Преобразование Лоренца
| Часть серии о |
| Пространство-время |
|---|
 |
В физике преобразования Лоренца представляют собой шестипараметрическое семейство линейных преобразований из системы координат в пространстве-времени в другую систему координат, которая движется с постоянной скоростью относительно первой. Соответствующее обратное преобразование затем параметризуется отрицательным значением этой скорости. Преобразования названы в честь голландского физика Хендрика Лоренца .
Наиболее распространенная форма преобразования, параметризованная действительной константой. представляющая скорость, ограниченную направлением x , выражается как [1] [2]




Выразив скорость как эквивалентная форма преобразования: [3]


Системы отсчета можно разделить на две группы: инерциальные (относительное движение с постоянной скоростью) и неинерциальные (ускоряющиеся, движущиеся по криволинейным траекториям, вращательное движение с постоянной угловой скоростью и т. д.). Термин «преобразования Лоренца» относится только к преобразованиям между инерциальными системами отсчета, обычно в контексте специальной теории относительности.
В каждой системе отсчета наблюдатель может использовать локальную систему координат (в данном контексте обычно декартовы координаты ) для измерения длин и часы для измерения временных интервалов. Событие — это то, что происходит в определенной точке пространства в определенный момент времени или, более формально, в точке пространства-времени . Преобразования связывают пространственные и временные координаты события , измеренные наблюдателем в каждом кадре. [номер 1]
Они заменяют преобразование Галилея ньютоновской физики , которая предполагает абсолютные пространство и время (см. теорию относительности Галилея ). Преобразование Галилея является хорошим приближением только при относительных скоростях, намного меньших скорости света. Преобразования Лоренца имеют ряд неинтуитивных особенностей, которых нет в преобразованиях Галилея. Например, они отражают тот факт, что наблюдатели, движущиеся с разными скоростями, могут измерять разные расстояния , прошедшее время и даже разный порядок событий , но всегда так, что скорость света одинакова во всех инерциальных системах отсчета. Инвариантность скорости света — один из постулатов специальной теории относительности .
Исторически преобразования были результатом попыток Лоренца и других объяснить, как скорость света не зависит от системы отсчета , и понять симметрию законов электромагнетизма . Преобразования позже стали краеугольным камнем специальной теории относительности .
Преобразование Лоренца является линейным преобразованием . Это может включать в себя вращение пространства; Преобразование Лоренца без вращения называется усилением Лоренца . В пространстве Минковского — математической модели пространства-времени в специальной теории относительности — преобразования Лоренца сохраняют пространственно-временной интервал между любыми двумя событиями. Это свойство является определяющим свойством преобразования Лоренца. Они описывают только преобразования, при которых пространственно-временное событие в начале координат остается фиксированным. Их можно рассматривать как гиперболическое вращение пространства Минковского. Более общий набор преобразований, который также включает в себя переводы, известен как группа Пуанкаре .
История [ править ]
Многие физики, в том числе Вольдемар Фойгт , Джордж Фицджеральд , Джозеф Лармор и Хендрик Лоренц. [4] сам — обсуждал физику, подразумеваемую этими уравнениями, с 1887 года. [5] В начале 1889 года Оливер Хевисайд показал на основе уравнений Максвелла , что электрическое поле, окружающее сферическое распределение заряда, должно перестать иметь сферическую симметрию , когда заряд начинает двигаться относительно светоносного эфира . Затем Фитцджеральд предположил, что результат Хевисайда об искажении можно применить к теории межмолекулярных сил. Несколько месяцев спустя Фитцджеральд опубликовал гипотезу о том, что движущиеся тела сжимаются, чтобы объяснить загадочный результат эксперимента Майкельсона и Морли, проведенного в 1887 году с эфиром и ветром . В 1892 году Лоренц независимо представил ту же идею в более подробной форме, которая впоследствии была названа гипотезой сокращения Фитцджеральда-Лоренца . [6] Их объяснение было широко известно до 1905 года. [7]
Лоренц (1892–1904) и Лармор (1897–1900), верившие в гипотезу светоносного эфира, также искали преобразование, при котором уравнения Максвелла остаются инвариантными при преобразовании из эфира в движущуюся систему отсчета. Они расширили гипотезу сокращения Фитцджеральда-Лоренца и обнаружили, что необходимо также изменить временную координату (« местное время »). Анри Пуанкаре дал физическую интерпретацию местного времени (в первом порядке по v / c , относительная скорость двух систем отсчета, нормированная на скорость света) как следствие синхронизации часов в предположении, что скорость света постоянна. в движущихся кадрах. [8] Считается, что Лармор был первым, кто понял решающее свойство замедления времени, присущее его уравнениям. [9]
В 1905 году Пуанкаре первым признал, что преобразование обладает свойствами математической группы .и он назвал его в честь Лоренца. [10] Позже в том же году Альберт Эйнштейн опубликовал то, что сейчас называется специальной теорией относительности , выведя преобразование Лоренца при предположениях принципа относительности и постоянства скорости света в любой инерциальной системе отсчета и отказавшись от механистического эфира как ненужного. . [11]
Вывод группы преобразований Лоренца [ править ]
Событие — это то , что происходит в определенной точке пространства-времени или, в более общем смысле, в самой точке пространства-времени. В любой инерциальной системе отсчета событие задается временной координатой ct и набором декартовых координат x , y , z для указания положения в пространстве в этой системе отсчета. Нижние индексы отмечают отдельные события.
Эйнштейна Из второго постулата относительности (инвариантности c ) следует, что:
| ( Д1 ) |

во всех инерциальных системах отсчета для событий, связанных световыми сигналами . Величина слева называется пространственно-временным интервалом между событиями a 1 = ( t 1 , x 1 , y 1 , z 1 ) и a 2 = ( t 2 , x 2 , y 2 , z 2 ) . Интервал между любыми двумя событиями, не обязательно разделенными световыми сигналами, на самом деле инвариантен, т. е. не зависит от состояния относительного движения наблюдателей в разных инерциальных системах отсчета, что показывается с помощью однородности и изотропии пространства . Таким образом, искомое преобразование должно обладать свойством, которое:
| ( Д2 ) |
![{\displaystyle {\begin{aligned}&c^{2}(t_{2}-t_{1})^{2}-(x_{2}-x_{1})^{2}-(y_{2 }-y_{1})^{2}-(z_{2}-z_{1})^{2}\\[6pt]={}&c^{2}(t_{2}'-t_{1 }')^{2}-(x_{2}'-x_{1}')^{2}-(y_{2}'-y_{1}')^{2}-(z_{2}' -z_{1}')^{2}\quad {\text{(все события 1, 2)}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d685ef5891f02b82c2656cc341f2016d231c4549)
где ( t , x , y , z ) — координаты пространства-времени, используемые для определения событий в одном кадре, а ( t ’, x ’, y ’, z ’) — координаты в другом кадре. Прежде всего заметим, что ( D2 ) выполняется, если произвольная четверка чисел b добавляется к событиям a 1 и a 2 . Такие преобразования называются перемещениями пространства-времени и далее здесь не рассматриваются. Затем можно заметить, что линейное решение, сохраняющее начало более простой задачи, решает и общую задачу:
| ( Д3 ) |
![{\displaystyle {\begin{aligned}&c^{2}t^{2}-x^{2}-y^{2}-z^{2}=c^{2}t'^{2}- x'^{2}-y'^{2}-z'^{2}\\[6pt]{\text{or}}\quad &c^{2}t_{1}t_{2}-x_{ 1}x_{2}-y_{1}y_{2}-z_{1}z_{2}=c^{2}t'_{1}t'_{2}-x'_{1}x '_{2}-y'_{1}y'_{2}-z'_{1}z'_{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f78e5280c899e10f32769743cf58e272651c33e4)
(решение, удовлетворяющее первой формуле, автоматически удовлетворяет и второй; см. поляризационное тождество ). Поиск решения более простой задачи — это всего лишь вопрос поиска в теории классических групп , сохраняющих билинейные формы различной сигнатуры. [номер 2] Первое уравнение в ( D3 ) можно записать более компактно как:
| ( Д4 ) |

где (·, ·) относится к билинейной форме сигнатуры (1, 3) на R 4 раскрывается формулой правой части в ( D3 ). Альтернативное обозначение, определенное справа, называется релятивистским скалярным произведением . Пространство-время математически рассматривается как R 4 известно как пространство Минковского M. наделенное этой билинейной формой , Таким образом, преобразование Лоренца является элементом группы O(1, 3) , группы Лоренца или, для тех, кто предпочитает другую метрическую сигнатуру , O(3, 1) (также называемой группой Лоренца). [номер 3] У одного есть:
| ( Д5 ) |

что и есть сохранение билинейной формы ( D3 ), из чего следует (в силу линейности Λ и билинейности формы), что ( D2 ) выполняется. Элементами группы Лоренца являются вращения , повышения и их сочетания. Если учитывать сдвиги пространства-времени, то получается неоднородная группа Лоренца или группа Пуанкаре .
Общие сведения [ править ]
Отношения между координатами пространства-времени со штрихом и без штриха представляют собой преобразования Лоренца , каждая координата в одной системе отсчета является линейной функцией всех координат в другой системе отсчета, а обратные функции представляют собой обратное преобразование. В зависимости от того, как кадры движутся относительно друг друга и как они ориентированы в пространстве относительно друг друга, в уравнения преобразования входят и другие параметры, описывающие направление, скорость и ориентацию.
Преобразования, описывающие относительное движение с постоянной (равномерной) скоростью и без вращения осей пространственных координат, называются бустами Лоренца или просто бустами , а параметром преобразования является относительная скорость между кадрами. Другой основной тип преобразования Лоренца - это вращение только в пространственных координатах, подобные ускорениям являются инерционными преобразованиями, поскольку относительного движения нет, рамки просто наклонены (а не вращаются непрерывно), и в этом случае величины, определяющие вращение, являются параметры преобразования (например, представление оси-угла или углы Эйлера и т. д.). Комбинация вращения и повышения представляет собой однородное преобразование , которое преобразует начало координат обратно в начало координат.
Полная группа Лоренца O(3, 1) также содержит специальные преобразования, которые не являются ни поворотами, ни ускорениями, а скорее отражениями в плоскости, проходящей через начало координат. Можно выделить два из них; пространственная инверсия , при которой пространственные координаты всех событий меняются местами, и временная инверсия , при которой временная координата каждого события меняет знак.
Ускорения не следует путать с простыми перемещениями в пространстве-времени; в этом случае системы координат просто смещаются и относительного движения нет. Однако они также считаются симметриями, обусловленными специальной теорией относительности, поскольку они оставляют пространственно-временной интервал неизменным. Комбинация вращения с ускорением, за которым следует сдвиг пространства-времени, представляет собой неоднородное преобразование Лоренца , элемент группы Пуанкаре, которую еще называют неоднородной группой Лоренца.
формулировка Физическая повышения Лоренца
Преобразование координат [ править ]

Вверху: кадр F ′ движется со скоростью v вдоль оси x кадра F .
Внизу: кадр F движется со скоростью − v вдоль оси x ′ кадра F ′ . [12]
«Неподвижный» наблюдатель в системе координат F определяет события с координатами t , x , y , z . Другая система отсчета F ′ движется со скоростью v относительно F , и наблюдатель в этой «движущейся» системе отсчета F ′ определяет события с помощью координат t ′, x ′, y ′, z ′ .
Оси координат в каждом кадре параллельны ( оси x и x ' параллельны, оси y и y ' параллельны, а оси z и z ' параллельны), остаются взаимно перпендикулярными, а относительное движение происходит вдоль совпадающих xx ' оси. При t = t ′ = 0 начало обеих систем координат одинаковое: ( x, y, z ) = ( x ′, y ′, z ′) = (0, 0, 0) . Другими словами, время и положение на этом мероприятии совпадают. Если все это верно, то говорят, что системы координат находятся в стандартной конфигурации или синхронизированы .
Если наблюдатель в F записывает событие t , x , y , z , то наблюдатель в F ′ записывает то же событие с координатами [13]
где v — относительная скорость между кадрами в направлении x , c — скорость света , а

Здесь v — параметр преобразования, для данного буста это постоянное число, но может принимать непрерывный диапазон значений. В используемой здесь установке положительная относительная скорость v > 0 — это движение вдоль положительных направлений осей xx ′ , нулевая относительная скорость v = 0 — отсутствие относительного движения, а отрицательная относительная скорость v < 0 — относительное движение вдоль отрицательных направлений оси xx ' . Величина относительной скорости v не может равняться или превышать c только субсветовые скорости — c < v < c , поэтому допускаются . Соответствующий диапазон γ составляет 1 ≤ γ < ∞ .
Преобразования не определены, если v находится за пределами этих пределов. При скорости света ( v = c ) γ бесконечно, а быстрее света ( v > c ) γ — комплексное число , каждое из которых делает преобразования нефизическими. Пространственные и временные координаты являются измеримыми величинами и численно должны быть действительными числами.
В качестве активного преобразования наблюдатель в F' замечает, что координаты события «увеличиваются» в отрицательных направлениях осей xx ' из-за - v в преобразованиях. Это имеет эквивалентный эффект системы координат F', усиленной в положительных направлениях осей xx ' , в то время как событие не меняется и просто представляется в другой системе координат, пассивное преобразование .
Обратные отношения ( t , x , y , z через t ', x ', y ', z ' ) можно найти путем алгебраического решения исходного набора уравнений. Более эффективный способ — использовать физические принципы. Здесь F ′ — «неподвижный» кадр, а F — «движущийся» кадр. Согласно принципу относительности, не существует привилегированной системы отсчета, поэтому преобразования из F ' в F должны принимать точно такую же форму, как преобразования из F в F ' . Единственная разница в том, что F движется со скоростью − v относительно F ′ (т. е. относительная скорость имеет ту же величину, но противоположно направлена). Таким образом, если наблюдатель в F ′ отмечает событие t ′, x ′, y ′, z ′ , то наблюдатель в F отмечает то же событие с координатами

а значение γ остается неизменным. Этот «трюк» простого изменения направления относительной скорости с сохранением ее величины и замены штрихованных и нештрихованных переменных всегда применим для нахождения обратного преобразования каждого повышения в любом направлении.
Иногда удобнее использовать β = v / c (строчная бета ) вместо v , так что

Преобразования Лоренца также можно получить способом, напоминающим круговые вращения в трехмерном пространстве, с использованием гиперболических функций . Для повышения в направлении x результаты следующие:

где ζ (строчная дзета ) — параметр, называемый быстротой (используется множество других символов, включая θ, φ, φ, η, ψ, ξ ). Учитывая сильное сходство с поворотами пространственных координат в трехмерном пространстве в декартовых плоскостях xy, yz и zx, усиление Лоренца можно рассматривать как гиперболическое вращение координат пространства-времени в декартовых плоскостях xt, yt и zt. 4D пространство Минковского . Параметр ζ — это гиперболический угол поворота, аналогичный обычному углу кругового вращения. Это преобразование можно проиллюстрировать диаграммой Минковского .
Гиперболические функции возникают из разницы между квадратами времени и пространственных координат в пространственно-временном интервале, а не из суммы. Геометрическое значение гиперболических функций можно визуализировать, приняв x = 0 или ct = 0 в преобразованиях . Возводя в квадрат и вычитая результаты, можно получить гиперболические кривые постоянных значений координат, но изменяющихся ζ , что параметризует кривые по тождеству

И наоборот, оси ct и x могут быть построены для переменных координат, но постоянного ζ . Определение


Сравнивая преобразования Лоренца по относительной скорости и быстроте или используя приведенные выше формулы, связи между β , γ и ζ таковы:

Взятие обратного гиперболического тангенса дает быстроту

Поскольку −1 < β < 1 , отсюда следует −∞ < ζ < ∞ . Из соотношения между ζ и β положительная быстрота ζ > 0 — это движение вдоль положительных направлений осей xx ′ , нулевая быстрота ζ = 0 — отсутствие относительного движения, а отрицательная быстрота ζ < 0 — относительное движение вдоль отрицательных направлений оси. хх ' оси.
Обратные преобразования получаются путем замены величин со штрихом и без штриха для переключения систем координат и отрицания быстроты ζ → - ζ, поскольку это эквивалентно отрицанию относительной скорости. Поэтому,

Обратные преобразования можно аналогичным образом визуализировать, рассмотрев случаи, когда x ′ = 0 и ct ′ = 0 .
До сих пор преобразования Лоренца применялись к одному событию . Если есть два события, между ними существует пространственное разделение и временной интервал. преобразований Лоренца следует Из линейности , что можно выбрать два значения пространственных и временных координат, к каждому применить преобразования Лоренца, а затем вычесть их, чтобы получить преобразования Лоренца разностей;


где Δ ( дельта в верхнем регистре ) указывает на разницу величин; например, Δ x = x 2 − x 1 для двух значений координат x и так далее.
Эти преобразования различий, а не пространственных точек или моментов времени, полезны по ряду причин:
- в расчетах и экспериментах измеряются или представляют интерес длины между двумя точками или интервалами времени (например, длина движущегося транспортного средства или время, необходимое для перемещения из одного места в другое),
- преобразования скорости можно легко получить, сделав разницу бесконечно малой и разделив уравнения, и повторив процесс для преобразования ускорения,
- если системы координат никогда не совпадают (т. е. не находятся в стандартной конфигурации), и если оба наблюдателя могут договориться о событии t 0 , x 0 , y 0 , z 0 в F и t 0 ′, x 0 ′, y 0 ′ , z 0 ′ в F ′ , то они могут использовать это событие в качестве начала координат, а разности координат пространства-времени — это разности между их координатами и этим началом координат, например, Δ x = x − x 0 , Δ x ′ = x ′ − х 0 ' и т. д.
Физические последствия
Критическим требованием преобразований Лоренца является неизменность скорости света, факт, использованный при их выводе и содержащийся в самих преобразованиях. Если в F уравнение для импульса света вдоль направления x имеет вид x = ct , то в F ′ преобразования Лоренца дают x ′ = ct ′ , и наоборот, для любого − c < v < c .
Для относительных скоростей, намного меньших скорости света, преобразования Лоренца сводятся к преобразованию Галилея.

Три нелогичных, но правильных предсказания преобразований таковы:
- Относительность одновременности
- Предположим, что два события происходят вдоль оси x одновременно ( Δ t = 0 ) в F , но разделены ненулевым смещением Δ x . Тогда в F ′ мы находим, что , поэтому события больше не являются одновременными с точки зрения движущегося наблюдателя.
- Замедление времени
- находятся часы в состоянии покоя Предположим, что в F . Если временной интервал измеряется в одной и той же точке этого кадра, так что Δ x = 0 , то преобразования дают этот интервал в F ′ как Δ t ′ = γ Δ t . покоятся часы Обратно, предположим, что в F ′ . Если интервал измеряется в одной и той же точке этого кадра, так что Δ x ′ = 0 , то преобразования дают этот интервал в F по формуле Δ t = γ Δ t ′ . В любом случае, каждый наблюдатель измеряет временной интервал между тиканьями движущихся часов так, чтобы он был в γ раз длиннее , чем временной интервал между тиканьями его собственных часов.
- Сокращение длины
- находится стержень, Предположим, что в F выровненный вдоль оси x, длиной Δ x . В F ′ стержень движется со скоростью - v , поэтому его длину необходимо измерить, выполнив два одновременных ( Δ t ′ = 0 ) измерения на противоположных концах. В этих условиях обратное преобразование Лоренца показывает, что Δ x = γ Δ x ′ . В F поскольку стержень покоится в F. два измерения больше не происходят одновременно, но это не имеет значения , Таким образом, каждый наблюдатель измеряет расстояние между конечными точками движущегося стержня так, чтобы оно было в 1/ γ раз короче , чем конечные точки идентичного стержня, покоящегося в его собственной системе отсчета. Сокращение длины влияет на любую геометрическую величину, связанную с длиной, поэтому с точки зрения движущегося наблюдателя площади и объемы также будут уменьшаться в направлении движения.

Векторные преобразования [ править ]
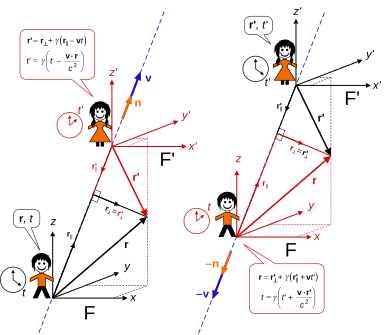
Слева: Стандартная конфигурация. Справа: обратная конфигурация.
Использование векторов позволяет компактно выражать положения и скорости в произвольных направлениях. Одиночный импульс в любом направлении зависит от полного вектора относительной скорости v с величиной | в | = v , который не может быть равен или превышать c , так что 0 ≤ v < c .
Изменяются только время и координаты, параллельные направлению относительного движения, а координаты, перпендикулярные, — нет. Имея это в виду, разделите вектор пространственного положения r, измеренный в F , и r ′ , измеренный в F′ , каждый на компоненты, перпендикулярные (⊥) и параллельные (‖) v ,


Вводя единичный вектор n = v / v = β / β в направлении относительного движения, относительная скорость равна v = v n с величиной v и направлением n , а векторная проекция и отклонение дают соответственно

Накопление результатов дает полные преобразования,

Проекция и отклонение также применимы к r ′ . Для обратных преобразований поменяйте местами r и r ′ , чтобы переключить наблюдаемые координаты, и отмените относительную скорость v → − v (или просто единичный вектор n → − n, поскольку величина v всегда положительна), чтобы получить

Единичный вектор имеет то преимущество, что упрощает уравнения для одного повышения, позволяет либо v, либо β, восстановить когда это удобно, а параметризация быстроты немедленно получается путем замены β и βγ . Для многократного буста это не удобно.
Векторное соотношение между относительной скоростью и быстротой: [15]


Преобразование скоростей [ править ]
Определение координатных скоростей и фактора Лоренца по формуле

взятие дифференциалов по координатам и времени векторных преобразований, а затем деление уравнений приводит к
![{\displaystyle \mathbf {u} '={\frac {1}{1-{\frac {\mathbf {v} \cdot \mathbf {u} {c^{2}}}}}\left[{ \frac {\mathbf {u} }{\gamma _{\mathbf {v} }}}-\mathbf {v} +{\frac {1}{c^{2}}}{\frac {\gamma _ {\mathbf {v} }}{\gamma _ {\mathbf {v} }+1}}\left(\mathbf {u} \cdot \mathbf {v} \right)\mathbf {v} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d9ce52162b9b5960496a83093a8241a3736852c)
Скорости u и u ′ — это скорость некоторого массивного объекта. Они также могут быть для третьей инерциальной системы отсчета (скажем F »), и в этом случае они должны быть постоянными . Обозначим любой объект через X. Тогда X движется со скоростью u относительно F или, что то же самое, со скоростью u ' относительно F', в свою очередь F' движется со скоростью v относительно F. Обратные преобразования можно получить аналогичным образом: или, как и в случае с координатами положения, поменяйте местами u и u ′ и измените v на − v .
Преобразование скорости полезно в звездной аберрации , эксперименте Физо и релятивистском эффекте Доплера .
Преобразования ускорения Лоренца можно получить аналогичным образом, взяв дифференциалы векторов скорости и разделив их на дифференциал времени.
Преобразование других величин [ править ]
В общем, для данных четырех величин A и Z = ( Z x , Z y , Z z ) и их усиленных по Лоренцу аналогов A ′ и Z ′ = ( Z ′ x , Z ′ y , Z ′ z ) соотношение форма


Разложение Z (и Z ′ ) на компоненты, перпендикулярные и параллельные v , точно такое же, как и для вектора положения, как и процесс получения обратных преобразований (обмен ( A , Z ) и ( A ′, Z ′) переключить наблюдаемые величины и изменить направление относительного движения на противоположное путем замены n ↦ − n ).
Величины ( A , Z ) вместе составляют четырехвектор , где A — «времяподобный компонент», а Z — «пространственноподобный компонент». Примеры A и Z :
| Четырехвекторный | А | С |
|---|---|---|
| Позиция четырехвекторная | Время (умноженное на с ), кт | Вектор положения , r |
| Четырехимпульсный | Энергия (деленная на c ), E / c | Импульс , п |
| Четырехволновой вектор | угловая частота (деленная на c ), ω / c | волновой вектор , к |
| Четырехспиновый | (Без имени), с т | Вращение , с |
| Четырехточечный | Плотность заряда (умноженная на c ), ρc | Плотность тока , Дж |
| Электромагнитный четырехпотенциальный | Электрический потенциал (деленный на c ), φ / c | Магнитный векторный потенциал , А |
Для данного объекта (например, частицы, жидкости, поля, материала), если A или Z соответствуют свойствам, специфичным для объекта, таким как его плотность заряда , плотность массы , спин и т. д., его свойства могут быть зафиксированы в системе покоя этот объект. Тогда преобразования Лоренца придают соответствующие свойства в системе отсчета, движущейся относительно объекта с постоянной скоростью. Это нарушает некоторые представления, которые считаются само собой разумеющимися в нерелятивистской физике. Например, энергия E объекта является скаляром в нерелятивистской механике, но не в релятивистской механике, поскольку энергия изменяется при преобразованиях Лоренца; ее значение различно для различных инерциальных систем отсчета. В системе покоя объекта он имеет энергию покоя и нулевой импульс. В усиленном кадре его энергия другая, и кажется, что он имеет импульс. Точно так же в нерелятивистской квантовой механике спин частицы является постоянным вектором, но в релятивистской квантовой механике спин s зависит от относительного движения. В системе покоя частицы псевдовектор спина можно зафиксировать как ее обычный нерелятивистский спин с нулевой времениподобной величиной. st . , однако усиленный наблюдатель увидит ненулевой времениподобный компонент и измененный спин [16]
Не все величины инвариантны в форме, показанной выше, например, орбитальный момент L не имеет времениподобной величины, равно как и электрическое поле E , и магнитное поле B. угловой Определение углового момента таково: L = r × p , а в усиленной системе отсчета измененный угловой момент равен L ′ = r ′ × p ′ . Применение этого определения с использованием преобразований координат и импульса приводит к преобразованию углового момента. Оказывается L преобразуется с другой векторной величиной N = ( E / c 2 ) r − t p, связанное с ускорением, см. в разделе «Релятивистский угловой момент» подробности . В случае полей E и B преобразования невозможно получить напрямую с помощью векторной алгебры. Сила Лоренца является определением этих полей, и в F это F = q ( E + v × B ) , а в F ′ это F ′ = q ( E ′ + v ′ × B ′) . Метод эффективного получения преобразований электромагнитного поля, который также иллюстрирует единицы измерения электромагнитного поля, использует тензорную алгебру, приведенную ниже .
формулировка Математическая
Везде заглавные буквы, выделенные курсивом и нежирные, представляют собой матрицы 4×4, а буквы, выделенные не курсивом, — это матрицы 3×3.
Однородная группа Лоренца [ править ]
Запись координат в вектор-столбцах и метрики Минковского η в виде квадратной матрицы



Набор Лоренца всех преобразований в этой статье обозначено . Этот набор вместе с умножением матриц образует группу , в данном контексте известную как группа Лоренца . Кроме того, приведенное выше выражение X · X представляет собой квадратичную форму сигнатуры (3,1) в пространстве-времени, а группа преобразований, которая оставляет эту квадратичную форму инвариантной, представляет собой неопределенную ортогональную группу O(3,1), группу Ли . Другими словами, группа Лоренца равна O(3,1). Как представлено в этой статье, любые упомянутые группы Ли являются матричными группами Ли . В этом контексте операция композиции сводится к умножению матриц .


Из инвариантности пространственно-временного интервала следует

![{\displaystyle \left[\det(\Lambda)\right]^{2}=1\quad \Rightarrow \quad \det(\Lambda)=\pm 1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/644cba522b579c35fc5d0bf38af241b989dde40f)
Записав метрику Минковского в виде блочной матрицы, а преобразование Лоренца в самом общем виде:



Отрицательное неравенство может быть неожиданным, поскольку Γ умножает временную координату, и это влияет на временную симметрию . Если выполнено положительное равенство, то Γ является фактором Лоренца.
Определитель и неравенство обеспечивают четыре способа классификации ( преобразований Лоренца ) здесь для краткости LT . Любая конкретная ЛП имеет только один знак определителя и только одно неравенство. Существует четыре набора, которые включают в себя все возможные пары, заданные пересечениями ( «n»-образный символ, означающий «и») этих классифицирующих наборов.
| Пересечение, ∩ | Антихронные (или неортохронные) LT | Ортохронные LT |
|---|---|---|
| Правильные LT | Правильные антихронные LT | Правильные ортохронные LT |
| Неправильные LT | Неправильные антихронные LT | Неправильные ортохронные LT |








где «+» и «-» обозначают знак определителя, а «↑» для ≥ и «↓» для ≤ обозначают неравенства.
Полная группа Лоренца распадается на объединение («u»-образный символ, означающий «или») четырех непересекающихся множеств .

Подгруппа замкнута группы должна быть той же операцией группы (здесь умножение матриц). Другими словами, для двух преобразований Лоренца Λ и L из определенной подгруппы составные преобразования Лоренца Λ L и L Λ должны находиться в той же подгруппе, что и Λ и L . Это не всегда так: композиция двух антихронных преобразований Лоренца ортохронна, а композиция двух несобственных преобразований Лоренца — собственная. Другими словами, пока множества , , , и все образуют подгруппы, множества, содержащие несобственные и/или антихронные преобразования без достаточного количества собственных ортохронных преобразований (например, , , ) не образуют подгрупп.







Правильные преобразования [ править ]
Если лоренц-ковариантный 4-вектор измерен в одной инерциальной системе отсчета с результатом , и то же измерение, выполненное в другой инерциальной системе отсчета (с той же ориентацией и началом координат), дает результат , два результата будут связаны соотношением






где - величина скорости и является фактором Лоренца. Эта формула представляет собой пассивное преобразование, поскольку описывает, как координаты измеряемой величины изменяются от незаштрихованной системы к штрихованной системе координат. Активное преобразование определяется выражением .



Если кадр F ' увеличивается со скоростью u относительно кадра F , а другой кадр F ' увеличивается со скоростью v относительно F ' , то отдельные повышения будут


Если u и v не коллинеарны, а направлены в разные стороны, ситуация существенно усложняется. Повышение Лоренца в разных направлениях не коммутирует: B ( v ) B ( u ) и B ( u ) B ( v ) не равны. Хотя каждая из этих композиций не является единичным повышением, каждая композиция по-прежнему является преобразованием Лоренца, поскольку сохраняет пространственно-временной интервал. Оказывается, композиция любых двух усилений Лоренца эквивалентна усилению, за которым или которому предшествует вращение пространственных координат, в форме R ( ρ ) B ( w ) или B ( w ) R ( ρ ) . w переменные и w — составные скорости , а ρ и ρ — параметры вращения (например, оси-угла , углы Эйлера и т. д.). Вращение в форме блочной матрицы просто

В этой статье представление оси-угла используется для ρ . Вращение происходит вокруг оси в направлении единичного вектора e на угол θ (положительный против часовой стрелки, отрицательный по часовой стрелке, согласно правилу правой руки ). «Вектор оси-угла»

Сами по себе пространственные вращения также являются преобразованиями Лоренца, поскольку они оставляют пространственно-временной интервал неизменным. Как и ускорения, последовательные вращения вокруг разных осей не коммутируют. В отличие от усилений, комбинация любых двух вращений эквивалентна одному вращению. Некоторые другие сходства и различия между матрицами повышения и вращения включают в себя:
- inverses : B ( v ) −1 = B (− v ) (относительное движение в противоположном направлении) и R ( θ ) −1 = R (− θ ) (вращение в обратную сторону вокруг той же оси)
- тождественное преобразование для отсутствия относительного движения/вращения: B ( 0 ) = R ( 0 ) = I
- единицы определитель : det( B ) = det( R ) = +1 . Это свойство делает их правильными преобразованиями.
- симметрия матрицы : B симметричен (равен транспонированию ), а R несимметричен, но ортогонален (транспонирован равняется обратному , R Т = Р −1 ).
Наиболее общее правильное преобразование Лоренца Λ( v , θ ) включает в себя одновременно повышение и вращение и является несимметричной матрицей. В особых случаях Λ( 0 , θ ) = R ( θ ) и Λ ( v , 0 ) = B ( v ) . Явный вид общего преобразования Лоренца записывать громоздко и здесь приводиться не будет. Тем не менее, выражения в замкнутой форме для матриц преобразования будут приведены ниже с использованием теоретико-групповых аргументов. Будет проще использовать параметризацию быстроты для повышения, и в этом случае пишут Λ( ζ , θ ) и B ( ζ ) .
Группа Ли СО + (3,1) [ править ]
Набор трансформаций

Для простоты взгляните на бесконечно малое усиление Лоренца в направлении x (исследование повышения в любом другом направлении или вращения вокруг любой оси следует идентичной процедуре). Бесконечно малое повышение - это небольшое повышение, отличающееся от идентичности, полученное путем разложения Тейлора матрицы повышения до первого порядка относительно ζ = 0 ,


На данный момент K x определяется этим результатом (его значение будет объяснено позже). В пределе бесконечного числа бесконечно малых шагов конечное преобразование буста в виде матричной экспоненты. получается


Вектор оси-угла θ и вектор быстроты ζ представляют собой шесть непрерывных переменных, которые составляют параметры группы (в этом конкретном представлении), а генераторами группы являются K = ( K x , K y , K z ) и J = ( J x , J y , J z ) , каждые векторы матриц с явными формами [номер 6]
![{\displaystyle {\begin{alignedat}{3}K_{x}&={\begin{bmatrix}0&1&0&0\\1&0&0&0\\0&0&0&0\\0&0&0&0\\\end{bmatrix}}\,,\quad &K_{y }&={\begin{bmatrix}0&0&1&0\\0&0&0&0\\1&0&0&0\\0&0&0&0\end{bmatrix}}\,,\quad &K_{z}&={\begin{bmatrix}0&0&0&1\\0&0&0&0\\0&0&0&0\ \1&0&0&0\end{bmatrix}}\\[10mu]J_{x}&={\begin{bmatrix}0&0&0&0\\0&0&0&0\\0&0&0&-1\\0&0&1&0\\\end{bmatrix}}\,,\quad &J_{y}&={\begin{bmatrix}0&0&0&0\\0&0&0&1\\0&0&0&0\\0&-1&0&0\end{bmatrix}}\,,\quad &J_{z}&={\begin{bmatrix}0&0&0&0\\ 0&0&-1&0\\0&1&0&0\\0&0&0&0\end{bmatrix}}\end{alignedat}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef8328def4199ca17bbbd9aa048bb59b78d0dd8b)
Все они определяются аналогично K x выше, хотя знаки минус в повышающих генераторах являются обычными. Физически генераторы группы Лоренца соответствуют важным симметриям в пространстве-времени: J — генераторы вращения , соответствующие угловому моменту , а K — буст-генераторы , соответствующие движению системы в пространстве-времени. Производная любой гладкой кривой C ( t ) с C (0) = I в группе, зависящей от некоторого параметра группы t относительно этого параметра группы, оцененного при t = 0 , служит определением соответствующего генератора группы G , и это отражает бесконечно малую трансформацию от идентичности. Гладкую кривую всегда можно рассматривать как экспоненту, поскольку экспонента всегда плавно отображает G обратно в группу через t → exp( tG ) для всех t ; эта кривая снова даст G при дифференцировании при t = 0 .
Разложение экспонент в ряд Тейлора дает


Было заявлено, что общее собственное преобразование Лоренца является продуктом ускорения и вращения. На бесконечно малом уровне произведение


Обратное также верно, но разложение конечного общего преобразования Лоренца на такие множители нетривиально. В частности,

Алгебра Ли so(3,1) [ править ]
Генераторы Лоренца можно складывать или умножать на действительные числа, чтобы получить больше генераторов Лоренца. Другими словами, совокупность всех генераторов Лоренца

Три коммутационных соотношения генераторов Лоренца:
![{\displaystyle [J_{x},J_{y}]=J_{z}\,,\quad [K_{x},K_{y}]=-J_{z}\,,\quad [J_{x },K_{y}]=K_{z}\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b6995567bdc143f734b5511a2db9d6809eb2ed30)
Эти коммутационные соотношения и векторное пространство образующих удовлетворяют определению алгебры Ли. . Таким образом, алгебра Ли определяется как векторное пространство V над полем чисел и с бинарной операцией [ , ] (в данном контексте называемой скобкой Ли ) над элементами векторного пространства, удовлетворяющей аксиомам билинейности , альтернация и тождество Якоби . Здесь операция [, ] — это коммутатор, который удовлетворяет всем этим аксиомам, векторное пространство — это набор генераторов Лоренца V, как указано ранее, а поле — это набор действительных чисел.

Связь терминологии, используемой в математике и физике: Генератор группы — это любой элемент алгебры Ли. Групповой параметр — это компонента координатного вектора, представляющая произвольный элемент алгебры Ли относительно некоторого базиса. Таким образом, базис — это набор образующих, являющийся базисом алгебры Ли в обычном смысле векторного пространства.
Экспоненциальное отображение алгебры Ли в группу Ли,

Неправильные преобразования [ править ]
Преобразования Лоренца также включают инверсию четности.


Если Λ — собственное ортохронное преобразование Лоренца, то T Λ — несобственное антихронное, P Λ — несобственное ортохронное и TP Λ = PT Λ — собственное антихронное.
Неоднородная группа Лоренца [ править ]
Две другие пространственно-временные симметрии не были учтены. Чтобы пространственно-временной интервал был инвариантным, его можно показать [18] что необходимо и достаточно, чтобы преобразование координат имело вид

Тензорная формулировка
Контравариантные векторы [ править ]
Записав общее матричное преобразование координат в виде матричного уравнения


где нижние и верхние индексы обозначают ковариантные и контравариантные компоненты соответственно, [21] и соглашение о суммировании применяется . Стандартным соглашением является использование греческих индексов, которые принимают значение 0 для компонентов времени и 1, 2, 3 для компонентов пространства, тогда как латинские индексы просто принимают значения 1, 2, 3 для пространственных компонентов (противоположное для Ландау и Лифшиц). Обратите внимание, что первый индекс (читается слева направо) соответствует в матричной записи индексу строки . Второй индекс соответствует индексу столбца.
Матрица преобразования универсальна для всех четырехвекторов , а не только для четырехмерных координат пространства-времени. Если A — любой четырехвектор, то в тензорных индексных обозначениях

Альтернативно, пишут


Ковариантные векторы [ править ]
Существуют также векторные величины с ковариантными индексами. Они обычно получаются из соответствующих им объектов с контравариантными индексами посредством операции понижения индекса ; например,



Но

То есть это ( μ , ν ) -компонента обратного преобразования Лоренца. Определяют (в виде обозначений),


Теперь о тонкости. Подразумеваемое суммирование в правой части


Это означает, что ковариантные векторы (считающиеся матрицами-столбцами) преобразуются в соответствии с двойственным представлением стандартного представления группы Лоренца. Это понятие обобщается на общие представления, просто замените Λ на Π(Λ) .
Тензоры [ править ]
Если A и B — линейные операторы в векторных пространствах и V , то линейный оператор A ⊗ B может быть определен на тензорном произведении U U и V , обозначенном U ⊗ V согласно [22]
(Т1)

Отсюда сразу ясно, что если u и v — четырехвекторы в V , то u ⊗ v ∈ T 2 V ≡ V ⊗ V преобразуется как
(Т2)

На втором этапе используется билинейность тензорного произведения, а на последнем шаге определяется 2-тензор на компонентной форме, или, скорее, он просто переименовывает тензор u ⊗ v .
Эти наблюдения очевидным образом обобщаются на большее количество факторов, и, используя тот факт, что общий тензор в векторном пространстве V можно записать как сумму коэффициентов (компонент!), умноженных на тензорные произведения базисных векторов и базисных ковекторов, можно прийти к закон преобразования для любой тензорной величины T . Это дано [23]
(Т3)

где Λ x′ п определено выше. Эту форму обычно можно свести к форме для общих n -компонентных объектов, приведенной выше, с одной матрицей ( Π(Λ) ), работающей с векторами-столбцами. Эта последняя форма иногда предпочтительнее; например, для тензора электромагнитного поля.
Трансформация электромагнитного поля [ править ]
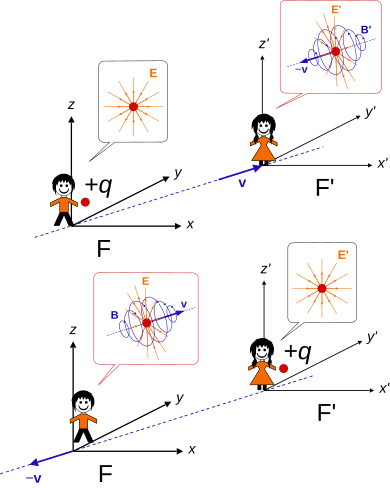
Преобразования Лоренца также можно использовать, чтобы проиллюстрировать, что магнитное поле B и электрическое поле E являются просто разными аспектами одной и той же силы — электромагнитной силы , как следствие относительного движения между электрическими зарядами и наблюдателями. [24] Тот факт, что электромагнитное поле проявляет релятивистские эффекты, становится очевидным, если провести простой мысленный эксперимент. [25]
- Наблюдатель измеряет заряд в состоянии покоя в системе отсчета F. Наблюдатель обнаружит статическое электрическое поле. Поскольку заряд в этой системе координат неподвижен, электрический ток отсутствует, поэтому наблюдатель не наблюдает никакого магнитного поля.
- Другой наблюдатель в системе F 'движется со скоростью v относительно F и заряда. Этот наблюдатель видит другое электрическое поле, потому что заряд движется со скоростью − v в системе покоя. Движение заряда соответствует электрическому току , поэтому наблюдатель в системе F' также видит магнитное поле.
Электрические и магнитные поля трансформируются иначе, чем пространство и время, но точно так же, как релятивистский угловой момент и вектор ускорения.
Тензор напряженности электромагнитного поля имеет вид


Общий закон преобразования (Т3) принимает вид

Для магнитного поля получаем

Результаты по электрическому полю

Здесь β = ( β , 0, 0) используется . Эти результаты можно обобщить



Сокращение длины влияет на плотность заряда ρ и плотность тока J , а замедление времени влияет на скорость потока заряда (тока), поэтому распределения заряда и тока должны соответствующим образом трансформироваться при повышении напряжения. Оказывается, они трансформируются точно так же, как четыре вектора пространства-времени и энергии-импульса:

или, в более простом геометрическом представлении,

Плотность заряда преобразуется как временная составляющая четырехвектора. Это вращательный скаляр. Плотность тока является 3-векторной.
Уравнения Максвелла инвариантны относительно преобразований Лоренца.
Спиноры [ править ]
Уравнение (T1) остается неизменным для любого представления группы Лоренца, включая биспинорное представление. В (T2) просто заменяются все вхождения Λ биспинорным представлением Π(Λ) ,
(Т4)

Приведенное выше уравнение могло бы, например, представлять собой преобразование состояния в пространстве Фока, описывающее два свободных электрона.
Трансформация общих полей [ править ]
Общее невзаимодействующее многочастичное состояние (состояние пространства Фока) в квантовой теории поля преобразуется по правилу [28]
| ( 1 ) |
![{\displaystyle {\begin{aligned}&U(\Lambda,a)\Psi _{p_{1}\sigma _{1}n_{1};p_{2}\sigma _{2}n_{2}; \cdots }\\={}&e^{-ia_{\mu }\left[(\Lambda p_{1})^{\mu }+(\Lambda p_{2})^{\mu }+\cdots \right]}{\sqrt {\frac {(\Lambda p_{1})^{0}(\Lambda p_{2})^{0}\cdots }{p_{1}^{0}p_{2 }^{0}\cdots }}}\left(\sum _{\sigma _{1}'\sigma _{2}'\cdots }D_{\sigma _{1}'\sigma _{1}} ^{(j_{1})}\left[W(\Lambda ,p_{1})\right]D_{\sigma _{2}'\sigma _{2}}^{(j_{2})} \left[W(\Lambda ,p_{2})\right]\cdots \right)\Psi _{\Lambda p_{1}\sigma _{1}'n_{1};\Lambda p_{2}\ сигма _{2}'n_{2};\cdots },\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3b8eb18b9a1a818885bf7f841ef3cfae600ebd8)
где W (Λ, p ) — вигнеровское вращение , а D ( Дж ) является (2 j + 1) -мерным представлением SO(3) .
См. также [ править ]
- Фигурное исчисление
- Электромагнитное поле
- преобразование Галилея
- Гиперболическое вращение
- группа Лоренца
- Теория представлений группы Лоренца
- Принцип относительности
- Формула сложения скоростей
- Алгебра физического пространства
- Релятивистская аберрация
- Преобразование Прандтля – Глауэрта
- Сплит-комплексное число
- Гировекторное пространство
Сноски [ править ]
- ^ Можно представить, что в каждой инерциальной системе отсчета есть наблюдатели, расположенные в пространстве, каждый из которых имеет синхронизированные часы и находится в состоянии покоя в определенной инерциальной системе отсчета. Эти наблюдатели затем отчитываются в центральный офис, где собираются все отчеты. Когда говорят о конкретном наблюдателе, имеется в виду тот, кто имеет, по крайней мере в принципе, копию этого отчета. См., например, Сард (1970) .
- ^ Отдельные требования трех уравнений приводят к трем различным группам. Второе уравнение удовлетворяется для сдвигов пространства-времени в дополнение к преобразованиям Лоренца, приводящим к группе Пуанкаре или неоднородной группе Лоренца . Первое уравнение (или второе, ограниченное светоподобным разделением) приводит к еще большей группе — конформной группе пространства-времени.
- ^ Группы O(3, 1) и O(1, 3) изоморфны. Широко распространено мнение, что выбор между двумя метрическими сигнатурами не имеет физического значения, хотя некоторые объекты, относящиеся к O(3, 1) и O(1, 3) соответственно, например, алгебры Клиффорда, соответствующие различным сигнатурам билинейные формы, связанные с двумя группами, неизоморфны.
- ^ Для двух квадратных матриц A и B ) det( AB = det( A )det( B )
- ^ Явно,
- ^ В квантовой механике , релятивистской квантовой механике и квантовой теории поля для этих матриц используется другое соглашение; все правые части умножаются на коэффициент мнимой единицы i = √ −1 .
- ^ До сих пор термин «вектор» относился исключительно к « евклидову вектору », примерами являются положение r , скорость v и т. д. Термин «вектор» применяется гораздо шире, чем евклидовы векторы, векторы-строки или столбцы и т. д., см. Линейный алгебра и векторное пространство для деталей. Генераторы группы Ли также образуют векторное пространство над полем чисел (например, вещественных чисел , комплексных чисел ), поскольку линейная комбинация генераторов также является генератором. Они просто живут в другом пространстве, чем векторы положения в обычном трехмерном пространстве.
- ^ В обычном трехмерном позиционном пространстве вектор положения r = x e x + y e y + z e z выражается как линейная комбинация декартовых единичных векторов e x , e y , e z, которые образуют базис, и декартовых единичных векторов e x , e y , e z , которые образуют базис, и декартовых координаты x, y, z являются координатами относительно этого базиса.


Примечания [ править ]
- ^ Рао, К.Н. Шриниваса (1988). Группы вращения и Лоренца и их представления для физиков (иллюстрированное издание). Джон Уайли и сыновья. п. 213. ИСБН 978-0-470-21044-4 . Уравнение 6-3.24, стр. 210
- ^ Форшоу и Смит, 2009 г.
- ^ Коттингем и Гринвуд 2007 , с. 21
- ^ Лоренц 1904 г.
- ^ О'Коннор и Робертсон, 1996 г.
- ^ Браун 2003
- ^ Ротман 2006 , стр. 112f.
- ^ Дарригол 2005 , стр. 1–22
- ^ Макроссан 1986 , стр. 232–34.
- ^ Ссылка находится в следующей статье: Пуанкаре 1905 , стр. 1504–1508.
- ^ Эйнштейн 1905 , стр. 891–921.
- ^ Янг и Фридман, 2008 г.
- ^ Форшоу и Смит, 2009 г.
- ^ Эйнштейн 1916 г.
- ^ Барут 1964 , с. 18–19
- ^ Чайчян и Хагедорн 1997 , с. 239
- ^ Фурри, Вашингтон (1 ноября 1955 г.). «Преобразование Лоренца и прецессия Томаса» . Американский журнал физики . 23 (8): 517–525. Бибкод : 1955AmJPh..23..517F . дои : 10.1119/1.1934085 . ISSN 0002-9505 .
- ^ Вайнберг 1972 г.
- ^ Вайнберг 2005 , стр. 55–58.
- ^ Олссон 2011 , стр. 3–9.
- ^ Деннери и Кшивицкий 2012 , стр. 138.
- ^ Зал 2003 , Глава 4
- ^ Кэрролл 2004 , с. 22
- ^ Грант и Филлипс, 2008 г.
- ^ Гриффитс 2007
- ^ Джексон 1975 , с. [ нужна страница ]
- ^ Миснер, Торн и Уиллер, 1973 г.
- ^ Вайнберг 2002 , Глава 3.
Ссылки [ править ]
Веб-сайты [ править ]
- О'Коннор, Джон Дж.; Робертсон, Эдмунд Ф. (1996), История специальной теории относительности
- Браун, Харви Р. (2003), Майкельсон, Фитцджеральд и Лоренц: новый взгляд на истоки теории относительности
Документы [ править ]
- Кушинг, Дж. Т. (1967). «Векторные преобразования Лоренца» . Американский журнал физики . 35 (9): 858–862. Бибкод : 1967AmJPh..35..858C . дои : 10.1119/1.1974267 .
- Макфарлейн, Эй Джей (1962). «Об ограниченной группе Лоренца и гомоморфно связанных с ней группах». Журнал математической физики . 3 (6): 1116–1129. Бибкод : 1962JMP.....3.1116M . дои : 10.1063/1.1703854 . hdl : 2027/mdp.39015095220474 .
- Ротман, Тони (2006), «Затерянные в тени Эйнштейна» (PDF) , American Scientist , 94 (2): 112f
- Дарригол, Оливье (2005), «Происхождение теории относительности» (PDF) , Séminaire Poincaré , 1 : 1–22, Бибкод : 2006eins.book....1D , doi : 10.1007/3-7643-7436- 5_1 , ISBN 978-3-7643-7435-8
- Макроссан, Майкл Н. (1986), «Заметки об относительности до Эйнштейна» , Бр. Дж. Филос. наук. , 37 (2): 232–34, CiteSeerX 10.1.1.679.5898 , doi : 10.1093/bjps/37.2.232 , заархивировано из оригинала 29 октября 2013 г. , получено 2 апреля 2007 г.
- Пуанкаре, Анри (1905), , Comptes Rendus Hebdomadaires des Séances de l'Académie des Sciences , 140 : 1504–1508.
- Эйнштейн, Альберт (1905), «К электродинамике движущихся тел» (PDF) , Annals of Physics , 322 (10): 891–921, Бибкод : 1905AnP...322..891E , doi : 10.1002/andp.19053221004 . См. также: английский перевод .
- Лоренц, Хендрик Антон (1904). . Труды Королевской Нидерландской академии искусств и наук . 6 : 809–831.
- Эйнштейн, А. (1916). Теория относительности: специальная и общая теория . Проверено 23 января 2012 г. Эйнштейн, А. (1916). Теория относительности: специальная и общая теория . Нью-Йорк: Three Rivers Press (опубликовано в 1995 г.). ISBN 978-0-517-88441-6 – через Справочный архив Альберта Эйнштейна.
- Унгар, А.А. (1988). «Вращение Томаса и параметризация группы преобразований Лоренца». Основы физики письма . 1 (1): 55–89. Бибкод : 1988FoPhL...1...57U . дои : 10.1007/BF00661317 . ISSN 0894-9875 . S2CID 121240925 . уравнение (55).
- Унгар, А.А. (1989). «Парадокс релятивистского скоростного состава и вращение Томаса». Основы физики . 19 (11): 1385–1396. Бибкод : 1989FoPh...19.1385U . дои : 10.1007/BF00732759 . S2CID 55561589 .
- Унгар, А.А. (2000). «Релятивистский принцип взаимности составных скоростей». Основы физики . 30 (2): 331–342. CiteSeerX 10.1.1.35.1131 . дои : 10.1023/А:1003653302643 . S2CID 118634052 .
- Мокану, CI (1986). «Некоторые трудности в рамках релятивистской электродинамики». Архив электротехники . 69 (2): 97–110. дои : 10.1007/bf01574845 . S2CID 123543303 .
- Мокану, CI (1992). «О парадоксе релятивистского скоростного состава и вращении Томаса». Основы физики . 5 (5): 443–456. Бибкод : 1992FoPhL...5..443M . дои : 10.1007/bf00690425 . S2CID 122472788 .
- Вайнберг, С. (2002). Квантовая теория полей, том I. Издательство Кембриджского университета . ISBN 978-0-521-55001-7 .
Книги [ править ]
- Барут, Асим Орхан (1964). Электродинамика и классическая теория полей и частиц . Макмиллан. ISBN 978-0-486-64038-9 .
- Деннери, Филипп; Кшивицкий, Андре (2012). Математика для физиков . Курьерская корпорация. ISBN 978-0-486-15712-2 .
- Коттингем, Западная Нью-Йорк; Гринвуд, Д.А. (2007). Введение в стандартную модель физики элементарных частиц (2-е изд.). Издательство Кембриджского университета. ISBN 978-1-139-46221-1 .
- Янг, HD; Фридман, РА (2008). Университетская физика - с современной физикой (12-е изд.). Пирсон Аддисон-Уэсли. ISBN 978-0-321-50130-1 .
- Халперн, А. (1988). 3000 решенных задач по физике . Серия Шаум. Мак Грау Хилл. п. 688. ИСБН 978-0-07-025734-4 .
- Форшоу, младший; Смит, АГ (2009). Динамика и относительность . Манчестерская серия по физике. John Wiley & Sons Ltd., стр. 124–126. ISBN 978-0-470-01460-8 .
- Уилер, Дж.А. ; Тейлор, Э. Ф. (1971). Физика пространства-времени . Фриман. ISBN 978-0-7167-0336-5 .
- Уилер, Дж.А. ; Торн, Канзас ; Миснер, CW (1973). Гравитация . Фриман. ISBN 978-0-7167-0344-0 .
- Кэрролл, С.М. (2004). Пространство-время и геометрия: введение в общую теорию относительности (иллюстрированное издание). Эддисон Уэсли. п. 22. ISBN 978-0-8053-8732-2 .
- Грант, И.С.; Филлипс, WR (2008). «14». Электромагнетизм . Манчестерская физика (2-е изд.). Джон Уайли и сыновья. ISBN 978-0-471-92712-9 .
- Гриффитс, диджей (2007). Введение в электродинамику (3-е изд.). Pearson Education, Дорлинг Киндерсли. ISBN 978-81-7758-293-2 .
- Холл, Брайан С. (2003). Группы Ли, алгебры Ли и представления. Элементарное введение . Спрингер . ISBN 978-0-387-40122-5 .
- Вайнберг, Стивен (1972). Гравитация и космология: принципы и приложения общей теории относительности . Уайли. ISBN 978-0-471-92567-5 .
- Вайнберг, С. (2008), Космология , Wiley, ISBN 978-0-19-852682-7
- Вайнберг, С. (2005), Квантовая теория полей (3 тома) , том. 1, Издательство Кембриджского университета, ISBN 978-0-521-67053-1
- Олссон, Т. (2011), Релятивистская квантовая физика , издательство Кембриджского университета, ISBN 978-0-521-76726-2
- Гольдштейн, Х. (1980) [1950]. Классическая механика (2-е изд.). Ридинг MA: Аддисон-Уэсли . ISBN 978-0-201-02918-5 .
- Джексон, JD (1975) [1962]. «Глава 11» . Классическая электродинамика (2-е изд.). Джон Уайли и сыновья . стр. 542–545 . ISBN 978-0-471-43132-9 .
- Ландау, LD ; Лифшиц, Э.М. (2002) [1939]. Классическая теория полей . Курс теоретической физики . Том. 2 (4-е изд.). Баттерворт-Хайнеманн . стр. 9–12. ISBN 0-7506-2768-9 .
- Фейнман, Р.П .; Лейтон, РБ ; Сэндс, М. (1977) [1963]. «15». Фейнмановские лекции по физике . Том. 1. Эддисон Уэсли. ISBN 978-0-201-02117-2 .
- Фейнман, Р.П .; Лейтон, РБ ; Сэндс, М. (1977) [1964]. «13». Фейнмановские лекции по физике . Том. 2. Эддисон Уэсли. ISBN 978-0-201-02117-2 .
- Миснер, Чарльз В .; Торн, Кип С .; Уилер, Джон Арчибальд (1973). Гравитация . Сан-Франциско: WH Freeman . ISBN 978-0-7167-0344-0 .
- Риндлер, В. (2006) [2001]. «Глава 9». Специальная, общая и космологическая теория относительности (2-е изд.). Даллас: Издательство Оксфордского университета . ISBN 978-0-19-856732-5 .
- Райдер, Л.Х. (1996) [1985]. Квантовая теория поля (2-е изд.). Кембридж: Издательство Кембриджского университета . ISBN 978-0521478144 .
- Сард, Р.Д. (1970). Релятивистская механика - Специальная теория относительности и классическая динамика частиц . Нью-Йорк: WA Бенджамин. ISBN 978-0805384918 .
- Сексл, RU; Урбантке, Гонконг (2001) [1992]. Теория относительности, Группы частиц. Специальная теория относительности и релятивистская симметрия в физике поля и элементарных частиц . Спрингер. ISBN 978-3211834435 .
- Гургульон, Эрик (2013). Специальная теория относительности в общих рамках: от частиц к астрофизике . Спрингер. п. 213. ИСБН 978-3-642-37276-6 .
- Чайчян, Масуд; Хагедорн, Рольф (1997). Симметрия в квантовой механике: От момента импульса к суперсимметрии . ИоП. п. 239. ИСБН 978-0-7503-0408-5 .
- Ландау, LD ; Лифшиц, Э.М. (2002) [1939]. Классическая теория полей . Курс теоретической физики. Том. 2 (4-е изд.). Баттерворт-Хайнеманн . ISBN 0-7506-2768-9 .
Дальнейшее чтение [ править ]
- Эрнст, А.; Сюй, Ж.-П. (2001), «Первое предложение Фойгта 1887 года об универсальной скорости света» (PDF) , Китайский журнал физики , 39 (3): 211–230, Бибкод : 2001ChJPh..39..211E , заархивировано из оригинала ( PDF) от 16 июля 2011 г.
- Торнтон, Стивен Т.; Мэрион, Джерри Б. (2004), Классическая динамика частиц и систем (5-е изд.), Бельмонт, [Калифорния]: Brooks/Cole, стр. 546–579, ISBN 978-0-534-40896-1
- Фойгт, Вольдемар (1887), «О принципе Доплера», Новости Королевского научного общества в Геттингене , 2 : 41–51.
Внешние ссылки [ править ]
- Вывод преобразований Лоренца . Эта веб-страница содержит более подробный вывод преобразования Лоренца с особым акцентом на групповые свойства.
- Парадокс специальной теории относительности . Эта веб-страница представляет проблему, решением которой является преобразование Лоренца, графически представленное на следующей странице.
- Относительность. Архивировано 29 августа 2011 г. в Wayback Machine - глава из онлайн-учебника.
- Деформационный симулятор специальной теории относительности . Компьютерная программа, демонстрирующая преобразования Лоренца на предметах повседневного пользования.
- Анимационный клип на YouTube, визуализирующий преобразование Лоренца.
- Видео MinutePhysics на YouTube, объясняющее и визуализирующее преобразование Лоренца с помощью механической диаграммы Минковского.
- Интерактивный график на Desmos (график), показывающий преобразования Лоренца с виртуальной диаграммой Минковского
- Интерактивный график на Desmos, показывающий преобразования Лоренца с точками и гиперболами.
- Кадры Лоренца, анимация Джона де Пиллиса. Онлайн Flash-анимации систем Галилея и Лоренца, различных парадоксов, явлений ЭМ-волн и т. д .
| Базы данных органов управления : Национальные |
|---|