Керл (математика)

| Часть серии статей о |
| Исчисление |
|---|

В исчислении ротор векторном , также известный как ротор , представляет собой векторный оператор , описывающий бесконечно малую циркуляцию векторного поля в трехмерном евклидовом пространстве . Вихрь в точке поля представлен вектором , длина и направление которого обозначают величину и ось максимальной циркуляции. [1] Ротор поля формально определяется как плотность циркуляции в каждой точке поля.
Векторное поле, ротор которого равен нулю, называется безвихревым . Ротор — это форма дифференцирования векторных полей. Соответствующей формой фундаментальной теоремы исчисления является теорема Стокса , которая связывает поверхностный интеграл ротора векторного поля с линейным интегралом векторного поля вокруг граничной кривой.
Обозначение локон F более распространено в Северной Америке. В остальном мире, особенно в научной литературе 20-го века, традиционно используется альтернативное обозначение rot F , которое происходит от «скорости вращения», которую оно представляет. Чтобы избежать путаницы, современные авторы склонны использовать обозначение векторного произведения с оператором del (набла), как в , [2] что также раскрывает связь между ротора (ротора), дивергенции и градиента операторами .

В отличие от градиента и дивергенции , ротор, сформулированный в векторном исчислении, не распространяется просто на другие измерения; возможны некоторые обобщения , но только в трех измерениях геометрически определенный ротор векторного поля снова является векторным полем. Этот недостаток является прямым следствием ограничений векторного исчисления; с другой стороны, когда выражается как антисимметричное тензорное поле через оператор клина геометрического исчисления , ротор обобщается на все измерения. Обстоятельство аналогично тому, что имеет место при 3-мерном векторном произведении , и действительно связь отражена в обозначениях для завитка.

Название «завиток» впервые предложил Джеймс Клерк Максвелл в 1871 году. [3] при построении теории оптического поля но эта концепция, по-видимому, впервые была использована Джеймсом МакКаллагом в 1839 году. [4] [5]
Определение
[ редактировать ]




Ротор векторного поля F , обозначаемый ротором F , или или rot F — оператор, отображающий C к функции в R 3 до С к -1 функции в R 3 , и, в частности, отображает непрерывно дифференцируемые функции R 3 → Р 3 к непрерывным функциям R 3 → Р 3 . Его можно определить несколькими способами, которые будут упомянуты ниже:
Один из способов определить ротор векторного поля в точке — неявно через его компоненты вдоль различных осей, проходящих через точку: если - любой единичный вектор, компонент ротора F в направлении можно определить как предельное значение интеграла по замкнутой линии в плоскости, перпендикулярной делится на охватываемую площадь, поскольку путь интегрирования бесконечно сжимается вокруг точки.

Более конкретно, ротор определяется в точке p как [6] [7] где линейный интеграл вычисляется вдоль границы C области рассматриваемой A , | А | является величиной площади. Это уравнение определяет компоненту ротора F вдоль направления . Бесконечно малые поверхности, ограниченные C, имеют как обычно . C ориентирован по правилу правой руки .

Приведенная выше формула означает, что составляющая ротора векторного поля вдоль определенной оси представляет собой бесконечно малую плотность площади циркуляции поля в плоскости, перпендикулярной этой оси. не Эта формула априори определяет законного векторного поля, поскольку отдельные плотности циркуляции по отношению к различным осям априори не обязательно должны относиться друг к другу так же, как компоненты вектора; то, что они действительно относятся друг к другу именно таким образом, должно быть доказано отдельно.
К этому определению естественным образом подходит теорема Кельвина–Стокса как глобальная формула, соответствующая определению. Он приравнивает поверхностный интеграл ротора векторного поля к указанному выше линейному интегралу, взятому вокруг границы поверхности.
Другой способ определить вектор ротора функции F в точке - это явное значение векторного поверхностного интеграла вокруг оболочки, охватывающей p, деленное на объем, заключенный в ней, поскольку оболочка бесконечно сжимается вокруг p .
Более конкретно, ротор может быть определен векторной формулой где поверхностный интеграл вычисляется вдоль границы S объема V , | В | являющийся величиной объема, и направленный наружу от поверхности S перпендикулярно в каждой точке S .

В этой формуле векторное произведение в подынтегральном выражении измеряет тангенциальную составляющую F поверхности S и указывает вдоль поверхности под прямым углом к тангенциальной проекции F в каждой точке . Интегрирование этого векторного произведения по всей поверхности дает вектор, величина которого измеряет общую циркуляцию F вокруг S и направление которой перпендикулярно этой циркуляции. Приведенная выше формула говорит, что ротор векторного поля в точке — это бесконечно малая объемная плотность этого «вектора циркуляции» вокруг точки.
К этому определению естественным образом подходит другая глобальная формула (аналогичная теореме Кельвина-Стокса), которая приравнивает объемный интеграл ротора векторного поля к вышеуказанному поверхностному интегралу, взятому по границе объема.
В то время как два приведенных выше определения ротора не содержат координат, существует еще одно «легкое для запоминания» определение ротора в криволинейных ортогональных координатах , например, в декартовых , сферических , цилиндрических или даже эллиптических или параболических координатах :
![{\displaystyle {\begin{aligned}&(\operatorname {curl} \mathbf {F})_{1}={\frac {1}{h_{2}h_{3}}}\left({\frac {\partial (h_{3}F_{3})}{\partial u_{2}}}-{\frac {\partial (h_{2}F_{2})}{\partial u_{3}}} \right),\\[5pt]&(\operatorname {curl} \mathbf {F} )_{2}={\frac {1}{h_{3}h_{1}}}\left({\frac {\partial (h_{1}F_{1})}{\partial u_{3}}}-{\frac {\partial (h_{3}F_{3})}{\partial u_{1}}} \right),\\[5pt]&(\operatorname {curl} \mathbf {F} )_{3}={\frac {1}{h_{1}h_{2}}}\left({\frac {\partial (h_{2}F_{2})}{\partial u_{1}}}-{\frac {\partial (h_{1}F_{1})}{\partial u_{2}}} \right).\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72c5af513489cd914b40cf463007656bc9a9cd3c)
Уравнение для каждого компонента (curl F ) k можно получить путем замены каждого вхождения индекса 1, 2, 3 в циклической перестановке: 1 → 2, 2 → 3 и 3 → 1 (где индексы представляют соответствующие индексы). .
Если ( x 1 , x 2 , x 3 ) являются декартовыми координатами и ( u 1 , u 2 , u 3 ) являются ортогональными координатами, то длина координатного вектора, соответствующего u i . Остальные два компонента ротора являются результатом циклической перестановки индексов . : 3,1,2 → 1,2,3 → 2,3,1

Использование
[ редактировать ]На практике два описанных выше бескоординатных определения используются редко, поскольку практически во всех случаях оператор ротора может быть применен с использованием некоторого набора криволинейных координат , для которых были получены более простые представления.
Обозначение ∇ × F берет свое начало от сходства с трехмерным векторным произведением и полезно в качестве мнемоники в декартовых координатах, если ∇ берется как векторный дифференциальный оператор del . Такие обозначения с участием операторов распространены в физике и алгебре .
Разложенный в трехмерных декартовых координатах (см. Del в цилиндрических и сферических координатах для сферических и цилиндрических координатных представлений), ∇ × F представляет собой F , состоящий из [ F x , F y , F z ] (где индексы указывают компоненты вектор, а не частные производные): где i , j и k — единичные векторы для осей x , y и z соответственно. Это расширяется следующим образом: [8]
![{\displaystyle \nabla \times \mathbf {F} = {\begin {vmatrix}{\boldsymbol {\hat {\imath }}} & {\boldsymbol {\hat {\jmath }}} & {\boldsymbol {\ шляпа {k}}}\\[5mu]{\dfrac {\partial }{\partial x}}&{\dfrac {\partial }{\partial y}}&{\dfrac {\partial }{\partial z }}\\[5mu]F_{x}&F_{y}&F_{z}\end{vmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5e5ef0821b7793380d87a3ddff6be1b5392e1ba2)

Хотя результат и выражен в координатах, он инвариантен при правильном вращении координатных осей, но результат инвертируется при отражении.
В общей системе координат ротор определяется выражением [1] где ε обозначает тензор Леви-Чивита , ∇ ковариантную производную , является определителем метрического тензора , а соглашение Эйнштейна о суммировании подразумевает, что повторяющиеся индексы суммируются. Благодаря симметрии символов Кристоффеля, участвующих в ковариантной производной, это выражение сводится к частной производной: где R k — локальные базисные векторы. Эквивалентно, используя внешнюю производную , ротор можно выразить как:




Здесь ♭ и ♯ — музыкальные изоморфизмы , а ★ — оператор звезды Ходжа . Эта формула показывает, как вычислить ротор F в любой системе координат и как распространить ротор на любое ориентированное трехмерное риманово многообразие. Поскольку это зависит от выбора ориентации, завиток является киральной операцией. Другими словами, если ориентация меняется на противоположную, то и направление завитка также меняется на противоположное.
Примеры
[ редактировать ]Пример 1
[ редактировать ]Предположим, что векторное поле описывает поле скоростей потока жидкости (например, большого резервуара с жидкостью или газом ), а внутри жидкости или газа находится небольшой шарик (центр шара зафиксирован в определенной точке). Если у шара шероховатая поверхность, протекающая мимо него жидкость заставит его вращаться. Ось вращения (ориентированная по правилу правой руки) указывает в сторону завитка поля в центре шара, а угловая скорость вращения равна половине величины завитка в этой точке. [9] Ротор векторного поля в любой точке задается вращением бесконечно малой области в плоскости xy (для z компонента ротора по оси ), плоскости zx (для y компонента ротора по оси ) и yz - плоскость (для компоненты оси x вектора ротора). Это можно увидеть на примерах ниже.
Пример 2
[ редактировать ]

Векторное поле можно разложить как


При визуальном осмотре поле можно охарактеризовать как «вращающееся». Если бы векторы поля представляли линейную силу, действующую на объекты, присутствующие в этой точке, и объект должен был быть помещен внутри поля, объект начал бы вращаться вокруг себя по часовой стрелке. Это справедливо независимо от того, где находится объект.
Расчет завитка:

Результирующее векторное поле, описывающее завиток, во всех точках будет указывать в отрицательном направлении z . Результаты этого уравнения совпадают с тем, что можно было бы предсказать с помощью правила правой руки и правосторонней системы координат . Будучи однородным векторным полем, описанный выше объект будет иметь одинаковую интенсивность вращения независимо от того, где он находится.
Пример 3
[ редактировать ]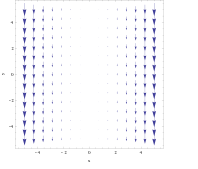

Для векторного поля

изгиб не так очевиден на графике. Однако если взять объект из предыдущего примера и поместить его в любом месте линии x = 3 , сила, действующая с правой стороны, будет немного больше, чем сила, действующая с левой стороны, что заставит его вращаться по часовой стрелке. Используя правило правой руки, можно предсказать, что результирующий завиток будет прямым в отрицательном направлении z . И наоборот, если объект поместить на x = −3 , объект будет вращаться против часовой стрелки, и правило правой руки приведет к положительному направлению z .
Расчет завитка:

Завиток указывает в отрицательном направлении z, когда x положителен, и наоборот. В этом поле интенсивность вращения будет тем больше, чем объект удаляется от плоскости x = 0 .
Дальнейшие примеры
[ редактировать ]- В векторном поле, описывающем линейные скорости каждой части вращающегося диска, находящегося в равномерном круговом движении , ротор имеет одинаковое значение во всех точках, и это значение оказывается ровно в два раза больше векторной угловой скорости диска (ориентированной как обычно по правилу правой руки ). В более общем смысле, для любой текущей массы векторное поле линейной скорости в каждой точке массового потока имеет ротор (завихренность потока в этой точке), равный ровно в два раза локальной векторной угловой скорости массы вокруг этой точки.
- Для любого твердого объекта, на который действует внешняя физическая сила (например, гравитация или электромагнитная сила), можно рассматривать векторное поле, представляющее бесконечно малые вклады силы на единицу объема, действующие в каждой из точек объекта. Это силовое поле может создать чистый крутящий момент объекта вокруг его центра масс, и этот крутящий момент оказывается прямо пропорциональным и векторно параллельным (векторному) интегралу от ротора силового поля по всему объему.
- Из четырех уравнений Максвелла два — закон Фарадея и закон Ампера — можно компактно выразить с помощью ротора. Закон Фарадея утверждает, что ротор электрического поля равен противоположности скорости изменения магнитного поля во времени, а закон Ампера связывает ротор магнитного поля с током и скоростью изменения электрического поля во времени.
Личности
[ редактировать ]В общих криволинейных координатах , что ротор векторного произведения векторных полей v и F (не только в декартовых координатах) можно показать равен

Поменяв местами векторное поле v и оператор ∇ , мы приходим к векторному произведению векторного поля на ротор векторного поля: где ∇ F — это индекс Фейнмана, который учитывает только изменение, вызванное векторным полем F (т. е. в этом случае v считается постоянным в пространстве).

Другой пример — ротор ротора векторного поля. Можно показать, что в общих координатах это тождество определяет векторный лапласиан F и , обозначенный как ∇ 2 Ф.

Ротор градиента любого скалярного . поля φ всегда является нулевым векторным полем что следует из антисимметрии в определении ротора и симметрии вторых производных .

Дивергенция : ротора любого векторного поля равна нулю

Если φ — скалярная функция, а F — векторное поле, то

Обобщения
[ редактировать ]Операции векторного исчисления grad , curl и div легче всего обобщаются в контексте дифференциальных форм, что включает в себя ряд шагов. Короче говоря, они соответствуют производным 0-форм, 1-форм и 2-форм соответственно. Геометрическая интерпретация ротора как вращения соответствует отождествлению бивекторов (2-векторов) в трех измерениях со специальной ортогональной алгеброй Ли. бесконечно малых вращений (в координатах — кососимметричные матрицы 3 × 3), а представление вращений векторами соответствует идентификации 1-векторов (эквивалентно 2-векторам) и , все это трехмерные пространства.

Дифференциальные формы
[ редактировать ]В трех измерениях дифференциальная 0-форма представляет собой вещественную функцию f ( x , y , z ) ; дифференциальная 1-форма — это следующее выражение, где коэффициенты являются функциями: дифференциальная 2-форма - это формальная сумма, опять же с функциональными коэффициентами: а дифференциальная 3-форма определяется одним членом с одной функцией в качестве коэффициента: (Здесь a -коэффициенты являются вещественными функциями трех переменных; «клиновые произведения», например dx ∧ dy , можно интерпретировать как своего рода ориентированные элементы площади, dx ∧ dy = − dy ∧ dx и т. д.)



Внешняя производная k в -формы R 3 определяется как ( k + 1) -форма сверху, а в R н если, например, тогда внешняя производная d приводит к


Таким образом, внешняя производная 1-формы является 2-формой, а 2-формы — 3-формой. С другой стороны, из-за взаимозаменяемости смешанных производных инструментов и антисимметрия,


двойное применение внешней производной дает (ноль -форма).


Таким образом, обозначая пространство k -форм через Ω к ( Р 3 ) и внешней производной по d получается последовательность:

Здесь Ом к ( Р н ) — пространство сечений внешней алгебры Λ к ( Р н ) векторное расслоение над R н , размерность которого представляет собой биномиальный коэффициент ( н
к ) ; отметим, что Ω к ( Р 3 ) = 0 для k > 3 или k < 0 . Записав только размеры, получим ряд треугольника Паскаля :
одномерные слои соответствуют скалярным полям, а трехмерные — векторным полям, как описано ниже. По модулю подходящих отождествлений три нетривиальных вхождения внешней производной соответствуют grad, curl и div.
Дифференциальные формы и дифференциал могут быть определены в любом евклидовом пространстве или даже в любом многообразии без какого-либо понятия римановой метрики. На римановом многообразии или, в более общем смысле, псевдоримановом многообразии , k -формы могут быть отождествлены с k -векторными полями ( k -формы — это k -ковекторные поля, а псевдориманова метрика дает изоморфизм между векторами и ковекторами), и в ориентированном векторном пространстве невырожденной формы (изоморфизм между векторами и ковекторами) существует изоморфизм между k -векторами и ( n − k ) -векторами; в частности, на (касательном пространстве) ориентированного псевдориманова многообразия. Таким образом, на ориентированном псевдоримановом многообразии можно менять местами k -формы, k -векторные поля, ( n - k ) -формы и ( n - k ) -векторные поля; это известно как двойственность Ходжа . Конкретно на Р 3 это дано:
- 1-формы и 1-векторные поля: 1-форма a x dx + a y dy + a z dz соответствует векторному полю ( a x , a y , a z ) .
- заменяют 1-формы и 2-формы: dx двойственной величиной dy ∧ dz (т. е. опускают dx ), а также, учитывая ориентацию: dy соответствует dz ∧ dx = − dx ∧ dz , а dz соответствует dx ∧ ды . Таким образом, форма a x dx + a y dy + a z dz соответствует «двойственной форме» a z dx ∧ dy + a y dz ∧ dx + a x dy ∧ dz .
Таким образом, отождествляя 0-формы и 3-формы со скалярными полями, а 1-формы и 2-формы с векторными полями:
- grad переводит скалярное поле (0-форму) в векторное поле (1-форму);
- Curl переводит векторное поле (1-форму) в псевдовекторное поле (2-форму);
- div преобразует псевдовекторное поле (2-форму) в псевдоскалярное поле (3-форму)
С другой стороны, тот факт, что д 2 = 0 соответствует тождествам для любого скалярного поля f и для любого векторного поля v .


Grad и div обобщаются на все ориентированные псевдоримановы многообразия с той же геометрической интерпретацией, поскольку пространства 0-форм и n -форм в каждой точке всегда одномерны и могут быть отождествлены со скалярными полями, а пространства 1-мерных -формы и ( n − 1) -формы всегда послойно n -мерны и могут быть отождествлены с векторными полями.
Curl не обобщает таким образом до 4 или более измерений (или до 2 или менее измерений); в 4 измерениях размеры
поэтому ротор 1-векторного поля (послойно 4-мерного) представляет собой 2-векторное поле , которое в каждой точке принадлежит 6-мерному векторному пространству, и поэтому имеем что дает сумму шести независимых членов и не может быть отождествлено с 1-векторным полем. Также невозможно осмысленно перейти от 1-векторного поля к 2-векторному полю и к 3-векторному полю (4 → 6 → 4), поскольку двукратное взятие дифференциала дает ноль ( d 2 = 0 ). Таким образом, таким образом не возникает никакой функции ротора от векторных полей к векторным полям в других измерениях.

Однако можно определить ротор векторного поля как 2-векторное поле в целом, как описано ниже.
Завивайте геометрически
[ редактировать ]2-векторы соответствуют внешней степени Λ 2 В ; при наличии скалярного произведения в координатах это кососимметричные матрицы, геометрически рассматриваемые как специальная ортогональная алгебра Ли ( V ) бесконечно малых вращений. Это имеет ( н
2 ) = 1/2 измерений и позволяет − n ( n 1) интерпретировать дифференциал 1-векторного поля как его бесконечно малые вращения. Только в 3-х измерениях (или тривиально в 0-х измерениях) мы имеем n = 1/2 , что является . n ( n − 1) наиболее элегантным и распространенным случаем В двумерном измерении ротор векторного поля - это не векторное поле, а функция, поскольку двумерное вращение задается углом (скаляр - ориентация требуется, чтобы выбрать, считать ли вращение по часовой стрелке или против часовой стрелки положительным); это не div, а скорее перпендикулярно ему. В трехмерном измерении ротор векторного поля является, как известно, векторным полем (в одномерном и нулевом измерениях ротор векторного поля равен 0, поскольку не существует нетривиальных 2-векторов), а в четырехмерном ротор векторное поле геометрически в каждой точке является элементом 6-мерной алгебры Ли. .


Ротор трехмерного векторного поля, которое зависит только от двух координат (скажем, x и y ), представляет собой просто вертикальное векторное поле (в направлении z ), величина которого равна ротору двумерного векторного поля, как в примерах. на этой странице.
Рассмотрение ротора как 2-векторного поля (антисимметричного 2-тензора) использовалось для обобщения векторного исчисления и связанной с ним физики на более высокие измерения. [10]
Обратный
[ редактировать ]В случае, когда дивергенция векторного поля V равна нулю, векторное поле W существует такое, что V = ротор( W ) . [ нужна ссылка ] Вот почему магнитное поле , характеризующееся нулевой дивергенцией, можно выразить как ротор магнитного векторного потенциала .
Если W векторное поле с curl( W ) = V , то добавление любого векторного поля градиента grad( f ) к W приведет к другому векторному полю W + grad( f ) такому, что curl( W + grad( f )) = В тоже. Это можно резюмировать, сказав, что обратный ротор трехмерного векторного поля можно получить с точностью до неизвестного безвихревого поля с помощью закона Био – Савара .
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Перейти обратно: а б Вайсштейн, Эрик В. «Кёрл» . Математический мир .
- ^ Стандарт ISO/IEC 80000-2 Норма ISO/IEC 80000-2, пункт 2-17.16
- ^ Труды Лондонского математического общества, 9 марта 1871 г.
- ^ Собрание сочинений Джеймса МакКалла . Дублин: Ходжес. 1880.
- ^ Самые ранние известные варианты использования некоторых математических слов tripod.com
- ^ Математические методы в физике и технике, К. Ф. Райли, М. П. Хобсон, С. Дж. Бенс, Cambridge University Press, 2010, ISBN 978-0-521-86153-3
- ^ Векторный анализ (2-е издание), М. Р. Шпигель, С. Липшуц, Д. Спеллман, Очерки Шаума, McGraw Hill (США), 2009 г., ISBN 978-0-07-161545-7
- ^ Арфкен, Джордж Браун (2005). Математические методы для физиков . Вебер, Ханс-Юрген (6-е изд.). Бостон: Эльзевир. п. 43. ИСБН 978-0-08-047069-6 . OCLC 127114279 .
- ^ Гиббс, Джозайя Уиллард ; Уилсон, Эдвин Бидвелл (1901), Векторный анализ , Публикации к двухсотлетию Йельского университета, Сыновья К. Скрибнера, hdl : 2027/mdp.39015000962285
- ^ Макдэвид, AW; Макмаллен, компакт-диск (30 октября 2006 г.). «Обобщение перекрестных произведений и уравнений Максвелла на универсальные дополнительные измерения». arXiv : hep-ph/0609260 .
Дальнейшее чтение
[ редактировать ]- Корн, Гранино Артур и Тереза М. Корн (январь 2000 г.). Математический справочник для ученых и инженеров: определения, теоремы и формулы для справки и обзора . Нью-Йорк: Dover Publications. стр. 157–160. ISBN 0-486-41147-8 .
- Шей, Х.М. (1997). Div, Grad, Curl и все такое: неформальный текст по векторному исчислению . Нью-Йорк: Нортон. ISBN 0-393-96997-5 .
Внешние ссылки
[ редактировать ]- «Завиток» , Математическая энциклопедия , EMS Press , 2001 [1994]
- «Многомерное исчисление» . mathinsight.org . Проверено 12 февраля 2022 г.
- «Дивергенция и завиток: язык уравнений Максвелла, течения жидкости и многого другого» . 21 июня 2018 г. Архивировано из оригинала 24 ноября 2021 г. – на YouTube .