Беспилотный летательный аппарат





Беспилотный летательный аппарат ( БПЛА ), широко известный как дрон , представляет собой летательный аппарат без пилота , экипажа или пассажиров на борту. БПЛА изначально разрабатывались в двадцатом веке для слишком «скучных, грязных или опасных» военных задач. [ 1 ] для людей, и к двадцать первому году они стали важным активом для большинства военных. По мере совершенствования технологий управления и снижения затрат их использование распространилось на многие невоенные применения. [ 2 ] К ним относятся аэрофотосъемка , охват территории, [ 3 ] точное земледелие , мониторинг лесных пожаров, [ 4 ] мониторинг рек, [ 5 ] [ 6 ] экологический мониторинг , [ 7 ] [ 8 ] [ 9 ] [ 10 ] полиция и наблюдение, проверки инфраструктуры, контрабанда, [ 11 ] поставки продукции , развлечения и гонки дронов .
Терминология
[ редактировать ]Многие термины используются для обозначения самолетов, которые летают без людей на борту.
The term drone has been used from the early days of aviation, some being applied to remotely flown target aircraft used for practice firing of a battleship's guns, such as the 1920s Fairey Queen and 1930s de Havilland Queen Bee. Later examples included the Airspeed Queen Wasp and Miles Queen Martinet, before ultimate replacement by the GAF Jindivik.[12] The term remains in common use. In addition to the software, autonomous drones also employ a host of advanced technologies that allow them to carry out their missions without human intervention, such as cloud computing, computer vision, artificial intelligence, machine learning, deep learning, and thermal sensors.[13] For recreational uses, an aerial photography drone is an aircraft that has first-person video, autonomous capabilities, or both.[14]
An unmanned aerial vehicle (UAV) is defined as a "powered, aerial vehicle that does not carry a human operator, uses aerodynamic forces to provide vehicle lift, can fly autonomously or be piloted remotely, can be expendable or recoverable, and can carry a lethal or nonlethal payload".[15] UAV is a term that is commonly applied to military use cases.[16] Missiles with warheads are generally not considered UAVs because the vehicle itself is a munition, but certain types of propeller-based missile are often called "kamikaze drones" by the public and media. Also, the relation of UAVs to remote controlled model aircraft is unclear,[citation needed] UAVs may or may not include remote-controlled model aircraft. Some jurisdictions base their definition on size or weight; however, the US FAA defines any unmanned flying craft as a UAV regardless of size. [citation needed] A similar term is remotely piloted aerial vehicle (RPAV).
UAVs or RPAVs can also be seen as a component of an unmanned aircraft system (UAS), which also includes a ground-based controller and a system of communications with the aircraft.[4] The term UAS was adopted by the United States Department of Defense (DoD) and the United States Federal Aviation Administration (FAA) in 2005 according to their Unmanned Aircraft System Roadmap 2005–2030.[17] The International Civil Aviation Organization (ICAO) and the British Civil Aviation Authority adopted this term, also used in the European Union's Single European Sky (SES) Air Traffic Management (ATM) Research (SESAR Joint Undertaking) roadmap for 2020.[18] This term emphasizes the importance of elements other than the aircraft. It includes elements such as ground control stations, data links and other support equipment. Similar terms are unmanned aircraft vehicle system (UAVS) and remotely piloted aircraft system (RPAS).[19] Many similar terms are in use. Under new regulations which came into effect 1 June 2019, the term RPAS has been adopted by the Canadian Government to mean "a set of configurable elements consisting of a remotely piloted aircraft, its control station, the command and control links and any other system elements required during flight operation".[20]
Classification types
[edit]UAVs may be classified like any other aircraft, according to design configuration such as weight or engine type, maximum flight altitude, degree of operational autonomy, operational role, etc. According to the United States Department of Defense, UAVs are classified into five categories below:[21][22]
| Group: | Group 1 | Group 2 | Group 3 | Group 4 | Group 5 |
|---|---|---|---|---|---|
| Size | Small | Medium | Large | Larger | Largest |
| Max take-off wt | < 20 lb (9.1 kg) |
> 20 & < 55 | > 55 & < 1320 | >1,320 lb (600 kg) |
>1,320 lb (600 kg) |
| Operating altitude | < 1,200 ft (370 m) |
< 3,500 ft (1,100 m) |
< 18,000 ft (5,500 m) |
< 18,000 ft (5,500 m) |
> 18,000 ft (5,500 m) |
| Speed | < 100 kn (190 km/h) |
< 250 kn (460 km/h) |
< 250 kn (460 km/h) |
Any speed | Any speed |
Other classifications of UAVs include:[21]
Range and endurance
[edit]There are usually five categories when UAVs are classified by range and endurance:[21]
| Category: | Very close range UAVs | Close range UAVs | Short range UAVs | Medium range UAVs | Long range UAVs |
|---|---|---|---|---|---|
| Range (km): | < 5 | > 5 & < 50 | > 50 & < 150 | > 150 & < 650 | > 650 |
| Endurance (hr): | 0.5 – 0.75 | 1–6 | 8–12 | 12 – 36 or 48 | > 36 or 48 |
Size
[edit]There are usually four categories when UAVs are classified by size, with at least one of the dimensions (length or wingspan) meet the following respective limits:[21]
| Category: | Micro/Very small UAVs | Mini/Small UAVs | Medium UAVs | Large UAVs |
|---|---|---|---|---|
| Length/Wingspan: | < 50 cm | > 50 cm & < 2 m | 5 –10 m | > 10 m |
Weight
[edit]Based on their weight, drones can be classified into 5 categories—
| Category: | Nano | Micro air vehicles (MAV) | Miniature UAV or Small (SUAV) | Medium UAVs | Large UAVs |
|---|---|---|---|---|---|
| Weight: | < 250 gm | ≥ 250 gm & <02 kg | ≥ 02 kg & <25 kg | ≥ 25 kg & <150 kg | ≥ 150 kg |
.[23]
Degree of autonomy
[edit]Drones could also be classified based on the degree of autonomy in their flight operations. ICAO classifies unmanned aircraft as either remotely piloted aircraft or fully autonomous.[24] Some UAVs offer intermediate degrees of autonomy. For example, a vehicle may be remotely piloted in most contexts but have an autonomous return-to-base operation. Some aircraft types may optionally fly manned or as UAVs, which may include manned aircraft transformed into manned or Optionally Piloted UAVs (OPVs). The flight of UAVs may operate under remote control by a human operator, as remotely piloted aircraft (RPA), or with various degrees of autonomy, such as autopilot assistance, up to fully autonomous aircraft that have no provision for human intervention.[25][26]
Altitude
[edit]Based on the altitude, the following UAV classifications have been used at industry events such as ParcAberporth Unmanned Systems forum:
- Hand-held 2,000 ft (600 m) altitude, about 2 km range
- Close 5,000 ft (1,500 m) altitude, up to 10 km range
- NATO type 10,000 ft (3,000 m) altitude, up to 50 km range
- Tactical 18,000 ft (5,500 m) altitude, about 160 km range
- MALE (medium altitude, long endurance) up to 30,000 ft (9,000 m) and range over 200 km
- HALE (high altitude, long endurance) over 30,000 ft (9,100 m) and indefinite range
- Hypersonic high-speed, supersonic (Mach 1–5) or hypersonic (Mach 5+) 50,000 ft (15,200 m) or suborbital altitude, range over 200 km
- Orbital low Earth orbit (Mach 25+)
- CIS Lunar Earth-Moon transfer
- Computer Assisted Carrier Guidance System (CACGS) for UAVs
Composite criteria
[edit]An example of classification based on the composite criteria is U.S. Military's unmanned aerial systems (UAS) classification of UAVs based on weight, maximum altitude and speed of the UAV component.
Power Sources
[edit]UAVs can be classified based on their power or energy source, which significantly impacts their flight duration, range, and environmental impact. The main categories include:
- Battery-powered (Electric): These UAVs use rechargeable batteries, offering quiet operation and lower maintenance but potentially limited flight times. The reduced noise levels make them suitable for urban environments and sensitive operations.[27]
- Fuel-powered (Internal Combustion): Utilizing traditional fuels like gasoline or diesel, these UAVs often have longer flight times but may be noisier and require more maintenance. They are typically used for applications requiring extended endurance or heavy payload capacity.[28]
- Hybrid: Combining electric and fuel power sources, hybrid UAVs aim to balance the benefits of both systems for improved performance and efficiency. This configuration allows for versatility in mission profiles and adaptability to different operational requirements.[29]
- Solar-powered: Equipped with solar panels, these UAVs can potentially achieve extended flight times by harnessing solar energy, especially at high altitudes. Solar-powered UAVs are particularly suited for long-endurance missions and environmental monitoring applications.[30]
- Nuclear-powered: While nuclear power has been explored for larger aircraft, its application in UAVs remains largely theoretical due to safety concerns and regulatory challenges. Research in this area is ongoing but faces significant hurdles before practical implementation.[31]
- Hydrogen Fuel Cell: An emerging technology, hydrogen fuel cells offer the potential for longer flight times with zero emissions, though the technology is still developing for widespread UAV use. The high energy density of hydrogen makes it a promising option for future UAV propulsion systems.[32]
History
[edit]



Early drones
[edit]The earliest recorded use of an unmanned aerial vehicle for warfighting occurred in July 1849,[34] with a balloon carrier (the precursor to the aircraft carrier)[35] in the first offensive use of air power in naval aviation.[36][37][38] Austrian forces besieging Venice attempted to launch some 200 incendiary balloons at the besieged city. The balloons were launched mainly from land; however, some were also launched from the Austrian ship SMS Vulcano. At least one bomb fell in the city; however, due to the wind changing after launch, most of the balloons missed their target, and some drifted back over Austrian lines and the launching ship Vulcano.[39][40][41]
In 1903, Spanish engineer Leonardo Torres Quevedo introduced a radio-based control-system called the Telekino[42] at the Paris Academy of Science, as a way of testing an airship of his own design without risking human lives.[43][44]
Significant development of drones started in the 1900s, and originally focused on providing practice targets for training military personnel. The earliest attempt at a powered UAV was A. M. Low's "Aerial Target" in 1916.[45] Low confirmed that Geoffrey de Havilland's monoplane was the one that flew under control on 21 March 1917 using his radio system.[46] Following this successful demonstration in the spring of 1917 Low was transferred to develop aircraft controlled fast motor launches D.C.B.s with the Royal Navy in 1918 intended to attack shipping and port installations and he also assisted Wing Commander Brock in preparations for the Zeebrugge Raid. Other British unmanned developments followed, leading to the fleet of over 400 de Havilland 82 Queen Bee aerial targets that went into service in 1935.
Nikola Tesla described a fleet of uncrewed aerial combat vehicles in 1915.[47] These developments also inspired the construction of the Kettering Bug by Charles Kettering from Dayton, Ohio and the Hewitt-Sperry Automatic Airplane – initially meant as an uncrewed plane that would carry an explosive payload to a predetermined target. Development continued during World War I, when the Dayton-Wright Airplane Company invented a pilotless aerial torpedo that would explode at a preset time.[48]
The film star and model-airplane enthusiast Reginald Denny developed the first scaled remote piloted vehicle in 1935.[45]
Soviet researchers experimented with controlling Tupolev TB-1 bombers remotely in the late 1930s.[49]
World War II
[edit]In 1940, Denny started the Radioplane Company and more models emerged during World War II – used both to train antiaircraft gunners and to fly attack-missions. Nazi Germany produced and used various UAV aircraft during the war, like the Argus As 292 and the V-1 flying bomb with a jet engine. Fascist Italy developed a specialised drone version of the Savoia-Marchetti SM.79 flown by remote control, although the Armistice with Italy was enacted prior to any operational deployment.[50]
Postwar period
[edit]After World War II development continued in vehicles such as the American JB-4 (using television/radio-command guidance), the Australian GAF Jindivik and Teledyne Ryan Firebee I of 1951, while companies like Beechcraft offered their Model 1001 for the U.S. Navy in 1955.[45] Nevertheless, they were little more than remote-controlled airplanes until the Vietnam War. In 1959, the U.S. Air Force, concerned about losing pilots over hostile territory, began planning for the use of uncrewed aircraft.[51] Planning intensified after the Soviet Union shot down a U-2 in 1960. Within days, a highly classified UAV program started under the code name of "Red Wagon".[52] The August 1964 clash in the Tonkin Gulf between naval units of the U.S. and the North Vietnamese Navy initiated America's highly classified UAVs (Ryan Model 147, Ryan AQM-91 Firefly, Lockheed D-21) into their first combat missions of the Vietnam War.[53] When the Chinese government[54] showed photographs of downed U.S. UAVs via Wide World Photos,[55] the official U.S. response was "no comment".
During the War of Attrition (1967–1970) in the Middle East, Israeli intelligence tested the first tactical UAVs installed with reconnaissance cameras, which successfully returned photos from across the Suez Canal. This was the first time that tactical UAVs that could be launched and landed on any short runway (unlike the heavier jet-based UAVs) were developed and tested in battle.[56]
In the 1973 Yom Kippur War, Israel used UAVs as decoys to spur opposing forces into wasting expensive anti-aircraft missiles.[57] After the 1973 Yom Kippur war, a few key people from the team that developed this early UAV joined a small startup company that aimed to develop UAVs into a commercial product, eventually purchased by Tadiran and leading to the development of the first Israeli UAV.[58][pages needed]
In 1973, the U.S. military officially confirmed that they had been using UAVs in Southeast Asia (Vietnam).[59] Over 5,000 U.S. airmen had been killed and over 1,000 more were missing or captured. The USAF 100th Strategic Reconnaissance Wing flew about 3,435 UAV missions during the war[60] at a cost of about 554 UAVs lost to all causes. In the words of USAF General George S. Brown, Commander, Air Force Systems Command, in 1972, "The only reason we need (UAVs) is that we don't want to needlessly expend the man in the cockpit."[61] Later that year, General John C. Meyer, Commander in Chief, Strategic Air Command, stated, "we let the drone do the high-risk flying ... the loss rate is high, but we are willing to risk more of them ...they save lives!"[61]
During the 1973 Yom Kippur War, Soviet-supplied surface-to-air missile-batteries in Egypt and Syria caused heavy damage to Israeli fighter jets. As a result, Israel developed the IAI Scout as the first UAV with real-time surveillance.[62][63][64] The images and radar decoys provided by these UAVs helped Israel to completely neutralize the Syrian air defenses at the start of the 1982 Lebanon War, resulting in no pilots downed.[65] In Israel in 1987, UAVs were first used as proof-of-concept of super-agility, post-stall controlled flight in combat-flight simulations that involved tailless, stealth-technology-based, three-dimensional thrust vectoring flight-control, and jet-steering.[66]
Modern UAVs
[edit]
With the maturing and miniaturization of applicable technologies in the 1980s and 1990s, interest in UAVs grew within the higher echelons of the U.S. military. The U.S. funded the Counterterrorism Center (CTC) within the CIA, which sought to fight terrorism with the aid of modernized drone technology.[67] In the 1990s, the U.S. DoD gave a contract to AAI Corporation along with Israeli company Malat. The U.S. Navy bought the AAI Pioneer UAV that AAI and Malat developed jointly. Many of these UAVs saw service in the 1991 Gulf War. UAVs demonstrated the possibility of cheaper, more capable fighting-machines, deployable without risk to aircrews. Initial generations primarily involved surveillance aircraft, but some carried armaments, such as the General Atomics MQ-1 Predator, that launched AGM-114 Hellfire air-to-ground missiles.
CAPECON, a European Union project to develop UAVs,[68] ran from 1 May 2002 to 31 December 2005.[69]
As of 2012[update], the United States Air Force (USAF) employed 7,494 UAVs – almost one in three USAF aircraft.[70][71] The Central Intelligence Agency also operated UAVs.[72] By 2013 at least 50 countries used UAVs. China, Iran, Israel, Pakistan, Turkey, and others designed and built their own varieties. The use of drones has continued to increase.[73] Due to their wide proliferation, no comprehensive list of UAV systems exists.[71][74]
The development of smart technologies and improved electrical-power systems led to a parallel increase in the use of drones for consumer and general aviation activities. As of 2021, quadcopter drones exemplify the widespread popularity of hobby radio-controlled aircraft and toys, however the use of UAVs in commercial and general aviation is limited by a lack of autonomy[clarification needed] and by new regulatory environments which require line-of-sight contact with the pilot.[citation needed]
In 2020, a Kargu 2 drone hunted down and attacked a human target in Libya, according to a report from the UN Security Council's Panel of Experts on Libya, published in March 2021. This may have been the first time an autonomous killer-robot armed with lethal weaponry attacked human beings.[75][76]
Superior drone technology, specifically the Bayraktar TB2, played a role in Azerbaijan's successes in the 2020 Nagorno-Karabakh war against Armenia.[77]

UAVs are also used in NASA missions. The Ingenuity helicopter is an autonomous UAV that operated on Mars from 2021 to 2024. Current the Dragonfly spacecraft is being developed, and is aiming to reach and examine Saturn's moon Titan. Its primary goal is to roam around the surface, expanding the amount of area to be researched previously seen by landers. As a UAV, Dragonfly allows examination of potentially diverse types of soil. The drone is set to launch in 2027, and is estimated to take seven more years to reach the Saturnian system.
Miniaturization is also supporting the development of small UAVs which can be used as individual system or in a fleet offering the possibility to survey large areas, in a relatively small amount of time.[78]
According to data from GlobalData, the global military uncrewed aerial systems (UAS) market, which forms a significant part of the UAV industry, is projected to experience a compound annual growth rate of 4.8% over the next decade. This represents a near doubling in market size, from $12.5 billion in 2024 to an estimated $20 billion by 2034.[79]
Design
[edit]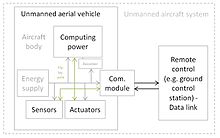
Crewed and uncrewed aircraft of the same type generally have recognizably similar physical components. The main exceptions are the cockpit and environmental control system or life support systems. Some UAVs carry payloads (such as a camera) that weigh considerably less than an adult human, and as a result, can be considerably smaller. Though they carry heavy payloads, weaponized military UAVs are lighter than their crewed counterparts with comparable armaments.
Small civilian UAVs have no life-critical systems, and can thus be built out of lighter but less sturdy materials and shapes, and can use less robustly tested electronic control systems. For small UAVs, the quadcopter design has become popular, though this layout is rarely used for crewed aircraft. Miniaturization means that less-powerful propulsion technologies can be used that are not feasible for crewed aircraft, such as small electric motors and batteries.
Control systems for UAVs are often different from crewed craft. For remote human control, a camera and video link almost always replace the cockpit windows; radio-transmitted digital commands replace physical cockpit controls. Autopilot software is used on both crewed and uncrewed aircraft, with varying feature sets.[80][81][82]
Aircraft configuration
[edit]UAVs can be designed in different configurations than manned aircraft both because there is no need for a cockpit and its windows, and there is no need to optimize for human comfort, although some UAVs are adapted from piloted examples, or are designed for optionally piloted modes. Air safety is also less of a critical requirement for unmanned aircraft, allowing the designer greater freedom to experiment. Instead, UAVs are typically designed around their onboard payloads and their ground equipment. These factors have led to a great variety of airframe and motor configurations in UAVs.
For conventional flight the flying wing and blended wing body offer light weight combined with low drag and stealth, and are popular configurations for many use cases. Larger types which carry a variable payload are more likely to feature a distinct fuselage with a tail for stability, control and trim, although the wing configurations in use vary widely.
For uses that require vertical flight or hovering, the tailless quadcopter requires a relatively simple control system and is common for smaller UAVs. Multirotor designs with 6 or more rotors is more common with larger UAVs, where redundancy is prioritized.[83][84]
Propulsion
[edit]Traditional internal combustion and jet engines remain in use for drones requiring long range. However, for shorter-range missions electric power has almost entirely taken over. The distance record for a UAV (built from balsa wood and mylar skin) across the North Atlantic Ocean is held by a gasoline model airplane or UAV. Manard Hill "in 2003 when one of his creations flew 1,882 miles across the Atlantic Ocean on less than a gallon of fuel" holds this record.[85]
Besides the traditional piston engine, the Wankel rotary engine is used by some drones. This type offers high power output for lower weight, with quieter and more vibration-free running. Claims have also been made for improved reliability and greater range.[citation needed]
Small drones mostly use lithium-polymer batteries (Li-Po), while some larger vehicles have adopted the hydrogen fuel cell. The energy density of modern Li-Po batteries is far less than gasoline or hydrogen. However electric motors are cheaper, lighter and quieter. Complex multi-engine, multi-propeller installations are under development with the goal of improving aerodynamic and propulsive efficiency. For such complex power installations, Battery elimination circuitry (BEC) may be used to centralize power distribution and minimize heating, under the control of a microcontroller unit (MCU).
Ornithopters – wing propulsion
[edit]Flapping-wing ornithopters, imitating birds or insects, have been flown as microUAVs. Their inherent stealth recommends them for spy missions.
Sub-1g microUAVs inspired by flies, albeit using a power tether, have been able to "land" on vertical surfaces.[86] Other projects mimic the flight of beetles and other insects.[87]
Computer control systems
[edit]
UAV computing capability followed the advances of computing technology, beginning with analog controls and evolving into microcontrollers, then system-on-a-chip (SOC) and single-board computers (SBC).
Modern system hardware for UAV control is often called the flight controller (FC), flight controller board (FCB) or autopilot. Common UAV-systems control hardware typically incorporate a primary microprocessor, a secondary or failsafe processor, and sensors such as accelerometers, gyroscopes, magnetometers, and barometers into a single module.
In 2024 EASA agreed on the first certification basis for a UAV flight controller in compliance with the ETSO-C198 for Embention's autopilot. The certification of the UAV flight control systems aims to facilitate the integration of UAVs within the airspace and the operation of drones in critical areas. [88]
Architecture
[edit]Sensors
[edit]Position and movement sensors give information about the aircraft state. Exteroceptive sensors deal with external information like distance measurements, while exproprioceptive ones correlate internal and external states.[89]
Non-cooperative sensors are able to detect targets autonomously so they are used for separation assurance and collision avoidance.[90]
Degrees of freedom (DOF) refers to both the amount and quality of sensors on board: 6 DOF implies 3-axis gyroscopes and accelerometers (a typical inertial measurement unit – IMU), 9 DOF refers to an IMU plus a compass, 10 DOF adds a barometer and 11 DOF usually adds a GPS receiver.[91]
In addition to the navigation sensors, the UAV (or UAS) can be also equipped with monitoring devices such as: RGB, multispectral, hyper-spectral cameras or LiDAR, which may allow providing specific measurements or observations.[92]
Actuators
[edit]UAV actuators include digital electronic speed controllers (which control the RPM of the motors) linked to motors/engines and propellers, servomotors (for planes and helicopters mostly), weapons, payload actuators, LEDs and speakers.
Software
[edit]This section needs to be updated. (February 2022) |
The software running on a UAV is called the autopilot or the flight stack. The purpose of the flight stack is to fly the mission autonomously or with remote-pilot input. An autopilot achieves this by obtaining data from sensors, controlling the motors to make progress along a path, and facilitate communications with ground control and mission planning.[93]
UAVs are real-time systems that require high-frequency to changing sensor data. As a result, UAVs rely on single-board computers for their computational needs. Examples of such single-board computers include Raspberry Pis, Beagleboards, etc. shielded with NavIO, PXFMini, etc. or designed from scratch such as NuttX, preemptive-RT Linux, Xenomai, Orocos-Robot Operating System or DDS-ROS 2.0.
| Layer | Requirement | Operations | Example |
|---|---|---|---|
| Firmware | Time-critical | From machine code to processor execution, memory access | ArduCopter-v1, PX4 |
| Middleware | Time-critical | Flight control, navigation, radio management | PX4, Cleanflight, ArduPilot |
| Operating system | Computer-intensive | Optical flow, obstacle avoidance, SLAM, decision-making | ROS, Nuttx, Linux distributions, Microsoft IOT |
Due to the open-source nature of UAV software, they can be customized to fit specific applications. For example, researchers from the Technical University of Košice have replaced the default control algorithm of the PX4 autopilot.[94] This flexibility and collaborative effort has led to a large number of different open-source stacks, some of which are forked from others, such as CleanFlight, which is forked from BaseFlight and from which three other stacks are forked.
Loop principles
[edit]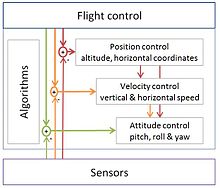
UAVs employ open-loop, closed-loop or hybrid control architectures.
- Open loop – This type provides a positive control signal (faster, slower, left, right, up, down) without incorporating feedback from sensor data.
- Closed loop – This type incorporates sensor feedback to adjust behavior (reduce speed to reflect tailwind, move to altitude 300 feet). The PID controller is common. Sometimes, feedforward is employed, transferring the need to close the loop further.[95]
Communications
[edit]UAVs use a radio for control and exchange of video and other data. Early UAVs had only narrowband uplink. Downlinks came later. These bi-directional narrowband radio links carried command and control (C&C) and telemetry data about the status of aircraft systems to the remote operator.
In most modern UAV applications, video transmission is required. So instead of having separate links for C&C, telemetry and video traffic, a broadband link is used to carry all types of data. These broadband links can leverage quality of service techniques and carry TCP/IP traffic that can be routed over the Internet.
The radio signal from the operator side can be issued from either:
- Ground control – a human operating a radio transmitter/receiver, a smartphone, a tablet, a computer, or the original meaning of a military ground control station (GCS).
- Remote network system, such as satellite duplex data links for some military powers. Downstream digital video over mobile networks has also entered consumer markets, while direct UAV control uplink over the cellular mesh and LTE have been demonstrated and are in trials.[96]
- Another aircraft, serving as a relay or mobile control station – military manned-unmanned teaming (MUM-T).[97]
Modern networking standards have explicitly considered drones and therefore include optimizations. The 5G standard has mandated reduced user plane latency to 1ms while using ultra-reliable and low-latency communications.[98]
UAV-to-UAV coordination supported by Remote ID communication technology. Remote ID messages (containing the UAV coordinates) are broadcast and can be used for collision-free navigation.[99]
Autonomy
[edit]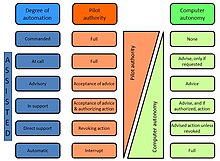
The level of autonomy in UAVs varies widely. UAV manufacturers often build in specific autonomous operations, such as:[100]
- Self-level: attitude stabilization on the pitch and roll axes.
- Altitude hold: The aircraft maintains its altitude using barometric pressure and/or GPS data.
- Hover/position hold: Keep level pitch and roll, stable yaw heading and altitude while maintaining position using GNSS or inertial sensors.
- Headless mode: Pitch control relative to the position of the pilot rather than relative to the vehicle's axes.
- Care-free: automatic roll and yaw control while moving horizontally
- Take-off and landing (using a variety of aircraft or ground-based sensors and systems; see also "autoland")
- Failsafe: automatic landing or return-to-home upon loss of control signal
- Return-to-home: Fly back to the point of takeoff (often gaining altitude first to avoid possible intervening obstructions such as trees or buildings).
- Follow-me: Maintain relative position to a moving pilot or other object using GNSS, image recognition or homing beacon.
- GPS waypoint navigation: Using GNSS to navigate to an intermediate location on a travel path.
- Orbit around an object: Similar to Follow-me but continuously circle a target.
- Pre-programmed aerobatics (such as rolls and loops)
- Pre-programmed delivery ( delivery drones)
One approach to quantifying autonomous capabilities is based on OODA terminology, as suggested by a 2002 US Air Force Research Laboratory report, and used in the table on the right.[101]

Full autonomy is available for specific tasks, such as airborne refueling[102] or ground-based battery switching.
Other functions available or under development include; collective flight, real-time collision avoidance, wall following, corridor centring, simultaneous localization and mapping and swarming, cognitive radio and machine learning. In this context, computer vision can play an important role for automatically ensuring flight safety.
Performance considerations
[edit]Flight envelope
[edit]UAVs can be programmed to perform aggressive maneuvers or landing/perching on inclined surfaces,[103] and then to climb toward better communication spots.[104] Some UAVs can control flight with varying flight modelisation,[105][106] such as VTOL designs.
UAVs can also implement perching on a flat vertical surface.[107]
Endurance
[edit]
UAV endurance is not constrained by the physiological capabilities of a human pilot.
Because of their small size, low weight, low vibration and high power to weight ratio, Wankel rotary engines are used in many large UAVs. Their engine rotors cannot seize; the engine is not susceptible to shock-cooling during descent and it does not require an enriched fuel mixture for cooling at high power. These attributes reduce fuel usage, increasing range or payload.
Proper drone cooling is essential for long-term drone endurance. Overheating and subsequent engine failure is the most common cause of drone failure.[108]
Hydrogen fuel cells, using hydrogen power, may be able to extend the endurance of small UAVs, up to several hours.[109][110]
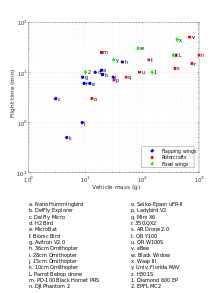
Micro air vehicles endurance is so far best achieved with flapping-wing UAVs, followed by planes and multirotors standing last, due to lower Reynolds number.[89]
Solar-electric UAVs, a concept originally championed by the AstroFlight Sunrise in 1974, have achieved flight times of several weeks.
Solar-powered atmospheric satellites ("atmosats") designed for operating at altitudes exceeding 20 km (12 miles, or 60,000 feet) for as long as five years could potentially perform duties more economically and with more versatility than low Earth orbit satellites. Likely applications include weather drones for weather monitoring, disaster recovery, Earth imaging and communications.
Electric UAVs powered by microwave power transmission or laser power beaming are other potential endurance solutions.[111]
Another application for a high endurance UAV would be to "stare" at a battlefield for a long interval (ARGUS-IS, Gorgon Stare, Integrated Sensor Is Structure) to record events that could then be played backwards to track battlefield activities.
| UAV | Flight time hours:minutes |
Date | Notes |
|---|---|---|---|
| Boeing Condor | 58:11 | 1989 | The aircraft is currently in the Hiller Aviation Museum. |
| General Atomics Gnat | 40:00 | 1992 | [113][114] |
| TAM-5 | 38:52 | 11 August 2003 | Smallest UAV to cross the Atlantic |
| QinetiQ Zephyr Solar Electric | 54:00 | September 2007 | [116][117] |
| RQ-4 Global Hawk | 33:06 | 22 March 2008 | Set an endurance record for a full-scale, operational uncrewed aircraft.[118] |
| QinetiQ Zephyr Solar Electric | 82:37 | 28–31 July 2008 | [119] |
| QinetiQ Zephyr 7 | 336:22 | 9–23 July 2010 | Solar electric powered. Remained aloft for 14 days. Also filed for FAI altitude record of 70,740 ft (21,561 m)[120] |
The delicacy of the British PHASA-35 military drone (at a late stage of development) is such that traversing the first turbulent twelve miles of atmosphere is a hazardous endeavor. It has, however, remained on station at 65,000 feet for 24 hours. Airbus' Zephyr in 2023 has attained 70,000 feet and flown for 64 days; 200 days aimed at. This is sufficiently close enough to near-space for them to be regarded in "pseudo-satellites" as regards to their operational capabilities.[121]
Reliability
[edit]Reliability improvements target all aspects of UAV systems, using resilience engineering and fault tolerance techniques.
Individual reliability covers robustness of flight controllers, to ensure safety without excessive redundancy to minimize cost and weight.[122] Besides, dynamic assessment of flight envelope allows damage-resilient UAVs, using non-linear analysis with ad hoc designed loops or neural networks.[123] UAV software liability is bending toward the design and certifications of crewed avionics software.[124]
Swarm resilience involves maintaining operational capabilities and reconfiguring tasks given unit failures.[125]
Applications
[edit]In recent years, autonomous drones have begun to transform various application areas as they can fly beyond visual line of sight (BVLOS)[126] while maximizing production, reducing costs and risks, ensuring site safety, security and regulatory compliance,[127] and protecting the human workforce in times of a pandemic.[128] They can also be used for consumer-related missions like package delivery, as demonstrated by Amazon Prime Air, and critical deliveries of health supplies.
There are numerous civilian, commercial, military, and aerospace applications for UAVs.[2] These include:
- General
- Recreation, Disaster relief, archeology, conservation of biodiversity and habitat,[129] law enforcement, crime, and terrorism.
- Commercial
- Aerial surveillance, filmmaking,[130] journalism, scientific research, surveying, cargo transport, mining, manufacturing, Forestry, solar farming, thermal energy, ports and agriculture.
Warfare
[edit]
As of 2020, seventeen countries have armed UAVs, and more than 100 countries use UAVs in a military capacity.[131] The first five countries producing domestic UAV designs are the United States, China, Israel, Iran and Turkey.[132][133][134][135] Top military UAV manufactures are including General Atomics, Lockheed Martin, Northrop Grumman, Boeing, Baykar,[136][133] TAI, IAIO, CASC and CAIG.[135] China has established and expanded its presence in military UAV market[135] since 2010. In the early 2020s, Turkey also established and expanded its presence in the military UAV market.[132][135][133][136]
In the early 2010s, Israeli companies mainly focus on small surveillance UAV systems, and by the number of drones, Israel exported 60.7% (2014) of UAVs on the market while the United States exported 23.9% (2014).[137] Between 2010 and 2014, there were 439 drones exchanged compared to 322 in the five years previous to that, among these only small fraction of overall trade – just 11 (2.5%) of the 439 are armed drones.[137] The US alone operated over 9,000 military UAVs in 2014; among them more than 7000 are RQ-11 Raven miniature UAVs.[138] Since 2010, Chinese drone companies have begun to export large quantities of drones to the global military market. Of the 18 countries that are known to have received military drones between 2010 and 2019, the top 12 all purchased their drones from China.[135][139] The shift accelerated in the 2020s due to China's advancement in drone technologies and manufacturing, compounded by market demand from the Russian invasion of Ukraine and the Israel-Gaza conflict.[140][141][142][143]
For intelligence and reconnaissance missions, the inherent stealth of micro UAV flapping-wing ornithopters, imitating birds or insects, offers potential for covert surveillance and makes them difficult targets to bring down.
Unmanned surveillance and reconnaissance aerial vehicle are used for reconnaissance, attack, demining, and target practice.
Following the 2022 Russian invasion of Ukraine a dramatic increase in UAV development took place with Ukraine creating the Brave1 platform to promote rapid development of innovative systems.
Civil
[edit]Suppliers
[edit]
The civilian (commercial and general) drone market is dominated by Chinese companies. Chinese manufacturer DJI alone had 74% of the civil market share in 2018, with no other company accounting for more than 5%.[144] The companies continue to hold over 70% of global market share by 2023, despite under increasing scrutinies and sanctions from the United States.[145] The US Interior Department grounded its fleet of DJI drones in 2020, while the Justice Department prohibited the use of federal funds for the purchase of DJI and other foreign-made UAVs.[146][147] DJI is followed by American company 3D Robotics, Chinese company Yuneec, Autel Robotics, and French company Parrot.[148][149]
As of May 2021, 873,576 UAVs had been registered with the US FAA, of which 42% were categorized as commercial and 58% as recreational.[150] 2018 NPD point to consumers increasingly purchasing drones with more advanced features with 33 percent growth in both the $500+ and $1000+ market segments.[151]
Рынок гражданских БПЛА относительно новый по сравнению с военным. Компании появляются как в развитых, так и в развивающихся странах одновременно. Многие стартапы на ранних стадиях получили поддержку и финансирование от инвесторов, как в США, и от государственных учреждений, как в Индии. [152] Some universities offer research and training programs or degrees.[153] Private entities also provide online and in-person training programs for both recreational and commercial UAV use.[154]
Потребительские дроны широко используются полицией и военными организациями по всему миру из-за экономичности потребительских товаров. С 2018 года израильские военные используют БПЛА DJI для выполнения легких разведывательных задач. [ 155 ] [ 156 ] [ 141 ] Дроны DJI используются китайской полицией в Синьцзяне с 2017 года. [ 157 ] [ 158 ] и американские полицейские управления по всей стране с 2018 года. [ 159 ] [ 160 ] И Украина, и Россия широко использовали коммерческие дроны DJI во время российского вторжения в Украину . [ 161 ] Эти гражданские дроны DJI были предоставлены правительствами, любителями, международными пожертвованиями Украине и России для поддержки каждой стороны на поле боя, и часто ими управляли любители дронов, завербованные в вооруженные силы. Распространенность дронов DJI объясняется их доминированием на рынке, доступностью, высокой производительностью и надежностью. [ 162 ]
Развлечение
[ редактировать ]Дроны также используются в ночных демонстрациях в художественных и рекламных целях, их основные преимущества заключаются в том, что они безопаснее, тише и лучше для окружающей среды, чем фейерверки. Они могут заменить или стать дополнением фейерверков, чтобы снизить финансовую нагрузку фестивалей. Кроме того, они могут дополнять фейерверки благодаря способности дронов нести их, создавая при этом новые формы произведений искусства. [ 163 ] [ 164 ] [ 165 ]
Дроны также можно использовать для гонок, как с функцией VR, так и без нее.
Аэрофотосъемка
[ редактировать ]Дроны идеально подходят для съемки с воздуха в фотографии и кинематографии и широко используются для этой цели. [ 130 ] Небольшие дроны избавляют от необходимости точной координации между пилотом и оператором: обе роли берет на себя один и тот же человек. Однако в больших дронах с профессиональными кинокамерами обычно есть пилот дрона и оператор, который управляет углом обзора и объективом камеры. Например, кинодроном AERIGON, который используется при производстве крупных блокбастеров, управляют 2 человека. [ 166 ] Дроны обеспечивают доступ к опасным, удаленным или недоступным иным образом объектам.
Экологический мониторинг
[ редактировать ]БПЛА или БПЛА предлагают большое преимущество для мониторинга окружающей среды, позволяя проводить исследования нового поколения с очень высоким или сверхвысоким разрешением как в пространстве, так и во времени. Это дает возможность преодолеть существующий разрыв между спутниковыми данными и полевым мониторингом. Это стимулировало огромное количество мероприятий по улучшению описания природных и сельскохозяйственных экосистем. Наиболее распространенными приложениями являются:
- Топографические съемки [ 167 ] для изготовления ортофотопланов, цифровых моделей поверхности и 3D-моделей;
- Мониторинг природных экосистем для мониторинга биоразнообразия, [ 168 ] картирование среды обитания, [ 169 ] обнаружение инвазивных чужеродных видов [ 170 ] и изучение деградации экосистем из-за инвазивных видов или нарушений;
- Точное земледелие [ 171 ] который использует все доступные технологии, включая БПЛА, чтобы производить больше с меньшими затратами (например, оптимизация удобрений, пестицидов, ирригации);
- Для мониторинга реки было разработано несколько методов мониторинга стока с использованием методов визуальной скоростной метрики, которые позволяют правильно описывать двумерные поля скорости потока. [ 172 ]
- Структурная целостность любого типа сооружения, будь то плотина, железная дорога или другие опасные, недоступные или массивные объекты для мониторинга зданий. [ 173 ]
Эти действия могут быть дополнены различными измерениями, такими как фотограмметрия , термография, мультиспектральные изображения, трехмерное полевое сканирование и карты нормализованных разностных индексов растительности .
Исследования в области сельского хозяйства, лесного хозяйства и окружающей среды
[ редактировать ]Поскольку глобальный спрос на производство продуктов питания растет в геометрической прогрессии, ресурсы истощаются, сельскохозяйственные угодья сокращаются, а сельскохозяйственная рабочая сила становится все более дефицитной, существует острая потребность в более удобных и разумных сельскохозяйственных решениях, чем традиционные методы, и индустрия сельскохозяйственных дронов и робототехники становится все более востребованной. ожидается прогресс. [ 174 ] Сельскохозяйственные дроны используются для создания устойчивого сельского хозяйства во всем мире, что ведет к сельскому хозяйству нового поколения. [ 175 ] В этом контексте наблюдается распространение инноваций как в инструментах, так и в методологиях, которые позволяют точно описать состояние растительности, а также могут помочь точно распределить питательные вещества, пестициды или семена по полю. [ 5 ]
Также исследуется использование БПЛА для обнаружения и борьбы с лесными пожарами, будь то путем наблюдения или запуска пиротехнических устройств для возникновения ответных вспышек . [ 176 ]
БПЛА также сейчас широко используются для наблюдения за дикой природой, например, за гнездованием морских птиц, тюленей и даже нор вомбатов. [ 177 ]
Правоохранительные органы
[ редактировать ]Полиция может использовать дроны для таких задач, как поисково-спасательные операции и мониторинг дорожного движения . [ 178 ]
Гуманитарная помощь
[ редактировать ]Дроны все чаще находят свое применение в гуманитарной помощи и ликвидации последствий стихийных бедствий, где они используются для широкого спектра задач, таких как доставка продуктов питания, лекарств и предметов первой необходимости в отдаленные районы или картографирование изображений до и после стихийных бедствий. [ 179 ]
Безопасность и безопасность
[ редактировать ]
Угрозы
[ редактировать ]Неприятность
[ редактировать ]БПЛА могут угрожать безопасности воздушного пространства множеством способов, включая непреднамеренные столкновения или другие помехи другим воздушным судам, преднамеренные атаки или отвлечение пилотов или диспетчеров полета. Первый случай столкновения дрона и самолета произошел в середине октября 2017 года в Квебеке, Канада. [ 180 ] Первый зарегистрированный случай столкновения дрона с воздушным шаром произошел 10 августа 2018 года в Дриггсе, штат Айдахо , США; хотя воздушному шару не было нанесено никаких существенных повреждений, а также не было каких-либо травм среди троих его пассажиров, пилот воздушного шара сообщил об инциденте в Национальный совет по безопасности на транспорте , заявив: «Я надеюсь, что этот инцидент поможет начать разговор об уважении к природе, воздушному пространству и правила и положения». [ 181 ] Несанкционированные полеты БПЛА в крупные аэропорты или вблизи них привели к длительному прекращению коммерческих рейсов. [ 182 ]
Дроны вызвали серьезные нарушения в работе аэропорта Гатвик в декабре 2018 года , что потребовало развертывания британской армии. [ 183 ] [ 184 ]
В Соединенных Штатах пролет рядом с лесным пожаром карается штрафом на сумму до 25 000 долларов. Тем не менее, в 2014 и 2015 годах авиационная поддержка пожаротушения в Калифорнии несколько раз была затруднена, в том числе на озере Файр. [ 185 ] и Северный огонь . [ 186 ] [ 187 ] В ответ законодатели Калифорнии представили законопроект, который позволит пожарным отключать БПЛА, вторгающиеся в ограниченное воздушное пространство. [ 188 ] Позже ФАУ потребовало регистрации большинства БПЛА.
Уязвимости безопасности
[ редактировать ]К 2017 году дроны стали использовать для сбрасывания контрабанды в тюрьмы. [ 189 ]
Интерес к кибербезопасности БПЛА значительно возрос после инцидента с захватом видеопотока БПЛА Predator в 2009 году. [ 190 ] где исламские боевики использовали дешевое, готовое оборудование для потоковой передачи видео с БПЛА. Еще одним риском является возможность угона или глушения БПЛА в полете. Несколько исследователей безопасности обнародовали некоторые уязвимости коммерческих БПЛА, а в некоторых случаях даже предоставили полный исходный код или инструменты для воспроизведения их атак. [ 191 ] На семинаре по БПЛА и конфиденциальности в октябре 2016 года исследователи Федеральной торговой комиссии показали, что им удалось взломать три различных потребительских квадрокоптера , и отметили, что производители БПЛА могут повысить безопасность своих БПЛА с помощью базовых мер безопасности, таких как шифрование Wi-Fi. сигнал и добавление защиты паролем. [ 192 ]
Агрессия
[ редактировать ]БПЛА могли быть загружены опасной полезной нагрузкой и врезаться в уязвимые цели. Полезная нагрузка может включать взрывчатые вещества, химические, радиологические или биологические опасные вещества. БПЛА с, как правило, несмертельной полезной нагрузкой могут быть взломаны и использованы в злонамеренных целях. Для противодействия этой угрозе государствами разрабатываются системы борьбы с БПЛА. Однако это оказывается трудным делом. Как заявил Дж. Роджерс в интервью A&T: «В настоящий момент ведутся большие дебаты о том, как лучше всего противостоять этим небольшим БПЛА, используются ли они любителями, вызывая небольшие неудобства, или в более зловещих целях». манерой террористического актора». [ 193 ]
Контрмеры
[ редактировать ]Противодействующая беспилотная авиационная система
[ редактировать ]

Злонамеренное использование БПЛА привело к разработке технологий противодействия беспилотным авиационным системам (БПЛА). Автоматическое отслеживание и обнаружение БПЛА с помощью коммерческих камер стало точным благодаря разработке алгоритмов машинного обучения на основе глубокого обучения. [ 194 ] Также возможно автоматически идентифицировать БПЛА по разным камерам с разными точками обзора и характеристиками оборудования с помощью методов повторной идентификации. [ 195 ] Коммерческие системы, такие как Aaronia AARTOS, были установлены в крупных международных аэропортах. [ 196 ] [ 197 ] Как только БПЛА обнаружен, ему можно противостоять с помощью кинетической силы (ракеты, снаряды или другой БПЛА) или некинетической силы (лазер, микроволны, помехи связи). [ 198 ] Зенитно-ракетные системы, такие как « Железный купол», также совершенствуются с использованием технологий C-UAS. Также предлагается использовать группу интеллектуальных БПЛА для противодействия одному или нескольким враждебным БПЛА. [ 199 ]
Регулирование
[ редактировать ]Регулирующие органы по всему миру разрабатывают решения по управлению движением беспилотных авиационных систем для лучшей интеграции БПЛА в воздушное пространство. [ 200 ]
Использование беспилотных летательных аппаратов все больше регулируется властями гражданской авиации отдельных стран. Режимы регулирования могут существенно различаться в зависимости от размера и использования дронов. Международная организация гражданской авиации (ИКАО) начала изучать использование дронов еще в 2005 году, в результате чего в 2011 году был подготовлен отчет. [ 201 ] Франция была одной из первых стран, разработавших национальную структуру на основе этого отчета, и более крупные авиационные организации, такие как ФАУ и EASA, быстро последовали этому примеру. [ 202 ] В 2021 году ФАУ опубликовало правило, требующее, чтобы все коммерчески используемые БПЛА и все БПЛА, независимо от намерения, весом 250 г и более, участвовали в Remote ID , что делает местоположение дронов, местонахождение диспетчеров и другую информацию общедоступной от взлета до выключения; с тех пор это правило было оспорено в находящемся на рассмотрении федеральном иске RaceDayQuads против FAA . [ 203 ] [ 204 ]
Сертификация дронов ЕС — идентификационная этикетка класса
[ редактировать ]Внедрение знака идентификации класса служит важной цели в регулировании и эксплуатации дронов. [ 205 ] Этикетка представляет собой механизм проверки, предназначенный для подтверждения того, что дроны определенного класса соответствуют строгим стандартам, установленным администрациями для проектирования и производства. [ 206 ] Эти стандарты необходимы для обеспечения безопасности и надежности дронов в различных отраслях и сферах применения.
Предоставляя клиентам такую гарантию, знак идентификации класса помогает повысить доверие к технологии дронов и способствует более широкому ее внедрению в различных отраслях. Это, в свою очередь, способствует росту и развитию индустрии дронов и поддерживает интеграцию дронов в общество.
Экспортный контроль
[ редактировать ]Экспорт БПЛА или технологий, способных нести полезную нагрузку массой 500 кг на расстояние не менее 300 км, во многих странах ограничен Режимом контроля за ракетными технологиями .
См. также
[ редактировать ]- Список беспилотных летательных аппаратов
- Доставка дрон
- Дрон в коробке
- Планирующая бомба
- Международный конкурс воздушной робототехники
- Список фильмов с участием дронов
- Список военной электроники США
- МАРС-перехватчик
- Микромеханическое летающее насекомое
- Парк Аберпорт
- Квадрокоптер
- Радиоуправляемый самолет
- Автономный самолет
- Опционально пилотируемый автомобиль
- Система точной доставки полезной нагрузки Sypaq Corvo
- Проект «Спутниковый страж»
- Тактическая система управления
- Наземная станция управления БПЛА
- Беспилотный подводный аппарат
Ссылки
[ редактировать ]Цитаты
[ редактировать ]- ^ Тайс, Брайан П. (весна 1991 г.). «Беспилотные летательные аппараты – мультипликатор силы 1990-х годов» . Журнал «Воздушная мощь» . Архивировано из оригинала 24 июля 2009 года . Проверено 6 июня 2013 г.
При использовании БПЛА обычно должны выполнять задачи, характеризующиеся тремя D: скучные, грязные и опасные.
- ^ Перейти обратно: а б Альварадо, Эд (3 мая 2021 г.). «237 способов применения дронов революционизируют бизнес» . Обзор индустрии дронов . Архивировано из оригинала 11 мая 2021 года . Проверено 11 мая 2021 г.
- ^ Ф. Рекаби-Бана; Ху, Дж.; Т. Крайник; Арвин, Ф., « Унифицированное надежное планирование траектории и создание оптимальной траектории для эффективного трехмерного покрытия территории квадрокоптерных БПЛА ». Транзакции IEEE в интеллектуальных транспортных системах, 2023 г.
- ^ Перейти обратно: а б Ху, Дж.; Ню, Х.; Карраско, Дж.; Леннокс, Б.; Арвин Ф. « Отказоустойчивая совместная навигация сетевых роев БПЛА для мониторинга лесных пожаров » Аэрокосмическая наука и технологии, 2022.
- ^ Перейти обратно: а б Дистанционное зондирование окружающей среды с помощью беспилотных авиационных систем (БПЛА) . [Sl]: ELSEVIER – НАУКА ЗДОРОВЬЯ. 2023. ISBN 978-0-323-85283-8 . OCLC 1329422815 . Архивировано из оригинала 27 февраля 2023 года . Проверено 11 января 2023 г.
- ^ Перкс, Мэтью Т.; Даль Сассо, Сильвано Фортунато; Хауэ, Александр; Джеймисон, Элизабет; Ле Коз, Жером; Пирс, Софи; Пенья-Аро, Сальвадор; Писарро, Алонсо; Стрельникова Дарья; Тауро, Флавия; Бомхоф, Джеймс; Гримальди, Сальваторе; Гуле, Ален; Хортобадьи, Борбала; Жодо, Магали (8 июля 2020 г.). «На пути к гармонизации методов измерения скорости изображения для наблюдения за скоростью поверхности реки» . Данные науки о системе Земли . 12 (3): 1545–1559. Бибкод : 2020ESSD...12.1545P . doi : 10.5194/essd-12-1545-2020 . ISSN 1866-3516 . Архивировано из оригинала 12 января 2023 года . Проверено 12 января 2023 г.
- ^ Копаран, Ченгиз; Коч, А. Бюлент; Приветт, Чарльз В.; Сойер, Кэлвин Б. (март 2020 г.). «Адаптивное устройство отбора проб воды для воздушных роботов» . Дроны . 4 (1): 5. дои : 10.3390/drones4010005 .
- ^ Копаран, Ченгиз; Коч, Али Бюлент; Приветт, Чарльз В.; Сойер, Кэлвин Б.; Шарп, Джулия Л. (май 2018 г.). «Оценка автономного отбора проб воды с помощью БПЛА» . Вода . 10 (5): 655. дои : 10.3390/w10050655 .
- ^ Копаран, Ченгиз; Коч, Али Бюлент; Приветт, Чарльз В.; Сойер, Кэлвин Б. (март 2018 г.). «Измерения качества воды на месте с использованием системы беспилотных летательных аппаратов (БПЛА)» . Вода . 10 (3): 264. дои : 10.3390/w10030264 .
- ^ Копаран, Ченгиз; Коч, Али Бюлент; Приветт, Чарльз В.; Сойер, Кэлвин Б. (март 2019 г.). «Автономные измерения показателей качества незагрязненной воды на месте и сбор проб с помощью БПЛА» . Вода . 11 (3): 604. дои : 10.3390/w11030604 .
- ^ «Дроны доставляют заключенным по всему миру порно и наркотики» . Фокс Ньюс . 17 апреля 2017 года. Архивировано из оригинала 31 августа 2018 года . Проверено 17 апреля 2017 г.
- ^ Примечание; Термин « трутень » относится к самцу пчелы, который служит только для оплодотворения пчелиной матки , отсюда и использование этого названия по отношению к воздушной мишени DH Queen Bee.
- ^ «Дроны и искусственный интеллект» . Обзор индустрии дронов . 28 августа 2018 г. Архивировано из оригинала 17 сентября 2020 г. . Проверено 11 апреля 2020 г.
- ^ «В чем разница между дроном и радиоуправляемым самолетом или вертолетом?» . Drones Etc. Архивировано из оригинала 17 ноября 2015 года . Проверено 12 октября 2015 г.
- ^ «беспилотный летательный аппарат» . TheFreeDictionary.com . Архивировано из оригинала 8 января 2015 года . Проверено 8 января 2015 г.
- ^ Гилмартен, Джон Ф. «Беспилотный летательный аппарат» . Британская энциклопедия . Архивировано из оригинала 29 марта 2020 года . Проверено 24 марта 2020 г.
- ^ «Дорожная карта беспилотных авиационных систем» (PDF) . Архивировано из оригинала (PDF) 2 октября 2008 года.
- ^ «Европейский генеральный план ОрВД на 2015 год | SESAR» . www.sesarju.eu . Архивировано из оригинала 6 февраля 2016 года . Проверено 3 февраля 2016 г.
- ^ «Правительство штата готовится к созданию автономного картографирования RPAS» . 23 января 2017 года. Архивировано из оригинала 25 февраля 2017 года . Проверено 1 февраля 2017 г.
- ^ «Канадские авиационные правила» . Правительство Канады – Веб-сайт законов о правосудии . 1 июня 2019 года. Архивировано из оригинала 6 января 2022 года . Проверено 16 января 2019 г.
- ^ Перейти обратно: а б с д «Классификация БПЛА» . Архивировано из оригинала 23 мая 2022 года . Проверено 10 июня 2022 г.
- ^ «Глаза армии: дорожная карта армии США по БПЛА на 2010–2035 годы» (PDF) . Архивировано (PDF) из оригинала 18 февраля 2022 года . Проверено 10 июня 2022 г.
- ^ «Нано, микро, маленький: различные типы дронов в Индии и можно ли предотвратить удар, подобный Джамму». Архивировано 29 июня 2021 г. в Wayback Machine , ThePrint , 29 июня 2021 г.
- ^ Дроны, Percepto (3 января 2019 г.). «Различия между БПЛА, БПЛА и автономными дронами» . Перцепто . Архивировано из оригинала 18 февраля 2020 года . Проверено 18 февраля 2020 г. .
- ^ Кэри, Лесли; Койн, Джеймс. «Беспилотные авиационные системы (БПЛА) ИКАО, циркуляр 328». Ежегодник БПЛА за 2011–2012 гг. – БПЛА: глобальная перспектива (PDF) . Блиенберг и Ко, стр. 112–115. Архивировано из оригинала (PDF) 4 марта 2016 года . Проверено 26 февраля 2022 г.
- ^ Ху, Дж.; Ланзон, А. (2018). «Инновационный трехроторный дрон и связанный с ним распределенный контроль роя воздушных дронов» . Робототехника и автономные системы . 103 : 162–174. дои : 10.1016/j.robot.2018.02.019 .
- ^ Гарроу, Лори А.; Герман, Брайан Дж.; Леонард, Кэролайн Э. (1 ноября 2021 г.). «Городская воздушная мобильность: всесторонний обзор и сравнительный анализ автономного и электрического наземного транспорта для обоснования будущих исследований» . Транспортные исследования, часть C: Новые технологии . 132 : 103377. doi : 10.1016/j.trc.2021.103377 . ISSN 0968-090X .
- ^ «Изучение дронов с газовым двигателем: использование и преимущества» . www.flyability.com . Проверено 8 августа 2024 г.
- ^ Чжан, Цайчжи; Цю, Юци; Чен, Цзявэй; Ли, Юэхуа; Лю, Чжитао; Лю, Ян; Чжан, Цзюцзюнь; Хва, Чан Сью (1 августа 2022 г.). «Всесторонний обзор электрохимических гибридных систем электропитания и интеллектуального управления энергией для беспилотных летательных аппаратов в сфере государственных услуг» . Энергетика и ИИ . 9 : 100175. дои : 10.1016/j.egyai.2022.100175 . ISSN 2666-5468 .
- ^ jenks2026 (30 января 2024 г.). «Дроны и БПЛА на солнечных батареях» . Грин.орг . Проверено 8 августа 2024 г.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Легендарное исследование неба (2024). «Революция в возможностях БПЛА: исследование потенциала ядерных двигательных установок» . Технологии БПЛА : 219399 байт. doi : 10.6084/M9.FIGSHARE.26198462.V1 .
- ^ «Решения для питания вашего дрона в 2024 году: новые виды топлива» . www.commercialuavnews.com . Проверено 8 августа 2024 г.
- ^ Энциклопедия арабо-израильского конфликта: политическая, социальная и военная история: политическая, социальная и военная история , ABC-CLIO, 12 мая 2008 г., Спенсер К. Такер, Присцилла Мэри Робертс, страницы 1054–55 ISBN
- ↑ Будущее использования дронов: возможности и угрозы с этической и юридической точек зрения. Архивировано 27 февраля 2023 г. в Wayback Machine , Asser Press – Springer, глава Алана Маккенны, стр. 355.
- ^ Каплан, Филип (2013). Морская авиация во Второй мировой войне . Перо и меч. п. 19. ISBN 978-1-4738-2997-8 . Архивировано из оригинала 27 февраля 2023 года . Проверено 19 августа 2019 г.
- ^ Халлион, Ричард П. (2003). Бегство: изобретение воздушной эпохи, от античности до Первой мировой войны . Издательство Оксфордского университета. п. 66 . ISBN 978-0-19-028959-1 .
- ^ Морская авиация в Первой мировой войне: ее воздействие и влияние , Р.Д. Непрофессионал, стр. 56
- ^ Реннер, Стивен Л. (2016). Сломанные крылья: Венгерские ВВС, 1918–45 . Издательство Университета Индианы. п. 2. ISBN 978-0-253-02339-1 . Архивировано из оригинала 27 февраля 2023 года . Проверено 26 октября 2019 г.
- ^ Мерфи, Джастин Д. (2005). Военные самолеты, происхождение до 1918 года: иллюстрированная история их воздействия . АВС-КЛИО. стр. 9–10. ISBN 978-1-85109-488-2 . Архивировано из оригинала 27 февраля 2023 года . Проверено 19 августа 2019 г.
- ^ Хейдон, Ф. Стэнсбери (2000). Военные воздухоплавания в начале гражданской войны . Джу Пресс. стр. 18–20 . ISBN 978-0-8018-6442-1 .
- ^ Микеш, Роберт С. (1973). «Атака Японии воздушными шарами во время Второй мировой войны на Северную Америку» (PDF) . Смитсоновские Анналы полета (9). Вашингтон, округ Колумбия: 1–85. doi : 10.5479/si.AnnalsFlight.9 . hdl : 10088/18679 . ISSN 0081-0207 . Архивировано (PDF) из оригинала 6 декабря 2017 года . Проверено 12 июля 2018 г.
- ^ Тапан К. Саркар , История беспроводной связи , Джон Уайли и сыновья, 2006, ISBN 0-471-71814-9 , с. 97.
- ↑ Рэнди Альфред, « 7 ноября 1905 г.: Дистанционное управление удивляет общественность », Wired , 7 ноября 2011 г.
- ^ HR Эверетт (2015). Беспилотные системы Первой и Второй мировых войн . МТИ Пресс . стр. 91–95. ISBN 978-0-262-02922-3 .
- ^ Перейти обратно: а б с Тейлор, Джон В.Р. Карманный справочник Джейн по дистанционно пилотируемым транспортным средствам .
- ^ Профессор А.М. Низкий полет, 3 октября 1952 г., стр. 436 "Первая управляемая ракета"
- ^ Демпси, Мартин Э. (9 апреля 2010 г.). «Глаза армии — дорожная карта армии США по беспилотным авиационным системам на 2010–2035 годы» (PDF) . Армия США . Архивировано из оригинала (PDF) 22 сентября 2018 года . Проверено 6 марта 2011 г.
- ^ Говорит Роберт Каньике (21 мая 2012 г.). «История дронов США» . Архивировано из оригинала 26 сентября 2019 года . Проверено 17 февраля 2014 г.
- ^ Андерссон, Леннарт (1994). Советские самолеты и авиация, 1917–1941 гг . Серия «Патнэм Авиация». Аннаполис, Мэриленд: Издательство Военно-морского института. п. 249. ИСБН 9781557507709 . Архивировано из оригинала 27 февраля 2023 года . Проверено 18 декабря 2021 г.
Эксперименты с беспилотной версией ТБ-1, управляемой по радио от других самолетов, начались в 1935 году и продолжались до 1939 года.
- ^ HR Эверетт (2015). Беспилотные системы Первой и Второй мировых войн . МТИ Пресс . п. 318 . ISBN 9780262029223 .
- ^ Вагнер 1982 , с. xi.
- ^ Вагнер 1982 , с. xi, xi.
- ^ Вагнер 1982 , с. xii.
- ^ Вагнер 1982 , с. 79.
- ^ Вагнер 1982 , с. 78, 79.
- ^ Данстан, Саймон (2013). Израильские укрепления Октябрьской войны 1973 года . Издательство Оспри. п. 16. ISBN 9781782004318 . Проверено 25 октября 2015 г.
Война на истощение также была примечательна первым использованием БПЛА или беспилотных летательных аппаратов с разведывательными камерами в бою.
[ постоянная мертвая ссылка ] - ^ Саксена, ВК (2013). Удивительный рост и развитие возможностей БПЛА и противоракетной обороны: куда ведут технологии? . Vij Books India Pvt Ltd. с. 6. ISBN 9789382573807 . Архивировано из оригинала 27 февраля 2023 года . Проверено 25 октября 2015 г.
Во время войны Судного дня израильтяне использовали ДПЛА Teledyne Ryan 124 R вместе с отечественными БПЛА Scout и Mastiff для разведки, наблюдения и в качестве приманок для отвлечения огня от арабских ЗРК. Это привело к тому, что арабские силы начали тратить дорогостоящие и дефицитные ракеты на неподходящие цели [...].
- ^ Блюм, Ховард (2003). Накануне разрушения: нерассказанная история Войны Судного дня . ХарперКоллинз. ISBN 9780060013998 .
- ^ Вагнер 1982 , с. 202.
- ^ Вагнер 1982 , с. 200, 212.
- ^ Перейти обратно: а б Вагнер 1982 , с. 208.
- ^ «Краткая история БПЛА» . Howstuffworks.com. 22 июля 2008 г. Архивировано из оригинала 22 мая 2013 г. . Проверено 8 января 2015 г.
- ^ «Россия закупает партию израильских БПЛА» . Strategypage.com. Архивировано из оригинала 26 октября 2013 года . Проверено 8 января 2015 г.
- ^ Азулаи, Юваль (24 октября 2011 г.). «Беспилотные боевые машины формируют войну будущего» . Глобусы . Архивировано из оригинала 3 декабря 2013 года . Проверено 8 января 2015 г.
- ^ Левинсон, Чарльз (13 января 2010 г.). «Израильские роботы переделают поле битвы» . Уолл Стрит Джорнал . п. А10. Архивировано из оригинала 13 марта 2020 года . Проверено 13 января 2010 г.
- ^ Гал-Ор, Бенджамин (1990). Векторное движение, сверхманевренность и летательные аппараты-роботы . Спрингер Верлаг. ISBN 978-3-540-97161-0 .
- ^ Фуллер, Кристофер Дж. (2015). «Орел возвращается домой на насест: историческое истоки программы ЦРУ по смертоносным дронам» . Разведка и национальная безопасность . 30 (6): 769–792. дои : 10.1080/02684527.2014.895569 . S2CID 154927243 .
- ^ З. Горай; А. Фридрыхевич; Р. Свиткевич; Б. Херник; Дж. Гадомски; Т. Гетцендорф-Грабовский; М. Фигат; Святой Суходольский; В. Чаец. отчет (PDF) . Бюллетень Польской академии наук, Технические науки, Том 52. Номер 3, 2004 г. Архивировано (PDF) из оригинала 4 марта 2016 г. . Проверено 9 декабря 2015 г.
- ^ Информационная служба общественных исследований и разработок . Гражданское применение БПЛА и экономическая эффективность потенциальных конфигурационных решений . опубликовано Издательским бюро Европейского Союза. Архивировано из оригинала 29 января 2016 года . Проверено 9 декабря 2015 г.
- ^ Акерман, Спенсер; Шахтман, Ной (9 января 2012 г.). «Почти каждый третий военный самолет США — робот» . ПРОВОДНОЙ . Архивировано из оригинала 23 марта 2020 года . Проверено 8 января 2015 г.
- ^ Перейти обратно: а б Сингер, Питер В. «Еще одна революция: беспилотные системы и Ближний Восток». Архивировано 6 августа 2011 года в Wayback Machine , Брукингский институт. Архивировано 26 января 2018 года в Wayback Machine , ноябрь 2009 года.
- ^ Радсан, Эй Джей; Мерфи (2011). «Измерь дважды, стреляй один раз: повышенная осторожность в отношении убийств, направленных ЦРУ». унив. Иллинойс. Закон, ред.: 1201–1241 .
- ^ Сэйлер (2015)
- ^ Франке, Ульрика Эстер [«Глобальное распространение беспилотных летательных аппаратов (БПЛА) или дронов»], в книге Майка Ааронсона (редактор) Precision Strike Warfare and International Intervention, Routledge 2015.
- ^ Хэмблинг, Дэвид. «Возможно, дроны впервые атаковали людей полностью автономно» . Новый учёный . Архивировано из оригинала 30 июля 2021 года . Проверено 30 мая 2021 г.
- ^ «Дрон-убийца «выследил человека» без приказа» . Нью-Йорк Пост . 29 мая 2021 г. Архивировано из оригинала 30 июля 2021 г. Проверено 30 мая 2021 г.
- ^ Форестье-Уокер, Робин (13 октября 2020 г.). «Нагорный Карабах: Новое оружие для старого конфликта таит в себе опасность» . Аль Джазира. Архивировано из оригинала 13 октября 2020 года . Проверено 18 декабря 2021 г.
[...] видео боевых действий и известные военные возможности двух воюющих сторон позволяют предположить, что у Азербайджана есть технологическое преимущество, особенно благодаря его боевым беспилотникам, приобретенным у Израиля и Турции.
- ^ Байлон-Руис, Рафаэль; Лакруа, Симон; Бит-Монно, Артур (октябрь 2018 г.). «Планирование мониторинга лесных пожаров с помощью парка БПЛА» . Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) 2018 г. Мадрид: IEEE. стр. 4729–4734. дои : 10.1109/IROS.2018.8593859 . ISBN 978-1-5386-8094-0 . S2CID 52970107 . Архивировано из оригинала 29 декабря 2022 года . Проверено 11 января 2023 г.
- ^ Хилл, Джон (7 мая 2024 г.). «Информация: рынок БПЛА, по прогнозам, вырастет почти вдвое за десять лет» . Армейские технологии . Проверено 8 мая 2024 г.
- ^ «Проектирование, моделирование и новые применения беспилотных летательных аппаратов» . www.mdpi.com . Проверено 24 марта 2023 г.
- ^ Нагель, Хууб; Бондт, Герт; Кастерс, Барт; Вергу, Бас (16 июля 2016 г.). «Технология дронов: типы, полезная нагрузка, применение, проблемы частотного спектра и будущие разработки» . Будущее использования дронов .
- ^ да Силва, ФБ; Скотт, SD; Каммингс, М.Л. (декабрь 2007 г.). «Методология проектирования для координации группы беспилотных летательных аппаратов (БПЛА)» (PDF) . Методология проектирования для координации группы беспилотных летательных аппаратов (БПЛА) .
- ^ Торрес-Санчес, Джордж; Лопес-Гранадос, Франциска; Кастро, Ханна Элизабет Де; Рок-Барраган, Хосе Мануэль (6 марта 2013 г.). «Конфигурация и характеристики беспилотного летательного аппарата (БПЛА) для ранней борьбы с сорняками на конкретном участке» . ПЛОС ОДИН 8 (3): e58210. Бибкод : 2013PLoSO... 858210T дои : 10.1371/journal.pone.0058210 . ISSN 1932-6203 . ПМК 3590160 . ПМИД 23483997 .
- ^ Торрес-Санчес, Джордж; Лопес-Гранадос, Франциска; Де Кастро, Ханна Элизабет; Рок-Барраган, Хосе Мануэль (2013). «Конфигурация и характеристики беспилотного летательного аппарата (БПЛА) для ранней борьбы с сорняками на конкретном участке» . ПЛОС ОДИН 8 (3): e58210. Бибкод : 2013PLoSO... 858210T дои : 10.1371/journal.pone.0058210 . ISSN 1932-6203 . ПМК 3590160 . ПМИД 23483997 .
- ^ «Создатель истории авиамоделей Мейнард Хилл умирает в возрасте 85 лет» . Вашингтон Пост . Архивировано из оригинала 4 июля 2018 года . Проверено 17 мая 2018 г.
- ^ Чирараттананон, Пакет; Ма, Кевин Ю; Вуд, Дж. (22 мая 2014 г.), «Адаптивное управление роботом с машущими крыльями миллиметрового масштаба» (PDF) , Bioinspiration & Biomimetics , 9 (2): 025004, Bibcode : 2014English....9b5004C , CiteSeerX 10.1.1.650 .3728 , doi : 9/2/ , PMID 24855052 , S2CID 12799012 / 1748-3182 025004 10.1088 /
- ^ Сара Кнаптон (29 марта 2016 г.). «Гигантские дистанционно управляемые жуки и насекомые-биоботы могут заменить дроны» . Телеграф . Архивировано из оригинала 1 апреля 2016 года.
- ^ Антонио (11 июля 2024 г.). «EASA утверждает основу сертификации ETSO для автопилота Veronte» . Эмбенция . Проверено 2 августа 2024 г.
- ^ Перейти обратно: а б с Флореано, Дарио; Вуд, Роберт Дж. (27 мая 2015 г.). «Наука, технологии и будущее малых автономных дронов» . Природа . 521 (7553): 460–466. Бибкод : 2015Natur.521..460F . дои : 10.1038/nature14542 . ПМИД 26017445 . S2CID 4463263 . Архивировано из оригинала 26 октября 2019 года . Проверено 26 октября 2019 г.
- ^ Фазано, Джанкармине; Аккардо, Доменико; Тирри, Анна Елена; Мочча, Антонио; Де Леллис, Этторе (1 октября 2015 г.). «Объединение радиолокационных и электрооптических данных для некооперативного обнаружения и предотвращения БПЛА» . Аэрокосмическая наука и технология . 46 : 436–450. Бибкод : 2015AeST...46..436F . дои : 10.1016/j.ast.2015.08.010 .
- ^ «Игровая площадка Arduino — WhatIsDegreesOfFreedom6DOF9DOF10DOF11DOF» . игровая площадка.arduino.cc . Архивировано из оригинала 18 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ Манфреда, Сальваторе; Маккейб, Мэтью; Миллер, Полина; Лукас, Ричард; Пахуэло Мадригал, Виктор; Маллинис, Гиоргос; Бен Дор, Эяль; Хелман, Дэвид; Эстес, Линдон; Чираоло, Джузеппе; Мюллерова, Яна; Тауро, Флавия; де Лима, М.; де Лима, Жуан; Мальтийский, Антонино (20 апреля 2018 г.). «О применении беспилотных авиационных систем для мониторинга окружающей среды» . Дистанционное зондирование . 10 (4): 641. Бибкод : 2018RemS...10..641M . дои : 10.3390/rs10040641 . hdl : 10251/127481 . ISSN 2072-4292 .
- ^ Карлсон, Дэниел Ф.; Рюсгаард, Сёрен (1 января 2018 г.). «Адаптация автопилотов дронов с открытым исходным кодом для наблюдения за айсбергами в реальном времени» . МетодыX . 5 : 1059–1072. дои : 10.1016/j.mex.2018.09.003 . ISSN 2215-0161 . ПМК 6139390 . ПМИД 30225206 .
- ^ Леско, Дж.; Шрайнер, М.; Мегеси, Д.; Ковач, Левенте (ноябрь 2019 г.). «Автопилот Pixhawk PX-4 управляет небольшим беспилотным самолетом» . 2019 Современные технологии безопасности на транспорте (МОСАТТ) . Кошице, Словакия: IEEE. стр. 90–93. дои : 10.1109/MOSATT48908.2019.8944101 . ISBN 978-1-7281-5083-3 . S2CID 209695691 . Архивировано из оригинала 27 февраля 2023 года . Проверено 8 октября 2020 г.
- ^ Пьер-Жан Бристо; Франсуа Каллу; Дэвид Виссьер; Николя Пети (2011). «Технология навигации и управления внутри микроБПЛА AR.Drone» (PDF) . Всемирный конгресс МФБ . Архивировано (PDF) из оригинала 27 февраля 2023 года . Проверено 4 февраля 2016 г.
- ^ «Сотовая связь обеспечивает более безопасное развертывание дронов» . Квалкомм . Архивировано из оригинала 9 мая 2018 года . Проверено 9 мая 2018 г.
- ^ «Определение критически важных навыков взаимодействия пилотируемых и беспилотных летательных аппаратов для операторов беспилотных авиационных систем» (PDF) . Научно-исследовательский институт поведенческих и социальных наук армии США . Сентябрь 2012 г. Архивировано (PDF) из оригинала 6 февраля 2016 г.
- ^ «Минимальные требования, связанные с техническими характеристиками радиоинтерфейса(ов) IMT-2020» . www.itu.int . Архивировано из оригинала 6 августа 2020 года . Проверено 8 октября 2020 г.
- ^ Виноградов Евгений; Кумар, AVS Саи Бхаргав; Минуччи, Франко; Поллин, Софи; Наталицио, Энрико (2023). «Удаленный идентификатор для обеспечения разделения и мультиагентной навигации». 2023 IEEE/AIAA 42-я конференция по цифровым авиационным системам (DASC) . стр. 1–10. arXiv : 2309.00843 . дои : 10.1109/DASC58513.2023.10311133 . ISBN 979-8-3503-3357-2 .
- ^ «Автоматизированные транспортные средства для безопасности | НАБДД» . www.nhtsa.gov . Архивировано из оригинала 7 октября 2021 года . Проверено 8 октября 2021 г.
- ^ Клаф, Брюс (август 2002 г.). «Метрики, шметрики! Как, черт возьми, вы вообще определяете автономность БПЛА?» . Исследовательская лаборатория ВВС США . Архивировано из оригинала 24 сентября 2020 года.
- ^ Давенпорт, Кристиан (23 апреля 2015 г.). «Посмотрите один шаг в истории военно-морского флота: автономный дрон дозаправляется в воздухе» . Вашингтон Пост . ISSN 0190-8286 . Архивировано из оригинала 20 января 2016 года . Проверено 3 февраля 2016 г.
- ^ «Обучение крошечных дронов самостоятельному полету» . Арс Техника . 27 ноября 2012 года. Архивировано из оригинала 5 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ «Лаборатория биомиметики и ловких манипуляций – Мультимодальные роботы» . bdml.stanford.edu . Архивировано из оригинала 23 марта 2016 года . Проверено 21 марта 2016 г.
- ^ Д'Андреа, Рафаэлло (11 июня 2013 г.). «Поразительная спортивная мощь квадрокоптеров» . www.ted.com . Архивировано из оригинала 5 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ Янго, Сун; Хуаньцзинь, Ван (1 июня 2009 г.). «Проектирование системы управления полетом малого беспилотного летательного аппарата с поворотным винтом» . Китайский журнал аэронавтики . 22 (3): 250–256. Бибкод : 2009ЧЯН..22..250Г . дои : 10.1016/S1000-9361(08)60095-3 .
- ^ «Устройство, предназначенное для посадки БПЛА вертолетного типа на ровную вертикальную поверхность» . патенты.google.com . Архивировано из оригинала 7 марта 2017 года . Проверено 6 ноября 2016 г.
- ^ «Важность правильного охлаждения и воздушного потока для оптимальной работы дрона» . Пелонис Технологии . Архивировано из оригинала 22 июня 2018 года . Проверено 22 июня 2018 г.
- ^ «Полет на водороде: исследователи из Технологического института Джорджии используют топливные элементы для питания беспилотных летательных аппаратов | Технологический исследовательский институт Джорджии» . www.gtri.gatech.edu . Архивировано из оригинала 3 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ «Квадрокоптер Hycopter, работающий на водороде, может летать по 4 часа за раз» . www.gizmag.com . 20 мая 2015 года. Архивировано из оригинала 4 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ Гиббс, Ивонн (31 марта 2015 г.). «Информационный бюллетень НАСА Армстронг: Мощность лазерного излучения для БПЛА» . НАСА . Архивировано из оригинала 5 апреля 2019 года . Проверено 22 июня 2018 г.
- ^ Вертикальный вызов: «Небесные монстры» (PDF) , заархивировано из оригинала (PDF) 11 сентября 2013 г.
- ^ «Дженерал Атомикс Комар» . Обозначение-systems.net. Архивировано из оригинала 11 декабря 2008 года . Проверено 8 января 2015 г.
- ^ «Заметки о БПЛА» . Архивировано из оригинала 30 июля 2013 года.
- ^ «Трансатлантическая модель» . Там.plannet21.com. Архивировано из оригинала 22 мая 2016 года . Проверено 8 января 2015 г.
- ^ «БПЛА Zephyr от QinetiQ превышает официальный мировой рекорд по продолжительности беспилотного полета» (пресс-релиз). QinetiQ. 10 сентября 2007 г. Архивировано из оригинала 23 апреля 2011 г.
- ^ Симонит, Том. «Блог новых научных технологий: солнечный самолет на пути к вечному полету» . Новый учёный . Архивировано из оригинала 2 апреля 2015 года . Проверено 8 января 2015 г.
- ^ «Беспилотный самолет Global Hawk компании Northrop Grumman установил рекорд продолжительности полета за 33 часа» . Spacewar.com. Архивировано из оригинала 1 июля 2013 года . Проверено 27 августа 2013 г.
- ^ «БПЛА Zephyr компании QinetiQ летает три с половиной дня, чтобы установить неофициальный мировой рекорд по продолжительности беспилотного полета» (пресс-релиз). QinetiQ. 24 августа 2008 г. Архивировано из оригинала 24 мая 2011 г.
- ^ «QinetiQ установила три мировых рекорда для своего БПЛА Zephyr Solar с двигателем» . QinetiQ (пресс-релиз). 24 августа 2010 г. Архивировано из оригинала 24 сентября 2010 г.
- ^ Макдональд, Алистер (14 июля 2023 г.). «Дроны достигают стратосферных высот в стремлении летать выше и дольше» . Wall Street Journal – через www.wsj.com.
- ^ Бониол (декабрь 2014 г.). «На пути к модульной и сертифицированной авионике для БПЛА» (PDF) . Журнал аэрокосмической лаборатории . Архивировано (PDF) из оригинала 4 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ Д. Бошкович и Кнобель (2009). «Сравнительное исследование нескольких стратегий адаптивного управления для устойчивого управления полетом» (PDF) . Конференция AIAA по руководству, навигации и управлению . Архивировано из оригинала (PDF) 4 февраля 2016 года.
- ^ Аткинс. «Сертифицируемое автономное управление полетом беспилотных авиационных систем» . Мичиганский университет . Архивировано из оригинала 5 марта 2017 года . Проверено 4 февраля 2016 г.
- ^ Субхав Прадхан; Уильям Отте; Абхишек Дубей; Анируддха Гохале; Габор Карсай (2013). «Ключевые аспекты отказоустойчивой и автономной инфраструктуры развертывания и настройки киберфизических систем» (PDF) . Кафедра электротехники и компьютерных наук Университета Вандербильта, Нэшвилл . Архивировано (PDF) из оригинала 4 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ «Как полеты автономных дронов выйдут за пределы прямой видимости» . Наанализировать . 31 декабря 2019 года. Архивировано из оригинала 20 мая 2020 года . Проверено 16 апреля 2020 г.
- ^ Макнабб, Мириам (28 февраля 2020 г.). «Дроны быстрее включают свет для сообществ Флориды» . ДРОНЖИЗНЬ . Архивировано из оригинала 12 марта 2020 года . Проверено 16 апреля 2020 г.
- ^ Пек, Абэ (19 марта 2020 г.). «Коронавирус стимулирует разработку решения Percepto для наблюдения «дрон-в-коробке»» . Внутри беспилотных систем . Архивировано из оригинала 24 марта 2020 года . Проверено 16 апреля 2020 г.
- ^ Валле, Роберто Г. (январь 2022 г.). «Быстрый полуавтоматический учет зимующих больших фламинго (Phoenicopterus roseus) с помощью дронов как инструмент для исследователей-любителей» . Ибис . 164 (1): 320–328. дои : 10.1111/ibi.12993 . ISSN 0019-1019 . S2CID 237865267 . Архивировано из оригинала 13 октября 2022 года . Проверено 13 октября 2022 г.
- ^ Перейти обратно: а б Мадемлис, Иоаннис; Николаидис, Никос; Тефас, Анастасиос; Питас, Иоаннис; Вагнер, Тилман; Мессина, Альберто (2019). «Кинематография с автономными БПЛА: учебное пособие и формализованная таксономия кадров» . Обзоры вычислительной техники ACM . 52 (5). Ассоциация вычислительной техники. дои : 10.1145/3347713 . S2CID 202676119 . Архивировано из оригинала 3 ноября 2022 года . Проверено 3 ноября 2022 г.
- ^ Горовиц, Майкл К. (2020). «Имеют ли новые военные технологии значение для международной политики?» . Ежегодный обзор политической науки . 23 (1): 385–400. doi : 10.1146/annurev-polisci-050718-032725 .
- ^ Перейти обратно: а б «Усиление турецкой политики в отношении экспорта дронов» . Международный фонд Карнеги. Архивировано из оригинала 23 марта 2022 года . Проверено 17 марта 2022 г.
- ^ Перейти обратно: а б с «Оборонная промышленность Турции планирует экспортировать в этом году более 4 миллиардов долларов: официально» . Hürriyet Daily News. 6 марта 2022 года. Архивировано из оригинала 17 марта 2022 года . Проверено 17 марта 2022 г.
- ^ «Боевые дроны в Китае приближаются к конфликту рядом с вами» . www.intelligent-aerospace.com . 19 марта 2021 года. Архивировано из оригинала 7 июня 2021 года . Проверено 7 июня 2021 г.
- ^ Перейти обратно: а б с д и «Рынок военных дронов вырастет» . 27 октября 2016 г. Архивировано из оригинала 19 февраля 2018 г. Проверено 19 февраля 2018 г.
- ^ Перейти обратно: а б «Турецкая оборонная промышленность растет, поскольку БПЛА Akinci подписывает первую экспортную сделку» . TRTWORLD. 23 января 2022 года. Архивировано из оригинала 30 января 2022 года . Проверено 17 марта 2022 г.
- ^ Перейти обратно: а б Арнетт, Джордж (16 марта 2015 г.). «Цифры мировой торговли БПЛА» . Хранитель . Архивировано из оригинала 19 декабря 2016 года . Проверено 13 декабря 2016 г.
- ^ «Планы Пентагона по сокращению бюджетов на дроны» . Министерство обороны Базз . 2 января 2014 года. Архивировано из оригинала 8 января 2015 года . Проверено 17 марта 2022 г.
- ^ «Находится ли Китай в авангарде технологий дронов?» . Центр стратегических и международных исследований . 29 мая 2018 г.
- ^ Сон Хён Чхве (25 ноября 2023 г.). «Технологии дронов дают Китаю преимущество в продажах оружия на Ближнем Востоке, но война между Израилем и сектором Газа несет в себе риски: аналитики» . Южно-Китайская Морнинг Пост .
- ^ Перейти обратно: а б Сомервилл, Хизер (9 ноября 2023 г.). «Китайский, американский — не имеет значения. Израилю нужны недорогие дроны» . Уолл Стрит Джорнал .
- ^ Сков, Сэм (1 мая 2024 г.). «Великобритания ищет китайские запчасти для дронов для Украины» . Защита Один .
- ^ Джо, Рик (5 февраля 2020 г.). «Военные достижения Китая в 2010-е годы: воздух и земля» . Дипломат .
- ^ Бейтман, Джошуа (1 сентября 2017 г.). «Китайский производитель дронов DJI: один на вершине беспилотного неба» . Новости Ледж . Архивировано из оригинала 19 февраля 2018 года . Проверено 19 февраля 2018 г.
- ^ Анвар, Несса (7 февраля 2023 г.). «Крупнейший в мире производитель дронов не обеспокоен, даже если он внесен в черный список США», CNBC .
- ^ Фридман, Лиза; Маккейб, Дэвид (29 января 2020 г.). «Министерство внутренних дел заземляет свои дроны из-за опасений китайского шпионажа» . Нью-Йорк Таймс . ISSN 0362-4331 . Архивировано из оригинала 29 января 2020 года . Проверено 17 ноября 2020 г.
- ^ Миллер, Мэгги (8 октября 2020 г.). «Министерство юстиции запрещает использование грантовых средств для некоторых дронов иностранного производства» . Холм . Архивировано из оригинала 28 ноября 2020 года . Проверено 17 ноября 2020 г.
- ^ «Рыночная доля DJI: вот как быстро она выросла всего за несколько лет» . Блог Emberify . 18 сентября 2018 г. Архивировано из оригинала 24 сентября 2018 г. Проверено 18 сентября 2018 г.
- ^ Дейли, Дэвид (2021). «5 крупнейших производителей дронов, питающих отрасль» . Консортик .
- ^ «БПЛА в цифрах» . www.faa.gov . Архивировано из оригинала 17 мая 2021 года . Проверено 24 мая 2021 г.
- ^ «Потребительские дроны в цифрах в 2018 году и далее | News Ledge» . Новости Ледж . 4 апреля 2017 г. Архивировано из оригинала 14 октября 2018 г. Проверено 13 октября 2018 г.
- ^ «Skylark Drones собирается собрать первый раунд финансирования для стимулирования расширения» . 14 сентября 2015 года. Архивировано из оригинала 14 сентября 2016 года . Проверено 28 августа 2016 г.
- ^ Петерсон, Андреа (19 августа 2013 г.). «Государства соревнуются за право стать Силиконовой долиной дронов» . Вашингтон Пост . ISSN 0190-8286 . Архивировано из оригинала 13 февраля 2016 года . Проверено 4 февраля 2016 г.
- ^ «Курсы обучения дронам – полный список» . Маркетолог дронового бизнеса . Архивировано из оригинала 16 ноября 2016 года . Проверено 1 декабря 2016 г.
- ^ «ЦАХАЛ покупает массовые дроны DJI» . Джейн 360 . Архивировано из оригинала 11 декабря 2017 года.
- ^ Гринвуд, Фейн (16 августа 2017 г.). «Военные США не должны использовать коммерческие дроны» . Сланец . ISSN 1091-2339 . Архивировано из оригинала 17 апреля 2018 года . Проверено 2 июня 2023 г.
- ^ «DJI выиграла войну дронов и теперь расплачивается за это» . Блумберг . 26 марта 2020 г. Архивировано из оригинала 19 ноября 2020 г. . Проверено 18 ноября 2020 г. .
- ^ «DJI и Департамент общественной безопасности Синьцзянского автономного района формируют стратегическое партнерство в области полицейских дронов» YouUAV.com , 24 декабря 2017 г. из оригинала 18 декабря . 2020 г. Архивировано
- ^ «Следующий рубеж полицейского наблюдения — дроны» . Сланец . 7 июня 2018 года. Архивировано из оригинала 11 декабря 2019 года . Проверено 10 декабря 2019 г.
- ^ «Эти полицейские дроны следят за тобой» . Проект «О государственном надзоре» . 25 сентября 2018 г. Архивировано из оригинала 11 декабря 2019 г. Проверено 10 декабря 2019 г.
- ^ Сангма, Майк (25 декабря 2022 г.). «У Украины есть маловероятный союзник в борьбе с Россией: дроны DJI» . Восточный Моджо . Архивировано из оригинала 20 февраля 2023 года . Проверено 26 декабря 2022 г.
- ^ Гринвуд, Фейн (16 февраля 2023 г.). «Война дронов в Украине дешева, смертоносна и сделана в Китае» . Архивировано из оригинала 26 сентября 2023 года . Проверено 6 марта 2023 г.
- ^ «Световые шоу дронов на базе Intel» . Интел . Архивировано из оригинала 23 июня 2021 года . Проверено 28 июня 2021 г.
- ^ Хирш, Лорен (1 июля 2023 г.). «У фейерверков появился новый конкурент: дроны» . Нью-Йорк Таймс . Проверено 10 августа 2023 г.
- ^ «Фейерверки и дроны объединяются для создания удивительных изображений с длинной выдержкой» . Мох и Туман . 1 мая 2023 г. Проверено 10 августа 2023 г.
- ^ «Кинодрон AERIGON (БПЛА) – новатор в кинопроизводстве» . Архивировано из оригинала 26 августа 2021 года . Проверено 26 августа 2021 г.
- ^ Феррейра, Эдгар; Чендлер, Джим; Вакроу, Рене; Сионо, Кодзи (апрель 2017 г.). «Автоматическое извлечение топографии свободной поверхности с использованием фотограмметрии SfM-MVS» . Измерение расхода и контрольно-измерительные приборы . 54 : 243–249. Бибкод : 2017FloMI..54..243F . doi : 10.1016/j.flowmeasinst.2017.02.001 . S2CID 56307390 .
- ^ Редди, К. Судхакар; Куриан, Аюши; Шривастава, Гаурав; Сингхал, Джаянт; Варгезе, АО; Падала, Хитендра; Айяппан, Н.; Раджашекар, Г.; Джа, CS; Рао, ПВН (январь 2021 г.). «Дистанционное зондирование позволило использовать важные переменные биоразнообразия для оценки и мониторинга биоразнообразия: технологические достижения и потенциал» . Биоразнообразие и сохранение . 30 (1): 1–14. Бибкод : 2021BiCon..30....1R . дои : 10.1007/s10531-020-02073-8 . ISSN 0960-3115 . S2CID 254281346 . Архивировано из оригинала 27 февраля 2023 года . Проверено 12 января 2023 г.
- ^ Гонсалвеш, Жуан; Энрикес, Ренато; АЛВЕС, Пауло; СОУЗА-СИЛЬВА, Рита; МОНТЕЙРО, Антониу Т.; Ломба, Анджела; Маркос, Бруно; Уважаемый, Джон (январь 2016 г.). Роккини, Дуччо (ред.). «Оценка неконтролируемого подхода с использованием летательных аппаратов к оценке протяженности и состояния среды обитания в первых мелкомасштабных горных мозаиках» . Прикладная наука о растительности . 19 (1): 132–146. Бибкод : 2016AppVS..19..132G . дои : 10.1111/avsc.12204 . Архивировано из оригинала 12 января 2023 года . Проверено 12 января 2023 г.
- ^ Барбизан Зюс, Р.; Циллер, СР; Дешум, М. (2023). «Является ли использование дронов экономически эффективным и эффективным для обнаружения инвазивных чужеродных деревьев? Тематическое исследование из субтропической прибрежной экосистемы». Биологические инвазии . 26 (2): 357–363. дои : 10.1007/s10530-023-03190-5 . S2CID 265016887 .
- ^ Чжан, Чуньхуа; Ковач, Джон М. (декабрь 2012 г.). «Применение малых беспилотных авиационных комплексов для точного земледелия: обзор» . Точное земледелие . 13 (6): 693–712. дои : 10.1007/s11119-012-9274-5 . ISSN 1385-2256 . S2CID 254938502 . Архивировано из оригинала 27 февраля 2023 года . Проверено 12 января 2023 г.
- ^ Перкс, Мэтью Т.; Рассел, Эндрю Дж.; Лардж, Эндрю Р.Г. (5 октября 2016 г.). «Техническое примечание: Достижения в области мониторинга ливневых паводков с использованием беспилотных летательных аппаратов (БПЛА)» . Гидрология и науки о системе Земли . 20 (10): 4005–4015. Бибкод : 2016HESS...20.4005P . дои : 10.5194/hess-20-4005-2016 . ISSN 1607-7938 . Архивировано из оригинала 12 января 2023 года . Проверено 12 января 2023 г.
- ^ Чжоу, Цзяньго; Он, Линьшу; Ло, Хайтао (19 марта 2023 г.). «Метод позиционирования БПЛА в реальном времени в сложных сценариях мониторинга состояния конструкций» . Дроны . 7 (3): 212. дои : 10.3390/drones7030212 . ISSN 2504-446X .
- ^ «Анализ и прогноз мирового рынка сельскохозяйственных дронов и роботов, 2018–2028 гг. — ResearchAndMarkets.com» . финансы.yahoo.com . Архивировано из оригинала 7 июля 2019 года . Проверено 23 мая 2019 г.
- ^ «Проблемы сельского хозяйства в Африке решаются с помощью дронов» . Дроновые наркоманы . 12 марта 2018 г. Архивировано из оригинала 29 июня 2018 г. Проверено 23 мая 2019 г.
- ^ «Дроны, запускающие горящие шары, тестируются для борьбы с лесными пожарами» . NPR.org . Архивировано из оригинала 25 апреля 2018 года . Проверено 5 апреля 2018 г.
- ^ Старый JM, Лин Ш., Франклин MJM (2019). Картирование нор голоносого вомбата ( Vombatus ursinus ) с помощью дрона. БМК Экология. 19:39. DOI: 10.1186/s12898-019-0257-5
- ^ Фауст, Дэниел Р. (2015). Полицейские дроны (1-е изд.). Rosen Publishing Group, Inc. Нью-Йорк: ISBN 9781508145028 . Архивировано из оригинала 27 февраля 2023 года . Проверено 20 февраля 2020 г.
- ^ Синди и Зарей (15 сентября 2023 г.). «Дроны в гуманитарной помощи – могут ли они изменить правила игры?» .
- ^ Дент, Стив (16 октября 2017 г.). «Дрон впервые сбил коммерческий самолет в Канаде» . Engadget. Архивировано из оригинала 16 октября 2017 года . Проверено 16 октября 2017 г.
- ^ Теллман, Джули (28 сентября 2018 г.). «Первое в истории зафиксированное столкновение дрона и воздушного шара заставляет задуматься о безопасности» . Новости Тетон-Вэлли . Бойсе, Айдахо, США: Почтовая регистрация в Бойсе. Архивировано из оригинала 3 октября 2018 года . Проверено 3 октября 2018 г.
- ^ «Дроны необходимо поощрять, а людей защищать» . Экономист . 26 января 2019 г. ПроКвест 2171135630 . Архивировано из оригинала 27 июня 2020 года . Проверено 28 июня 2020 г.
- ^ Халон, Эйтан (21 декабря 2018 г.). «Израильская технология борьбы с дронами положила конец хаосу в аэропорту Гатвик – Международные новости – Иерусалим Пост» . jpost.com . Архивировано из оригинала 22 декабря 2018 года . Проверено 22 декабря 2018 г.
- ^ Мэтью Уивер; Дэмиен Гейл; Патрик Гринфилд; Фрэнсис Перроден (20 декабря 2018 г.). «Военные вызвали помощь в разрешении кризиса с дронами в Гатвике» . Хранитель . Архивировано из оригинала 22 декабря 2018 года . Проверено 22 декабря 2018 г.
- ^ «В самый разгар дроны мешают пожарным» . NPR.org . Архивировано из оригинала 5 марта 2018 года . Проверено 5 апреля 2018 г.
- ^ Майкл Мартинес; Пол Веркаммен; Бен Брамфилд (18 июля 2015 г.). «Дроны посещают лесные пожары в Калифорнии, вызывая гнев пожарных» . CNN . Архивировано из оригинала 8 ноября 2016 года . Проверено 22 августа 2016 г. .
- ^ Медина, Дженнифер (19 июля 2015 г.). «В погоне за видео с помощью дронов любители ставят под угрозу усилия пожаротушения Калифорнии» . Нью-Йорк Таймс . Архивировано из оригинала 21 июля 2015 года на сайте NYTimes.com.
- ^ Роша, Вероника (21 июля 2015 г.). «Атака на дроны: законодательство может позволить калифорнийским пожарным уничтожить их» . Архивировано из оригинала 28 августа 2016 года . Проверено 22 августа 2016 г. - через LA Times.
- ^ «Тюрьмы работают, чтобы не допускать дронов, занимающихся контрабандой наркотиков» . NPR.org . Архивировано из оригинала 19 января 2018 года . Проверено 19 января 2018 г.
- ^ Майк Маунт; Элейн Кихано. «Иракские повстанцы взломали каналы связи с дронами Predator, - заявил американский чиновник» . CNN.com . Архивировано из оригинала 5 марта 2017 года . Проверено 6 декабря 2016 г.
- ^ Уолтерс, Сандер (29 октября 2016 г.). «Как можно взломать дроны? Обновленный список уязвимых дронов и инструментов атаки» . Середина . Архивировано из оригинала 23 июля 2018 года . Проверено 6 декабря 2016 г.
- ^ Глейзер, апрель (4 января 2017 г.). «Правительство США показало, насколько легко взломать дроны, созданные компаниями Parrot, DBPower и Cheerson» . Перекодировать . Архивировано из оригинала 5 января 2017 года . Проверено 6 января 2017 г.
- ^ «Технология борьбы с дронами будет испытана на британской базе на фоне опасений терроризма» . 6 марта 2017 года. Архивировано из оригинала 7 мая 2017 года . Проверено 9 мая 2017 г.
- ^ Исаак-Медина, Брайан К.С.; Пойзер, Мэтью; Органищак, Дэниел; Уиллкокс, Крис Г.; Брекон, Тоби П.; Шум, Хьюберт П.Х. (2021). Визуальное обнаружение и отслеживание беспилотных летательных аппаратов с использованием глубоких нейронных сетей: тест производительности . стр. 1223–1232. arXiv : 2103.13933 .
- ^ Органищак, Дэниел; Пойзер, Мэтью; Альсехаим, Аиша; Ху, Шаньфэн; Исаак-Медина, Брайан К.С.; Брекон, Тоби П.; Шум, Хьюберт П.Х. (2022). «UAV-ReID: эталон повторной идентификации беспилотных летательных аппаратов в видеоизображениях». Материалы 17-й Международной совместной конференции по компьютерному зрению, теории и приложениям обработки изображений и компьютерной графики . СайТеПресс. стр. 136–146. arXiv : 2104.06219 . дои : 10.5220/0010836600003124 . ISBN 978-989-758-555-5 .
- ^ «Хитроу выбирает C-UAS для борьбы с сбоями в работе дронов» . Архивировано из оригинала 9 ноября 2019 года . Проверено 13 марта 2019 г.
- ^ «Международный аэропорт Маската установит систему противодействия БПЛА Aaronia стоимостью 10 миллионов долларов США» . 21 января 2019 года. Архивировано из оригинала 9 ноября 2019 года . Проверено 21 января 2019 г.
- ^ Гран-Клеман, Сара; Бажон, Тео (19 октября 2022 г.). «Беспилотные авиационные системы: учебник для начинающих» . Институт ООН по исследованию проблем разоружения . Архивировано из оригинала 5 января 2023 года . Проверено 5 января 2023 г.
{{cite journal}}: CS1 maint: bot: исходный статус URL неизвестен ( ссылка ) - ^ Хартли, Джон; Шум, Хьюберт П.Х.; Хо, Эдмонд С.Л.; Ван, Хэ; Рамамурти, Субраманиан (2022). «Управление пластом БПЛА с использованием подхода, управляемого потоком». Экспертные системы с приложениями . 205 . Эльзевир: 117665. arXiv : 2103.09184 . дои : 10.1016/j.eswa.2022.117665 . ISSN 0957-4174 . S2CID 232240581 .
- ^ «Что такое беспилотное управление дорожным движением?» . Аэробус . Архивировано из оригинала 8 февраля 2021 года . Проверено 28 января 2021 г.
- ^ Кэри, Лесли; Койн, Джеймс. «Беспилотные авиационные системы (БПЛА) ИКАО, циркуляр 328». Ежегодник БПЛА за 2011–2012 гг. – БПЛА: глобальная перспектива (PDF) . Блиенберг и Ко, стр. 112–115. Архивировано из оригинала (PDF) 4 марта 2016 года . Проверено 26 февраля 2022 г.
- ^ Бедекер, Хендрик. «Правило о дронах 2021 года: что нового? Что планируется?» . Обзор индустрии дронов . Архивировано из оригинала 17 мая 2021 года . Проверено 17 мая 2021 г.
- ^ «Обзор удаленной идентификации БПЛА» . www.faa.gov . Архивировано из оригинала 27 мая 2021 года . Проверено 29 мая 2021 г.
- ^ «Правовая битва ФАУ – сложная задача удаленного удостоверения личности» . RaceDayQuads . Архивировано из оригинала 27 мая 2021 года . Проверено 29 мая 2021 г.
- ^ «Метка класса БПЛА» . www.eudronport.com . Август 2022. Архивировано из оригинала 5 октября 2022 года . Проверено 21 февраля 2023 г.
- ^ «Официальный журнал Европейского Союза» . www.eur-lex.europa.eu . Архивировано из оригинала 1 ноября 2020 года . Проверено 20 февраля 2023 г.
Библиография
[ редактировать ]- Акс, Дэвид. Война дронов во Вьетнаме. Ручка и меч, Военный. Великобритания. (2021). ISBN 978 1 52677 026 4
- Сэйлер, Келли (июнь 2015 г.). «Мир распространённых дронов: технологическое руководство» (PDF) . Центр новой американской безопасности . Архивировано из оригинала (PDF) 6 марта 2016 года.
- Вагнер, Уильям (1982), «Молниеносные жуки и другие разведывательные дроны»; Полезная история о беспилотных самолетах-разведчиках Райана , Armed Forces Journal International: Aero Publishers, ISBN 978-0-8168-6654-0
Дальнейшее чтение
[ редактировать ]- Кэхилл, Билл (апрель 2022 г.). «Молниеносцы и охотники на бизонов: Дрон Райана модели 147 во Вьетнаме». Историк авиации (39): 18–27. ISSN 2051-1930 .
- Хилл Дж. и Роджерс А. (2014). Расцвет дронов: от Великой войны до сектора Газа . Серия коллоквиумов Университета острова Ванкувер по искусству и гуманитарным наукам .
- Хавьер Гарсия-Бернардоа; Питер Шеридан Доддс; Нил Ф. Джонсон (2016). «Количественные закономерности в войнах дронов» (PDF) . Наука прямая . Архивировано из оригинала (PDF) 6 февраля 2016 года.
- Роджерс А. и Хилл Дж. (2014). Беспилотный: война дронов и глобальная безопасность . Между строк. ISBN 9781771131544
Внешние ссылки
[ редактировать ]- Как интеллектуальные дроны формируют будущее войны. Архивировано 2 мая 2018 года в Wayback Machine , журнал Rolling Stone.