Топологии свободы и ограничений

Топологии свободы и ограничений (также известные как топологии свободы, срабатывания и ограничения; или просто ФАКТ). [ 1 ] [ 2 ] [ 3 ] представляет собой механического проектирования структуру , разработанную доктором Джонатаном Б. Хопкинсом . Фреймворк предлагает библиотеку векторных пространств с визуальными представлениями для анализа и синтеза гибких систем. Гибкие системы — это устройства, механизмы или конструкции, которые деформируются для достижения желаемого движения, такие как податливые механизмы , изгибы , мягкие роботы и механические метаматериалы .
История
[ редактировать ]Подход к проектированию FACT был разработан в 2005 году Джонатаном Бригамом Хопкинсом , когда он был студентом магистратуры в профессора Мартина Л. Калпеппера лаборатории прецизионных систем в Массачусетском технологическом институте . Впервые FACT был опубликован в коротком докладе на конференции в материалах 21-го ежегодного собрания Американского общества точного машиностроения в 2006 году. [ 4 ] и позже был подробно опубликован в магистерской диссертации Хопкинса в 2007 году. [ 5 ] ФАКТ был расширен в более поздних работах, таких как докторская диссертация Хопкинса 2010 года.
Альтернативы
[ редактировать ]Другие совместимые методы проектирования механизмов включают генеративное проектирование , анализ псевдотвердого тела, [ 6 ] и другие подходы к проектированию, основанные на ограничениях и [теории винтов]. [ 7 ] описаны В основной статье плюсы и минусы кинематики и структурной оптимизации.
Основы
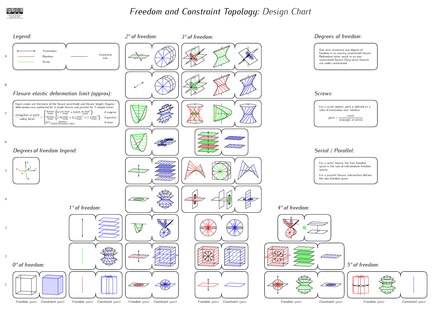
[ редактировать ]FACT сочетает в себе принципы теории винтов , линейной алгебры , проективной геометрии и проектирования с точными ограничениями . В методологии используется библиотека векторных пространств, основанных на этих принципах и представленных геометрическими фигурами. Эти формы делятся на пространства свободы, пространства ограничений и пространства срабатывания, каждое из которых служит уникальной цели в процессе проектирования.
- Пространства свободы представляют собой допустимые деформации системы; степени свободы системы (DOF). Они моделируются как векторы скручивания .
- Пространства ограничений определяют расположение гибких элементов внутри системы, чтобы гарантировать, что она деформируется только по назначению. Каждое пространство ограничений дополняет пространство свободы. Они моделируются как векторы гаечного ключа .
- Пространства исполнительных механизмов определяют расположение, количество и тип исполнительных механизмов в гибкой системе, так что система деформируется по желанию под нагрузкой . Как и пространства ограничений, они моделируются как векторы гаечного ключа. [ 8 ]
Синтез ФАКТОВ
[ редактировать ]Библиотека FACT позволяет обойти все пространство решений гибких систем для любой комбинации степеней свободы . Правила FACT различаются в зависимости от желаемой конфигурации гибкой системы. Ниже приведены основные этапы проектирования подшипника с параллельным изгибом.
- Определите, как должна двигаться сцена. Какие степени свободы (ГРИП) необходимы? (Рис. 1)
- Найдите подходящее пространство свободы в библиотеке FACT (рис. 2).
- Определите пространство ограничений, соответствующее требуемому пространству свободы (рис. 2).
- Выбирайте и располагайте гибкие элементы , удовлетворяющие пространству ограничений. Согласно Максвеллу степени ограничения и степени свободы должны быть равны 6. , чтобы система была точно ограничена, [ 9 ] (Рис. 3)
- Спроектируйте твердые тела и соедините каждое изгибание с каждым телом на их концах. Когда одно тело удерживается неподвижно, оно становится «землёй». Затем другое тело («сцена») достигает выбранной глубины резкости.
Иногда может оказаться желательным чрезмерно ограничить систему, добавив избыточные ограничения в пространство ограничений. Это добавляет жесткости и может потребоваться для симметрии , что может улучшить термическую стабильность .



Ограничения
[ редактировать ]Все гибкие системы могут быть организованы по трем основным конфигурациям – параллельной, последовательной и гибридной. Только ФАКТ охватывает параллельные, последовательные и некоторые гибридные системы.
- Параллельные системы [ 1 ] [ 2 ] [ 3 ] состоят из двух твердых тел, соединенных непосредственно между собой параллельными гибкими элементами.
- Последовательные системы [ 10 ] [ 11 ] состоят из двух или более параллельных систем, расположенных друг над другом или вложенных в цепочку от одного твердого тела к другому.
- Гибридные системы [ 12 ] состоять из любой другой конфигурации комбинаций параллельных и последовательных систем.
- Взаимосвязанные гибридные системы [ 13 ] представляют собой особый вид гибридной конфигурации, в которой промежуточные твердые тела также соединены между собой гибкими элементами, которые создают внутренние петли внутри системы. ФАКТ необходимо дополнить теорией графов . Для работы с такими системами [ 13 ] Механические метаматериалы попадают в эту категорию. [ 14 ]
Дальнейшее обучение
[ редактировать ]ФАКТ освещается в различных образовательных ресурсах:
- Его преподает в аспирантуре Калифорнийского университета в Лос-Анджелесе доктор Хопкинс . [ 15 ]
- Курс доступен на YouTube на канале «ФАКТЫ механического проектирования» в виде серии бесплатных лекций. [ 16 ]
- В книге «Справочник по совместимым механизмам» ФАКТ обсуждается в контексте проектирования совместимых механизмов. [ 17 ]
См. также
[ редактировать ]- Механизм (инжиниринг)
- Степени свободы
- Шесть степеней свободы
- Совместимый механизм
- Инженерный анализ
- Инженерное проектирование
- Кинематика
- Общая топология
- Аксиоматический дизайн
- Чрезмерно ограниченный механизм
Ссылки
[ редактировать ]- ^ Jump up to: а б Хопкинс, Джонатан (2010). «Синтез концепций системы с множеством степеней свободы и параллельной гибкости через топологию свободы и ограничений (ФАКТ) - Часть I: Принципы» . Точное машиностроение . 34 (2): 259–270. doi : 10.1016/j.precisioneng.2009.06.008 .
- ^ Jump up to: а б Хопкинс, Джонатан (2010). «Синтез концепций системы с множеством степеней свободы и параллельной гибкости через топологию свободы и ограничений (ФАКТ) - Часть II: Практика» . Точное машиностроение . 34 (2): 271–278. doi : 10.1016/j.precisioneng.2009.06.007 .
- ^ Jump up to: а б Хауэлл, Ларри (4 февраля 2013 г.). Справочник по механизмам обеспечения соответствия . Оксфорд, Великобритания: John Wiley and Sons Ltd., с. 79-92. ISBN 9781119953456 .
- ^ Хопкинс, Джонатан. «Количественный метод проектирования на основе ограничений для многоосных стадий изгиба для точного позиционирования и оборудования, Протокол 21-го ежегодного собрания Американского общества точного машиностроения (ASPE), Монтерей, Калифорния, октябрь 2006 г.» . CiteSeerX 10.1.1.568.6427 .
- ^ Хопкинс, Джонатан. «Проектирование параллельных гибких систем с помощью топологий свободы и ограничений (FACT), магистерская диссертация, Массачусетский технологический институт» . Библиотеки Массачусетского технологического института. hdl : 1721.1/39879 .
- ^ Дженсен, Брайан Д.; Хауэлл, Ларри Л. (1 декабря 2003 г.). «Идентификация совместимых конфигураций четырехзвенного механизма с псевдожестким телом, приводящих к бистабильному поведению». Журнал механического дизайна . 125 (4): 701–708. дои : 10.1115/1.1625399 .
- ^ Ли, Чэнлинь; Чен, Ши-Чи (1 мая 2023 г.). «Проектирование соответствующих механизмов на основе соответствующих строительных элементов. Часть I: Принципы». Точное машиностроение . 81 : 207–220. doi : 10.1016/j.precisioneng.2023.01.006 .
- ^ Хопкинс, Джонатан (2010). «Основа теории винта для инструментов количественного и графического проектирования, определяющих компоновку приводов для минимизации паразитных ошибок в параллельных гибких системах» . Точное машиностроение . 34 (4): 767–776. doi : 10.1016/j.precisioneng.2010.05.004 .
- ^ Максвелл, Джеймс Клерк; Нивенс, В.Д. (1890). Общие соображения относительно научной аппаратуры в научных статьях Джеймса Клерка Максвелла . Дувр Пресс.
- ^ Хопкинс, Джонатан. «Проектирование этапов движения на основе изгиба для мехатронных систем с помощью топологий свободы, срабатывания и ограничений (FACT), докторская диссертация, Массачусетский технологический институт» . Библиотеки Массачусетского технологического института. hdl : 1721.1/62511 .
- ^ Хопкинс, Джонатан (октябрь 2011 г.). «Синтез прецизионных систем последовательного изгиба с использованием топологий свободы и ограничений (ФАКТ)» . Точное машиностроение . 35 (4): 638–649. doi : 10.1016/j.precisioneng.2011.04.006 .
- ^ Хопкинс, Джонатан (1 октября 2013 г.). «Проектирование гибридных гибких систем и элементов с использованием топологий свободы и ограничений» . Механические науки . 4 (2): 319–331. Бибкод : 2013MecSc...4..319H . дои : 10.5194/ms-4-319-2013 .
- ^ Jump up to: а б Сан, Фредерик (июнь 2017 г.). «Анализ мобильности и ограничений взаимосвязанных гибридных систем изгиба с помощью винтовой алгебры и теории графов» . Журнал механизмов и робототехники . 9 (3): 031018. дои : 10.1115/1.4035993 .
- ^ Шоу, Лукас (январь 2019 г.). «Вычислительно эффективное проектирование направленно податливых метаматериалов» . Природные коммуникации . 10 (1): 291. Бибкод : 2019NatCo..10..291S . дои : 10.1038/s41467-018-08049-1 . ПМК 6336888 . PMID 30655524 .
- ^ «Гибкая исследовательская группа» . Калифорнийский университет в Лос-Анджелесе . Калифорнийский университет, Лос-Анджелес.
- ^ «ФАКТЫ механического проектирования» . Ютуб .
- ^ Хауэлл, Ларри (2013). Справочник по механизмам обеспечения соответствия . Джон Уайли и сыновья. ISBN 978-1-119-95345-6 .