Подводный компьютер
 Hydrospace Explorer Trimix и компьютер для погружений с ребризером. Suunto Mosquito с ремешком послепродажного обслуживания и компьютерами для любительского дайвинга iDive DAN | |
| Другие имена | Персональный подводный компьютер |
|---|---|
| Использование | Запись профиля погружения и информация о декомпрессии в реальном времени. |
Подводный компьютер , персональный декомпрессионный компьютер или декомпрессометр — это устройство, используемое подводным дайвером для измерения прошедшего времени и глубины во время погружения и использования этих данных для расчета и отображения профиля всплытия, который, в соответствии с запрограммированным алгоритмом декомпрессии , даст низкий риск декомпрессионной болезни . [1] [2] Вторичная функция — запись профиля погружения, предупреждение дайвера о возникновении определенных событий и предоставление полезной информации об окружающей среде.
Большинство дайв-компьютеров используют данные о давлении окружающей среды в режиме реального времени для алгоритма декомпрессии, чтобы указать оставшееся время до безостановочного предела , а после его прохождения — минимальную декомпрессию, необходимую для всплытия с приемлемым риском декомпрессионной болезни. Было использовано несколько алгоритмов и личного консерватизма могут быть доступны различные факторы . Некоторые подводные компьютеры позволяют переключать газ во время погружения, а некоторые контролируют давление, остающееся в баллонах акваланга. Могут быть доступны звуковые сигналы, предупреждающие дайвера о превышении безостановочного предела, максимальной рабочей глубины для газовой смеси, рекомендуемой скорости всплытия, декомпрессионного потолка или другого предела, за которым риск значительно возрастает.
На дисплее отображаются данные, позволяющие дайверу избежать декомпрессии или относительно безопасную декомпрессию, а также глубина и продолжительность погружения. Это должно быть четко, разборчиво и недвусмысленно отображено на всех уровнях освещенности. Для интереса и удобства могут быть доступны несколько дополнительных функций и дисплеев, таких как температура воды и направление компаса, а также можно загрузить данные о погружениях на персональный компьютер через кабельное или беспроводное соединение. Данные, записанные дайв-компьютером, могут иметь большую ценность для расследователей несчастного случая при дайвинге и могут позволить обнаружить причину несчастного случая.
Подводные компьютеры могут крепиться на запястье или крепиться к консоли с погружным манометром . Дайв-компьютер воспринимается дайверами-любителями и поставщиками услуг как один из наиболее важных элементов защитного оборудования. [3] Это одно из самых дорогих предметов снаряжения для дайвинга, принадлежащее большинству дайверов. Использование профессиональными аквалангистами также распространено, но использование дайверами с надводным питанием менее распространено, поскольку глубина погружения дайвера контролируется на поверхности с помощью пневмофатометра , а декомпрессия контролируется супервайзером по дайвингу . Некоторые фридайверы используют компьютер для погружений другого типа для записи своих профилей погружений и предоставления им полезной информации, которая может сделать их погружения более безопасными и эффективными, а некоторые компьютеры могут выполнять обе функции, но требуют от пользователя выбора необходимой функции.
Цель [ править ]


Основная цель декомпрессионного компьютера — облегчить безопасную декомпрессию подводного дайвера, вдыхающего подходящий газ при атмосферном давлении, предоставляя информацию, основанную на недавней истории воздействия давления на дайвера, которая позволяет совершить всплытие с приемлемо низким риском развития декомпрессионной болезни . Подводные компьютеры решают ту же проблему, что и таблицы декомпрессии , но способны выполнять непрерывный расчет теоретического парциального давления инертных газов в организме на основе фактической глубины и временного профиля дайвера, а также модели декомпрессии, используемой компьютером. [1] Поскольку подводный компьютер автоматически измеряет глубину и время, он может предупреждать о чрезмерной скорости всплытия и пропущенных декомпрессионных остановках , и у дайвера меньше причин носить с собой отдельные часы для погружения и глубиномер . Многие подводные компьютеры также предоставляют дайверу дополнительную информацию, включая температуру окружающей среды, парциальное давление кислорода в дыхательном газе при атмосферном давлении, накопленные данные о токсичности кислорода , считываемый компьютером журнал погружений и давление оставшегося дыхательного газа при погружении. цилиндр . Эта записанная информация может использоваться дайвером для личного журнала его деятельности или в качестве важной информации при медицинском осмотре или судебных делах после несчастных случаев при дайвинге . [4] [5] [2]
Благодаря способности компьютера постоянно пересчитывать данные на основе меняющихся данных, дайвер получает преимущество, поскольку может оставаться под водой в течение более длительных периодов времени с приемлемым риском. Например, дайвер-любитель, который планирует оставаться в пределах «бездекомпрессионной остановки», во многих случаях может просто подниматься на несколько футов каждую минуту, продолжая погружение, и при этом оставаться в разумно безопасных пределах, вместо того, чтобы придерживаться предварительных условий. запланированное время дна, а затем прямое восхождение. Многоуровневые погружения можно заранее спланировать с помощью традиционных таблиц для погружений или приложений для персонального компьютера и смартфона или на лету с использованием водонепроницаемых таблиц для погружений, но дополнительные расчеты усложняются, и план может оказаться обременительным для выполнения, а также возникает риск ошибок. увеличивается со сложностью профиля. Компьютеры допускают определенную степень спонтанности во время погружения и автоматически учитывают отклонения от плана погружения. [6]
Подводные компьютеры используются для безопасного расчета графиков декомпрессии в рекреационных, научных и военных водолазных операциях. Нет никаких оснований предполагать, что они не могут быть ценными инструментами для коммерческих водолазных операций, особенно при многоуровневых погружениях. [7]
Компоненты [ править ]

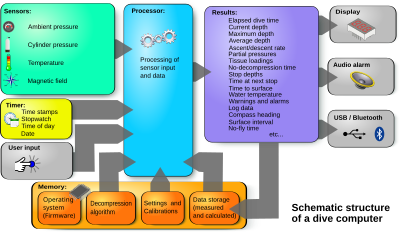
Некоторые компоненты являются общими для всех моделей подводного компьютера, поскольку они необходимы для выполнения основных функций:
- датчик давления окружающей среды
- датчик давления
- Компонент, преобразующий давление окружающей среды в электрический сигнал. [8] пьезорезистивные датчики давления . Для этой цели часто используются [9] [10]
- аналого-цифровой преобразователь
- Компонент, который преобразует выходное напряжение датчика давления в двоичный сигнал, который может обрабатываться компьютером. [8]
- Интерфейс пользовательского ввода в виде кнопок или внешних контактов, которые принимают ручной ввод от пользователя для установки пользовательских настроек и выбора параметров отображения. [11] [2]
- часы
- Схема, которая синхронизирует шаги процессора и отслеживает прошедшее время. Он также может отслеживать время суток. [8]
- отображать
- Экран для представления результатов вычислений дайверу в режиме реального времени. [8]
- лицевая панель
- Прозрачное стекло или пластиковое окно, закрывающее экран. Закаленное стекло и синтетический сапфир наиболее устойчивы к царапинам, но хрупкие и могут треснуть при ударе, что приведет к протечке корпуса, что может привести к разрушению электроники. Эти материалы популярны в моделях наручных часов, которые предполагается носить вне воды. Более крупные устройства с большей вероятностью будут носиться только во время погружения, а более ударопрочные лицевые панели из поликарбоната, используемые в этих компьютерах, более чувствительны к царапинам, но с меньшей вероятностью будут затоплены. Для некоторых моделей доступны одноразовые прозрачные самоклеящиеся защитные лицевые панели. [2]
- жилье
- Водонепроницаемый контейнер, в который устанавливаются другие компоненты, защищает их от воздействия окружающей среды. [8] Используются три основных форм-фактора: крепление на запястье, круглое крепление (шайба) на запястье или консоли, прямоугольное или контурное крепление на запястье и размещение смартфона. [12] [13]
- микропроцессор
- Микросхема логической обработки, преобразующая входные сигналы в выходные данные в реальном времени, моделирующая состояние декомпрессии дайвера с использованием выбранного алгоритма и других входных данных. [8]
- источник питания
- Батарея, обеспечивающая электроэнергию для работы устройства. Он может быть перезаряжаемым, заменяемым пользователем или требовать замены авторизованным агентом или производителем. [8]
- Оперативная память (ОЗУ)
- Временное хранилище переменных данных и результатов вычислений. [8]
- постоянное запоминающее устройство (ПЗУ)
- Энергонезависимая память, содержащая программу и константы, используемые в алгоритме. [8]
- ремень
- Ремешок, используемый для крепления корпуса к запястью пользователя. Можно использовать несколько типов. Для большей безопасности можно использовать двойные ремни. Альтернативой ремням является крепление на консоли, обычно ограничивающееся компьютерами для любительского дайвинга форм-фактора шайбы.
- датчик температуры
- Компонент, измеряющий температуру датчика давления для компенсации изменений температуры. Выходные данные могут быть записаны и отображены, но основной функцией является обеспечение точного измерения давления. [14]
Дополнительные компоненты могут потребоваться для дополнительных или расширенных функций и возможностей.
- акселерометр
- используется для определения направленного ввода, а также углов наклона и наклона. [15]
- Bluetooth-оборудование
- Используется для связи со смартфонами или персональными компьютерами для загрузки данных и загрузки обновлений прошивки. [11]
- зуммер
- Используется для звуковой и вибрационной сигнализации. [11]
- внешние электрические контакты
- Может использоваться для нескольких целей на поверхности, включая зарядку аккумулятора и связь с персональным компьютером. [16]
- GPS-приемник
- Используется для определения местоположения на поверхности. [16]
- Феррозондовый компас
- Используется для обеспечения функций компаса для навигации. [16]
- оборудование для инфракрасной передачи данных
- Используется для передачи данных на персональный компьютер и обратно. [2]
- датчик освещенности
- Используется для обеспечения автоматической интенсивности отображения. [16]
- защитная пленка для экрана
- Прозрачная защитная пленка или линза, закрывающая экран для защиты экрана от царапин. [11]
- оборудование ультразвуковой связи
- Используется для беспроводной связи с датчиками давления на газовых баллонах для газоинтегрированных систем, а в некоторых случаях и с другой периферией. [11]
- водонепроницаемые электрические соединения
- Для получения сигналов от кислородных ячеек и связи с ребризерами с электронным управлением. [17]
- беспроводная зарядная катушка
- Используется для подзарядки аккумулятора. [18]
Этот раздел нуждается в расширении : дополнительными компонентами. Вы можете помочь, добавив к нему . ( апрель 2024 г. ) |
Функция [ править ]
Подводные компьютеры — это компьютеры с батарейным питанием в водонепроницаемом и устойчивом к давлению корпусе. Эти компьютеры отслеживают профиль погружения, измеряя время и давление . Все дайв-компьютеры измеряют давление окружающей среды, чтобы моделировать концентрацию газов в тканях дайвера. Более совершенные подводные компьютеры предоставляют дополнительные измеренные данные и вводимые пользователем данные в расчеты, например, температуру воды, газовый состав, высоту водной поверхности, [7] или оставшееся давление в водолазном баллоне. Подводные компьютеры, подходящие для расчета декомпрессии при погружениях с ребризером, должны измерять парциальное давление кислорода в дыхательном контуре. Подводный компьютер может использоваться в качестве блока управления ребризером замкнутого контура с электронным управлением, и в этом случае он будет рассчитывать парциальное давление кислорода в контуре, используя выходные данные более чем одного датчика кислорода. [19]
Компьютер использует введенные данные о давлении и времени в алгоритме декомпрессии для оценки парциального давления инертных газов, растворенных в тканях дайвера. [20] На основе этих расчетов компьютер оценивает, когда безопасное прямое всплытие на поверхность больше невозможно и какие декомпрессионные остановки потребуются, исходя из профиля погружения до этого момента и недавних гипербарических воздействий, которые могли оставить остаточные явления. растворенные газы в дайвере. [20]
Многие подводные компьютеры способны составить график декомпрессии с низким уровнем риска для погружений, происходящих на высоте, что требует более длительной декомпрессии, чем для того же профиля на уровне моря, поскольку компьютеры измеряют атмосферное давление перед погружением и учитывают это при алгоритм. Многие дайв-компьютеры постоянно контролируют давление, пока аккумулятор заряжен, поэтому, когда дайверы путешествуют до или после погружения и особенно во время полета, им следует перевозить с собой дайв-компьютер в том же режиме давления (ручная кладь, не сдаваемая в багаж). в трюме), чтобы компьютер мог измерить профиль давления, которому подверглось их тело, и учесть его при последующих погружениях. [ нужна ссылка ] Старые компьютеры, которые полностью выключаются при выключении, не получат выгоды от этого процесса.
На многих компьютерах у пользователя есть возможность настроить консерватизм декомпрессии . Это может быть личный фактор , который вносит нераскрытое изменение в алгоритм, произвольно выбранный производителем, или установка градиентных коэффициентов , способ уменьшения допустимого перенасыщения тканевых компартментов определенными соотношениями, которые четко определены в литературу, оставляя ответственность за принятие обоснованных решений по личной безопасности дайверу. [21] [16]
Алгоритмы [ править ]
Алгоритмы декомпрессии, используемые в подводных компьютерах, различаются в зависимости от производителя и модели компьютера. Примерами алгоритмов декомпрессии являются алгоритмы Бюльмана и их варианты, экспоненциальная/линейная модель Тельмана VVAL18 , модель переменной проницаемости и модель пузыря с уменьшенным градиентом . [2] Собственные названия алгоритмов не всегда четко описывают реальную модель декомпрессии. Алгоритм может быть разновидностью одного из стандартных алгоритмов, например, несколько версий алгоритма декомпрессии Бюльмана используется . Используемый алгоритм может оказаться важным фактором при выборе подводного компьютера. Подводные компьютеры, использующие одну и ту же внутреннюю электронику и алгоритмы, могут продаваться под разными торговыми марками. [22]
Используемый алгоритм предназначен для информирования дайвера о профиле декомпрессии, который позволит поддерживать риск декомпрессионной болезни (ДКБ) на приемлемом уровне. Исследователи используют экспериментальные программы дайвинга или данные, записанные во время предыдущих погружений, для проверки алгоритма. Компьютер для погружений измеряет глубину и время, а затем использует алгоритм для определения требований к декомпрессии или оценки оставшегося времени безостановок на текущей глубине. Алгоритм учитывает величину снижения давления, изменения дыхательного газа, повторяющиеся воздействия, скорость подъема и время нахождения на высоте. Алгоритмы не способны надежно учитывать возраст, предыдущую травму, температуру окружающей среды, тип телосложения, употребление алкоголя, обезвоживание и другие факторы, такие как открытое овальное окно , поскольку влияние этих факторов не было экспериментально количественно оценено, хотя некоторые могут попытаться компенсируйте это, принимая во внимание данные пользователя, а также различную периферийную температуру и рабочую нагрузку, используя датчики, которые отслеживают температуру окружающей среды и изменения давления в баллоне в качестве прокси. [23] Известно, что температура воды является плохим показателем температуры тела, поскольку она не учитывает эффективность гидрокостюма или тепло, выделяемое при работе или активных системах отопления. [24]
По состоянию на 2009 год [update], новейшие компьютеры для дайвинга на рынке использовали:
- Liquivision X1: V-Planner Live: Модель переменной проницаемости VPM-B и GAP для X1: Бюльман GF (Бюльман с градиентными факторами) [ нужна ссылка ]
- Mares : Модель пузырька с уменьшенным градиентом Mares-Wienke [ нужна ссылка ] [ нужны разъяснения ]
- Системы пелагического давления : модифицированная Haldanean / DSAT база данных или Bühlmann ZH-L16C (называемая Z+) [ нужна ссылка ]
- Seiko : Bühlmann ZH-L12 в модификации Рэнди Борера. [25]
- Suunto : Модель Suunto-Wienke с уменьшенным пузырьковым градиентом . Сложенный RGBM Suunto — это не настоящий алгоритм RGBM, требующий больших вычислительных ресурсов, а модель Холдена с дополнительными пузырьковыми ограничительными факторами. [2]
- Uwatec : Bühlmann ZH-L8 /ADT (адаптивный), MB (микропузырьковый), PMG (предиктивный мультигаз), Bühlmann ZH-L16 DD (тримикс). [ нужна ссылка ]
- Heinrichs Weikamp OSTC и DR5: Bühlmann Эрика Бейкера ZH-L16 и Bühlmann ZH-L16 плюс алгоритм глубокой остановки с градиентными коэффициентами как для ребризера с открытым контуром, так и с фиксированной уставкой замкнутого контура. [ нужна ссылка ]
По состоянию на 2012 год [update]:
- Cochran EMC-20H: модель Холдана из 20 тканей. [7]
- Cochran VVAL-18: модель Холдейна из девяти тканей с экспоненциальным газообразованием и линейным газообразованием. [7]
- Дельта P: 16-тканная модель Холдана с VGM (модель переменного градиента, т. е. допустимые уровни перенасыщения изменяются во время погружения в зависимости от профиля, но никаких подробностей о том, как это делается, не приводится). [7]
- Mares: десятитканная модель Холдана с RGBM; [7] часть модели RGBM корректирует пределы градиента в сценариях с несколькими погружениями с помощью нераскрытых «коэффициентов уменьшения». [26] : 16–20
- Suunto: модель Холдана с девятью тканями и RGBM; [7] часть модели RGBM корректирует пределы градиента в сценариях с несколькими погружениями с помощью нераскрытых «коэффициентов уменьшения». [26] : 16–20
- Uwatec: ZH-L8 ADT (адаптивный), MB (микропузырьковый), PMG (предсказывающий мультигаз), ZH-L16 DD (тримикс).
По состоянию на 2019 год [update]:
- Aqualung: Pelagic Z+ – запатентованный алгоритм, основанный на алгоритме Bühlmann ZH-L16C. [27]
- Кресси: алгоритм Холдейна и Винке RGBM. [27] [ нужны разъяснения ]
- Garmin: алгоритм Бюльмана ZH-L16C. [27]
- Океанический: двойной алгоритм: пелагический Z+ (ZH-L16C) и пелагический DSAT. [27]
- ScubaPro: ZH-L8 ADT (адаптивный), MB (микропузырьковый), PMG (предсказывающий мультигаз), ZH-L16 DD (тримикс).
- Буревестник: Bühlmann ZH-L16C с выбираемыми пользователем коэффициентами градиента или опционально VPM-B и VPM-B/GFS. [27] [21]
По состоянию на 2021 год [update]:
- Aqualung: Pelagic Z+ — запатентованный алгоритм, разработанный доктором Джоном Э. Льюисом на основе алгоритма Бюльмана ZH-L16C. Консерватизм можно регулировать путем настройки высоты, глубоких остановок и остановок безопасности. [23]
- Атомный: «Рекреационный RGBM», основанный на модели Винке, с использованием вводимых пользователем данных о возрасте, выбранном уровне риска и уровне нагрузки для корректировки консерватизма. [23]
- Кресси: RGBM. Пользовательские настройки консерватизма и дополнительные глубокие остановки и остановки безопасности. [23]
- Garmin: Bühlmann ZH-L16C, с возможностью выбора из трех предустановленных настроек консерватизма или настраиваемых коэффициентов градиента, а также настраиваемых остановок безопасности. [23]
- Mares: RGBM или Bühlmann ZH-L16C GF (фактор градиента) в зависимости от модели. Предустановленные и настраиваемые параметры консерватизма. [23]
- Oceanic: Пользовательский вариант двойных алгоритмов: Pelagic Z+ (ZH-L16C) и Pelagic DSAT. [23]
- Океаны: Bühlmann ZH-L16C GF (фактор градиента). Предустановленные настройки консерватизма.
- Соотношение: Bühlmann ZH-L16B и VPM-B, устанавливаемые пользователем градиентные коэффициенты (GFL/GFH) для Bühlmann и устанавливаемый пользователем радиус пузырька для VPM.
- ScubaPro: ZH-L16 ADT MB PMG. Модифицированный алгоритм прогнозирования нескольких газов с различными вариантами консерватизма с вводом пользователем данных об уровне опыта, возрасте и физическом состоянии, которые, как предполагается, оказывают некоторое влияние на скорость удаления газов. Также доступны данные о частоте дыхания, температуре кожи и мониторе сердечного ритма, которые могут использоваться алгоритмом для оценки состояния рабочей нагрузки, что используется для модификации алгоритма. [23]
- Буревестник: Bühlmann ZH-L16C с дополнительными VPM-B, VPM-B/GFS и DCIEM. Стандартный пакет - Bühlmann с выбираемыми пользователем градиентными коэффициентами и возможностью включения программного обеспечения VPM, которое можно использовать в режимах технологии открытого цикла и ребризера, или включения DCIEM, которое можно использовать в режимах воздуха и одного газа найтрокса. VPM-B/GFS представляет собой комбинацию двух моделей, в которой для каждой остановки применяется верхний предел более консервативной модели. [23] [28] Текущий потолок декомпрессии может отображаться в качестве опции, и алгоритм рассчитает декомпрессию на любой глубине ниже потолка. Опция GFS представляет собой гибрид, который автоматически выбирает потолок декомпрессии из более консервативного профиля VPM-B и профиля Bühlmann ZH-L16C. Для профиля Бюльмана используется один коэффициент градиента, регулируемый в диапазоне от 70 % (наиболее консервативный) до 99 % (наименее консервативный), значение по умолчанию – 90 %. Модель DCIEM отличается от ZH-L16C и VPM, которые являются параллельными моделями и предполагают, что все отсеки подвергаются воздействию парциального давления окружающей среды и между отсеками не происходит газообмена. Серийная модель предполагает, что диффузия происходит через ряд отсеков, и только один подвергается воздействию парциального давления окружающей среды. [29]
- Suunto: алгоритм на основе RGBM с настройками консервативности, известный как сравнительно консервативный алгоритм. В разных моделях используются различные версии. Технические компьютеры используют алгоритм, который требует гибкости за счет использования непрерывной декомпрессии, что означает, что вместо глубины остановки отображается текущий потолок.
По состоянию на 2023 год [update]:
- Компания Shearwater Research поставила ВМС США подводные компьютеры с экспоненциальным/линейным алгоритмом, основанным на алгоритме Тельмана, с тех пор как компания Cochran Undersea Technology закрылась после смерти владельца. По состоянию на 2024 год этот алгоритм недоступен для широкой публики на компьютерах Shearwater, хотя он находится в свободном доступе и известен как менее рискованный, чем алгоритм Бульмана для погружений с использованием газовой смеси и CCR с постоянной заданной точкой на более глубоких глубинах, что является основным рынок продукции Shearwater. [32] [33]
Отобразить информацию [ править ]





Подводные компьютеры предоставляют дайверу различную визуальную информацию о погружении, обычно на ЖК- или OLED- дисплее. Во время погружения можно выбрать более одного расположения экранов, а основной экран будет отображаться по умолчанию и содержать важные для безопасности данные. Вторичные экраны обычно выбираются нажатием одной или двух кнопок один или несколько раз и могут быть временными или оставаться видимыми до тех пор, пока не будет выбран другой экран. Вся критическая для безопасности информация должна быть видна на любом экране, который не будет автоматически возвращаться в течение короткого периода времени, поскольку дайвер может забыть, как вернуться к ней, и это может подвергнуть его значительному риску. Некоторые компьютеры используют систему прокрутки, которая, как правило, требует большего количества нажатий кнопок, но ее легче запомнить, так как в конечном итоге появится правильный экран, другие могут использовать более широкий выбор кнопок, что происходит быстрее, если известна последовательность, но и проще. забыть или запутаться и может потребовать большего внимания дайвера: [11] [16]
Большинство подводных компьютеров отображают следующий базовый профиль погружения и информацию о статусе безостановочного погружения во время погружения. Эта информация включает в себя важную для безопасности информацию и обычно отображается на подводном дисплее по умолчанию, а некоторые могут отображаться на всех подводных дисплеях: [34] [21]
- Текущая глубина (определяется на основе давления окружающей среды).
- Максимальная глубина, достигнутая в текущем погружении.
- Безостановочное время — время, оставшееся на текущей глубине без необходимости декомпрессионных остановок при всплытии.
- Прошедшее время текущего погружения.
Многие подводные компьютеры также отображают дополнительную информацию. Некоторые из них критически важны для безопасности декомпрессии и обычно отображаются на всех экранах, доступных под водой, или имеют временной возврат по умолчанию к основному экрану: большая часть некритической информации, вероятно, будет полезна, по крайней мере, при некоторых погружениях. и может отображаться на дополнительном экране, который можно выбрать во время погружения. [19]
- Общее время всплытия или время выхода на поверхность (TTS) при условии немедленного всплытия с рекомендованной скоростью и декомпрессионных остановок, как указано. Если в компьютере включено несколько газов, время выхода на поверхность можно спрогнозировать на основе оптимального газа, выбранного во время всплытия, но фактическое время выхода на поверхность будет зависеть от фактического выбранного газа и может быть больше, чем отображаемое значение. Это не отменяет расчет декомпрессии, который учитывает фактическое воздействие и выбранный газ. [16] [11]
- Требуемая глубина и время декомпрессионной остановки, а также при условии немедленного всплытия с рекомендуемой скоростью. Глубина и продолжительность первой остановки обычно отображаются на видном месте. [16] [21]
- Температура окружающей среды (фактически температура датчика давления). Это может быть дисплей по умолчанию или настройка, выбранная пользователем, и его может не быть на основном дисплее, поскольку это не является критичной для безопасности информацией. [14]
- Текущая скорость подъема. Она может отображаться как фактическая скорость всплытия или относительная скорость по сравнению с рекомендуемой скоростью. [11]
- Профиль погружения (часто не отображается во время погружения, а передается на персональный компьютер). Информация не является критичной для безопасности, поэтому обычно выводится на временный дополнительный дисплей, если таковой имеется. [16]
- Используемая газовая смесь по выбору пользователя. [16] [11]
- Парциальное давление кислорода на текущей глубине, исходя из выбранной газовой смеси. [16] [11]
- Совокупное воздействие кислородного отравления (ЦНС), рассчитанное на основе измеренного давления, времени и выбранной газовой смеси. [16] [11]
- Состояние заряда аккумулятора или предупреждение о низком заряде аккумулятора. [16] [11]
- Время суток, часто в 12-часовом или 24-часовом формате. [21]
- Курс по компасу с использованием феррозондового датчика с коррекцией наклона. Когда это возможно, обычно это сочетается с отображением всех критических для безопасности данных, чтобы не приходилось автоматически возвращаться к основному виду отображения. [11]
Некоторые компьютеры будут отображать дополнительную информацию о статусе декомпрессии после превышения безостановочного предела. Эти данные могут быть выбраны дайвером в качестве дополнительных настроек отображения и могут потребовать более полного понимания теории и моделирования декомпрессии, чем обеспечивается при обучении дайверов-любителей. Они предназначены для информации, которая может помочь техническому дайверу принять более обоснованное решение при возникновении непредвиденных обстоятельств, влияющих на риск декомпрессии. [35]
- На глубине + 5 минут (@+5) показывает влияние на время выхода на поверхность пребывания на текущей глубине на текущий дыхательный газ в течение еще пяти минут. На дисплее отобразится измененный TTS. [35]
- Дельта + 5 (Δ+5) — это изменение времени выхода на поверхность, если оставаться на той же глубине с тем же газом в течение 5 минут дольше. Это значение будет положительным в случае поглощения газа, отрицательным в случае выделения газа и 0, если дополнительное воздействие не оказывает чистого влияния на расчетную обязательность декомпрессии. Это полезно для многоуровневых погружений, где помогает оценить, хватит ли дыхательного газа для всплытия. [35]
- Декомпрессионный потолок — глубина, на которой рассчитывается перенасыщение контролирующих тканей на максимально допустимом уровне по алгоритму. Это наименьшая глубина, на которую дайвер может подняться с приемлемым риском декомпрессии в соответствии с выбранными ограничениями. Эта глубина будет равна или меньше глубины текущей обязательной остановки и глубже, чем следующая обязательная остановка. Когда декомпрессия завершится, потолок будет равен нулю. [35]
- Коэффициент градиента тока (GF99) указывает на текущую близость дайвера к базовому значению M алгоритма в ограничивающей ткани. Если он превышает 100%, то дайвер перенасыщен в соответствии с наименее консервативной настройкой алгоритма. Это значение будет медленно уменьшаться на каждой декомпрессионной остановке и увеличиваться во время подъема на следующую остановку. Эта функция может быть полезна в непредвиденных обстоятельствах, когда дайверу необходимо выйти из воды как можно скорее, но с разумным риском декомпрессии. Ответственное использование этой функции требует хорошего понимания теории декомпрессии и того, как она моделируется компьютером. [35]
- Коэффициент градиента всплытия. Рассчитанный коэффициент градиента для контролирующей ткани, если дайвер всплывет прямо с текущей глубины, без каких-либо остановок. Показанная цифра представляет собой процент от рассчитанного значения М на данном этапе погружения. Если он превышает 99%, риск ДКБ выше, чем для базового значения М, а если ниже, то риск ниже, чем для базового значения М. Когда указанная декомпрессия исчезнет, он будет на уровне GF-Hi. значение, выбранное дайвером. Это дополнительный способ мониторинга состояния декомпрессии, который может быть полезен в чрезвычайной ситуации. [35]
Некоторые компьютеры, известные как встроенные в воздух или газ, предназначены для отображения информации от датчика давления в водолазном баллоне , например:
- Давление газа. [36] [11]
- Расчетное оставшееся время полета (RAT) на основе доступного газа, скорости его потребления и времени всплытия. [36] [11]
Некоторые компьютеры могут отображать в реальном времени парциальное давление кислорода в ребризере. Для этого требуется вход от кислородной ячейки. Эти компьютеры также будут рассчитывать совокупное воздействие кислородного отравления на основе измеренного парциального давления. [19]
Некоторые компьютеры могут отображать график текущего насыщения тканей для нескольких тканевых компартментов в соответствии с используемым алгоритмом. [36] [11]
Некоторая информация, не имеющая практической пользы во время погружения, отображается только на поверхности, чтобы избежать информационной перегрузки дайвера во время погружения: [19]
- Дисплей «Время летать», показывающий, когда дайвер может безопасно сесть в самолет.
- Время десатурации - расчетное время, необходимое для возвращения всех тканей к равновесию растворенного газа при поверхностном давлении.
- Журнал ключевой информации о предыдущих погружениях – дата, время начала, максимальная глубина, продолжительность и, возможно, другие.
- Максимальное бездекомпрессионное время на дне для последующих погружений основано на расчетной остаточной концентрации инертных газов в тканях.
- Функции планирования погружения (без времени декомпрессии в зависимости от текущей нагрузки на ткани, выбранной пользователем глубины и дыхательного газа). [17]
Предупреждения и сигналы тревоги могут включать: [16] [21]
- Превышена максимальная рабочая глубина
- Декомпрессионный предел не приближается
- Ни один предел декомпрессии не превышен
- Чрезмерная скорость всплытия
- Нарушение декомпрессионного потолка
- Пропущенная декомпрессия
- Низкое давление в цилиндре (где применимо)
- Парциальное давление кислорода высокое или низкое
- Нарушение максимальной глубины
Звуковая информация [ править ]
Многие подводные компьютеры имеют предупреждающие звуковые сигналы, которые предупреждают дайвера о таких событиях, как:
- Чрезмерная скорость подъема.
- Пропущенные декомпрессионные остановки.
- Превышена максимальная рабочая глубина.
- токсичности кислорода . Превышены пределы
- Нарушение декомпрессионного потолка или нарушение глубины остановки.
Некоторые зуммеры можно отключить, чтобы избежать шума.
Выборка, хранение и загрузка данных [ править ]
Частота выборки данных обычно варьируется от одного раза в секунду до одного раза в 30 секунд, хотя были случаи, когда использовалась частота дискретизации всего один раз в 180 секунд. Эта скорость может выбираться пользователем. Разрешение дисплея по глубине обычно находится в диапазоне от 1 м до 0,1 м. Форматом записи глубины за интервал отбора проб может быть максимальная глубина, глубина во время отбора проб или средняя глубина за интервал. В течение небольшого интервала времени они не будут иметь существенного значения для расчетного состояния декомпрессии дайвера и представляют собой значения в той точке, где дайвер несет компьютер (обычно это запястье или подвешенный на консоли), и могут варьироваться. по глубине отличается от глубины автомата, который определяет давление дыхательного газа, которое является соответствующим давлением для расчета декомпрессии. [2]
Разрешение температуры для записей данных варьируется от 0,1 °C до 1 °C. Точность обычно не указывается, и часто существует задержка в несколько минут, поскольку температура датчика изменяется в соответствии с температурой воды. Температура измеряется датчиком давления и необходима в первую очередь для предоставления правильных данных о давлении, поэтому получение точных данных о температуре окружающей среды в режиме реального времени не является приоритетом для мониторинга декомпрессии. [2]
Хранение данных ограничено внутренней памятью, а объем генерируемых данных зависит от частоты дискретизации. Емкость может быть указана в часах работы, количестве зарегистрированных погружений или в том и другом. К 2010 году были доступны значения до 100 часов. [2] На это может влиять частота дискретизации, выбранная дайвером.
К 2010 году большинство дайв-компьютеров имели возможность загружать данные на ПК или смартфон через кабельное, инфракрасное или Bluetooth . беспроводное соединение [2] [21]
Компьютеры для назначения специального дайвинга

Некоторые дайв-компьютеры способны рассчитывать графики декомпрессии для дыхательных газов, отличных от воздуха, таких как найтрокс , чистый кислород , тримикс или гелиокс . Более простые дайв-компьютеры с найтроксом поддерживают только одну или две газовые смеси для каждого погружения. Другие поддерживают множество различных миксов. [37] Если поддерживается несколько газов, может быть возможность установить те из них, которые будут иметься при погружении, как активные, что позволит компьютеру рассчитать график декомпрессии и время выхода на поверхность, исходя из предположения, что активные газы будут использоваться, когда они будут использованы. оптимальны для декомпрессии. При расчете нагрузки тканевого газа обычно учитывается газ, фактически выбранный дайвером. [21] за исключением случаев, когда имеется система контроля давления в нескольких баллонах, обеспечивающая автоматический выбор газа с помощью компьютера. [36]
Большинство подводных компьютеров рассчитывают декомпрессию для подводного плавания с открытым контуром , где пропорции дыхательных газов постоянны для каждой смеси: это подводные компьютеры с «постоянной долей». Другие компьютеры для дайвинга предназначены для моделирования газов в аквалангах с замкнутым контуром ( ребризерах для дайвинга ), которые поддерживают постоянное парциальное давление газов за счет изменения пропорций газов в смеси: это компьютеры для дайвинга с «постоянным парциальным давлением». Их можно переключить в режим постоянной дроби, если дайвер выпрыгнет и разомкнет цепь. [21] Существуют также подводные компьютеры, которые отслеживают парциальное давление кислорода в режиме реального времени в сочетании с выбранной пользователем смесью разбавителей, чтобы обеспечить обновленный анализ смеси в реальном времени, который затем используется в алгоритме декомпрессии для предоставления информации о декомпрессии. [17] [19]
Компьютеры для фридайвинга [ править ]
Подводный компьютер автоматически записывает детали погружения, пока дайвер находится под водой, а также длину интервала на поверхности между погружениями. Он записывает каждое погружение, поэтому ведется запись количества погружений. Это полезно для обеспечения достаточного интервала между поверхностями и удаления скоплений углекислого газа. [38]
Время интервалов на поверхности также полезно контролировать, чтобы избежать тараваны , декомпрессионной болезни фридайвинга. Подводный компьютер также является наиболее эффективным способом уведомить дайвера о глубине, на которой должно начаться свободное падение, с помощью сигнала тревоги свободного падения. мониторинг скорости спуска и подъема, а также проверка максимальной глубины также полезны при тренировке эффективности. [39]
Доступны два типа компьютеров для фридайвинга: те, которые предназначены для фридайвинга, и те, которые также являются компьютерами для декомпрессии с аквалангом, с режимом фридайвинга. Секундомер полезен для измерения статического апноэ, в некоторых моделях в качестве опции можно использовать аккумуляторные батареи, а GPS может быть полезен подводным охотникам, которые хотят отметить место и вернуться к нему позже. Некоторые модели оснащены пульсометром. [40]
Дополнительный функционал и возможности [ править ]



Некоторые дайв-компьютеры предоставляют дополнительные функции, как правило, подмножество перечисленных ниже:
- Анализатор кислорода в дыхательных газах [16]
- Электронный компас [16]
- Калькулятор смешивания газов [16]
- Глобальный навигационный спутниковый приемник (работает только на поверхности) [16]
- Люксметр [16]
- Индикатор лунной фазы (полезен для оценки приливных условий) [16]
- Магнитометр (для обнаружения черных металлов) [16]
- Угол тангажа и крена [16]
- Секундомер [16]
- Время суток во втором часовом поясе [16]
- Время всплытия еще через 5 минут на текущей глубине и текущем газе. [41]
- Режим манометра (отменяет мониторинг декомпрессии, просто записывает и отображает глубину и время, а дайверу предоставляется возможность контролировать декомпрессию с помощью следующих таблиц). [16] Выбор режима манометра может сбросить записи насыщения тканей до значений по умолчанию, что сделает недействительными любые дальнейшие расчеты декомпрессии до тех пор, пока дайвер не достигнет полной десатурации. [21]
- Воздушная интеграция (ИИ), также известная как интеграция газа : – Некоторые дайв-компьютеры предназначены для измерения, отображения и контроля давления в одном или нескольких водолазных баллонах . Компьютер либо подключается к первой ступени шлангом высокого давления, либо использует беспроводное соединение. датчик давления на первой ступени регулятора для обеспечения беспроводного сигнала данных, указывающего оставшееся давление в баллоне. Сигналы кодируются, чтобы исключить риск того, что компьютер одного дайвера уловит сигнал от датчика другого дайвера или помех от других источников. [42] Некоторые дайв-компьютеры могут принимать сигнал от более чем одного удаленного датчика давления. [11] Ratio iX3M Tech и другие устройства могут обрабатывать и отображать значения давления от 10 датчиков. [36]
- Изменение рабочей нагрузки алгоритма декомпрессии на основе скорости потребления газа от встроенного монитора давления газа. [2]
- Монитор сердечного ритма с выносным датчиком. Это также можно использовать для изменения алгоритма декомпрессии с учетом предполагаемой рабочей нагрузки. [2]
- Графическое отображение расчетного напряжения инертного газа в тканях во время и после погружения. [21]
- Индикация рассчитанного потолка декомпрессии в дополнение к более обычной глубине следующей остановки. Влияние на риск декомпрессии следования за потолком вместо того, чтобы оставаться ниже глубины остановки, неизвестно, но глубины остановки выбираются произвольно для расчета таблиц декомпрессии, а время, проведенное на любой глубине ниже указанной глубины потолка, обрабатывается по тому же алгоритму. . [21]
- Отображение перенасыщения ограничивающей ткани в процентах от значения М в случае немедленного всплытия. [21] Это индикатор риска декомпрессии в случае аварийного всплытия.
- Отображение текущего перенасыщения ограничивающих тканей в процентах от значения М во время всплытия. [21] Это индикатор декомпрессионного стресса и риска в режиме реального времени.
- Несколько активных газов для разбавителя открытого и закрытого контура. [21]
- Отключение газовых опций во время погружения в случае потери газа. [21] Это заставит компьютер пересчитать расчетное время всплытия без деактивированных газов.
- Определение нового газа во время погружения, чтобы можно было рассчитать декомпрессию газа, подаваемого другим дайвером. [21]
- Состояние заряда аккумулятора. [16] [21]
- Альтернативные алгоритмы декомпрессии. [21] [17]
Особенности и аксессуары некоторых моделей:
- Пьезоэлектрические кнопки (без движущихся частей) [21] [15]
- Пользовательский ввод посредством направленного нажатия [15]
- Аккумуляторные батареи. [16]
- Беспроводная зарядка. [18]
- Дополнительные типы батарей. Например, в Shearwater Perdix и Petrel 2 можно использовать щелочные элементы на 1,5 В или литиевые элементы на 3,6 В при условии, что они имеют одинаковый физический формат (AA). [43]
- Сменные пользователем батареи. [43]
- Резервирование батареи. [15]
- Пользовательские цвета дисплея (полезно для дальтоников) и переменная яркость. [21] [16]
- Инверсия экрана для двустороннего использования устройств со вставными кабельными соединениями для кислородных мониторов. [19] [21]
- Проекционный дисплей, крепящийся к маске или мундштуку. (ЗАНУДА) [44]
- Беспроводная загрузка данных журнала погружений. [21]
- Обновление прошивки через Интернет через Bluetooth или USB-кабель со смартфона или персонального компьютера. [21] [16]
- Отображение подсказок по изменению настроек. [21]
- Двойные ремни или банджи-ремни для повышения безопасности. [21]
- Удлинители ремешка для компьютеров формата наручных часов, позволяющие носить их на предплечье громоздких гидрокостюмов.
- Ремни послепродажного обслуживания для повышения безопасности.
- Защитные пленки для экрана в виде самоклеящейся прозрачной пластиковой пленки или жесткой прозрачной пластиковой крышки. [21]
- Программное обеспечение для загрузки, отображения и анализа зарегистрированных данных. Большинство загружаемых компьютеров для дайвинга имеют собственное приложение, и многие из них также могут взаимодействовать с программным обеспечением с открытым исходным кодом, таким как Subsurface . Некоторые могут скачать и загрузить через смартфон в облако. [18]
Размещенные смартфоны [ править ]
Смартфоны в подводных корпусах, на которых установлено приложение для мониторинга декомпрессии, также смогут снимать фотографии или видео, при условии, что корпус подходит. [13]
Безопасность и надежность [ править ]
Простота использования подводных компьютеров позволяет дайверам совершать сложные погружения без особого планирования. Дайверы могут полагаться на компьютер вместо планирования и мониторинга погружений. Подводные компьютеры предназначены для снижения риска декомпрессионной болезни и облегчения мониторинга профиля погружения. Интеграция дыхательного газа, если таковая имеется, позволяет упростить мониторинг оставшегося запаса газа, а предупреждения могут предупредить дайвера о некоторых ситуациях высокого риска, но дайвер остается ответственным за планирование и безопасное выполнение плана погружения. Компьютер не может гарантировать безопасность и отслеживает лишь часть ситуации. Дайвер должен оставаться в курсе остального путем личного наблюдения и внимания к текущей ситуации. Подводный компьютер также может выйти из строя во время погружения из-за неисправности или неправильного использования. [45]
отказа отказов Виды и вероятность
Во время погружения дайв-компьютер может выйти из строя. Производители не обязаны публиковать статистику надежности и обычно включают в руководство пользователя только предупреждение о том, что они используются на собственный риск дайвера. Надежность со временем заметно улучшилась, особенно аппаратного обеспечения. [46]
Аппаратные сбои [ править ]
Механические и электрические неисправности:
- Утечки, приводящие к попаданию воды в электронные компоненты, могут быть вызваны:
- Треснувшая лицевая панель, скорее всего, из-за твердого, устойчивого к царапинам стекла и сапфира, используемых в часах. Они прочные, но хрупкие и могут разбиться при ударе при достаточно жестком точечном контакте.
- Нарушение герметичности может произойти в местах соединений, вероятно, чаще всего в месте замыкания батареи, поскольку оно обычно чаще всего нарушается. В компьютерах с батареями, обслуживаемыми пользователем, часто используется двойное уплотнительное кольцо корпуса для обеспечения более надежного уплотнения.
- Неисправности кнопок — одна из наиболее частых проблем, некоторые модели особенно подвержены ей. Иногда неисправность проявляется в виде утечек, но чаще всего переключатель не размыкается, что иногда является проблемой усталости. Чтобы избежать этой проблемы, иногда используются чувствительные к давлению переключатели без движущихся частей.
- Отказы в схемах, кроме отказов переключателей, часто из-за утечек воды или батареи, вызывающих внутреннюю коррозию.
- Неисправность аккумулятора, например, неожиданная разрядка, утечка или неправильная зарядка. Внутренние перезаряжаемые батареи заменяют меньший риск протечек воды более высоким риском деградации батареи с течением времени.
- Неперезаряжаемые литиевые батареи могут взорваться при неправильном использовании в подводном компьютере с возможностью зарядки. [47]
Этот раздел нуждается в расширении . Вы можете помочь, добавив к нему . ( июнь 2021 г. ) |
и проблемы надежностью с Сбои программного обеспечения
Было несколько случаев, когда подводные компьютеры отзывались из-за серьезных проблем с безопасностью в программном обеспечении или заводской калибровке. [48] Раньше для подводных компьютеров требовалось обновление программного обеспечения на заводе или у утвержденного агента. Ситуация изменилась, и с 2024 года можно будет обновлять прошивку через Интернет, через Bluetooth или аналогичную процедуру. [21]
Серия подводных компьютеров Uwatec Aladin Air X NitrOx, выпущенная в 1995 году, была отозвана в 2003 году из-за неисправного программного обеспечения, которое неправильно рассчитало время десатурации, что привело как минимум к семи случаям DCS, связанным с их использованием. [49] Это не единственный отзыв из-за неисправного программного обеспечения или калибровки: Suunto D6 и D9 были отозваны в 2006 году, Oceanic Versa Pro 2A в 2006 году и компьютеры Dacor Darwin в 2005 году, но о травмах не сообщалось, и устройства были отозваны относительно вскоре после сообщалось о проблемах. [50] [51] [52] Отзыв Uwatec Aladin Air X Nitrox произошел во время группового иска, а также после нескольких связанных с ним исков против компании и нескольких предполагаемых сокрытий, начиная с 1996 года. [53] [54] [55] [56] Дело было урегулировано накануне суда. [57]
Неотъемлемый риск [ править ]
Основная проблема при разработке алгоритмов декомпрессии как для подводных компьютеров, так и для создания таблиц декомпрессии заключается в том, что процессы поглощения и выделения газа под давлением в организме человека до сих пор полностью не изучены. Кроме того, риск декомпрессионной болезни также зависит от физиологии , физической подготовки, состояния и здоровья отдельного дайвера. Показатели безопасности большинства подводных компьютеров показывают, что при использовании в соответствии с инструкциями производителя и в рекомендуемом диапазоне глубин риск декомпрессионной болезни невелик. [7]
Персональные настройки для настройки консервативности алгоритма доступны для большинства дайв-компьютеров. Они могут быть введены как нераскрытые личные факторы, как приведение к М-значениям по фиксированному коэффициенту, по коэффициенту градиента или путем выбора предельного размера пузырька в моделях VPM и RGBM. Персональные настройки компьютеров для отдыха обычно дополняют факторы консерватизма, запрограммированные в алгоритм производителем. Компьютеры для технического дайвинга, как правило, предоставляют более широкий диапазон выбора по усмотрению пользователя и выдают предупреждения о том, что дайвер должен убедиться, что он понимает, что он делает, и связанный с этим риск, прежде чем переходить к умеренно консервативным заводским настройкам. [21] [17]
Человеческая ошибка [ править ]

Многие подводные компьютеры имеют меню, различные выбираемые параметры и различные режимы отображения, которые управляются небольшим количеством кнопок. Управление дисплеем компьютера различается у разных производителей, а в некоторых случаях и у моделей одного и того же производителя. [1] [16] [21] Дайверу может понадобиться информация, не отображаемая на экране по умолчанию во время погружения, а последовательность кнопок для доступа к информации может быть не сразу очевидна. Если дайвер ознакомится с управлением компьютером во время погружений, когда информация не является критичной, прежде чем полагаться на него при более сложных погружениях, уменьшится риск путаницы, которая может привести к несчастному случаю.
Большинство подводных компьютеров поставляются с заводскими настройками по умолчанию, обеспечивающими консервативность алгоритма, и максимальное парциальное давление кислорода, которые, по мнению юрисконсультов производителя, являются достаточно безопасными. Некоторые из них могут быть изменены в соответствии с предпочтениями пользователя, что повлияет на риск. Руководство пользователя обычно содержит инструкции по настройке и возврату к заводским настройкам, а также некоторую информацию о том, как выбрать соответствующие пользовательские настройки. Ответственность за надлежащее использование пользовательских настроек лежит на пользователе, который устанавливает или разрешает эти настройки. Существует риск того, что пользователь сделает неправильный выбор из-за непонимания или ошибки ввода. [16] [21] [1]
В некоторых случаях можно легко выбрать неправильную настройку, случайно дважды нажав одну и ту же кнопку холодными пальцами в толстых перчатках. Процесс исправления настроек может быть незнакомым и требовать значительно большего количества нажатий кнопок в то время, когда есть другие важные дела, требующие внимания. Примером ошибки такого типа может быть случайный выбор кислорода в качестве газа для дыхания вместо газа для путешествий, поскольку кислород находится в верхней части списка вариантов газа. Это ошибка, которую необходимо исправить как можно скорее, поскольку она вызовет срабатывание сигнализации и приведет к небезопасным ошибкам расчета декомпрессии. Подтверждающие сообщения во время переключения газов могут снизить риск ошибки пользователя за счет дополнительного нажатия кнопки. [16]
Стратегии управления и смягчения последствий [ править ]
Если дайвер отслеживал состояние декомпрессии и находится в бездекомпрессионных пределах, сбой компьютера можно устранить, просто всплыв на поверхность с рекомендованной скоростью всплытия и, если возможно, сделав короткую остановку безопасности у поверхности. Однако если компьютер может выйти из строя в то время, когда дайвер вынужден выполнить декомпрессию или не может совершить прямое всплытие, разумно использовать некоторую форму резервного копирования. Подводный компьютер можно считать критически важным для безопасности оборудованием, когда существует значительная необходимость декомпрессии, поскольку отказ без какой-либо резервной системы может подвергнуть дайвера риску серьезной травмы или смерти.
Дайвер может иметь при себе резервный подводный компьютер. Вероятность одновременного выхода из строя обоих на порядки ниже. Использование резервного оборудования той же модели, что и основное, упрощает использование и снижает вероятность ошибок пользователя, особенно в стрессовых ситуациях, но делает резервирование оборудования менее статистически независимым . Статистические данные о частоте отказов подводных компьютеров не являются общедоступными.
При погружении с хорошо отрегулированной системой напарников , где оба дайвера следуют одинаковым профилям погружений и используют одни и те же газы, компьютер для погружений напарника может быть достаточной резервной копией. [1]
Профиль погружения можно спланировать перед погружением и внимательно следить за ним, чтобы можно было вернуться к запланированному графику в случае сбоя компьютера. Это подразумевает наличие резервного таймера и глубиномера, иначе график будет бесполезен. Это также требует от дайвера консервативного следования запланированному профилю. [58] [1]
Некоторые организации, такие как Американская академия подводных наук, рекомендуют составлять план погружения до погружения, а затем следовать ему на протяжении всего погружения, если погружение не будет прервано. Этот план погружения должен находиться в пределах таблиц декомпрессии. [ нужны разъяснения ] для увеличения запаса прочности и обеспечения резервного расписания декомпрессии на основе таблиц погружений на случай отказа компьютера под водой. [1] [59] [60] Недостаток этого крайне консервативного использования подводных компьютеров заключается в том, что при таком использовании подводный компьютер используется просто как донный таймер , а преимущества вычисления состояния декомпрессии в реальном времени – первоначальная цель подводных компьютеров – приносятся в жертву. [7] Этой рекомендации нет в версии « Стандартов научного дайвинга AAUS: Руководство» 2018 года . [61]
Дайвер, желающий еще больше снизить риск декомпрессионной болезни, может принять дополнительные меры предосторожности, например одно или несколько из:
- Используйте подводный компьютер с относительно консервативной моделью декомпрессии.
- Добавьте дополнительный консерватизм в алгоритм, выбрав более консервативную персональную настройку или используя настройку большей высоты, чем указывает фактическая высота погружения. [58]
- Добавьте дополнительные глубокие остановки безопасности во время глубокого погружения (эффективность этого подхода не подтверждена экспериментами). [58]
- Совершите медленный подъем. Это уменьшит декомпрессионное напряжение на ранних этапах всплытия, но увеличит общее время выхода на поверхность, если декомпрессионное напряжение на более поздних этапах всплытия не будет увеличено.
- Добавьте дополнительные неглубокие остановки безопасности или оставайтесь на остановках дольше, чем требует компьютер.
- Между погружениями делайте длинный интервал на поверхности. Это снизит риск при условии, что расчеты дегазации алгоритма точны и консервативны.
- Если вы используете резервный компьютер, запустите один из них с низким уровнем консерватизма, чтобы указать на самый быстрый приемлемый риск всплытия в случае чрезвычайной ситуации, а другой — с предпочитаемым дайвером консерватизмом для лично приемлемого риска, когда нет непредвиденных обстоятельств и спешки на поверхность. Дайвер всегда может выбрать большую декомпрессию, чем указано компьютером, чтобы снизить риск декомпрессионной болезни, не подвергаясь штрафам за последующие погружения. Некоторые дайв-компьютеры могут быть настроены на другой коэффициент градиента во время погружения, что имеет тот же эффект, если дайвер в состоянии стресса может вспомнить, как выполнить настройку, а некоторые компьютеры можно настроить на отображение максимального значения перенасыщения тканей для немедленного всплытия. . [21] [62]
- Продолжайте дышать газом, обогащенным кислородом, после всплытия на поверхность, либо в воде во время ожидания лодки, либо после выхода из воды, либо и то, и другое.
Управление нарушениями [ править ]
Нарушения пределов безопасности, отображаемые на дисплее компьютера, могут произойти во время погружения по разным причинам, включая ошибки пользователя и обстоятельства, не зависящие от дайвера. Как это обрабатывается, зависит от модели декомпрессии, того, как алгоритм реализует модель, и того, как производитель решает интерпретировать и применять критерии нарушения.
Многие компьютеры переходят в «режим блокировки» на 24–48 часов, если дайвер нарушает ограничения безопасности, установленные производителем, чтобы воспрепятствовать продолжению погружения после того, что производитель считает небезопасным погружением. В режиме блокировки эти компьютеры не будут работать до тех пор, пока период блокировки не закончится. [63] Обычно это разумная реакция, если блокировка инициируется после погружения, поскольку алгоритм будет использоваться вне области применения, и производитель разумно предпочтет избежать дальнейшей ответственности за его использование до тех пор, пока ткани не будут считаться ненасыщенными. Когда происходит блокировка под водой, дайвер остается без какой-либо информации о декомпрессии в тот момент, когда она больше всего необходима. Например, Apeks Quantum перестанет отображать глубину, если будет превышен предел глубины в 100 м, но заблокируется через 5 минут после всплытия из-за пропущенной декомпрессионной остановки. Технический тримикс-компьютер Scubapro/Uwatec Galileo переключится в манометрический режим на глубине 155 м после предупреждения, после чего дайвер не будет получать информацию о декомпрессии. [64] Другие компьютеры, например, VR3 компании Delta P, Cochran NAVY и линейка Shearwater , продолжат работать, обеспечивая функцию «наилучшего предположения», одновременно предупреждая дайвера о пропущенной остановке или нарушении потолка. [21] [65]
Некоторые подводные компьютеры чрезвычайно чувствительны к нарушениям указанной глубины декомпрессионной остановки. HS Explorer запрограммирован на зачет времени, проведенного даже немного (0,1 метра) выше указанной глубины остановки, всего за 1/60 номинальной скорости. Нет никакой теоретической или экспериментальной основы, оправдывающей это жесткое ограничение. Другие, такие как Shearwater Perdix, полностью учитывают любую декомпрессию, выполненную ниже расчетного потолка декомпрессии, который может отображаться как опция, выбираемая пользователем, и всегда равна или меньше указанной глубины остановки. Эта стратегия поддерживается математическими расчетами модели, но имеется мало экспериментальных данных о практических последствиях, поэтому дается предупреждение. Нарушение рассчитанного потолка декомпрессии вызывает сигнал тревоги, который автоматически отменяется, если дайвер немедленно опускается ниже потолка. Ratio iX3M выдаст предупреждение, если указанная глубина остановки будет нарушена на 0,1 м или более, но неясно, как это повлияет на алгоритм. Во многих случаях руководство пользователя не предоставляет информации о том, насколько чувствителен алгоритм к точной глубине, какие штрафы могут быть понесены за незначительные несоответствия или какая теоретическая основа оправдывает штраф. [21] [17] [63] Чрезмерная реакция на нарушение глубины остановки ставит дайвера в ненужное невыгодное положение, если есть срочная необходимость всплытия, и ни один компьютер не может гарантировать свободу от декомпрессионной болезни, даже если отображаемый профиль всплытия точно соблюдается.
Более сложная функциональность сопровождается более сложным кодом, который с большей вероятностью будет содержать необнаруженные ошибки, особенно в некритических функциях, где тестирование может быть не таким строгим. Тенденция заключается в том, чтобы иметь возможность загружать обновления прошивки онлайн, чтобы устранять ошибки по мере их обнаружения и исправления. [21] В более ранних компьютерах некоторые ошибки требовали восстановления заводских настроек. [55]
Существуют обстоятельства, при которых блокировка при всплытии не является подходящей, полезной, безопасной или разумной мерой. Если пещерный дайвер всплывает внутри пещеры и компьютер блокируется в результате нарушения, у дайвера может не остаться иного выбора, кроме как совершить обратное погружение без информации, которую можно было бы разумно ожидать от компьютера, что ставит дайвер подвергается значительно более серьезному риску, чем это абсолютно необходимо. Это очень редкое явление, но это сбой, который резервный компьютер не может устранить. В зависимости от обстоятельств и конкретного компьютера его можно перевести в режим измерения, который, по крайней мере, предоставит данные о глубине и времени.
Избыточность [ править ]
Один компьютер, используемый дайверами, не может точно записать профиль погружения второго дайвера, и поэтому его статус декомпрессии будет ненадежным и, вероятно, неточным. В случае сбоя компьютера во время погружения записи компьютера напарника могут быть наилучшей доступной оценкой состояния декомпрессии и использоваться в качестве руководства по декомпрессии в чрезвычайных ситуациях. Дальнейшее погружение после всплытия в таких условиях подвергает дайвера неизвестному дополнительному риску. Некоторые дайверы имеют с собой запасной компьютер, позволяющий реализовать такую возможность. Резервный компьютер будет хранить всю историю недавнего воздействия давления, и продолжение погружения после неисправности одного компьютера не повлияет на риск при условии, что второй компьютер продолжает работать правильно. Также можно настроить консерватизм на резервном компьютере, чтобы обеспечить максимально быстрое приемлемое всплытие в случае чрезвычайной ситуации, при этом основной компьютер будет настроен на предпочтительный уровень риска дайвера, если эта функция недоступна на компьютере. В обычных обстоятельствах основной компьютер будет использоваться для управления скоростью всплытия. [8]
История [ править ]

В 1951 году Управление военно-морских исследований профинансировало проект совместно с Океанографическим институтом Скриппса теоретической разработки прототипа декомпрессионного компьютера. Два года спустя два исследователя Скриппса, Гровс и Монк, опубликовали статью, в которой указаны необходимые функции декомпрессионного устройства, которое должен иметь при себе дайвер: оно должно рассчитывать декомпрессию во время многоуровневого погружения; он должен учитывать остаточную нагрузку азотом от предыдущих погружений; и на основе этой информации указать профиль безопасного всплытия с лучшим разрешением, чем таблицы декомпрессии. Они предложили использовать электрический аналоговый компьютер для измерения декомпрессии и потребления воздуха. [66]
Пневматические аналоги [ править ]
Прототип механического аналога Foxboro Decomputer Mark I был произведен компанией Foxboro в 1955 году и оценен Экспериментальным водолазным подразделением ВМС США в 1957 году. [67] Mark 1 имитировал две ткани, используя пять калиброванных пористых керамических резисторов потока и пять сильфонных приводов, которые приводили в движение иглу, которая указывала на риск декомпрессии во время всплытия, перемещаясь к красной зоне на циферблате дисплея. ВМС США сочли устройство слишком противоречивым. [66]
Первый для отдыха механический аналоговый подводный компьютер , «измеритель декомпрессии», был разработан итальянцами De Sanctis & Alinari в 1959 году и построен их компанией SOS, которая также производила глубиномеры. Измеритель декомпрессии распространялся непосредственно компанией SOS, а также такими фирмами, производящими оборудование для подводного плавания, как Scubapro и Cressi. В принципе, это было очень просто: водонепроницаемая камера, наполненная газом внутри корпуса, перекачивалась в меньшую камеру через полупористое керамическое сопротивление потоку, чтобы имитировать вход и выход газа из одной ткани. Давление в камере измерялось манометром с трубкой Бурдона , откалиброванным для индикации состояния декомпрессии. Устройство функционировало настолько плохо, что его со временем прозвали «бендоматик». [68]
В 1965 году Р.А. Стаббс и DJ Кидд применили свою модель декомпрессии к пневматическому аналоговому декомпрессионному компьютеру. [69] [70] а в 1967 году Брайан Хиллс сообщил о разработке пневматического аналогового декомпрессионного компьютера, моделирующего модель термодинамической декомпрессии . Он моделировал фазовое равновесие вместо более часто используемых критериев ограниченного пересыщения и был задуман как инструмент для управления декомпрессией дайвера на месте на основе выходных данных устройства в реальном времени. Хиллс считал эту модель консервативной. [71]
Впоследствии было изготовлено несколько механических аналоговых измерителей декомпрессии, некоторые с несколькими камерами для имитации воздействия на различные ткани тела, но они были отодвинуты на второй план с появлением электронных компьютеров.
Канадский пневматический аналоговый компьютер DCIEM 1962 года моделировал четыре ткани, приближаясь к таблицам DCIEM того времени. [46]
В GE Decometer 1973 года от General Electric использовались полупроницаемые силиконовые мембраны вместо керамических резисторов потока, что позволяло совершать более глубокие погружения. [46]
Декомпьютер Farallon 1975 года, выпущенный компанией Farallon Industries, Калифорния, моделировал две ткани, но дал результаты, сильно отличающиеся от таблиц ВМС США того времени, и год спустя был снят с производства. [46]
Электрические аналоги [ править ]
Одновременно с механическими симуляторами разрабатывались электрические аналоговые симуляторы, в которых ткани моделировались сетью резисторов и конденсаторов, но они оказались нестабильными при колебаниях температуры и требовали калибровки перед использованием. Они также были громоздкими и тяжелыми из-за размера необходимых батарей. Первым аналоговым электронным измерителем декомпрессии был Tracor, созданный в 1963 году компанией Texas Research Associates. [66] [46]
Цифровой [ править ]
Первым цифровым подводным компьютером была лабораторная модель XDC-1, основанная на настольном электронном калькуляторе, преобразованная Киддом и Стаббсом для работы с четырехтканным алгоритмом DCIEM в 1975 году. Он использовал пневмофатометра данные о глубине, поступающие от водолазов с поверхности . [46]
С 1976 года компания Dacor, производящая оборудование для дайвинга, разработала и продала цифровой подводный компьютер, который использовал поиск по таблицам на основе сохраненных таблиц ВМС США, а не модели газонасыщения тканей в реальном времени. Подводный компьютер Dacor (DDC) отображал на светодиодах следующие данные: текущая глубина; истекшее время погружения; поверхностный интервал; максимальная глубина погружения; данные повторных погружений; скорость всплытия с предупреждением о превышении 20 метров в минуту; предупреждение о достижении бездекомпрессионного предела; сигнальная лампа низкого заряда батареи; и необходима декомпрессия. [46]
Затем канадская компания CTF Systems Inc. разработала XDC-2 или CyberDiver II (1980), который также использовал поиск по таблице, а XDC-3, также известный как CyberDiverIII, который использовал микропроцессоры, измерял давление в баллоне с помощью шланга высокого давления. , рассчитанная нагрузка на ткани с использованием модели Кидда-Стаббса и оставшееся время без остановок. Он имел светодиодный матричный дисплей, но был ограничен источником питания: четырех батарей напряжением 9 В хватало всего на 4 часа, а весил он 1,2 кг. Около 700 моделей XDC было продано с 1979 по 1982 год. [46]
В 1979 году XDC-4 уже можно было использовать со смесями газов и различными моделями декомпрессии с использованием многопроцессорной системы, но он был слишком дорогим, чтобы оказать влияние на рынок. [46]
В 1982/1983 гг. [46] Hans Hass - DecoBrain I , разработанный Divetronic AG швейцарским стартапом , стал первым декомпрессионным компьютером для дайвинга, способным отображать информацию, которую выдают сегодняшние компьютеры для дайвинга. Он работал с сохраненной таблицей декомпрессии. DecoBrain II был основан на Альберта А. Бюльмана (ZH-L12). 16-камерной модели ткани [72] который Юрг Херманн, инженер-электронщик, реализовал в 1981 году на одном из первых однокристальных микроконтроллеров Intel в рамках своей диссертации в Швейцарском федеральном технологическом институте .
Orca Edge 1984 года был ранним примером компьютера для дайвинга. [72] Разработанный Крейгом Баршингером , Карлом Хаггинсом и Полом Хейнмиллером, EDGE не отображал план декомпрессии, а вместо этого показывал потолок или так называемую «безопасную глубину всплытия». Недостаток заключался в том, что, если дайвер оказался лицом к потолку, он не знал, как долго ему придется декомпрессировать. Однако большой уникальный дисплей Edge с 12 полосками тканей позволил опытному пользователю сделать разумную оценку своих обязательств по декомпрессии.
В 1980-е годы технология быстро улучшилась. В 1983 году Orca Edge стал доступен как первый коммерчески жизнеспособный компьютер для дайвинга. Модель была основана на таблицах погружений ВМС США, но не рассчитывала план декомпрессии. Однако производственная мощность составляла всего одну единицу в день. [73]
В 1984 году был создан водолазный компьютер ВМС США (UDC), основанный на 9-тканной модели Эдварда Д. Тельмана из Экспериментального водолазного подразделения ВМС (NEDU) в Панама-Сити, который разработал таблицы ВМС США. Компания Divetronic AG завершила разработку УДК, начатую главным инженером Кирком Дженнингсом из Центра военно-морских океанских систем на Гавайях и Тельманном из NEDU, адаптировав Deco Brain для использования в боевых действиях ВМС США и для своего 9-тканного МК. Модель газовой смеси -15 по контракту на НИОКР ВМС США. [ нужна ссылка ]
Orca Industries продолжила совершенствовать свою технологию, выпустив в 1987 году Skinny-dipper для выполнения расчетов при повторяющихся погружениях. [74] Позже в 1989 году они выпустили компьютер Delphi, который включал в себя расчеты погружений на высоте, а также запись профиля. [74]
В 1986 году финская компания Suunto выпустила SME-ML. [73] Этот компьютер имел простую конструкцию, вся информация отображалась на дисплее. Он был прост в использовании и мог хранить 10 часов погружений, к которым можно было получить доступ в любое время. [66] В SME-ML использовался 9-камерный алгоритм, используемый для таблиц ВМС США, с полупериодами тканей от 2,5 до 480 минут. Время автономной работы — до 1500 часов, максимальная глубина — 60 м. [73]
В 1987 году швейцарская компания UWATEC вышла на рынок с «Аладином», который представлял собой громоздкое и довольно прочное серое устройство с довольно маленьким экраном, максимальной глубиной 100 метров и скоростью всплытия 10 метров в минуту. Он хранил данные о 5 погружениях и имел заменяемую пользователем батарею 3,6 В, которой хватало примерно на 800 погружений. Некоторое время это был самый распространенный подводный компьютер, особенно в Европе. Более поздние версии имели батарею, которую пришлось менять производителю, и неточный индикатор заряда батареи, но бренд оставался популярным. [46] [73]
В 1989 году Dacor Microbrain Pro Plus утверждал, что имеет первую интегрированную функцию планирования погружений, первое EEPROM, хранящее полные данные о погружениях за последние три погружения, основные данные за 9999 погружений, а также запись максимальной достигнутой глубины, совокупного общего времени погружений и общего количества погружений. ныряет. На ЖК-дисплее графически отображается оставшееся бездекомпрессионное время. [75]
Общее принятие [ править ]
Даже к 1989 году появление подводных компьютеров не встретило широкого признания. [1] В сочетании с общим недоверием в то время к использованию какой-либо электроники, от которой могла зависеть ваша жизнь под водой, были также высказаны возражения, начиная от дайв-курортов, которые считали, что увеличение времени пребывания на дне нарушит их расписание лодки и еды, до тех, кто испытывал дайверы считали, что увеличение времени пребывания на дне, несмотря на утверждения, приведет к увеличению числа случаев декомпрессионной болезни . [ нужна ссылка ] Понимая необходимость четкого общения и дискуссий, Майкл Лэнг из Калифорнийского государственного университета в Сан-Диего и Билл Гамильтон из Hamilton Research Ltd. собрали под эгидой Американской академии подводных наук разнообразную группу, в которую входили большинство специалистов по подводным компьютерам. дизайнеры и производители, некоторые из самых известных теоретиков и практиков гипербарической медицины, представители агентств любительского дайвинга, сообщества пещерных дайверов и сообщества научного дайвинга. [1]
Основную проблему прояснил Эндрю А. Пилманис в своем вступительном слове: «Очевидно, что подводные компьютеры никуда не денутся, но они все еще находятся на ранних стадиях разработки. С этой точки зрения этот семинар может начать процесс создания стандартные процедуры оценки для обеспечения безопасного и эффективного использования подводных компьютеров в научном дайвинге». [1]
После встречи в течение двух дней участники конференции все еще находились на «ранних стадиях разработки», а «процесс установления стандартных процедур оценки для обеспечения безопасного и эффективного использования подводных компьютеров в научном дайвинге» еще не начался. из Университета Род-Айленда Сотрудник по безопасности дайвинга Филип Шарки и директор по исследованиям и разработкам Orca Edge Пол Хейнмиллер подготовили предложение из 12 пунктов, которое они пригласили присутствующих офицеров по безопасности дайвинга обсудить на вечернем закрытом заседании. Среди присутствующих были Джим Стюарт ( Океанографический институт Скриппса ), Ли Сомерс ( Мичиганский университет ), Марк Флахан ( Государственный университет Сан-Диего ), Вуди Саутерленд ( Университет Дьюка ), Джон Хейн ( Морские лаборатории Мосс-Лэндинга ), Глен Эгстром ( Университет Калифорния, Лос-Анджелес ), Джон Даффи ( Департамент рыболовства и охоты Калифорнии ) и Джеймс Корри ( Секретная служба США ). В течение нескольких часов предложение, подготовленное Шарки и Хейнмиллером, было отредактировано и превратилось в следующие 13 рекомендаций:
- Разрешается использовать только те марки и модели подводных компьютеров, которые специально одобрены Советом по контролю за дайвингом.
- Любой дайвер, желающий получить разрешение на использование подводного компьютера в качестве средства определения статуса декомпрессии, должен обратиться в Совет по контролю дайвинга, пройти соответствующую практическую тренировку и сдать письменный экзамен.
- Каждый дайвер, полагающийся на дайв-компьютер для планирования погружений и указания или определения статуса декомпрессии, должен иметь свое собственное устройство.
- При любом погружении оба дайвера в паре напарников должны следовать наиболее консервативному компьютеру для погружений.
- Если подводный компьютер выходит из строя в любой момент во время погружения, погружение необходимо прекратить и немедленно начать соответствующие процедуры всплытия.
- Дайверу не следует погружаться в течение 18 часов, прежде чем активировать подводный компьютер, чтобы использовать его для управления своим погружением.
- После использования подводного компьютера его нельзя выключать до тех пор, пока он не покажет, что произошла полная дегазация, или пока не пройдут 18 часов, в зависимости от того, что наступит раньше.
- При использовании подводного компьютера неаварийные всплытия должны осуществляться со скоростью, указанной для марки и модели используемого подводного компьютера.
- Скорость всплытия не должна превышать 40 футов в минуту за последние 60 футов.
- Если это возможно, дайверам, использующим подводный компьютер, следует делать остановку на глубине от 10 до 30 футов на 5 минут, особенно при погружениях на глубине менее 60 футов над уровнем моря.
- За любой 18-часовой период может быть совершено только 1 погружение на дайв-компьютере, при котором было превышено NDL таблиц или дайв-компьютера.
- Процедуры повторяющихся и многоуровневых погружений должны начинаться с максимальной запланированной глубины, за которой следуют последующие погружения на более мелкую глубину.
- Многократные глубокие погружения требуют особого внимания.
Как записано в разделе «Сессия 9: Общая дискуссия и заключительные замечания»:
Затем Майк Лэнг возглавил групповое обсуждение, чтобы достичь консенсуса по правилам использования подводных компьютеров. Эти 13 пунктов были тщательно обсуждены и обобщены накануне вечером, так что большая часть дополнительных комментариев была направлена на разъяснение и точность. Следующие пункты представляют собой рекомендации по использованию подводных компьютеров для научного дайверского сообщества. Еще раз было подчеркнуто, что почти все эти рекомендации применимы и к дайверскому сообществу в целом. [1]
После того, как в мастерской AAUS большая часть сопротивления компьютерам для дайвинга рассеялась, было представлено множество новых моделей, технология значительно улучшилась, и компьютеры для дайвинга вскоре стали стандартным оборудованием для подводного плавания. Со временем некоторые из 13 рекомендаций стали неактуальны, поскольку более поздние подводные компьютеры продолжают работать, пока у них есть заряд батареи, и их выключение в основном приводит к отключению дисплея.
Дальнейшее развитие [ править ]
В 1996 году компания Mares выпустила на рынок подводный компьютер с голосовым аудиовыходом, произведенный финской компанией Benemec Oy. [76]
В 2000 году компания HydroSpace Engineering разработала HS Explorer, компьютер Trimix с дополнительным мониторингом P O 2 и алгоритмами двойной декомпрессии, Bühlmann, и первую полную реализацию RGBM. [17]
В 2001 году ВМС США одобрили использование декомпрессионного компьютера Cochran NAVY с алгоритмом VVAL 18 Thalmann для операций специального назначения. [77] [78]
В 2008 году подводный цифровой интерфейс на рынок был выпущен (UDI). Этот подводный компьютер, основанный на модели RGBM, включает в себя цифровой компас, систему подводной связи, которая позволяет дайверам передавать заданные текстовые сообщения, а также сигнал бедствия с возможностью самонаведения. [79]
К 2010 году использование подводных компьютеров для отслеживания статуса декомпрессии стало практически повсеместным среди дайверов-любителей и широко распространилось в научном дайвинге. В Великобритании было доступно 50 моделей от 14 производителей. [2]
Разнообразие и количество доступных дополнительных функций с годами увеличилось. [21] [36]
Корпуса формата наручных часов стали обычным явлением. Они компактны и могут также служить в качестве наручных часов для повседневного ношения, но область дисплея ограничена размером устройства и может быть трудно читаема для дайверов с плохим зрением, а кнопки управления обязательно маленькие, и их может быть неудобно использовать с толстыми перчатки. Срок службы батареи также может быть ограничен доступным объемом. [12]
Корпуса для смартфонов [ править ]
Продаются водонепроницаемые чехлы, в которых используются смартфон, датчики глубины и температуры, а также приложение для декомпрессии, обеспечивающее возможности подводного компьютера. Оценки глубины различаются, но для некоторых заявлено 80 мсв. Для связи между смартфоном и внешними датчиками использовалась беспроводная связь Bluetooth. В спецификациях не могут упоминаться какие-либо проверочные испытания или соответствие стандартам, применимым к снаряжению для дайвинга. На основе платформы смартфона предлагается множество функций. Поддерживаются операционные системы Android и iOS. [13] [80] [81] [82]
Этот раздел нуждается в дополнении: Алгоритмы VPM, Градиентные факторы, DC с открытым исходным кодом (Heinrichs Weikamp), 2012? - стандартные корпуса для смартфонов. Добавлены трюки, некоторые из которых действительно полезны во время погружения, добавлена сложность эксплуатации, интеграция нескольких газов, прогноз выносливости газов, хранение и отображение цифровых карт дайв-сайтов (Mares?). Вы можете помочь, добавив к нему . ( май 2021 г. ) |
Проверка [ править ]
Проверка — это определение того, что дайв-компьютер работает правильно, то есть правильно выполняет запрограммированный алгоритм, и это будет стандартная процедура обеспечения качества, проводимая производителем, в то время как валидация подтверждает, что алгоритм обеспечивает принятый уровень риска. [83] Риск алгоритмов декомпрессии, запрограммированных в дайв-компьютеры, можно оценить несколькими способами, включая испытания на людях, контролируемые пилотные программы, сравнение с профилями погружений с известным риском декомпрессионной болезни и сравнение с моделями риска. [7]
Производительность подводных компьютеров, подвергающихся воздействию профилей с известными результатами для людей. [ редактировать ]
Исследования (2004 г.), проведенные в гипербарической камере Каталины Университета Южной Калифорнии, сравнивали дайв-компьютеры с группой профилей погружений, которые были протестированы на людях или имеют большое количество зарегистрированных рабочих погружений. [84]
Подводные компьютеры были погружены в воду внутри камеры и были проанализированы профили. Оставшееся бездекомпрессионное время или необходимое общее время декомпрессии записывалось с каждого компьютера за 1 минуту до выхода с каждой глубины профиля. Результаты многоуровневого бездекомпрессионного погружения продолжительностью 40 мс «низкого риска» из серии тестов PADI/DSAT RDP. [85] предоставил диапазон от 26 минут оставшегося бездекомпрессионного времени до 15 минут требуемого времени декомпрессии для протестированных компьютеров. Компьютеры, указывающие на необходимость декомпрессии, можно рассматривать как консервативные: следование профилю декомпрессии консервативного алгоритма или настроек подвергает дайвера меньшему риску декомпрессии, но величина этого снижения неизвестна. И наоборот, более агрессивные показания компьютеров, показывающие значительное количество оставшегося бездекомпрессионного времени, подвергнут дайвера большему риску, чем довольно консервативный график PADI/DSAT неизвестной величины. [84]
Сравнительная оценка и валидация [ править ]
Оценку алгоритмов декомпрессии можно провести без необходимости проведения испытаний на людях, установив набор ранее протестированных профилей погружений с известным риском декомпрессионной болезни. Это могло бы обеспечить элементарную основу для сравнения дайв-компьютеров. [7] По состоянию на 2012 год точность компьютерных измерений температуры и глубины может не соответствовать друг другу, что затрудняет этот тип исследований. [86]
Точность отображаемых данных [ править ]
Европейский стандарт «EN13319:2000 Аксессуары для дайвинга. Глубиномеры и комбинированные устройства для измерения глубины и времени. Функциональные требования и требования безопасности, методы испытаний» определяет функциональные требования и требования безопасности, а также стандарты точности для измерения глубины и времени в подводных компьютерах и других приборах, измеряющих глубину воды. по давлению окружающей среды. Это не относится к каким-либо другим данным, которые могут отображаться или использоваться прибором. [87] [88]
Данные о температуре используются для корректировки выходного сигнала датчика давления, который нелинейно зависит от температуры и не так важен, как давление, для алгоритма декомпрессии, поэтому требуется меньший уровень точности. В исследовании, опубликованном в 2021 году, изучалось время отклика, точность и прецизионность компьютеров, измеряющих температуру воды, и было обнаружено, что 9 из 12 моделей имели точность в пределах 0,5 °C при наличии достаточного времени для стабилизации температуры с использованием загруженных данных, полученных при погружениях в открытой воде и во влажной камере. в пресной и морской воде. Известно, что высокая температура окружающего воздуха влияет на температурные профили в течение нескольких минут после погружения, в зависимости от расположения датчика давления, поскольку передача тепла от корпуса компьютера к воде замедляется такими факторами, как плохая теплопроводность пластикового корпуса, внутреннее тепловыделение и установка отверстия датчика в контакте с изоляцией гидрокостюма. Датчик, установленный на краю в небольшом металлическом корпусе, будет отслеживать изменения температуры окружающей среды гораздо быстрее, чем датчик, установленный на основании в большом толстостенном пластиковом корпусе, при этом оба они обеспечивают точные сигналы давления. [89]
Более ранний обзор 49 моделей декомпрессионного компьютера, опубликованный в 2012 году, показал широкий диапазон ошибок в отображении глубины и температуры. Измерение температуры в первую очередь используется для обеспечения правильной обработки сигнала датчика глубины, поэтому измерение температуры датчика давления является целесообразным, а медленная реакция на внешнюю температуру окружающей среды не имеет отношения к этой функции, при условии, что сигнал давления обрабатывается правильно. [86]
Почти все протестированные компьютеры зафиксировали глубину, большую, чем можно было бы указать на фактическое давление, и были заметно неточными (до 5%) для некоторых компьютеров. Имели место значительные различия в разрешенном времени безостановочного пребывания на дне, но для участков с квадратным профилем значения, полученные с помощью компьютера, имели тенденцию быть более консервативными, чем таблицы, на глубинах менее 30 м, но менее консервативными на глубинах 30–50 м. Безостановочные ограничения, генерируемые компьютерами, сравнивались с безостановочными пределами таблиц DCIEM и RNPL. [86] Отклонение от приложенного глубинного давления, измеренного в декомпрессионной камере, где точность приборов для измерения давления периодически калибруется до довольно высокой точности (±0,25%), показало ошибки от -0,5 до +2 м с тенденцией к увеличению с глубиной. [86]
Похоже, что модели компьютеров одного и того же производителя имеют тенденцию отображать аналогичные различия в отображаемом давлении, что исследователи интерпретировали как предположение о том, что смещение может быть преднамеренным критерием проектирования, но также может быть артефактом использования аналогичных компонентов и программное обеспечение от производителя. Важность этих ошибок для целей декомпрессии неизвестна, поскольку для расчетов декомпрессии используется давление окружающей среды, которое измеряется напрямую, но не отображается. Глубина рассчитывается как функция давления и не учитывает изменения плотности в толще воды. Фактическое линейное расстояние под поверхностью более актуально для научных измерений, тогда как отображаемая глубина более актуальна для судебно-медицинских экспертиз подводных компьютеров, а также для дайверов, использующих компьютер в манометрическом режиме со стандартными таблицами декомпрессии, которые обычно настроены на давление в футах или метров водного столба . [86]
соображения Эргономические


Если дайвер не может эффективно использовать подводный компьютер во время погружения, он не имеет никакой ценности, кроме как в качестве регистратора профиля погружения . эргономические аспекты дисплея и системы ввода управления ( пользовательский интерфейс Для эффективного использования устройства важны ). Неправильное понимание отображаемых данных и невозможность ввести необходимые данные могут привести к опасным для жизни проблемам под водой. Руководство по эксплуатации недоступно для справки во время погружения, поэтому либо дайвер должен изучить и попрактиковаться в использовании конкретного устройства, прежде чем использовать его в сложных ситуациях, либо операция должна быть достаточно интуитивной, чтобы ее можно было отработать на месте. дайвером, который в этот момент может находиться в состоянии стресса. Хотя некоторые производители заявляют, что их устройства просты и интуитивно понятны в управлении, количество функций, расположение дисплея и последовательность нажатия кнопок заметно различаются у разных производителей и даже между разными моделями одного и того же производителя. Количество кнопок, которые может потребоваться нажать во время погружения, обычно варьируется от двух до четырех, а расположение и последовательность нажатия кнопок могут усложняться. Опыт использования одной модели может оказаться бесполезным при подготовке дайвера к использованию другой модели, и может потребоваться значительный этап переобучения. Предыдущий опыт может даже стать недостатком, когда знание одной системы может сбить с толку дайвера, которому в условиях стресса необходимо использовать другую систему. Как технические, так и эргономические аспекты компьютера для погружений важны для безопасности дайвера. Подводный Разборчивость дисплея может существенно варьироваться в зависимости от подводных условий и остроты зрения отдельного дайвера. Если метки, идентифицирующие выходные данные и пункты меню, неразборчивы в тот момент, когда они необходимы, они не помогут. [22] На разборчивость сильно влияют размер текста, шрифт , яркость и контрастность. Цвет может помочь в распознавании значения, например, в различении нормальных и ненормальных состояний, но может ухудшить разборчивость, особенно для людей с дальтонизмом , а мигающий дисплей требует внимания к предупреждению или тревоге, но отвлекает от другой информации. [90]
Несколько критериев были определены как важные эргономические соображения: [22]
- Простота чтения важных данных, в том числе:
- Не осталось времени декомпрессии
- Текущая глубина
- Прошедшее время с начала погружения (время выполнения)
- Если требуется декомпрессия, общее время всплытия и глубина следующей необходимой декомпрессионной остановки.
- Если интеграция газа является единственным способом контролировать оставшуюся подачу газа, оставшееся давление газа.
- Легкость чтения и доступность основного экрана. Неправильная интерпретация отображаемых данных может быть очень опасной. Это может произойти по разным причинам, включая отсутствие идентифицирующей информации и плохую читаемость. Также важна простота возврата на основной экран из альтернативных вариантов отображения. Если дайвер не может вспомнить, как вернуться к экрану, на котором отображается важная для безопасности информация, его безопасность может оказаться под серьезной угрозой. Дайверы могут не до конца понять и запомнить инструкции по эксплуатации, поскольку они, как правило, сложны. В условиях стресса сложные процедуры чаще забываются или применяются неправильно. Альтернативные экраны могут автоматически вернуться к основному экрану через время, достаточное для чтения вспомогательной информации. В качестве компромиссного решения критическая информация может отображаться на всех стабильных экранах во время погружения. Предпочтительно, чтобы данные были видны по умолчанию и не требовали освещения с помощью фонаря для погружения или внутреннего освещения, для включения которого требуется нажатие кнопки. Некоторые производители предлагают аналогичные функции в дополнительных компактных и больших форматах экрана. [91] [21]
- Простота использования и понимание руководства пользователя.
- Легкость чтения и ясность смысла предупреждений. Они могут обеспечиваться простыми символьными дисплеями, звуковыми сигналами, мигающими дисплеями, текстовыми сообщениями, цветовым кодированием или их комбинацией. Сигналы тревоги должны четко указывать на проблему, чтобы дайверу не приходилось тратить время на то, чтобы выяснить, в чем проблема, и он мог немедленно принять меры для устранения проблемы.
- Проекционные дисплеи могут использоваться для предоставления дайверу важной информации, которая всегда видна. Их можно закрепить на маске или на мундштуке. Проекционные дисплеи требуют специальной оптики, расположенной вблизи глаз, чтобы обеспечить правильную фокусировку на дисплее. [44] [92] [93] В условиях очень плохой видимости проекционный дисплей имеет то преимущество, что мутность не влияет на способность дайвера видеть дисплей. Это также позволяет дайверу отслеживать все отображаемые данные о погружении, не прерывая свою работу. [94]
- Для более технических применений - простота переключения газов как на заранее заданные газовые смеси, которые несет дайвер, так и на непредустановленные смеси, которые может подавать другой дайвер.
- Простота доступа к альтернативным данным экрана, большая часть которых не имеет прямого значения для безопасности, но может повлиять на успех погружения другими способами, например, использованием функций компаса.
- Разборчивость дисплея при различных внешних условиях видимости и освещенности, а также при различной остроте зрения дайвера, что может включать запотевание маски или даже потерю маски.
Форм-фактор [ править ]
Существует четыре наиболее часто используемых форм-фактора :
- Корпус наручных часов компактен, легок и может использоваться в качестве наручных часов для повседневного использования . Компьютеры для фридайвинга обычно имеют этот формат, но он также популярен и для подводного плавания. [12]
- Круглые корпуса (шайба) подходят к большинству консолей инструментов для дайвинга и имеют дополнительные крепления на запястье. Форма и размер определялись обычными размерами аналоговых механических водолазных инструментов (глубиномеров и манометров), которые обычно крепятся на консоли.
- Прямоугольные корпуса (кирпичные) предназначены для крепления на запястье, при этом используется экран большего размера для более удобного чтения изображений или большего количества информации на экране. Они часто имеют изогнутую заднюю поверхность для устойчивости и два ремня для безопасности. Существуют также корпуса асимметричного дизайна со схожими характеристиками и особенностями. Пожалуй, это самый популярный формат технического дайвинга.
- Размеры корпусов смартфонов рассчитаны на широкий диапазон моделей телефонов, поэтому они обязательно больше. Площадь дисплея по своей сути большая, а качество отображения зависит от используемого смартфона. Их можно закреплять на запястье или носить в руке с помощью страховочного ремешка, особенно если они также используются в качестве камер. [13]
производства Стандарты производительности и
Стандарты, действующие в Европейском Союзе: [83]
- Если дайв-компьютер интегрирован с манометром в баллоне, он должен быть сертифицирован в соответствии со стандартом EN250 (дыхательное оборудование), а Директива о средствах индивидуальной защиты становится обязательной.
- Директива по ЭМС (89/336/EEC) для электроприборов требует, чтобы они не вызывали электрических помех и не были к ним чувствительны.
- EN13319:2000: охватывает оборудование для измерения глубины и времени, но явно исключает мониторинг обязательности декомпрессии.
- Директива о СИЗ 89/686/EEC призвана гармонизировать продукцию для обеспечения высокого уровня защиты и безопасности, но компьютеры для дайвинга не указаны в директиве в разделе 3.11 — дополнительные требования, специфичные для конкретных рисков — защитные устройства для снаряжения для дайвинга. Некоторые другие классы водолазного снаряжения, такие как респираторное оборудование (EN250:2002), компенсаторы плавучести (EN1809:1999), комбинированные плавучие и спасательные устройства (EN12628:2001), дыхательное оборудование для сжатого найтрокса и кислорода (EN13949:2004), ребризеры ( EN14143:2004), а сухие костюмы (EN14225-2:2005) подпадают под действие директивы СИЗ.)
- Общий стандарт обеспечения качества ISO9001.
Этот раздел нуждается в дополнении : стандартами, применимыми в других местах. Вы можете помочь, добавив к нему . ( май 2021 г. ) |
водолазных операциях по использованию в коммерческих соображения Эксплуатационные
Принятие подводных компьютеров для использования в коммерческом дайвинге варьируется в зависимости от страны и промышленного сектора. Критерии валидации были основным препятствием для принятия водолазных компьютеров для коммерческого дайвинга. Миллионы рекреационных и научных погружений ежегодно проходят успешно и без происшествий, но использование дайв-компьютеров по-прежнему запрещено для коммерческих водолазных операций в нескольких юрисдикциях, поскольку безопасность используемых алгоритмов не может быть гарантирована, а законодательные органы, которые могут разрешить их использование, имеют обязанность заботиться о работниках. Производители не хотят вкладывать средства в дорогостоящий и утомительный процесс официальной проверки, а регулирующие органы не будут принимать компьютеры для дайвинга до тех пор, пока процесс проверки не будет задокументирован. [83]
Верификация — это определение того, что дайв-компьютер работает правильно, то есть правильно выполняет запрограммированный алгоритм, а валидация подтверждает, что алгоритм обеспечивает принятый уровень риска. [83]
Если алгоритм декомпрессии, используемый в серии подводных компьютеров, считается приемлемымдля коммерческих водолазных работ, с дополнительными инструкциями по использованию или без них, существуютвопросы эксплуатации, которые необходимо учитывать: [7]
- Компьютер должен быть простым в использовании, иначе он, вероятно, не будет принят.
- Для эффективного использования дисплей должен быть легко читаем в условиях плохой видимости.
- Дисплей должен быть четким и легко понятным, даже если дайвер находится под воздействием азотного наркоза, чтобы снизить риск путаницы и принятия неверных решений.
- Алгоритм декомпрессии должен быть настроен на более консервативные настройки, поскольку некоторым дайверам может потребоваться более консервативный профиль.
- Компьютер для погружений должен быть легко загружаемым для сбора данных профиля, чтобы можно было проводить анализ погружений.
управления и мониторинга ребризера Аппаратное обеспечение
Функциональные требования к ребризеру с замкнутым контуром с электронным управлением очень похожи на функции и возможности технических водолазных декомпрессионных компьютеров для погружений с ребризером, и некоторые производители ребризеров используют аппаратное обеспечение дайв-компьютеров, переупакованное производителями дайв-компьютеров, в качестве блоков управления и мониторинга ребризера. Программное обеспечение может быть модифицировано для отображения показаний нескольких кислородных датчиков, предупреждений, сигналов тревоги и логики голосования, а оборудование подводного компьютера может быть жестко подключено к аппаратному обеспечению управления ребризером.
Нижний таймер [ править ]

Донный таймер или таймер погружения — это электронное устройство, которое записывает глубину через определенные промежутки времени во время погружения и отображает текущую глубину, максимальную глубину, прошедшее время, а также может отображать температуру воды и среднюю глубину. Он вообще не рассчитывает данные о декомпрессии и эквивалентен режиму манометра на многих подводных компьютерах.
Обучение и сертификация [ править ]
Подход к обучению использованию подводного компьютера со временем изменился. Первоначально подводный компьютер считался специальным оборудованием, и пользователь нес ответственность за то, чтобы он умел правильно его использовать. Рекомендации AAUS от Семинара по дайв-компьютерам 1989 года предусматривали сдачу письменного экзамена, прежде чем научным дайверам будет разрешено использовать персональные дайв-компьютеры в полевых условиях. [1] По мере того, как они стали более распространенными и обычным способом наблюдения за погружением, минимальные инструкции по использованию компьютера стали интегрированы в обучение дайвингу как часть подготовки для получения определенного сертификата. Это осложняется вероятностью использования более чем одной модели учащимися на данном курсе, за исключением случаев, когда школа предоставила компьютеры. можно С конца 2009 года на курсах PADI Open Water Diver пройти раздел с компьютером для дайвинга вместо обучения использованию таблиц для дайвинга. В комплект поставки входит буклет о том, как использовать и выбирать подводный компьютер. [95] SDI была одной из первых, кто начал использовать дайв-компьютеры при обучении с начального уровня, и предлагает курс под названием SDI Computer Diver, предназначенный для дайверов, сертифицированных агентствами, которые использовали традиционные таблицы для дайвинга для планирования во время обучения и не прошли формального обучения использованию подводных компьютеров. [96]
В 2024 году Scuba Schools International (SSI) объявила о программе обучения под названием «Computer Diver», которая охватывает базовые функции, настройку и эксплуатацию подводных компьютеров. [97] Обучение считается подходящим для детей в возрасте от 10 лет и старше, на максимальной глубине 30 м, и ожидается, что оно займет от 3 до 6 часов. [98] Аналогичным образом школы PADI предлагают курс под названием «Специалист по компьютерному дайвингу». [99] который имеет обязательную сертификацию PADI Open Water Diver, сертификат минимального уровня для автономного рекреационного дайвинга. Курс включает до трех занятий в классе и дополнительное погружение в открытой воде. [100]
У каждого производителя и во многих случаях между моделями, доступными от каждого производителя, существуют большие различия в деталях работы, поэтому между моделями переносится только основная информация и принципы, а для использования нового компьютера требуется значительное переобучение. безопасно. Эту ситуацию можно было бы улучшить с помощью международно признанного стандарта пользовательских интерфейсов для критически важных функций. Информация, необходимая для безопасной эксплуатации большинства подводных компьютеров, обычно извлекается пользователем из руководства пользователя, а во многих случаях из видеороликов, свободно доступных в Интернете. В большинстве таких ситуаций оценка компетентности отсутствует, и пользователь методом проб и ошибок во время погружения выясняет, что он не понял или не запомнил.
Производители [ править ]
Этот раздел нуждается в дополнительных цитатах для проверки . ( март 2019 г. ) |
- Аква Лунг/Спиротехника [101] рынки под брендами Aqualung, Apeks, Oceanic, Aeris и бывшими брендами US Divers, SeaQuest, Technisub, а также владеет Pelagic Pressure Systems
- Бенемец Ой , [76] продается APValves (Buddy) [ нужна ссылка ] и Марес [76]
- Гражданин Дозор [102]
- Cochran Undersea Technology (Cochran) была поставщиком подводных компьютеров для ВМС США. Они были запрограммированы с использованием специального алгоритма ВМС США, основанного на алгоритме Тельмана . [65] Кокран закрылся после смерти основателя, и с тех пор ВМС США используют компьютеры Shearwater Research, запрограммированные на модель декомпрессии, указанную ВМФ.
- Дипблю [103]
- Технология Дельта П (VR2) [104]
- Дайвсофт (Свобода) [105]
- Гармин [106]
- HeinrichsWeikamp ( с открытым исходным кодом ) [107]
- HTM Sports : Дакор [ нужна ссылка ] и Марес [ нужна ссылка ]
- Гидрокосмическая инженерия (ВШЭ) [17]
- Ликвивидение [108]
- Океаны [109] (Оушен S1 Сверхзвуковой)
- Pelagic Pressure Systems , приобретенная Aqua Lung в мае 2015 г., [110]
- Соотношение компьютеров [111]
- Скубапро-UWATEC [112] [55] принадлежит Джонсон Аутдорс [113]
- Сейко , [25] также продается:
- кресс , [ нужна ссылка ] Обряд погружения , [ нужна ссылка ] Скубапро , [ нужна ссылка ] О , [ нужна ссылка ] Зигл [ нужна ссылка ]
- Исследования Шируотера (Шируотер) [114]
- Шервуд Скуба [115]
- Суунто [116]
- Компьютеры для технических погружений [15]
- Уемис [ нужна ссылка ]
- Центр подводных технологий [117]
- Технология виртуальной реальности (VR3) [118]
Значение [ править ]
наряду с буями-маркерами с задержкой на поверхности , были признаны крайне важным оборудованием безопасности. По данным опроса европейских дайверов-любителей и поставщиков услуг по дайвингу, проведенного в 2018 году, дайв-компьютеры, [3] [119]
См. также [ править ]
- Алгоритм декомпрессии Бюльмана - Математическая модель поглощения и выделения тканями инертного газа при изменении давления.
- Декомпрессия (ныряние) - Снижение давления и его последствия при подъеме с глубины.
- Декомпрессионное оборудование - оборудование, используемое дайверами для облегчения декомпрессии.
- Практика декомпрессии - методы и процедуры безопасной декомпрессии дайверов.
- Теория декомпрессии - Теоретическое моделирование физиологии декомпрессии.
- Глубиномер - прибор, указывающий глубину ниже базовой поверхности.
- Человеческий фактор при проектировании снаряжения для дайвинга . Влияние взаимодействия между пользователем и оборудованием на конструкцию.
- Метр морской воды – единица давления, равная одной десятой бара.
- Модель пузырька с уменьшенным градиентом — алгоритм декомпрессии
- Алгоритм Тельмана - Математическая модель декомпрессии дайвера
- Модель переменной проницаемости - модель и алгоритм декомпрессии, основанные на физике пузырьков.
Ссылки [ править ]
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л Ланг, Массачусетс; Гамильтон, Р.В. младший (1989). Труды семинара по подводным компьютерам AAUS . США: Центр морских наук Университета Южной Калифорнии в Каталине. п. 231.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л м н Аззопарди, Э.; Сэйер, MDJ (2010). «Обзор технических характеристик 47 моделей водолазного декомпрессионного компьютера» . Международный журнал Общества подводных технологий . 29 (2). Общество подводных технологий: 63–70. дои : 10.3723/ут.29.063 . Архивировано из оригинала 29 сентября 2022 г. Проверено 22 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б Лукрези, Серена; Эги, Салих Мурат; Пьери, Массимо; Бурман, Франсуа; Озиигит, Укротитель; Чиалони, Данило; Томас, Гай; Маррони, Алессандро; Саайман, Мелвилл (23 марта 2018 г.). «Приоритеты безопасности и недооценки при рекреационном подводном плавании с аквалангом: европейское исследование, поддерживающее внедрение новых программ управления рисками» . Границы в психологии . 9 (383): 383. doi : 10.3389/fpsyg.2018.00383 . ПМЦ 5876297 . ПМИД 29628904 .
- ^ Карузо, Джеймс Л. (2006). «Подход патологоанатома к случаям смерти при дайвинге». Телеконференция Американского общества клинической патологии .
- ^ Конкэннон, Дэвид (2007). «Судебные разбирательства по дайвингу в эпоху электронных технологий: важность сохранения данных дайв-компьютера в случае несчастного случая» . Бизнес дайв-центра . 10 (6). Архивировано из оригинала 23 марта 2018 года . Проверено 14 января 2011 г.
- ^ «Многоуровневое и компьютерное дайвинг». Приключения в дайвинге (PDF) . ПАДИ. 1991. стр. 165–184. ISBN 9781878663092 . Архивировано (PDF) из оригинала 22 апреля 2024 г. Проверено 22 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л Блогг, СЛ; Ланг, Массачусетс; Мёллерлоккен А., ред. (2012). Материалы семинара по валидации подводных компьютеров. Симпозиум Европейского подводного и баромедицинского общества, 24 августа 2011 г. Гданьск. Тронхейм: Норвежский университет науки и технологий (отчет).
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж Маунт, Том; Саватский, Дэвид; Дулетт, Дэвид Дж.; Сомерс, Ли (2011). «1: Планирование погружения». Tek Lite: Полное руководство по усовершенствованному обогащенному воздуху найтроксу и тримиксу для отдыха . Майами, Флорида: IANTD. п. 10. ISBN 978-0-915539-07-9 .
- ^ «Как измерить абсолютное давление с помощью пьезорезистивных чувствительных элементов» (PDF) . www.amsys.info . Архивировано (PDF) из оригинала 9 декабря 2019 года . Проверено 9 декабря 2019 г.
- ^ «MS5803-07BA Высотомер и датчик давления погружения» . www.te.com . Проверено 10 декабря 2019 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л м н тот п д «Инструкция по эксплуатации Perdix AI» (PDF) . Шируотер. Архивировано (PDF) из оригинала 10 октября 2019 г. Проверено 10 октября 2019 г.
- ↑ Перейти обратно: Перейти обратно: а б с «Выбор подводного компьютера: наручные часы и крепление на запястье, в чем разница?» . www.scubadivermag.com . 6 ноября 2019 года. Архивировано из оригинала 28 ноября 2023 года . Проверено 18 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д «Дайвфон» . www.innovasub.com . 16 октября 2021 года. Архивировано из оригинала 23 сентября 2023 года . Проверено 18 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б Райт, Серена; Халл, Том; Сивьер, Дэвид Б.; Пирс, Дэвид; Пиннегар, Джон К.; Сэйер, Мартин DJ; Могг, Эндрю О.М.; Аззопарди, Элейн; Гонтарек, Стив; Хайдер, Киран (2016). «Дайверы с аквалангом как океанографические пробоотборники: потенциал подводных компьютеров для улучшения мониторинга температуры воды» . Научный представитель . 6 : 30164. Бибкод : 2016NatSR...630164W . дои : 10.1038/srep30164 . ПМЦ 4957074 . ПМИД 27445104 . Архивировано из оригинала 22 апреля 2024 г. Проверено 22 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и «Технические подводные компьютеры ТДЦ-3» . www.tdc-3.com . Архивировано из оригинала 26 января 2019 года . Проверено 25 января 2019 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л м н тот п д р с т в v В х и С аа аб и объявление но из Руководство пользователя компьютеров Ratio iX3M, версия 4.02 (PDF) . Ливорно, Италия: Ratio Computers. Архивировано (PDF) из оригинала 7 сентября 2018 г. Проверено 7 сентября 2018 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час «Руководство пользователя подводного компьютера HS Explorer» . hs-eng.com . Сент-Огастин, Флорида: HydroSpace Engineering, Inc., 2003. Архивировано из оригинала 4 марта 2016 года . Проверено 11 сентября 2017 г.
- ↑ Перейти обратно: Перейти обратно: а б с «Продукция: Сапсан» . www.shearwater.com . Архивировано из оригинала 14 мая 2021 года . Проверено 21 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж «Руководство пользователя Shearwater Predator, версия 2.3.3» (PDF) . www.shearwaterresearch.com . Архивировано (PDF) из оригинала 14 сентября 2021 года . Проверено 14 августа 2020 г.
- ↑ Перейти обратно: Перейти обратно: а б Гамильтон, Р.В. младший, изд. (1995). Эффективность подводных компьютеров при повторных погружениях. 44-й семинар Общества подводной и гипербарической медицины. Публикация UHMS № 81(DC)6-1-94. (Отчет). Общество подводной и гипербарической медицины . п. 71.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л м н тот п д р с т в v В х и С аа аб и объявление но из в ах есть также и Исследования Шируотера (15 января 2020 г.). Руководство по эксплуатации Perdix (PDF) . ДОК. 13007-SI-Ред.Д (15 января 2020 г.). Архивировано (PDF) из оригинала 16 июля 2020 года . Проверено 16 июля 2020 г.
- ↑ Перейти обратно: Перейти обратно: а б с Озиигит, Укротитель; Эги, Салих (2012). «Оценка эргономических характеристик подводных компьютеров» . 2012 Вторая международная конференция по цифровым информационным и коммуникационным технологиям и их [так в оригинале] приложениям (DICTAP) . 2-я Международная конференция по цифровым информационно-коммуникационным технологиям и их приложениям, DICTAP 2012. стр. 314–318. дои : 10.1109/DICTAP.2012.6215418 . ISBN 978-1-4673-0734-5 . Архивировано из оригинала 14 марта 2024 г. Проверено 1 декабря 2019 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж «Алгоритмы подводного компьютера для чайников» . www.dipndive.com . Июнь 2021 г. Архивировано из оригинала 2 июня 2021 г. Проверено 2 июня 2021 г.
- ^ Поллок, Нил В. (сентябрь 2015 г.). «Re: Не ныряйте в холодную воду, когда в этом нет необходимости» . Дайвинг Гиперб Мед . 45 (3): 209. PMID 26415074 . Архивировано из оригинала 06 октября 2021 г. Проверено 11 октября 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б «Руководство по эксплуатации Seiko DH33» . Сейко. Архивировано из оригинала 27 мая 2021 года . Проверено 27 мая 2021 г. - через www.manualslib.com.
- ↑ Перейти обратно: Перейти обратно: а б Винке, Брюс Р.; О'Лири, Тимоти Р. «Модель пузырьков с уменьшенным градиентом с базисом и сравнениями» (PDF) . www.scuba-doc.com . Архивировано (PDF) из оригинала 10 июня 2016 года . Проверено 22 января 2017 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и «Алгоритмы подводного компьютера для чайников» . Погружение и погружение . 4 апреля 2019 года . Проверено 21 ноября 2019 г. [ мертвая ссылка ]
- ^ «Обновление исследований буревестников до алгоритма декомпрессии VPM-B» . www.scubadoctor.com.au . Архивировано из оригинала 3 июня 2021 года . Проверено 3 июня 2021 г.
- ^ «Ж-Л16С, ВПМ-Б, ДКАП, ДЦИЭМ, ВВАЛ-18М… Неужели это имеет значение?» . сайт divgearexpress.com . Август 2021 г. Архивировано из оригинала 1 августа 2021 г. Проверено 1 августа 2021 г.
- ^ «Алгоритмы погружения Suunto RGBM» . Архивировано из оригинала 14 сентября 2021 г. Проверено 14 сентября 2021 г.
- ^ «Руководство пользователя Suunto EON Steel Black 2.5: Алгоритмы декомпрессии» . Архивировано из оригинала 18 сентября 2021 г. Проверено 18 сентября 2021 г.
- ^ Дулетт, Дэвид (20–22 апреля 2023 г.). Достижения в теории и практике декомпрессии . Форум ребризеров 4. Валетта, Мальта. Архивировано из оригинала 16 апреля 2024 года . Проверено 16 апреля 2024 г. - через gue.tv.
- ^ Блёмеке, Тим (3 апреля 2024 г.). «Увеличьте риск DCS с помощью алгоритма Тельмана» . Глубоко . Архивировано из оригинала 16 апреля 2024 года . Проверено 16 апреля 2024 г.
- ^ «Подробный обзор Suunto Zoop» . Случайности и приключения . 2016 . Проверено 7 августа 2016 г. [ постоянная мертвая ссылка ]
- ↑ Перейти обратно: Перейти обратно: а б с д и ж «Эволюция планирования погружений» . Shearwater.com . 11 августа 2020 года. Архивировано из оригинала 24 апреля 2024 года . Проверено 9 мая 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж «Руководство пользователя iX3M: iX3M Easy, iX3M Deep, iX3M Tech+, iX3M Reb» (PDF) . Ливорно, Италия: Ratio Computers. Архивировано (PDF) из оригинала 10 октября 2019 г. Проверено 10 октября 2019 г.
- ^ Хаггинс, К.Э. (2006). «Оценка вариантов подводного компьютера для потенциального использования в научных погружениях с надводным питанием 300 FSW Heliox / Trimix». Ин Ланг, Массачусетс; Смит, штат Нью-Йорк (ред.). Материалы семинара по продвинутому научному дайвингу . Смитсоновский институт, Вашингтон, округ Колумбия.
- ^ Эссекс, Рони (27 марта 2023 г.). «Как компьютер для фридайвинга может повысить вашу безопасность и производительность во время подводной охоты?» . alchemy.gr/ . Архивировано из оригинала 17 апреля 2024 года . Проверено 17 апреля 2024 г.
- ^ Зварич, Кристина (14 августа 2019 г.). «Почему дайв-компьютеры необходимы фридайверам» . Архивировано из оригинала 17 апреля 2024 года . Проверено 17 апреля 2024 г.
- ^ Зварич, Кристина (1 июля 2020 г.). «10 функций, на которые следует обратить внимание в компьютере для фридайвинга» . Архивировано из оригинала 17 апреля 2024 года . Проверено 17 апреля 2024 г.
- ^ Кнудсен, Сорен. «Подводный компьютер Shearwater Perdix» . www.divein.com . Архивировано из оригинала 21 мая 2021 года . Проверено 21 мая 2021 г.
- ^ «Беспроводной датчик давления в баллонах Suunto» . Аксессуары и запасные части . Суунто. Архивировано из оригинала 28 ноября 2016 года . Проверено 27 ноября 2016 г.
- ↑ Перейти обратно: Перейти обратно: а б «Сравнение Perdix и Petrel 2» (PDF) . www.shearwater.com . Исследования Шируотера. 24 декабря 2015 г. Архивировано (PDF) из оригинала 21 мая 2021 г. . Проверено 21 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б Исследования Шируотера (2 апреля 2020 г.). Shearwater NERD2 — Руководство пользователя (PDF) . DOC 12501 MAN-REV-G. Архивировано (PDF) из оригинала 24 августа 2021 года . Проверено 27 мая 2021 г.
- ^ «Ваш подводный компьютер: советы и рекомендации – ЧАСТЬ 1» . www.dansa.org . 25 мая 2019 года. Архивировано из оригинала 12 августа 2022 года . Проверено 14 марта 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к Севеке, Лотар (1988). «Разработка водолазного компьютера (только технология, а не алгоритмы)» . diving.seveke.de (на немецком языке). Архивировано из оригинала 2 апреля 2015 года . Проверено 16 сентября 2011 г.
- ^ Уилан, Стефан (29 января 2019 г.). «Заявление производителя после инцидента в Boot Dusseldorf» . www.deeperblue.com . Архивировано из оригинала 2 июня 2021 года . Проверено 2 июня 2021 г.
- ^ «Уведомление об отзыве: компьютеры для дайвинга» . iscubacenter.com . Архивировано из оригинала 14 сентября 2023 года . Проверено 17 апреля 2024 г.
- ^ «CPSC и UWATEC AG объявляют об отзыве подводных компьютеров Aladin Air X NitrOx 1995 года» . www.cpsc.gov . 5 февраля 2003 г. Архивировано из оригинала 19 февраля 2023 г. Проверено 17 апреля 2024 г.
- ^ «CPSC, глава USA Inc. объявляет об отзыве компьютеров для подводного плавания с аквалангом» . www.cpsc.gov . 22 февраля 2005 г. Архивировано из оригинала 2 декабря 2023 г. . Проверено 17 апреля 2024 г.
- ^ «Oceanic отзывает цифровой подводный компьютер из-за опасности декомпрессии» . www.cpsc.gov . 22 июня 2006 г. Архивировано из оригинала 30 сентября 2023 г. . Проверено 17 апреля 2024 г.
- ^ «Компьютеры для дайвинга Suunto отозваны из-за опасности декомпрессии» . www.cpsc.gov . 19 июля 2006 г. Архивировано из оригинала 2 декабря 2023 г. Проверено 17 апреля 2024 г.
- ^ Этцель, Клифф (26 мая 2003 г.). «Согласно иску, корпоративное сокрытие подвергло дайверов серьезному риску» . Архивировано из оригинала 8 декабря 2023 года . Проверено 17 апреля 2024 г.
- ^ «Отзыв о компьютерах Aladin Air X Nitrox» . Подводное течение . Апрель 2003 г. Архивировано из оригинала 1 декабря 2023 г. Проверено 17 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с Нойманн, Питер Г. (19 февраля 2003 г.). «Отзыв компьютера для подводного плавания» . Форум по рискам для населения в компьютерах и связанных с ними системах 22.57 . 22 (57). Ассоциация вычислительной техники. Архивировано из оригинала 19 марта 2012 года . Проверено 1 сентября 2011 г.
- ^ Хиллсман, Джон Р. (5 февраля 2003 г.). Роберт Раймо, истец, против Uwatec, Inc., Undersea Indistries, Inc. и Johnson Outdoors, Inc., ответчики, Окружной суд США, Северный округ Калифорнии. Дело 4:03-cv-00513-WDB Документ 1 (Судебное дело).
- ^ «Личностная травма» . Конкэннон и Чарльз, ПК . Архивировано из оригинала 2 октября 2023 года . Проверено 17 апреля 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с Бересфорд, М.; Саутвуд, П. (2006). Руководство CMAS-ISA Normoxic Trimix (4-е изд.). Претория, Южная Африка: Инструкторы CMAS в Южной Африке.
- ^ Макгоф, ЕК; Десотель, Д.А.; Галлахер, Ти Джей (1990). «Подводные компьютеры и декомпрессионная болезнь: обзор 83 случаев». Журнал гипербарической медицины . 5 (3): 159–162.
- ^ Макгоф, ЕК; Десотель, Д.А.; Галлахер, Ти Джей (1990). «Производительность подводных компьютеров во время одиночных и повторяющихся погружений: сравнение с таблицами водолазных работ ВМС США». Журнал гипербарической медицины . 5 (3): 163–170.
- ^ Стандарты научного дайвинга: Руководство . Мобил, Алабама: Американская академия подводных наук . 2019.
- ^ Поллок, Нил (30 ноября 2015 г.). «Гибкий контроль декомпрессионного стресса» . www.shearwater.com . Архивировано из оригинала 11 июня 2021 года . Проверено 11 июня 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б «Сводка предупреждений и сигналов тревоги». Руководство пользователя дайв-компьютера Apeks Quantum Nitrox . Блэкберн, Ланкашир, Англия: Морское оборудование Apeks. 2003. стр. 40–42.
- ^ Программное обеспечение для технического дайвинга для Galilio: Руководство пользователя (PDF) . Аквалангопро. Архивировано (PDF) из оригинала 13 апреля 2019 г. Проверено 18 сентября 2019 г.
- ↑ Перейти обратно: Перейти обратно: а б Ландер, Карлос Э. (2 мая 2021 г.). «Они помогли спровоцировать революцию в области подводных вычислений: RIP Cochran Undersea Technology (1986-2020)» . gue.com . Архивировано из оригинала 2 июня 2021 года . Проверено 29 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б с д Каттер, Мэрион. «История подводного компьютера» . www.divemagazine.co.uk . Архивировано из оригинала 2 ноября 2013 года.
- ^ Сирл, ВФ-младший (1957). «Декомпьютер Foxboro Mark I». Технический отчет экспериментального водолазного подразделения ВМС США . НЕДУ-7-57.
- ^ Дэвис, М. (2006). «Комментарий редактора к статье «Автоматические измерители декомпрессии»: Измеритель декомпрессии SOS». Дайвинг и гипербарическая медицина . 36 (1).
- ^ Стаббс, РА; Кидд, диджей (1965). Пневматический аналоговый декомпрессионный компьютер. Отчет Канадского института авиационной медицины (Отчет). Том. 65-РД-1.
- ^ Стаббс, РА; Кидд, диджей (1965). Управление декомпрессией с помощью аналогового компьютера. Отчет Канадского института авиационной медицины (Отчет). Том. 65-РД-8.
- ^ Хиллз, бакалавр (сентябрь 1967 г.). «Пневматический аналог для прогнозирования возникновения декомпрессионной болезни». Медицинская и биологическая инженерия . 5 (5): 421–432. дои : 10.1007/BF02479136 . ПМИД 6056356 . S2CID 2479104 .
- ↑ Перейти обратно: Перейти обратно: а б Хаггинс, Карл Э. (1988). Ланг, Массачусетс (ред.). «Компьютеры подводной декомпрессии: актуальное или идеальное». Достижения подводной науки...88. Труды восьмого ежегодного научного симпозиума по дайвингу Американской академии подводных наук . Американская академия подводных наук.
- ↑ Перейти обратно: Перейти обратно: а б с д «История подводного компьютера – от аналогового к цифровому» . www.deepbluediving.org . Ноябрь 2016 г. Архивировано из оригинала 2 июня 2021 г. Проверено 29 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б Хейнмиллер, Пенсильвания (1989). Ланг, Массачусетс; Яап, У.К. (ред.). «Новые компьютеры Delphi от ORCA: влияние на дайверское сообщество». Погружение в науку… 1989. Материалы ежегодного научного симпозиума по дайвингу Американской академии подводных наук, 28 сентября – 1 октября 1989 г. Океанографический институт Вуд-Хоул, Вудс-Хоул, Массачусетс, США . Американская академия подводных наук .
- ^ Руководство по подводному компьютеру Dacor Micro-brain Pro Plus (PDF) . Корпорация Дакор. Май 1989 г. Архивировано (PDF) из оригинала 2 июня 2021 г. Проверено 1 июня 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б с Райвио, Эса (1996). «Говорящий компьютер отвечает» (PDF) . Подводное течение . Elephant Socks Publishing, Inc., стр. 9, 10. Архивировано (PDF) из оригинала 14 сентября 2021 года . Проверено 1 июня 2021 г.
- ^ Батлер, Фрэнк К.; Саутерленд, Дэвид (2001). «Декомпрессионный компьютер ВМС США». Подводная и гипербарическая медицина . 28 (4): 213–28. ПМИД 12153150 .
- ^ Батлер, Фрэнк К. (2001). «Декомпрессионный компьютер ВМС США» . Подводная и гипербарическая медицина . 28 (4): 213–228. ПМИД 12153150 . Архивировано из оригинала 7 июля 2006 г. Проверено 8 февраля 2011 г.
- ^ «UDI – Подводный цифровой интерфейс» . www.utc-digital.com . Корпорация ЮТК. 2008. Архивировано из оригинала 22 октября 2007 года . Проверено 14 сентября 2009 г.
- ^ «Обзор: корпус для дайвинга Oceanic+ для iPhone» . swimpruf.substack.com . 30 августа 2023 года. Архивировано из оригинала 18 апреля 2024 года . Проверено 18 апреля 2024 г.
- ^ Демолдер, Дэмиен (22 ноября 2019 г.). «Корпус Diveroid превращает ваш смартфон в подводный компьютер и подводную камеру» . www.dpreview.com . Архивировано из оригинала 23 марта 2023 года . Проверено 18 апреля 2024 г.
- ^ Озиигит, Укротитель; Сатир, Сесил; Эги, Салих; Мемишоглу, Мирач (2019). «Разработка модуля беспроводного датчика давления для преобразования мобильных телефонов в компьютеры для дайвинга» . Журнал техники, науки и технологий Сельчукского университета . 7 (2): 494–508. дои : 10.15317/Scitech.2019.214 . Архивировано из оригинала 15 мая 2024 г. Проверено 8 мая 2024 г.
- ↑ Перейти обратно: Перейти обратно: а б с д Блогг, СЛ; Ланг, Массачусетс; Мёллерлоккен, А. (24–29 сентября 2012 г.). «Валидация подводных компьютеров» . В Лобеле — Лиза Керр; Продавец, Диана Л. (ред.). Дайвинг ради науки, 2012 г., Труды 31-го научного симпозиума Американской академии подводных ученых . Монтерей, Калифорния: Американская академия подводных наук. стр. 62–81. ISBN 978-0-9800423-6-8 . Архивировано из оригинала 14 марта 2024 года . Проверено 22 мая 2021 г.
- ↑ Перейти обратно: Перейти обратно: а б Хаггинс, Карл Э. (2004). «Производительность подводных компьютеров, подвергающихся воздействию профилей с известными результатами для людей. (аннотация)». Подводная и гипербарическая медицина . 31 .
- ^ Гамильтон, Роберт В .; Роджерс, RE; Пауэлл, Майкл Р.; Ванн, Ричард Д. (1994). Разработка и проверка процедур безостановочной декомпрессии для любительского дайвинга: Планировщик рекреационных погружений DSAT (Отчет). Ранчо Санта-Маргарита, Калифорния: Корпорация Diving Science and Technology Corp.
- ↑ Перейти обратно: Перейти обратно: а б с д и Аззопарди, Э.; Сэйер, MDJ (2012). Стеллер, Д; Лобель, Л. (ред.). Не все созданы равными: функциональные возможности 49 моделей подводного компьютера . Дайвинг ради науки 2012. Труды 31-го симпозиума Американской академии подводных наук. Остров Дофин, Алабама: AAUS. Архивировано из оригинала 6 марта 2016 года . Проверено 17 сентября 2013 г.
- ^ Аззопарди, Элейн; Сэйер, Мартин (2012). «Оценка глубины и температуры в 47 моделях водолазного декомпрессионного компьютера» . Международный журнал Общества подводных технологий . 31 (1): 3–12. дои : 10.3723/ут.31.003 . Архивировано из оригинала 29 сентября 2022 г. Проверено 22 мая 2021 г.
- ^ Комитет PH/4/7 (15 июля 2000 г.). BS EN 13319:2000 Аксессуары для дайвинга. Глубиномеры и комбинированные устройства для измерения глубины и времени. Требования к функциональности и безопасности, методы испытаний (Технический отчет). Британский институт стандартов. ISBN 0 580 34324 3 .
{{cite tech report}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Марлоу, Селия; Хайдер, Киран; Сэйер, Мартин DJ; Кайзер, Январь (9 марта 2021 г.). «Дайверы как гражданские ученые: время отклика, точность и прецизионность измерения температуры воды с помощью подводных компьютеров» . Границы морской науки . 8 . дои : 10.3389/fmars.2021.617691 . S2CID 232144841 .
- ^ Психологический состав (18 марта 2010 г.). «Блок 2: Дисплеи». Эргономика . 1.0. Университет Лестера.
- ^ Таннхаузер, Рэйчел (25 мая 2021 г.). «Обзор Shearwater Teric (обновлено в 2021 г.)» . scubaotter.com . Архивировано из оригинала 26 мая 2021 года . Проверено 26 мая 2021 г.
- ^ «Скубапро Галилео ХУД» . thescubaprostore.co.za . Архивировано из оригинала 19 апреля 2024 года . Проверено 19 апреля 2024 г.
- ^ Эванс, Марк (12 мая 2020 г.). «Дополнительный текст: Марк Эванс рассматривает подводный компьютер Scubapro Galileo HUD» . www.scubadivermag.com . Архивировано из оригинала 19 апреля 2024 года . Проверено 19 апреля 2024 г.
- ^ Зибер, Арне; Куч, Бенджамин; Энокссон, Питер; Стоянова-Зибе, Милена (июль 2012 г.). «Разработка возможностей подводного компьютера с проекционным дисплеем для полнолицевых масок» . Подводные технологии . 30 (4): 195–199. дои : 10.3723/ут.30.195 . Архивировано из оригинала 13 мая 2024 г. Проверено 19 апреля 2024 г.
- ^ «Как использовать и выбирать компьютеры для дайвинга» . плюсы-blog.padi.com . 28 июля 2009 г. Архивировано из оригинала 14 марта 2024 г. Проверено 14 марта 2024 г.
- ^ «Компьютерный дайвер SDI» . www.tdisdi.com/ . 3 февраля 2016 г. Архивировано из оригинала 23 сентября 2023 г. Проверено 14 марта 2024 г.
- ^ Хелми, Сэм (11 марта 2024 г.). «SSI запускает новую специальность по компьютерному дайвингу» . www.deeperblue.com . Архивировано из оригинала 12 марта 2024 года . Проверено 13 марта 2024 г.
- ^ «Компьютерный дайвинг» . www.divessi.com . Архивировано из оригинала 18 апреля 2024 года . Проверено 14 марта 2024 г.
- ^ В системе PADI сертификационный термин «специалист» является относительным термином, который указывает, что курс предоставляется как «специализация» в дополнение к базовым навыкам дайвинга и необходимым знаниям.
- ^ «Специалист по компьютерному дайвингу» . сайт divaai.com . Архивировано из оригинала 30 сентября 2023 года . Проверено 14 марта 2024 г.
- ^ «Наша история | | Официальное снаряжение для дайвинга Aqua Lung — Aqua Lung» . Архивировано из оригинала 8 сентября 2022 г. Проверено 8 сентября 2022 г.
- ^ «Вопросы и ответы» . www.citizenwatch-global.com . Архивировано из оригинала 27 мая 2021 года . Проверено 27 мая 2021 г.
- ^ «Простой в использовании компьютер для дайвинга COSMIQ⁺GEN 5» . deepblu.com . Архивировано из оригинала 3 июня 2021 года . Проверено 3 июня 2021 г.
- ^ «Руководство по эксплуатации подводного компьютера VR2, версия 3.0» (PDF) . Delta P Technology Ltd., 2004 г. Архивировано (PDF) из оригинала 2 июня 2021 г. . Проверено 29 мая 2021 г. - через www.espaceplongee.ch.
- ^ «Дайвинг-компьютеры Freedom tech» . www.divesoft.com . Архивировано из оригинала 15 июня 2021 года . Проверено 3 июня 2021 г.
- ^ "Спуск" . garmin.com . Архивировано из оригинала 13 сентября 2021 года . Проверено 13 сентября 2021 г.
- ^ "Дом" . www.heinrichsweikamp.com . Генрихс Вейкамп. Архивировано из оригинала 9 февраля 2017 года . Проверено 30 августа 2016 г.
- ^ Лян, Джон (6 января 2017 г.). «Liquivision прекратила производство компьютеров для дайвинга» . Глубокий синий . Архивировано из оригинала 2 июня 2021 года . Проверено 1 июня 2021 г.
- ^ «Океаны, подводное сообщество» . www.oceans.io . Архивировано из оригинала 06 декабря 2023 г. Проверено 12 сентября 2023 г.
- ^ «Обзор приборов» . www.aqualung.com . Архивировано из оригинала 2 июня 2021 года . Проверено 31 мая 2021 г.
- ^ «Подводные компьютеры Ratio» . Ratio-computers.comm . Архивировано из оригинала 17 июня 2021 года . Проверено 13 сентября 2021 г.
- ^ Холдинг, Рейнольдс (24 июня 2011 г.). «Корпоративное сокрытие подвергало дайверов серьезному риску / Компания держала в секрете дефекты компьютеров в течение 7 лет, согласно иску Окленда» . СФГейт . Архивировано из оригинала 8 июля 2011 года . Проверено 1 сентября 2011 г.
- ^ «О нас — SCUBAPRO-UWATEC» . Аквалангопро. 2010. Архивировано из оригинала 15 августа 2010 года . Проверено 3 января 2011 г.
- ^ Боуэн, Курт. «Шируотер ГФ». Журнал Advanced Diver . № 24.
- ^ «История» . Архивировано из оригинала 8 сентября 2022 г. Проверено 8 сентября 2022 г.
- ^ «Продукция для дайвинга» . www.suunto.com . Архивировано из оригинала 1 июня 2021 года . Проверено 27 мая 2021 г.
- ^ «Продукты» . www.utc.co.il. Архивировано из оригинала 3 июня 2021 года . Проверено 3 июня 2021 г.
- ^ «Руководство по эксплуатации подводного компьютера VR3, 2008 г., ред. 1» (PDF) . Delta P Technology Ltd., 2008 г. Архивировано (PDF) из оригинала 2 июня 2021 г. . Проверено 29 мая 2021 г. - через www.espaceplongee.ch.
- ^ Эгнер, Сара (1 ноября 2018 г.). «Риски и опасности при подводном плавании с аквалангом: восприятие и реальность» . Внимание дайвера . Архивировано из оригинала 3 сентября 2019 года . Проверено 2 сентября 2019 г.
Дальнейшее чтение [ править ]
- Блогг, СЛ; Ланг, Массачусетс; Мёллерлоккен А., ред. (2012). «Материалы семинара по валидации подводных компьютеров». Симпозиум Европейского подводного и баромедицинского общества, 24 августа 2011 г. Гданьск. Тронхейм: Норвежский университет науки и технологий .
- Аззопарди, Элейн; Сэйер, Мартин DJ (24–29 сентября 2012 г.). «Не все созданы равными: вариативность работы 49 моделей подводного компьютера» . В Лобеле — Лиза Керр; Продавец, Диана Л. (ред.). Дайвинг ради науки, 2012 г., Труды 31-го научного симпозиума Американской академии подводных ученых . Монтерей, Калифорния: Американская академия подводных наук. стр. 36–40. ISBN 978-0-9800423-6-8 . Проверено 22 мая 2021 г.
- Фредрих, Дуг (декабрь 2018 г.). «Валидация алгоритмов, используемых в коммерческих готовых компьютерах для дайвинга» . Дайвинг и гипербарическая медицина . 48 (4): 252–258. дои : 10.28920/dhm48.4.252-258 . ПМК 6355308 . ПМИД 30517958 .
Внешние ссылки [ править ]
![]() СМИ, связанные с дайв-компьютерами, на Викискладе?
СМИ, связанные с дайв-компьютерами, на Викискладе?