Подводные поиски
Подводные поиски — это процедуры поиска известного или предполагаемого целевого объекта или объектов в определенной зоне поиска под водой. Они могут проводиться под водой водолазами, обитаемыми подводными аппаратами , подводными аппаратами с дистанционным управлением или автономными подводными аппаратами , а также с поверхности другими агентами, включая надводные корабли, самолеты и трупных собак .
Метод поиска пытается обеспечить полный охват области поиска, и для этого обычно применяется шаблон поиска, который представляет собой систематическую процедуру покрытия области поиска. На это большое влияние оказывает ширина развертки или полосы обзора датчика, которая во многом зависит от метода обнаружения цели. Для водолазов в условиях нулевой видимости это расстояние, которое водолаз может ощутить руками при движении по схеме, а для буксируемых пингер-локаторов - более километра в каждую сторону. Когда видимость лучше, это зависит от расстояния, на котором цель можно увидеть по образцу или обнаружить гидролокатором, оптическими датчиками или аномалиями магнитного поля. Во всех случаях схема поиска должна полностью покрывать зону поиска без излишней избыточности или пропущенных участков. Перекрытие необходимо для компенсации неточностей и ошибок датчиков, а также может быть необходимо, чтобы избежать пробелов в некоторых шаблонах.
Поиски дайвера
[ редактировать ]Водолазные поиски — подводные поиски, проводимые водолазами . Существует ряд методов, которые обычно используются коммерческими, научными, общественными, военными и дайверами-любителями . Некоторые из них подходят для подводного плавания , а некоторые — для дайвинга с поверхности . Выбор метода поиска будет зависеть от логистических факторов, местности, протокола и навыков дайвера.
В качестве общего принципа метод поиска пытается обеспечить 100% охват области поиска. на это большое влияние оказывает ширина развертки. В условиях нулевой видимости это расстояние, которое водолаз может ощутить руками, продвигаясь по схеме. Когда видимость лучше, это зависит от расстояния, на котором цель видна с рисунка. Во всех случаях схема должна быть точной и полностью покрывать зону поиска без чрезмерной избыточности или пропущенных участков. Перекрытие необходимо для компенсации неточностей и может быть необходимо, чтобы избежать пробелов в некоторых шаблонах.
Схема поиска, контролируемая веревками и линиями
[ редактировать ]Круговой поиск
[ редактировать ]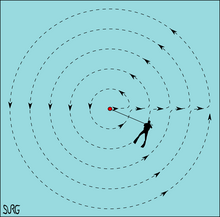
Подводный круговой поиск — это процедура, проводимая дайвером, перемещающимся вокруг фиксированной контрольной точки, обычно вплавь , на ряд расстояний (радиусов). Круговой поиск прост и требует небольшого оборудования. Это полезно там, где положение объектов поиска известно с достаточной точностью. [ 1 ] : 142
Процедура
[ редактировать ]Общая процедура состоит в том, чтобы начать с фиксированной центральной точки и искать окружность круга, радиус которого определяется линией поиска, закрепленной в центральной точке. Радиус круга зависит от видимости и увеличивается после завершения каждого круга на величину, которая позволяет дайверу увидеть или почувствовать перекрытие между текущей дугой и предыдущей дугой. [ 2 ] [ 3 ]
Один конец дистанционной линии несет дайвер, а другой прикрепляется к исходной точке любым подходящим способом. Например, прикрепляется к основанию линии выстрела, привязывается к дну, привязан к неподвижному объекту на дне или удерживается другим дайвером. Дайвер может буксировать буй-маркер на поверхности, чтобы показать свое местоположение команде поддержки, если позволяют условия. Дайвер разматывает участок дистанционной линии, соответствующий видимости, и отмечает стартовую позицию с помощью колышка, свободного маркера, направления по компасу или заранее проложенной маркерной линии, идущей наружу от исходной позиции. Затем, удерживая веревку натянутой, дайвер движется по кругу с радиусом лески, осуществляя поиск визуально или на ощупь, пока не возвращается в исходное положение. Затем дайвер разматывает еще один участок лески такой же длины и повторяет процедуру до тех пор, пока не найдет объект, не столкнется с препятствиями или не закончится леска, воздух или время. [ 1 ] : 142
Величина приращения линии расстояния для каждого прохода должна допускать некоторое перекрытие проходов, чтобы избежать риска пропуска цели между проходами. Если участвует напарник, наиболее эффективное место - рядом с контролирующим прыгуном на тросе, а удлинение троса для каждого взмаха может быть примерно вдвое увеличено. В зависимости от обстоятельств управление рисунком может осуществляться с поверхности, водолазом в центральной точке или дайвером на конце поисковой линии, который в этом случае будет управлять катушкой поисковой линии. [ 1 ] : 142
Вариации кругового поиска
[ редактировать ]В некоторых случаях второй дайвер может расположиться в фиксированной точке на дне и действовать как в качестве центральной точки, так и в качестве держателя троса. Водолаз и тендер на тросе общаются друг с другом с помощью сигналов натяжения троса. Когда дайвер совершил полный оборот поиска, тендер подает дайверу сигнал и продвигает еще один участок троса, чтобы поиск можно было расширить дальше от центральной точки. В другом варианте на линии поиска используется более одного дайвера. Водолазы располагаются на равномерном расстоянии в зависимости от видимости, а увеличение радиуса позволяет перекрывать зону поиска только самому дальнему водолазу на тросе. Этот вариант становится сложнее координировать с большим количеством дайверов, особенно в условиях плохой видимости. [ 1 ] : 142
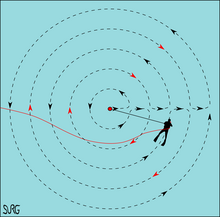
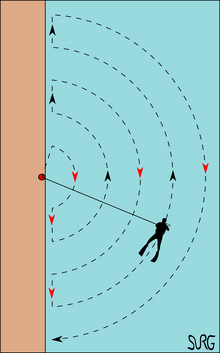
Основной разновидностью кругового поиска является маятниковый поиск , также известный как по дуге или поиск «рыбий хвост» . [ 2 ] [ 3 ] при котором дайвер останавливается и меняет направление в конце каждой дуги. Это используется, когда недостаточно места для совершения круга, например, при управлении с берега, когда зона поиска ограничена сектором с одной стороны от контрольной точки или существует серьезное препятствие, ограничивающее размер сектора, доступного для поиска. . Водолазы, находящиеся на поверхности, могут менять направление в конце каждой дуги даже при использовании полного угла поворота на 360°, чтобы избежать перекручивания шлангокабеля. Маятниковый поиск также можно проводить, если на поисковом тросе находится более одного дайвера, но это требует значительных навыков и координации, особенно в условиях плохой видимости. [ 4 ]
Другой вариант используется, когда цель достаточно велика, чтобы зацепить поисковую леску. В этом случае дайвер может выйти на весь радиус области поиска и сделать одиночный взмах, надеясь зацепить цель леской. Если по возвращении к линии старта или пеленгу он обнаружит, что находится ближе к центральной точке, он поплывет обратно вдоль линии в ожидании чего-нибудь зацепить. Если повезет, это станет целью поиска.
Если цель не найдена к моменту достижения шаблоном поиска максимального удобного радиуса, центральная точка может быть смещена и запущен новый поиск. Это можно повторять столько раз, сколько необходимо, но положения центральных точек необходимо выбирать так, чтобы можно было охватить всю зону поиска. Это подразумевает значительное перекрытие, и шаблон неэффективен. Самый эффективный шаблон использует равностороннюю треугольную сетку, но ее, возможно, придется изменить в соответствии с условиями сайта. [ 4 ]
Круговой поиск очень популярен, поскольку не требует сложной настройки и может выполняться большинством дайверов без особой специальной подготовки. Он эффективен там, где положение цели известно с достаточной точностью, где рельеф дна не имеет серьезных препятствий и где изменение глубины на каждом дуге приемлемо. [ 4 ]
Безопасность
[ редактировать ]Прежде чем приступать к такому типу поиска, дайверы должны быть хорошо обучены общим навыкам дайвинга. Водолаз-поиск несет ответственность за поддержание достаточного натяжения поискового троса, чтобы сигналы могли передаваться и приниматься. Если используется поверхностный маркер, провисание лески должно быть минимальным, чтобы избежать запутывания. Это проще всего, если для управления леской используется катушка, или, альтернативно, леска должна быть плавучей, чтобы держать ее как можно дальше от дайверов, но плавучие лески все равно будут иметь тенденцию обертываться вокруг лески в центре, если их достаточно. слабый. [ 4 ]
Джекштей ищет
[ редактировать ]
Подводный поиск штага — процедура, проводимая водолазами , плывущими вдоль поисковой линии — штага .
Существуют различные методы поиска опор.
Процедура
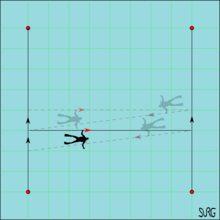
[ редактировать ]Описана процедура поиска с использованием двух неподвижных опор и подвижного поискового троса: [ 3 ]
Расстояние между неподвижными стойками будет зависеть от обстоятельств, но не должно быть настолько большим, чтобы не допустить надежного перекрытия трапов. Это будет зависеть от рельефа дна. В этой поисковой системе обычно используются два дайвера. Два тяжелых подпора укладываются параллельно друг другу по дну зоны поиска. Более легкий подвижный опорный штатив используется для соединения неподвижных опорных стоек на одном конце зоны поиска. Эта линия должна быть достаточно натянута, но она не должна стягивать неподвижные опоры вместе. [ 4 ]
Дайверы стартуют с противоположных концов подвижного штага и плывут вдоль него, при этом каждый дайвер держит трос левой рукой (или правой, но оба должны использовать одну и ту же руку, чтобы держаться по разные стороны от тросика) и визуально осматривает дно. или на ощупь на своей стороне троса, пока он не пройдет мимо другого дайвера и не достигнет другого фиксированного штага, после чего он подаст сигнал другому дайверу о том, что он достиг этой точки, сигналом натяжения на подвижном штаге. [ 1 ] : 141
Когда оба дайвера находятся у фиксированных опор, они смещают подвижную опору вдоль фиксированных опор на согласованное расстояние в зависимости от условий. Расстояние должно быть достаточно большим, чтобы уменьшить чрезмерное перекрытие, но достаточно малым, чтобы не было риска пропустить цель между траверсами. Обычно это означает, что расстояние составляет между досягаемостью дайверов, осуществляющих поиск на ощупь в условиях плохой видимости, и расстоянием, которое они могут видеть по сторонам, плюс ширина цели при хорошей видимости. Необходимо следить за тем, чтобы подвижный опорный стержень всегда перемещался в одном и том же направлении. В условиях плохой видимости это легко спутать, поэтому для предотвращения этой проблемы можно использовать компас. [ 4 ]
Затем дайверы повторяют этот процесс до тех пор, пока не найдут объект или не закончатся фиксированные опоры, время или воздух. Когда дайвер находит объект, он должен сигнализировать об этом другому дайверу, натянув веревку. Второй дайвер может присоединиться к нему, чтобы подтвердить находку и отметить ее или продолжить поиск. Если подвижный опорный штак застрял, водолазы должны освободить его, как только преодолеют корягу. После освобождения коряги, возможно, придется повторить подметание. Способ крепления подвижного подпятника должен быть легко регулируемым, но надежным. [ 4 ]
Если в результате серии проходов объект не обнаружен, один из фиксированных опор можно поднять и переложить на противоположную сторону от оставшегося, и процесс повторяется до тех пор, пока цель не будет найдена или не будет обыскана вся область поиска. [ 4 ]
Вариации на тему поиска опор
[ редактировать ]Если водоем достаточно узкий, команда на поверхности может положить один опорный столб по ширине дна, и дайверы переплывут с одной стороны на другую. Когда они достигают конца троса в воде, надводная команда продвигает опору на соответствующую величину, поднимая ее, перемещая параллельно исходному положению и снова кладя, после чего дайверы делают еще один подъем. Это повторяется столько раз, сколько необходимо.
Другой метод, иногда называемый поиском «J» и подходящий для дайвера-одиночки, предполагает, что дайвер или дайверы начинают с одного и того же конца линии поиска, которая аналогичным образом устанавливается вдоль края зоны поиска. Два дайвера плывут вместе, по одному с каждой стороны линии, таким образом обыскивая территорию сразу по обе стороны от линии. [ 4 ]
Завершив обыск, они перенесли конец лески на несколько метров дальше в зону поиска, так что теперь леска проходит под небольшим углом к своему первоначальному курсу. Затем они возвращаются вдоль линии, либо снова обыскивая большую часть той же территории, либо просто возвращаясь к исходной точке. Достигнув начальной точки, они перемещают другой конец лески на несколько метров дальше в зону поиска, чтобы леска снова стала параллельной исходному положению. [ 4 ]
Они повторяют эту схему до тех пор, пока не будет обнаружен объект поиска или пока не охватят всю зону поиска. Этот второй метод более длинный и медленный и чаще используется либо в условиях крайне ограниченной видимости, когда дайверы не хотят терять контакт друг с другом, либо когда искомый объект особенно мал, и они хотят выполнить схему дважды. один раз с каждой стороны, в случае, если объект маскируется более крупным объектом на морском дне при подходе с одной стороны, и особенно когда для поиска доступен только один дайвер. [ 4 ]
Безопасность
[ редактировать ]Дайверы должны быть хорошо обучены, прежде чем приступать к такому типу поиска. Дайверов-одиночек следует использовать только в том случае, если оценка риска показывает, что риски приемлемы, и желательно указывать свое положение с помощью маркера на поверхности или поддерживать связь с поверхностью с помощью линии или голоса.
Поиск препятствий
[ редактировать ]
Когда объект поиска достаточно велик и имеет подходящую форму, чтобы зацепиться за перетаскиваемую линию, для ускорения процесса можно использовать линию-зацепку. Коряга может использоваться с парой фиксированных опор или в качестве дальнего троса для кругового поиска. Часто это взвешенная линия, хотя бывают случаи, когда это не требуется. Коряга натягивается дайвером или дайверами, которые затем тянут его по дну, либо следуя за опорами, либо плывя по дуге, пока он за что-нибудь не зацепится. Когда это происходит, водолазы закрепляют концы коряг на месте, привязывая их к опорам или привязывая к земле, и плывут вдоль коряг, чтобы идентифицировать цель. Если это объект поиска, они отметит ее, в противном случае они освобождают леску, перемещают ее над целью, возвращаются к своим концам и продолжают подсечку. [ 3 ] [ 4 ]
Экстренные поиски в пещерном дайвинге
[ редактировать ]Отделение от ориентира в пещере может стать опасной для жизни чрезвычайной ситуацией. Если дайвер теряет ориентир, его первоочередной задачей является найти его снова. Для остальных членов команды, если они не потеряли ориентир, поиск потерянного приятеля является вторым приоритетом после обеспечения собственной безопасности. Обе эти ситуации являются чрезвычайными ситуациями, на которые пещерных дайверов учат реагировать, но не существует метода, гарантирующего успех в решении любой проблемы во всех ситуациях. Это риск, который аквалангисты должны принять, если они решат погружаться в пещеры.
Поиски потерянного ориентира
[ редактировать ]При нырянии с проникновением существует два типа ситуации потери шнура. Один из них — когда прыгун отделен от линии и не знает, где находится он или другие прыгуны, а другой — когда команда обнаруживает, что ориентир впереди них сломался и другого конца не видно. Первый тип — опасная для жизни дайвера, потерявшего трос, второй тип — опасная для жизни дайверской команды аварийная ситуация, если она возникает во время выхода, но неудобство на подходе, так как они могут развернуться. вернуться в любой момент, хотя попытка найти другой конец и починить линию является нормальной практикой.
Потеря ориентира в пещере — потенциально опасная для жизни чрезвычайная ситуация. Хотя следование рекомендуемым рекомендациям делает маловероятной потерю дайвером шнура, это может случиться и действительно случается, и существуют процедуры, которые обычно помогают найти его снова. Любая достоверная информация о том, где может находиться дайвер относительно последнего известного положения троса, может иметь решающее значение, и процедура выбора будет зависеть от того, что достоверно известно. Во всех ситуациях дайвер постарается стабилизировать ситуацию и избежать дальнейшей потери, а также провести тщательную визуальную проверку во всех направлениях от того места, где он находится в данный момент, принимая во внимание возможность попадания лески в ловушку . Если дайвер также не отделился от своего напарника, напарник может знать, где находится линия, и его можно спросить, а если дайвер отделен от своего напарника, напарник может находиться на линии, и свет напарника может быть виден. . [ 5 ]
Стабилизация положения обычно достигается путем нахождения ближайшей возможной точки привязки и надежного привязывания поисковой линии. Должно быть известно направление направляющей линии, когда ее видели в последний раз, и, следовательно, направление, в котором ныряльщик плыл до потери лески. Если дайвер имел нейтральную плавучесть, следуя по тросу, приблизительную глубину можно восстановить, снова определив глубину нейтральной плавучести, без корректировки надувания компенсатора плавучести или сухого костюма. Если дайвер не потерял веревку, не заметив изменения направления, то, скорее всего, она находится примерно на той же глубине, почти в том же направлении и на таком же боковом и вертикальном расстоянии, как и тогда, когда ее видели в последний раз, поэтому логично попытаться это направление в первую очередь. Подплывая к расчетному положению лески и медленно проводя поисковую леску, дайвер будет искать визуально, а в условиях плохой видимости или темноты - еще и наощупь, делая взмахи руками поперек ожидаемого направления лески, защищая при этом голову от удара. другой рукой. Расстояние, пройденное до предполагаемого положения потерянной лески, можно измерить по расстоянию и количеству узлов, выпавших на поисковой леске. Если поиск не удался, дайвер вернется к исходной точке и попытается еще раз попытаться определить следующее наилучшее направление, в котором может быть линия. [ 5 ] Дайвер также может попробовать другой метод поиска. Лучший метод поиска в любой конкретной ситуации будет зависеть от условий воды, расположения участка пещеры, способа прокладки троса, ситуационных знаний и навыков дайвера, а также имеющегося оборудования – метод, который был бы идеальным. в одной ситуации может вообще не работать в другой.
Если веревка найдена, а другие дайверы - нет, дайвер может привязать свою поисковую катушку к направляющей леске в качестве индикатора для других членов команды, что они потерялись, но нашли направляющую линию, и указать направление, в котором они находятся. намерены двигаться по указанному маршруту с личным указателем направления, чтобы другие, кто увидит его во время поиска пропавшего дайвера, знали, правильное ли направление выбрал дайвер для выхода из пещеры. [ 5 ] Компас обычно является надежным индикатором направления в пещере, но он полезен только в том случае, если дайвер знает приблизительное направление, в котором он плыл, прежде чем потерять леску, поскольку в некоторых пещерах направление вдоль проходов часто меняется.
Поиск потерянного приятеля
[ редактировать ]Дайвер, находящийся на неповрежденном ориентире, обычно не считается потерянным. Потерялся дайвер, потерявший направляющую линию, поэтому самое важное при поиске потерявшегося дайвера - не потерять направляющую линию. Обычно это ситуация, обратная ситуации с потерей направляющей линии: дайвер теряет контакт со своим напарником или командой, но остается в контакте с направляющей линией, поэтому сам не теряется. Их первоочередной задачей является не заблудиться и не дезориентироваться, и для достижения этой цели они прикрепят к направляющей линии указатель направления, указывающий направление к выходу, прежде чем начинать поиск. Линию поиска можно привязать к указателю направления, чтобы она не скользила по линии во время поиска. Направление поиска будет зависеть от планировки этой части пещеры и от того, где в группе должен был находиться пропавший дайвер. Поисковая группа должна в первую очередь подумать о своей собственной безопасности, а именно о том, сколько газа они могут себе позволить использовать при поиске, что будет зависеть от этапа погружения, на котором дайвер будет замечен пропавшим без вести. При поиске в темноте искателям следует периодически выключать фонари, так как это позволит им легче увидеть фонарь потерявшегося дайвера. [ 5 ]
Шаблоны поиска, управляемые направлениями компаса
[ редактировать ]Поиск по спирали
[ редактировать ]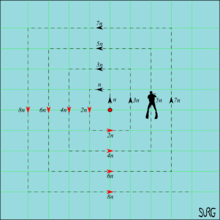
Поиск подводного спирального ящика - это процедура поиска, проводимая дайвером, плывущим вокруг начальной точки по схеме, основанной на направлениях компаса и увеличении расстояний. Узор напоминает направленную наружу спираль с прямыми сторонами и равными расстояниями между ножками, плывущими на одном и том же направлении. Ноги обычно плавают с изменением направления между ними на 90 градусов, и очень часто для удобства навигации используются стороны света. Спираль может быть направлена по часовой стрелке или против часовой стрелки, и теоретически не существует предела охватываемой области. На практике дайвер может столкнуться с препятствием, например с берегом, или у него закончится воздух или энергия, что приведет к прекращению действия схемы. Обнаружение указанной цели также в большинстве случаев приведет к прекращению поиска. [ 1 ] : 143
Процедура
[ редактировать ]Техника заключается в том, чтобы начать с предполагаемого положения цели, на расстоянии выше дна, чтобы обеспечить лучший обзор, и проплыть в кардинальном направлении на расстояние, примерно равное дальности видимости или немного превышающее ее. Расстояние обычно оценивается по количеству ударов, поэтому необходимо использовать целое количество ударов, желательно такое, которое дайвер может мысленно накопить. Назовите это расстояние n ударов, где n обычно равно 2, 4, 5, 10 или 20, поскольку эти числа легко умножить в уме. Направление поворота может быть по часовой стрелке или против часовой стрелки, в зависимости от того, что лучше всего подходит для поиска.
Например: ныряльщик плывет n ногой на север, поворачивает налево и плывет n пинков на запад, затем поворачивает налево и плывет 2n гребков на юг, снова влево и 2n гребков на восток. Затем снова налево и 3n пинаем на север, влево и 3n пинаем на запад. Схема повторяется путем добавления n дополнительных ударов ногами каждый второй ход и всегда поворотов в одну и ту же сторону. Если на каком-либо этапе прыгун захочет вернуться в исходную точку, он проплывет половину счета, затем следует обычный поворот и еще один счет половины ноги.
Приложения
[ редактировать ]Такая схема поиска особенно подходит для случаев, когда приблизительное положение объекта поиска известно, но дайверы не имеют возможности установить маркер положения или линии поиска, но имеют компас и навыки его эффективного использования. На схему не сильно влияют препятствия и потенциальные препятствия, но лучше всего она работает с целями, которые относительно легко увидеть, что обычно подразумевает довольно большой размер и достаточно хорошую видимость. Расстояние между параллельными опорами выбрано для удобства подсчета и достаточного перекрытия, чтобы обеспечить хорошую вероятность обнаружения цели.
Схема не подходит для воды с течением, хотя умеренный всплеск не оказывает большого влияния на точность, при условии, что горизонтальное движение из-за всплеска не превышает перекрытия между двумя соседними параллельными участками. Ошибки накапливаются: возврат к центру — хорошая проверка точности. Если дайвер окажется близко к начальной точке, значит, рисунок проплыл точно.
Поиск по сетке компаса
[ редактировать ]Поиск по подводной компасной сетке - это схема поиска, проводимая дайвером, плывущим по параллельным линиям по компасному пеленгу и обратному ему направлению при визуальном поиске территории, граничащей с маршрутом. Расстояние между линиями выбрано таким образом, чтобы обеспечить достаточное перекрытие, чтобы обеспечить высокую вероятность обнаружения цели поиска, если дайвер пройдет мимо. Кардинальные направления часто выбираются для удобства навигации, но топографические ограничения могут диктовать направление, которое лучше подходит для данного участка.
Процедура
[ редактировать ]Дайвер или дайверы проплывают заранее подготовленные курсы компаса, расположенные в виде сетки, чтобы охватить зону поиска.
Приложения
[ редактировать ]Для быстрого охвата большой зоны поиска можно одновременно задействовать большое количество дайверов, или же один дайвер может методично работать в одной и той же зоне. Схема ограничена относительно низкими скоростями течения, поскольку течение сбивает дайверов с запланированного пути.
Поиск по лестнице
[ редактировать ]Этот шаблон представляет собой версию поиска по сетке, в которой длина участка относительно коротка. Он более ограничен, но хорошо работает в узких проходах, таких как река или канал. Шаблон поиска плавает взад и вперед по обратным направлениям с одинаковым смещением в одном направлении в конце каждого участка. Направление ног обычно определяется каким-либо географическим объектом, и безель компаса можно установить в этом направлении. Если направление русла изменится, возможно, потребуется соответствующим образом изменить направления участков поиска, чтобы они оставались примерно поперечными руслу. Смещение не имеет решающего значения для направления, и пока оно примерно правильное, все в порядке. Длина поисковых участков обычно также определяется некоторыми физическими особенностями, такими как ширина канала или глубина 10 м, и эти участки могут не иметь постоянной длины. Важно то, что они параллельны и каждый смещен на одинаковую величину в одном направлении, чтобы область поиска была полностью покрыта. Шаблон поиска во многом соответствует шаблону поиска по сетке Jackstay и иногда называется поиском по U-образному шаблону. [ 6 ]
Поиск линии для плавания
[ редактировать ]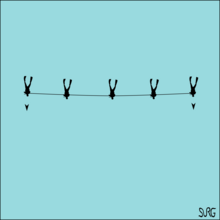
Это визуальный эквивалент поиска по труднодоступным местам. Команда водолазов рассредоточивается по веревке на расстоянии, соответствующем видимости, рельефу местности и размеру цели. Руководитель группы теоретически может находиться где угодно на веревке, но обычно он находится на одном конце или в середине. Он плывет по постоянному курсу, известному всем ныряльщикам, плывущим по одному и тому же курсу. Каждый прыгун должен следить за тем, чтобы он не опережал и не отставал от прыгуна, стоящего ближе к ведущему, и чтобы веревка была натянута. Таким образом, равномерно расположенная линия прыгунов плывет по прямой, ширина которой равна длине плавательной линии. Это может сработать, но требует концентрации и некоторой практики, поскольку все дайверы также должны усердно искать цель. Метод плавательной линии также можно применить к круговой схеме, но это неэффективно и обычно плохо скоординировано, поскольку направление постоянно меняется. Вариант этой схемы, который может работать, - это река или канал, где концы контролируются тендерами на берегу, которые могут общаться и проводить леску по изгибам. Сложности возникают при изменении ширины, но с большинством из них можно справиться, планируя заранее. Линейные сигналы могут дать дайверам указание отрегулировать расстояние в соответствии с условиями. [ 3 ] [ 4 ]
Поиски, направленные с поверхности
[ редактировать ]Направлено с поверхности
[ редактировать ]Дайвер, который поддерживает связь с поверхностью с помощью линейных сигналов или голосовой связи, может быть направлен в зону поиска и вокруг нее с поверхности. Это имеет относительно ограниченную сферу применения, но в некоторых случаях может сработать, особенно когда у наземной группы есть гидролокационное изображение цели и дайвера в режиме реального времени в условиях плохой видимости. Это можно считать не поиском, поскольку цель видна и ее положение известно, но не всегда возможно получить точную идентификацию, пока дайвер не доберется до нее, и может быть несколько потенциальных целей, которые необходимо проверить. Этот метод также иногда используется, когда приблизительное положение можно определить с поверхности, но дайверу все равно необходимо один раз выполнить поиск в желаемом положении. [ 4 ]
Буксируемые поиски
[ редактировать ]Для проведения визуальных поисков за лодкой можно буксировать одного или двух водолазов со скоростью до 3,5 или 4 км/ч. Они управляют и контролируют глубину с помощью буксировочной доски, которая может быть оснащена безопасным быстроразъемным механизмом и опускаться поплавком для обозначения целей. [ 7 ]
Подходит для поиска больших целей при хорошей видимости. Дайвер должен быть осторожен и не всплывать слишком быстро. Когда цель будет замечена, дайвер отсоединит доску и поднимет маркерный буй, который укажет положение цели и дайвера, позволяя лодке осторожно приблизиться, пока дайвер всплывает. Схема поиска контролируется капитаном судна и может следовать по маршруту, определенному GPS. Если видимость достаточно хорошая или вода неглубокая, дайверы могут осуществлять поиск, буксируя на поверхности. [ 8 ]
Обыски с использованием специального оборудования
[ редактировать ]Ручные гидролокационные транспондеры
[ редактировать ]
Дайверы могут использовать гидролокаторы. Они используют активный гидролокатор (транспондеры, которые излучают сигнал и измеряют силу обратного сигнала для определения препятствий в заданном направлении) или пассивный (транспондеры, которые измеряют сигнал, излучаемый целью).
Передатчик сигнала, прикрепленный к целевому комплекту приборов, часто используется, чтобы позволить ученым относительно быстро восстановить приборы, когда положение не может быть отмечено на поверхности буем. Дайвер имеет при себе приемник, который настроен на частоту передатчика и обычно способен указывать силу сигнала и направление, что позволяет дайверу двигаться к нему по довольно прямому маршруту. Передатчик может срабатывать по кодированному гидролокационному сигналу с поверхности или по таймеру.
Приборы инерциальной навигации, которые можно использовать для определения точного местоположения дайвера, можно использовать для следования запланированному шаблону поиска почти так же, как используется компас, но они лучше работают на течениях, поскольку они определяют абсолютное положение и направления.
Другие шаблоны поиска
[ редактировать ]Текущий поиск дрифта
[ редактировать ]Водолазы располагаются поперек направления течения и занимаются поиском, пока течение уносит их по дну. Обычно за ними следят с поверхности с помощью маркерных буев, чтобы можно было оценить эффективность охвата, и поиск, вероятно, будет наиболее эффективным при хорошей видимости и в районах, где скорость течения достаточно постоянна. По своему эффекту это очень похоже на визуальный поиск по плавательной линии, и эти методы можно комбинировать.
Поиск контуров глубины
[ редактировать ]Круто наклоненное дно иногда может быть эффективно обнаружено водолазами, плывущими на постоянной глубине, следуя контурам дна. Контроль глубины может осуществляться по манометру, но очень эффективно его можно осуществить путем буксировки буя-маркера поверхности с длиной троса, установленной на желаемую глубину, при условии, что поверхность не слишком неровная.
Коммуникация
[ редактировать ]Большинство дайверов общественной безопасности и многие дайверы- любители общаются с помощью линейных сигналов во время поисков под водой с аквалангом. В некоторых юрисдикциях дайверы общественной безопасности могут требовать использования голосовой связи, которая может осуществляться через водные или проводные системы. Водолазы с поверхности общаются с командой поддержки на поверхности по проводной телефонной связи.
Глубокая вода и большие площади
[ редактировать ]Лишь со второй половины двадцатого века были разработаны технологии, способные обнаруживать небольшие объекты на морском дне и позволяющие поднимать объекты с гораздо большей глубины, чем могут работать дайверы. Разработка буксируемого гидролокатора бокового обзора и аналогичных технологий повысила вероятность успешных глубоких поисков. Перетаскивание с помощью крюков, поиски водолазами и поиск с использованием гидролокатора низкого разрешения ранее были инструментами, доступными для поиска в океане. Такие поиски были трудными, ограниченными по глубине и имели очень низкую вероятность успеха. [ 9 ] : Ч. 1
Подводный поиск является основным аспектом глубоководных спасательных операций, поскольку прежде чем объект можно будет найти, его сначала необходимо найти, осмотреть и идентифицировать, а также записать его положение, чтобы его можно было вернуть при необходимости. Поиски на глубокой воде часто бывают сложными и трудными, и хорошее планирование и подготовка, а также точное выполнение плана увеличивают шансы на успех. [ 9 ] : Ч. 2
Основными факторами, которые следует учитывать при планировании поисковой системы, являются: [ 9 ] : Ч. 2
- имеются ли акустические пингеры, транспондеры или другие средства определения местоположения.
- качество данных – точность и достоверность существующей информации о местоположении,
- целевые характеристики (размер, материал и характеристики распада),
- глубина воды и другие характеристики,
- тип и топография морского дна,
- преобладающие погодные условия,
- географическое положение,
- наличие оборудования.
Поисковые датчики
[ редактировать ]Звук хорошо проникает через воду по сравнению со светом и большинством других электромагнитных излучений, поэтому датчики, использующие активные звуковые сигналы, имеют относительно хороший радиус действия, но, поскольку разрешение зависит от частоты, сонар имеет ограниченное разрешение для работы на больших расстояниях. Пассивное обнаружение звука имеет гораздо большую дальность действия, но в лучшем случае может определить приблизительное направление источника. Проникновение света намного меньше, чем звука, и ограничено мутностью и поглощением, при этом сине-зеленые частоты меньше всего подвержены влиянию поглощения в чистой воде и обеспечивают высокое разрешение, но очень ограниченный диапазон. Вариации магнитного поля не ограничиваются проникновением, но имеют чрезвычайно низкое разрешение и слабую напряженность поля, а датчики ограничены обнаружением наличия магнитной аномалии.
Эхолоты
[ редактировать ]Одно- и многолучевые эхолоты — это разновидность гидролокаторов, позволяющих измерять профиль дна вдоль пути судна. Обычно однолучевые эхолоты устанавливаются на судне стационарно, а массивы преобразователей монтируются через корпус. [ 9 ] : Ч. 2 Многолучевые системы могут быть стационарными или переносными, монтируемыми сбоку или буксируемыми. Разрешение зависит от частоты и высоты над дном, диапазон глубин в некоторой степени зависит от частоты, а точность зависит от точности данных о положении датчиков. Гидролокационные поиски обычно полагаются на экспертную интерпретацию человеком созданного компьютером изображения топографии дна для обнаружения и идентификации цели.
Гидролокатор бокового обзора
[ редактировать ]В гидролокаторе бокового обзора используются акустические преобразователи, буксируемые под водой, для получения изображения морского дна в плане, показывающего детали топографии и артефакты по бокам трассы. Полоса морского дна, охватываемая за один проход гидролокатора бокового обзора, относительно широка, и поэтому это относительно эффективная поисковая система с высокой достоверностью обнаружения и идентификации цели, которая считается одним из наиболее эффективных инструментов подводного поиска. [ 9 ] : Ч. 2
Эффективное разрешение гидролокатора бокового обзора во многом зависит от рабочей частоты; чем выше частота, тем выше разрешение, но ширина полосы обзора обратно пропорциональна частоте, поэтому чем выше частота, тем меньшая площадь морского дна покрывается за один проход. [ 9 ] : Ч. 2
Пингер-локаторы
[ редактировать ]Пингер-локаторы — это класс пассивных акустических поисковых систем, которые не издают никакого звука, а обнаруживают звук только в определенном диапазоне частот. Они полезны для поиска предметов, оснащенных акустическим маяком (пингером) для облегчения определения местоположения, например, диктофоны в кабине экипажа и самописцы полетных данных, используемые почти на всех военных и коммерческих самолетах, которые имеют акустический пейджер частотой 37 кГц, помогающий определять местонахождение. их в случае крушения на море. [ 9 ] : Ч. 2
Пингер-локаторы, использующие всенаправленный гидрофон, имеют максимальную дальность обнаружения около одной морской мили (1850 метров). Всенаправленный гидрофон не может предоставить информацию о пеленге, поэтому необходимо сделать несколько проходов по пингеру, чтобы точно определить его положение. Пингер-локатор, использующий настроенную антенную решетку с гидрофоном узкого направленного действия, может давать информацию о направлении и имеет увеличенную дальность обнаружения примерно до двух морских миль. Буксируемые локаторы-пингеры (TPLS) буксируются через зону поиска так же, как гидролокатор бокового обзора, но с более высокой скоростью. Из-за большой дальности действия они, как правило, эффективны при обнаружении цели за более короткое время. Пингер-локаторы, предназначенные для ручных операций с поверхности или водолазов, имеют меньшую дальность действия. [ 9 ] : Ч. 2
Магнитометры
[ редактировать ]Магнитометры чувствительны только к электромагнитным полям, отличным от местного геомагнитного поля. В большинстве случаев, связанных с утилизацией, это довольно большая масса стали или железа. Они имеют относительно ограниченную дальность обнаружения, поскольку цель обычно не сильно намагничена, а также могут улавливать вулканические породы, если они присутствуют в больших количествах. [ 9 ] : Ч. 2
Сила магнитного сигнала объекта обратно пропорциональна кубу расстояния между датчиком и объектом, поэтому магнитометры не часто используются в качестве основного датчика при поиске в глубоком океане, но они могут быть полезны в качестве вторичного датчика побочного действия. Поиск гидролокатора со сканированием, особенно в ситуациях, когда цель теряется в среде, богатой ложными целями, например, в поле камней, и отраженный сигнал гидролокатора от цели трудно отличить от отраженного сигнала от камней. Путем корреляции положительных сигналов как от гидролокатора бокового обзора, так и от буксируемого в тандеме датчика магнитометра вероятность обнаружения объекта может быть значительно повышена. Магнитометр также является одним из немногих инструментов, способных обнаружить объект, глубоко погребенный в донных отложениях. [ 9 ] : Ч. 2
Системы оптической визуализации
[ редактировать ]Системы оптической визуализации успешно используются при глубоководных поисках в океане как самостоятельно, так и в сочетании с гидролокатором бокового обзора. Очевидным преимуществом системы оптической визуализации является то, что полученное изображение может привести к идентификации цели без необходимости трудоемкой классификации контактов. Фактические чувствительные устройства, используемые для оптического формирования изображений, включают фотокамеры, видеокамеры реального времени и системы лазерной визуализации, использующие лидарную технологию. Фото- и видеокамеры используют обычные стробоскопы или прожекторы в качестве источника освещения. Из-за ограничений, налагаемых ослаблением света и обратным рассеянием, датчики неподвижного изображения и видео должны находиться на расстоянии от 10 до 20 метров от цели, чтобы идентифицировать ее. Система лазерной визуализации использует синий/зеленый лазер в качестве источника освещения для минимизации проблем затухания и обратного рассеяния и может отображать цели на расстоянии до 50 метров. Недостатками этих систем являются высокая чувствительность к мутности и видимости под водой, а также относительно очень узкая ширина полосы обзора и дальность действия по сравнению с гидролокатором, что приводит к относительно низкой высоте буксировки и низкой общей скорости поиска. [ 9 ] : Ч. 2
Другие инструменты поиска
[ редактировать ]Данные поисковых датчиков сами по себе не очень полезны. Точное положение и ориентация датчика во время сбора данных необходимы для ссылки на трехмерное географическое положение обнаруженных контактов, чтобы их можно было проанализировать и, где это возможно, идентифицировать либо как цель поиска, либо как ложноположительные результаты, и чтобы можно было вернуться к любому контакту для дальнейшего расследования или восстановления. [ 9 ] : Ч. 2
Навигационные системы
[ редактировать ]Точная и воспроизводимая навигация является важным требованием для глубоководных поисковых операций. Основными требованиями являются способность вести судно по запланированной схеме поиска, точно отслеживать положение датчиков на поисковом судне или буксире и возвращаться в любое положение в более позднее время. [ 9 ] : Ч. 2 Позиции, регистрируемые поисковыми датчиками, относятся к положению и ориентации датчиков в данный момент, поэтому точность данных зависит от точности навигационной системы, хотя постобработка данных для дифференциальных поправок GPS возможна, если DGPS не используется. доступны в режиме реального времени.
Анализ данных о потерях
[ редактировать ]Анализ данных о потерях — это процесс определения области поиска и наиболее вероятного местоположения цели путем сбора и анализа всей доступной информации, связанной с потерей объекта. Эта задача является началом процесса планирования и обычно влияет на другие действия по планированию, такие как выбор оборудования и разработка схемы поиска. Первым шагом является сбор всей доступной информации с фактического места происшествия. Для этого может потребоваться непосредственный выезд специалиста по поиску на место происшествия для скорейшего опроса очевидцев, поскольку общеизвестно, что информация со временем ухудшается. Обычно важна следующая информация: [ 9 ] : Ч. 2
- Времена утраты и другие связанные с этим события.
- Рассказы очевидцев и выживших, описывающие потерю.
- Место потери или последнего контакта с объектом
- Расположение плавающего мусора.
- Положение спасателей.
- Погодные условия на момент потери
- Состояние воды на момент потери
Вся информация и ее источники должны быть проанализированы на предмет возможной точности. Обычно некоторые данные будут противоречивыми, и придется выносить суждение относительно вероятности точности каждого из них. Рамка области поиска вокруг наиболее вероятного положения морского дна должна учитывать совокупную ошибку или неопределенность, присущую вычисленному положению. Уровень уверенности в том, что цель находится в поле поиска, должен быть высоким до начала фактического поиска. [ 9 ] : Ч. 2
Анализ вероятности поиска
Анализ вероятности поиска предполагает анализ данных о потерях далее путем определения наиболее вероятного местоположения цели. Поле области поиска разделено на более мелкие области, называемые ячейками, каждой из которых назначается собственная расчетная вероятность нахождения цели в этой ячейке. Карта этих ячеек укажет, где следует сосредоточить поиск, чтобы повысить вероятность раннего обнаружения цели в большой зоне поиска. [ 9 ] : Ч. 2
Схема поиска на глубокой воде
[ редактировать ]Качество шаблона поиска измеряется тем, насколько тщательно и эффективно исследуется область поиска. Систематическое обследование района поиска достигается путем следования запланированной схеме, адаптированной к конкретным условиям поиска. [ 9 ] : Ч. 2
Существуют схемы поиска, которые оказались одновременно эффективными и практичными для поиска в глубоком океане. Важным общим правилом поиска с помощью гидролокатора бокового обзора, независимо от того, какая схема поиска используется, является ориентация длинного измерения области поиска так, чтобы она была примерно параллельна изобатам глубины, что сводит к минимуму необходимость внесения изменений в буксир. высоты для поддержания достаточно постоянной высоты (высоты над дном) и ширины полосы обзора, что приводит к более стабильным характеристикам сонара и меньшему риску пропущенных областей и чрезмерного перекрытия полосы обзора. Ухудшение сигнала может произойти на стороне спуска при движении вдоль контуров, но это предпочтительнее, чем плохой сигнал от буксира, когда его буксируют вверх и вниз. Расстояние между путями можно адаптировать для компенсации. [ 9 ] : Ч. 2
Параллельный поиск по сетке
[ редактировать ]Наиболее часто используемая схема поиска для буксируемого датчика представляет собой прямоугольную сетку с прямыми поисковыми путями, параллельными друг другу. Соседние поисковые траектории расположены достаточно близко, чтобы обеспечить перекрытие зоны действия гидролокатора, чтобы компенсировать изменения курса корабля и траектории буксировки гидролокатора, а также компенсировать присущие потери в возвратном сигнале и разрешении гидролокатора на внешних краях, вызванные изменениями глубины. [ 9 ] : Ч. 2
Судно должно изменить курс и стабилизировать курс, выровняв буксир и на правильной глубине в конце каждого троса и перед повторным входом в зону поиска. Буксир будет стремиться изменить глубину с изменением скорости, и необходимо следить за тем, чтобы он не ударился о дно во время поворотов. Чтобы правильно выровнять буксир при работе на глубокой воде, может потребоваться прямой пробег в несколько километров, поэтому время, необходимое для поворотов, может превышать время фактического поиска. [ 9 ] : Ч. 2
Поиск постоянного диапазона
[ редактировать ]Поиски постоянной дальности применяются, если навигационная система судна не имеет возможности навигации по прямым линиям. В этом шаблоне используются линии поиска, находящиеся на постоянном расстоянии от фиксированной контрольной точки. При использовании гидролокатора бокового обзора расстояние от центральной точки кривых должно быть достаточно большим, чтобы получить достаточно прямой сегмент, поскольку непрямые траектории ухудшат изображение гидролокатора бокового обзора и затруднят интерпретацию. сложнее. [ 9 ] : Ч. 2 Учитывая повсеместное распространение глобальных навигационных спутниковых систем, этот метод представляет в основном исторический интерес.
"Z" поиск
[ редактировать ]Шаблоны поиска «Z» используются специально для определения местоположения подводных объектов. трубопровода или кабеля и могут быть очень эффективными, поскольку они по существу охватывают всю область поиска с немного меньшей вероятностью обнаружения, чем поиск по параллельной сетке, но без необходимости 100-процентного покрытия и типичного перекрытия. При поиске «Z» используется линейная природа трубопроводов и кабелей, гарантируя, что буксируемый датчик несколько раз пересечет объект под разумным углом для обнаружения. Если объект обнаружен с высокой уверенностью при первых нескольких проходах, шаблон можно изменить таким образом, чтобы линии пути были укорочены, чтобы просто охватывать объект и в конечном итоге непрерывно следовать за ним в пределах диапазона датчика. Основные недостатки поиска по букве «Z» заключаются в том, что ориентация объекта должна быть известна заранее, а фактический момент обнаружения непродолжителен и может быть упущен. По этой причине рекомендуется использовать одновременно гидролокатор бокового обзора и магнитометр. [ 9 ] : Ч. 2
Поисковое покрытие
[ редактировать ]Покрытие поиска — это площадь морского дна, эффективно проверяемая датчиками. Его площадь равна эффективной ширине полосы обзора датчика и расстоянию, пройденному поисковым судном по его маршруту. Это также относится к повторному покрытию области: один проход соответствует 100-процентному покрытию области, а два прохода по одной и той же области равны 200 процентам для этой области. Качество поиска частично зависит от того, насколько хорошо исследована область поиска. Иногда при беглом поиске можно найти объект, но всегда следует планировать тщательный поиск и полностью охватить область поиска. [ 9 ] : Ч. 2
Ширина полосы обзора — это боковой охват морского дна поисковым датчиком, перпендикулярным пути. В его основе лежит дальность обнаружения цели для ожидаемого рельефа дна. Разрешение датчика обратно пропорциональна ширине полосы обзора, особенно для гидролокатора бокового обзора: чем больше ширина полосы обзора, тем ниже разрешение. [ 9 ] : Ч. 2 Ширина полосы захвата также зависит от высоты датчика и уклона дна и варьируется в зависимости от профиля дна.
Расстояние между полосами движения — это расстояние между двумя соседними путями в сетке. поиск. Расстояние между полосами движения должно быть меньше ширины полосы обзора датчика, чтобы обеспечить достаточное перекрытие дальности и полный охват зоны поиска. Расстояние между гусеницами вместе с валком Ширина определяет степень охвата области поиска и в конечном итоге качество поиска. По мере уменьшения расстояния между полосами движения увеличивается охват и качество поиска, поскольку за два отдельных прохода датчика исследуется больший процент морского дна. Меньшее расстояние между полосами движения обеспечивает более тщательное покрытие, но увеличивает время поиска, поскольку через заданную зону поиска необходимо совершить больше проходов. [ 9 ] : Ч. 2
Перекрытие диапазона — это область морского дна, которая исследуется дважды при последовательных проходах. Это обеспечивает запас безопасности для смягчения изменений курса судна и траектории движения датчиков, а также компенсирует неотъемлемую потерю качества сигнала гидролокатора на внешних диапазонах. Необходимое количество перекрытия диапазонов следует оценить перед началом поиска. Обычное перекрытие дальности действия гидролокатора бокового обзора составляет 50 %, что достигается за счет использования полосы движения. расстояние, составляющее 50% ширины полосы захвата. В этом сценарии вся область морского дна между двумя внешними дорожками окна поиска должна быть просканирована дважды. [ 9 ] : Ч. 2
Время поиска — это время, затрачиваемое на поиск, и оценивается при планировании. Возможно только грубое приближение, поскольку цель может быть обнаружена почти сразу, не найдена вообще или через промежуточный период времени, вызванный непредвиденными обстоятельствами. Основная информация, используемая для расчета, — это размер площади, подлежащей обустройству. обыскиваемого, расстояние между полосами движения, которое будет использоваться во время поиска, приблизительную скорость поискового судна и оценку времени поворота до конца линии с учетом глубины воды. [ 9 ] : Ч. 2
Классификация контактов — это процесс анализа контактов от датчиков. Классификация — это процесс интерпретации, который зависит от целевых отличительных характеристик, являющихся эталоном, с которым сравниваются контакты. Возможно, удастся идентифицировать контакт может считаться потерянным объектом без необходимости углубленного анализа, но при сложных поисках, включающих множество объектов и многочисленные ложные контакты, процесс классификации может занять дни или недели. Количественный анализ, который может быть выполнен на контактах гидролокатора бокового и многолучевого обзора, включает измерение интенсивности гидроакустического сигнала, возвращаемого контактом, измерение горизонтальных размеров цели. получить и высоту контакта с морским дном. Точные данные о положении контактов также могут быть полезны при интерпретации данных. Качественный анализ контакта – это интерпретация специалиста по поиску на основе опыта. Продуктом этого анализа является список контактов, ранжированных по приоритетности для последующего наблюдения и идентификация. [ 9 ] : Ч. 2
Поисковые платформы
[ редактировать ]Надводные суда могут вести поиск с помощью датчиков, установленных на судне, или с помощью буксируемых датчиков. Подводные аппараты с экипажем, ROV и AUV могут осуществлять поиск с использованием оптического, гидроакустического и магнитометрического оборудования обнаружения. [ 9 ] : Ч. 1
Надводные суда
[ редактировать ]Надводные корабли могут вести поиск под водой с помощью гидролокатора и магнитометрического оборудования. [ 10 ] [ 11 ] Иногда возможен и оптический поиск. Датчики и матрицы датчиков могут быть установлены на надводных кораблях либо на стационарной установке, либо на установке, которая разворачивается во время использования, и могут быть переносными между судами, что обеспечивает удобное и экономичное использование с возможных судов. Некоторые типы датчиков, такие как гидролокаторы бокового обзора и магнитометры, наиболее полезны, если они развернуты довольно близко ко дну, поэтому их обычно развертывают в виде гидролокационных систем с буксируемой решеткой на буксировщиках , буксируемых за надводным судном, с отображением и записью. оборудование на буксире. [ 9 ]
Гидролокатор с буксируемой антенной решеткой представляет собой систему гидрофонов , буксируемых за судном на тросе. [ 12 ] Проведение гидрофонов за судном по кабелю длиной в несколько километров позволяет держать датчики группы вдали от собственных источников шума корабля, что значительно улучшает соотношение сигнал/шум и, следовательно, эффективность обнаружения и отслеживания слабых контактов, таких как как тихие подводные лодки с низким уровнем шума или сейсмические сигналы. [ 13 ]
Буксируемая группа обеспечивает превосходное разрешение и дальность действия по сравнению с гидролокатором, установленным на корпусе. Он также закрывает перегородки , слепую зону гидролокатора, установленного на корпусе. Однако эффективное использование системы ограничивает скорость судна, и необходимо позаботиться о защите кабеля и антенной решетки от повреждений.
Снимки гидролокатора бокового обзора могут быть полезны для идентификации объектов, выделяющихся на фоне окружающей топографии. Это особенно полезно на большой глубине и на гладком дне, где цель легко различима. Он менее эффективен в районах, где цель может быть сильно покрыта морской растительностью или иным образом скрыта в сложном рельефе дна. [ 14 ] Сонар создает изображение дна путем построения изображения, полученного по времени между выбросом звукового сигнала преобразователем и приемом эха с заданного направления. Разрешение уменьшается с увеличением расстояния от датчика, но на умеренном расстоянии можно распознать форму человеческого тела, что делает этот метод полезным для операций поиска и восстановления. Массив датчиков, установленный в обтекаемом корпусе (известный как «рыба» или «буксир»), можно буксировать за судном на желаемой глубине для обеспечения подходящего разрешения. Изображение записывается, и положение рыбы относительно судна коррелируется с данными о положении судна, обычно с помощью GPS. Наиболее эффективной является схема поиска, охватывающая всю зону поиска с постоянным относительным положением датчика и буксирного судна. После того, как цель обнаружена, водолаз или ROV обычно дополнительно исследует ее для точной идентификации и принятия других необходимых мер. [ 9 ]
Магнитометр в основном измеряет магнитное поле окружающей среды и может обнаруживать очень небольшие локальные изменения, которые могут указывать на присутствие магнитных материалов. Когда магнитометр буксируется за судном на расстоянии, где магнитное поле буксирующего автомобиля не подавляет сигнал, он может быть чувствительным индикатором изменений, вызванных геологическими отложениями или артефактами. Сигнал коррелирует с входными данными о местоположении, обычно от GPS, чтобы указать на местные магнитные аномалии, которые могут потребовать дальнейшего изучения водолазом или ROV. Поиски с помощью буксируемого магнитометра полезны для обнаружения таких артефактов, как затонувшие корабли и самолеты. [ 14 ] а также может быть полезен для подтверждения обнаружения трубопроводов и кабелей при последовательной буксировке с гидролокатором бокового обзора. [ 9 ]
Погружные аппараты с экипажем
[ редактировать ]На подводных аппаратах с экипажем часто в качестве основного снаряжения монтируются поисковые датчики, поскольку поиски являются обычной задачей, и те же датчики часто используются и для подводной навигации.
Дистанционно управляемые подводные аппараты
[ редактировать ]ROV можно использовать в качестве платформы для датчиков, которая может перемещать датчики вблизи интересующих объектов на дне. Его ценность как инструмента поиска зависит от того, насколько эффективно и результативно его можно использовать для покрытия зоны поиска по сравнению с буксируемыми или установленными на надводных судах системами. ROV ограничен работой на небольших территориях из-за ограничений шлангокабеля по маневренности и дальности действия, но он может быть очень эффективным при поиске конкретных предметов в поле обломков. Бортовые акустические и оптические датчики могут использоваться для обнаружения и идентификации объектов, а манипуляторы могут быть полезны для извлечения объектов в пределах его грузоподъемности. [ 9 ] : Ч. 2
Поиск по окну ROV уникален для операций ROV. Предполагается, что ROV будет полностью обыскивать квадратную область морского дна, а затем переходить к поиску соседней квадратной области тех же размеров. Посредством последовательного поиска соседних ячеек, расположенных в виде сетки, ROV может систематически покрывать зону поиска с разумными ожиданиями полного охвата. Поиск в боксах ROV разработан с учетом эффективной дальности действия сканирующего гидролокатора ROV и объема свободного перемещения, доступного ROV при помощи троса. Поиск начинается с размещения ROV в центре ящика, в то время как корабль поддержки остается над центром ящика. Руководствуясь контактами сонара, которые он улавливает, ROV следует по радиальным линиям от центра коробки, чтобы найти и визуально проверить каждый контакт. [ 9 ] : Ч. 2
Автономные подводные аппараты
[ редактировать ]Автономный подводный аппарат (АНПА) — это роботизированный подводный аппарат, который перемещается под водой, не требуя постоянного участия оператора. АНПА составляют часть более крупной группы подводных систем, известных как беспилотные подводные аппараты . Эта классификация включает в себя неавтономные подводные аппараты с дистанционным управлением (ROV), управляемые и приводимые в действие с поверхности оператором/пилотом через шлангокабель или с помощью дистанционного управления.
Например, усовершенствованная беспилотная поисковая система ВМС США (AUSS) была способна осуществлять поиск с помощью гидролокатора бокового обзора на большой территории и детальный оптический осмотр, после чего она могла возобновить поиск с того места, где он остановился. Для навигации он использовал доплеровский гидролокатор и гирокомпас и мог работать на глубине 6000 метров (20 000 футов). [ 15 ]
AUSS использовал несколько сенсорных систем для поиска и осмотра на большой глубине. В их число входили акустическая связь, доплеровский гидролокатор, сканирующий гидролокатор и оптические датчики, а также компьютеры и программное обеспечение для обработки данных. AUSS может взаимозаменяемо выполнять поиск на обширной территории и немедленную оценку целей, а также может предоставлять данные гидролокатора с высоким разрешением практически в реальном времени на скорости до пяти узлов. Транспортному средству можно дать указание делать фотографии из определенных мест или создавать фотомозаику определенного размера, ориентации и местоположения. Транспортное средство может осуществлять чисто оптический поиск или использовать сканирующий гидролокатор в качестве основного поискового датчика. Эти возможности позволили использовать широкий и универсальный диапазон стратегий поиска. [ 16 ]
Самолет
[ редактировать ]с экипажем Самолеты и дроны могут использоваться для визуального и лидарного поиска в условиях хорошей видимости и на мелководье, а также для поиска по магнитометру.
Активные и пассивные гидроакустические буи могут использоваться для поиска и определения местоположения затопленной подводной лодки.
Они могут стоять на якоре на мелководье или свободно плавать на глубокой воде. и может быть частью долгосрочной системы раннего предупреждения или активно использоваться для выслеживания вражеских судов. Положение цели определяется путем анализа разницы во времени одних и тех же звуковых сигналов, излучаемых или отраженных от цели и принимаемых тремя и более буями. Буи могут устанавливаться с помощью обычных самолетов или вертолетов или кораблей. [ 17 ]
Поиски магнитных целей в воздухе могут осуществляться с использованием систем обнаружения магнитных аномалий (MAD), в которых используется чувствительный магнитометр, установленный на самолете. Это можно сделать для статических целей по схемам поиска, аналогичным тем, которые используются надводными кораблями, или для движущихся целей, таких как подводные лодки, по схемам поиска, оптимизированным для повышения вероятности определения положения движущейся цели. Обнаружение подводных лодок MAD используется для отслеживания текущего положения подводной лодки, о которой известно, что она находится в этом районе, в целях идентификации, подтверждения предполагаемого присутствия, отслеживания перемещений и запуска вооружения. [ 18 ]
С берега
[ редактировать ]Для обнаружения подходящих целей с берега использовались драглайны. Лески с крюками или крюками можно бросать или выносить с берега, а затем втягивать в надежде зацепить цель. После зацепления процедура зависит от того, вероятно ли, что цель будет вытащена, или ее необходимо осмотреть на месте. [ нужна ссылка ]
Трупные собаки используются правоохранительными органами и органами общественной безопасности для обнаружения пропавших без вести тел под водой. Это наиболее эффективно на мелководье и в закрытой воде без сильного течения. Собак также можно перевозить по воде на лодках, чтобы расширить зону поиска или попытаться определить более точное местоположение. [ 19 ] Собаки наиболее эффективны, когда они могут спуститься прямо к поверхности воды, чтобы понюхать и попробовать ее на вкус, для чего требуется лодка с низким надводным бортом. [ 20 ] Поиски собаками подводных трупов осложняются движением воды и ветром, которые отодвигают запах от источника. [ 21 ]
См. также
[ редактировать ]- Спасение дайвера - Спасение потерпевшего бедствие или выведенного из строя дайвера.
- Управление чрезвычайными ситуациями – решение всех гуманитарных аспектов чрезвычайных ситуаций.
- Обыск , также известный как личный досмотр – обыск верхней одежды человека с целью обнаружения скрытых предметов.
- Спасение на море - восстановление корабля или груза после морской аварии.
- Полицейский дайвинг - отрасль профессионального дайвинга, осуществляемая полицейскими службами.
- Поисково-спасательные работы – поиск и оказание помощи людям, терпящим бедствие или находящимся в непосредственной опасности.
- Спасение в воздухе и на море - Скоординированный поиск и спасение выживших на море.
- Боевые поисково-спасательные работы - Восстановление военнослужащих с поля боя и с территорий, оккупированных противником.
- Спасение на поверхностных водах – Спасение человека, находящегося на поверхности водоема.
- Поиски в поверхностных водах . Процедуры поиска предметов или людей, потерянных на поверхности водоема.
- Техническое спасение . Использование специализированных инструментов и навыков для спасения.
- Поиск и спасение в дикой природе . Методы, применимые в дикой природе.
- Обыск и выемка – Полномочия полиции
- Подводный поиск и восстановление - Обнаружение и восстановление подводных объектов.
Ссылки
[ редактировать ]- ^ Перейти обратно: а б с д и ж Бусуттили, Майк; Холбрук, Майк; Ридли, Гордон; Тодд, Майк, ред. (1985). «Использование основного оборудования». Спортивный дайвинг – Руководство по дайвингу Британского подводного клуба . Лондон: Stanley Paul & Co Ltd., с. 58. ИСБН 0-09-163831-3 .
- ^ Перейти обратно: а б Программа дайвинга NOAA (США) (28 февраля 2001 г.). Джойнер, Джеймс Т. (ред.). Руководство NOAA по дайвингу, Дайвинг для науки и технологий (4-е изд.). Силвер-Спринг, Мэриленд: Национальное управление океанических и атмосферных исследований, Управление океанических и атмосферных исследований, Национальная программа подводных исследований. ISBN 978-0-941332-70-5 . Компакт-диск подготовлен и распространен Национальной службой технической информации (NTIS) в партнерстве с NOAA и Best Publishing Company.
- ^ Перейти обратно: а б с д и Ларн, Ричард; Уистлер, Рекс (1993). Руководство по коммерческому дайвингу (3-е изд.). Ньютон Эбботт, Великобритания: Дэвид и Чарльз. ISBN 0-7153-0100-4 .
- ^ Перейти обратно: а б с д и ж г час я дж к л м н Ханеком, Пол; Трутер, Питер (февраль 2007 г.). «Раздел 17: Поиски морского дна». Справочник по обучению дайверов (3-е изд.). Кейптаун, Южная Африка: Подразделение исследовательского дайвинга, Кейптаунский университет.
- ^ Перейти обратно: а б с д «Линейные тренировки» . www.cavediveflorida.com . Архивировано из оригинала 27 ноября 2022 года . Проверено 18 июня 2022 г.
- ^ «4 полезных шаблона поиска с аквалангом для дайверов» . azulunlimited.com . Проверено 8 августа 2024 г.
- ^ Доусетт, Кэти (15 ноября 2016 г.). «Клавиши безопасности, точности поиска при буксировке подводных водолазов» . The Scuba News Canada: Новости оборудования . Архивировано из оригинала 6 августа 2017 года . Проверено 5 августа 2017 г.
- ^ «Шаблоны поиска: поиск строгальной доски» . Поисково-спасательная водолазная группа шерифа округа Вентура . Департамент шерифа округа Вентура. Архивировано из оригинала 24 февраля 2016 года . Проверено 5 августа 2017 г.
- ^ Перейти обратно: а б с д и ж г час я дж к л м н тот п д р с т в v В х и С аа аб и объявление но из в ах «2: Методы подводного поиска и восстановления». Руководство по спасению ВМС США (PDF) . Том. 4: Глубоководные операции S0300-A6-MAN-040 0910-LP-252-3200. Соединенные Штаты. Военно-морское ведомство. Руководитель службы спасения и дайвинга. 1 августа 1993 г. Архивировано (PDF) из оригинала 5 апреля 2023 г. Проверено 11 апреля 2023 г.
- ^ Примечания инструктора: Поиск и восстановление . Порт Элсмир, Чешир: Британский подводный клуб. Сентябрь 2000 года.
- ^ Сакеллариу, Димитрис; Георгиу, Панос; Маллиос, Агеллос; Капсималис, Василиос; Куркумелис, Димитрис; Миха, Параскева; Теодулу, Теотокис; Деллапорта, Катерина (2007). «Поиски древних кораблекрушений в Эгейском море: открытие эллинистических затонувших кораблей Хиос и Кифнос с использованием морских геолого-геофизических методов» (PDF) . Международный журнал морской археологии . 36 (2). Blackwell Publishing Ltd. Оксфорд, Великобритания: 365–381. дои : 10.1111/j.1095-9270.2006.00133.x . S2CID 56327567 . Архивировано (PDF) из оригинала 5 ноября 2021 года . Проверено 4 августа 2017 г.
- ^ Тихавский, Петр; Вонг, Кайнам Томас (январь 2004 г.). «Квазибайесовские границы Крамера – Рао на основе квазимеханики жидкости для пеленгации деформированной буксируемой антенной решетки» (PDF) . Транзакции IEEE по обработке сигналов . Том. 52 (1-е изд.). п. 36. Архивировано из оригинала (PDF) 3 марта 2016 года . Проверено 8 октября 2010 г.
- ^ Копп, Карло (декабрь 2009 г.). «Идентификация под водой с помощью гидролокатора с буксируемой антенной решеткой» (PDF) . Защита сегодня . стр. 32–33. Архивировано (PDF) из оригинала 31 января 2023 г. Проверено 14 апреля 2023 г.
- ^ Перейти обратно: а б Хо, Берт (17 апреля 2017 г.). «Поиск самолетов с помощью магнитометра» . Ocean Explorer: изучение затонувшего наследия атолла Мидуэй . Национальное управление океанографии и атмосферы. Архивировано из оригинала 26 июня 2017 года . Проверено 11 сентября 2017 г.
- ^ Комитет по подводным аппаратам и национальным потребностям, Морской совет, Комиссия по инженерно-техническим системам, Национальный исследовательский совет (1996). «Глава 2: Возможности и технологии подводных аппаратов — автономные подводные аппараты» . Подводные аппараты и национальные нужды (Доклад). Вашингтон, округ Колумбия: Пресса национальных академий. п. 22. Архивировано из оригинала 19 сентября 2021 г. Проверено 4 августа 2017 г.
{{cite report}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Урих, RW; Уотсон, SJ (ноябрь 1992 г.). Глубоководный поиск и инспекция: Концепция работы усовершенствованной беспилотной поисковой системы (AUSS) (PDF) . AD-A265 171 Технический отчет 1530 (Отчет). Архивировано (PDF) из оригинала 14 апреля 2023 г. Проверено 14 апреля 2023 г.
- ^ Вальштедт, Александр; Фредрикссон, Йеспер; Йоред, Карстен; Свенссон, Пер (апрель 1997 г.). Отслеживание подводных лодок с помощью пассивных гидроакустических буев (PDF) . FOA-R-96-00386-505-SE (Отчет). Линчёпинг, Швеция: Институт оборонных исследований, Отдел командования и управления военными технологиями. ISSN 1104-9154 . Архивировано (PDF) из оригинала 11 сентября 2017 г. Проверено 10 сентября 2017 г.
- ^ Кувахара, Рональд Х. (2012). «Компьютерное моделирование тактики поиска при обнаружении магнитных аномалий» . В Хейли, К. (ред.). Теория поиска и приложения . Вторая серия конференций НАТО: Системная наука. Том. 8 (иллюстрированное изд.). Springer Science & Business Media. ISBN 9781461591887 . Архивировано из оригинала 06 марта 2023 г. Проверено 21 октября 2020 г.
- ^ Лист, Кэтрин (15 декабря 2014 г.). «Собака, которая находит подводные тела» . Новостной сайт BBC Scotland . Архивировано из оригинала 11 сентября 2017 года . Проверено 11 сентября 2017 г.
- ^ Сотрудники Университета Хаддерсфилда (16 сентября 2015 г.). «Трупные собаки находят подводные трупы» . www.forensicmag.com . Архивировано из оригинала 11 сентября 2017 года . Проверено 11 сентября 2017 г.
- ^ «Исследования показывают ценность трупных собак для поиска трупов под водой» . Новости Университета Хаддерсфилда . 10 сентября 2015 года. Архивировано из оригинала 11 сентября 2017 года . Проверено 11 сентября 2017 г.
Внешние ссылки
[ редактировать ]![]() СМИ, связанные с подводными поисками на Викискладе?
СМИ, связанные с подводными поисками на Викискладе?