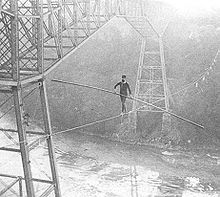
Канатоходцы используют момент инерции длинного стержня для равновесия при ходьбе по канату. Сэмюэл Диксон переправляется через реку Ниагара в 1890 году.
Для улучшения маневренности боевые самолеты сконструированы таким образом, чтобы минимизировать моменты инерции, в то время как гражданские самолеты часто этого не делают.
Момент инерции , также известный как момент инерции массы , угловая/вращательная масса , второй момент массы или, точнее, инерция вращения , твердого тела представляет собой величину, которая определяет крутящий момент, необходимый для желаемого углового ускорения около оси вращения, подобно тому, как масса определяет силу, необходимую для желаемого ускорения . Это зависит от распределения массы тела и выбранной оси: большие моменты требуют большего крутящего момента для изменения скорости вращения тела на заданную величину.
Это обширное (аддитивное) свойство: для точечной массы момент инерции равен просто массе, умноженной на квадрат перпендикулярного расстояния к оси вращения. Момент инерции жесткой составной системы представляет собой сумму моментов инерции составляющих ее подсистем (всех взятых вокруг одной оси). Его самое простое определение — это второй момент массы по отношению к расстоянию от оси .
Для тел, вынужденных вращаться в плоскости, имеет значение только их момент инерции относительно оси, перпендикулярной плоскости, скалярная величина. Для тел, свободно вращающихся в трех измерениях, их моменты могут быть описаны симметричной матрицей 3х3 с набором взаимно перпендикулярных главных осей , для которых эта матрица является диагональной , а крутящие моменты вокруг осей действуют независимо друг от друга.
Момент инерции играет роль во вращательной кинетике, которую масса (инерция) играет в линейной кинетике — оба характеризуют сопротивление тела изменениям в его движении. Момент инерции зависит от того, как распределена масса вокруг оси вращения, и будет меняться в зависимости от выбранной оси. Для точечной массы момент инерции относительно некоторой оси определяется выражением , где - расстояние точки от оси, а это масса. Для расширенного твердого тела момент инерции представляет собой просто сумму всех маленьких частей массы, умноженную на квадрат их расстояний от оси вращения. Для протяженного тела правильной формы и однородной плотности это суммирование иногда дает простое выражение, зависящее от размеров, формы и общей массы объекта.
Собственная частота колебаний составного маятника получается из отношения крутящего момента, действующего под действием силы тяжести на массу маятника, к сопротивлению ускорению, определяемому моментом инерции. Сравнение этой собственной частоты с частотой простого маятника, состоящего из одной точки массы, дает математическую формулировку момента инерции протяженного тела. [4] [5]
Момент инерции также появляется в импульсе , кинетической энергии и в законах движения Ньютона твердого тела как физический параметр, объединяющий его форму и массу. Существует интересная разница в том, как момент инерции проявляется в плоском и пространственном движении. Плоское движение имеет единственный скаляр, который определяет момент инерции, в то время как для пространственного движения те же вычисления дают матрицу моментов инерции 3 × 3, называемую матрицей инерции или тензором инерции. [6] [7]
Момент инерции вращающегося маховика используется в машине для противодействия изменениям приложенного крутящего момента и сглаживания его крутящего момента. Момент инерции самолета относительно его продольной, горизонтальной и вертикальной осей определяет, как рулевые силы на управляющих поверхностях его крыльев, рулей высоты и рулей направления влияют на движения самолета при крене, тангаже и рыскании.
Момент инерции определяется как произведение массы сечения на квадрат расстояния между базовой осью и центроидом сечения.
Вращающиеся фигуристы могут уменьшить момент инерции, вытягивая руки, что позволяет им вращаться быстрее за счет сохранения углового момента . Видео эксперимента с вращающимся стулом, иллюстрирующее момент инерции. Когда вращающийся профессор тянет руки, его момент инерции уменьшается; для сохранения углового момента его угловая скорость увеличивается.
Если угловой момент системы постоянен, то по мере уменьшения момента инерции угловая скорость должна увеличиваться. Это происходит, когда вращающиеся фигуристы вытягивают вытянутые руки или дайверы сгибают тело в группировку во время прыжка, чтобы вращаться быстрее. [8] [9] [10] [11] [12] [13] [14]
Для простого маятника это определение дает формулу для момента инерции I через массу m маятника и его расстояние r от точки поворота как:
Таким образом, момент инерции маятника зависит как от массы тела m , так и от его геометрии или формы, определяемой расстоянием r до оси вращения.
Эта простая формула обобщает определение момента инерции тела произвольной формы как сумму всех элементарных точечных масс dm, каждая из которых умножается на квадрат ее перпендикулярного расстояния r до оси k . Таким образом, момент инерции произвольного объекта зависит от пространственного распределения его массы.
В общем, для объекта массы m эффективный радиус k может быть определен в зависимости от конкретной оси вращения с таким значением, что его момент инерции вокруг оси равен где k известен как радиус вращения вокруг оси.
Математически момент инерции простого маятника представляет собой отношение крутящего момента силы тяжести вокруг оси маятника к его угловому ускорению вокруг этой точки поворота. Для простого маятника это произведение массы частицы с квадратом его расстояния до оси, то есть
Это можно показать следующим образом: сила тяжести, действующая на массу простого маятника, создает крутящий момент вокруг оси, перпендикулярной плоскости движения маятника. Здесь - вектор расстояния от оси крутящего момента до центра масс маятника, а чистая сила, действующая на массу. С этим крутящим моментом связано угловое ускорение , , струны и массы вокруг этой оси. Поскольку масса ограничена окружностью, тангенциальное ускорение массы равно . С уравнение крутящего момента принимает вид:
где – единичный вектор, перпендикулярный плоскости маятника. (Предпоследний шаг использует векторное тройное произведение с перпендикулярностью и .) Количество - это момент инерции этой единой массы вокруг точки поворота.
Количество появляется также в угловом моменте простого маятника, который вычисляется по скорости массы маятника вокруг оси вращения, где - угловая скорость массы вокруг точки поворота. Этот угловой момент определяется выражением используя вывод, аналогичный предыдущему уравнению.
Аналогично, кинетическая энергия массы маятника определяется скоростью маятника вокруг оси вращения, что дает
Это показывает, что количество это то, как масса сочетается с формой тела, определяя инерцию вращения. Момент инерции тела произвольной формы есть сумма величин для всех элементов массы тела.
Маятники, используемые в гравиметрическом аппарате Менденхолла, из научного журнала 1897 года. Портативный гравиметр, разработанный в 1890 году Томасом К. Менденхоллом, обеспечил наиболее точные относительные измерения местного гравитационного поля Земли.
Сложный маятник — это тело, образованное из совокупности частиц непрерывной формы, которое жестко вращается вокруг оси. Его момент инерции представляет собой сумму моментов инерции каждой из частиц, из которых он состоит. [15] [16] : 395–396 [17] : 51–53 Собственная частота ( ) составного маятника зависит от его момента инерции, , где это масса объекта, - местное ускорение силы тяжести, а — расстояние от точки поворота до центра масс объекта. Измерение этой частоты колебаний при небольших угловых смещениях обеспечивает эффективный способ измерения момента инерции тела. [18] : 516–517
Таким образом, чтобы определить момент инерции тела, достаточно подвесить его за удобную точку поворота. так, чтобы он свободно качался в плоскости, перпендикулярной направлению искомого момента инерции, затем измерьте его собственную частоту или период колебаний ( ), чтобы получить где — период (длительность) колебаний (обычно усредненный по нескольким периодам).
Простой маятник, имеющий ту же собственную частоту, что и составной маятник, определяет длину от оси вращения до точки, называемой центром колебаний сложного маятника. Эта точка также соответствует центру удара . Длина определяется по формуле, или
Секундный маятник , который обеспечивает «тикание» и «так» напольных часов, качается из стороны в сторону за одну секунду. Это период в две секунды или собственная частота для маятника. В этом случае расстояние до центра колебаний , можно вычислить как
Обратите внимание, что расстояние до центра колебаний секундного маятника должно быть отрегулировано с учетом различных значений местного ускорения силы тяжести. Маятник Катера представляет собой составной маятник, который использует это свойство для измерения местного ускорения силы тяжести и называется гравиметром .
Момент инерции сложной системы, такой как транспортное средство или самолет, вокруг ее вертикальной оси можно измерить, подвешивая систему в трех точках, образуя трехфилярный маятник . Трифилярный маятник представляет собой платформу, поддерживаемую тремя проводами, предназначенную для вращения при кручении вокруг своей вертикальной центроидальной оси. [19] Период колебаний трехфилярного маятника определяет момент инерции системы. [20]
Момент инерции площади также известен как второй момент площади .Эти расчеты обычно используются в гражданском строительстве для расчета конструкций балок и колонн. Площади поперечного сечения рассчитаны для вертикального момента оси x. и горизонтальный момент оси Y . Высота ( h ) и ширина ( b ) являются линейными мерами, за исключением кругов, которые фактически являются производными полуширины,
Момент площадей сечения, рассчитанный таким образом [21]
Четыре объекта с одинаковыми массами и радиусами мчатся по плоскости, катясь без скольжения. Сзади вперед:
сферическая оболочка,
твердая сфера,
цилиндрическое кольцо и
твердый цилиндр.
Время достижения каждым объектом финишной линии зависит от его момента инерции. ( версия ОГВ )
Момент инерции относительно оси тела вычисляется суммированием для каждой частицы тела, где — расстояние по перпендикуляру к указанной оси. Чтобы увидеть, как возникает момент инерции при изучении движения протяженного тела, удобно рассмотреть жесткую совокупность точечных масс. (Это уравнение можно использовать для осей, которые не являются главными осями, при условии, что оно не полностью описывает момент инерции. [22] )
Рассмотрим кинетическую энергию совокупности массы которые лежат на расстоянии от точки поворота , которая является ближайшей точкой на оси вращения. Это сумма кинетической энергии отдельных масс, [18] : 516–517 [23] : 1084–1085 [23] : 1296–1300
Отсюда следует, что момент инерции тела есть сумма всех термины, то есть
Таким образом, момент инерции – это физическое свойство, объединяющее массу и распределение частиц вокруг оси вращения. Обратите внимание, что вращение одного и того же тела вокруг разных осей дает разные моменты инерции.
Момент инерции сплошного тела, вращающегося вокруг заданной оси, рассчитывается аналогично, за исключением бесконечного числа точечных частиц. Таким образом, пределы суммирования снимаются, и сумма записывается следующим образом:
Другое выражение заменяет суммирование интегралом ,
Здесь функция дает плотность массы в каждой точке , — вектор, перпендикулярный оси вращения и идущий из точки на оси вращения в точку в твердом теле, а интегрирование оценивается по объему тела . Момент инерции плоской поверхности аналогичен, плотность массы заменяется плотностью ее площади с интегралом, вычисляемым по ее площади.
Примечание о втором моменте площади : момент инерции тела, движущегося в плоскости, и второй момент площади поперечного сечения балки часто путают. Момент инерции тела с формой поперечного сечения – это второй момент этой площади относительно -ось, перпендикулярная сечению, взвешенная по его плотности. Это также называется полярным моментом площади и представляет собой сумму вторых моментов относительно - и -оси. [24] Напряжения в балке рассчитываются с использованием второго момента площади поперечного сечения вокруг -ось или -ось в зависимости от нагрузки.
Момент инерции составного маятника, состоящего из тонкого диска, установленного на конце тонкого стержня, колеблющегося вокруг оси на другом конце стержня, начинается с расчета момента инерции тонкого стержня и тонкого диска. относительно своих центров масс. [23]
Момент инерции тонкого стержня постоянного сечения. и плотность и с длиной относительно перпендикулярной оси, проходящей через его центр масс, определяется интегрированием. [23] : 1301 Выровняйте -ось со стержнем и найдите начало координат, центр масс которого находится в центре стержня, затем где это масса стержня.
Момент инерции тонкого диска постоянной толщины , радиус и плотность вокруг оси, проходящей через его центр и перпендикулярной его грани (параллельной оси вращательной симметрии ), определяется путем интегрирования. [23] : 1301 [ не удалось пройти проверку ] Выровняйте -ось с осью диска и определим элемент объема как , затем где это его масса.
Момент инерции составного маятника теперь получается путем сложения момента инерции стержня и диска вокруг точки поворота. как, где это длина маятника. Обратите внимание, что теорема о параллельности оси используется для смещения момента инерции от центра масс к точке поворота маятника.
Список формул моментов инерции для стандартных форм тел позволяет получить момент инерции сложного тела как совокупности тел более простой формы. Теорема о параллельности оси используется для смещения опорной точки отдельных тел к опорной точке сборки.
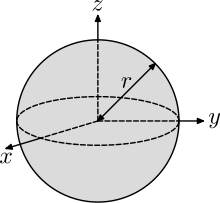
В качестве еще одного примера рассмотрим момент инерции твердого шара постоянной плотности относительно оси, проходящей через его центр масс. Это определяется суммированием моментов инерции тонких дисков, способных образовать сферу, центры которой расположены вдоль выбранной для рассмотрения оси. Если поверхность сферы определяется уравнением [23] : 1301
тогда квадрат радиуса диска в поперечном сечении вдоль -ось
Следовательно, момент инерции сферы есть сумма моментов инерции дисков вдоль -ось, где это масса сферы.
Цилиндры с более высоким моментом инерции скатываются по склону с меньшим ускорением, поскольку большая часть их потенциальной энергии должна быть преобразована в кинетическую энергию вращения.
Если механическая система вынуждена двигаться параллельно неподвижной плоскости, то вращение тела в системе происходит вокруг оси. параллельно этой плоскости. При этом момент инерции массы в этой системе представляет собой скаляр, известный как полярный момент инерции . Определение полярного момента инерции можно получить, рассматривая импульс, кинетическую энергию и законы Ньютона для плоского движения жесткой системы частиц. [15] [18] [25] [26]
Если система частицы, , собраны в твердое тело, то импульс системы можно записать через положения относительно опорной точки. , и абсолютные скорости : где - угловая скорость системы и это скорость .
При плоском движении вектор угловой скорости направлен вдоль единичного вектора которая перпендикулярна плоскости движения. Введем единичные векторы от контрольной точки в точку и единичный вектор , так
Это определяет вектор относительного положения и вектор скорости жесткой системы частиц, движущихся в плоскости.
Примечание о векторном произведении : когда тело движется параллельно базовой плоскости, траектории всех точек тела лежат в плоскостях, параллельных этой базовой плоскости. Это означает, что любое вращение, которому подвергается тело, должно происходить вокруг оси, перпендикулярной этой плоскости. Плоское движение часто представляется проецированным на эту плоскость земли, так что ось вращения выглядит как точка. В этом случае угловая скорость и угловое ускорение тела являются скалярами и тот факт, что они являются векторами вдоль оси вращения, игнорируется. Обычно это предпочтительнее для введения в тему. Но в случае момента инерции комбинация массы и геометрии выигрывает от геометрических свойств векторного произведения. По этой причине в этом разделе, посвященном плоскому движению, угловая скорость и ускорение тела представляют собой векторы, перпендикулярные плоскости земли, а операции векторного произведения такие же, как и для изучения пространственного движения твердого тела.
Вектор углового момента плоского движения твердой системы частиц определяется выражением [15] [18]
Используйте центр масс в качестве ориентира, так что
и определим момент инерции относительно центра масс как
тогда уравнение для углового момента упрощается до [23] : 1028
Момент инерции вокруг оси, перпендикулярной движению твердой системы и проходящей через центр масс, называется полярным моментом инерции . В частности, это второй момент массы относительно ортогонального расстояния от оси (или полюса).
При заданном угловом моменте уменьшение момента инерции приводит к увеличению угловой скорости. Фигуристы могут изменить момент инерции, потянув руки. Таким образом, угловая скорость, достигаемая фигуристом с вытянутыми руками, приводит к большей угловой скорости, когда руки втянуты, из-за уменьшенного момента инерции. Однако фигурист не является твердым телом.
В этих роторных ножницах 1906 года момент инерции двух маховиков используется для накопления кинетической энергии, которая при высвобождении используется для резки металлической заготовки (Международная технологическая библиотека, 1906 г.).
Кинетическая энергия жесткой системы частиц, движущихся в плоскости, определяется выражением [15] [18]
Пусть точкой отсчета будет центр масс системы, так что второй член становится равным нулю, и вводим момент инерции поэтому кинетическая энергия определяется выражением [23] : 1084
Трактор John Deere 1920-х годов со спицевым маховиком на двигателе. Большой момент инерции маховика сглаживает работу трактора.
Законы Ньютона для жесткой системы частицы, , можно записать через результирующую силу и крутящий момент в опорной точке. , чтобы дать [15] [18] где обозначает траекторию каждой частицы.
Кинематика твердого тела дает формулу ускорения частицы с точки зрения позиции и ускорение опорной частицы, а также вектора угловой скорости и вектор углового ускорения жесткой системы частиц как,
Для систем, вынужденных к плоскостному движению, векторы угловой скорости и углового ускорения направлены вдоль перпендикулярно плоскости движения, что упрощает это уравнение ускорения. В этом случае векторы ускорений можно упростить, введя единичные векторы от контрольной точки в точку и единичные векторы , так
Это дает результирующий крутящий момент системы как
где , и - единичный вектор, перпендикулярный плоскости для всех частиц .
Используйте центр масс в качестве контрольной точки и определите момент инерции относительно центра масс , то уравнение для результирующего крутящего момента упрощается до [23] : 1029
Движение в пространстве твердого тела и матрица инерции
Скалярные моменты инерции появляются как элементы матрицы, когда система частиц собирается в твердое тело, движущееся в трехмерном пространстве. Эта матрица инерции появляется при расчете углового момента, кинетической энергии и результирующего крутящего момента жесткой системы частиц. [4] [5] [6] [7] [27]
Пусть система частицы, находиться по координатам со скоростями относительно фиксированной системы отсчета. Для (возможно, движущейся) контрольной точки , относительные позиции а (абсолютные) скорости равны где - угловая скорость системы, а это скорость .
Матрица инерции строится путем рассмотрения углового момента с опорной точкой тела, выбранного в качестве центра масс : [4] [7] где термины, содержащие ( ) сумма равна нулю по определению центра масс .
Тогда кососимметричная матрица полученный из вектора относительного положения , может использоваться для определения, где определяется — симметричная матрица инерции жесткой системы частиц, измеренная относительно центра масс .
Кинетическая энергия жесткой системы частиц может быть сформулирована через центр масс и матрицу моментов инерции масс системы. Пусть система частицы находиться по координатам со скоростями , то кинетическая энергия [4] [7] где – вектор положения частицы относительно центра масс.
Это уравнение расширяется и дает три члена
Поскольку центр масс определяется формулой , второй член в этом уравнении равен нулю. Введем кососимметричную матрицу поэтому кинетическая энергия становится
Таким образом, кинетическая энергия жесткой системы частиц определяется выражением где – матрица инерции относительно центра масс и это общая масса.
Матрица инерции возникает при применении второго закона Ньютона к жесткому скоплению частиц. Результирующий крутящий момент в этой системе равен: [4] [7] где это ускорение частицы . Кинематика твердого тела дает формулу ускорения частицы с точки зрения позиции и ускорение точки отсчета, а также вектор угловой скорости и вектор углового ускорения жесткой системы, как,
Используйте центр масс в качестве точки отсчета и введем кососимметричную матрицу представлять перекрестное произведение , чтобы получить
В последнем заявлении потому что либо покоится, либо движется с постоянной скоростью, но не ускоряется, либо начало неподвижной (мировой) системы координат помещено в центр масс . Распределив векторное произведение на сумму, получим
Матрица инерции тела зависит от выбора точки отсчета. Существует полезная связь между матрицей инерции относительно центра масс. и матрица инерции относительно другой точки . Это соотношение называется теоремой о параллельности осей. [4] [7]
Рассмотрим матрицу инерции получено для жесткой системы частиц, измеренной относительно точки отсчета , заданный
Позволять — центр масс жесткой системы, тогда где вектор из центра масс до контрольной точки . Используйте это уравнение для вычисления матрицы инерции:
Распределите по векторному произведению, чтобы получить
Первое слагаемое представляет собой матрицу инерции относительно центра масс. Второе и третье члены равны нулю по определению центра масс. . И последнее слагаемое — это полная масса системы, умноженная на квадрат кососимметричной матрицы. построен из .
Результатом является теорема о параллельной оси: где вектор из центра масс до контрольной точки .
Обратите внимание на знак минус : при использовании кососимметричной матрицы векторов положения относительно опорной точки матрица инерции каждой частицы имеет вид , что аналогично которое проявляется в плоскостном движении. Однако, чтобы это работало правильно, необходим знак минус. Этот знак минуса можно включить в термин , при желании, используя свойство косой симметрии .
Скалярный момент инерции, , тела вокруг заданной оси, направление которой задается единичным вектором и проходит через тело в точке заключается в следующем: [7] где — матрица моментов инерции системы относительно опорной точки , и – кососимметричная матрица, полученная из вектора .
Это получается следующим образом. Пусть жесткая сборка частицы, , есть координаты . Выбирать в качестве контрольной точки и вычислите момент инерции вокруг линии L, определяемой единичным вектором через точку отсчета , . Вектор перпендикуляра от этой линии к частице получается из путем удаления компонента, который выступает на . где - единичная матрица, чтобы избежать путаницы с матрицей инерции, и - внешняя матрица продукта, сформированная из единичного вектора вдоль линии .
Чтобы связать этот скалярный момент инерции с матрицей инерции тела, введем кососимметричную матрицу такой, что , то мы имеем тождество отмечая, что является единичным вектором.
Квадрат величины перпендикулярного вектора равен
В упрощении этого уравнения используется тождество тройного скалярного произведения где точка и векторное произведение поменялись местами. Обмен продуктами и упрощение, отметив, что и ортогональны:
Таким образом, момент инерции вокруг линии через в направлении получается из расчета где — матрица моментов инерции системы относительно опорной точки .
Это показывает, что матрицу инерции можно использовать для расчета момента инерции тела вокруг любой заданной оси вращения тела.
Для одного и того же объекта разные оси вращения будут иметь разные моменты инерции относительно этих осей. В общем, моменты инерции не равны, если объект не симметричен относительно всех осей. момента инерции Тензор — удобный способ суммировать все моменты инерции объекта одной величиной. Его можно рассчитать относительно любой точки пространства, хотя для практических целей чаще всего используется центр масс.
Диагональные элементы более кратко записываются как
в то время как недиагональные элементы, также называемые продуктами инерции ,
Здесь обозначает момент инерции вокруг -ось, когда объекты вращаются вокруг оси X, обозначает момент инерции вокруг -ось, когда объекты вращаются вокруг -ось и так далее.
Эти величины можно обобщить на объект с распределенной массой, описываемой функцией плотности массы, аналогично скалярному моменту инерции. Тогда у человека есть
Тензор инерции можно использовать так же, как матрицу инерции, для вычисления скалярного момента инерции относительно произвольной оси в направлении ,
где скалярное произведение берется с соответствующими элементами в составных тензорах. Продукт инерции, такой как получается путем вычисления и может быть интерпретировано как момент инерции вокруг -ось, когда объект вращается вокруг -ось.
Компоненты тензоров второй степени можно собрать в матрицу. Для тензора инерции эта матрица имеет вид:
В механике твердого тела принято использовать обозначения, которые явно идентифицируют , , и -оси, например и , для компонент тензора инерции.
Существуют некоторые приложения CAD и CAE, такие как SolidWorks, Unigraphics NX/Siemens NX и MSC Adams, которые используют альтернативное соглашение для продуктов инерции. Согласно этому соглашению, знак минус удаляется из произведения формул инерции и вместо этого вставляется в матрицу инерции:
Определить соглашение инерции (метод главных осей)
Если у вас есть данные по инерции не зная, какое соглашение об инерции использовалось, можно определить, есть ли у вас также главные оси . При использовании метода главных осей матрицы инерции составляются на основе следующих двух предположений:
Использовалось стандартное соглашение об инерции. .
Было использовано соглашение об альтернативной инерции. .
Затем вычисляются собственные векторы для двух матриц. Матрица, собственные векторы которой параллельны главным осям, соответствует использованному соглашению об инерции.
Позволять — тензор инерции тела, рассчитанный в его центре масс , и – вектор перемещения тела. Тензор инерции перемещенного тела относительно исходного центра масс определяется выражением: где — масса тела, E 3 — единичная матрица 3 × 3, а это внешний продукт .
Использование матрицы инерции во втором законе Ньютона предполагает, что ее компоненты вычисляются относительно осей, параллельных инерциальной системе отсчета, а не относительно системы отсчета, закрепленной на теле. [7] [25] Это означает, что по мере движения тела компоненты матрицы инерции изменяются со временем. Напротив, компоненты матрицы инерции, измеренные в фиксированной системе координат, постоянны.
Обозначим матрицу инерции корпуса кузова относительно центра масс , и определим ориентацию корпуса тела относительно инерциальной системы координат матрицей вращения , такой, что, где векторы в фиксированной системе координат тела есть координаты в инерциальной системе отсчета. Тогда матрица инерции тела, измеренная в инерциальной системе отсчета, имеет вид
Обратите внимание, что изменяется при движении тела, а остается постоянным.
Матрица инерции, измеренная в корпусе тела, представляет собой постоянную вещественную симметричную матрицу. Действительная симметричная матрица имеет собственное разложение в произведение матрицы вращения. и диагональная матрица , заданный где
Столбцы матрицы вращения определяют направления главных осей тела, а константы , , и называются главными моментами инерции . Этот результат был впервые показан Дж. Дж. Сильвестром (1852) и является формой закона инерции Сильвестра . [29] [30] Главную ось с наибольшим моментом инерции иногда называют осью фигуры или осью фигуры .
Игрушечный волчок является примером вращающегося твердого тела, а слово волчок используется в названиях типов твердых тел. Когда все главные моменты инерции различны, главные оси, проходящие через центр масс, определяются однозначно, и твердое тело называется асимметричным волчком . Если два главных момента одинаковы, твердое тело называется симметричным волчком , и для двух соответствующих главных осей нет однозначного выбора. Если все три главных момента одинаковы, твердое тело называется сферическим верхом (хотя оно не обязательно должно быть сферическим), и любую ось можно считать главной осью, что означает, что момент инерции одинаков относительно любой оси.
Главные оси часто совпадают с осями симметрии объекта. Если твердое тело имеет ось симметрии порядка , что означает, что он симметричен при вращении на 360 ° / м вокруг данной оси, эта ось является главной осью. Когда , твердое тело представляет собой симметричный волчок. Если твердое тело имеет хотя бы две оси симметрии, не параллельные и не перпендикулярные друг другу, то это сферическая вершина, например, куб или любое другое платоново тело .
Движение , транспортных средств часто описывается с помощью рыскания, тангажа и крена которые обычно примерно соответствуют вращениям вокруг трех главных осей. Если автомобиль имеет двустороннюю симметрию, то одна из главных осей будет точно соответствовать поперечной (тангажной) оси.
Практическим примером этого математического явления является рутинная автомобильная задача по балансировке шины , которая по сути означает регулировку распределения массы автомобильного колеса таким образом, чтобы его главная ось инерции была совмещена с осью, чтобы колесо не раскачивалось.
Эллипсоид с полуглавными диаметрами, обозначенными , , и .
Матрица момента инерции в координатах тела-рамы представляет собой квадратичную форму, которая определяет поверхность тела, называемую эллипсоидом Пуансо . [31] Позволять — матрица инерции относительно центра масс, совмещенного с главными осями, тогда поверхность или определяет эллипсоид в корпусе тела. Запишите это уравнение в виде чтобы увидеть, что полуглавные диаметры этого эллипсоида определяются выражением
Пусть точка на этом эллипсоиде определяться с точки зрения его величины и направления, , где является единичным вектором. Тогда представленная выше связь между матрицей инерции и скалярным моментом инерции вокруг оси в направлении , дает
Таким образом, величина точки в направлении на эллипсоиде инерции
^ Холлидей, Дэвид; Резник, Роберт; Уокер, Джерл (2005). Основы физики (7-е изд.). Хобокен, Нью-Джерси: Уайли. ISBN 9780471216438 .
^ Французский, AP (1971). Вибрации и волны . Бока-Ратон, Флорида: CRC Press. ISBN 9780748744473 .
^ Jump up to: а б с д и ж Уикер, Джон Дж.; Пеннок, Гордон Р.; Шигли, Джозеф Э. (2010). Теория машин и механизмов (4-е изд.). Издательство Оксфордского университета. ISBN 978-0195371239 .
^ Грейси, Уильям, Экспериментальное определение моментов инерции самолетов с помощью упрощенного метода составного маятника, Техническая записка NACA № 1629 , 1948 г.
^ Морроу, HW; Кокернак, Роберт (2011). Статика и сопротивление материалов (7-е изд.). Нью-Джерси: Прентис Холл. стр. 192–196. ISBN 978-0135034521 .
^ В этой ситуации этот момент инерции описывает только то, как крутящий момент, приложенный вдоль этой оси, вызывает вращение вокруг этой оси. Но крутящие моменты, не выровненные вдоль главной оси, также будут вызывать вращения вокруг других осей.
Arc.Ask3.Ru Номер скриншота №: 201acc1995056c80c7a287ba3d08f693__1720103640 URL1:https://arc.ask3.ru/arc/aa/20/93/201acc1995056c80c7a287ba3d08f693.html Заголовок, (Title) документа по адресу, URL1: Moment of inertia - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)







































































![{\displaystyle {\begin{aligned}I_{C,{\text{sphere}}}&=\int _{-R}^{R}{\tfrac {1}{2}}\pi \rho r( z)^{4}\,dz=\int _{-R}^{R}{\tfrac {1}{2}}\pi \rho \left(R^{2}-z^{2}\ right)^{2}\,dz\\[1ex]&={\tfrac {1}{2}}\pi \rho \left[R^{4}z-{\tfrac {2}{3}} R^{2}z^{3}+{\tfrac {1}{5}}z^{5}\right]_{-R}^{R}\\[1ex]&=\pi \rho \ left(1-{\tfrac {2}{3}}+{\tfrac {1}{5}}\right)R^{5}\\[1ex]&={\tfrac {2}{5}} mR^{2},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c113f6f3a943142103436b3636511e8961e9c369)




































![{\displaystyle \left[\mathbf {b} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2ce9643510bd433e0ed612edd5d3a9ed7faecfec)

![{\displaystyle {\begin{aligned}\mathbf{b}\times\mathbf{y} &\equiv\left[\mathbf{b}\right]\mathbf{y}\\\left[\mathbf{b} \right]&\equiv {\begin{bmatrix}0&-b_{z}&b_{y}\\b_{z}&0&-b_{x}\\-b_{y}&b_{x}&0\end{bmatrix }}.\end{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4782eb664e98a6d680dd96b77601ff9bc12ab4a)


![{\displaystyle [\Delta \mathbf {r} _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ee5960e77611f673ab2f2050f356dbf0e403132)

![{\displaystyle \mathbf {L} =\left(-\sum _{i=1}^{n}m_{i}\left[\Delta \mathbf {r} _{i}\right]^{2} \right){\boldsymbol {\omega }}=\mathbf {I} _ {\mathbf {C} }{\boldsymbol {\omega }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/26ff4f4ab9aa3fff11085b8828fc71a4af7de700)

![{\ displaystyle \ mathbf {I} _ {\ mathbf {C} } = - \ sum _ {i = 1} ^ {n} m_ {i} \ left [\ Delta \ mathbf {r} _ {i} \ right ]^{2},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6766e8a9ce07ff8f32ec86aaa929f1e5a3ce1a21)



![{\displaystyle {\begin{aligned}E_{\text{K}}&={\frac {1}{2}}\left(\sum _{i=1}^{n}m_{i}\left (\left[\Delta \mathbf {r} _{i}\right]{\boldsymbol {\omega }}\right)\cdot \left(\left[\Delta \mathbf {r} _{i}\right ]{\boldsymbol {\omega }}\right)\right)+{\frac {1}{2}}\left(\sum _{i=1}^{n}m_{i}\right)\mathbf {V} _{\mathbf {C} }\cdot \mathbf {V} _{\mathbf {C} }\\&={\frac {1}{2}}\left(\sum _{i=1 }^{n}m_{i}\left({\boldsymbol {\omega }}^{\mathsf {T}}\left[\Delta \mathbf {r} _{i}\right]^{\mathsf { T}}\left[\Delta \mathbf {r} _{i}\right]{\boldsymbol {\omega }}\right)\right)+{\frac {1}{2}}\left(\sum _{i=1}^{n}m_{i}\right)\mathbf {V} _{\mathbf {C} }\cdot \mathbf {V} _{\mathbf {C} }\\&={ \frac {1}{2}}{\boldsymbol {\omega }}\cdot \left(-\sum _{i=1}^{n}m_{i}\left[\Delta \mathbf {r} _ {i}\right]^{2}\right){\boldsymbol {\omega }}+{\frac {1}{2}}\left(\sum _{i=1}^{n}m_{i }\right)\mathbf {V} _{\mathbf {C} }\cdot \mathbf {V} _ {\mathbf {C} }.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c246c5646e149b67a600084c164f154ec7dda89)






![{\displaystyle \left[\Delta \mathbf {r} _{i}\right]=\left[\mathbf {r} _{i}-\mathbf {C} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b83ab9af0efe0f59204a493b10b5eb453594c19)

![{\displaystyle {\boldsymbol {\tau }}=\left(-\sum _{i=1}^{n}m_{i}\left[\Delta \mathbf {r} _{i}\right]^ {2}\right){\boldsymbol {\alpha }}+{\boldsymbol {\omega }}\times \left(-\sum _{i=1}^{n}m_{i}\left[\Delta \mathbf {r} _{i}\right]^{2}\right){\boldsymbol {\omega }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b93d7ec560fb15fbaaba36a2fd0869da807fd92e)

![{\displaystyle {\begin{aligned}{\boldsymbol {\tau }}&=\sum _{i=1}^{n}(\mathbf {r_{i}} -\mathbf {R})\times ( m_{i}\mathbf {a} _{i})\\&=\sum _{i=1}^{n}\Delta \mathbf {r} _{i}\times (m_{i}\mathbf {a} _{i})\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times \mathbf {a} _{i }]\;\ldots {\text{ скалярное умножение перекрестного произведения}}\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\ раз (\mathbf {a} _{{\text{тангенциальный}},i}+\mathbf {a} _{{\text{центростремительный}},i}+\mathbf {A} _{\mathbf {R} })]\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\mathbf {a} _{{\text{тангенциальный }},i}+\mathbf {a} _{{\text{центростремительный}},i}+0)]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e8f0c3e85512d4f04a615d04c2c28e855fbf2120)

![{\displaystyle {\begin{aligned}{\boldsymbol {\tau }}&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times \ mathbf {a} _ {{\text{тангенциальный}},i}+\Delta \mathbf {r} _{i}\times \mathbf {a} _{{\text{центростремительный}},i}]\\ {\boldsymbol {\tau }}&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\ times \Delta \mathbf {r} _{i})+\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times \mathbf {v} _{{\text{тангенциальный) }},i})]\\{\boldsymbol {\tau }}&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ( {\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\ жирный символ {\omega }}\times \Delta \mathbf {r} _{i}))]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/92a8c5e71419b6391fce82b173f4ca48bf2896af)
![{\displaystyle {\begin{aligned}0&=\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))+{\boldsymbol {\omega }}\times (({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times \Delta \mathbf {r} _{i})+({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times (\Delta \mathbf {r} _{i}\times {\ жирный символ {\omega }})\\&=\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))+{\boldsymbol {\omega }}\times (({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times \Delta \mathbf {r} _{i})+({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times -({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\;\ldots {\text{антикоммутативность перекрестного произведения}}\\&=\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))+{\boldsymbol {\omega }}\times (({\boldsymbol {\omega }}\times \Delta \ mathbf {r} _{i})\times \Delta \mathbf {r} _{i})+-[({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\ times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})]\;\ldots {\text{ скалярное умножение перекрестного произведения}}\\&=\Delta \mathbf {r } _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))+{\boldsymbol {\omega } }\times (({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times \Delta \mathbf {r} _{i})+-[0]\;\ldots {\text{самоперекрестное произведение}}\\0&=\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \ Дельта \mathbf {r} _{i}))+{\boldsymbol {\omega }}\times (({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times \ Дельта \mathbf {r} _{i})\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1faaf09eaed98f82dc96bf237ef4bdd7921d0f88)
![{\displaystyle {\begin{aligned}\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r } _{i}))&=-[{\boldsymbol {\omega }}\times (({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})\times \Delta \ mathbf {r} _{i})]\\&=-[({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}({\boldsymbol {\omega }}\cdot ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))]\;\ldots {\text{векторное тройное произведение}}\\&=-[({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i })({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\ cdot ({\boldsymbol {\omega }}\times {\boldsymbol {\omega }}))]\;\ldots {\text{ скалярное тройное произведение}}\\&=-[({\boldsymbol {\omega } }\times \Delta \mathbf {r} _{i})({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i} (\Delta \mathbf {r} _{i}\cdot (0))]\;\ldots {\text{взаимное произведение}}\\&=-[({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i})({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _{i})]\\&=-[{\boldsymbol {\omega }} \times (\Delta \mathbf {r} _{i}({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _{i}))]\;\ldots {\text{ перекрестное произведение скалярное умножение}}\\&={\boldsymbol {\omega }}\times -(\Delta \mathbf {r} _{i}({\boldsymbol {\omega }}\cdot \Delta \mathbf {r} _ {i}))\;\ldots {\text{скалярное умножение перекрестного произведения}}\\\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r} _{i}))&= {\boldsymbol {\omega }}\times -(\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\omega }}))\;\ldots {\text{ коммутативность скалярного произведения}}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64290822854e10ddee72f763b816c319e88c257a)
![{\displaystyle {\begin{aligned}{\boldsymbol {\tau }}&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ( {\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times ({\ жирный символ {\omega }}\times \Delta \mathbf {r} _{i}))]\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times -(\Delta \mathbf {r} _ {i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\omega }}))]\\&=\sum _{i=1}^{n}m_{i}[\ Дельта \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times \{0- \Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\omega }})\}]\\&=\sum _{i=1}^ {n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\ omega }}\times \{[{\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})-{\boldsymbol {\omega } }(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})]-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{ i}\cdot {\boldsymbol {\omega }})\}]\;\ldots \;{\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r } _{i})-{\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})=0\\&=\sum _ {i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i}) +{\boldsymbol {\omega }}\times \{[{\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})-\ Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\omega }})]-{\boldsymbol {\omega }}(\Delta \mathbf {r } _{i}\cdot \Delta \mathbf {r} _{i})\}]\;\ldots {\text{ассоциативность сложения}}\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/870182ea378ff573ef3abb446dfb868374252fd2)
![{\displaystyle {\begin{aligned}{\boldsymbol {\tau }}&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ( {\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times \{{\boldsymbol {\omega }}(\Delta \mathbf {r } _{i}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\ omega }})\}-{\boldsymbol {\omega }}\times {\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i} )]\;\ldots {\text{распределение перекрестного произведения по сложению}}\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i} \times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times \{{\boldsymbol {\omega }}(\Delta \ mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\ жирный символ {\omega }})\}-(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})({\boldsymbol {\omega }}\times {\boldsymbol {\omega }})]\;\ldots {\text{ скалярное умножение перекрестного произведения}}\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times \{{\boldsymbol {\omega }} (\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i} \cdot {\boldsymbol {\omega }})\}-(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})(0)]\;\ldots {\ text{ перекрестное произведение самого себя}}\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha } }\times \Delta \mathbf {r} _{i})+{\boldsymbol {\omega }}\times \{{\boldsymbol {\omega }}(\Delta \mathbf {r} _{i}\cdot \Delta \mathbf {r} _{i})-\Delta \mathbf {r} _{i}(\Delta \mathbf {r} _{i}\cdot {\boldsymbol {\omega }})\}] \\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times ({\boldsymbol {\alpha }}\times \Delta \mathbf { r} _{i})+{\boldsymbol {\omega }}\times \{\Delta \mathbf {r} _{i}\times ({\boldsymbol {\omega }}\times \Delta \mathbf {r } _{i})\}]\;\ldots {\text{векторное тройное произведение}}\\&=\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times -(\Delta \mathbf {r} _{i}\times {\boldsymbol {\alpha }})+{\boldsymbol {\omega }}\times \{\Delta \mathbf {r} _{i}\times -(\Delta \mathbf {r} _{i}\times {\boldsymbol {\omega }})\}]\;\ldots {\text{анткоммутативность перекрестного произведения}}\\& =-\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol { \alpha }})+{\boldsymbol {\omega }}\times \{\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\ omega }})\}]\;\ldots {\text{ скалярное умножение перекрестного произведения}}\\&=-\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r } _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\alpha }})]+-\sum _{i=1}^{n}m_{i}[ {\boldsymbol {\omega }}\times \{\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\omega }})\} ]\;\ldots {\text{распределение суммирования}}\\{\boldsymbol {\tau }}&=-\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\alpha }})]+{\boldsymbol {\omega }}\times -\sum _{i=1} ^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\omega }})]\;\ldots \;{\boldsymbol {\omega }}{\text{ не характерно для частицы }}P_{i}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85585a7db797b2d9747d752c2c5b54578da2dd71)

![{\displaystyle {\begin{aligned}-\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{ i}\times \mathbf {u} )]&=-\sum _{i=1}^{n}m_{i}\left({\begin{bmatrix}0&-\Delta r_{3,i}& \Delta r_{2,i}\\\Delta r_{3,i}&0&-\Delta r_{1,i}\\-\Delta r_{2,i}&\Delta r_{1,i}&0\ end{bmatrix}}\left({\begin{bmatrix}0&-\Delta r_{3,i}&\Delta r_{2,i}\\\Delta r_{3,i}&0&-\Delta r_{1 ,i}\\-\Delta r_{2,i}&\Delta r_{1,i}&0\end{bmatrix}}{\begin{bmatrix}u_{1}\\u_{2}\\u_{ 3}\end{bmatrix}}\right)\right)\;\ldots {\text{ перекрестное произведение как умножение матрицы}}\\[6pt]&=-\sum _{i=1}^{n} m_{i}\left({\begin{bmatrix}0&-\Delta r_{3,i}&\Delta r_{2,i}\\\Delta r_{3,i}&0&-\Delta r_{1, i}\\-\Delta r_{2,i}&\Delta r_{1,i}&0\end{bmatrix}}{\begin{bmatrix}-\Delta r_{3,i}\,u_{2} +\Delta r_{2,i}\,u_{3}\\+\Delta r_{3,i}\,u_{1}-\Delta r_{1,i}\,u_{3}\\- \Delta r_{2,i}\,u_{1}+\Delta r_{1,i}\,u_{2}\end{bmatrix}}\right)\\[6pt]&=-\sum _{ i=1}^{n}m_{i}{\begin{bmatrix}-\Delta r_{3,i}(+\Delta r_{3,i}\,u_{1}-\Delta r_{1, i}\,u_{3})+\Delta r_{2,i}(-\Delta r_{2,i}\,u_{1}+\Delta r_{1,i}\,u_{2}) \\+\Delta r_{3,i}(-\Delta r_{3,i}\,u_{2}+\Delta r_{2,i}\,u_{3})-\Delta r_{1, i}(-\Delta r_{2,i}\,u_{1}+\Delta r_{1,i}\,u_{2})\\-\Delta r_{2,i}(-\Delta r_ {3,i}\,u_{2}+\Delta r_{2,i}\,u_{3})+\Delta r_{1,i}(+\Delta r_{3,i}\,u_{ 1}-\Delta r_{1,i}\,u_{3})\end{bmatrix}}\\[6pt]&=-\sum _{i=1}^{n}m_{i}{\ Begin{bmatrix}-\Delta r_{3,i}^{2}\,u_{1}+\Delta r_{1,i}\Delta r_{3,i}\,u_{3}-\Delta r_ {2,i}^{2}\,u_{1}+\Delta r_{1,i}\Delta r_{2,i}\,u_{2}\\-\Delta r_{3,i}^ {2}\,u_{2}+\Delta r_{2,i}\Delta r_{3,i}\,u_{3}+\Delta r_{2,i}\Delta r_{1,i}\ ,u_{1}-\Delta r_{1,i}^{2}\,u_{2}\\+\Delta r_{3,i}\Delta r_{2,i}\,u_{2}- \Delta r_{2,i}^{2}\,u_{3}+\Delta r_{3,i}\Delta r_{1,i}\,u_{1}-\Delta r_{1,i} ^{2}\,u_{3}\end{bmatrix}}\\[6pt]&=-\sum _{i=1}^{n}m_{i}{\begin{bmatrix}-(\Delta r_{2,i}^{2}+\Delta r_{3,i}^{2})\,u_{1}+\Delta r_{1,i}\Delta r_{2,i}\,u_ {2}+\Delta r_{1,i}\Delta r_{3,i}\,u_{3}\\+\Delta r_{2,i}\Delta r_{1,i}\,u_{1 }-(\Delta r_{1,i}^{2}+\Delta r_{3,i}^{2})\,u_{2}+\Delta r_{2,i}\Delta r_{3, i}\,u_{3}\\+\Delta r_{3,i}\Delta r_{1,i}\,u_{1}+\Delta r_{3,i}\Delta r_{2,i} \,u_{2}-(\Delta r_{1,i}^{2}+\Delta r_{2,i}^{2})\,u_{3}\end{bmatrix}}\\[6pt ]&=-\sum _{i=1}^{n}m_{i}{\begin{bmatrix}-(\Delta r_{2,i}^{2}+\Delta r_{3,i}^ {2})&\Delta r_{1,i}\Delta r_{2,i}&\Delta r_{1,i}\Delta r_{3,i}\\\Delta r_{2,i}\Delta r_{1,i}&-(\Delta r_{1,i}^{2}+\Delta r_{3,i}^{2})&\Delta r_{2,i}\Delta r_{3, i}\\\Delta r_{3,i}\Delta r_{1,i}&\Delta r_{3,i}\Delta r_{2,i}&-(\Delta r_{1,i}^{ 2}+\Delta r_{2,i}^{2})\end{bmatrix}}{\begin{bmatrix}u_{1}\\u_{2}\\u_{3}\end{bmatrix}} \\&=-\sum _{i=1}^{n}m_{i}[\Delta r_{i}]^{2}\mathbf {u} \\[6pt]-\sum _{i= 1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times \mathbf {u} )]&=\left( -\sum _{i=1}^{n}m_{i}[\Delta r_{i}]^{2}\right)\mathbf {u} \;\ldots \;\mathbf {u} {\ text{ не характерно для }}P_{i}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef0bb9597377649b0d39c7b8e75fa2f880df2e23)
![{\displaystyle {\begin{aligned}{\boldsymbol {\tau }}&=-\sum _{i=1}^{n}m_{i}[\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\alpha }})]+{\boldsymbol {\omega }}\times -\sum _{i=1}^{n}m_{ i}\Delta \mathbf {r} _{i}\times (\Delta \mathbf {r} _{i}\times {\boldsymbol {\omega }})]\\&=\left(-\sum _ {i=1}^{n}m_{i}[\Delta r_{i}]^{2}\right){\boldsymbol {\alpha }}+{\boldsymbol {\omega }}\times \left( -\sum _{i=1}^{n}m_{i}[\Delta r_{i}]^{2}\right){\boldsymbol {\omega }}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/24eed2971eccd0e0b63f32600e1d3fc6254dca49)


![{\displaystyle \mathbf {I} _ {\mathbf {R} } = - \ sum _ {i = 1} ^ {n} m_ {i} \ left [\ mathbf {r} _ {i} - \ mathbf { R} \right]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/93e62233b3acff4fc919fc24e8d6241551543087)


![{\ displaystyle \ mathbf {I} _ {\ mathbf {R} } = - \ sum _ {i = 1} ^ {n} m_ {i} [\ mathbf {r} _ {i} - \ left (\ mathbf {C} +\mathbf {d} \right)]^{2}=-\sum _{i=1}^{n}m_{i}[\left(\mathbf {r}_{i}-\ mathbf {C} \right)-\mathbf {d} ]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0063409d605348215928372e62f294287f06fb98)
![{\ displaystyle \ mathbf {I} _ {\ mathbf {R} } = - \ left (\ sum _ {i = 1} ^ {n} m_ {i} [\ mathbf {r} _ {i} - \ mathbf {C} ]^{2}\right)+\left(\sum _{i=1}^{n}m_{i}[\mathbf {r}_{i}-\mathbf {C} ]\right )[\mathbf {d} ]+[\mathbf {d} ]\left(\sum _{i=1}^{n}m_{i}[\mathbf {r}_{i}-\mathbf {C } ]\right)-\left(\sum _{i=1}^{n}m_{i}\right)[\mathbf {d} ]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/68eee7fefe0e716823fd5d80384303b8aef58b99)
![{\displaystyle [\mathbf {d} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5785dcf9605fb6ace7c1a8c8b4d6b365af48366)
![{\ displaystyle \ mathbf {I} _ {\ mathbf {R} } = \ mathbf {I} _ {\ mathbf {C}} -M [\ mathbf {d} ] ^ {2},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1c59b0848c4b1d69fff75c4257005225cd42c74d)
![{\displaystyle -m\left[\mathbf {r} \right]^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6b3ed54432828b43d6ae23e9a2e9c009c7336024)
![{\displaystyle m\left[\mathbf {r} \right]^{\mathsf {T}}\left[\mathbf {r} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/27fed5e06e85cd3d74847c333b7a32cbd6a31fe7)
![{\displaystyle [\mathbf {r} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba4c4e0b7a62e35392117d1331b60c9e3276b5c9)

![{\displaystyle I_{L}=\mathbf {\hat {k}} \cdot \left(-\sum _{i=1}^{N}m_{i}\left[\Delta \mathbf {r}_ {i}\right]^{2}\right)\mathbf {\hat {k}} =\mathbf {\hat {k}} \cdot \mathbf {I}_ {\mathbf {R} }\mathbf { \hat {k}} =\mathbf {\hat {k}} ^{\mathsf {T}} \mathbf {I}_ {\mathbf {R} }\mathbf {\hat {k}} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78bb7c062959fd615347939341b32bf66de221c6)





![{\displaystyle \left[\mathbf {\hat {k}} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a515c7495954477be07dee4f29d4c4c4ec50cf98)
![{\displaystyle \left[\mathbf {\hat {k}} \right]\mathbf {y} =\mathbf {\hat {k}} \times \mathbf {y} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/10d1281a399f50084c4d71e516f5d56b1cf5426f)
![{\displaystyle -\left[\mathbf {\hat {k}} \right]^{2} \equiv \left|\mathbf {\hat {k}} \right|^{2}\left(\mathbf { E} -\mathbf {\hat {k}} \mathbf {\hat {k}} ^{\mathsf {T}}\right)=\mathbf {E} -\mathbf {\hat {k}} \mathbf {\hat {k}} ^{\mathsf {T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d92be0b3adbb50fbe61b31dc0237f0fc102476a0)
![{\displaystyle {\begin{aligned}\left|\Delta \mathbf {r} _{i}^{\perp }\right|^{2} &=\left(-\left[\mathbf {\hat { k}} \right]^{2}\Delta \mathbf {r} _{i}\right)\cdot \left(-\left[\mathbf {\hat {k}} \right]^{2}\ Дельта \mathbf {r} _{i}\right)\\&=\left(\mathbf {\hat {k}} \times \left(\mathbf {\hat {k}} \times \Delta \mathbf { r} _{i}\right)\right)\cdot \left(\mathbf {\hat {k}} \times \left(\mathbf {\hat {k}} \times \Delta \mathbf {r} _ {i}\right)\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9d205a6da935ecfa8f5e13feb1a930f1d032022a)

![{\displaystyle {\begin{aligned}&\left(\mathbf {\hat {k}} \times \left(\mathbf {\hat {k}}) \times \Delta \mathbf {r}_{i} \ вправо) \ вправо) \cdot \left(\mathbf {\hat {k}} \times \left(\mathbf {\hat {k}} \times \Delta \mathbf {r}_{i}\right) \ right)\={}&\left(\left(\mathbf {\hat {k}} \times \left(\mathbf {\hat {k}} \times \Delta \mathbf {r}_{i} \right)\right)\times \mathbf {\hat {k}} \right)\cdot \left(\mathbf {\hat {k}} \times \Delta \mathbf {r}_{i}\right) \={}&\left(\mathbf {\hat {k}} \times \Delta \mathbf {r}_{i}\right)\cdot \left(-\Delta \mathbf {r}_{i } \times \mathbf {\hat {k}} \right)\\={}&-\mathbf {\hat {k}} \cdot \left(\Delta \mathbf {r}_{i}\times \ Delta \mathbf {r}_{i}\times \mathbf {\hat {k}} \right)\={}&-\mathbf {\hat {k}} \cdot \left[\Delta \mathbf { r} _{i}\right]^{2}\mathbf {\hat {k}} .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62111ff66a6922e2705a7eb60478088077b7d9bf)
![{\displaystyle {\begin{aligned}I_{L}&=\sum _{i=1}^{N}m_{i}\left|\Delta \mathbf {r}_{i}^{\perp } \right|^{2}\\&=-\sum _{i=1}^{N}m_{i}\mathbf {\hat {k}} \cdot \left[\Delta \mathbf {r}_ {i}\right]^{2}\mathbf {\hat {k}} =\mathbf {\hat {k}} \cdot \left(-\sum _{i=1}^{N}m_{i }\left[\Delta \mathbf {r}_{i}\right]^{2}\right)\mathbf {\hat {k}} \\&=\mathbf {\hat {k}} \cdot \ mathbf {I}_{\mathbf {R} }\mathbf {\hat {k}} =\mathbf {\hat {k}} ^{\mathsf {T}}\mathbf {I}_{\mathbf {R } }\mathbf {\hat {k}} ,\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f4a4a61db87467a4b76294e68bba221a2810cdf)













![{\displaystyle [\mathbf {r} ]\mathbf {x} =\mathbf {r} \times \mathbf {x} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/0f32ba1c18fa5966e4dcd2275a7f7e3bc21f6dc0)
![{\displaystyle \mathbf {I} =\iiint _{V}\rho (\mathbf {r})[\mathbf {r}]^{\textsf {T}}[\mathbf {r} ]\,dV= -\iiint _{Q}\rho (\mathbf {r})[\mathbf {r} ]^{2}\,dV}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f468dc8f2e4246bf78b1916390083f90998be5c)




![{\displaystyle \mathbf {I} ={\begin{bmatrix}I_{11}&I_{12}&I_{13}\\[1.8ex]I_{21}&I_{22}&I_{23}\\[1.8ex ]I_{31}&I_{32}&I_{33}\end{bmatrix}}={\begin{bmatrix}I_{xx}&I_{xy}&I_{xz}\\[1.8ex]I_{yx}&I_{ yy}&I_{yz}\\[1.8ex]I_{zx}&I_{zy}&I_{zz}\end{bmatrix}}={\begin{bmatrix}\sum _{k=1}^{N}m_ {k}\left(y_{k}^{2}+z_{k}^{2}\right)&-\sum _{k=1}^{N}m_{k}x_{k}y_{ k}&-\sum _{k=1}^{N}m_{k}x_{k}z_{k}\\[1ex]-\sum _{k=1}^{N}m_{k} x_{k}y_{k}&\sum _{k=1}^{N}m_{k}\left(x_{k}^{2}+z_{k}^{2}\right)&- \sum _{k=1}^{N}m_{k}y_{k}z_{k}\\[1ex]-\sum _{k=1}^{N}m_{k}x_{k} z_{k}&-\sum _{k=1}^{N}m_{k}y_{k}z_{k}&\sum _{k=1}^{N}m_{k}\left( x_{k}^{2}+y_{k}^{2}\right)\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/300757855c441dbf4e1e9d36f1cd88dad29e5e8a)
![{\displaystyle {\begin{aligned}I_{xy}=I_{yx}\ &{\stackrel {\mathrm {def} }{=}}\ \sum _{k=1}^{N}m_{k }x_{k}y_{k},\\I_{xz}=I_{zx}\ &{\stackrel {\mathrm {def} }{=}}\ \sum _{k=1}^{N} m_{k}x_{k}z_{k},\\I_{yz}=I_{zy}\ &{\stackrel {\mathrm {def} }{=}}\ \sum _{k=1}^ {N}m_{k}y_{k}z_{k},\\[3pt]\mathbf {I} ={\begin{bmatrix}I_{11}&I_{12}&I_{13}\\[1.8ex ]I_{21}&I_{22}&I_{23}\\[1.8ex]I_{31}&I_{32}&I_{33}\end{bmatrix}}&={\begin{bmatrix}I_{xx}& -I_{xy}&-I_{xz}\\[1.8ex]-I_{yx}&I_{yy}&-I_{yz}\\[1.8ex]-I_{zx}&-I_{zy}&I_ {zz}\end{bmatrix}}={\begin{bmatrix}\sum _{k=1}^{N}m_{k}\left(y_{k}^{2}+z_{k}^{ 2}\right)&-\sum _{k=1}^{N}m_{k}x_{k}y_{k}&-\sum _{k=1}^{N}m_{k}x_ {k}z_{k}\\[1ex]-\sum _{k=1}^{N}m_{k}x_{k}y_{k}&\sum _{k=1}^{N} m_{k}\left(x_{k}^{2}+z_{k}^{2}\right)&-\sum _{k=1}^{N}m_{k}y_{k}z_ {k}\\[1ex]-\sum _{k=1}^{N}m_{k}x_{k}z_{k}&-\sum _{k=1}^{N}m_{k }y_{k}z_{k}&\sum _{k=1}^{N}m_{k}\left(x_{k}^{2}+y_{k}^{2}\right)\ конец{bmatrix}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78eb9b0b4686b23e51350e74bb24511fce107f93)








![{\displaystyle I=m{\begin{bmatrix}n_{1}&n_{2}&n_{3}\end{bmatrix}}{\begin{bmatrix}y^{2}+z^{2}&-xy& -xz\\[0.5ex]-yx&x^{2}+z^{2}&-yz\\[0.5ex]-zx&-zy&x^{2}+y^{2}\end{bmatrix}}{ \begin{bmatrix}n_{1}\\[0.7ex]n_{2}\\[0.7ex]n_{3}\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dfb30784bc5347a3bef70bf77ea6413725e1d4d7)

![{\displaystyle \mathbf {I} =\mathbf {I} _{0}+m [(\mathbf {R} \cdot \mathbf {R})\mathbf {E} _{3}-\mathbf {R} \otimes \mathbf {R} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22568fa28674e243955b8fdddced7496b8e6487d)


























