990, a report was given on a closed loop, bidirectional, adaptive BCI controlling a computer buzzer by an anticipatory brain potential, the Contingent Negative Variation (CNV) potential.[19][20] The experiment described how an expectation state of the brain, manifested by CNV, used a feedback loop to control the S2 buzzer in the S1-S2-CNV paradigm. The resulting cognitive wave representing the expectation learning in the brain was termed Electroexpectogram (EXG). The CNV brain potential was part of Vidal's 1973 challenge.
Studies in the 2010s suggested neural stimulation's potential to restore functional connectivity and associated behaviors through modulation of molecular mechanisms.[21][22] This opened the door for the concept that BCI technologies may be able to restore function.
Beginning in 2013, DARPA funded BCI technology through the BRAIN initiative, which supported work out of teams including University of Pittsburgh Medical Center,[23] Paradromics,[24] Brown,[25] and Synchron.[26]
Neuroprosthetics
[edit]Neuroprosthetics is an area of neuroscience concerned with neural prostheses, that is, using artificial devices to replace the function of impaired nervous systems and brain-related problems, or of sensory or other organs (bladder, diaphragm, etc.). As of December 2010, cochlear implants had been implanted as neuroprosthetic devices in some 736,900 people worldwide.[27] Other neuroprosthetic devices aim to restore vision, including retinal implants. The first neuroprosthetic device, however, was the pacemaker.
The terms are sometimes used interchangeably. Neuroprosthetics and BCIs seek to achieve the same aims, such as restoring sight, hearing, movement, ability to communicate, and even cognitive function.[1] Both use similar experimental methods and surgical techniques.
Animal research
[edit]Several laboratories have managed to read signals from monkey and rat cerebral cortices to operate BCIs to produce movement. Monkeys have moved computer cursors and commanded robotic arms to perform simple tasks simply by thinking about the task and seeing the results, without motor output.[28] In May 2008 photographs that showed a monkey at the University of Pittsburgh Medical Center operating a robotic arm by thinking were published in multiple studies.[29] Sheep have also been used to evaluate BCI technology including Synchron's Stentrode.
In 2020, Elon Musk's Neuralink was successfully implanted in a pig.[30] In 2021, Musk announced that the company had successfully enabled a monkey to play video games using Neuralink's device.[31]
Early work
[edit]
In 1969 operant conditioning studies by Fetz et.al. at the Regional Primate Research Center and Department of Physiology and Biophysics, University of Washington School of Medicine showed that monkeys could learn to control the deflection of a biofeedback arm with neural activity.[32] Similar work in the 1970s established that monkeys could learn to control the firing rates of individual and multiple neurons in the primary motor cortex if they were rewarded accordingly.[33]
Algorithms to reconstruct movements from motor cortex neurons, which control movement, date back to the 1970s. In the 1980s, Georgopoulos at Johns Hopkins University found a mathematical relationship between the electrical responses of single motor cortex neurons in rhesus macaque monkeys and the direction in which they moved their arms. He also found that dispersed groups of neurons, in different areas of the monkey's brains, collectively controlled motor commands. He was able to record the firings of neurons in only one area at a time, due to equipment limitations.[34]
Several groups have been able to capture complex brain motor cortex signals by recording from neural ensembles (groups of neurons) and using these to control external devices.[citation needed]
Research
[edit]Kennedy and Yang Dan
[edit]Phillip Kennedy (Neural Signals founder (1987) and colleagues built the first intracortical brain–computer interface by implanting neurotrophic-cone electrodes into monkeys.[citation needed]
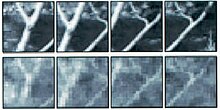
In 1999, Yang Dan et.al. at University of California, Berkeley decoded neuronal firings to reproduce images from cats. The team used an array of electrodes embedded in the thalamus (which integrates the brain's sensory input). Researchers targeted 177 brain cells in the thalamus lateral geniculate nucleus area, which decodes signals from the retina. Neuron firings were recorded from watching eight short movies. Using mathematical filters, the researchers decoded the signals to reconstruct recognizable scenes and moving objects.[35]
Nicolelis
[edit]Duke University professor Miguel Nicolelis advocates using multiple electrodes spread over a greater area of the brain to obtain neuronal signals.
After initial studies in rats during the 1990s, Nicolelis and colleagues developed BCIs that decoded brain activity in owl monkeys and used the devices to reproduce monkey movements in robotic arms. Monkeys' advanced reaching and grasping abilities and hand manipulation skills, made them good test subjects.
By 2000, the group succeeded in building a BCI that reproduced owl monkey movements while the monkey operated a joystick or reached for food.[36] The BCI operated in real time and could remotely control a separate robot. But the monkeys received no feedback (open-loop BCI).

Later experiments on rhesus monkeys included feedback and reproduced monkey reaching and grasping movements in a robot arm. Their deeply cleft and furrowed brains made them better models for human neurophysiology than owl monkeys. The monkeys were trained to reach and grasp objects on a computer screen by manipulating a joystick while corresponding movements by a robot arm were hidden.[37][38] The monkeys were later shown the robot and learned to control it by viewing its movements. The BCI used velocity predictions to control reaching movements and simultaneously predicted gripping force.
In 2011 O'Doherty and colleagues showed a BCI with sensory feedback with rhesus monkeys. The monkey controlled the position of an avatar arm while receiving sensory feedback through direct intracortical stimulation (ICMS) in the arm representation area of the sensory cortex.[39]
Donoghue, Schwartz, and Andersen
[edit]
Other laboratories that have developed BCIs and algorithms that decode neuron signals include John Donoghue at the Carney Institute for Brain Science at Brown University, Andrew Schwartz at the University of Pittsburgh, and Richard Andersen at Caltech. These researchers produced working BCIs using recorded signals from far fewer neurons than Nicolelis (15–30 neurons versus 50–200 neurons).
The Carney Institute reported training rhesus monkeys to use a BCI to track visual targets on a computer screen (closed-loop BCI) with or without a joystick.[40] The group created a BCI for three-dimensional tracking in virtual reality and reproduced BCI control in a robotic arm.[41] The same group demonstrated that a monkey could feed itself pieces of fruit and marshmallows using a robotic arm controlled by the animal's brain signals.[42][43][44]
Andersen's group used recordings of premovement activity from the posterior parietal cortex, including signals created when experimental animals anticipated receiving a reward.[45]
Other research
[edit]In addition to predicting kinematic and kinetic parameters of limb movements, BCIs that predict electromyographic or electrical activity of the muscles of primates are in process.[46] Such BCIs could restore mobility in paralyzed limbs by electrically stimulating muscles.
Nicolelis and colleagues demonstrated that large neural ensembles can predict arm position. This work allowed BCIs to read arm movement intentions and translate them into actuator movements. Carmena and colleagues[37] programmed a BCI that allowed a monkey to control reaching and grasping movements by a robotic arm. Lebedev and colleagues argued that brain networks reorganize to create a new representation of the robotic appendage in addition to the representation of the animal's own limbs.[38]
In 2019, a study reported a BCI that had the potential to help patients with speech impairment caused by neurological disorders. Their BCI used high-density electrocorticography to tap neural activity from a patient's brain and used deep learning to synthesize speech.[47][48] In 2021, those researchers reported the potential of a BCI to decode words and sentences in an anarthric patient who had been unable to speak for over 15 years.[49][50]
The biggest impediment to BCI technology is the lack of a sensor modality that provides safe, accurate and robust access to brain signals. The use of a better sensor expands the range of communication functions that can be provided using a BCI.
Development and implementation of a BCI system is complex and time-consuming. In response to this problem, Gerwin Schalk has been developing BCI2000, a general-purpose system for BCI research, since 2000.[51]
A new 'wireless' approach uses light-gated ion channels such as channelrhodopsin to control the activity of genetically defined subsets of neurons in vivo. In the context of a simple learning task, illumination of transfected cells in the somatosensory cortex influenced decision-making in mice.[52]
BCIs led to a deeper understanding of neural networks and the central nervous system. Research has reported that despite neuroscientists' inclination to believe that neurons have the most effect when working together, single neurons can be conditioned through the use of BCIs to fire in a pattern that allows primates to control motor outputs. BCIs led to development of the single neuron insufficiency principle that states that even with a well-tuned firing rate, single neurons can only carry limited information and therefore the highest level of accuracy is achieved by recording ensemble firings. Other principles discovered with BCIs include the neuronal multitasking principle, the neuronal mass principle, the neural degeneracy principle, and the plasticity principle.[53]
BCIs are proposed to be applied by users without disabilities. Passive BCIs allow for assessing and interpreting changes in the user state during Human-Computer Interaction (HCI). In a secondary, implicit control loop, the system adapts to its user, improving its usability.[54]
BCI systems can potentially be used to encode signals from the periphery. These sensory BCI devices enable real-time, behaviorally-relevant decisions based upon closed-loop neural stimulation.[55]
The BCI Award
[edit]The BCI Research Award is awarded annually in recognition of innovative research. Each year, a renowned research laboratory is asked to judge projects. The jury consists of BCI experts recruited by that laboratory. The jury selects twelve nominees, then chooses a first, second, and third-place winner, who receive awards of $3,000, $2,000, and $1,000, respectively.
Human research
[edit]Invasive BCIs
[edit]Invasive BCI requires surgery to implant electrodes under the scalp for accessing brain signals. The main advantage is to increase accuracy. Downsides include side effects from the surgery, including scar tissue that can obstruct brain signals or the body may not accept the implanted electrodes.[56]
Vision
[edit]Invasive BCI research has targeted repairing damaged sight and providing new functionality for people with paralysis. Invasive BCIs are implanted directly into the grey matter of the brain during neurosurgery. Because they lie in the grey matter, invasive devices produce the highest quality signals of BCI devices but are prone to scar-tissue build-up, causing the signal to weaken, or disappear, as the body reacts to the foreign object.[57]
In vision science, direct brain implants have been used to treat non-congenital (acquired) blindness. One of the first scientists to produce a working brain interface to restore sight was private researcher William Dobelle. Dobelle's first prototype was implanted into "Jerry", a man blinded in adulthood, in 1978. A single-array BCI containing 68 electrodes was implanted onto Jerry's visual cortex and succeeded in producing phosphenes, the sensation of seeing light. The system included cameras mounted on glasses to send signals to the implant. Initially, the implant allowed Jerry to see shades of grey in a limited field of vision at a low frame-rate. This also required him to be hooked up to a mainframe computer, but shrinking electronics and faster computers made his artificial eye more portable and now enable him to perform simple tasks unassisted.[58]
In 2002, Jens Naumann, also blinded in adulthood, became the first in a series of 16 paying patients to receive Dobelle's second generation implant, one of the earliest commercial uses of BCIs. The second generation device used a more sophisticated implant enabling better mapping of phosphenes into coherent vision. Phosphenes are spread out across the visual field in what researchers call "the starry-night effect". Immediately after his implant, Jens was able to use his imperfectly restored vision to drive an automobile slowly around the parking area of the research institute.[59] Dobelle died in 2004 before his processes and developments were documented, leaving no one to continue his work.[60] Subsequently, Naumann and the other patients in the program began having problems with their vision, and eventually lost their "sight" again.[61][62]
Movement
[edit]BCIs focusing on motor neuroprosthetics aim to restore movement in individuals with paralysis or provide devices to assist them, such as interfaces with computers or robot arms.
Kennedy and Bakay were first to install a human brain implant that produced signals of high enough quality to simulate movement. Their patient, Johnny Ray (1944–2002), developed 'locked-in syndrome' after a brain-stem stroke in 1997. Ray's implant was installed in 1998 and he lived long enough to start working with the implant, eventually learning to control a computer cursor; he died in 2002 of a brain aneurysm.[63]
Tetraplegic Matt Nagle became the first person to control an artificial hand using a BCI in 2005 as part of the first nine-month human trial of Cyberkinetics's BrainGate chip-implant. Implanted in Nagle's right precentral gyrus (area of the motor cortex for arm movement), the 96-electrode implant allowed Nagle to control a robotic arm by thinking about moving his hand as well as a computer cursor, lights and TV.[64] One year later, Jonathan Wolpaw received the Altran Foundation for Innovation prize for developing a Brain Computer Interface with electrodes located on the surface of the skull, instead of directly in the brain.[65]
Research teams led by the BrainGate group and another at University of Pittsburgh Medical Center, both in collaborations with the United States Department of Veterans Affairs (VA), demonstrated control of prosthetic limbs with many degrees of freedom using direct connections to arrays of neurons in the motor cortex of tetraplegia patients.[66][67]
Communication
[edit]In May 2021, a Stanford University team reported a successful proof-of-concept test that enabled a quadraplegic participant to produce English sentences at about 86 characters per minute and 18 words per minute. The participant imagined moving his hand to write letters, and the system performed handwriting recognition on electrical signals detected in the motor cortex, utilizing Hidden Markov models and recurrent neural networks.[68][69]
A 2021 study reported that a paralyzed patient was able to communicate 15 words per minute using a brain implant that analyzed vocal tract motor neurons.[70][49]
In a review article, authors wondered whether human information transfer rates can surpass that of language with BCIs. Language research has reported that information transfer rates are relatively constant across many languages. This may reflect the brain's information processing limit. Alternatively, this limit may be intrinsic to language itself, as a modality for information transfer.[71]
In 2023 two studies used BCIs with recurrent neural network to decode speech at a record rate of 62 words per minute and 78 words per minute.[72][73][74]
Technical challenges
[edit]There exist a number of technical challenges to recording brain activity with invasive BCIs. Advances in CMOS technology are pushing and enabling integrated, invasive BCI designs with smaller size, lower power requirements, and higher signal acquisition capabilities.[75] Invasive BCIs involve electrodes that penetrate brain tissue in an attempt to record action potential signals (also known as spikes) from individual, or small groups of, neurons near the electrode. The interface between a recording electrode and the electrolytic solution surrounding neurons has been modelled using the Hodgkin-Huxley model.[76][77]
Electronic limitations to invasive BCIs have been an active area of research in recent decades. While intracellular recordings of neurons reveal action potential voltages on the scale of hundreds of millivolts, chronic invasive BCIs rely on recording extracellular voltages which typically are three orders of magnitude smaller, existing at hundreds of microvolts.[78] Further adding to the challenge of detecting signals on the scale of microvolts is the fact that the electrode-tissue interface has a high capacitance at small voltages. Due to the nature of these small signals, for BCI systems that incorporate functionality onto an integrated circuit, each electrode requires its own amplifier and ADC, which convert analog extracellular voltages into digital signals.[78] Because a typical neuron action potential lasts for one millisecond, BCIs measuring spikes must have sampling rates ranging from 300 Hz to 5 kHz. Yet another concern is that invasive BCIs must be low-power, so as to dissipate less heat to surrounding tissue; at the most basic level more power is traditionally needed to optimize signal-to-noise ratio.[77] Optimal battery design is an active area of research in BCIs.[79]
Challenges existing in the area of material science are central to the design of invasive BCIs. Variations in signal quality over time have been commonly observed with implantable microelectrodes.[80][81] Optimal material and mechanical characteristics for long term signal stability in invasive BCIs has been an active area of research.[82] It has been proposed that the formation of glial scarring, secondary to damage at the electrode-tissue interface, is likely responsible for electrode failure and reduced recording performance.[83] Research has suggested that blood-brain barrier leakage, either at the time of insertion or over time, may be responsible for the inflammatory and glial reaction to chronic microelectrodes implanted in the brain.[83][84] As a result, flexible[85][86][87] and tissue-like designs[88][89] have been researched and developed to minimize foreign-body reaction by means of matching the Young's modulus of the electrode closer to that of brain tissue.[88]
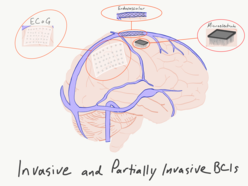
Partially invasive BCIs
[edit]Partially invasive BCI devices are implanted inside the skull but rest outside the brain rather than within the grey matter. They produce higher resolution signals than non-invasive BCIs where the bone tissue of the cranium deflects and deforms signals and have a lower risk of forming scar-tissue in the brain than fully invasive BCIs. Preclinical demonstration of intracortical BCIs from the stroke perilesional cortex has been conducted.[90]
Endovascular
[edit]A systematic review published in 2020 detailed multiple clinical and non-clinical studies investigating the feasibility of endovascular BCIs.[91]
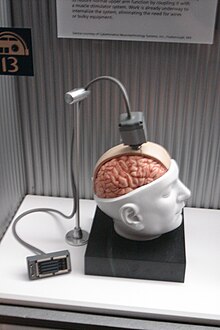
In 2010, researchers affiliated with University of Melbourne began developing a BCI that could be inserted via the vascular system. Australian neurologist Thomas Oxley conceived the idea for this BCI, called Stentrode, earning funding from DARPA. Preclinical studies evaluated the technology in sheep.[2]
Stentrode is a monolithic stent electrode array, is designed to be delivered via an intravenous catheter under image-guidance to the superior sagittal sinus, in the region which lies adjacent to the motor cortex.[92] This proximity enables Stentrode to measure neural activity. The procedure is most similar to how venous sinus stents are placed for the treatment of idiopathic intracranial hypertension.[93] Stentrode communicates neural activity to a battery-less telemetry unit implanted in the chest, which communicates wirelessly with an external telemetry unit capable of power and data transfer. While an endovascular BCI benefits from avoiding a craniotomy for insertion, risks such as clotting and venous thrombosis exist.
Human trials with Stentrode were underway as of 2021.[92] In November 2020, two participants with amyotrophic lateral sclerosis were able to wirelessly control an operating system to text, email, shop, and bank using direct thought using Stentrode,[94] marking the first time a brain-computer interface was implanted via the patient's blood vessels, eliminating the need for brain surgery. In January 2023, researchers reported no serious adverse events during the first year for all four patients, who could use it to operate computers.[95][96]
Electrocorticography
[edit]Electrocorticography (ECoG) measures brain electrical activity from beneath the skull in a way similar to non-invasive electroencephalography, using electrodes embedded in a thin plastic pad placed above the cortex, beneath the dura mater.[97] ECoG technologies were first trialled in humans in 2004 by Eric Leuthardt and Daniel Moran from Washington University in St. Louis. In a later trial, the researchers enabled a teenage boy to play Space Invaders.[98] This research indicates that control is rapid, requires minimal training, balancing signal fidelity and level of invasiveness.[note 1]
Signals can be either subdural or epidural, but are not taken from within the brain parenchyma. Patients are required to have invasive monitoring for localization and resection of an epileptogenic focus.[citation needed]
ECoG offers higher spatial resolution, better signal-to-noise ratio, wider frequency range, and less training requirements than scalp-recorded EEG, and at the same time has lower technical difficulty, lower clinical risk, and may have superior long-term stability than intracortical single-neuron recording.[100] This feature profile and evidence of the high level of control with minimal training requirements shows potential for real world application for people with motor disabilities.[101][102]
Edward Chang and Joseph Makin from UCSF reported that ECoG signals could be used to decode speech from epilepsy patients implanted with high-density ECoG arrays over the peri-Sylvian cortices.[103][104] They reported word error rates of 3% (a marked improvement from prior efforts) utilizing an encoder-decoder neural network, which translated ECoG data into one of fifty sentences composed of 250 unique words.
Non-invasive BCIs
[edit]Human experiments have used non-invasive neuroimaging interfaces. The majority of published BCI research involves noninvasive EEG-based BCIs. EEG-based technologies and interfaces have been used for the broadest variety of applications. Although EEG-based interfaces are easy to wear and do not require surgery, they have relatively poor spatial resolution and cannot effectively use higher-frequency signals because the skull interferes, dispersing and blurring the electromagnetic waves created by the neurons. EEG-based interfaces also require some time and effort prior to each usage session, while others require no prior-usage training. The choice of a specific BCI for a patient depends on numerous factors.
Functional near-infrared spectroscopy
[edit]In 2014, a BCI using functional near-infrared spectroscopy for "locked-in" patients with amyotrophic lateral sclerosis (ALS) was able to restore basic ability to communicate.[105]
Electroencephalography (EEG)-based brain-computer interfaces
[edit]
After Vidal stated the BCI challenge, the initial reports on non-invasive approaches included control of a cursor in 2D using VEP,[106] control of a buzzer using CNV,[107] control of a physical object, a robot, using a brain rhythm (alpha),[108] control of a text written on a screen using P300.[109][110]
In the early days of BCI research, another substantial barrier to using EEG was that extensive training ws required. For example, in experiments beginning in the mid-1990s, Niels Birbaumer at the University of Tübingen in Germany trained paralysed people to self-regulate the slow cortical potentials in their EEG to such an extent that these signals could be used as a binary signal to control a computer cursor. (Birbaumer had earlier trained epileptics to prevent impending fits by controlling this low voltage wave.) The experiment trained ten patients to move a computer cursor. The process was slow, requiring more than an hour for patients to write 100 characters with the cursor, while training often took months. The slow cortical potential approach has fallen away in favor of approaches that require little or no training, are faster and more accurate, and work for a greater proportion of users.[111]
Another research parameter is the type of oscillatory activity that is measured. Gert Pfurtscheller founded the BCI Lab 1991 and conducted the first online BCI based on oscillatory features and classifiers. Together with Birbaumer and Jonathan Wolpaw at New York State University they focused on developing technology that would allow users to choose the brain signals they found easiest to operate a BCI, including mu and beta rhythms.[citation needed]
A further parameter is the method of feedback used as shown in studies of P300 signals. Patterns of P300 waves are generated involuntarily (stimulus-feedback) when people see something they recognize and may allow BCIs to decode categories of thoughts without training.[citation needed]
A 2005 study reported EEG emulation of digital control circuits, using a CNV flip-flop.[112] A 2009 study reported noninvasive EEG control of a robotic arm using a CNV flip-flop.[113] A 2011 study reported control of two robotic arms solving Tower of Hanoi task with three disks using a CNV flip-flop.[114] A 2015 study described EEG-emulation of a Schmitt trigger, flip-flop, demultiplexer, and modem.[115]
Advances by Bin He and his team at University of Minnesota suggest the potential of EEG-based brain-computer interfaces to accomplish tasks close to invasive brain-computer interfaces. Using advanced functional neuroimaging including BOLD functional MRI and EEG source imaging, They identified the co-variation and co-localization of electrophysiological and hemodynamic signals.[116] Refined by a neuroimaging approach and a training protocol, They fashioned a non-invasive EEG based brain-computer interface to control the flight of a virtual helicopter in 3-dimensional space, based upon motor imagination.[117] In June 2013 they announced a technique to guide a remote-control helicopter through an obstacle course.[118] They also solved the EEG inverse problem and then used the resulting virtual EEG for BCI tasks. Well-controlled studies suggested the merits of such a source analysis-based BCI.[119]
A 2014 study reported that severely motor-impaired patients could communicate faster and more reliably with non-invasive EEG BCI than with muscle-based communication channels.[120]
A 2019 study reported that the application of evolutionary algorithms could improve EEG mental state classification with a non-invasive Muse device, enabling classification of data acquired by a consumer-grade sensing device.[121]
In a 2021 systematic review of randomized controlled trials using BCI for post-stroke upper-limb rehabilitation, EEG-based BCI was reported to have efficacy in improving upper-limb motor function compared to control therapies. More specifically, BCI studies that utilized band power features, motor imagery, and functional electrical stimulation were reported to be more effective than alternatives.[122] Another 2021 systematic review focused on post-stroke robot-assisted EEG-based BCI for hand rehabilitation. Improvement in motor assessment scores was observed in three of eleven studies.[123]
Dry active electrode arrays
[edit]In the early 1990s Babak Taheri, at University of California, Davis demonstrated the first single and multichannel dry active electrode arrays.[124] The arrayed electrode was demonstrated to perform well compared to silver/silver chloride electrodes. The device consisted of four sensor sites with integrated electronics to reduce noise by impedance matching. The advantages of such electrodes are:
- no electrolyte used,
- no skin preparation,
- significantly reduced sensor size,
- compatibility with EEG monitoring systems.
The active electrode array is an integrated system containing an array of capacitive sensors with local integrated circuitry packaged with batteries to power the circuitry. This level of integration was required to achieve the result.
The electrode was tested on a test bench and on human subjects in four modalities, namely:
- spontaneous EEG,
- sensory event-related potentials,
- brain stem potentials,
- cognitive event-related potentials.
Performance compared favorably with that of standard wet electrodes in terms of skin preparation, no gel requirements (dry), and higher signal-to-noise ratio.[125]
In 1999 Hunter Peckham and others at Case Western Reserve University used a 64-electrode EEG skullcap to return limited hand movements to a quadriplegic. As he concentrated on simple but opposite concepts like up and down. A basic pattern was identified in his beta-rhythm EEG output and used to control a switch: Above average activity was interpreted as on, below average off. The signals were also used to drive nerve controllers embedded in his hands, restoring some movement.[126]
SSVEP mobile EEG BCIs
[edit]In 2009, the NCTU Brain-Computer-Interface-headband was reported. Those researchers also engineered silicon-based microelectro-mechanical system (MEMS) dry electrodes designed for application to non-hairy body sites. These electrodes were secured to the headband's DAQ board with snap-on electrode holders. The signal processing module measured alpha activity and transferred it over Bluetooth to a phone that assessed the patients' alertness and cognitive capacity. When the subject became drowsy, the phone sent arousing feedback to the operator to rouse them.[127]
In 2011, researchers reported a cellular based BCI that could cause phone to ring. The wearable system was composed of a four channel bio-signal acquisition/amplification module, a communication module, and a Bluetooth phone. The electrodes were placed to pick up steady state visual evoked potentials (SSVEPs).[128] SSVEPs are electrical responses to flickering visual stimuli with repetition rates over 6 Hz[128] that are best found in the parietal and occipital scalp regions of the visual cortex.[129][130][131] It was reported that all study participants were able to initiate the phone call with minimal practice in natural environments.[132]
The scientists reported that a single channel fast Fourier transform (FFT) and multiple channel system canonical correlation analysis (CCA) algorithm can support mobile BCIs.[128][133] The CCA algorithm has been applied in experiments investigating BCIs with claimed high accuracy and speed.[134] Cellular BCI technology can reportedly be translated for other applications, such as picking up sensorimotor mu/beta rhythms to function as a motor-imagery based BCI.[128]
In 2013, comparative tests performed on Android cell phone, tablet, and computer based BCIs, analyzed the power spectrum density of resultant EEG SSVEPs. The stated goals of this study were to "increase the practicability, portability, and ubiquity of an SSVEP-based BCI, for daily use". It was reported that the stimulation frequency on all mediums was accurate, although the phone's signal was not stable. The amplitudes of the SSVEPs for the laptop and tablet were reported to be larger than those of the cell phone. These two qualitative characterizations were suggested as indicators of the feasibility of using a mobile stimulus BCI.[133]
One of the difficulties with EEG readings is susceptibility to motion artifacts.[135] In most research projects, the participants were asked to sit still in a laboratory setting, reducing head and eye movements as much as possible. However, since these initiatives were intended to create a mobile device for daily use,[133] the technology had to be tested in motion. In 2013, researchers tested mobile EEG-based BCI technology, measuring SSVEPs from participants as they walked on a treadmill. Reported results were that as speed increased, SSVEP detectability using CCA decreased. Independent component analysis (ICA) had been shown to be efficient in separating EEG signals from noise.[136] The researchers stated that CCA data with and without ICA processing were similar. They concluded that CCA demonstrated robustness to motion artifacts.[130] EEG-based BCI applications offer low spatial resolution. Possible solutions include: EEG source connectivity based on graph theory, EEG pattern recognition based on Topomap and EEG-fMRI fusion.
Prosthesis and environment control
[edit]Non-invasive BCIs have been applied to prosthetic upper and lower extremity devices in people with paralysis. For example, Gert Pfurtscheller of Graz University of Technology and colleagues demonstrated a BCI-controlled functional electrical stimulation system to restore upper extremity movements in a person with tetraplegia due to spinal cord injury.[137] Between 2012 and 2013, researchers at University of California, Irvine demonstrated for the first time that BCI technology can restore brain-controlled walking after spinal cord injury. In their study, a person with paraplegia operated a BCI-robotic gait orthosis to regain basic ambulation.[138][139] In 2009 independent researcher Alex Blainey used the Emotiv EPOC to control a 5 axis robot arm.[140] He made several demonstrations of mind controlled wheelchairs and home automation.
Magnetoencephalography and fMRI
[edit]
Magnetoencephalography (MEG) and functional magnetic resonance imaging (fMRI) have both been used as non-invasive BCIs.[141] In a widely reported experiment, fMRI allowed two users to play Pong in real-time by altering their haemodynamic response or brain blood flow through biofeedback.[142]
fMRI measurements of haemodynamic responses in real time have also been used to control robot arms with a seven-second delay between thought and movement.[143]
In 2008 research developed in the Advanced Telecommunications Research (ATR) Computational Neuroscience Laboratories in Kyoto, Japan, allowed researchers to reconstruct images from brain signals at a resolution of 10x10 pixels.[144]
A 2011 study reported second-by-second reconstruction of videos watched by the study's subjects, from fMRI data.[145] This was achieved by creating a statistical model relating videos to brain activity. This model was then used to look up 100 one-second video segments, in a database of 18 million seconds of random YouTube videos, matching visual patterns to brain activity recorded when subjects watched a video. These 100 one-second video extracts were then combined into a mash-up image that resembled the video.[146][147][148]
BCI control strategies in neurogaming
[edit]Motor imagery
[edit]Motor imagery involves imagining the movement of body parts, activating the sensorimotor cortex, which modulates sensorimotor oscillations in the EEG. This can be detected by the BCI and used to infer user intent. Motor imagery typically requires training to acquire acceptable control. Training sessions typically consume hours over several days. Regardless of the duration of the training session, users are unable to master the control scheme. This results in very slow pace of the gameplay.[149] Machine learning methods were used to compute a subject-specific model for detecting motor imagery performance. The top performing algorithm from BCI Competition IV in 2022[150] dataset 2 for motor imagery was the Filter Bank Common Spatial Pattern, developed by Ang et al. from A*STAR, Singapore.[151]
Bio/neurofeedback for passive BCI designs
[edit]Biofeedback can be used to monitor a subject's mental relaxation. In some cases, biofeedback does not match EEG, while parameters such as electromyography (EMG), galvanic skin resistance (GSR), and heart rate variability (HRV) can do so. Many biofeedback systems treat disorders such as attention deficit hyperactivity disorder (ADHD), sleep problems in children, teeth grinding, and chronic pain. EEG biofeedback systems typically monitor four brainwave bands (theta: 4–7 Hz, alpha:8–12 Hz, SMR: 12–15 Hz, beta: 15–18 Hz) and challenge the subject to control them. Passive BCI uses BCI to enrich human–machine interaction with information on the user's mental state, for example, simulations that detect when users intend to push brakes during emergency vehicle braking.[54] Game developers using passive BCIs understand that through repetition of game levels the user's cognitive state adapts. During the first play of a given level, the player reacts differently than during subsequent plays: for example, the user is less surprised by an event that they expect.[149]
Visual evoked potential (VEP)
[edit]A VEP is an electrical potential recorded after a subject is presented with a visual stimuli. The types of VEPs include SSVEPs and P300 potential.
Steady-state visually evoked potentials (SSVEPs) use potentials generated by exciting the retina, using visual stimuli modulated at certain frequencies. SSVEP stimuli are often formed from alternating checkerboard patterns and at times use flashing images. The frequency of the phase reversal of the stimulus used can be distinguished by EEG; this makes detection of SSVEP stimuli relatively easy. SSVEP is used within many BCI systems. This is due to several factors. The signal elicited is measurable in as large a population as the transient VEP and blink movement. Electrocardiographic artefacts do not affect the frequencies monitored. The SSVEP signal is robust; the topographic organization of the primary visual cortex is such that a broader area obtains afferents from the visual field's central or fovial region. SSVEP comes with problems. As SSVEPs use flashing stimuli to infer user intent, the user must gaze at one of the flashing or iterating symbols in order to interact with the system. It is, therefore, likely that the symbols become irritating and uncomfortable during longer play sessions.
Another type of VEP is the P300 potential. This potential is a positive peak in the EEG that occurs roughly 300 ms after the appearance of a target stimulus (a stimulus for which the user is waiting or seeking) or oddball stimuli. P300 amplitude decreases as the target stimuli and the ignored stimuli grow more similar. P300 is thought to be related to a higher level attention process or an orienting response. Using P300 requires fewer training sessions. The first application to use it was the P300 matrix. Within this system, a subject chooses a letter from a 6 by 6 grid of letters and numbers. The rows and columns of the grid flashed sequentially and every time the selected "choice letter" was illuminated the user's P300 was (potentially) elicited. However, the communication process, at approximately 17 characters per minute, was slow. P300 offers a discrete selection rather than continuous control. The advantage of P300 within games is that the player does not have to learn how to use a new control system, requiring only short training instances to learn gameplay mechanics and the basic BCI paradigm.[149]
Non-brain-based human–computer interface (physiological computing)
[edit]Human-computer interaction can exploit other recording modalities, such as electrooculography and eye-tracking. These modalities do not record brain activity and therefore do not qualify as BCIs.[152]
Electrooculography (EOG)
[edit]In 1989, a study reported control of a mobile robot by eye movement using electrooculography signals. A mobile robot was driven to a goal point using five EOG commands, interpreted as forward, backward, left, right, and stop.[153]
Pupil-size oscillation
[edit]A 2016 article described a new non-EEG-based HCI that required no visual fixation, or ability to move the eyes.[154] The interface is based on covert interest; directing attention to a chosen letter on a virtual keyboard, without the need to look directly at the letter. Each letter has its own (background) circle which micro-oscillates in brightness differently from the others. Letter selection is based on best fit between unintentional pupil-size oscillation and the background circle's brightness oscillation pattern. Accuracy is additionally improved by the user's mental rehearsal of the words 'bright' and 'dark' in synchrony with the brightness transitions of the letter's circle.
Brain-to-brain communication
[edit]In the 1960s a researcher after training used EEG to create Morse code using alpha waves.[155] On 27 February 2013 Miguel Nicolelis's group at Duke University and IINN-ELS connected the brains of two rats, allowing them to share information, in the first-ever direct brain-to-brain interface.[156][157][158]
Gerwin Schalk reported that ECoG signals can discriminate vowels and consonants embedded in spoken and imagined words, shedding light on the mechanisms associated with their production and could provide a basis for brain-based communication using imagined speech.[102][159]
In 2002 Kevin Warwick had an array of 100 electrodes fired into his nervous system in order to link his nervous system to the Internet. Warwick carried out a series of experiments. Electrodes were implanted into his wife's nervous system, allowing them to conduct the first direct electronic communication experiment between the nervous systems of two humans.[160][161][162][163]
Other researchers achieved brain-to-brain communication between at a distance using non-invasive technology attached to the participants' scalps. The words were encoded in binary streams by the cognitive motor input of the person sending the information. Pseudo-random bits of the information carried encoded words "hola" ("hi" in Spanish) and "ciao" ("goodbye" in Italian) and were transmitted mind-to-mind.[164]
Cell-culture BCIs
[edit]
Researchers have built devices to interface with neural cells and entire neural networks in vitro. Experiments on cultured neural tissue focused on building problem-solving networks, constructing basic computers and manipulating robotic devices. Research into techniques for stimulating and recording individual neurons grown on semiconductor chips is neuroelectronics or neurochips.[165]
Development of the first neurochip was claimed by a Caltech team led by Jerome Pine and Michael Maher in 1997.[166] The Caltech chip had room for 16 neurons.
In 2003 a team led by Theodore Berger, at the University of Southern California, worked on a neurochip designed to function as an artificial or prosthetic hippocampus. The neurochip was designed for rat brains. The hippocampus was chosen because it is thought to be the most structured and most studied part of the brain. Its function is to encode experiences for storage as long-term memories elsewhere in the brain.[167]
In 2004 Thomas DeMarse at the University of Florida used a culture of 25,000 neurons taken from a rat's brain to fly a F-22 fighter jet aircraft simulator. After collection, the cortical neurons were cultured in a petri dish and reconnected themselves to form a living neural network. The cells were arranged over a grid of 60 electrodes and used to control the pitch and yaw functions of the simulator. The study's focus was on understanding how the human brain performs and learns computational tasks at a cellular level.[168]
Collaborative BCIs
[edit]The idea of combining/integrating brain signals from multiple individuals was introduced at Humanity+ @Caltech, in December 2010, by Adrian Stoica, who referred to the concept as multi-brain aggregation.[169][170][171] A patent was applied for in 2012.[172][173][174] Stoica's first paper on the topic appeared in 2012, after the publication of his patent application.[175]
Ethical considerations
[edit]BCIs present significant ethical questions, including concerns about privacy, autonomy, consent, and the consequences of merging human cognition with external devices. Exploring these ethical considerations highlights the complex interplay between advancing technology and preserving fundamental human rights and values. The concerns can be broadly categorized into user-centric issues and legal and social issues.
Concerns center on the safety and long-term effects on users. These include obtaining informed consent from individuals with communication difficulties, the impact on patients' and families' quality of life, health-related side effects, misuse of therapeutic applications, safety risks, and the non-reversible nature of some BCI-induced changes. Additionally, questions arise about access to maintenance, repair, and spare parts, particularly in the event of a company's bankruptcy[176]
The legal and social aspects of BCIs complicate mainstream adoption. Concerns include issues of accountability and responsibility, such as claims that BCI influence overrides free will and control over actions, inaccurate translation of cognitive intentions, personality changes resulting from deep-brain stimulation, and the blurring of the line between human and machine.[177] Other concerns involve the use of BCIs in advanced interrogation techniques, unauthorized access ("brain hacking"),[178] social stratification through selective enhancement, privacy issues related to mind-reading, tracking and "tagging" systems, and the potential for mind, movement, and emotion control.[179] Researchers have also theorized that BCIs could exacerbate existing social inequalities.
In their current form, most BCIs are more akin to corrective therapies that engage few of such ethical issues. Bioethics is well-equipped to address the challenges posed by BCI technologies, with Clausen suggesting in 2009 that "BCIs pose ethical challenges, but these are conceptually similar to those that bioethicists have addressed for other realms of therapy."[180] Haselager and colleagues highlighted the importance of managing expectations and value.[181] Standard protocols can ensure ethically sound informed-consent procedures for locked-in patients.
The evolution of BCIs mirrors that of pharmaceutical science, which began as a means to address impairments and now enhances focus and reduces the need for sleep. As BCIs progress from therapies to enhancements, the BCI community is working to create consensus on ethical guidelines for research, development, and dissemination.[182][183] Ensuring equitable access to BCIs will be crucial in preventing generational inequalities that could hinder the right to human flourishing.
Low-cost systems
[edit]Various companies are developing inexpensive BCIs for research and entertainment. Toys such as the NeuroSky and Mattel MindFlex have seen some commercial success.
- In 2006, Sony patented a neural interface system allowing radio waves to affect signals in the neural cortex.[184]
- In 2007, NeuroSky released the first affordable consumer based EEG along with the game NeuroBoy. It was the first large scale EEG device to use dry sensor technology.[185]
- In 2008, OCZ Technology developed a device for use in video games relying primarily on electromyography.[186]
- In 2008, Final Fantasy developer Square Enix announced that it was partnering with NeuroSky to create Judecca, a game.[187][188]
- In 2009, Mattel partnered with NeuroSky to release Mindflex, a game that used an EEG to steer a ball through an obstacle course. It was by far the best selling consumer based EEG at the time.[187][189]
- In 2009, Uncle Milton Industries partnered with NeuroSky to release the Star Wars Force Trainer, a game designed to create the illusion of possessing the Force.[187][190]
- In 2009, Emotiv released the EPOC, a 14 channel EEG device that can read 4 mental states, 13 conscious states, facial expressions, and head movements. The EPOC was the first commercial BCI to use dry sensor technology, which can be dampened with a saline solution for a better connection.[191]
- In November 2011, Time magazine selected "necomimi" produced by Neurowear as one of the year's best inventions.[192]
- In February 2014, They Shall Walk (a nonprofit organization fixed on constructing exoskeletons, dubbed LIFESUITs, for paraplegics and quadriplegics) began a partnership with James W. Shakarji on the development of a wireless BCI.[193]
- In 2016, a group of hobbyists developed an open-source BCI board that sends neural signals to the audio jack of a smartphone, dropping the cost of entry-level BCI to £20.[194] Basic diagnostic software is available for Android devices, as well as a text entry app for Unity.[195]
- In 2020, NextMind released a dev kit including an EEG headset with dry electrodes at $399.[196][197] The device can run various visual-BCI demonstration applications or developers can create their own. It was later acquired by Snap Inc. in 2022.[198]
Future directions
[edit]
A consortium of 12 European partners completed a roadmap to support the European Commission in their funding decisions for the Horizon 2020 framework program. The project was funded by the European Commission. It started in November 2013 and published a roadmap in April 2015.[199] A 2015 publication describes this project, as well as the Brain-Computer Interface Society.[200] It reviewed work within this project that further defined BCIs and applications, explored recent trends, discussed ethical issues, and evaluated directions for new BCIs.
Other recent publications too have explored future BCI directions for new groups of disabled users.[10][201]
Disorders of consciousness (DOC)
[edit]Some people have a disorder of consciousness (DOC). This state is defined to include people in a coma and those in a vegetative state (VS) or minimally conscious state (MCS). BCI research seeks to address DOC. A key initial goal is to identify patients who can perform basic cognitive tasks, which would change their diagnosis, and allow them to make important decisions (such as whether to seek therapy, where to live, and their views on end-of-life decisions regarding them). Patients incorrectly diagnosed may die as a result of end-of-life decisions made by others. The prospect of using BCI to communicate with such patients is a tantalizing prospect.[202][203]
Many such patients cannot use BCIs based on vision. Hence, tools must rely on auditory and/or vibrotactile stimuli. Patients may wear headphones and/or vibrotactile stimulators placed on responsive body parts. Another challenge is that patients may be able to communicate only at unpredictable intervals. Home devices can allow communications when the patient is ready.
Automated tools can ask questions that patients can easily answer, such as "Is your father named George?" or "Were you born in the USA?" Automated instructions inform patients how to coney yes or no, for example by focusing their attention on stimuli on the right vs. left wrist. This focused attention produces reliable changes in EEG patterns that can help determine whether the patient is able to communicate.[204][205][206]
Motor recovery
[edit]People may lose some of their ability to move due to many causes, such as stroke or injury. Research in recent years has demonstrated the utility of EEG-based BCI systems in aiding motor recovery and neurorehabilitation in patients who have had a stroke.[207][208][209][210] Several groups have explored systems and methods for motor recovery that include BCIs.[211][212][213][214] In this approach, a BCI measures motor activity while the patient imagines or attempts movements as directed by a therapist. The BCI may provide two benefits: (1) if the BCI indicates that a patient is not imagining a movement correctly (non-compliance), then the BCI could inform the patient and therapist; and (2) rewarding feedback such as functional stimulation or the movement of a virtual avatar also depends on the patient's correct movement imagery.
До сих пор BCI для восстановления моторики полагались на ЭЭГ для измерения двигательных представлений пациента. Тем не менее, исследования также использовали фМРТ для изучения различных изменений в мозге, когда люди проходят курс реабилитации после инсульта на основе BCI. [215] [216] [217] Визуализирующие исследования в сочетании с системами BCI на основе ЭЭГ обещают изучить нейропластичность во время восстановления моторики после инсульта. [217] Будущие системы могут включать в себя фМРТ и другие средства контроля в реальном времени, такие как функциональный ближний инфракрасный диапазон, возможно, в тандеме с ЭЭГ. Неинвазивная стимуляция мозга также изучалась в сочетании с BCI для восстановления моторики. [218] В 2016 году ученые из Мельбурнского университета опубликовали данные доклинической проверки концепции, связанные с потенциальной технологической платформой интерфейса мозг-компьютер, разрабатываемой для пациентов с параличом, чтобы облегчить управление внешними устройствами, такими как роботизированные конечности, компьютеры и экзоскелеты, путем перевода мозговая деятельность. [219] [220] [221]
Функциональное картирование мозга
[ редактировать ]В 2014 году около 400 000 человек прошли картирование мозга во время нейрохирургии. Эта процедура часто требуется людям, которые не реагируют на лекарства . [222] Во время этой процедуры на мозг накладываются электроды, позволяющие точно определить расположение структур и функциональных зон. Пациенты могут бодрствовать во время нейрохирургии, и их просят выполнять какие-то действия, например, двигать пальцами или повторять слова. Это необходимо для того, чтобы хирурги могли удалить нужную ткань, не затрагивая другие области. Удаление слишком большого количества ткани головного мозга может привести к необратимому повреждению, а удаление слишком малого количества может потребовать дополнительной нейрохирургии. [ нужна ссылка ]
Исследователи изучали способы улучшения нейрохирургического картирования. В этой работе основное внимание уделяется высокой гамма-активности, которую трудно обнаружить неинвазивным путем. Результаты усовершенствовали методы определения ключевых функциональных областей. [223]
Гибкие устройства
[ редактировать ]Гибкая электроника — это полимеры или другие гибкие материалы (например , шелк , [224] пентацен , ПДМС , парилен , полиимид [225] ) напечатан со схемой ; гибкость позволяет электронике сгибаться. Технология изготовления, использованная для создания этих устройств, напоминает технологию, используемую для создания интегральных схем и микроэлектромеханических систем (МЭМС). [ нужна ссылка ]
Гибкие нейронные интерфейсы могут свести к минимуму травму тканей головного мозга, связанную с механическим несоответствием между электродом и тканью. [226]
Нейронная пыль
[ редактировать ]Нейронная пыль — это устройства размером в миллиметр, работающие как нервные датчики с беспроводным питанием , которые были предложены в статье 2011 года Центра беспроводных исследований Калифорнийского университета в Беркли . [227] [228] В одной модели потенциалы локального поля можно было отличить от «всплесков» потенциала действия , которые давали бы значительно более разнообразные данные по сравнению с традиционными методами. [227]
См. также
[ редактировать ]- Информатика
- Интендикс (2009)
- AlterEgo — система, которая считывает невысказанные фразы и реагирует с помощью наушников с костной проводимостью.
- Расширенное обучение
- Биологическая машина
- Кортикальные имплантаты
- Глубокая стимуляция мозга
- Человеческие чувства
- Опытная машина
- Кернел (нейротехнологическая компания)
- Обнаружение лжи
- Слуховой эффект микроволновой печи
- Нейронная инженерия
- Нейралинк
- Нейробототехника
- Нейростимуляция
- Ноотропный
- Прецизионная нейронаука
- Проект Киборг
- Имитированная реальность
- Регистрирующая матрица стент-электродов
- Телеприсутствие
- Идентификация мыслей
- Компьютер с программным обеспечением (использует аналогичную технологию для ввода-вывода)
- Эмуляция всего мозга
- Wirehead (научная фантастика)
Примечания
[ редактировать ]Ссылки
[ редактировать ]- ^ Перейти обратно: а б Крукофф М.О., Рахимпур С., Слуцки М.В., Эдгертон В.Р., Тернер Д.А. (2016). «Улучшение восстановления нервной системы с помощью нейробиопрепаратов, тренировки нейронного интерфейса и нейрореабилитации» . Границы в неврологии . 10 : 584. дои : 10.3389/fnins.2016.00584 . ПМК 5186786 . ПМИД 28082858 .
- ^ Перейти обратно: а б Мартини, Майкл Л.; Эрманн, Эрик Карл; Опи, Николас Л.; Панов, Федор; Оксли, Томас; Ягер, Курт (февраль 2020 г.). «Сенсорные модальности для технологии интерфейса мозг-компьютер: комплексный обзор литературы» . Нейрохирургия . 86 (2): E108–E117. дои : 10.1093/neuros/nyz286 . ISSN 0148-396X . ПМИД 31361011 .
- ^ Перейти обратно: а б Видал Джей-Джей (1973). «На пути к прямой связи мозг-компьютер» . Ежегодный обзор биофизики и биоинженерии . 2 (1): 157–180. дои : 10.1146/annurev.bb.02.060173.001105 . ПМИД 4583653 .
- ^ Перейти обратно: а б Видал Дж (1977). «Обнаружение событий мозга на ЭЭГ в реальном времени». Труды IEEE . 65 (5): 633–641. дои : 10.1109/PROC.1977.10542 . S2CID 7928242 .
- ^ Левин С.П., Хаггинс Дж.Э., БеМент С.Л., Кушваха Р.К., Шух Л.А., Роде М.М. и др. (июнь 2000 г.). «Прямой мозговой интерфейс, основанный на потенциалах, связанных с событиями». Транзакции IEEE по реабилитационной технике . 8 (2): 180–185. дои : 10.1109/86.847809 . ПМИД 10896180 .
- ^ Бёрд Джей-Джей, Мансо Л.Дж., Рибейро Э.П., Экарт А., Фариа Д.Р. (сентябрь 2018 г.). Исследование классификации психических состояний с использованием интерфейса «мозг-машина» на основе ЭЭГ . Остров Мадейра, Португалия: 9-я международная конференция по интеллектуальным системам 2018 . Проверено 3 декабря 2018 г.
- ^ Берд Джей-Джей, Экарт А, Букингемский компакт-диск, Фариа ДР (2019). Классификация психических эмоциональных настроений с помощью мозго-машинного интерфейса на основе ЭЭГ . Колледж Святого Хью, Оксфордский университет, Великобритания: Международная конференция по цифровой обработке изображений и сигналов (DISP'19). Архивировано из оригинала 3 декабря 2018 года . Проверено 3 декабря 2018 г.
- ^ Ваннесте С., Сонг Джей Джей, Де Риддер Д. (март 2018 г.). «Таламокортикальная аритмия, обнаруженная с помощью машинного обучения» . Природные коммуникации . 9 (1): 1103. Бибкод : 2018NatCo...9.1103V . дои : 10.1038/s41467-018-02820-0 . ПМЦ 5856824 . ПМИД 29549239 .
- ^ Штребель В. , Тобен В. (2014). «Музыка Элвина Люсьера для сольного исполнителя: экспериментальная музыка за пределами озвучивания» . Организованный звук . 19 (1): 17–29. дои : 10.1017/S135577181300037X . S2CID 62506825 .
- ^ Перейти обратно: а б Уолпоу, младший и Уолпоу, EW (2012). «Интерфейсы мозг-компьютер: что-то новое под солнцем». В: Интерфейсы «мозг-компьютер: принципы и практика» , Уолпоу, Дж. Р. и Уолпоу (ред.), EW Oxford University Press.
- ^ Уолпоу-младший, Бирбаумер Н., Макфарланд DJ, Пфурчеллер Г., Воган Т.М. (июнь 2002 г.). «Мозг-компьютерные интерфейсы связи и управления». Клиническая нейрофизиология . 113 (6): 767–791. дои : 10.1016/s1388-2457(02)00057-3 . ПМИД 12048038 . S2CID 17571592 .
- ^ Эллисон Б.З., Уолпоу Е.В., Уолпоу-младший (июль 2007 г.). «Системы интерфейса мозг-компьютер: прогресс и перспективы». Экспертиза медицинских изделий . 4 (4): 463–474. дои : 10.1586/17434440.4.4.463 . ПМИД 17605682 . S2CID 4690450 .
- ^ Божиновский С, Божиновская Л (2019). «Интерфейс мозг-компьютер в Европе: тридцатый юбилей» . Автоматика . 60 (1): 36–47. дои : 10.1080/00051144.2019.1570644 .
- ^ Видаль, Жак Ж. (1977). «Обнаружение событий мозга на ЭЭГ в реальном времени» (PDF) . Труды IEEE . 65 (5): 633–641. дои : 10.1109/PROC.1977.10542 . S2CID 7928242 . Архивировано из оригинала (PDF) 19 июля 2015 года . Проверено 4 ноября 2022 г.
- ^ С. Божиновски, М. Сестаков, Л. Бозиновска: Использование альфа-ритма ЭЭГ для управления мобильным роботом, В книге Г. Харриса, К. Уокера (ред.) Proc. Ежегодная конференция IEEE Медицинского и биологического общества , с. 1515–1516, Новый Орлеан, 1988 г.
- ^ С. Бозиновский: Управление траекторией мобильного робота: от фиксированных рельсов к прямому биоэлектрическому управлению, В О. Кайнаке (ред.) Proc. Семинар IEEE по интеллектуальному управлению движением , стр. 63–67, Стамбул, 1990 г.
- ^ М. Лебедев: Увеличение сенсомоторных функций с помощью нейронных протезов. Опера медика и физиологика. Том. 2 (3): 211-227, 2016
- ^ М. Лебедев, М. Николелис: Интерфейсы мозг-машина: от фундаментальной науки до нейропротезов и нейрореабилитации, Физиологическое обозрение 97: 737-867, 2017
- ^ Л. Божиновска, Г. Стоянов, М. Сестаков, С. Божиновский: Распознавание образов CNV: шаг к наблюдению когнитивных волн, В Л. Торресе, Э. Масграу, Э. Лагунасе (ред.) Обработка сигналов V: Теории и приложения, Учеб. EUSIPCO-90: Пятая Европейская конференция по обработке сигналов, Elsevier, стр. 1659–1662, Барселона, 1990 г.
- ^ Л. Божиновска, С. Божиновски, Г. Стоянов, Электроэкспектограмма: экспериментальный дизайн и алгоритмы, В материалах IEEE International Biomedical Engineering Days, стр. 55–60, Стамбул, 1992 г.
- ^ Миранда Р.А., Кейсбир В.Д., Хейн А.М., Джуди Дж.В., Кротков Е.П., Лаабс Т.Л. и др. (апрель 2015 г.). «Усилия, финансируемые DARPA, по разработке новых технологий интерфейса мозг-компьютер» . Журнал методов нейробиологии . 244 : 52–67. дои : 10.1016/j.jneumeth.2014.07.019 . ПМИД 25107852 . S2CID 14678623 .
- ^ Джейкобс М., Премджи А., Нельсон А.Дж. (16 мая 2012 г.). «Протоколы ТМС, индуцирующие пластичность, для исследования соматосенсорного контроля функции рук» . Нейронная пластичность . 2012 : 350574. doi : 10.1155/2012/350574 . ПМЦ 3362131 . ПМИД 22666612 .
- ^ Фокс, Мэгги (13 октября 2016 г.). «Мозговой чип помогает парализованному человеку чувствовать пальцы» . Новости Эн-Би-Си . Проверено 23 марта 2021 г.
- ^ Шляпник, Тейлор (10 июля 2017 г.). «DARPA выделяет 65 миллионов долларов на разработку идеального крошечного двустороннего интерфейса «мозг-компьютер» . Технический кризис . Проверено 23 марта 2021 г.
- ^ Стейси, Кевин (10 июля 2017 г.). «Браун получит до 19 миллионов долларов на разработку интерфейса мозг-компьютер следующего поколения» . Университет Брауна . Проверено 23 марта 2021 г.
- ^ «Минимально инвазивный «Стентрод» демонстрирует потенциал в качестве нейронного интерфейса для мозга» . Агентство перспективных оборонных исследовательских проектов (DARPA) . 8 февраля 2016 года . Проверено 23 марта 2021 г.
- ^ «Кохлеарный имплант» . Национальный институт глухоты и других коммуникативных расстройств . Февраль 2016 года . Проверено 1 апреля 2024 г.
- ^ Мигель Николелис и др. (2001) Нейробиолог Дьюка разработал систему, которая позволяет обезьянам управлять руками робота с помощью сигналов мозга. Архивировано 19 декабря 2008 года в Wayback Machine.
- ^ Баум М. (6 сентября 2008 г.). «Обезьяна использует силу мозга, чтобы прокормить себя с помощью роботизированной руки» . Питт Хроника. Архивировано из оригинала 10 сентября 2009 года . Проверено 6 июля 2009 г.
- ^ Льюис Т. (ноябрь 2020 г.). «Имплантату свиного мозга Илона Маска еще далеко до решения паралича » . Научный американец . Проверено 23 марта 2021 г.
- ^ Шид С. (февраль 2021 г.). «Илон Маск говорит, что его стартап Neuralink подключил обезьяну к тому, чтобы она могла играть в видеоигры, используя свой разум» . CNBC . Проверено 23 марта 2021 г.
- ^ Фец Э.Э. (февраль 1969 г.). «Оперантное обусловливание деятельности корковых подразделений». Наука . 163 (3870): 955–958. Бибкод : 1969Sci...163..955F . дои : 10.1126/science.163.3870.955 . ПМИД 4974291 . S2CID 45427819 .
- ^ Шмидт Э.М., Макинтош Дж.С., Дурелли Л., Бак М.Дж. (сентябрь 1978 г.). «Точный контроль оперантно-обусловленных импульсов корковых нейронов». Экспериментальная неврология . 61 (2): 349–369. дои : 10.1016/0014-4886(78)90252-2 . ПМИД 101388 . S2CID 37539476 .
- ^ Георгопулос А.П., Лурито Дж.Т., Петридес М., Шварц А.Б., Мэсси Дж.Т. (январь 1989 г.). «Ментальное вращение вектора популяции нейронов». Наука . 243 (4888): 234–236. Бибкод : 1989Sci...243..234G . дои : 10.1126/science.2911737 . ПМИД 2911737 . S2CID 37161168 .
- ^ Стэнли ГБ, Ли ФФ, Дэн Ю (сентябрь 1999 г.). «Реконструкция природных сцен по ансамблевым реакциям латерального коленчатого ядра» . Журнал неврологии . 19 (18): 8036–8042. doi : 10.1523/JNEUROSCI.19-18-08036.1999 . ПМК 6782475 . ПМИД 10479703 .
- ^ Вессберг Дж., Стамбо Ч.Р., Кралик Дж.Д., Бек П.Д., Лаубах М., Чапин Дж.К. и др. (ноябрь 2000 г.). «Прогнозирование траектории руки в реальном времени ансамблями корковых нейронов у приматов». Природа . 408 (6810): 361–365. Бибкод : 2000Natur.408..361W . дои : 10.1038/35042582 . ПМИД 11099043 . S2CID 795720 .
- ^ Перейти обратно: а б Кармена Дж.М., Лебедев М.А., Крист Р.Э., О'Доэрти Дж.Э., Сантуччи Д.М., Димитров Д.Ф. и др. (ноябрь 2003 г.). «Научимся управлять мозго-машинным интерфейсом, позволяющим приматам дотягиваться и хватать» . ПЛОС Биология . 1 (2): Е42. doi : 10.1371/journal.pbio.0000042 . ПМК 261882 . ПМИД 14624244 .
- ^ Перейти обратно: а б Лебедев М.А., Кармена Дж.М., О'Догерти Дж.Э., Заксенхаус М., Энрикес К.С., Принсипи Дж.К., Николелис М.А. (май 2005 г.). «Адаптация коркового ансамбля для представления скорости искусственного привода, управляемого интерфейсом мозг-машина» . Журнал неврологии . 25 (19): 4681–4693. doi : 10.1523/JNEUROSCI.4088-04.2005 . ПМЦ 6724781 . ПМИД 15888644 .
- ^ О'Догерти Дж.Э., Лебедев М.А., Иффт П.Дж., Чжуан К.З., Шокур С., Блейлер Х., Николелис М.А. (октябрь 2011 г.). «Активное тактильное исследование с использованием интерфейса мозг-машина-мозг» . Природа . 479 (7372): 228–231. Бибкод : 2011Natur.479..228O . дои : 10.1038/nature10489 . ПМК 3236080 . ПМИД 21976021 .
- ^ Серруя, М.Д., Хацопулос Н.Г., Панински Л., Феллоуз М.Р., Донохью Дж.П. (март 2002 г.). «Мгновенный нейронный контроль сигнала движения». Природа . 416 (6877): 141–142. Бибкод : 2002Natur.416..141S . дои : 10.1038/416141a . ПМИД 11894084 . S2CID 4383116 .
- ^ Тейлор Д.М., Тиллери С.И., Шварц А.Б. (июнь 2002 г.). «Прямое корковое управление трехмерными нейропротезами». Наука . 296 (5574): 1829–1832. Бибкод : 2002Sci...296.1829T . CiteSeerX 10.1.1.1027.4335 . дои : 10.1126/science.1070291 . ПМИД 12052948 . S2CID 9402759 .
- ^ Команда Питта создаст руку, управляемую мозгом. Архивировано 4 июля 2007 года в Wayback Machine , Pittsburgh Tribune Review , 5 сентября 2006 года.
- ^ Видео на YouTube
- ^ Веллист М., Перел С., Сполдинг М.К., Уитфорд А.С., Шварц А.Б. (июнь 2008 г.). «Кортикальный контроль протеза руки для самостоятельного питания» . Природа . 453 (7198): 1098–1101. Бибкод : 2008Natur.453.1098V . дои : 10.1038/nature06996 . ПМИД 18509337 . S2CID 4404323 .
- ^ Мусаллам С., Корнейл Б.Д., Грегер Б., Шербергер Х., Андерсен Р.А. (июль 2004 г.). «Сигналы когнитивного контроля для нейронного протезирования» . Наука . 305 (5681): 258–262. Бибкод : 2004Sci...305..258M . дои : 10.1126/science.1097938 . ПМИД 15247483 . S2CID 3112034 .
- ^ Сантуччи Д.М., Кралик Дж.Д., Лебедев М.А., Николелис М.А. (сентябрь 2005 г.). «Лобные и теменные кортикальные ансамбли предсказывают однократную мышечную активность во время движений у приматов». Европейский журнал неврологии . 22 (6): 1529–1540. дои : 10.1111/j.1460-9568.2005.04320.x . ПМИД 16190906 . S2CID 31277881 .
- ^ Ануманчипалли Г.К., Шартье Дж., Чанг Э.Ф. (апрель 2019 г.). «Синтез речи на основе нейронного декодирования произнесенных предложений» . Природа . 568 (7753): 493–498. Бибкод : 2019Natur.568..493A . дои : 10.1038/s41586-019-1119-1 . ПМЦ 9714519 . ПМИД 31019317 . S2CID 129946122 .
- ^ Пандаринатх С., Али Ю.Х. (апрель 2019 г.). «Мозговые имплантаты, которые позволяют вам высказывать свое мнение» . Природа . 568 (7753): 466–467. Бибкод : 2019Natur.568..466P . дои : 10.1038/d41586-019-01181-y . ПМИД 31019323 .
- ^ Перейти обратно: а б Мозес Д.А., Мецгер С.Л., Лю Дж.Р., Ануманчипалли Г.К., Макин Дж.Г., Сан П.Ф. и др. (июль 2021 г.). «Нейропротез для декодирования речи у парализованного человека с анартрией» . Медицинский журнал Новой Англии . 385 (3): 217–227. дои : 10.1056/NEJMoa2027540 . ПМЦ 8972947 . ПМИД 34260835 . S2CID 235907121 .
- ↑ Беллак, Пэм (14 июля 2021 г.). «Прослушивание мозга, чтобы помочь парализованному человеку заговорить» . Нью-Йорк Таймс .
- ^ «Использование BCI2000 в исследованиях BCI» . Национальный центр адаптивных нейротехнологий . Проверено 5 декабря 2023 г.
- ^ Хубер Д., Петряну Л., Гитани Н., Ранаде С., Громадка Т., Майнен З., Свобода К. (январь 2008 г.). «Редкая оптическая микростимуляция бочкообразной коры головного мозга стимулирует усвоенное поведение у свободно движущихся мышей» . Природа . 451 (7174): 61–64. Бибкод : 2008Natur.451...61H . дои : 10.1038/nature06445 . ПМЦ 3425380 . ПМИД 18094685 .
- ^ Николелис М.А., Лебедев М.А. (июль 2009 г.). «Принципы физиологии нейронных ансамблей, лежащие в основе работы интерфейсов мозг-машина». Обзоры природы. Нейронаука . 10 (7): 530–540. дои : 10.1038/nrn2653 . ПМИД 19543222 . S2CID 9290258 .
- ^ Перейти обратно: а б Зандер Т.О., Коте С. (апрель 2011 г.). «На пути к пассивным интерфейсам мозг-компьютер: применение технологии интерфейса мозг-компьютер к системам человек-машина в целом». Журнал нейронной инженерии . 8 (2): 025005. Бибкод : 2011JNEng...8b5005Z . дои : 10.1088/1741-2560/8/2/025005 . ПМИД 21436512 . S2CID 37168897 .
- ^ Ричардсон А.Г., Генбот Ю., Лю Х., Хао Х., Райнхарт С., ДеЛучча С. и др. (август 2019 г.). «Изучение стратегий активного восприятия с использованием сенсорного интерфейса мозг-машина» . Труды Национальной академии наук Соединенных Штатов Америки . 116 (35): 17509–17514. Бибкод : 2019PNAS..11617509R . дои : 10.1073/pnas.1909953116 . ПМК 6717311 . ПМИД 31409713 .
- ^ Абдулкадер С.Н., Атиа А., Мостафа М.С. (июль 2015 г.). «Взаимодействие мозга с компьютером: приложения и проблемы» . Египетский журнал информатики . 16 (2): 213–230. дои : 10.1016/j.eij.2015.06.002 . ISSN 1110-8665 .
- ^ Поликов В.С., Треско П.А., Райхерт В.М. (октябрь 2005 г.). «Реакция ткани головного мозга на хронически имплантированные нервные электроды». Журнал методов нейробиологии . 148 (1): 1–18. doi : 10.1016/j.jneumeth.2005.08.015 . ПМИД 16198003 . S2CID 11248506 .
- ^ "Видение-квест" . Проводной . (сентябрь 2002 г.).
- ^ Котлер С. «Видение-Квест» . Проводной . ISSN 1059-1028 . Проверено 10 ноября 2021 г.
- ^ Туллер Д. (1 ноября 2004 г.). «Доктор Уильям Добелл, пионер искусственного зрения, умер в возрасте 62 лет» . Нью-Йорк Таймс .
- ^ Науманн Дж (2012). В поисках рая: рассказ пациента об эксперименте с искусственным зрением . Кслибрис. ISBN 978-1-4797-0920-5 .
- ^ nurun.com (28 ноября 2012 г.). «Потерянный рай высоких технологий г-на Джен Наумана» . Thewig.com . Проверено 19 декабря 2016 г.
- ^ Кеннеди П.Р., Бакай Р.А. (июнь 1998 г.). «Восстановление нейронной активности парализованного пациента путем прямого подключения к мозгу». НейроОтчет . 9 (8): 1707–1711. дои : 10.1097/00001756-199806010-00007 . ПМИД 9665587 . S2CID 5681602 .
- ^ Хохберг Л.Р., Серруя М.Д., Фрихс Г.М., Муканд Дж.А., Салех М., Каплан А.Х. и др. (июль 2006 г.). «Нейрональный ансамбль управления протезами человека с тетраплегией». Природа . 442 (7099). Герхард М. Фрис, Джон А. Муканд, Марьям Салех, Авраам Х. Каплан, Альмут Браннер, Дэвид Чен, Ричард Д. Пенн и Джон П. Донохью: 164–171. Бибкод : 2006Natur.442..164H . дои : 10.1038/nature04970 . ПМИД 16838014 . S2CID 4347367 .
- ^ Мартинс Идуве. «Мозговой компьютерный интерфейс» . Академия.edu . Проверено 5 декабря 2023 г.
- ^ Хохберг Л.Р., Бахер Д., Яросевич Б., Масс Нью-Йорк, Симерал Дж.Д., Фогель Дж. и др. (май 2012 г.). «Люди с тетраплегией дотягиваются и хватают руками с помощью роботизированной руки, управляемой нейронами» . Природа . 485 (7398): 372–375. Бибкод : 2012Natur.485..372H . дои : 10.1038/nature11076 . ПМК 3640850 . ПМИД 22596161 .
- ^ Коллинджер Дж.Л., Водлингер Б., Дауни Дж.Э., Ван В., Тайлер-Кабара Э.К., Вебер Дж.Д. и др. (февраль 2013 г.). «Высокоэффективный нейропротезный контроль у человека с тетраплегией» . Ланцет . 381 (9866): 557–564. дои : 10.1016/S0140-6736(12)61816-9 . ПМЦ 3641862 . ПМИД 23253623 .
- ^ Уиллетт Ф.Р., Авансино Д.Т., Хохберг Л.Р., Хендерсон Дж.М., Шеной К.В. (май 2021 г.). «Высокоэффективная связь мозга с текстом посредством рукописного ввода» . Природа . 593 (7858): 249–254. Бибкод : 2021Natur.593..249W . дои : 10.1038/s41586-021-03506-2 . ПМЦ 8163299 . ПМИД 33981047 .
- ^ Уиллетт, Франция (2021). «Высокопроизводительный почерк BCI». Гугер С., Эллисон Б.З., Гундуз А. (ред.). Исследование интерфейса «мозг-компьютер»: современное резюме 10 . SpringerBriefs по электротехнике и вычислительной технике. Чам: Международное издательство Springer. стр. 105–109. дои : 10.1007/978-3-030-79287-9_11 . ISBN 978-3-030-79287-9 . S2CID 239736609 .
- ^ Хэмлитон Дж. (14 июля 2021 г.). «Экспериментальный мозговой имплантат позволяет парализованному человеку превращать свои мысли в слова» . Все учтено . ЭНЕРГЕТИЧЕСКИЙ ЯДЕРНЫЙ РЕАКТОР.
- ^ Пандаринатх С., Бенсмайя С.Дж. (сентябрь 2021 г.). «Наука и техника, лежащие в основе сенсибилизированных бионических рук, управляемых мозгом» . Физиологические обзоры . 102 (2): 551–604. doi : 10.1152/physrev.00034.2020 . ПМЦ 8742729 . ПМИД 34541898 . S2CID 237574228 .
- ^ Уиллетт, Фрэнсис Р.; Кунц, Эрин М.; Фан, Чаофэй; Авансино, Дональд Т.; Уилсон, Гай Х.; Чхве, Ын Ён; Камдар, Форам; Глассер, Мэтью Ф.; Хохберг, Ли Р.; Друкманн, Шауль; Шеной, Кришна В.; Хендерсон, Джейми М. (23 августа 2023 г.). «Высокопроизводительный речевой нейропротез» . Природа . 620 (7976): 1031–1036. Бибкод : 2023Natur.620.1031W . дои : 10.1038/s41586-023-06377-x . ISSN 1476-4687 . ПМЦ 10468393 . ПМИД 37612500 .
- ^ Мецгер, Шон Л.; Литтлджон, Кайло Т.; Сильва, Александр Б.; Моисей, Дэвид А.; Ситон, Маргарет П.; Ван, Ран; Догерти, Максимилиан Э.; Лю, Джесси Р.; Ву, Питер; Бергер, Майкл А.; Журавлёва Инга; Ту-Чан, Аделин; Гангулы, Карунеш; Ануманчипалли, Гопала К.; Чанг, Эдвард Ф. (23 августа 2023 г.). «Высокопроизводительный нейропротез для декодирования речи и управления аватарами» . Природа . 620 (7976): 1037–1046. Бибкод : 2023Natur.620.1037M . дои : 10.1038/s41586-023-06443-4 . ISSN 1476-4687 . ПМЦ 10826467 . ПМИД 37612505 . S2CID 261098775 .
- ^ Наддаф, Мирьям (23 августа 2023 г.). «Устройства чтения мыслей позволяют парализованным людям говорить, используя свои мысли» . Природа . 620 (7976): 930–931. Бибкод : 2023Natur.620..930N . дои : 10.1038/d41586-023-02682-7 . ПМИД 37612493 . S2CID 261099321 .
- ^ Чжан М., Тан З., Лю Х, Ван дер Шпигель Дж. (апрель 2020 г.). «Электронные нейронные интерфейсы». Природная электроника . 3 (4): 191–200. дои : 10.1038/s41928-020-0390-3 . ISSN 2520-1131 . S2CID 216508360 .
- ^ Ходжкин А.Л., Хаксли А.Ф. (август 1952 г.). «Количественное описание мембранного тока и его применение к проводимости и возбуждению нерва» . Журнал физиологии . 117 (4): 500–544. doi : 10.1113/jphysicalol.1952.sp004764 . ПМК 1392413 . ПМИД 12991237 .
- ^ Перейти обратно: а б Обьен М.Е., Делигкарис К., Буллманн Т., Баккум DJ, Фрей Ю (2015). «Выявление функции нейронов посредством записей микроэлектродной матрицы» . Границы в неврологии . 8 : 423. дои : 10.3389/fnins.2014.00423 . ПМК 4285113 . ПМИД 25610364 .
- ^ Перейти обратно: а б Харрисон Р.Р. (июль 2008 г.). «Разработка интегральных схем для наблюдения за мозговой деятельностью». Труды IEEE . 96 (7): 1203–1216. дои : 10.1109/JPROC.2008.922581 . ISSN 1558-2256 . S2CID 7020369 .
- ^ Хаджи Д., Лю Й., Горейшизаде С.С., Константину Т.Г. (февраль 2020 г.). «Ключевые аспекты управления питанием в активных имплантируемых медицинских устройствах» . 11-й Латиноамериканский симпозиум по схемам и системам IEEE (LASCAS) , 2020 г. стр. 1–4. дои : 10.1109/LASCAS45839.2020.9069004 . ISBN 978-1-7281-3427-7 . S2CID 215817530 .
- ^ Дауни Дж. Э., Швед Н., Чейз С. М., Шварц А. Б., Коллинджер Дж. Л. (август 2018 г.). «Стабильность внутрикорковой записи у пользователей интерфейса мозг-компьютер». Журнал нейронной инженерии . 15 (4): 046016. Бибкод : 2018JNEng..15d6016D . дои : 10.1088/1741-2552/aab7a0 . ПМИД 29553484 . S2CID 3961913 .
- ^ Фрейре М.А., Мория Э., Фабер Дж., Сантос Дж.Р., Гимарайнш Х.С., Лемос Н.А., Самешима К., Перейра А., Рибейро С., Николелис М. (ноябрь 2011 г.). «Комплексный анализ сохранности тканей и качества записи от хронических многоэлектродных имплантатов» . ПЛОС ОДИН . 6 (11): e27554. Бибкод : 2011PLoSO...627554F . дои : 10.1371/journal.pone.0027554 . ПМЦ 4476592 . ПМИД 26098896 .
- ^ Шостак К.М., Гранд Л., Констандину Т.Г. (2017). «Нейронные интерфейсы для внутрикорковой записи: требования, методы изготовления и характеристики» . Границы в неврологии . 11 : 665. дои : 10.3389/fnins.2017.00665 . ПМЦ 5725438 . ПМИД 29270103 .
- ^ Перейти обратно: а б Саксена Т., Карумбайя Л., Гаупп Э.А., Паткар Р., Патил К., Бетанкур М. и др. (июль 2013 г.). «Влияние хронического нарушения гематоэнцефалического барьера на функцию внутрикорковых электродов». Биоматериалы . 34 (20): 4703–4713. doi : 10.1016/j.bimaterials.2013.03.007 . ПМИД 23562053 .
- ^ Нолта Н.Ф., Кристенсен М.Б., Крейн П.Д., Скоусен Дж.Л., Треско П.А. (1 июня 2015 г.). «Утечка ГЭБ, астроглиоз и потеря тканей коррелируют с производительностью записи матрицы кремниевых микроэлектродов». Биоматериалы . 53 : 753–762. doi : 10.1016/j.bimaterials.2015.02.081 . ПМИД 25890770 .
- ^ Робинсон Дж.Т., Полмейер Э., Гатер М.К., Кемер С., Китчинг Дж.Э., Маллиарас Г.Г. и др. (ноябрь 2019 г.). «Разработка технологий распознавания мозга нового поколения – обзор» . Журнал датчиков IEEE . 19 (22): 10163–10175. дои : 10.1109/JSEN.2019.2931159 . ПМК 7047830 . ПМИД 32116472 .
- ^ Луан Л., Вэй Икс, Чжао З., Сигел Дж.Дж., Потнис О., Таппен К.А. и др. (февраль 2017 г.). «Сверхгибкие наноэлектронные зонды формируют надежную нейронную интеграцию без глиальных рубцов» . Достижения науки . 3 (2): e1601966. Бибкод : 2017SciA....3E1966L . дои : 10.1126/sciadv.1601966 . ПМК 5310823 . ПМИД 28246640 .
- ^ Франк Дж.А., Антонини М.Ю., Аникеева П. (сентябрь 2019 г.). «Интерфейсы нового поколения для изучения нейронных функций» . Природная биотехнология . 37 (9): 1013–1023. дои : 10.1038/s41587-019-0198-8 . ПМЦ 7243676 . ПМИД 31406326 .
- ^ Перейти обратно: а б Хонг Дж., Виверос Р.Д., Цван Т.Дж., Ян Х., Либер К.М. (июль 2018 г.). «Тканеподобные нейронные зонды для понимания и модуляции мозга» . Биохимия . 57 (27): 3995–4004. doi : 10.1021/acs.biochem.8b00122 . ПМК 6039269 . ПМИД 29529359 .
- ^ Виверос Р.Д., Чжоу Т., Хонг Дж., Фу ТМ, Лин Х.Г., Либер К.М. (июнь 2019 г.). «Усовершенствованные одно- и двумерные конструкции сеток для инъекционной электроники» . Нано-буквы . 19 (6): 4180–4187. Бибкод : 2019NanoL..19.4180V . дои : 10.1021/acs.nanolett.9b01727 . ПМК 6565464 . ПМИД 31075202 .
- ^ Гулати Т., Вон С.Дж., Раманатан Д.С., Вонг CC, Бодепуди А., Суонсон Р.А., Гангули К. (июнь 2015 г.). «Надежный нейропротезный контроль из коры головного мозга, пораженной инсультом» . Журнал неврологии . 35 (22): 8653–8661. doi : 10.1523/JNEUROSCI.5007-14.2015 . ПМК 6605327 . ПМИД 26041930 .
- ^ Солдози С., Янг С., Кумар Дж.С., Чапек С., Фелбаум Д.Р., Джин В.К. и др. (июль 2020 г.). «Систематический обзор эндоваскулярных стент-электродных решеток, минимально инвазивного подхода к интерфейсам мозг-машина» . Нейрохирургический фокус . 49 (1): Е3. дои : 10.3171/2020.4.FOCUS20186 . ПМИД 32610291 . S2CID 220308983 .
- ^ Перейти обратно: а б Опи Н (2021). «Система нейронного интерфейса StentrodeTM». В Гугере С., Эллисон Б.З., Тангерманне М. (ред.). Исследование интерфейса «мозг-компьютер» . SpringerBriefs по электротехнике и вычислительной технике. Чам: Международное издательство Springer. стр. 127–132. дои : 10.1007/978-3-030-60460-8_13 . ISBN 978-3-030-60460-8 . S2CID 234102889 .
- ^ Телеб М.С., Чип М.Е., Лаззаро М.А., Гейт А., Асиф К., Ремлер Б., Зайдат О.О. (май 2014 г.). «Идиопатическая внутричерепная гипертензия. Систематический анализ стентирования поперечного синуса» . Интервенционная неврология . 2 (3): 132–143. дои : 10.1159/000357503 . ПМК 4080637 . ПМИД 24999351 .
- ^ Брайсон С. (5 ноября 2020 г.). «Устройство Стентрод позволяет управлять компьютером пациентами с БАС с частичным параличом верхних конечностей» . Новости БАС сегодня .
- ^ Ланезе, Николетта (12 января 2023 г.). «Новое устройство, «управляемое мыслью», считывает активность мозга через яремную вену» . www.livscience.com . Архивировано из оригинала 16 февраля 2023 года . Проверено 16 февраля 2023 г.
- ^ Митчелл, Питер; Ли, Сара СМ; Йоу, Питер Э.; Мороков, Андрей; Шарма, Рахул П.; Уильямс, Дэрил Л.; МакИсаак, Кристофер; Ховард, Марк Э.; Ирвинг, Лу; Врлич, Иван; Уильямс, Кэмерон; Буш, Стивен; Балабански, Анна Х.; Драммонд, Кэтрин Дж.; Десмонд, Патрисия; Вебер, Дуглас; Денисон, Тимоти; Мазерс, Сьюзен; О'Брайен, Теренс Дж.; Мокко, Дж.; Грейден, Дэвид Б.; Либескинд, Дэвид С.; Опи, Николас Л.; Оксли, Томас Дж.; Кэмпбелл, Брюс CV (9 января 2023 г.). «Оценка безопасности полностью имплантированного эндоваскулярного интерфейса мозг-компьютер при тяжелом параличе у 4 пациентов: исследование стентрода с цифровым переключателем, управляемым мыслью (SWITCH)» . JAMA Неврология . 80 (3): 270–278. дои : 10.1001/jamaneurol.2022.4847 . ISSN 2168-6149 . ПМЦ 9857731 . ПМИД 36622685 . S2CID 255545643 .
- ^ Серруя М., Донохью Дж. (2004). «Глава III: Принципы проектирования нейромоторного протеза» (PDF) . В Хорьхе К.В., Диллон Г.С. (ред.). Нейропротезирование: теория и практика . Издательство Имперского колледжа. стр. 1158–1196. дои : 10.1142/9789812561763_0040 . Архивировано из оригинала (PDF) 4 апреля 2005 г.
- ^ «Подросток перемещает иконки видео только благодаря воображению» . Пресс-релиз . Вашингтонский университет в Сент-Луисе. 9 октября 2006 г.
- ^ Шалк Г., Миллер К.Дж., Андерсон Н.Р., Уилсон Дж.А., Смит М.Д., Оджеманн Дж.Г. и др. (март 2008 г.). «Двумерное управление движением человека с помощью электрокортикографических сигналов» . Журнал нейронной инженерии . 5 (1): 75–84. Бибкод : 2008JNEng...5...75S . дои : 10.1088/1741-2560/5/1/008 . ПМК 2744037 . ПМИД 18310813 .
- ^ Николас-Алонсо Л.Ф., Гомес-Хиль Х (31 января 2012 г.). «Мозговые компьютерные интерфейсы, обзор» . Датчики . 12 (2): 1211–1279. Бибкод : 2012Senso..12.1211N . дои : 10.3390/s120201211 . ПМК 3304110 . ПМИД 22438708 .
- ^ Янагисава Т. (2011). «Электрокортикографический контроль протеза руки у парализованных пациентов». Американская неврологическая ассоциация . Том. 71, нет. 3. С. 353–361. дои : 10.1002/ana.22613 .
BCI на основе ECoG имеет преимущество в сигнале и долговечности, которые абсолютно необходимы для клинического применения.
- ^ Перейти обратно: а б Пей Икс (2011). «Декодирование гласных и согласных в произнесенных и воображаемых словах с использованием электрокортикографических сигналов у людей». J Neural Eng 046028-я сер. 8.4 . ПМИД 21750369 .
Джастин Уильямс, биомедицинский инженер из университета, уже превратил имплантат ECoG в микроустройство, которое можно установить с минимумом хлопот. Его тестировали на животных в течение длительного периода времени: микро-ЭКоГ остается на месте и не оказывает негативного влияния на иммунную систему.
- ^ Макин Дж.Г., Мозес Д.А., Чанг Э.Ф. (2021). «Декодирование речи как машинный перевод». Гугер С., Эллисон Б.З., Гундуз А. (ред.). Исследование интерфейса «мозг-компьютер» . SpringerBriefs по электротехнике и вычислительной технике. Чам: Международное издательство Springer. стр. 23–33. дои : 10.1007/978-3-030-79287-9_3 . ISBN 978-3-030-79287-9 . S2CID 239756345 .
- ^ Макин Дж.Г., Мозес Д.А., Чанг Э.Ф. (апрель 2020 г.). «Машинный перевод корковой активности в текст с помощью системы кодирования-декодера» . Природная неврология . 23 (4): 575–582. дои : 10.1038/s41593-020-0608-8 . ПМЦ 10560395 . ПМИД 32231340 . S2CID 214704481 .
- ^ Гальегос-Аяла Г., Фурдеа А., Такано К., Руф К.А., Флор Х., Бирбаумер Н. (май 2014 г.). «Мозговая коммуникация у полностью изолированного пациента с использованием прикроватной инфракрасной спектроскопии» . Неврология . 82 (21): 1930–1932. дои : 10.1212/WNL.0000000000000449 . ПМК 4049706 . ПМИД 24789862 .
- ^ Видаль 1977
- ^ Bozinovska et al. 1988, 1990
- ^ Божиновский и др. 1988 год
- ^ Фарвелл и Дончин, 1988 г.
- ^ Божиновский С, Божиновская Л (2019). «Интерфейс мозг-компьютер в Европе: тридцатый юбилей» . Автоматика . 60 (1): 36–47. дои : 10.1080/00051144.2019.1570644 .
- ^ Уинтерс, Джеффри (май 2003 г.). «Общение с помощью мозговых волн» . Психология сегодня .
- ^ Адриан Божиновски «Триггер CNV как парадигма интерфейса мозг-компьютер» В Дж. Керне, С. Тонковиче и др. (Редакторы) Протоколы 7-й конференции Хорватской ассоциации медицинской информатики, стр. 149–154, Риека, 2005 г.
- ^ Божиновский, Адриан; Божиновска, Лиляна (2009). Упреждающие потенциалы мозга в парадигме интерфейса «мозг-робот» . 2009 г. 4-я Международная конференция IEEE/EMBS по нейронной инженерии. IEEE. стр. 451–454. дои : 10.1109/ner.2009.5109330 .
- ^ Божиновский, Адриан; Тонкович, Станко; Ишгум, Велимир; Божиновская, Лиляна (2011). «Управление роботом с использованием упреждающих возможностей мозга» . Автоматизация . 52 (1): 20–30. дои : 10.1080/00051144.2011.11828400 . S2CID 33223634 .
- ^ Божиновский, Стево; Божиновский, Адриан (2015). «Психические состояния, проявления ЭЭГ и мысленно эмулируемые цифровые схемы для взаимодействия мозга и робота» . Транзакции IEEE по автономному умственному развитию . 7 (1). Институт инженеров по электротехнике и электронике (IEEE): 39–51. дои : 10.1109/tamd.2014.2387271 . ISSN 1943-0604 . S2CID 21464338 .
- ^ Юань Х., Лю Т., Шарковски Р., Риос К., Эш Дж., Хе Б. (февраль 2010 г.). «Отрицательная ковариация между ответами на задачу в активности альфа / бета-диапазона и BOLD в сенсомоторной коре человека: исследование ЭЭГ и фМРТ воображения движений и движений» . НейроИмидж . 49 (3): 2596–2606. doi : 10.1016/j.neuroimage.2009.10.028 . ПМК 2818527 . ПМИД 19850134 .
- ^ Дуд А.Дж., Лукас Дж.П., Пизанский М.Т., Хе Б. (2011). Гриббл П.Л. (ред.). «Непрерывное трехмерное управление виртуальным вертолетом с использованием интерфейса мозг-компьютер на основе изображений движений» . ПЛОС ОДИН . 6 (10): e26322. Бибкод : 2011PLoSO...626322D . дои : 10.1371/journal.pone.0026322 . ПМК 3202533 . ПМИД 22046274 .
- ^ «Вертолет, управляемый мыслью, взлетает» . Новости Би-би-си . 5 июня 2013 года . Проверено 5 июня 2013 г.
- ^ Цинь Л., Дин Л., Хэ Б. (сентябрь 2004 г.). «Классификация двигательных образов посредством анализа источников для приложений интерфейса мозг-компьютер» . Журнал нейронной инженерии . 1 (3): 135–141. Бибкод : 2004JNEng...1..135Q . дои : 10.1088/1741-2560/1/3/002 . ЧВК 1945182 . ПМИД 15876632 .
- ^ Хёне Дж., Хольц Э., Штайгер-Зельцер П., Мюллер К.Р. , Кюблер А., Тангерманн М. (2014). «Воображение движений у пациентов с тяжелыми двигательными нарушениями: доказательства использования интерфейса мозг-компьютер как превосходного решения для контроля» . ПЛОС ОДИН . 9 (8): e104854. Бибкод : 2014PLoSO...9j4854H . дои : 10.1371/journal.pone.0104854 . ПМК 4146550 . ПМИД 25162231 .
- ^ Берд Джей-Джей, Фариа Д.Р., Мансо Л.Дж., Экарт А., Букингемский компакт-диск (13 марта 2019 г.). «Глубокий эволюционный подход к биоинспирированной оптимизации классификаторов для взаимодействия мозга и машины» . Сложность . 2019 . Хиндави Лимитед: 1–14. arXiv : 1908.04784 . дои : 10.1155/2019/4316548 . ISSN 1076-2787 .
- ^ Мансур С., Анг К.К., Наир К.П., Фуа К.С., Арване М. (январь 2022 г.). «Эффективность интерфейса мозг-компьютер и влияние его конструктивных характеристик на постинсультную реабилитацию верхних конечностей: систематический обзор и метаанализ рандомизированных контролируемых исследований» . Клиническая ЭЭГ и нейронауки . 53 (1): 79–90. дои : 10.1177/15500594211009065 . ПМЦ 8619716 . ПМИД 33913351 . S2CID 233446181 .
- ^ Baniqued PD, Stanyer EC, Awais M, Alasmani A, Jackson AE, Mon-Williams MA и др. (январь 2021 г.). «Робототехника с интерфейсом мозг-компьютер для реабилитации рук после инсульта: систематический обзор» . Журнал нейроинженерии и реабилитации . 18 (1): 15. дои : 10.1186/s12984-021-00820-8 . ПМЦ 7825186 . PMID 33485365 .
- ^ Тахери Б.А., Найт Р.Т., Смит Р.Л. (май 1994 г.). «Сухой электрод для регистрации ЭЭГ» . Электроэнцефалография и клиническая нейрофизиология . 90 (5): 376–383. дои : 10.1016/0013-4694(94)90053-1 . ПМИД 7514984 .
- ^ Ализаде-Тахери Б (1994). Активная микромашинная электродная матрица для регистрации сигналов ЭЭГ (докторская диссертация). п. 82. Бибкод : 1994PhDT........82A .
- ^ Хокенберри, Джон (август 2001 г.). «Следующие умники» . Проводной . Том. 9, нет. 8.
- ^ Лин КТ, Ко Л.В., Чанг С.Дж., Ван Ю.Т., Чунг Ч., Ян Ф.С. и др. (2009), «Носимый и беспроводной интерфейс мозг-компьютер и его приложения», Основы расширенного познания. Нейроэргономика и оперативная нейронаука , Конспект лекций по информатике, том. 5638, Springer Berlin Heidelberg, стр. 741–748, doi : 10.1007/978-3-642-02812-0_84 , ISBN 978-3-642-02811-3 , S2CID 14515754
- ^ Перейти обратно: а б с д Ван Ю.Т., Ван Ю., Юнг Т.П. (апрель 2011 г.). «Интерфейс мозг-компьютер на базе сотового телефона для общения в повседневной жизни». Журнал нейронной инженерии . 8 (2): 025018. Бибкод : 2011JNEng...8b5018W . дои : 10.1088/1741-2560/8/2/025018 . ПМИД 21436517 . S2CID 10943518 .
- ^ Гугер С., Эллисон Б.З., Гросвиндхагер Б., Прюкл Р., Хинтермюллер С., Капеллер С. и др. (2012). «Сколько людей могут использовать SSVEP BCI?» . Границы в неврологии . 6 : 169. дои : 10.3389/fnins.2012.00169 . ПМЦ 3500831 . ПМИД 23181009 .
- ^ Перейти обратно: а б Линь Ю.П., Ван Ю., Юнг Т.П. (2013). «Мобильный интерфейс мозг-компьютер на базе SSVEP для свободно перемещающихся людей: надежность канонического корреляционного анализа к артефактам движения». 2013 35-я ежегодная международная конференция Общества инженерии в медицине и биологии IEEE (EMBC) . Том. 2013. С. 1350–1353. дои : 10.1109/EMBC.2013.6609759 . ISBN 978-1-4577-0216-7 . ПМИД 24109946 . S2CID 23136360 .
- ^ Рашид М., Сулейман Н., Абдул Маджид А.П., Муса Р.М., Аб Насир А.Ф., Бари Б.С., Хатун С. (2020). «Текущее состояние, проблемы и возможные решения интерфейса мозг-компьютер на основе ЭЭГ: всесторонний обзор» . Границы нейроробототехники . 14:25 . дои : 10.3389/fnbot.2020.00025 . ПМЦ 7283463 . ПМИД 32581758 .
- ^ США 20130127708 , выдан 23 мая 2013 г.
- ^ Перейти обратно: а б с Ван Ю.Т., Ван Ю., Ченг К.К., Юнг Т.П. (2013). «Разработка презентации стимулов на мобильных устройствах для действительно портативного BCI на основе SSVEP». 2013 35-я ежегодная международная конференция Общества инженерии в медицине и биологии IEEE (EMBC) . Том. 2013. С. 5271–5274. дои : 10.1109/EMBC.2013.6610738 . ISBN 978-1-4577-0216-7 . ПМИД 24110925 . S2CID 14324159 .
- ^ Бинь Г, Гао Х, Ян З, Хун Б, Гао С (август 2009 г.). «Многоканальный онлайн-интерфейс мозг-компьютер на базе ССВЭП с использованием метода канонического корреляционного анализа». Журнал нейронной инженерии . 6 (4): 046002. Бибкод : 2009JNEng...6d6002B . дои : 10.1088/1741-2560/6/4/046002 . ПМИД 19494422 . S2CID 32640699 .
- ^ Симеониду Э.Р., Нордин А.Д., Хейрстон В.Д., Феррис Д.П. (апрель 2018 г.). «Влияние раскачивания кабеля, площади поверхности электрода и массы электрода на качество сигнала электроэнцефалографии во время движения» . Датчики . 18 (4): 1073. Бибкод : 2018Senso..18.1073S . дои : 10.3390/s18041073 . ПМЦ 5948545 . ПМИД 29614020 .
- ^ Ван Ю, Ван Р, Гао X, Хун Б, Гао С (июнь 2006 г.). «Практический интерфейс мозг-компьютер на основе VEP». Транзакции IEEE по нейронным системам и реабилитационной технике . 14 (2): 234–239. дои : 10.1109/TNSRE.2006.875576 . ПМИД 16792302 .
- ^ Пфурчеллер Г., Мюллер Г.Р., Пфурчеллер Дж., Гернер Х.Дж., Рупп Р. (ноябрь 2003 г.). « Мысль — контроль функциональной электростимуляции для восстановления захвата рук у пациента с тетраплегией». Письма по неврологии . 351 (1): 33–36. дои : 10.1016/S0304-3940(03)00947-9 . ПМИД 14550907 . S2CID 38568963 .
- ^ До АХ, Ван П.Т., Кинг CE, Чун С.Н., Ненадич З. (декабрь 2013 г.). «Роботизированный ортез походки с управлением по интерфейсу мозг-компьютер» . Журнал нейроинженерии и реабилитации . 10 (1): 111. дои : 10.1186/1743-0003-10-111 . ПМК 3907014 . ПМИД 24321081 .
- ^ Субъект с параплегией управляет RoGO (4x) под управлением BCI на YouTube.com
- ^ Алекс Блейни управляет дешевым потребительским роботом-манипулятором с помощью гарнитуры EPOC через последовательный ретрансляционный порт на YouTube.com.
- ^ Ранганата Ситарам, Андреа Кариа, Ральф Вейт, Тилман Габер, Джузеппина Рота, Андреа Кюблер и Нильс Бирбаумер (2007) « Интерфейс мозга и компьютера FMRI: инструмент для нейробиологических исследований и лечения »
- ^ Пеплоу, Марк (27 августа 2004 г.). «Ментальный пинг-понг может помочь людям, страдающим параличом нижних конечностей». Новости@природа . дои : 10.1038/news040823-18 .
- ^ «Чтобы управлять роботом только с помощью мозга, ATR и Honda разрабатывают базовую технологию BMI» . Технология включена . 26 мая 2006 г. Архивировано из оригинала 23 июня 2017 г. . Проверено 22 сентября 2006 г.
- ^ Мияваки Ю., Учида Х., Ямасита О., Сато М.А., Морито Ю., Танабэ Х.К. и др. (декабрь 2008 г.). «Визуальная реконструкция изображений по активности человеческого мозга с использованием комбинации многомасштабных локальных декодеров изображений» . Нейрон . 60 (5): 915–929. дои : 10.1016/j.neuron.2008.11.004 . ПМИД 19081384 . S2CID 17327816 .
- ^ Нисимото С., Ву А.Т., Населарис Т., Бенджамини Ю., Ю.Б., Галлант Дж.Л. (октябрь 2011 г.). «Реконструкция визуальных впечатлений на основе активности мозга, вызванной естественными фильмами» . Современная биология . 21 (19): 1641–1646. дои : 10.1016/j.cub.2011.08.031 . ПМЦ 3326357 . ПМИД 21945275 .
- ^ Ям, Филип (22 сентября 2011 г.). «Прорыв может позволить другим увидеть ваши сны и воспоминания» . Научный американец . Проверено 25 сентября 2011 г.
- ^ «Реконструкция визуальных впечатлений на основе активности мозга, вызванной естественными фильмами (страница проекта)» . Галантная лаборатория Калифорнийского университета в Беркли . Архивировано из оригинала 25 сентября 2011 года . Проверено 25 сентября 2011 г.
- ^ Анвар, Ясмин (22 сентября 2011 г.). «Ученые используют визуализацию мозга, чтобы выявить фильмы в нашем сознании» . Калифорнийского университета в Беркли Информационный центр . Проверено 25 сентября 2011 г.
- ^ Перейти обратно: а б с Маршалл Д., Койл Д., Уилсон С., Каллаган М. (2013). «Игры, игровой процесс и BCI: современное состояние». Транзакции IEEE по вычислительному интеллекту и искусственному интеллекту в играх . 5 (2): 83. doi : 10.1109/TCIAIG.2013.2263555 . S2CID 206636315 .
- ^ «Цели организаторов» . Би-би-си . Проверено 19 декабря 2022 г.
- ^ Анг К.К., Чин З.Ю., Ван С., Гуань С., Чжан Х. (1 января 2012 г.). «Алгоритм общего пространственного шаблона банка фильтров в наборах данных 2a и 2b BCI Competition IV» . Границы в неврологии . 6:39 . дои : 10.3389/fnins.2012.00039 . ПМЦ 3314883 . ПМИД 22479236 .
- ^ Фэрклаф, Стивен Х. (январь 2009 г.). «Основы физиологических вычислений» . Взаимодействие с компьютерами . 21 (1–2): 133–145. дои : 10.1016/j.intcom.2008.10.011 . S2CID 16314534 .
- ^ Божиновский С (2017). «Робототехника обработки сигналов с использованием сигналов, генерируемых головой человека: от новаторских работ до эмуляции цифровых схем на основе ЭЭГ». Достижения в области проектирования роботов и интеллектуального управления . Достижения в области интеллектуальных систем и вычислений. Том. 540. стр. 449–462. дои : 10.1007/978-3-319-49058-8_49 . ISBN 978-3-319-49057-1 .
- ^ Матот С., Мелми Ж.Б., ван дер Линден Л., Ван дер Стигчел С. (2016). «Ученик, пишущий мысли: интерфейс человека и компьютера, основанный на декодировании скрытого внимания посредством пупиллометрии» . ПЛОС ОДИН . 11 (2): e0148805. Бибкод : 2016PLoSO..1148805M . дои : 10.1371/journal.pone.0148805 . ПМЦ 4743834 . ПМИД 26848745 .
- ^ Блэнд, Эрик (13 октября 2008 г.). «Армия развивает «синтетическую телепатию» » . Новости Дискавери . Проверено 13 октября 2008 г.
- ^ Паис-Виейра М., Лебедев М., Куницки С., Ван Дж., Николелис М.А. (28 февраля 2013 г.). «Интерфейс «мозг-мозг» для обмена сенсомоторной информацией в реальном времени» . Научные отчеты . 3 : 1319. Бибкод : 2013NatSR...3E1319P . дои : 10.1038/srep01319 . ПМЦ 3584574 . ПМИД 23448946 .
- ^ Горман, Джеймс (28 февраля 2013 г.). «Одна крыса думает, а другая реагирует» . Нью-Йорк Таймс . Проверено 28 февраля 2013 г.
- ^ Образец, Ян (1 марта 2013 г.). «Интерфейс «мозг-мозг» позволяет крысам обмениваться информацией через Интернет» . Хранитель . Проверено 2 марта 2013 г.
- ^ Кеннеди, Пэган (18 сентября 2011 г.). «Киборг в каждом из нас» . Нью-Йорк Таймс . Проверено 28 января 2012 г.
- ^ Селим, Джоселин; Дринкелл, Пит (1 ноября 2002 г.). «Бионическая связь» . Обнаружить . Архивировано из оригинала 6 января 2008 года.
- ^ Джаймо, Кара (10 июня 2015 г.). «Связь нервной системы приводит к телепатическому хватанию за руки» . Атлас Обскура .
- ^ Уорвик, К., Гассон, М., Хатт, Б., Гудхью, И., Киберд, П., Шульцринн, Х. и Ву, X: «Мысленная коммуникация и контроль: первый шаг с использованием радиотелеграфии», IEE Proceedings on Communications, 151 (3) ), стр. 185–189, 2004 г.
- ^ Уорвик К., Гассон М., Хатт Б., Гудхью И., Киберд П., Эндрюс Б. и др. (октябрь 2003 г.). «Применение технологии имплантации для кибернетических систем» . Архив неврологии . 60 (10): 1369–1373. дои : 10.1001/archneur.60.10.1369 . ПМИД 14568806 .
- ^ Грау С., Жинхо Р., Риера А., Нгуен Т.Л., Чауват Х., Берг М. и др. (2014). «Сознательное межмозговое общение у людей с использованием неинвазивных технологий» . ПЛОС ОДИН . 9 (8): е105225. Бибкод : 2014PLoSO...9j5225G . дои : 10.1371/journal.pone.0105225 . ПМК 4138179 . ПМИД 25137064 .
- ^ Маццатента А., Джулиано М., Кампиделли С., Гамбацци Л., Бузинаро Л., Маркрам Х. и др. (июнь 2007 г.). «Взаимодействие нейронов с углеродными нанотрубками: передача электрических сигналов и синаптическая стимуляция в культивируемых цепях мозга» . Журнал неврологии . 27 (26): 6931–6936. doi : 10.1523/JNEUROSCI.1051-07.2007 . ПМК 6672220 . ПМИД 17596441 .
- ↑ Ученые Калифорнийского технологического института разработали первый нейрочип , Калифорнийский технологический институт, 26 октября 1997 г.
- ^ Сандхана, Лакшми (22 октября 2004 г.). «Приходя в мозг рядом с тобой» . Проводные новости . Архивировано из оригинала 10 сентября 2006 года.
- ^ « Мозг в тарелке летает на авиасимуляторе» . CNN . 4 ноября 2004 г.
- ^ «Дэвид Пирс – Человечество плюс» . 5 октября 2017 года . Проверено 30 декабря 2021 г.
- ^ Стойка А (2010). «Спекуляции на тему роботов, киборгов и телеприсутствия» . Ютуб . Архивировано из оригинала 28 декабря 2021 года . Проверено 28 декабря 2021 г.
- ^ «Эксперты «переопределят будущее» в Humanity+ @ CalTech» . Курцвейл . Проверено 30 декабря 2021 г.
- ^ WO2012100081A2 , Стойка, Адриан, «Агрегация биосигналов от нескольких людей для достижения коллективного результата», выпущено 26 июля 2012 г.
- ^ Ван Ю, Юнг Т.П. (31 мая 2011 г.). «Совместный интерфейс мозг-компьютер для улучшения производительности человека» . ПЛОС ОДИН . 6 (5): e20422. Бибкод : 2011PLoSO...620422W . дои : 10.1371/journal.pone.0020422 . ПМК 3105048 . ПМИД 21655253 .
- ^ Экстайн М.П., Дас К., Фам Б.Т., Петерсон М.Ф., Эбби С.К., Си Дж.Л., Гисбрехт Б. (январь 2012 г.). «Нейронное декодирование коллективной мудрости с помощью мультимозговых вычислений». НейроИмидж . 59 (1): 94–108. doi : 10.1016/j.neuroimage.2011.07.009 . ПМИД 21782959 . S2CID 14930969 .
- ^ Стойка А (сентябрь 2012 г.). «MultiMind: объединение сигналов нескольких мозгов, позволяющее превзойти мощность одного мозга» . 2012 Третья Международная конференция по новым технологиям безопасности . стр. 94–98. дои : 10.1109/EST.2012.47 . ISBN 978-0-7695-4791-6 . S2CID 6783719 .
- ^ «Снова парализован» . Обзор технологий Массачусетского технологического института . Проверено 8 декабря 2023 г.
- ^ «Гейл — вход в продукт» . galeapps.gale.com . Проверено 8 декабря 2023 г.
- ^ Иенка, Марчелло; Хаселагер, Пим (июнь 2016 г.). «Взлом мозга: технология взаимодействия мозг-компьютер и этика нейробезопасности» . Этика и информационные технологии . 18 (2): 117–129. дои : 10.1007/s10676-016-9398-9 . S2CID 5132634 .
- ^ Штайнерт, Штеффен; Фридрих, Орсоля (1 февраля 2020 г.). «Проводные эмоции: этические проблемы аффективных интерфейсов мозг-компьютер» . Наука и инженерная этика . 26 (1): 351–367. дои : 10.1007/s11948-019-00087-2 . ISSN 1471-5546 . ПМК 6978299 . PMID 30868377 .
- ^ Клаузен, Йенс (1 февраля 2009 г.). «Человек, машина и нечто среднее» . Природа . 457 (7233): 1080–1081. Бибкод : 2009Natur.457.1080C . дои : 10.1038/4571080a . ISSN 0028-0836 . ПМИД 19242454 . S2CID 205043226 .
- ^ Хаселагер, Пим; Влек, Рутгер; Хилл, Джереми; Нижбоер, Фемке (1 ноября 2009 г.). «Заметка об этических аспектах BCI» . Нейронные сети . Мозг-машинный интерфейс. 22 (9): 1352–1357. дои : 10.1016/j.neunet.2009.06.046 . hdl : 2066/77533 . ISSN 0893-6080 . ПМИД 19616405 .
- ^ Аттия, Марк А.; Фара, Марта Дж. (15 мая 2014 г.). «Умы, материнские платы и деньги: футуризм и реализм в нейроэтике технологий BCI» . Границы системной нейронауки . 8 : 86. дои : 10.3389/fnsys.2014.00086 . ISSN 1662-5137 . ПМК 4030132 . ПМИД 24860445 .
- ^ Нижбоер, Фемке; Клаузен, Йенс; Эллисон, Брендан З.; Хаселагер, Пим (2013). «Опрос Asilomar: мнения заинтересованных сторон по этическим проблемам, связанным с взаимодействием мозга и компьютера» . Нейроэтика . 6 (3): 541–578. дои : 10.1007/s12152-011-9132-6 . ISSN 1874-5490 . ПМЦ 3825606 . ПМИД 24273623 .
- ^ «Патент Sony на нейронный интерфейс» . Архивировано из оригинала 7 апреля 2012 года.
- ^ «Игры разума» . Экономист . 23 марта 2007 г.
- ^ «Страница продукта игрового контроллера nia» . Технологическая группа OCZ . Проверено 30 января 2013 г.
- ^ Перейти обратно: а б с Ли С (8 августа 2010 г.). «Чтение мыслей уже на рынке» . Лос-Анджелес Таймс . Архивировано из оригинала 4 января 2013 года.
- ^ Фрулингер, Джошуа (9 октября 2008 г.). «Развлекайтесь с помощью NeuroSky и игры по контролю над разумом Judecca от Square Enix» . Engadget . Проверено 29 мая 2012 г.
- ^ Новые игры, основанные на мозговых волнах . Physorg.com (10 января 2009 г.). Проверено 12 сентября 2010 г.
- ^ Снайдер, Майк (7 января 2009 г.). «Игрушка обучает фанатов «Звездных войн» использованию Силы» . США сегодня . Проверено 1 мая 2010 г.
- ^ «Домашняя страница Эмотив» . Emotiv.com . Проверено 29 декабря 2009 г.
- ^ « Некомими» выбран журналом «Time Magazine / 50 лучших изобретений года» » . Нейроодежда. 22 ноября 2011 г. Архивировано из оригинала 25 января 2012 г.
- ^ «Обновления и новости СПАСАТЕЛЬНОГО КОСТЮМА – Они пойдут» . Theyshallwalk.org . Проверено 19 декабря 2016 г.
- ^ «СмартфонBCI» . Гитхаб . Проверено 5 июня 2018 г.
- ^ "SSVEP_keyboard" . Гитхаб . Проверено 5 апреля 2017 г.
- ^ Проталинский, Эмиль (8 декабря 2020 г.). «NextMind поставляет комплект разработчика интерфейса для мозга и компьютера в реальном времени за 399 долларов» . ВенчурБит . Проверено 8 сентября 2021 г.
- ^ Этерингтон, Даррелл (21 декабря 2020 г.). «Комплект разработчика NextMind для вычислений, управляемых разумом, предлагает редкий «вау»-эффект в сфере технологий» . ТехКранч . Проверено 1 апреля 2024 г.
- ^ "Добро пожаловать, Nextmind!" . ar.snap.com . Проверено 31 мая 2024 г.
- ^ «Дорожная карта – BNCI Horizon 2020» . bnci-horizon-2020.eu . Проверено 5 мая 2019 г.
- ^ Бруннер С., Бирбаумер Н., Бланкерц Б., Гугер С., Кюблер А., Маттиа Д. и др. (2015). «BNCI Horizon 2020: к дорожной карте для сообщества BCI» . Интерфейсы «мозг-компьютер» . 2 : 1–10. дои : 10.1080/2326263X.2015.1008956 . hdl : 1874/350349 . S2CID 15822773 .
- ^ Эллисон Б.З., Данн С., Либ Р., Миллан Дж., Ниджхолт А. (2013). На пути к практическим интерфейсам «мозг-компьютер: преодоление разрыва от исследований к реальным приложениям» . Берлин Гейдельберг: Springer Verlag. ISBN 978-3-642-29746-5 .
- ^ Эдлингер Г., Эллисон Б.З., Гугер С. (2015). «Сколько людей могут использовать систему BCI?». В Кансаку К., Коэн Л., Бирбаумер Н. (ред.). Клинические системы нейронауки . Токио: Pringer Verlag Japan. стр. 33–66. ISBN 978-4-431-55037-2 .
- ^ Шатель С., Ченну С., Нуаром К., Круз Д., Оуэн А.М., Лорейс С. (2012). «Взаимодействие мозг-компьютер при расстройствах сознания». Травма головного мозга . 26 (12): 1510–1522. дои : 10.3109/02699052.2012.698362 . hdl : 2268/162403 . ПМИД 22759199 . S2CID 6498232 .
- ^ Боли М., Массимини М., Гарридо М.И., Госсерис О, Нуаром К., Лорейс С., Содду А. (2012). «Связность мозга при нарушениях сознания». Мозговая связь . 2 (1): 1–10. дои : 10.1089/brain.2011.0049 . hdl : 2268/131984 . ПМИД 22512333 . S2CID 6447538 .
- ^ Гибсон Р.М., Фернандес-Эспехо Д., Гонсалес-Лара Л.Е., Кван Б.И., Ли Д.Х., Оуэн А.М., Круз Д. (2014). «Множественные задачи и методы нейровизуализации повышают вероятность обнаружения скрытого осознания у пациентов с расстройствами сознания» . Границы человеческой неврологии . 8 : 950. дои : 10.3389/fnhum.2014.00950 . ПМК 4244609 . ПМИД 25505400 .
- ^ Рисетти М., Формизано Р., Топпи Дж., Китадамо Л.Р., Бьянки Л., Астольфи Л. и др. (2013). «О выявлении ССП при реабилитации нарушений сознания» . Границы человеческой неврологии . 7 : 775. дои : 10.3389/fnhum.2013.00775 . ПМЦ 3834290 . ПМИД 24312041 .
- ^ Сильвони С., Рамос-Мюргиалдей А., Кавинато М., Вольпато С., Сизотто Г., Туролла А. и др. (октябрь 2011 г.). «Интерфейс мозг-компьютер при инсульте: обзор прогресса». Клиническая ЭЭГ и нейронауки . 42 (4): 245–252. дои : 10.1177/155005941104200410 . ПМИД 22208122 . S2CID 37902399 .
- ^ Лими Д.Д., Косьян Дж., Домижан К., Даффин Дж., Рош Р.А., Комминс С. и др. (январь 2014 г.). «Исследование особенностей ЭЭГ во время восстановления после инсульта - значение нейрореабилитационной терапии, опосредованной BCI» . Журнал нейроинженерии и реабилитации . 11 :9. дои : 10.1186/1743-0003-11-9 . ПМК 3996183 . ПМИД 24468185 .
- ^ Тунг С.В., Гуань С., Анг К.К., Фуа К.С., Ван С., Чжао Л. и др. (июль 2013 г.). «Моторные образы BCI для реабилитации после инсульта верхних конечностей: оценка записей ЭЭГ с использованием когерентного анализа». 2013 35-я ежегодная международная конференция Общества инженерии в медицине и биологии IEEE (EMBC) . Том. 2013. С. 261–264. дои : 10.1109/EMBC.2013.6609487 . ISBN 978-1-4577-0216-7 . ПМИД 24109674 . S2CID 5071115 .
- ^ Бай З, Фонг К.Н., Чжан Дж.Дж., Чан Дж., Тинг К.Х. (апрель 2020 г.). «Непосредственные и долгосрочные эффекты реабилитации верхних конечностей после инсульта на основе BCI: систематический обзор и метаанализ» . Журнал нейроинженерии и реабилитации . 17 (1): 57. дои : 10.1186/s12984-020-00686-2 . ПМЦ 7183617 . ПМИД 32334608 .
- ^ Ремсик А., Янг Б., Вермилия Р., Кихефер Л., Абрамс Дж., Эвандер Элмор С. и др. (май 2016 г.). «Обзор прогресса и будущих последствий интерфейсной терапии мозг-компьютер для восстановления двигательной функции дистальных отделов верхних конечностей после инсульта» . Экспертиза медицинских изделий . 13 (5): 445–454. дои : 10.1080/17434440.2016.1174572 . ПМЦ 5131699 . ПМИД 27112213 .
- ^ Монже-Перейра Э., Ибаньес-Переда Х., Альгуасил-Диего И.М., Серрано Х.И., Спотторно-Рубио М.П., Молина-Руэда Ф. (сентябрь 2017 г.). «Использование электроэнцефалографических систем интерфейса мозг-компьютер в качестве реабилитационного подхода к функции верхних конечностей после инсульта: систематический обзор» . ПМиР . 9 (9): 918–932. дои : 10.1016/j.pmrj.2017.04.016 . ПМИД 28512066 . S2CID 20808455 .
- ^ Сабатиэль Н., Иримия Д.С., Эллисон Б.З., Гугер С., Эдлингер Дж. (17 июля 2016 г.). «Парная ассоциативная стимуляция с интерфейсами мозг-компьютер: новая парадигма реабилитации после инсульта». Основы расширенного познания: нейроэргономика и операционная нейронаука . Конспекты лекций по информатике. Том. 9743. стр. 261–272. дои : 10.1007/978-3-319-39955-3_25 . ISBN 978-3-319-39954-6 .
- ^ Риччио А., Пичиорри Ф., Скеттини Ф., Топпи Дж., Ризетти М., Формизано Р. и др. (2016). «Взаимодействие мозга с компьютером для улучшения общения и реабилитации после повреждения головного мозга». Интерфейсы «мозг-компьютер: лабораторные эксперименты для реальных приложений» . Прогресс в исследованиях мозга. Том. 228. стр. 357–387. дои : 10.1016/bs.pbr.2016.04.018 . ISBN 978-0-12-804216-8 . ПМИД 27590975 .
- ^ Варкути Б., Гуан С., Пан Ю., Фуа К.С., Анг К.К., Куах К.В. и др. (январь 2013 г.). «Изменения функциональной связи в состоянии покоя коррелируют с восстановлением движений при BCI и тренировке верхних конечностей с помощью робота после инсульта». Нейрореабилитация и восстановление нервной системы . 27 (1): 53–62. дои : 10.1177/1545968312445910 . ПМИД 22645108 . S2CID 7120989 .
- ^ Янг Б.М., Нигогосян З., Ремсик А., Уолтон Л.М., Сонг Дж., Наир В.А. и др. (2014). «Изменения в функциональных связях коррелируют с улучшением поведения у пациентов, перенесших инсульт, после терапии с использованием устройства интерфейса мозг-компьютер» . Границы нейроинженерии . 7:25 . дои : 10.3389/fneng.2014.00025 . ПМК 4086321 . ПМИД 25071547 .
- ^ Перейти обратно: а б Юань К., Чен С., Ван Х, Чу В.К., Тонг Р.К. (январь 2021 г.). «Влияние тренировки BCI на хронический инсульт коррелирует с функциональной реорганизацией в моторно-связанных регионах: одновременное исследование ЭЭГ и фМРТ» . Науки о мозге . 11 (1): 56. doi : 10.3390/brainsci11010056 . ПМЦ 7824842 . ПМИД 33418846 .
- ^ Мрачач-Керстинг Н., Фойгт М., Стивенсон А.Дж., Алиакбарыхоссейнабади С., Цзян Н., Дремструп К., Фарина Д. (ноябрь 2017 г.). «Влияние типа афферентной обратной связи, синхронизированной с воображением движений, на индукцию кортикальной пластичности». Исследования мозга . 1674 : 91–100. дои : 10.1016/j.brainres.2017.08.025 . hdl : 10012/12325 . ПМИД 28859916 . S2CID 5866337 .
- ^ Опи Н (2 апреля 2019 г.). «Обзор исследования» . Медицинский университет Мельбурна . Университет Мельбурна . Проверено 5 декабря 2019 г.
- ^ Оксли Т.Дж., Опи Н.Л., Джон С.Е., Ринд Г.С., Ронейн С.М., Уиллер Т.Л. и др. (март 2016 г.). «Минимально инвазивная эндоваскулярная установка стент-электродов для высококачественной постоянной регистрации активности корковых нейронов». Природная биотехнология . 34 (3): 320–327. дои : 10.1038/nbt.3428 . ПМИД 26854476 . S2CID 205282364 .
- ^ «Synchron начинает испытания технологии нейронного интерфейса Stentrode» . Вердикт Медицинские изделия. 22 сентября 2019 года . Проверено 5 декабря 2019 г.
- ^ Радзик И, Мизяк Б, Дудка Дж, Хросциньска-Кравчик М, Чучвар СЮ (июнь 2015 г.). «Перспективы профилактики эпилептогенеза». Фармакологические отчеты . 67 (3): 663–668. дои : 10.1016/j.pharep.2015.01.016 . ПМИД 25933984 . S2CID 31284248 .
- ^ Ритаччо А., Бруннер П., Гундуз А., Гермес Д., Хирш Л.Дж., Джейкобс Дж. и др. (декабрь 2014 г.). «Материалы пятого международного семинара по достижениям электрокортикографии» . Эпилепсия и поведение . 41 : 183–192. дои : 10.1016/j.yebeh.2014.09.015 . ПМК 4268064 . ПМИД 25461213 .
- ^ Ким Д.Х., Вивенти Дж., Амсден Дж.Дж., Сяо Дж., Вигеланд Л., Ким Ю.С. и др. (июнь 2010 г.). «Растворимые пленки фиброина шелка для ультратонкой конформной биоинтегрированной электроники» . Природные материалы . 9 (6): 511–517. Бибкод : 2010NatMa...9..511K . дои : 10.1038/nmat2745 . ПМЦ 3034223 . ПМИД 20400953 .
- ^ Боппарт С.А., Уиллер BC, Уоллес К.С. (январь 1992 г.). «Гибкая перфорированная микроэлектродная матрица для расширенной записи нейронов». Транзакции IEEE по биомедицинской инженерии . 39 (1): 37–42. дои : 10.1109/10.108125 . ПМИД 1572679 . S2CID 36593459 .
- ^ Томпсон Ч., Зоратти М.Дж., Лангхалс Н.Б., Перселл Э.К. (апрель 2016 г.). «Регенеративные электродные интерфейсы для нейронных протезов» . Тканевая инженерия. Часть Б, Обзоры . 22 (2): 125–135. дои : 10.1089/ten.teb.2015.0279 . ПМИД 26421660 .
- ^ Перейти обратно: а б Рабай Дж. М. (сентябрь 2011 г.). «Интерфейсы мозг-машина как новый рубеж экстремальной миниатюризации». 2011 Материалы Европейской конференции по исследованию твердотельных устройств (ESSDERC) . стр. 19–24. дои : 10.1109/essderc.2011.6044240 . ISBN 978-1-4577-0707-0 . S2CID 47542923 .
- ^ Варнеке Б., Ласт М., Либовиц Б., Пистер К.С. (январь 2001 г.). «Умная пыль: общение с компьютером размером кубический миллиметр». Компьютер . 34 (1): 44–51. дои : 10.1109/2.895117 . ISSN 0018-9162 . S2CID 21557 .
Дальнейшее чтение
[ редактировать ]- Брауз, Эндрю. «Руководство для молодежи по мозговой музыке: сорок лет аудиозаписи ЭЭГ человека» . Электронный контакт! 14.2 – Практика биотехнологической эффективности / Pratiques de Performance biotechnologique (июль 2012 г.). Монреаль: ЦИК .
- Гупта, Кота Навин и Рамасвами Паланаппиан. «Использование высокочастотной электроэнцефалограммы в проектах визуальных и слуховых интерфейсов мозг-компьютер» . Электронный контакт! 14.2 – Практика биотехнологической эффективности / Pratiques de Performance biotechnologique (июль 2012 г.). Монреаль: ЦИК .
- Узунян, Гасия. «Трио Biomuse в разговоре: интервью с Р. Бенджамином Кнаппом и Эриком Лайоном» . Электронный контакт! 14.2 – Практика биотехнологической эффективности / Pratiques de Performance biotechnologique (июль 2012 г.). Монреаль: ЦИК .
- 20 лет исследований нейро-машинного интерфейса . Серия «Лаборатория Николелис». Том. 1. 2019. с. 452.
- 20 лет исследований нейро-машинного интерфейса . Серия «Лаборатория Николелис». Том. 2. 2019. с. 436.
Внешние ссылки
[ редактировать ]- Вандельт, Сара К.; Бьонес, Дэвид А.; Пейса, Келси; Ли, Брайан; Лю, Чарльз; Андерсен, Ричард А. (13 мая 2024 г.). «Представление внутренней речи отдельными нейронами надкраевой извилины человека» . Природа человеческого поведения . 8 (6): 1136–1149. дои : 10.1038/s41562-024-01867-y . ISSN 2397-3374 . ПМЦ 11199147 . ПМИД 38740984 .

