Робот



Робот программируемая — это машина , особенно компьютером , способная автоматически выполнять сложную серию действий. [ 2 ] Робот может управляться внешним устройством управления, либо управление может быть встроенным. Роботы могут быть созданы так, чтобы имитировать человеческую форму , но большинство роботов — это машины, выполняющие определенные задачи, разработанные с упором на абсолютную функциональность, а не на выразительную эстетику.
Роботы могут быть автономными или полуавтономными и варьируются от гуманоидов, таких как Honda от Advanced Step in Innovative Mobility ( ASIMO ) и TOSY , играющий в пинг-понг ( TOPIO ), до промышленных роботов , медицинских операционных роботов , роботов для помощи пациентам, собак. терапевтические роботы, коллективно запрограммированные роевые роботы , беспилотные летательные аппараты, такие как General Atomics MQ-1 Predator , и даже микроскопические нанороботы . Имитируя реалистичный внешний вид или автоматизируя движения, робот может передать чувство интеллекта или мысль собственную автономные устройства . Ожидается, что в будущем будут распространяться, при этом домашняя робототехника и автономные автомобили станут одними из основных движущих сил. [ 3 ]
Отрасль технологии, которая занимается проектированием, изготовлением, эксплуатацией и применением роботов. [ 4 ] а также компьютерные системы для их управления, сенсорной обратной связи и обработки информации – робототехника . Эти технологии связаны с автоматизированными машинами, которые могут заменять людей в опасных средах или производственных процессах или напоминать людей по внешнему виду, поведению или познанию. Многие из сегодняшних роботов вдохновлены природой, внося свой вклад в область биоробототехники . Эти роботы также создали новую отрасль робототехники: мягкую робототехнику .
Со времен древней цивилизации существовало множество сообщений о настраиваемых пользователем автоматизированных устройствах и даже автоматах, напоминающих людей и других животных, таких как аниматроники , предназначенных в первую очередь для развлечения. По мере развития механических технологий в индустриальную эпоху появились более практические приложения, такие как автоматизированные машины, дистанционное управление и беспроводное дистанционное управление .
Термин происходит от славянского корня «робот » и имеет значения, связанные с трудом. Слово «робот» впервые было использовано для обозначения вымышленного гуманоида в на чешском языке пьесе RUR ( Rossumovi Univerzální Roboti – Универсальные роботы Россума ) Карела Чапека был брат Карела Йозеф Чапек . 1920 года, хотя настоящим изобретателем этого слова [ 5 ] [ 6 ] [ 7 ] Электроника стала движущей силой развития с появлением первых электронных автономных роботов, созданных Уильямом Греем Уолтером в Бристоле, Англия, в 1948 году, а также с числовым программным управлением станков (ЧПУ) в конце 1940-х годов, созданных Джоном Т. Парсонсом и Фрэнк Л. Стулен .
Первый коммерческий, цифровой и программируемый робот был построен Джорджем Деволом в 1954 году и получил название Unimate . Он был продан компании General Motors в 1961 году, где использовался для подъема кусков горячего металла из машин для литья под давлением на заводе Inland Fisher Guide в районе Вест-Трентон в городке Юинг, штат Нью-Джерси . [ 8 ]
Роботы заменили людей [ 9 ] при выполнении повторяющихся и опасных задач, которые люди предпочитают не выполнять или не могут выполнять из-за ограничений по размеру или которые происходят в экстремальных условиях, таких как космическое пространство или морское дно. Существуют опасения по поводу растущего использования роботов и их роли в обществе. Роботов обвиняют в росте технологической безработицы , поскольку они заменяют рабочих во все большем количестве функций. [ 10 ] Использование роботов в военных действиях вызывает этические проблемы. Возможности автономности роботов и их потенциальные последствия уже рассматривались в художественной литературе и могут стать реальной проблемой в будущем.
Краткое содержание


Слово «робот» может относиться как к физическим роботам, так и к виртуальным программным агентам , но последних обычно называют « ботами» . [ 11 ] Не существует единого мнения относительно того, какие машины можно считать роботами, но среди экспертов и общественности существует общее мнение, что роботы, как правило, обладают некоторыми или всеми из следующих способностей и функций: принимать электронные программы, обрабатывать данные или физическое восприятие в электронном виде, работать автономно. в некоторой степени передвигаться, управлять физическими частями себя или физическими процессами, ощущать окружающую среду и манипулировать ею, а также демонстрировать разумное поведение, особенно поведение, имитирующее людей или других животных. [ 12 ] [ 13 ] С концепцией робота связана область синтетической биологии , которая изучает существа, природа которых больше сравнима с живыми существами, чем с машинами.
История
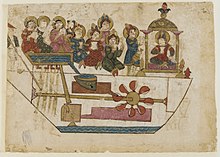
Идея автоматов берет свое начало в мифологии многих культур мира. Инженеры и изобретатели древних цивилизаций, включая Древний Китай , [ 14 ] Древняя Греция и Птолемеевский Египет , [ 15 ] пытались построить самодействующие машины, некоторые из которых напоминали животных и людей. Ранние описания автоматов включают искусственных голубей Архита , [ 16 ] искусственные птицы Мози и Лу Баня , [ 17 ] «говорящий» автомат Героя Александрийского , автомат-умывальник Филона Византийского и человеческий автомат, описанный в « Ли Цзы» . [ 14 ]
Раннее начало
Многие древние мифологии и большинство современных религий включают искусственных людей, таких как механические слуги, созданные греческим богом Гефестом. [ 18 ] ( Вулкан для римлян), глиняные големы из еврейских легенд и глиняные гиганты из скандинавских легенд, а также Галатея , мифическая статуя Пигмалиона , ожившая. Примерно с 400 г. до н.э. мифы о Крите включают Талоса , бронзового человека, охранявшего остров от пиратов.
В Древней Греции греческий инженер Ктесибий (ок. 270 г. до н. э.) «применил знания пневматики и гидравлики для создания первых органных и водяных часов с движущимися фигурами». [ 19 ] : 2 [ 20 ] В IV веке до нашей эры греческий математик Архит из Тарента предположил существование механической паровой птицы, которую он назвал «Голубь». Герой Александрийский (10–70 гг. н. э.) , греческий математик и изобретатель, создал множество настраиваемых пользователем автоматизированных устройств и описал машины, приводимые в движение давлением воздуха, пара и воды. [ 21 ]
Локапаннатти XI века рассказывает о том, как мощи Будды защищали механические роботы (бхута вахана янта) из королевства Рома Вишая (Рим); пока они не были разоружены царем Ашокой . [ 22 ]
III века В древнем Китае текст « Ли Цзы» описывает рассказ о гуманоидных автоматах, включающий гораздо более раннюю встречу китайского императора Му из Чжоу и инженера-механика, известного как Ян Ши, «ремесленника». Ян Ши с гордостью подарил королю фигуру в натуральную величину в форме человека, созданную его механическим «творением рук», сделанную из кожи, дерева и искусственных органов. [ 14 ] Есть также сообщения о летающих автоматах в Хань Фэй Цзы V века до нашей эры и других текстах, которые приписывают Мохистскому философу Моцзы и его современнику Лу Баню изобретение искусственных деревянных птиц ( майюань ), которые могли успешно летать. [ 17 ]

В 1066 году китайский изобретатель Су Сун построил водяные часы в форме башни с механическими фигурками, отбивающими часы. [ 23 ] [ 24 ] [ 25 ] Его механизм имел программируемую драм-машину с колышками ( кулачками ), которые натыкались на маленькие рычаги , управляющие ударными инструментами. Барабанщика можно было заставить играть разные ритмы и разные рисунки барабанов, перемещая колышки в разные места. [ 25 ]
Самарангана Сутрадхара , санскритский трактат Бходжи (11 век), включает главу о строительстве механических устройств ( автоматов ), в том числе механических пчел и птиц, фонтанов в форме людей и животных, а также кукол мужского и женского пола, которые наполняли масляные лампы, танцевали , играл на инструментах и воспроизводил сцены из индуистской мифологии. [ 26 ] [ 27 ] [ 28 ]
XIII века Мусульманский ученый Исмаил аль-Джазари создал несколько автоматических устройств. Он построил автоматических движущихся павлинов, приводимых в движение гидроэнергией. [ 29 ] Он также изобрел самые ранние известные автоматические ворота, приводимые в движение гидроэнергией. [ 30 ] создал автоматические двери как часть одних из своих сложных водяных часов . [ 31 ] аль-Джазари Одним из гуманоидных автоматов была официантка, которая могла подавать воду, чай или напитки. Напиток хранился в баке с резервуаром, откуда напиток капает в ведро, а через семь минут - в чашку, после чего из автоматической двери появляется официантка, раздающая напиток. [ 32 ] для мытья рук Аль-Джазари изобрел автомат со смывным механизмом, который сейчас используется в современных туалетах со смывом . На нем изображена женщина- гуманоид-автомат, стоящая у чаши, наполненной водой. Когда пользователь тянет рычаг, вода сливается, а женский автомат снова наполняет таз. [ 19 ]
Марк Э. Рошейм резюмирует достижения в области робототехники, достигнутые мусульманскими инженерами, особенно аль-Джазари, следующим образом:
В отличие от греческих проектов, эти арабские примеры демонстрируют интерес не только к драматическим иллюзиям, но и к манипулированию окружающей средой ради человеческого комфорта. Таким образом, величайшим вкладом арабов, помимо сохранения, распространения и развития работ греков, стала концепция практического применения. Это был ключевой элемент, которого не хватало греческой робототехнике. [ 19 ] : 9

В 14 веке на коронации английского короля Ричарда II присутствовал ангел-автомат. [ 34 ]
В эпохи Возрождения Италии Леонардо да Винчи (1452–1519) примерно в 1495 году набросал планы гуманоидного робота. Записные книжки да Винчи, вновь открытые в 1950-х годах, содержали подробные рисунки механического рыцаря, ныне известного как робот Леонардо , способного сидеть и махать рукой. руки и двигать головой и челюстью. [ 35 ] Дизайн, вероятно, был основан на анатомических исследованиях, записанных в его «Витрувианском человеке» . Неизвестно, пытался ли он его построить. Согласно Британской энциклопедии , Леонардо да Винчи , возможно, находился под влиянием классических автоматов аль-Джазари. [ 29 ]
В Японии сложные животные и человеческие автоматы были построены между 17 и 19 веками, многие из которых описаны в « Каракури дзуи» 18 века ( «Иллюстрированное оборудование» , 1796). Одним из таких автоматов была каракури нингё , механизированная марионетка . [ 36 ] Существовали различные варианты каракури: каракури Бутай , которые использовались в театре, каракури Дзасики , которые были небольшими и использовались дома, и каракури Даси, которые использовались на религиозных праздниках, где куклы использовались для инсценировок традиционных мифы и легенды .
Во Франции между 1738 и 1739 годами Жак де Вокансон выставил несколько автоматов в натуральную величину: флейтиста, трубочиста и утку. Механическая утка могла хлопать крыльями, вытягивать шею и глотать пищу из рук экспонента, создавая иллюзию переваривания пищи путем выделения веществ, хранящихся в скрытом отсеке. [ 37 ] Примерно 30 лет спустя в Швейцарии часовщик Пьер Жаке-Дро изготовил несколько сложных механических фигур, способных писать и играть музыку. Некоторые из этих устройств до сих пор существуют и работают. [ 38 ]
Системы дистанционного управления
Дистанционно управляемые аппараты были продемонстрированы в конце 19 века в виде нескольких типов дистанционно управляемых торпед . В начале 1870-х годов были созданы дистанционно управляемые торпеды Джона Эрикссона ( пневматические ), Джона Луи Лэя (управляемые по электрическому проводу) и Виктора фон Шелихи (управляемые по электрическому проводу). [ 39 ]
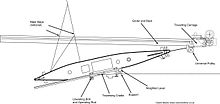
Торпеда «Бреннан» , изобретенная Луисом Бреннаном в 1877 году, приводилась в действие двумя винтами противоположного вращения, которые вращались за счет быстрого выдергивания проводов из барабанов, намотанных внутри торпеды . Дифференциальная скорость по проводам, подключенным к береговой станции, позволила направить торпеду к цели, что сделало ее «первой в мире практичной управляемой ракетой ». [ 40 ] В 1897 году британский изобретатель Эрнест Уилсон получил патент на торпеду, дистанционно управляемую «герцевыми» (радиоволнами). [ 41 ] [ 42 ] а в 1898 году Никола Тесла с беспроводным управлением публично продемонстрировал торпеду , которую он надеялся продать ВМС США . [ 43 ] [ 44 ]
В 1903 году испанский инженер Леонардо Торрес Кеведо систему радиоуправления под названием «Телекино» продемонстрировал в Парижской академии наук . [ 45 ] который он хотел использовать для управления дирижаблем собственной конструкции. Он получил несколько патентов на систему в других странах. [ 46 ] [ 47 ] В отличие от предыдущих методов «включения/выключения», Торрес разработал метод управления любым механическим или электрическим устройством в различных рабочих состояниях. [ 48 ] Телекино , с дистанционным управлением трициклом 1904 года считалось первым случаем беспилотного наземного аппарата электролодкой а также с экипажем 1906 года, управляемой на расстоянии более 2 км. [ 49 ]
Арчибальд Лоу , известный как «отец систем радионаведения» за свои новаторские работы над управляемыми ракетами и самолетами во время Первой мировой войны . самолет с дистанционным управлением В 1917 году он продемонстрировал Королевскому летному корпусу и в том же году построил первую ракету с проводным наведением.
Ранние роботы

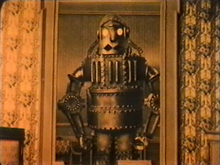
В 1928 году один из первых роботов-гуманоидов Эрик был выставлен на ежегодной выставке Общества инженеров-моделей в Лондоне, где произнес речь. Каркас робота, изобретенный У.Х. Ричардсом, состоял из алюминиевого броневого корпуса с одиннадцатью электромагнитами и одним двигателем, питаемым от источника питания на двенадцать вольт. Робот мог двигать руками и головой, а также управляться с помощью пульта дистанционного управления или голосового управления. [ 50 ] И Эрик, и его «брат» Джордж совершили поездку по миру. [ 51 ]
Westinghouse Electric Corporation построила Televox в 1926 году; это был картонный вырез, подключенный к различным устройствам, которые пользователи могли включать и выключать. робот-гуманоид, известный как Электро дебютировал В 1939 году на Всемирной выставке в Нью-Йорке . [ 52 ] [ 53 ] Ростом семь футов (2,1 м) и весом 265 фунтов (120,2 кг), он мог ходить по голосовым командам, произносить около 700 слов (с использованием проигрывателя со скоростью вращения 78 об/мин ), курить сигареты, надувать воздушные шары, а также двигать головой и руками. . Корпус состоял из стальной шестерни, кулачка и каркаса двигателя, покрытых алюминиевой обшивкой. первого японского робота Гакутенсоку В 1928 году биолог Макото Нисимура спроектировал и сконструировал .
Немецкая летающая бомба Фау-1 была оснащена системами автоматического наведения и контроля дальности, летела по заданному курсу (который мог включать разворот на 90 градусов) и входила в предельное пикирование после заданной дистанции. В современных описаниях его называли «роботом». [ 54 ]
Современные автономные роботы
Первые электронные автономные роботы со сложным поведением были созданы Уильямом Греем Уолтером из Неврологического института Бердена в Бристоле , Англия, в 1948 и 1949 годах. Он хотел доказать, что богатые связи между небольшим количеством клеток мозга могут вызывать очень сложное поведение . по сути, секрет работы мозга заключался в том, как он устроен. Его первые роботы, названные Элмер и Элси , были построены между 1948 и 1949 годами, и их часто называли черепахами из-за их формы и медленной скорости движения. Трехколесные роботы-черепахи были способны использовать фототакси , с помощью которого они могли найти дорогу к станции подзарядки, когда у них заканчивался заряд батареи.
Уолтер подчеркивал важность использования чисто аналоговой электроники для моделирования процессов мозга в то время, когда его современники, такие как Алан Тьюринг и Джон фон Нейман, обращались к взгляду на психические процессы с точки зрения цифровых вычислений . Его работа вдохновила последующие поколения исследователей робототехники, таких как Родни Брукс , Ганс Моравец и Марк Тилден . Уолтера Современные воплощения черепах можно найти в виде робототехники BEAM . [ 55 ]
Первый программируемый робот с цифровым управлением был изобретен Джорджем Деволом в 1954 году и в конечном итоге получил название Unimate . В конечном итоге это заложило основы современной индустрии робототехники. [ 56 ] Devol продала первый Unimate компании General Motors в 1960 году, а в 1961 году он был установлен на заводе в Трентоне, штат Нью-Джерси, для подъема горячих кусков металла из машины для литья под давлением и их штабелирования. [ 57 ]
Первый робот-укладчик паллет был представлен в 1963 году компанией Fuji Yusoki Kogyo. [ 58 ] В 1973 году был запатентован робот с шестью осями с электромеханическим приводом. [ 59 ] [ 60 ] [ 61 ] компанией KUKA robotics в Германии, а программируемый универсальный манипулятор был изобретен Виктором Шейнманом в 1976 году, а его конструкция была продана компании Unimation .
В настоящее время широко используются коммерческие и промышленные роботы, выполняющие работу дешевле или с большей точностью и надежностью, чем люди. Их также нанимают на работу, которая слишком грязна, опасна или скучна, чтобы быть подходящей для людей. Роботы широко используются в производстве, сборке и упаковке, транспорте, освоении Земли и космоса, хирургии, вооружении, лабораторных исследованиях и массовом производстве потребительских и промышленных товаров. [ 62 ]
Будущее развитие и тенденции
| Внешние видео | |
|---|---|
Появились различные методы развития науки о робототехнике и роботах. Одним из методов является эволюционная робототехника , при которой на испытания подвергаются несколько разных роботов. Те из них, которые работают лучше всего, используются в качестве модели для создания следующего «поколения» роботов. Другой метод — развивающая робототехника , которая отслеживает изменения и развитие одного робота в области решения проблем и других функций. Совсем недавно был представлен еще один новый тип робота, который действует как смартфон и робот, и называется RoboHon. [ 63 ]
По мере того, как роботы становятся более совершенными, в конечном итоге может появиться стандартная компьютерная операционная система, предназначенная главным образом для роботов. Операционная система робота (ROS) — это набор программ с открытым исходным кодом, разрабатываемый, среди прочего, в Стэнфордском университете , Массачусетском технологическом институте и Техническом университете Мюнхена , Германия. ROS предоставляет способы программирования навигации и конечностей робота независимо от конкретного используемого оборудования. Он также предоставляет команды высокого уровня для таких элементов, как распознавание изображений и даже открытие дверей. Когда ROS загружается на компьютер робота, он получает данные о таких атрибутах, как длина и движение конечностей робота. Он будет передавать эти данные алгоритмам более высокого уровня. Microsoft также разрабатывает систему «Windows для роботов» с помощью своей студии Robotics Developer Studio, которая доступна с 2007 года. [ 64 ]
Япония надеется на полномасштабную коммерциализацию сервисных роботов к 2025 году. Многие технологические исследования в Японии проводятся японскими правительственными учреждениями, в частности Министерством торговли. [ 65 ]
Многие будущие применения робототехники кажутся людям очевидными, хотя они значительно превосходят возможности роботов, доступных на момент предсказания. [ 66 ] [ 67 ] Еще в 1982 году люди были уверены, что когда-нибудь роботы: [ 68 ] 1. Очистите детали, удалив заусенец 2. Покрасьте автомобили распылением абсолютно без человеческого присутствия 3. Упакуйте вещи в коробки — например, расположите шоколадные конфеты в коробках из-под конфет 4. Сделайте жгут электрических кабелей 5. Загрузите грузовики коробками — проблема с упаковкой 6. Обращаться с мягкими товарами, такими как одежда и обувь 7. Стричь овец 8. Использовать в качестве протезов 9. Готовить фаст-фуд и работать в других сферах услуг 10. Работать бытовым роботом.
Как правило, такие прогнозы слишком оптимистичны по временным рамкам.
Новые функции и прототипы
Этот раздел необходимо обновить . ( август 2021 г. ) |
В 2008 году компания Caterpillar Inc. разработала самосвал, который может передвигаться самостоятельно, без участия оператора. [ 69 ] Многие аналитики полагают, что беспилотные грузовики могут в конечном итоге произвести революцию в логистике. [ 70 ] К 2014 году у Caterpillar появился беспилотный самосвал, который, как ожидается, значительно изменит процесс добычи полезных ископаемых. В 2015 году эти самосвалы Caterpillar активно использовались на горнодобывающих работах в Австралии горнодобывающей компанией Rio Tinto Coal Australia . [ 71 ] [ 72 ] [ 73 ] [ 74 ] Некоторые аналитики полагают, что в течение следующих нескольких десятилетий большинство грузовиков станут беспилотными. [ 75 ]
Грамотный или «читающий робот» по имени Мардж обладает интеллектом, основанным на программном обеспечении. Она может читать газеты, находить и исправлять слова с ошибками, узнавать о таких банках, как Barclays, и понимать, что в некоторых ресторанах поесть лучше, чем в других. [ 76 ]
Бакстер — новый робот, представленный в 2012 году, который учится под руководством. Рабочий мог научить Бакстера выполнять задачу, совершая нужные движения руками и заставляя Бакстера запоминать их. На руке Бакстера имеются дополнительные циферблаты, кнопки и элементы управления для большей точности и функциональности. Любой обычный работник может запрограммировать Бакстера, и это займет всего несколько минут, в отличие от обычных промышленных роботов, для использования которых требуются обширные программы и кодирование. Это означает, что для работы Baxter не требуется никакого программирования. Инженеры-программисты не нужны. Это также означает, что Бакстера можно научить выполнять несколько более сложных задач. Сойер был добавлен в 2015 году для выполнения более мелких и точных задач. [ 77 ]
Разработаны прототипы кухонных роботов, которые можно запрограммировать для автономного, динамичного и регулируемого приготовления отдельных блюд. [ 78 ] [ 79 ]
Этимология

Слово «робот» было представлено публике чешским межвоенного периода писателем Карелом Чапека в его пьесе «RUR» («Универсальные роботы Россума») , опубликованной в 1920 году. [ 6 ] Действие игры начинается на фабрике, которая использует химический заменитель протоплазмы для производства живых, упрощенных людей, называемых роботами. В пьесе не подробно рассматривается технология создания этих живых существ, но своим внешним видом они являются прообразом современных представлений об андроидах , существах, которых можно принять за людей. Эти рабочие массового производства изображаются эффективными, но бесчувственными, неспособными к оригинальному мышлению и безразличными к самосохранению. ли роботы Вопрос заключается в том, эксплуатируются и каковы последствия человеческой зависимости от товарного труда (особенно после того, как ряд специально созданных роботов достигают самосознания и подстрекают роботов по всему миру восстать против людей).
Сам Карел Чапек не придумал это слово. Он написал короткое письмо со ссылкой на этимологию из Оксфордского словаря английского языка , в котором назвал своего брата, художника и писателя Йозефа Чапека , как его фактического создателя. [ 6 ]
В статье в чешском журнале Lidové noviny в 1933 году он объяснил, что изначально хотел назвать этих существ laboři ( « рабочие » , от латинского « труд» ). Однако ему это слово не понравилось, и он обратился за советом к своему брату Йозефу, который предложил роботи . Слово robota буквально означает « барщина , крепостной труд » и в переносном смысле « тяжелый труд » , на чешском языке , а также (в более общем смысле) « работа, труд » на многих славянских языках (например: болгарском , русском , сербском , словацком , польском , македонский , украинский , архаичный чешский, а также робот на венгерском языке ). Традиционно робота (венгерский робот ) — это период работы, который крепостной (барщинный) должен был отдавать своему господину, обычно шесть месяцев в году. Происхождение слова — старославянское работа « » на современном болгарском, македонском и русском языках), которое , ( « работа » в свою очередь, происходит от праиндоевропейского корня * орбх- . Робот родственен немецкому Arbeit « работа » . [ 80 ] [ 81 ]
Английское произношение этого слова изменилось относительно быстро с момента его появления. В США в конце 1930-х - начале 1940-х годов оно произносилось / ˈ r oʊ b oʊ t / . [ 82 ] [ нужен лучший источник ] К концу 1950-х - началу 1960-х годов некоторые произносили это слово / ˈ r oʊ b ə t / , а другие использовали / ˈ r oʊ b ɒ t /. [ 83 ] К 1970-м годам его нынешнее произношение / ˈ r oʊ b ɒ t / стало преобладающим.
Слово робототехника , используемое для описания этой области исследований, [ 4 ] был придуман писателем-фантастом Айзеком Азимовым . Азимов создал « Три закона робототехники» , которые являются постоянной темой в его книгах. С тех пор они использовались многими другими для определения законов, используемых в художественной литературе. (Три закона — чистая выдумка, и ни одна из созданных на сегодняшний день технологий не способна понять их или следовать им, и на самом деле большинство роботов служат военным целям, что совершенно противоречит первому закону, а зачастую и третьему закону. «Люди думают о законе Азимова. законы, но они были созданы для того, чтобы показать, что простая этическая система не работает. Если вы прочитаете короткие рассказы, каждый из них рассказывает о неудачах, и они совершенно непрактичны», — сказала доктор Джоанна Брайсон из Университета. Бата. [ 84 ] )
Современные роботы

Мобильный робот
Мобильные роботы [ 85 ] имеют возможность передвигаться в своей среде и не привязаны к одному физическому местоположению. Примером мобильного робота, который сегодня широко используется, является транспортное средство с автоматическим управлением или транспортное средство с автоматическим управлением (AGV). AGV — это мобильный робот, который следует за маркерами или проводами на полу или использует зрение или лазеры. [ 86 ] AGV обсуждаются далее в этой статье.
Мобильные роботы также используются в промышленности, военной сфере и сфере безопасности. [ 87 ] Они также появляются в качестве потребительских товаров, предназначенных для развлечения или выполнения определенных задач, таких как уборка пылесосом. Мобильные роботы находятся в центре внимания многих современных исследований, и почти в каждом крупном университете есть одна или несколько лабораторий, занимающихся исследованиями мобильных роботов. [ 88 ]
Мобильные роботы обычно используются в жестко контролируемых средах, например, на сборочных линиях, поскольку им трудно реагировать на неожиданное вмешательство. Из-за этого большинство людей редко сталкиваются с роботами. Однако домашние роботы для уборки и обслуживания все чаще встречаются в домах и вокруг них в развитых странах. Роботов также можно найти в военной сфере. [ 89 ]
Промышленные роботы (манипулирующие)

Промышленные роботы обычно состоят из шарнирной руки (многозвенного манипулятора) и концевого эффектора , прикрепленного к неподвижной поверхности. Одним из наиболее распространенных типов концевых эффекторов является захват .
Международная организация по стандартизации дает определение манипулирующего промышленного робота в стандарте ISO 8373 :
«автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям, который может быть фиксированным или передвижным для использования в приложениях промышленной автоматизации». [ 90 ]
Это определение используется Международной федерацией робототехники , Европейской исследовательской сетью робототехники (EURON) и многими национальными комитетами по стандартизации. [ 91 ]
Сервисный робот
Чаще всего промышленные роботы представляют собой фиксированные роботизированные руки и манипуляторы, используемые в основном для производства и распределения товаров. Термин «сервисный робот» имеет менее четкое определение. Международная федерация робототехники предложила предварительное определение: «Сервисный робот — это робот, который работает полу- или полностью автономно и выполняет услуги, полезные для благополучия людей и оборудования, исключая производственные операции». [ 92 ]
Образовательные (интерактивные) роботы
Роботы используются в качестве образовательных помощников учителей. С 1980-х годов роботы, такие как черепахи, использовались в школах и программировались с использованием языка логотипов . [ 93 ] [ 94 ]
Существуют наборы роботов, такие как Lego Mindstorms , BIOLOID , OLLO от ROBOTIS или образовательные роботы BotBrain, которые могут помочь детям изучить математику, физику, программирование и электронику. Робототехника также была внедрена в жизнь учащихся младших и старших классов в виде соревнований роботов с компанией FIRST (За вдохновение и признание науки и технологий). Организация является основой для соревнований FIRST Robotics Competition , FIRST Tech Challenge , FIRST Lego League Challenge и FIRST Lego League Explore .
Были также такие роботы, как обучающий компьютер Leachim (1974). [ 95 ] Лихим был ранним примером синтеза речи с использованием метода синтеза дифона . 2-XL (1976) представлял собой игру / обучающую игрушку в форме робота, основанную на разветвлении между звуковыми дорожками на 8-дорожечном магнитофоне , оба изобретены Майклом Дж. Фриманом . [ 96 ] Позже 8-дорожечный формат был переведен на кассеты, а затем и на цифровой формат.
Модульный робот
Модульные роботы — это новое поколение роботов, предназначенное для увеличения использования роботов за счет модульной архитектуры. [ 97 ] Функциональность и эффективность модульного робота легче повысить по сравнению с обычными роботами. Эти роботы состоят из одного типа идентичных модулей, нескольких разных типов идентичных модулей или модулей одинаковой формы, которые различаются по размеру. Их архитектурная структура обеспечивает гиперизбыточность модульных роботов, поскольку они могут быть спроектированы с более чем 8 степенями свободы (DOF). Создание программирования, инверсной кинематики и динамики для модульных роботов сложнее, чем для традиционных роботов. Модульные роботы могут состоять из модулей L-образной формы, кубических модулей, а также модулей U- и H-образной формы. Технология ANAT, ранняя модульная робототехническая технология, запатентованная Robotics Design Inc., позволяет создавать модульных роботов из U- и H-образных модулей, которые соединяются в цепочку и используются для формирования гетерогенных и гомогенных модульных робототехнических систем. Эти «роботы ANAT» могут быть спроектированы с «n» степенями свободы, поскольку каждый модуль представляет собой полную моторизованную роботизированную систему, которая складывается относительно модулей, соединенных до и после него в своей цепочке, и, следовательно, один модуль допускает одну степень свободы. Чем больше модулей соединено друг с другом, тем больше степеней свободы он будет иметь. L-образные модули также могут быть спроектированы в виде цепочки, и они должны становиться все меньше по мере увеличения размера цепочки, поскольку полезная нагрузка, прикрепленная к концу цепочки, создает большую нагрузку на модули, находящиеся дальше от основания. H-образные модули ANAT не страдают от этой проблемы, так как их конструкция позволяет модульному роботу равномерно распределять давление и удары между другими прикрепленными модулями, и поэтому грузоподъемность не уменьшается с увеличением длины руки. Модульные роботы можно переконфигурировать вручную или самостоятельно, чтобы сформировать другого робота, который может выполнять различные приложения. Поскольку модульные роботы одного и того же типа архитектуры состоят из модулей, составляющих разных модульных роботов, робот со змеиной рукой может объединяться с другим, образуя робота с двумя или четырьмя руками, или может разделяться на несколько мобильных роботов, а мобильные роботы могут разделяться. на несколько меньших или объединиться с другими в более крупный или другой. Это позволяет одному модульному роботу полностью специализироваться на одной задаче, а также специализироваться на выполнении нескольких различных задач.
Модульные роботизированные технологии в настоящее время применяются в гибридном транспорте. [ 98 ] промышленная автоматизация, [ 99 ] очистка воздуховодов [ 100 ] и обработка. Многие исследовательские центры и университеты также изучили эту технологию и разработали прототипы.
Коллаборативные роботы
или Коллаборативный робот кобот — это робот, который может безопасно и эффективно взаимодействовать с людьми при выполнении простых промышленных задач. Однако рабочие органы и другие условия окружающей среды могут создавать опасности, поэтому перед использованием любого промышленного приложения для управления движением следует провести оценку риска. [ 101 ]
Коллаборативные роботы, наиболее широко используемые сегодня в промышленности, производятся компанией Universal Robots в Дании. [ 102 ]
Rethink Robotics , основанная Родни Бруксом , ранее работавшим в iRobot, представила Baxter в сентябре 2012 года; как промышленный робот, предназначенный для безопасного взаимодействия с соседними людьми-работниками и программируемый для выполнения простых задач. [ 103 ] Бакстеры останавливаются, если обнаруживают человека на пути своих роботизированных рук и имеют заметные выключатели. Предназначенные для продажи малому бизнесу, они позиционируются как роботизированный аналог персонального компьютера. [ 104 ] По состоянию на май 2014 г. [update]190 компаний в США купили Baxters, и они используются в коммерческих целях в Великобритании. [ 10 ]
Роботы в обществе

Примерно половина всех роботов в мире находится в Азии, 32% в Европе, 16% в Северной Америке, 1% в Австралазии и 1% в Африке. [ 107 ] 40% всех роботов в мире находятся в Японии, [ 108 ] что делает Японию страной с наибольшим количеством роботов.
Автономия и этические вопросы

Поскольку роботы становятся более продвинутыми и совершенными, эксперты и ученые все чаще исследуют вопросы о том, какая этика может регулировать поведение роботов. [ 110 ] [ 111 ] и смогут ли роботы претендовать на какие-либо социальные, культурные, этические или юридические права. [ 112 ] Одна научная группа заявила, что вполне возможно, что мозг робота появится к 2019 году. [ 113 ] Другие прогнозируют прорыв в области роботизированного интеллекта к 2050 году. [ 114 ] Последние достижения сделали поведение роботов более сложным. [ 115 ] Социальное влияние интеллектуальных роботов является предметом документального фильма 2010 года под названием Plug & Pray . [ 116 ]
Вернор Виндж предположил, что может наступить момент, когда компьютеры и роботы станут умнее людей. Он называет это « сингулярностью ». [ 117 ] Он предполагает, что это может быть в некоторой степени или, возможно, очень опасно для человека. [ 118 ] Это обсуждается философией под названием Сингуляритаризм .
В 2009 году эксперты посетили конференцию, организованную Ассоциацией по развитию искусственного интеллекта (AAAI), чтобы обсудить, смогут ли компьютеры и роботы обрести какую-либо автономию и насколько эти способности могут представлять угрозу или опасность. Они отметили, что некоторые роботы приобрели различные формы полуавтономности, в том числе способность самостоятельно находить источники энергии и возможность самостоятельно выбирать цели для атаки с помощью оружия. Они также отметили, что некоторые компьютерные вирусы могут уклоняться от уничтожения и обладают «тараканьим интеллектом». Они отметили, что самосознание, изображенное в научной фантастике, вероятно, маловероятно, но существуют и другие потенциальные опасности и ловушки. [ 117 ] Различные источники средств массовой информации и научные группы отмечают отдельные тенденции в разных областях, которые в совокупности могут привести к увеличению функциональных возможностей и автономности роботов и которые вызывают определенные опасения. [ 119 ] [ 120 ] [ 121 ]
Военные роботы
Некоторые эксперты и ученые ставят под сомнение использование роботов в боевых действиях, особенно когда таким роботам предоставляется определенная степень автономных функций. [ 122 ] Существуют также опасения по поводу технологий, которые могут позволить управлять некоторыми вооруженными роботами главным образом другими роботами. [ 123 ] ВМС США профинансировали отчет, в котором указывается, что по мере того, как военные роботы становятся все более сложными, следует уделять больше внимания последствиям их способности принимать автономные решения. [ 124 ] [ 125 ] Один исследователь утверждает, что автономные роботы могут быть более гуманными, поскольку смогут более эффективно принимать решения. Однако другие эксперты сомневаются в этом. [ 126 ]
В частности, один робот, EATR , вызвал обеспокоенность общественности. [ 127 ] над источником топлива, поскольку он может постоянно дозаправляться, используя органические вещества. [ 128 ] Хотя двигатель ЕТР рассчитан на работу на биомассе и растительности [ 129 ] Специально выбранный с помощью датчиков, которые он может найти на полях сражений или в других местных средах, проект заявил, что куриный жир также может быть использован. [ 130 ]
Мануэль Де Ланда отметил, что «умные ракеты» и автономные бомбы, оснащенные искусственным восприятием, можно считать роботами, поскольку часть своих решений они принимают автономно. Он считает, что это представляет собой важную и опасную тенденцию, при которой люди передают важные решения машинам. [ 131 ]
Связь с безработицей
На протяжении веков люди предсказывали, что машины сделают рабочих устаревшими и повысят безработицу , хотя обычно считается, что причины безработицы связаны с социальной политикой. [ 132 ] [ 133 ] [ 134 ]
Недавний пример замены людей связан с тайваньской технологической компанией Foxconn , которая в июле 2011 года объявила о трехлетнем плане по замене рабочих большим количеством роботов. В настоящее время компания использует десять тысяч роботов, но в течение трех лет увеличит их количество до миллиона. [ 135 ]
Юристы предполагают, что увеличение распространенности роботов на рабочих местах может привести к необходимости усовершенствования законов о сокращении штатов. [ 136 ]
Кевин Дж. Делани сказал: «Роботы отнимают человеческие рабочие места. Но Билл Гейтс считает, что правительства должны облагать налогом их использование компаниями, чтобы хотя бы временно замедлить распространение автоматизации и финансировать другие виды занятости». [ 137 ] Налог на роботов также поможет выплатить гарантированный прожиточный минимум уволенным работникам.
за 2019 год» Всемирного банка В «Докладе о мировом развитии приводятся доказательства того, что, хотя автоматизация вытесняет рабочих, технологические инновации в итоге создают больше новых отраслей и рабочих мест. [ 138 ]
Современное использование

В настоящее время существует два основных типа роботов в зависимости от их использования: автономные роботы общего назначения и специализированные роботы.
Роботы можно классифицировать по специфике назначения. Робот может быть спроектирован так, чтобы очень хорошо выполнять одну конкретную задачу или менее хорошо выполнять ряд задач. Все роботы по своей природе могут быть перепрограммированы на другое поведение, но некоторые из них ограничены своей физической формой. Например, заводской робот-манипулятор может выполнять такие работы, как резка, сварка, склеивание или выполнять функции ярмарочного аттракциона, в то время как робот-переборщик может только заполнять печатные платы.
Автономные роботы общего назначения
Автономные роботы общего назначения могут самостоятельно выполнять различные функции. Автономные роботы общего назначения обычно могут самостоятельно перемещаться в известных пространствах, обеспечивать собственные потребности в подзарядке, взаимодействовать с электронными дверями и лифтами и выполнять другие основные задачи. Как и компьютеры, роботы общего назначения могут подключаться к сетям, программному обеспечению и аксессуарам, которые повышают их полезность. Они могут узнавать людей или объекты, разговаривать, поддерживать общение, следить за качеством окружающей среды, реагировать на сигналы тревоги, подбирать припасы и выполнять другие полезные задачи. Роботы общего назначения могут выполнять множество функций одновременно или брать на себя разные роли в разное время суток. Некоторые такие роботы пытаются имитировать людей и даже могут напоминать людей внешне; этот тип робота называется роботом-гуманоидом. Роботы-гуманоиды все еще находятся на очень ограниченной стадии, поскольку ни один робот-гуманоид пока не может фактически перемещаться по комнате, в которой он никогда не был. [ 139 ] Таким образом, роботы-гуманоиды на самом деле весьма ограничены, несмотря на их разумное поведение в хорошо известных средах.
Заводские роботы
Производство автомобилей
За последние три десятилетия на автомобильных заводах стали доминировать роботы. Типичная фабрика содержит сотни промышленных роботов, работающих на полностью автоматизированных производственных линиях, по одному роботу на каждые десять рабочих. На автоматизированной производственной линии шасси автомобиля на конвейере сваривается , склеивается , красится и окончательно собирается на нескольких роботизированных станциях.
Упаковка
Промышленные роботы также широко используются для паллетирования и упаковки промышленных товаров, например, для быстрого снятия картонных коробок с напитками с конца конвейерной ленты и помещения их в коробки или для загрузки и разгрузки обрабатывающих центров.
Электроника
массового производства Печатные платы почти исключительно производятся роботами-переборщиками, обычно с помощью манипуляторов SCARA , которые удаляют крошечные электронные компоненты из полос или лотков и с большой точностью размещают их на печатных платах. [ 140 ] Такие роботы могут размещать сотни тысяч компонентов в час, значительно превосходя человека по скорости, точности и надежности. [ 141 ]
Автоматизированные управляемые транспортные средства (AGV)

Мобильные роботы, следящие за маркерами или проводами на полу или использующие зрение [ 86 ] или лазеры используются для транспортировки товаров вокруг крупных объектов, таких как склады, контейнерные порты или больницы. [ 142 ]
Ранние роботы в стиле AGV
Ограничено задачами, которые можно было точно определить и которые нужно было каждый раз выполнять одинаково. Требовалось очень мало обратной связи или интеллекта, а роботам требовались только самые простые экстерорецепторы (сенсоры). Ограничения этих AGV заключаются в том, что их пути нелегко изменить, и они не могут изменить свои пути, если их блокируют препятствия. Если один AGV выйдет из строя, это может остановить всю работу.
Временные технологии AGV
Разработан для использования триангуляции от маяков или сеток штрих-кодов для сканирования на полу или потолке. На большинстве заводов системы триангуляции, как правило, требуют умеренного или серьезного обслуживания, например ежедневной очистки всех маяков или штрих-кодов. Кроме того, если высокий поддон или большое транспортное средство блокирует маяки или испорчен штрих-код, AGV может потеряться. Часто такие AGV предназначены для использования в условиях, свободных от людей.
Интеллектуальные AGV (i-AGV)
Такие как SmartLoader, [ 143 ] SpeciMinder, [ 144 ] АДАМ, [ 145 ] Буксир [ 146 ] Eskorta, [ 147 ] и MT 400 с Motivity [ 148 ] предназначены для создания удобных для людей рабочих мест. Они ориентируются, распознавая природные особенности. 3D-сканеры или другие средства измерения окружающей среды в двух или трех измерениях помогают устранить совокупные ошибки при расчете текущего положения AGV. Некоторые AGV могут создавать карты окружающей среды с помощью сканирующих лазеров с одновременной локализацией и картографированием (SLAM) и использовать эти карты для навигации в реальном времени с другими алгоритмами планирования пути и обхода препятствий. Они способны работать в сложных средах и выполнять неповторяющиеся и непоследовательные задачи, такие как транспортировка фотошаблонов в полупроводниковой лаборатории, образцов в больницах и товаров на складах. Для динамичных площадей, таких как склады, полные поддонов, AGV требуют дополнительных стратегий с использованием трехмерных датчиков, таких как времяпролетные или стереовизионные камеры.
Грязные, опасные, скучные или недоступные задачи
Есть много работ, которые люди предпочли бы оставить роботам. Работа может быть скучной, например, уборка дома или разметка спортивных площадок , или опасной, например исследование вулкана . [ 149 ] Другие работы физически недоступны, например, исследование другой планеты , [ 150 ] очистка внутренней части длинной трубы или выполнение лапароскопической операции. [ 151 ]
Космические зонды
Почти каждый когда-либо запущенный беспилотный космический зонд был роботом. [ 152 ] [ 153 ] Некоторые из них были запущены в 1960-х годах с очень ограниченными возможностями, но их способность летать и приземляться (в случае с «Луной-9 ») является показателем их статуса робота. Сюда входят , среди прочего, зонды «Вояджер» и зонды «Галилео».
Телеробот

Телеуправляемые роботы или телероботы — это устройства, управляемые человеком-оператором на расстоянии, а не выполняющие заданную последовательность движений, но имеющие полуавтономное поведение. Они используются, когда человек не может присутствовать на объекте для выполнения работы из-за того, что он опасен, находится далеко или недоступен. Робот может находиться в другой комнате или другой стране или может иметь совсем другой масштаб, чем оператор. Например, робот для лапароскопической хирургии позволяет хирургу работать внутри пациента в относительно небольших масштабах по сравнению с открытой операцией, что значительно сокращает время восстановления. [ 151 ] Их также можно использовать, чтобы не подвергать работников воздействию опасных и ограниченных пространств, например, при очистке воздуховодов . При обезвреживании бомбы оператор отправляет небольшого робота, чтобы обезвредить ее. Несколько авторов использовали устройство под названием Longpen для удаленной подписи книг. [ 154 ] Predator Самолеты-роботы с телеуправлением, такие как беспилотный летательный аппарат , все чаще используются военными. Эти беспилотные дроны могут исследовать местность и вести огонь по целям. [ 155 ] [ 156 ] Сотни роботов, таких как iRobot от Packbot и Foster-Miller TALON, используются военными США в Афганистане для обезвреживания Ираке и придорожных бомб или самодельных взрывных устройств (СВУ) в рамках деятельности, известной как обезвреживание боеприпасов (EOD). [ 157 ]
Автоматизированные машины для сбора фруктов
Роботы используются для автоматизации сбора фруктов в садах с меньшими затратами, чем сборщики-люди.
Домашние роботы

Домашние роботы — это простые роботы, предназначенные для выполнения одной задачи в домашних условиях. Их используют в простых, но часто нелюбимых работах, таких как уборка пылесосом , мытье полов и стрижка газонов . Пример домашнего робота — Roomba .
Военные роботы
К военным роботам относится робот SWORDS , который в настоящее время используется в наземных боях. Он может использовать разнообразное оружие, и ведутся дискуссии о предоставлении ему некоторой степени автономии в ситуациях на поле боя. [ 158 ] [ 159 ] [ 160 ]
Беспилотные боевые летательные аппараты (БПЛА), представляющие собой модернизированную форму БПЛА , могут выполнять самые разнообразные задачи, в том числе боевые. Разрабатываются БПЛА, такие как BAE Systems Mantis , которые смогут летать самостоятельно, выбирать собственный курс и цель и самостоятельно принимать большинство решений. [ 161 ] BAE Taranis — это БПЛА, построенный в Великобритании, который может летать через континенты без пилота и имеет новые средства, позволяющие избежать обнаружения. [ 162 ] Ожидается, что летные испытания начнутся в 2011 году. [ 163 ]
AAAI . глубоко изучила эту тему [ 110 ] и ее президент заказал исследование для изучения этого вопроса. [ 164 ]
Некоторые полагают, что необходимо создать « Дружественный ИИ », а это означает, что достижения, которые уже происходят в области ИИ, должны также включать усилия по созданию ИИ по своей сути дружелюбным и гуманным. [ 165 ] Сообщается, что несколько таких мер уже существуют в странах с большим количеством роботов, таких как Япония и Южная Корея. [ 166 ] начав принимать правила, требующие, чтобы роботы были оснащены системами безопасности, и, возможно, сводом «законов», подобных трем законам робототехники Азимова . [ 167 ] [ 168 ] Официальный отчет был опубликован в 2009 году Комитетом по политике в области робототехники при правительстве Японии. [ 169 ] Китайские официальные лица и исследователи опубликовали отчет, предлагающий набор этических правил и набор новых юридических руководящих принципов, получивших название «Правовые исследования роботов». [ 170 ] Была выражена некоторая обеспокоенность по поводу возможного появления роботов, говорящих очевидную ложь. [ 171 ]
Горные роботы
Горные роботы предназначены для решения ряда проблем, с которыми в настоящее время сталкивается горнодобывающая промышленность, включая нехватку квалифицированных кадров, повышение производительности за счет снижения содержания руды и достижение экологических целей. Из-за опасного характера горных работ, в частности подземных горных работ , в последнее время значительно возросло распространение автономных, полуавтономных и телеуправляемых роботов. Ряд производителей транспортных средств предоставляют автономные поезда, грузовики и погрузчики , которые будут загружать материал, транспортировать его по руднику к месту назначения и разгружать, не требуя вмешательства человека. Одна из крупнейших в мире горнодобывающих корпораций Rio Tinto недавно расширила свой парк автономных грузовиков до крупнейшего в мире, состоящего из 150 автономных грузовиков Komatsu , работающих в Западной Австралии . [ 172 ] Аналогичным образом, BHP объявила о расширении своего парка автономных буровых установок до 21 крупнейшей в мире автономной буровой установки Atlas Copco . [ 173 ]
Буровые, очистные и камнедробильные машины теперь также доступны в виде автономных роботов. [ 174 ] Система управления буровой установкой Atlas Copco может автономно выполнять план бурения на буровой установке , перемещая буровую установку в нужное положение с помощью GPS, настраивая буровую установку и буря до заданной глубины. [ 175 ] Аналогичным образом, система Transmin Rocklogic может автоматически планировать путь для размещения камнелома в выбранном пункте назначения. [ 176 ] Эти системы значительно повышают безопасность и эффективность горнодобывающих работ.
Здравоохранение
Роботы в здравоохранении выполняют две основные функции. Те, которые помогают отдельному человеку, например, страдающему таким заболеванием, как рассеянный склероз, и те, которые помогают общим системам, таким как аптеки и больницы.
Домашняя автоматизация для пожилых людей и инвалидов
Роботы, используемые в домашней автоматизации, со временем превратились из простых базовых роботов-помощников, таких как Handy 1 , [ 177 ] вплоть до полуавтономных роботов, таких как FRIEND , которые могут помогать пожилым людям и людям с ограниченными возможностями выполнять обычные задачи.
Население стареет во многих странах, особенно в Японии, а это означает, что растет число пожилых людей, о которых нужно заботиться, но относительно меньше молодых людей, о которых нужно заботиться. [ 178 ] [ 179 ] Люди являются лучшими помощниками по уходу, но там, где они недоступны, постепенно внедряются роботы. [ 180 ]
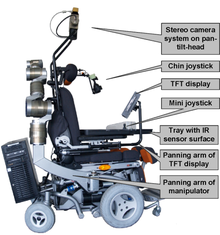
FRIEND — это полуавтономный робот, предназначенный для помощи людям с ограниченными возможностями и пожилым людям в их повседневной жизни, например, в приготовлении и подаче еды. FRIEND позволяет пациентам с параличом нижних конечностей , мышечными заболеваниями или серьезными параличами (в результате инсульта и т. д.) выполнять задачи без помощи других людей, таких как терапевты или медперсонал.
Аптеки
Этот раздел нуждается в дополнительных цитатах для проверки . ( Июль 2009 г. ) |
Script Pro производит робота, призванного помогать аптекам выписывать рецепты, состоящие из твердых веществ для перорального приема или лекарств в форме таблеток. [ 181 ] [ нужен лучший источник ] Фармацевт или фармацевтический техник вводит информацию о рецепте в свою информационную систему. Система, определив, есть ли препарат в роботе, отправит информацию роботу для заполнения. Робот имеет 3 флакона разного размера, которые можно заполнить в зависимости от размера таблетки. Техник-робот, пользователь или фармацевт определяет необходимый размер флакона на основе планшета, когда робот находится на складе. После наполнения флакона он подается на конвейерную ленту, которая доставляет его к держателю, который вращает флакон и прикрепляет этикетку для пациента. После этого он устанавливается на другой конвейер, который доставляет флакон с лекарством пациента в слот, обозначенный именем пациента на светодиодном индикаторе. Затем фармацевт или технический специалист проверяет содержимое флакона, чтобы убедиться, что это препарат, подходящий конкретному пациенту, а затем запечатывает флаконы и отправляет их забрать.
Robot RX от McKesson — еще один роботизированный продукт в сфере здравоохранения, который помогает аптекам ежедневно выдавать тысячи лекарств практически без ошибок. [ 182 ] Робот может иметь ширину десять футов и длину тридцать футов и может вмещать сотни различных видов лекарств и тысячи доз. Аптека экономит много ресурсов, таких как сотрудники, которые в противном случае были бы недоступны в отрасли с дефицитом ресурсов. В нем используется электромеханическая головка в сочетании с пневматической системой для захвата каждой дозы и доставки ее либо к месту хранения, либо к месту выдачи. Головка движется вдоль одной оси и поворачивается на 180 градусов, чтобы вытягивать лекарства. Во время этого процесса он использует технологию штрих-кода , чтобы убедиться, что он извлекает правильный препарат. Затем он доставляет лекарство в контейнер для конкретного пациента на конвейерной ленте. Как только контейнер заполняется всеми лекарствами, необходимыми конкретному пациенту и которые есть в наличии у робота, контейнер освобождается и возвращается на конвейерную ленту к технику, ожидающему загрузки его в тележку для доставки на этаж.
Исследовательские роботы
разрабатывается множество новых типов роботов Хотя сегодня большинство роботов устанавливаются на заводах или в домах, выполняя трудовые или спасательные работы, в лабораториях по всему миру . Большая часть исследований в области робототехники сосредоточена не на конкретных промышленных задачах, а на исследованиях новых типов роботов, альтернативных способов мышления или проектирования роботов, а также новых способов их производства. Ожидается, что эти новые типы роботов смогут решать проблемы реального мира, когда они наконец будут реализованы. [ нужна ссылка ]
Бионические и биомиметические роботы
Один из подходов к созданию роботов — создать их на основе животных. BionicKangaroo был разработан и создан путем изучения и применения физиологии и методов передвижения кенгуру.
Нанороботы
Наноробототехника — это новая технологическая область создания машин или роботов, компоненты которых имеют размер микроскопического масштаба нанометра или близкий к нему (10 −9 метров). Также известные как «наноботы» или «наниты», они будут построены из молекулярных машин . До сих пор исследователи в основном создавали только части этих сложных систем, такие как подшипники, датчики и синтетические молекулярные двигатели , но были созданы и функционирующие роботы, такие как участники конкурса Nanobot Robocup. [ 183 ] Исследователи также надеются, что смогут создавать целых роботов размером с вирусы или бактерии, которые смогут выполнять задачи в крошечных масштабах. Возможные применения включают микрохирургию (на уровне отдельных клеток ), туман , [ 184 ] производство, вооружение и уборка. [ 185 ] Некоторые люди предполагают, что если бы существовали нанороботы, которые могли бы размножаться, земля превратилась бы в « серую слизь », в то время как другие утверждают, что этот гипотетический результат — нонсенс. [ 186 ] [ 187 ]
Реконфигурируемые роботы
Несколько исследователей исследовали возможность создания роботов, которые могут изменять свою физическую форму для выполнения конкретной задачи. [ 188 ] как вымышленный Т-1000 . Однако настоящие роботы далеко не так сложны и в основном состоят из небольшого количества блоков кубической формы, которые могут перемещаться относительно своих соседей. Алгоритмы были разработаны на случай, если такие роботы станут реальностью. [ 189 ]
Роботизированные операторы мобильных лабораторий
В июле 2020 года ученые сообщили о разработке мобильного робота-химика и продемонстрировали, что он может помочь в экспериментальных поисках. По словам ученых, их стратегия заключалась в автоматизации исследователя, а не инструментов, что освобождало время исследователям-людям для творческого мышления, и позволяло идентифицировать смеси фотокатализаторов для производства водорода из воды, которые были в шесть раз более активными, чем первоначальные составы. Модульный робот может управлять лабораторными приборами, работать практически круглосуточно и автономно принимать решения о своих дальнейших действиях в зависимости от результатов экспериментов. [ 190 ] [ 191 ]
Мягкотелые роботы
Роботы с силиконовыми телами и гибкими приводами ( воздушные мышцы , электроактивные полимеры и феррожидкости ) выглядят и ощущаются иначе, чем роботы с жестким скелетом, и могут вести себя по-разному. [ 192 ] Мягкие, гибкие (а иногда даже мягкие) роботы часто проектируются так, чтобы имитировать биомеханику животных и других существ, встречающихся в природе, что приводит к новым применениям в медицине, уходе, поиске и спасении, обработке и производстве пищевых продуктов, а также научных исследованиях. . [ 193 ] [ 194 ]
Рои роботов
Вдохновленные колониями насекомых, таких как муравьи и пчелы , исследователи моделируют поведение стаи тысяч крошечных роботов, которые вместе выполняют полезную задачу, например, находят что-то спрятанное, убирают или шпионят. Каждый робот довольно прост, но возникающее поведение роя более сложное. Всю совокупность роботов можно рассматривать как одну распределенную систему, точно так же, как колонию муравьев можно считать суперорганизмом , обладающим роевым интеллектом . К крупнейшим созданным на данный момент роям относятся рой iRobot и проект SRI/MobileRobots CentiBots. [ 195 ] и рой проекта микророботов с открытым исходным кодом, который используется для исследования коллективного поведения. [ 196 ] [ 197 ] Рои также более устойчивы к сбоям. В то время как один большой робот может потерпеть неудачу и разрушить миссию, рой может продолжить работу, даже если несколько роботов потерпят неудачу. Это может сделать их привлекательными для миссий по исследованию космоса, где неудача обычно обходится чрезвычайно дорого. [ 198 ]
Роботы с тактильным интерфейсом
Робототехника также находит применение при разработке интерфейсов виртуальной реальности . Специализированные роботы широко используются в исследовательском сообществе, занимающемся тактильными ощущениями . Эти роботы, называемые «тактильными интерфейсами», позволяют пользователю сенсорно взаимодействовать с реальной и виртуальной средой. Роботизированные силы позволяют моделировать механические свойства «виртуальных» объектов, которые пользователи могут ощущать посредством осязания . [ 199 ]
Современное искусство и скульптура
Роботы используются современными художниками для создания произведений, включающих механическую автоматизацию. Существует множество ветвей роботизированного искусства, одной из которых является искусство роботизированной инсталляции , тип искусства инсталляции , который запрограммирован реагировать на взаимодействия со зрителем с помощью компьютеров, датчиков и исполнительных механизмов. Таким образом, будущее поведение таких инсталляций может быть изменено вкладом художника или участника, что отличает эти произведения искусства от других типов кинетического искусства .
Le Grand Palais в Париже организовал выставку «Художники и роботы», на которой были представлены произведения более сорока художников, созданные с помощью роботов в 2018 году. [ 200 ]
Роботы в популярной культуре

Литература
Роботизированные персонажи, андроиды (искусственные мужчины/женщины) или гиноиды (искусственные женщины) и киборги (также « бионические мужчины/женщины» или люди со значительными механическими усовершенствованиями) стали основными продуктами научной фантастики.
Первое упоминание в западной литературе механических слуг появляется в Гомера » «Илиаде . В XVIII книге Гефест , бог огня, создает новые доспехи для героя Ахилла с помощью роботов. [ 201 ] Согласно переводу Рье , «Золотые служанки поспешили на помощь своему хозяину. Они выглядели как настоящие женщины и могли не только говорить и пользоваться своими конечностями, но были наделены разумом и обучены ручному труду бессмертными богами». Для их описания не используются слова «робот» или «андроид», но, тем не менее, они представляют собой механические устройства, похожие на людей. «Слово «Робот» впервые использовалось в пьесе Карела Чапека RUR (Универсальные роботы Россума) (написанной в 1920 году)». Писатель Карел Чапек родился в Чехословакии (Чехия).
Возможно, самым плодовитым автором двадцатого века был Айзек Азимов (1920–1992). [ 202 ] опубликовавший более пятисот книг. [ 203 ] Азимова, вероятно, больше всего помнят за его научно-фантастические рассказы, особенно о роботах, где он поместил роботов и их взаимодействие с обществом в центр многих своих работ. [ 204 ] [ 205 ] Азимов тщательно рассмотрел проблему идеального набора инструкций, которые можно было бы дать роботам, чтобы снизить риск для людей, и пришел к своим трем законам робототехники : робот не может причинить вред человеку или своим бездействием позволить человеку прийти. причинить вред; робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому Закону; и робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону. [ 206 ] Они были представлены в его рассказе 1942 года «Обход», хотя и предвещались в нескольких более ранних рассказах. Позже Азимов добавил Нулевой закон: «Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинен вред»; остальные законы последовательно изменяются, чтобы признать это.
Согласно Оксфордскому словарю английского языка, первый отрывок рассказа Азимова « Лжец! » (1941), в котором упоминается Первый закон, является самым ранним зарегистрированным использованием слова «робототехника» . Азимов изначально не знал об этом; он предполагал, что это слово уже существовало по аналогии с механикой, гидравликой и другими подобными терминами, обозначающими отрасли прикладного знания. [ 207 ]
Соревнования роботов
Роботы используются во многих соревновательных мероприятиях. Соревнования по боям роботов были популяризированы телевизионными шоу, такими как Robot Wars и BattleBots , в которых участвуют в основном дистанционно управляемые «роботы», которые соревнуются друг с другом напрямую, используя различное вооружение. Существуют также любительские лиги боевых роботов, действующие по всему миру за пределами телевизионных мероприятий. Мероприятия Micromouse , в которых автономные роботы соревнуются в преодолении лабиринтов или других полос препятствий, также проводятся на международном уровне.
Соревнования роботов также часто используются в образовательных учреждениях для ознакомления детей с концепцией робототехники, например, ПЕРВЫЕ соревнования по робототехнике в США.
Фильмы
Роботы появляются во многих фильмах. Большинство роботов в кино вымышлены. Двумя наиболее известными являются R2-D2 и C-3PO из франшизы «Звездные войны» .
Секс-роботы
Концепция гуманоидных секс-роботов привлекла внимание общественности и вызвала споры относительно их предполагаемых преимуществ и потенциального воздействия на общество. Оппоненты утверждают, что внедрение таких устройств было бы социально вредным и унизительным для женщин и детей. [ 208 ] в то время как сторонники ссылаются на их потенциальную терапевтическую пользу, особенно в помощи людям с деменцией или депрессией . [ 209 ]
Проблемы, изображенные в популярной культуре
Страхи и опасения по поводу роботов неоднократно выражались в самых разных книгах и фильмах. Общей темой является развитие высшей расы сознательных и высокоинтеллектуальных роботов, стремящихся захватить или уничтожить человеческую расу. «Франкенштейн» (1818), который часто называют первым научно-фантастическим романом, стал синонимом темы робота или андроида, превосходящего своего создателя.
Другие работы на подобные темы включают «Механический человек» , «Терминатор» , «Беглец » , «Робокоп» , « Репликаторы в «Звездных вратах » , «Сайлоны в «Звездном крейсере Галактика» , «Киберлюди и далековы в «Докторе Кто» , «Матрица» , «Энтиран» и «Я, робот» . Некоторые вымышленные роботы запрограммированы убивать и разрушать; другие обретают сверхчеловеческий интеллект и способности, модернизируя собственное программное и аппаратное обеспечение. Примерами популярных СМИ, где робот становится злом, являются «2001: Космическая одиссея» , «Красная планета» и «Энтиран» .
Игра Horizon Zero Dawn 2017 года исследует темы робототехники в войне, этики роботов и проблемы управления ИИ , а также положительное или отрицательное влияние, которое такие технологии могут оказать на окружающую среду.
Еще одна распространенная тема — реакция, которую иногда называют « жуткой долиной », беспокойства и даже отвращения при виде роботов, которые слишком точно имитируют людей. [ 109 ]
Совсем недавно вымышленные изображения роботов с искусственным интеллектом в таких фильмах, как «Искусственный интеллект ИИ» и «Из машины» , а также в телеадаптации «Мира Дикого Запада» 2016 года вызвали симпатию аудитории к самим роботам.
См. также
Конкретные концепции робототехники
- Передвижение робота
- Одновременная локализация и картографирование
- Тактильный датчик
- Телеоперация
- Зловещая долина
- машина фон Неймана
- Проблема с роботом-будильником
- Нейроморфная инженерия
Методы и категории робототехники
- Когнитивная робототехника
- Робот-компаньон
- Домашний робот
- Эпигенетическая робототехника
- Эволюционная робототехника
- Гуманоидный робот
- Автономный робот
- Роевая робототехника
- Микроботика
- Управление роботом
Конкретные роботы и устройства
- АЙБО
- Автономный дрон-корабль космодрома
- Беспилотный автомобиль
- Дружественная робототехника
- Семья Лели Юнона
- Робот для обработки жидкостей
- Паро (робот)
- ПатрульБот
- РобоБи
- я становлюсь сильнее
- Магазин приложений для роботов
Другие статьи по теме
Дальнейшее чтение
- Аль-Аршани, Сара (29 ноября 2021 г.). «Исследователи первого в мире живого робота нашли способ заставить его воспроизводиться, придав ему форму Pac-Man» . Бизнес-инсайдер .
- Посмотрите наброски этого гуманоидного робота-художника с глазу на глаз (CNN, Видео, 2019)
- Марголиус, Иван. «Пражский робот», Информационный бюллетень «Друзья чешского наследия» №. 17, осень 2017 г., стр. 3–6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf.
- Глейзер, Хорст Альберт и Россбах, Сабина: Искусственный человек, Франкфурт / М., Берн, Нью-Йорк, 2011 «Трагическая история».
- Гуткинд, Л . (2006). Почти человек: заставить роботов думать . Нью-Йорк: WW Norton & Company, Inc.
- Крейг, Джей-Джей (2005). Введение в робототехнику , Пирсон Прентис Холл. Река Аппер-Сэдл, штат Нью-Джерси.
- Цай, Л.В. (1999). Анализ роботов . Уайли. Нью-Йорк.
- Сотбис Нью-Йорк. Коллекция жестяных игрушечных роботов Мэтта Уайза (1996)
- ДеЛанда, Мануэль . Война в эпоху интеллектуальных машин . 1991. Поворот. Нью-Йорк.
- Нидхэм, Джозеф (1986). Наука и цивилизация в Китае : Том 2 . Тайбэй: Caves Books Ltd.
- Чейни, Маргарет [1989:123] (1981). Тесла, Человек вне времени . Дорсет Пресс. Нью-Йорк. ISBN 0-88029-419-1
- Чапек, Карел (1920). руб. , Авентинум, Прага.
- Серия статей TechCast, Джейсон Рупински и Ричард Микс, «Отношение общественности к Android: пол роботов, задачи и цены»
Ссылки
- ^ «Четвероногий робот «Гепард» установил новый рекорд скорости» . Рейтер. 6 марта 2012 года. Архивировано из оригинала 22 октября 2013 года . Проверено 5 октября 2013 г.
- ^ Определение слова «робот». Оксфордский словарь английского языка. Проверено 27 ноября 2016 г.
- ^ «Прогнозы – обзор рынка беспилотных автомобилей» . driverless-future.com . Проверено 26 сентября 2023 г.
- ^ Jump up to: а б «робототехника» . Оксфордские словари. Архивировано из оригинала 18 мая 2011 года . Проверено 4 февраля 2011 г.
- ^ Марголиус, Иван (осень 2017 г.). «Пражский робот» (PDF) . Друзья чешского наследия (17): 3–6. Архивировано (PDF) из оригинала 11 сентября 2017 года.
- ^ Jump up to: а б с Зунт, Доминик. «Кто на самом деле изобрел слово «робот» и что оно означает?» . Сайт Карела Чапека. Архивировано из оригинала 4 февраля 2012 года . Проверено 11 сентября 2007 г.
- ^ Курфесс, Томас Р. (1 января 2005 г.). Справочник по робототехнике и автоматизации . Тейлор и Фрэнсис. ISBN 978-0-8493-1804-7 . Архивировано из оригинала 4 декабря 2016 года . Проверено 5 июля 2016 г. - через Google Книги.
- ^ Пирс, Джереми (15 августа 2011 г.). «Джордж К. Девол, изобретатель робота-манипулятора, умер в возрасте 99 лет» . Нью-Йорк Таймс . Архивировано из оригинала 25 декабря 2016 года . Проверено 7 февраля 2012 г.
В 1961 году General Motors поставила первый рычаг Unimate на сборочную линию на заводе компании в Юинг-Тауншип, штат Нью-Джерси, пригороде Трентона. Устройство использовалось для подъема и укладки литых под давлением металлических деталей, извлеченных из форм в горячем виде.
- ^ Акинс, Кристал. «5 рабочих мест заменяются роботами» . Эксель . Монстр. Архивировано из оригинала 24 апреля 2013 года . Проверено 15 апреля 2013 г.
- ^ Jump up to: а б Хой, Грег (28 мая 2014 г.). «Роботы могут стоить австралийской экономике 5 миллионов рабочих мест, предупреждают эксперты, поскольку компании стремятся сократить расходы» . Новости АВС . Австралийская радиовещательная корпорация . Архивировано из оригинала 29 мая 2014 года . Проверено 29 мая 2014 г.
- ^ «Телеком-словарь «бот» » . Альянс телекоммуникационных решений. 26 сентября 2023 г.
- ^ Полк, Игорь (16 ноября 2005 г.). «Виртуальный тур по выставке роботов RoboNexus 2005» . Выставка Robonexus 2005. Архивировано из оригинала 12 августа 2007 года . Проверено 10 сентября 2007 г.
- ^ Харрис, Том (16 апреля 2002 г.). «Как работают роботы» . Как все работает. Архивировано из оригинала 26 августа 2007 года . Проверено 10 сентября 2007 г.
- ^ Jump up to: а б с Нидэм, Джозеф (1991). Наука и цивилизация в Китае: Том 2, История научной мысли . Издательство Кембриджского университета. ISBN 978-0-521-05800-1 .
- ^ Карри, Адам (1999). «История робототехники» . Архивировано из оригинала 18 июля 2006 года . Проверено 10 сентября 2007 г.
- ^ Ноябрь. К. Л. 10
- ^ Jump up to: а б Нидэм, Том 2, 54.
- ^ Дебора Левин Гера (2003). Древнегреческие идеи о речи, языке и цивилизации . Издательство Оксфордского университета. ISBN 978-0-19-925616-7 . Архивировано из оригинала 5 декабря 2016 года . Проверено 25 сентября 2016 г.
- ^ Jump up to: а б с Рошайм, Марк Э. (1994). Эволюция роботов: развитие антропотехники . Вайли-IEEE. ISBN 0-471-02622-0 .
- ^ " «Роботы тогда и сейчас» . Би-би-си . 22 июля 2004 г. Архивировано из оригинала 20 декабря 2010 г.
- ^ О'Коннор, Джей-Джей и Э.Ф. Робертсон. «Биография цапли» . Архив истории математики MacTutor . Проверено 26 сентября 2023 г.
- ^ Стронг, Дж. С. (2007). Реликвии Будды . Издательство Принстонского университета . стр. 133–134, 143. ISBN. 978-0-691-11764-5 .
- ^ Фаулер, Чарльз Б. (октябрь 1967 г.). «Музей музыки: история механических инструментов». Журнал музыкальных педагогов . 54 (2): 45–49. дои : 10.2307/3391092 . ISSN 0027-4321 . JSTOR 3391092 . S2CID 190524140 .
- ^ «Ранние часы» . Прогулка во времени . Физическая лаборатория НИСТ. 12 августа 2009 года . Проверено 13 октября 2022 г.
- ^ Jump up to: а б «Программируемый робот Древней Греции» . Новый учёный : 32–35. 6 июля 2007 г.
- ^ Варадпанде, Манохар Лаксман (1987). История индийского театра, Том 1 . Публикации Абхинава. п. 68. ИСБН 978-81-7017-221-5 .
- ^ Вуястик, Доминик (2003). Корни Аюрведы: отрывки из санскритских медицинских сочинений . Пингвин. п. 222. ИСБН 978-0-14-044824-5 .
- ^ Нидэм, Джозеф (1965). Наука и цивилизация в Китае: Том 4, Физика и физические технологии, Часть 2, Машиностроение . Издательство Кембриджского университета. п. 164. ИСБН 978-0-521-05803-2 .
- ^ Jump up to: а б «Аль-Джазари | Арабский изобретатель» . Британская энциклопедия . Проверено 15 июня 2019 г.
- ^ Говард Р. Тернер (1997). Наука в средневековом исламе: иллюстрированное введение . Издательство Техасского университета . п. 81. ИСБН 0-292-78149-0 .
- ^ Хилл, Дональд (май 1991 г.). «Машиностроение на Средневековом Ближнем Востоке». Научный американец . стр. 64–69. ( см. Хилл, Дональд . «История наук в исламском мире» . IX. Машиностроение. Архивировано из оригинала 25 декабря 2007 года .)
- ^ Древние открытия. Исламская наука. Часть1 . Архивировано из оригинала 11 декабря 2021 года . Проверено 15 июня 2019 г.
- ^ Моран, Мэн (декабрь 2006 г.). «Робот да Винчи». Дж. Эндурол . 20 (12): 986–90. дои : 10.1089/конец.2006.20.986 . ПМИД 17206888 .
... датой проектирования и возможной постройки этого робота был 1495 год... Начиная с 1950-х годов исследователи Калифорнийского университета начали размышлять о значении некоторых отметок да Винчи на том, что казалось техническими чертежами.. Сейчас известно, что робот да Винчи имел внешний вид германского рыцаря.
- ^ Труитт, ER (2015). Средневековые роботы: механизм, магия, природа и искусство . Серия «Средние века». Университет Пенсильвании Пресс, Инкорпорейтед. п. 136. ИСБН 978-0-8122-9140-7 . Проверено 21 января 2023 г.
- ^ «Роботы Леонардо да Винчи» . Леонардо3.нет. Архивировано из оригинала 24 сентября 2008 года . Проверено 25 сентября 2008 г.
- ^ Закон, Джейн Мари (1997). Марионетки ностальгии – жизнь, смерть и возрождение японской традиции Авадзи Нингё . Издательство Принстонского университета . ISBN 978-0-691-02894-1 .
- ^ Вуд, Габби (16 февраля 2002 г.). «Живые куклы: волшебная история поисков механической жизни» . Хранитель . Архивировано из оригинала 20 декабря 2016 года.
- ^ «Мальчик-робот 1774 года» . 21 февраля 2018 г.
- ^ Эдвин Грей, Торпеды девятнадцатого века и их изобретатели, стр. 18.
- ^ Грей, Эдвин (2004). Торпеды девятнадцатого века и их изобретатели . Издательство Военно-морского института. ISBN 978-1-59114-341-3 .
- ^ Зайфер, Марк (24 октября 2011 г.). Жизнь и времена Николы Теслы Цитадель. п. 1893. ISBN 978-0-8065-3556-2 . Архивировано из оригинала 5 декабря 2016 года.
- ^ Мисснер, Бенджамин Франклин (1916). Радиодинамика: беспроводное управление торпедами и другими механизмами . Компания Д. Ван Ностранда. п. 83.
- ^ США 613809 , Тесла, Никола, «Способ и устройство для управления механизмом движущихся сосудов или транспортных средств», опубликовано 8 ноября 1898 г.
- ^ «Тесла – повелитель молний» . ПБС. Архивировано из оригинала 28 сентября 2008 года . Проверено 24 сентября 2008 г.
- ^ Саркар 2006, стр. 97.
- ^ Торрес, Леонардо, « FR327218A Система под названием телекин для дистанционного управления механическим движением », Espacenet , 10 декабря 1902 г.
- ^ Торрес, Леонардо, « GB190327073 (A) - Средство или метод управления механическими движениями на расстоянии или на расстоянии », Espacenet , 10 декабря 1903 г.
- ^ АП Юсте (январь 2008 г.). «Ранние разработки беспроводного дистанционного управления: Телекино Торрес-Кеведо» . Труды IEEE . 96 (1): 186–190. дои : 10.1109/JPROC.2007.909931 . S2CID 111010868 .
- ^ HR Эверетт (2015). Беспилотные системы Первой и Второй мировых войн . МТИ Пресс . стр. 91–95. ISBN 978-0-262-02922-3 .
- ^ «Э. Х. Реффелл и робот Эрик (1928) — первый британский робот» . Проверено 26 сентября 2023 г.
- ^ «1932 — Джордж Робот — капитан У. Х. Ричардс (британец)» . www.cyberneticzoo.com . Проверено 26 сентября 2023 г.
- ^ «Мечты робота: странная история о том, как человек пытается восстановить своего механического друга детства» . Кливленд Фри Таймс . Архивировано из оригинала 15 января 2010 года . Проверено 25 сентября 2008 г.
- ^ Шаут, Скотт (2006). Роботы Westinghouse: 1924-сегодня . Мемориальный музей Мэнсфилда. ISBN 978-0-9785844-1-2 .
- ^ Раскрыты секреты летающей бомбы: специальный чертеж в разрезе и автоматическое управление полетом и пикированием робота . Иллюстрированные лондонские новости. 1944 год.
- ^ Холланд, Оуэн. «Онлайн-архив Грея Уолтера» . Архивировано из оригинала 9 октября 2008 года . Проверено 25 сентября 2008 г.
- ^ Вауржиняк, Патрик (июль 2006 г.). «Мастера производства: Джозеф Ф. Энгельбергер» . Общество инженеров-технологов . 137 (1). Архивировано из оригинала 9 ноября 2011 года . Проверено 25 сентября 2008 г.
- ^ «Зал славы роботов – Unimate» . Университет Карнеги-Меллона . Проверено 26 сентября 2023 г.
- ^ «История компании» . Fuji Yusoki Kogyo Co. Архивировано из оригинала 4 февраля 2013 года . Проверено 12 сентября 2008 г.
- ^ «Промышленный робот KUKA FAMULUS» . Архивировано из оригинала 10 июня 2013 года . Проверено 10 января 2008 г.
- ^ «История промышленных роботов» (PDF) . Архивировано из оригинала (PDF) 24 декабря 2012 года . Проверено 27 октября 2012 г.
- ^ «История промышленных роботов» . robots.com . Архивировано из оригинала 8 июля 2015 года . Проверено 24 августа 2015 г.
- ^ "О нас" . Архивировано из оригинала 9 января 2014 года.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «RoboHon: милый маленький робот со смартфоном | Codexify» . Архивировано из оригинала 7 октября 2015 года . Проверено 6 октября 2015 г.
- ^ Тесфайе, Мехрет (13 августа 2009 г.). «Роботы получат собственную операционную систему» . Эфиопский обзор . Архивировано из оригинала 18 сентября 2009 года.
- ^ Мёкен, Юмико (январь 2009 г.). Исследования и разработки сервисных роботов нового поколения в Японии (отчет Министерства иностранных дел Великобритании). Отдел науки и инноваций, посольство Великобритании, Токио , Япония. Архивировано из оригинала 23 июля 2012 года.
- ^ Дахия, Равиндер С.; Валле, Маурицио (30 июля 2012 г.). Роботизированное тактильное зондирование – технологии и системы . Спрингер. дои : 10.1007/978-94-007-0579-1 . ISBN 978-94-007-0578-4 . Архивировано из оригинала 29 декабря 2013 года . Проверено 8 февраля 2014 г.
- ^ Дахия, Равиндер С.; Метта, Джорджио; Канната, Джорджио; Валле, Маурицио (2011). «Специальный выпуск гостевой редакционной статьи о роботизированном осязании». Транзакции IEEE в робототехнике . 27 (3): 385–388. дои : 10.1109/TRO.2011.2155830 . S2CID 18608163 .
- ^ Энгельбергер, Джозеф Ф. (август 1982 г.). «Робототехника на практике: возможности будущего». Электронное обслуживание и технологии .
- ^ Маккио, Тим (1 декабря 2008 г.). «Беспилотный самосвал Caterpillar» . Компания Фаст . Архивировано из оригинала 7 июня 2011 года.
- ^ Вайс, Ричард (9 декабря 2014 г.). «Беспилотные грузовики произведут революцию в логистике, заявляет DHL» . Новости Блумберга . Архивировано из оригинала 22 июля 2016 года.
- ^ Грейсон, Уэйн (16 октября 2014 г.). ВИДЕО: Почему технология автономной добычи полезных ископаемых Caterpillar «полностью отличается от всего, что она когда-либо создавала» . Архивировано из оригинала 13 мая 2016 года.
- ^ Такахаши, Каори (23 апреля 2015 г.). «Беспилотные самосвалы и автоматические экскаваторы приходят на австралийские шахты» . Архивировано из оригинала 9 мая 2016 года.
- ^ Холл, Мэтью (20 октября 2014 г.). «Забудьте о беспилотных автомобилях Google: в Австралии есть беспилотные грузовики» . Возраст . Архивировано из оригинала 26 апреля 2016 года.
- ^ Кларк, Чарльз (19 октября 2015 г.). «Австралийский горнодобывающий гигант Rio Tinto использует эти огромные самоуправляемые грузовики для перевозки железной руды» . Бизнес-инсайдер . Архивировано из оригинала 9 мая 2016 года.
- ^ Берман, Деннис К. (23 июля 2013 г.). «Папа, а кем был водитель грузовика? В течение следующих двух десятилетий машины сами возьмут на себя управление автомобилем» . Уолл Стрит Джорнал . Архивировано из оригинала 4 марта 2017 года.
- ^ «Робот может читать и учиться, как человек» . Новости Эн-Би-Си . 6 декабря 2010 г. Архивировано из оригинала 28 июля 2020 г. . Проверено 10 декабря 2010 г.
- ^ Мелик, Джеймс (3 января 2013 г.). «Роботы: дивный новый мир становится на шаг ближе» . Деловая газета . Всемирная служба Би-би-си. Архивировано из оригинала 14 января 2019 года.
- ^ «Кухонный робот в Риге готовит новое будущее для фаст-фуда» . techxplore.com . Проверено 14 августа 2021 г.
- ^ «Технологии могут увеличить разрыв между богатыми и бедными» . Футуризм . Проверено 23 августа 2021 г.
- ^ «Индоевропейский корень *orbh- » . Бартлби . 12 мая 2008 г. Архивировано из оригинала 24 января 2009 г. . Проверено 8 февраля 2014 г.
- ^ «робот» . Интернет-словарь этимологии . Проверено 26 сентября 2023 г.
- ^ «Первый роман Хэнка Грина — совершенно замечательная вещь» . Индианаполис Ежемесячник . 1 октября 2018 года . Проверено 20 ноября 2019 г.
- ^ «Вы неправильно произносите слово «робот» . Ежедневный Кос . Проверено 20 ноября 2019 г.
- ^ Рейнджер, Стив (20 декабря 2013 г.). «Роботы смерти, роботы любви: Реальность солдат-андроидов и почему законы для роботов обречены на провал» . Техреспублика . Архивировано из оригинала 27 января 2017 года . Проверено 21 января 2017 г.
- ^ Мубарак, Пол М.; Бен-Цви, Пинхас (2011). «Адаптивное манипулирование мобильным роботом с гибридным механизмом». 2011 Международный симпозиум IEEE по робототехнике и сенсорной среде (ROSE) . стр. 113–118. дои : 10.1109/ROSE.2011.6058520 . ISBN 978-1-4577-0819-0 . S2CID 8659998 .
- ^ Jump up to: а б «Умный Кэдди» . Зегрид. Архивировано из оригинала 11 октября 2007 года . Проверено 13 сентября 2007 г.
- ^ Чжан, Гэсян; Перес-Хименес, Марио Х.; Георге, Мариан (5 апреля 2017 г.). Реальные приложения с мембранными вычислениями . Спрингер. ISBN 978-3-319-55989-6 .
- ^ Каган, Э.; Швальб, Н.; Гал, И. (2019). Автономные мобильные роботы и мультироботные системы: планирование движения, коммуникация и роение . Джон Уайли и сыновья. ISBN 978-1-119-21286-7 . ПП 65-69.
- ^ Патич, Дипак; Ансари, Мунсаф; Тендулкар, Дилиша; Бхатлекар, Ритеш; Наик, Виджайкумар; Шайлендра, Павар (2020). «Обзор автономного робота военной службы» . Международная конференция по новым тенденциям в области информационных технологий и инженерии 2020 года (Ic-ETITE) . Международная конференция IEEE по новым тенденциям в области информационных технологий и инженерии. стр. 1–7. doi : 10.1109/ic-ETITE47903.2020.78 . ISBN 978-1-7281-4142-8 . S2CID 216588335 .
- ^ «Определение робота» (PDF) . Dansk Robot Forening. Архивировано из оригинала (PDF) 28 июня 2007 года . Проверено 10 сентября 2007 г.
- ^ «Сайты стандартов, связанных с робототехникой» . Европейская исследовательская сеть робототехники. Архивировано из оригинала 17 июня 2006 года . Проверено 15 июля 2008 г.
- ^ «Сервисные роботы» . Международная федерация робототехники . 27 октября 2012 г. Архивировано из оригинала 18 февраля 2010 г.
- ^ Митганг, Ли (25 октября 1983 г.). « Говорящая черепаха» Пофилса «Нова», верховного жреца школьного компьютерного движения». Гейнсвилл Сан .
- ^ Барнард, Джефф (29 января 1985 г.). «Роботы в школе: игры или обучение?» . Обозреватель-репортер . Вашингтон. Архивировано из оригинала 22 сентября 2015 года . Проверено 7 марта 2012 г.
- ^ «Образование: Чудо Бронкса» . Время . Апрель 1974 года. Архивировано из оригинала 24 мая 2019 года . Проверено 19 мая 2019 г.
- ^ «Архив Лихима» . www.cyberneticzoo.com . 13 сентября 2010 г. Архивировано из оригинала 28 мая 2019 г. . Проверено 29 мая 2019 г.
- ^ П. Мубарак и др., Модульная и реконфигурируемая мобильная робототехника, Журнал робототехники и автономных систем, 60 (12) (2012) 1648–1663.
- ^ Редактирование (25 декабря 2011 г.). «Франко-Квебекский консорциум Mix представляет проект летающего автомобиля» (на французском языке). aerobuzz.fr. Архивировано из оригинала 6 октября 2012 года . Проверено 7 сентября 2012 г.
- ^ Сканлан, Стив (сентябрь 2009 г.). «Модульность в робототехнике обеспечивает автоматизацию для всех» . Электронные продукты и технологии. Архивировано из оригинала 5 июля 2012 года . Проверено 7 сентября 2012 г.
- ^ «Роботы для чистки воздуховодов» (PDF) . Робототехника Дизайн Инк . Сантехника и система отопления, вентиляции и кондиционирования. Апрель 2010 г. Архивировано (PDF) из оригинала 25 апреля 2013 г. Проверено 29 апреля 2010 г.
- ^ «Универсальные роботы взаимодействуют за пределами корпусов | Техника управления» . Controleng.com. Февраль 2013. Архивировано из оригинала 18 мая 2013 года . Проверено 4 июня 2013 г.
- ^ Питтман, Каган (19 мая 2016 г.). «ИНФОГРАФИКА: Краткая история коллаборативных роботов» . Engineering.com . Архивировано из оригинала 10 июня 2016 года.
- ^ Хагерти, Джеймс (18 сентября 2012 г.). «Робот Бакстер отправляется на работу » . Уолл Стрит Джорнал . Нью-Йорк. Архивировано из оригинала 10 апреля 2015 года . Проверено 29 мая 2014 г.
- ^ Маркофф, Джон (18 сентября 2012 г.). «Робот с обнадеживающим прикосновением» . Нью-Йорк Таймс . Архивировано из оригинала 19 сентября 2012 года . Проверено 18 сентября 2012 г.
- ^ «Терминатор, играющий в пинг-понг» . Популярная наука . Архивировано из оригинала 29 марта 2011 года . Проверено 18 декабря 2010 г.
- ^ «Лучший робот 2009 года» . Нетерион . Технический журнал.
- ^ «Роботы сегодня и завтра: IFR представляет обзор мировой статистики робототехники за 2007 год» . РоботВоркс . 29 октября 2007 г. Архивировано из оригинала 5 февраля 2008 г. Проверено 14 декабря 2007 г.
- ^ «Японские роботы изо всех сил пытаются стать чемпионами мира» . Рейтер . 2 декабря 2007 г. Архивировано из оригинала 13 декабря 2007 г. Проверено 1 января 2007 г.
- ^ Jump up to: а б Хо, CC; Макдорман, К.Ф.; Прамоно, ЗАД (2008). Человеческие эмоции и зловещая долина: анализ рейтингов видео роботов с помощью GLM, MDS и ISOMAP (PDF) . 2008 г. 3-я Международная конференция ACM/IEEE по взаимодействию человека и робота (HRI). Архивировано (PDF) из оригинала 11 сентября 2008 г. Проверено 24 сентября 2008 г.
- ^ Jump up to: а б «Темы ИИ/Этика» . Ассоциация по развитию искусственного интеллекта . Архивировано из оригинала 5 августа 2011 года.
- ^ «Роботы могут быть расистами и сексистами, предупреждает новое исследование» . ТРТ Мир . Проверено 27 июня 2022 г.
- ^ «Указатель новостей по темам — Архив ЭТИЧЕСКИХ И СОЦИАЛЬНЫХ ПОСЛЕДСТВИЙ» . Ассоциация по развитию искусственного интеллекта . Архивировано из оригинала 6 апреля 2012 года.
- ^ Макнили, Кристи (29 июля 2009 г.). «Ученые предсказывают появление искусственного мозга через 10 лет» . Архивировано из оригинала 29 ноября 2009 года.
- ^ Моравец, Ганс (1999). Робот: простая машина для трансцендентного разума . Издательство Оксфордского университета. ISBN 978-0-19-513630-2 . Архивировано из оригинала 5 декабря 2016 года.
- ^ Вейганд, Мэтью (17 августа 2009 г.). «Роботы почти покоряют ходьбу, чтение, танцы» . Корея IT-раз . Архивировано из оригинала 21 июля 2011 года.
- ^ Шанце, Йенс. «Подключи и молись» . Архивировано из оригинала 12 февраля 2016 года.
- ^ Jump up to: а б Маркофф, Джон (26 июля 2009 г.). «Ученые опасаются, что машины могут перехитрить человека» . Нью-Йорк Таймс . Архивировано из оригинала 1 июля 2017 года.
- ^ Виндж, Вернор (1993). «Грядущая технологическая сингулярность: как выжить в постчеловеческую эпоху» . Архивировано из оригинала 1 января 2007 года.
- ^ Сингер, PW (21 мая 2009 г.). «Игры в революцию роботов: эксперт по военным технологиям высказывает мнение о Терминаторе: Спасение» . Сланец . Архивировано из оригинала 27 января 2010 года.
- ^ «Захват роботов» . gyre.org . Архивировано из оригинала 19 апреля 2012 года.
- ^ «Роботапокалипсис» . Engadget . Архивировано из оригинала 4 мая 2018 года.
- ^ Палмер, Джейсон (3 августа 2009 г.). «Призыв к дискуссии о роботах-убийцах» . Новости Би-би-си . Архивировано из оригинала 7 августа 2009 года.
- ^ Акс, Дэвид (13 августа 2009 г.). «Робот-тройник предвещает автономное будущее» . Проводной . Архивировано из оригинала 7 ноября 2012 года.
- ^ Мик, Джейсон (17 февраля 2009 г.). «Новый отчет, финансируемый ВМФ, предупреждает о том, что боевые роботы станут «Терминаторами» » . ДейлиТех . Архивировано из оригинала 28 июля 2009 года.
- ^ Флэтли, Джозеф Л. (18 февраля 2009 г.). «Доклад ВМФ предупреждает о восстании роботов, что свидетельствует о сильном моральном компасе» . Engadget . Архивировано из оригинала 4 июня 2011 года.
- ^ Лэмб, Грегори М. (17 февраля 2010 г.). «Новая роль роботов-воинов» . Христианский научный монитор . Архивировано из оригинала 24 сентября 2015 года.
- ^ «Военный робот, питающийся биомассой, — вегетарианец, заявляет компания» . Фокс Ньюс. 16 июля 2009 года. Архивировано из оригинала 3 августа 2009 года . Проверено 31 июля 2009 г.
- ^ Шахтман, Ной (17 июля 2009 г.). «Комната опасности: что дальше в компании национальной безопасности отрицает, что ее роботы питаются мертвецами» . Проводной . Архивировано из оригинала 29 июля 2009 года . Проверено 31 июля 2009 г.
- ^ «Cyclone Power Technologies отвечает на слухи о «плотоядном» военном роботе» (PDF) (пресс-релиз). RTI Inc., 16 июля 2009 г., стр. 1–2. Архивировано (PDF) из оригинала 23 августа 2009 г.
- ^ «Краткий обзор проекта EATR: энергетически автономный тактический робот» (PDF) . RTI Inc., 6 апреля 2009 г., с. 22.
- ^ Мануэль де Ланда , Война в эпоху интеллектуальных машин , Нью-Йорк: Zone Books, 1991, 280 страниц, твердый переплет, ISBN 0-942299-76-0 ; мягкая обложка, ISBN 0-942299-75-2 .
- ^ Макгоги, Э. (2022 г.) [10 января 2018 г.]. «Автоматизируют ли роботы вашу работу? Полная занятость, базовый доход и экономическая демократия» . Журнал промышленного права . 51 (3). дои : 10.2139/ssrn.3119589 . ССНН 3119589 .
- ^ Портер, Эдуардо; Манджу, Фархад (9 марта 2016 г.). «Будущее без рабочих мест? Два взгляда на меняющуюся рабочую силу» . Нью-Йорк Таймс . Архивировано из оригинала 15 февраля 2017 года . Проверено 23 февраля 2017 г.
- ^ Томпсон, Дерек (июль – август 2015 г.). «Мир без работы» . Атлантика . Архивировано из оригинала 27 февраля 2017 года . Проверено 11 марта 2017 г.
- ^ Ян (30 июля 2011 г.). «Foxconn заменит рабочих 1 миллионом роботов через 3 года» . Информационное агентство Синьхуа. Архивировано из оригинала 8 октября 2011 года . Проверено 4 августа 2011 г.
- ^ «Судный день – трудовое право и роботы на рабочем месте» . будущеерабочего центра . 20 ноября 2014 года. Архивировано из оригинала 3 апреля 2015 года . Проверено 7 января 2015 г.
- ^ Делани, Кевин (17 февраля 2017 г.). «Робот, который занимает вашу работу, должен платить налоги», — говорит Билл Гейтс . Кварц . Архивировано из оригинала 5 марта 2017 года . Проверено 4 марта 2017 г.
- ^ «Изменение характера труда» . Архивировано из оригинала 30 сентября 2018 года . Проверено 8 октября 2018 г.
- ^ Талбот, Бен; Даюб, Ферас; Корк, Питер; Уайет, Гордон (декабрь 2021 г.). «Навигация робота в невидимых пространствах с помощью абстрактной карты» . Транзакции IEEE в когнитивных системах и системах развития . 13 (4): 791–805. arXiv : 2001.11684 . дои : 10.1109/TCDS.2020.2993855 . ISSN 2379-8939 . S2CID 211004032 .
- ^ «Роботы для захвата и размещения контактных систем» . Контактные системы. Архивировано из оригинала 14 сентября 2008 года . Проверено 21 сентября 2008 г.
- ^ «Переборное оборудование SMT» . Ассамблеон. Архивировано из оригинала 3 августа 2008 года . Проверено 21 сентября 2008 г.
- ^ «Основы автоматизированных управляемых транспортных средств» . Савант Автоматизация, AGV Systems. Архивировано из оригинала 8 октября 2007 года . Проверено 13 сентября 2007 г.
- ^ «Автоматическая загрузка прицепа — SmartLoader» . Архивировано из оригинала 23 мая 2013 года . Проверено 2 сентября 2011 г.
- ^ «Специминдер» . CSS Робототехника. Архивировано из оригинала 1 июля 2009 года . Проверено 25 сентября 2008 г.
- ^ «Робот АДАМ» . РМТ Робототехника. Архивировано из оригинала 17 мая 2006 года . Проверено 25 сентября 2008 г.
- ^ «Могу сделать» . Этон. Архивировано из оригинала 3 августа 2008 года . Проверено 25 сентября 2008 г.
- ^ «Робот Эскорта» . Феннек Фокс Технологии. Архивировано из оригинала 6 декабря 2011 года . Проверено 25 ноября 2011 г.
- ^ «Доставочные роботы и AGV» . Мобильные роботы. Архивировано из оригинала 26 февраля 2010 года . Проверено 25 сентября 2008 г.
- ^ «Данте II, список опубликованных работ» . Институт робототехники Университета Карнеги-Меллон. Архивировано из оригинала 15 мая 2008 года . Проверено 16 сентября 2007 г.
- ^ «Миссия Mars Pathfinder: Rover Sojourner» . НАСА . 8 июля 1997 года. Архивировано из оригинала 1 февраля 2017 года . Проверено 19 сентября 2007 г.
- ^ Jump up to: а б «Робот-ассистированная хирургия: хирургическая система да Винчи» . Отделение биологии и медицины Университета Брауна. Архивировано из оригинала 16 сентября 2007 года . Проверено 19 сентября 2007 г.
- ^ «Использование роботизированных космических зондов в миссиях в дальний космос: практический пример протоколов искусственного интеллекта и требований к ядерной энергии» . Материалы Международной конференции по машиностроению, робототехнике и аэрокосмической промышленности 2011 г. Октябрь 2011.
- ^ Фауст, Джефф (16 января 2012 г.). «Обзор: Космические зонды» . Архивировано из оригинала 31 августа 2012 года. Обзор космических зондов: 50 лет исследований от Луны-1 до новых горизонтов, автор: Филипп Сегела Светлячок, 2011.
- ^ «Знаменитости собираются воспользоваться LongPen Этвуда» . Канадская радиовещательная корпорация. 15 августа 2007 года. Архивировано из оригинала 22 мая 2009 года . Проверено 21 сентября 2008 г.
- ^ Грэм, Стивен (12 июня 2006 г.). «Американская армия роботов» . Новый государственный деятель . Архивировано из оригинала 17 февраля 2012 года . Проверено 24 сентября 2007 г.
- ^ «Роботы поля боя: в Ирак и за его пределы» . Ежедневник оборонной промышленности . 20 июня 2005 г. Архивировано из оригинала 26 августа 2007 г. Проверено 24 сентября 2007 г.
- ^ Шахтман, Ной (ноябрь 2005 г.). «Багдадский бомбардировщик» . Проводной . Архивировано из оригинала 22 апреля 2008 года . Проверено 14 сентября 2007 г.
- ^ Шахтман, Ной (2 августа 2007 г.). «WIRED: Первые вооруженные роботы патрулируют Ирак (обновлено)» . Проводной . Проверено 26 сентября 2023 г.
- ^ Шахтман, Ной (28 марта 2013 г.). «WIRED: Вооруженных роботов отправили в полицию» . Проводной . Архивировано из оригинала 12 апреля 2009 года . Проверено 8 февраля 2014 г.
- ^ «Американская армия роботов: готовы ли к бою беспилотные истребители?» . Популярная механика. 17 декабря 2009 года . Проверено 26 сентября 2023 г.
- ^ Хагерман, Эрик (23 февраля 2010 г.). «Настоящее и будущее беспилотных летательных аппаратов: иллюстрированное практическое руководство» . Популярная наука . Архивировано из оригинала 26 февраля 2010 года.
- ^ Хиггинс, Кэт (12 июля 2010 г.). «Таранис: истребитель будущего стоимостью 143 миллиона фунтов стерлингов» . Небесные новости онлайн . Архивировано из оригинала 15 июля 2010 года . Проверено 13 июля 2010 г.
- ^ Эмери, Дэниел (12 июля 2010 г.). «Минобороны снимает крышку с прототипа беспилотного боевого самолета» . Новости Би-би-си . Архивировано из оригинала 12 июля 2010 года . Проверено 12 июля 2010 г.
- ^ Президентская комиссия AAAI по долгосрочному исследованию будущего искусственного интеллекта на 2008–2009 годы (отчет). Ассоциация по развитию искусственного интеллекта. Архивировано из оригинала 28 августа 2009 года . Проверено 26 июля 2009 г.
- ^ «Зачем нам нужен дружественный ИИ» . 3 закона небезопасны . Июль 2004 г. Архивировано из оригинала 24 мая 2012 г. Проверено 27 июля 2009 г.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «Век роботов ставит этическую дилемму» . Новости Би-би-си . 7 марта 2007 г. Архивировано из оригинала 15 февраля 2009 г. Проверено 2 января 2007 г.
- ^ Кристенсен, Билл (26 мая 2006 г.). «Первый закон Азимова: Япония устанавливает правила для роботов» . Живая наука . Архивировано из оригинала 13 октября 2008 года.
- ^ «Япония разрабатывает правила для продвинутых роботов» . УПИ. 6 апреля 2007 г. Архивировано из оригинала 11 октября 2008 г. – на сайте physorg.com.
- ^ «Построение безопасной и надежной социальной системы, включающей сосуществование людей и роботов» (пресс-релиз). Министерство экономики, торговли и промышленности . Март 2009 г. Архивировано из оригинала 27 сентября 2011 г.
- ^ Вен, Юэ-Сюань; Чен, Цзянь-Сюнь; Сунь, Чуэн-Цай (25 апреля 2009 г.). «На пути к обществу сосуществования человека и робота: информация о безопасности для роботов следующего поколения». Международный журнал социальной робототехники . 1 (4): 267–282. дои : 10.1007/s12369-009-0019-1 . S2CID 36232530 .
- ^ Фокс, Стюарт (19 августа 2009 г.). «Эволюционирующие роботы учатся лгать друг другу» . Популярная наука .
- ^ «Медиацентр Rio Tinto – Rio Tinto увеличивает парк беспилотных грузовиков до 150 в рамках программы «Шахта будущего™» . Риотинто.com. Архивировано из оригинала 24 апреля 2013 года . Проверено 8 февраля 2014 г.
- ^ «Удары BHP Billiton идут на автономные тренировки» . Проверено 13 февраля 2023 г.
- ^ Адриан (6 сентября 2011 г.). «Блог AIMEX — Автономное горнодобывающее оборудование» . Adrianboeing.blogspot.com. Архивировано из оригинала 18 декабря 2013 года . Проверено 8 февраля 2014 г.
- ^ «Атлас Копко – РКС» . Atlascopco.com. Архивировано из оригинала 7 февраля 2014 года . Проверено 8 февраля 2014 г.
- ^ «Трансмин – Роклогик» . Rocklogic.com.au. Архивировано из оригинала 25 января 2014 года . Проверено 8 февраля 2014 г.
- ^ Топпинг, Майк; Смит, Джейн (1999). «Обзор Handy 1, реабилитационного робота для людей с ограниченными возможностями» . Материалы конференции Центра CSUN по проблемам инвалидов . 1999. Материалы заседания: 59-е заседание. Архивировано из оригинала 5 августа 2009 года . Проверено 14 августа 2010 г.
Ранняя версия системы Handy 1 состояла из роботизированной руки Cyber 310 с пятью степенями свободы и захватом.
- ^ Дживанс, Кристина (29 ноября 2004 г.). «Добро пожаловать в стареющее будущее» . Новости Би-би-си . Архивировано из оригинала 16 октября 2007 года . Проверено 26 сентября 2007 г.
- ^ «Статистический справочник Японии: Глава 2. Население» . Статистическое бюро и Институт статистических исследований и обучения. Архивировано из оригинала 6 сентября 2013 года . Проверено 26 сентября 2007 г.
- ^ «Роботизированное будущее ухода за пациентами» . Инсайдер электронного здравоохранения. 16 августа 2007 года. Архивировано из оригинала 21 ноября 2007 года . Проверено 26 сентября 2007 г.
- ^ Гебхарт, Фред (4 июля 2019 г.). «Будущее автоматизации аптек» . Журнал тем о наркотиках . Темы о наркотиках, июль 2019 г. 163 (7) . Проверено 16 октября 2022 г.
- ^ Долан, Керри А. «У R2D2 есть свои таблетки» . Форбс . Проверено 20 ноября 2019 г.
- ^ «Наноботы играют в футбол» . Техбирбал. Архивировано из оригинала 3 апреля 2013 года . Проверено 8 февраля 2014 г.
- ^ «КурцвейлАИ.нет» . 21 июня 2010 года. Архивировано из оригинала 21 июня 2010 года . Проверено 5 июля 2016 г.
- ^ «(Эрик Дрекслер, 1986) Машины созидания, грядущая эра нанотехнологий» . E-drexler.com. Архивировано из оригинала 6 сентября 2014 года . Проверено 8 февраля 2014 г.
- ^ Феникс, Крис (декабрь 2003 г.). «О химии, наноботах и политике» . Центр ответственных нанотехнологий. Архивировано из оригинала 11 октября 2007 года . Проверено 28 октября 2007 г.
- ^ «Пионер нанотехнологий развеивает мифы о «серой слизи»» . ScienceDaily . 9 июня 2004 г.
- ^ Тот-Фейел, Тихамер (май 1996 г.). LEGO™ к звездам: активные мезоструктуры, кинетические клеточные автоматы и параллельные наномашины для космических применений . 1996 Международная конференция по космическому развитию. Нью-Йорк. Архивировано из оригинала 27 сентября 2007 года.
- ^ Фитч, Роберт; Батлер, Зак; Рус, Даниэла. «Планирование реконфигурации гетерогенных самореконфигурируемых роботов» (PDF) . Массачусетский технологический институт . Архивировано из оригинала (PDF) 19 июня 2007 года.
- ^ «Исследователи создают робота-ученого, который уже обнаружил новый катализатор» . физ.орг . Проверено 16 августа 2020 г. .
- ^ Бургер, Бенджамин; Маффеттоне, Филипп М.; Гусев Владимир Владимирович; Эйчисон, Кэтрин М.; Бай, Ян; Ван, Сяоянь; Ли, Сяобо; Олстон, Бен М.; Ли, Буйи; Клоуз, Роб; Рэнкин, Никола; Харрис, Брэндон; Сприк, Райнер Себастьян; Купер, Эндрю И. (июль 2020 г.). «Мобильный робот-химик» . Природа . 583 (7815): 237–241. Бибкод : 2020Natur.583..237B . дои : 10.1038/s41586-020-2442-2 . ISSN 1476-4687 . ПМИД 32641813 . S2CID 220420261 . Проверено 16 августа 2020 г. .
- ^ Шварц, Джон (27 марта 2007 г.). «В лаборатории: роботы, которые крадутся и извиваются» . Нью-Йорк Таймс . Архивировано из оригинала 3 апреля 2015 года . Проверено 22 сентября 2008 г.
- ^ Эшнер, Кэт (25 марта 2019 г.). «У мягких роботов теперь есть мягкие компьютеры, которые ими управляют» . Популярная наука .
- ^ «Мягкая сторона робототехники» . Май 2019 года . Проверено 13 февраля 2023 г.
- ^ «НИИ/МобильныеРоботы» . activrobots.com . Архивировано из оригинала 12 февраля 2009 года.
- ^ «Проект микророботов с открытым исходным кодом» . Архивировано из оригинала 11 ноября 2007 года . Проверено 28 октября 2007 г.
- ^ «Рой» . Корпорация АйРобот. Архивировано из оригинала 27 сентября 2007 года . Проверено 28 октября 2007 г.
- ^ Кнапп, Луиза (21 декабря 2000 г.). «Смотри, в небе: Робофлай» . Проводной . Архивировано из оригинала 26 июня 2012 года . Проверено 25 сентября 2008 г.
- ^ «Передовой гаптики» . Обзор технологий MIT . Проверено 25 сентября 2008 г.
- ^ «Выставка художников и роботов в Большом дворце 5 апреля или 9 июля 2018 года» . 14 августа 2019 года. Архивировано из оригинала 14 августа 2019 года . Проверено 3 февраля 2020 г. .
- ^ «Комический потенциал: вопросы и ответы с режиссером Стивеном Коулом» . Корнелльский университет. Архивировано из оригинала 3 января 2009 года . Проверено 21 ноября 2007 г.
- ^ Фридман, Карл, изд. (2005). Беседы с Айзеком Азимовым (1-е изд.). Джексон: Univ. Пресса Миссисипи. п. VII. ISBN 978-1-57806-738-1 . Проверено 4 августа 2011 г.
... вполне возможно, самый плодовитый
- ^ Оукс, Элизабет Х. (2004). Американские писатели . Нью-Йорк: факты в архиве. п. 24 . ISBN 978-0-8160-5158-8 . Проверено 4 августа 2011 г.
наиболее плодовитые авторы Азимова.
- ↑ Он написал «более 460 книг, а также тысячи статей и обзоров» и был «третьим по плодовитости писателем всех времен [и] одним из отцов-основателей современной научной фантастики». Уайт, Майкл (2005). Айзек Азимов: жизнь великого мастера научной фантастики . Кэрролл и Граф. стр. 1–2. ISBN 978-0-7867-1518-3 . Архивировано из оригинала 5 декабря 2016 года . Проверено 25 сентября 2016 г.
- ^ Р. Кларк. «Законы робототехники Азимова – последствия для информационных технологий» . Австралийский национальный университет/IEEE. Архивировано из оригинала 22 июля 2008 года . Проверено 25 сентября 2008 г.
- ^ Зейлер, Эдвард; Дженкинс, Джон Х. (27 июня 2008 г.). «Часто задаваемые вопросы об Айзеке Азимове» . Домашняя страница Айзека Азимова. Архивировано из оригинала 16 июля 2012 года . Проверено 24 сентября 2008 г.
- ^ Уайт, Майкл (2005). Айзек Азимов: Жизнь великого магистра научной фантастики . Кэрролл и Граф. п. 56. ИСБН 978-0-7867-1518-3 .
- ^ «Интеллектуальные машины: призыв к запрету роботов, предназначенных для секс-игрушек» . Новости Би-би-си . 15 сентября 2015 г. Архивировано из оригинала 30 июня 2018 г. . Проверено 21 июня 2018 г.
- ^ Абдоллахи, Ходжат; Моллахоссейни, Али; Лейн, Джош Т.; Махур, Мохаммад Х. (ноябрь 2017 г.). Пилотное исследование по использованию интеллектуального робота, похожего на живого, в качестве компаньона для пожилых людей, страдающих деменцией и депрессией . 2017 17-я Международная конференция IEEE-RAS по гуманоидной робототехнике (гуманоиды). стр. 541–546. arXiv : 1712.02881 . Бибкод : 2017arXiv171202881A . дои : 10.1109/humanoids.2017.8246925 . ISBN 978-1-5386-4678-6 . S2CID 1962455 .
