Дистанционно управляемый подводный аппарат

Дистанционно управляемый подводный аппарат (РОУВ) [ нужна ссылка ] или дистанционно управляемый аппарат (ROV) — это свободно плавающий подводный аппарат, используемый для выполнения подводного наблюдения, проверки и физических задач, таких как работа клапанов, гидравлические функции и другие общие задачи в подводной нефтегазовой промышленности, военных, научных и других приложениях. ROV также могут нести наборы инструментов для выполнения конкретных задач, таких как втягивание и соединение гибких выкидных линий и шлангокабелей, а также замена компонентов. [ 1 ]
Этот раздел необходимо расширить : охватить все остальные приложения. Вы можете помочь, добавив к нему . ( январь 2024 г. ) |
Описание
[ редактировать ]Это значение отличается от транспортных средств с дистанционным управлением, работающих на земле или в воздухе. [ нужны разъяснения ] ROV являются незанятыми, обычно очень маневренными и управляются экипажем либо на борту судна/плавучей платформы, либо на близлежащей суше. Они распространены в глубоководных отраслях, таких как морская добыча углеводородов. Обычно, но не обязательно, они связаны с принимающим кораблем нейтрально плавучим тросом или несущий груз шлангокабель , часто при работе в суровых условиях или на большей глубине, вместе с системой управления тросом (TMS) используется . TMS представляет собой либо устройство типа гаража, которое содержит ROV во время спуска через зону заплеска , либо, на более крупных ROV рабочего класса, отдельный узел, установленный наверху ROV. Целью TMS является удлинение и укорачивание троса, чтобы свести к минимуму эффект сопротивления кабеля при наличии подводных течений. Пупочный кабель представляет собой бронированный кабель, содержащий группу электрических проводников и оптоволоконных кабелей, по которым передается электроэнергия, видео и сигналы данных между оператором и TMS. При использовании TMS затем передает сигналы и питание для ROV по привязному кабелю. Попав в ТНУ, электроэнергия распределяется между компонентами ТНУ. Однако в приложениях с высокой мощностью большая часть электроэнергии приводит в движение мощный электродвигатель, который приводит в движение гидравлический насос . Затем насос используется для приведения в движение и для приведения в действие оборудования, такого как динамометрические инструменты и манипуляторы, где электродвигатели было бы слишком сложно установить под водой. Большинство ROV оснащены как минимум видеокамерой и освещением. Дополнительное оборудование обычно добавляется для расширения возможностей автомобиля. К ним могут относиться гидролокаторы , магнитометры , фотоаппараты, манипуляторы или режущие рычаги, пробоотборники воды и инструменты, измеряющие прозрачность воды, температуру воды, плотность воды, скорость звука, проникновение света и температуру. [ 2 ]
Терминология
[ редактировать ]В сфере профессионального дайвинга и морских контрактов используется термин «дистанционно управляемый аппарат» (ROV). [ 3 ] [ 4 ] [ 5 ] [ 1 ]
Классификация
[ редактировать ]Погружные ROV обычно подразделяются на категории в зависимости от их размера, веса, возможностей или мощности. Некоторые распространенные рейтинги:
- Микро - обычно ROV класса Микро очень малы по размеру и весу. Сегодняшние ROV Micro-Class могут весить менее 3 кг. Эти ROV используются в качестве альтернативы дайверу, особенно в местах, куда дайвер не может физически войти, например, в канализацию, трубопровод или небольшую полость.
- Мини - обычно ROV Мини-класса весят около 15 кг. ROV Мини-класса также используются в качестве альтернативы дайверам. Один человек может перевезти всю систему ROV с собой на небольшой лодке, развернуть ее и выполнить работу без посторонней помощи. Некоторые классы Micro и Mini называются классами «глазного яблока», чтобы отличать их от ROV, которые могут выполнять задачи вмешательства.
- Общие - обычно менее 5 л.с. (движительная установка); иногда устанавливались небольшие трехпальцевые захваты-манипуляторы, например, на самом раннем RCV 225. Эти ROV могут нести гидролокатор и обычно используются для легких съемок. Обычно максимальная рабочая глубина составляет менее 1000 метров, хотя были разработаны разработки для глубины до 7000 метров.
- Инспекционный класс - это, как правило, прочные ROV для коммерческого или промышленного использования и сбора данных, обычно оснащенные видео в реальном времени, фотосъемкой, гидролокатором и другими датчиками сбора данных. ROV инспекционного класса также могут иметь манипуляторы для легкой работы и манипулирования объектами.
- Легкий рабочий класс - обычно менее 50 л.с. (силовая установка). Эти ROV могут нести некоторые манипуляторы. Их шасси может быть изготовлено из полимеров, таких как полиэтилен, а не из обычной нержавеющей стали или алюминиевых сплавов. Обычно они имеют максимальную рабочую глубину менее 2000 м.
- Тяжелый рабочий класс - обычно менее 220 л.с. (движительная установка) с возможностью нести как минимум два манипулятора. Они имеют рабочую глубину до 3500 м.
- Прокладка траншей и захоронение - обычно более 200 л.с. (движительная установка) и обычно не более 500 л.с. (хотя некоторые и превышают это значение) с возможностью нести сани для укладки кабеля и работать на глубинах до 6000 м в некоторых случаях.
Погружаемые ROV могут находиться в «свободном плавании», когда они работают с нейтральной плавучестью на тросе от корабля-носителя или платформы, или они могут находиться в «гараже», когда они работают из погружного «гаража» или «цилиндра» на тросе, прикрепленном к тяжелому гараж, спускаемый с корабля или платформы. Оба метода имеют свои плюсы и минусы; [ нужны разъяснения ] однако очень глубокие работы обычно выполняются в гараже. [ 6 ]
История
[ редактировать ]
В 1970-х и 80-х годах Королевский флот использовал подводную лодку с дистанционным управлением «Котлет» для подъема учебных торпед и мин. RCA (Noise) поддерживала систему «Котлет 02», базирующуюся на полигонах BUTEC, в то время как система «03» базировалась на базе подводных лодок на Клайде и управлялась и обслуживалась персоналом RN.
ВМС США профинансировали большую часть ранних разработок технологии ROV в 1960-х годах, создавшей то, что тогда называлось «Подводное спасательное средство с кабельным управлением» (CURV). Это создало возможность проводить глубоководные спасательные операции и восстанавливать объекты со дна океана, такие как ядерная бомба, потерянная в Средиземном море после крушения Palomares B-52 в 1966 году . Опираясь на эту технологическую базу; морская нефтегазовая промышленность создала ROV рабочего класса для помощи в разработке морских нефтяных месторождений. Спустя более десяти лет после того, как они были впервые представлены, ROV стали незаменимыми в 1980-х годах, когда большая часть новых морских разработок вышла за рамки досягаемости дайверов-людей. В середине 1980-х годов индустрия морских подводных аппаратов переживала серьезный застой в технологическом развитии, частично вызванный падением цен на нефть и глобальным экономическим спадом. С тех пор технологическое развитие в индустрии ROV ускорилось, и сегодня ROV выполняют множество задач во многих областях. Их задачи варьируются от простой проверки подводные сооружения, трубопроводы и платформы для соединения трубопроводов и размещения подводных манифольдов. Они широко используются как при первоначальном строительстве подводных сооружений, так и при последующем ремонте и техническом обслуживании. [ 7 ] Нефтяная и газовая промышленность вышла за рамки использования ROV рабочего класса и превратилась в мини-ROV, которые могут быть более полезны на мелководье. Они меньше по размеру, что часто позволяет снизить затраты и ускорить развертывание. [ 8 ]
Погружаемые ROV использовались для идентификации многих исторических кораблекрушений, в том числе RMS Titanic , Bismarck , USS Yorktown , SM U-111 и SS Central America . В некоторых случаях, например, на Титанике и SS Central America , ROV использовались для сбора материала с морского дна и доставки его на поверхность. [ 9 ] [ 10 ]
Хотя большая часть ROV используется в нефтегазовой отрасли, другие области применения включают науку, военное дело и спасательные работы. Военные используют ROV для таких задач, как разминирование и инспекция. Научное использование обсуждается ниже.
Строительство
[ редактировать ]ROV рабочего класса имеют большой плавучий пакет на алюминиевом шасси , обеспечивающий необходимую плавучесть для выполнения различных задач. Сложность конструкции алюминиевой рамы варьируется в зависимости от конструкции производителя. синтаксическую пену В качестве флотационного материала часто используют . В нижней части системы может быть установлен инструментальный блок для размещения различных датчиков или пакетов инструментов. Размещая легкие компоненты сверху, а тяжелые - снизу, вся система имеет большое расстояние между центром плавучести и центром тяжести : это обеспечивает стабильность и жесткость для выполнения работ под водой. Подруливающие устройства расположены между центром плавучести и центром тяжести для поддержания устойчивости робота при маневрах. Различные конфигурации подруливающих устройств и алгоритмы управления могут использоваться для обеспечения надлежащего контроля положения и ориентации во время операций, особенно в водах с сильным течением. Подруливающие устройства обычно имеют сбалансированную векторную конфигурацию, чтобы обеспечить максимально точное управление.
Электрические компоненты могут находиться в маслонаполненных водонепроницаемых отсеках или отсеках с одной атмосферой, чтобы защитить их от коррозии в морской воде и разрушения из-за чрезмерного давления, оказываемого на ROV во время работы на глубине. ROV будет оснащен двигателями, камерами , фонарями, тросом, рамой и органами управления пилотом для выполнения основных работ. [ 11 ] Дополнительные датчики, такие как манипуляторы и гидролокаторы, могут быть установлены по мере необходимости для конкретных задач. [ 12 ] Обычно можно встретить ROV с двумя роботизированными руками; каждый манипулятор может иметь разные захватные губки. Камеры также могут быть ограждены для защиты от столкновений.
Большинство ROV рабочего класса построены, как описано выше; однако это не единственный стиль в методе строительства ROV. Меньшие по размеру ROV могут иметь самую разную конструкцию, каждая из которых соответствует своей предполагаемой задаче. Более крупные ROV обычно развертываются и управляются с судов, поэтому ROV может иметь посадочные полозья для подъема на палубу.
Конфигурации
[ редактировать ]Транспортные средства с дистанционным управлением имеют три основные конфигурации. Каждый из этих факторов налагает определенные ограничения.
- ТПА с открытой или коробчатой рамой — это наиболее известная из конфигураций ТПА, состоящая из открытой рамы, в которой заключены все рабочие датчики, подруливающие устройства и механические компоненты. Они полезны для свободного плавания при слабом течении (менее 4 узлов согласно спецификациям производителя). Они не подходят для буксируемого применения из-за очень плохой гидродинамической конструкции. Большинство ROV рабочего и тяжелого рабочего класса основаны на этой конфигурации. [ 13 ]
- ROV в форме торпеды - это обычная конфигурация для ROV класса сбора данных или инспекции. Форма торпеды обеспечивает низкое гидродинамическое сопротивление, но имеет значительные ограничения в управлении. Форма торпеды требует высокой скорости (именно поэтому эта форма используется для военных боеприпасов), чтобы оставаться стабильной в позиционном и позиционном отношении, но этот тип очень уязвим на высокой скорости. На малых скоростях (0–4 узла) возникают многочисленные нестабильности, такие как крен и тангаж, вызванный тросом, крен, крен и рысканье, вызванный течением. Он имеет ограниченные поверхности управления в хвостовой части или корме, что легко вызывает чрезмерную нестабильность компенсации. Их часто называют «Tow Fish», поскольку они чаще используются в качестве буксируемых ROV. [ 13 ]
Управление Tether
[ редактировать ]ROV требует троса или шлангокабеля (в отличие от AUV) для передачи энергии и данных между транспортным средством и поверхностью. Следует учитывать размер и вес троса: слишком большой трос отрицательно повлияет на лобовое сопротивление транспортного средства, а слишком маленький может оказаться недостаточно прочным для подъема во время запуска и подъема.
Трос обычно наматывается на систему управления тросом (TMS), которая помогает управлять тросом так, чтобы он не запутывался и не завязывался. В некоторых ситуациях его можно использовать в качестве лебедки для опускания или подъема автомобиля. [ 14 ]
Приложения
[ редактировать ]Опрос
[ редактировать ]ROV для обследования или инспекции обычно меньше, чем ROV рабочего класса, и их часто подразделяют на Класс I: только наблюдение или Класс II Наблюдение с полезной нагрузкой. [ 15 ] Они используются для облегчения гидрографических исследований, т. е. определения местоположения подводных сооружений, а также для инспекционных работ, например, при обследовании трубопроводов, осмотре кожухов и осмотре морских корпусов судов. Обзорные ROV (также известные как «глазные яблоки»), хотя и меньше, чем рабочий класс, часто имеют сопоставимые характеристики с точки зрения способности удерживать позицию в течениях и часто несут аналогичные инструменты и оборудование - освещение, камеры, гидролокаторы, сверхкороткую базовую линию ( USBL) маяк, рамановский спектрометр , [ 16 ] и стробоскоп в зависимости от грузоподъемности автомобиля и потребностей пользователя.
Сопровождение водолазных работ
[ редактировать ]Этот раздел нуждается в расширении . Вы можете помочь, добавив к нему . ( февраль 2021 г. ) |
По соображениям безопасности операции ROV в сочетании с одновременными водолазными операциями находятся под общим контролем руководителя водолазных работ. [ 3 ]
Международная ассоциация морских подрядчиков (IMCA) опубликовала рекомендации по эксплуатации ROV на море в совместных операциях с водолазами в документе « Вмешательство с дистанционным управлением во время водолазных операций» (IMCA D 054, IMCA R 020), предназначенном для использования как подрядчиками, так и клиентами. [ 17 ]
Военный
[ редактировать ]ROV использовались несколькими военно-морскими силами на протяжении десятилетий, в основном для поиска мин и подрыва мин.

В октябре 2008 года ВМС США начали совершенствовать свои локально пилотируемые спасательные системы, основанные на Mystic DSRV и кораблях поддержки, с помощью модульной системы SRDRS, основанной на привязном пилотируемом ROV, называемом спасательным модулем под давлением (PRM). За этим последовали годы испытаний и учений с подводными лодками флотов нескольких стран. [ 18 ] Он также использует беспилотный подводный аппарат «Сибицкий» для обследования вышедших из строя подводных лодок и подготовки подводной лодки к ПРМ.
ВМС США также используют ROV под названием AN/SLQ-48 Min Neutralization Vehicle (MNV) для ведения минной войны. Благодаря соединительному кабелю он может отходить от корабля на 1000 ярдов (910 м) и достигать глубины 2000 футов (610 м). Пакеты миссий, доступные для MNV, известны как MP1, MP2 и MP3. [ 19 ]
- MP1 — это кабельный резак для вскрытия заякоренной шахты с целью ее эвакуации или обезвреживания взрывоопасных боеприпасов (EOD).
- MP2 представляет собой бомбу весом 75 фунтов (34 кг) взрывчатого вещества на полимерной связке PBXN-103 фугасного для нейтрализации донных/наземных мин.
- MP3 представляет собой заякоренный минный тросовый захват и поплавок с комбинацией бомб MP2 для нейтрализации заякоренных мин под водой.
Заряды взрываются по акустическому сигналу корабля.
предназначен Автономный беспилотный подводный аппарат (НПА) AN/BLQ-11 для скрытного противоминного противодействия и может запускаться с некоторых подводных лодок. [ 20 ]
ROV ВМС США есть только на кораблях противоминной защиты класса Avenger . После остановки на мель USS Guardian (MCM-5) и вывода из эксплуатации USS Avenger (MCM-1) и USS Defender (MCM-2) , в прибрежных водах Бахрейна продолжают работать только 11 американских тральщиков ( USS Sentry (MCM-3) ) , USS Devastator (MCM-6) , USS Gladiator (MCM-11) и USS Dextrous (MCM-13) ), Япония ( USS Patriot (MCM-7) , USS Pioneer (MCM-9) , USS Warrior (MCM- 10) и USS Chief (MCM-14) ), и Калифорния ( USS Champion (MCM-4) , USS Scout (MCM-8) и USS Ardent (MCM-12) ). [ 21 ]
19 августа 2011 года роботизированная подводная лодка производства Boeing , получившая название Echo Ranger, проходила испытания на предмет возможного использования военными США для наблюдения за водами противника, патрулирования местных гаваней на предмет угроз национальной безопасности и обыскивания дна океанов для обнаружения опасностей для окружающей среды. [ 22 ] ВМС Норвегии осмотрели корабль Helge Ingstad норвежским подводным дроном Blueye Pioneer. [ 23 ]
По мере того, как их возможности растут, меньшие ROV также все чаще принимаются на вооружение военно-морских сил, береговой охраны и портовых властей по всему миру, включая Береговую охрану США и ВМС США, Королевский флот Нидерландов, ВМС Норвегии, Королевский флот и Пограничную охрану Саудовской Аравии. . Они также получили широкое распространение в полицейских управлениях и поисково-спасательных группах. Полезно для различных задач подводной инспекции, таких как обезвреживание взрывоопасных боеприпасов (EOD), метеорология, безопасность портов, противоминная защита (MCM), а также морская разведка, наблюдение и рекогносцировка (ISR). [ 24 ]
Наука
[ редактировать ]

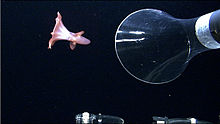
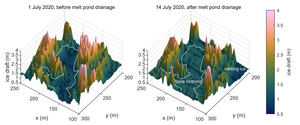
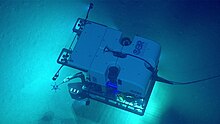
ROV также широко используются научным сообществом для изучения океана. Ряд глубоководных животных и растений был обнаружен или изучен в их естественной среде с помощью ROV; примеры включают медузу Stellamedusa ventana и угреобразных галозавров . В США передовые работы проводятся в нескольких государственных и частных океанографических учреждениях, в том числе в Научно-исследовательском институте аквариумов Монтерей-Бэй (MBARI), Океанографическом институте Вудс-Хоула (WHOI) (совместно с Nereus ) и Университете Род-Айленда / Институте. для разведки (URI/IFE). [ 25 ] [ 26 ] В Европе Институт Альфреда Вегенера использует ROV для арктических и антарктических исследований морского льда, включая измерение осадки льда, [ 27 ] светопропускание, [ 28 ] отложения, кислород, нитраты, температура морской воды и соленость. Для этих целей он оснащен одно- и многолучевым гидролокатором, спектрорадиометром , манипулятором, флуорометром , кондуктометром/температурой/глубиной (измерением солености) (CTD), оптодом и УФ-спектрометром. [ 29 ]
Научные ROV имеют множество форм и размеров. Поскольку качественная видеосъемка является ключевым компонентом большинства глубоководных научных исследований, исследовательские ROV, как правило, оснащаются мощными системами освещения и камерами вещательного качества. [ 30 ] В зависимости от проводимых исследований научный ROV будет оснащен различными устройствами для отбора проб и датчиками. Многие из этих устройств представляют собой уникальные, современные экспериментальные компоненты, предназначенные для работы в экстремальных условиях глубокого океана. Научные ROV также включают в себя множество технологий, разработанных для коммерческого сектора ROV, таких как гидравлические манипуляторы и высокоточные подводные навигационные системы. Они также используются для проектов подводной археологии, таких как проект кораблекрушения Марди Гра в Мексиканском заливе. [ 31 ] [ 32 ] и проект CoMAS [ 33 ] в Средиземном море. [ 34 ]
Существует несколько более крупных систем высокого класса, которые отличаются своими возможностями и приложениями. компании MBARI Разработка автомобиля Tiburon обошлась более чем в 6 миллионов долларов США и используется в основном для средневодных и гидротермальных исследований на западном побережье США. [ 35 ] компании WHOI Система Джейсон внесла значительный вклад в глубоководные океанографические исследования и продолжает работать по всему миру. компании URI/IFE ROV Hercules является одним из первых научных ROV, полностью оснащенных гидравлической двигательной установкой и уникальным оснащением для исследования и раскопок затонувших древних и современных кораблей. канадского научного погружного комплекса Система ROPOS постоянно используется несколькими ведущими институтами и университетами океанических наук для решения сложных задач, таких как восстановление и исследование глубоководных жерл, а также обслуживание и развертывание океанских обсерваторий. [ 36 ]
Образовательная деятельность
[ редактировать ]Образовательная программа SeaPerch « Подводный подводный аппарат с дистанционным управлением» (ROV) представляет собой образовательный инструмент и комплект, который позволяет учащимся начальной, средней и старшей школы сконструировать простой подводный аппарат с дистанционным управлением из труб из поливинилхлорида (ПВХ) и других готовых материалов. . Программа SeaPerch обучает студентов базовым навыкам проектирования кораблей и подводных лодок и побуждает их изучать военно-морскую архитектуру , а также концепции морской и океанской инженерии . SeaPerch спонсируется Управлением военно-морских исследований в рамках Национальной военно-морской ответственности за военно-морскую технику (NNNRNE), а программа управляется Обществом военно-морских архитекторов и морских инженеров . [ 37 ]
Еще одно инновационное использование технологии ROV было во время проекта кораблекрушения Марди Гра . Кораблекрушение «Марди Гра» затонуло около 200 лет назад примерно в 35 милях от побережья Луизианы в Мексиканском заливе на глубине 4000 футов (1200 метров). Кораблекрушение, настоящая личность которого остается загадкой, лежало забытым на дне моря до тех пор, пока в 2002 году его не обнаружила нефтепромысловая инспекционная бригада, работающая на газосборную компанию «Океанос» (ОГГК). В мае 2007 года была начата экспедиция, возглавляемая Техасским университетом A&M и финансируемая OGGC в соответствии с соглашением со Службой управления минеральными ресурсами (ныне BOEM ), с целью проведения самых глубоких научных археологических раскопок, когда-либо предпринятых в то время, для изучения этого места на морском дне. и восстановить артефакты для возможного публичного показа в Государственном музее Луизианы . В рамках образовательной программы Nautilus Productions в партнерстве с BOEM , Техасским университетом A&M, Сетью общественной археологии Флориды . [ 38 ] и Veolia Environmental сняли часовой документальный фильм в формате HD. [ 39 ] о проекте, короткие видеоролики для всеобщего просмотра и предоставленные видеообновления во время экспедиции. [ 40 ] Видеоматериалы с ROV были неотъемлемой частью этой работы и широко использовались в документальном фильме «Тайна кораблекрушения Марди Гра» . [ 41 ]
Центр обучения передовым морским технологиям (MATE) использует ROV для обучения студентов средних и старших классов, колледжей и университетов карьере, связанной с океаном, и помогает им улучшить свои научные, технологические, инженерные и математические навыки. Ежегодные студенческие соревнования ROV, проводимые MATE, бросают вызов студенческим командам со всего мира, чтобы соревноваться с ROV, которые они проектируют и строят. В конкурсе используются реалистичные миссии на базе ROV, которые имитируют высокопроизводительную рабочую среду, уделяя особое внимание другой теме, которая знакомит студентов со многими различными аспектами технических навыков и профессий, связанных с морской деятельностью. Соревнования ROV организуются MATE и комитетом ROV Общества морских технологий и финансируются такими организациями, как Национальное управление по аэронавтике и исследованию космического пространства (НАСА), Национальное управление океанических и атмосферных исследований (NOAA) и Oceaneering , а также многими другими организациями, которые признают ценность высококвалифицированных студентов с технологическими навыками, такими как проектирование, проектирование и пилотирование ROV. МАТЕ было создано при финансовой поддержке Национальный научный фонд со штаб-квартирой в колледже полуострова Монтерей в Монтерее, Калифорния . [ 42 ]
Список научных ROV
[ редактировать ]
| Имя ДУА | Оператор | Лет в эксплуатации |
|---|---|---|
| Джейсон | КТОИ | 1988 – настоящее время [ 43 ] |
| ВИКТОР | ФОФ | 2002 – настоящее время [ 44 ] |
| Нерей | КТОИ | 2009–2014 [ 45 ] |
| ИГИЛ | Национальный океанографический центр | 2006 – настоящее время [ 46 ] |
| СуБастиан | Океанический институт Шмидта | 2016 – настоящее время [ 47 ] |
| ROV Тибурон | УДАЧИ | 1996–2008 [ 48 ] |
| ROV Ventana | УДАЧИ | 1988 – настоящее время [ 49 ] [ 50 ] |
| ROV Док Рикеттс | УДАЧИ | 2009 – настоящее время [ 51 ] [ 52 ] |
| Лулукай | Гавайский университет в Маноа | 2013 – настоящее время [ 53 ] |
| V8 Оффшор | Университет Гетеборга | 2011 – настоящее время [ 54 ] |
| ТПА «Геркулес» | Фонд исследования живого океана Наутилус | 2003 – настоящее время [ 55 ] |
| Эгир6000 | УиБ | 2015 – настоящее время [ 56 ] |
| ROV Как | ГЕОМАР | 2007 – настоящее время [ 57 ] |
| Глубокий первооткрыватель | Глобальный фонд исследования океана | 2013 – настоящее время [ 58 ] [ 59 ] |
| Кайко | ГАРАНТИЯ | 1993–2003 [ 60 ] |
| БЕЗДНА | ГАРАНТИЯ | 2007 – настоящее время [ 61 ] |
| РОПОС | Канадская научная установка по погружению | 1986 – настоящее время [ 62 ] |
| АВРОРА | REV Океан | 2021 – настоящее время [ 63 ] |
| МАРУМ-КВЕСТ | МАРУМ | 2003 – настоящее время [ 64 ] |
| КАЛЬМАРТЫ | МАРУМ | 2015 – настоящее время [ 65 ] |
| ИГИЛ | Университет Саутгемптона | 2003 – настоящее время [ 66 ] |
СМИ
[ редактировать ]
По мере того, как камеры и датчики развивались, а транспортные средства становились более маневренными и простыми в управлении, ROV стали особенно популярны среди кинематографистов-документалистов из-за их способности получать доступ к глубоким, опасным и замкнутым областям, недоступным для дайверов. Нет ограничений на то, как долго ROV может находиться под водой и снимать кадры, что позволяет получить ранее невиданные перспективы. [ 67 ] ROV использовались при съемках нескольких документальных фильмов, в том числе «Люди-акулы» Nat Geo и «Темные тайны Лузитании » , а также « Специальный шпион BBC по дикой природе в толпе». [ 68 ]
Благодаря широкому использованию военными, правоохранительными органами и службами береговой охраны, ROV также фигурируют в криминальных драмах, таких как популярный CBS сериал CSI .
Хобби
[ редактировать ]Благодаря возросшему интересу к океану со стороны многих людей, как молодых, так и пожилых, а также увеличению доступности некогда дорогого и некоммерчески доступного оборудования, ROV стали популярным хобби среди многих. Это хобби включает в себя строительство небольших ROV, которые обычно изготавливаются из труб из ПВХ и часто могут погружаться на глубину от 50 до 100 футов, но некоторым удается достичь глубины 300 футов.
STEM-образование
[ редактировать ]Этот новый интерес к ROV привел к созданию множества соревнований, в том числе MATE (Образование в области передовых морских технологий), NURC (Национальный конкурс подводной робототехники) и RoboSub . [ 69 ] Это соревнования, в которых участники, чаще всего школы и другие организации, соревнуются друг с другом в ряде задач, используя построенные ими ROV. [ 70 ] Большинство любительских ROV тестируются в бассейнах и озерах со спокойной водой, однако некоторые тестируют свои собственные ROV в море. Однако это создает множество трудностей из-за волн и течений, которые могут привести к тому, что ROV отклонится от курса или будет с трудом преодолевать прибой из-за небольшого размера двигателей, которые установлены на большинстве любительских ROV. [ 71 ]
См. также
[ редактировать ]- Автономный подводный аппарат - Беспилотный подводный аппарат с автономной системой наведения.
- Echo Ranger - морской автономный подводный аппарат, построенный компанией Boeing.
- Eelume – автономный подводный аппарат для осмотра, обслуживания и ремонта.
- Global Explorer ROV - дистанционно управляемый аппарат для глубоководных исследований и исследований.
- Helix Energy Solutions Group – Поставщик морских услуг и операций на ROV
- Нерей (подводный аппарат) - гибридный дистанционно управляемый или автономный подводный аппарат.
- PantheROV - Центр исследования пресной воды Университета Висконсина. Системные
- Скорпион ROV - подводный аппарат с дистанционным управлением рабочего класса.
- Подводные (технологии) – Технология подводных операций в море.
- Система подводного акустического позиционирования - Система слежения и навигации подводных аппаратов или водолазов с использованием акустических сигналов.
- Конвенция ЮНЕСКО об охране подводного культурного наследия – Договор, принятый 2 ноября 2001 г.
- УРОВ VideoRay – серия дистанционно управляемых подводных аппаратов досмотрового класса.
- Роботизированный неразрушающий контроль . Метод контроля с использованием инструментов с дистанционным управлением.
- Радиоуправляемая подводная лодка с радиоуправлением.
Ссылки
[ редактировать ]- ^ Перейти обратно: а б «ISO 13628-8:2002: Нефтяная и газовая промышленность. Проектирование и эксплуатация подводных систем добычи. Часть 8. Интерфейсы дистанционно управляемых транспортных средств (ROV) с подводными системами добычи» . ИСО . Проверено 19 февраля 2023 г.
- ^ «Конструкция и функционирование дистанционно управляемых транспортных средств» . Морское О. Архивировано из оригинала 1 июля 2016 года . Проверено 4 июня 2016 г.
- ^ Перейти обратно: а б Персонал (февраль 2014 г.). Международный кодекс практики IMCA для дайвинга в открытом море . Лондон: Международная ассоциация морских подрядчиков.
{{cite book}}:|work=игнорируется ( помогите ) - ^ Правила дайвинга 2009 года . Претория: Правительственная типография. Архивировано из оригинала 4 ноября 2016 г. Получено 16 марта 2019 г. - через Южноафриканский институт правовой информации.
{{cite book}}:|work=игнорируется ( помогите ) - ^ «IMCA C 005: Руководство по обеспечению и оценке компетентности: Дистанционные системы и отдел ROV» (3-е изд.). Международная ассоциация морских подрядчиков . Январь 2011 года . Проверено 16 марта 2019 г.
- ^ «Категории ROV – Краткое описание» . Комитет по дистанционно управляемым транспортным средствам . Архивировано из оригинала 17 сентября 2016 года . Проверено 4 июня 2016 г.
- ^ «Какие Ровы» . Кмекс Групп . Проверено 4 июня 2016 г.
- ^ дел, политика Chevron, правительство и общественность. «Мини ROV производит фурор в подводных инспекциях» . chevron.com . Проверено 12 января 2024 г.
{{cite web}}:|first=имеет общее имя ( справка ) CS1 maint: несколько имен: список авторов ( ссылка ) - ^ «Корабли и технологии, использовавшиеся во время экспедиций на Титанике» . Океанографический институт Вудс-Хоул . Проверено 4 июня 2016 г.
- ^ @NatGeoUK (30 сентября 2022 г.). «Эксклюзив: у берегов Вирджинии обнаружены обломки легендарной немецкой подводной лодки времен Первой мировой войны» . Нэшнл Географик . Проверено 11 января 2024 г.
- ^ «Что такое подводный ROV?» . Синяя робототехника . Проверено 12 января 2024 г.
- ^ «Что такое подводные ROV и как они используются?» . www.reachrobotics.com . 08.10.2021 . Проверено 29 марта 2023 г.
- ^ Перейти обратно: а б «Комитет по дистанционно управляемым транспортным средствам Общества морских технологий» . rov.org . Проверено 10 октября 2017 г.
- ^ Бай, Ён (2019). Справочник по подводной инженерии (второе изд.). Эльзевир Наука. ISBN 978-0-12-812622-6 .
- ^ Персонал (7 августа 2015 г.). «Мировая статистика по ROV за 2014 год» . ИМКА . Проверено 18 августа 2016 г.
- ^ Тиг, Джонатан; Мегсон-Смит, Дэвид; Вербелен, Янник; Скотт, Томас (6 марта 2022 г.). «Подводные спектроскопические методы определения характеристик ядерных отходов на месте» . Материалы WM2022 . Управление ядерными отходами (WM2022). Финикс, Аризона.
- ^ «IMCA выпускает руководство для ROV во время водолазных работ» . www.offshore-energy.biz . Оффшорная энергетика. 2 февраля 2015 года . Проверено 10 февраля 2021 г.
- ^ Тарантола, Эндрю (11 октября 2012 г.). «Этот ROV погружается на 2000 футов, чтобы спасти моряков с затонувшей подводной лодки» . Гизмодо . Проверено 4 июня 2016 г.
- ^ «AN/SLQ-48 — Машина обезвреживания мин» . ФАС . Проверено 4 июня 2016 г.
- ^ «Автономный беспилотный подводный аппарат AN/BLQ-11» . Военно-морские дроны . Проверено 4 июня 2016 г.
- ^ Дэн Петти. «ВМС США - Подборка фактов: Корабли противоминной защиты - MCM» . Проверено 25 мая 2015 г.
- ^ Хенниган, WJ (19 августа 2011 г.). «Компания Boeing испытывает подводный беспилотник у острова Санта-Каталина» . Лос-Анджелес Таймс . Проверено 25 мая 2015 г.
- ^ Blueye Robotics (19 декабря 2018 г.), ВМС Норвегии пилотируют подводный дрон Blueye Pioneer | Фрегат Helge Ingstad , получено 25 февраля 2019 г.
- ^ «Blueprint Lab и VideoRay в партнерстве для создания нового инструмента EOD для ВМС США» . ОНТ . Океанские новости. 23 марта 2020 г. Проверено 14 мая 2020 г.
- ^ Х.Г. Грин; ДС Стейкс; ДЛ Оранжевый; Дж. П. Барри; Б. Х. Робисон (1993). «Применение дистанционно управляемого аппарата для геологического картирования залива Монтерей, Калифорния, США» . Гейне и Крейн (ред.). Погружение в науку...1993 . Труды Американской академии подводных наук (13-й ежегодный научный симпозиум по дайвингу). Архивировано из оригинала 13 марта 2009 года . Проверено 11 июля 2008 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ К. Харрольд, К. Лайт и С. Лисин. (1993). «Распределение, численность и использование дрейфующих макрофитов в системе прибрежных подводных каньонов» . В: Гейне и Крейн (ред.). Погружение в науку...1993 . Труды Американской академии подводных наук (13-й ежегодный симпозиум по научному дайвингу). Архивировано из оригинала 13 марта 2009 года . Проверено 11 июля 2008 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Салганик, Евгений; Кэтлейн, Кристиан; Ланге, Бенджамин А.; Матеро, Илкка; Лей, Руибо; Фонг, Эллисон А.; Фонс, Стивен В.; Божественный, Дмитрий; Оггье, Марк; Кастеллани, Джулия; Боззато, Дебора; Чемберлен, Эмилия Дж.; Хоппе, Клара Дж. М.; Мюллер, Оливер; Гарднер, Джесси; Ринке, Аннетт; Перейра, Патрик Саймонс; Ульфсбо, Адам; Марсей, Крис; Вебстер, Мелинда А.; Маус, Зёнке; Хайленд, Кнут В.; Гранског, Матс А. (2023). «Временная эволюция подледных слоев талой воды и ложного дна и их влияние на баланс массы летнего арктического морского льда» . Элементы: Наука об антропоцене . 11 (1). Издательство Калифорнийского университета: 00035. Бибкод : 2023EleSA..11...35S . дои : 10.1525/element.2022.00035 . HDL : 10037/30456 . ISSN 2325-1026 . S2CID 257937347 .
- ^ Анхаус, Филипп; Кэтлейн, Кристиан; Николаус, Марсель; Арндт, Стефани; Ютила, Артту; Хаас, Кристиан (17 декабря 2021 г.). «Определение глубины снежного покрова на арктическом морском льду с использованием подледных гиперспектральных измерений радиации» . Границы в науках о Земле . 9 . Frontiers Media SA: 1174. Бибкод : 2021FrEaS...9.1174A . дои : 10.3389/feart.2021.711306 . ISSN 2296-6463 .
- ^ Кэтлейн, Кристиан; Шиллер, Мартин; Белтер, Ханс Дж.; Копполаро, Вероника; Венсландт, Дэвид; Николаус, Марсель (04 сентября 2017 г.). «Новая дистанционно управляемая сенсорная платформа для междисциплинарных наблюдений подо льдом» . Границы морской науки . 4 . Фронтирс Медиа С.А. дои : 10.3389/fmars.2017.00281 . hdl : 10013/epic.51540.d001 . ISSN 2296-7745 .
- ^ Рид Дж.К., Кениг CC, Шепард А.Н., Гилмор-младший Р.Г. (2007). «Долгосрочный мониторинг глубоководных коралловых рифов: последствия донного траления» . В: Н. В. Поллок, Дж. М. Годфри (ред.) «Погружение в науку… 2007» . Труды Американской академии подводных наук (Двадцать шестой ежегодный научный симпозиум по дайвингу). Архивировано из оригинала 22 ноября 2008 года . Проверено 11 июля 2008 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «Проекты, Марди Гра» . Сеть общественной археологии Флориды . Университет Западной Флориды. Архивировано из оригинала 9 ноября 2017 года . Проверено 8 ноября 2017 г.
- ^ «Проект Марди Гра» . Центр морской археологии и охраны природы .
- ^ Бруно, Ф.; и др. (2016). «Проект CoMAS: новые материалы и инструменты для улучшения натурной документации, реставрации и консервации подводных археологических находок». Журнал Общества морских технологий . 50 (4): 108–118. дои : 10.4031/MTSJ.50.4.2 .
- ^ ROV для обеспечения планового обслуживания подводных археологических объектов . MTS/IEEE OCEANS 2015 – Генуя: открытие устойчивой энергии океана для нового мира. doi : 10.1109/OCEANS-Genova.2015.7271602 .
- ^ Т.М. Шэнк, Д.Д. Форнари, М. Эдвардс, Р. Хеймон, М. Лилли, К. Фон Дамм и Р. А. Лутц . (1994). «Быстрое развитие структуры биологического сообщества и связанных с ним геологических особенностей гидротермальных источников на 9-10 северной широты восточно-тихоокеанского поднятия» . В: М. ДеЛука (Ред). Погружение в науку...1994 . Труды Американской академии подводных наук (14-й ежегодный симпозиум по научному дайвингу). Архивировано из оригинала 13 марта 2009 года . Проверено 11 июля 2008 г.
{{cite journal}}: CS1 maint: несколько имен: список авторов ( ссылка ) CS1 maint: неподходящий URL ( ссылка ) - ^ «РОПОС — Канадский научный погружной комплекс» . Ропос . Проверено 4 июня 2016 г.
- ^ "seaperch.org :: Официальный сайт SeaPerch" . Проверено 25 мая 2015 г.
- ^ «Дом ФПАН» . Общественная археология Флориды .
- ^ Лэндис, Номи (2008). «Тайна кораблекрушения Марди Гра» . Наутилус Продакшнс .
- ^ Фолк, Кимберли Л; Аллен, Рик (сентябрь 2017 г.). «Свет, камера… Кораблекрушение!?! Мультимедиа на высоте четырех тысяч футов». Историческая археология . 51 (3): 418–424. дои : 10.1007/s41636-017-0051-1 . S2CID 164446605 .
- ^ Опдайк, Марк (2007). «Тайна документального фильма о кораблекрушении Марди Гра» . Музей подводной археологии .
- ^ "MATE - Обучение передовым морским технологиям :: Главная" . Проверено 25 мая 2015 г.
- ^ «Аварийный аппарат Джейсон/Медея - Океанографический институт Вудс-Хоул» . www.whoi.edu/ .
- ^ "ROV VICTOR - IFREMER/Французский океанографический флот" . www.flotteoceanography.fr/en/ .
- ^ «Роботизированный глубоководный аппарат потерян при погружении на глубину 6 миль» . www.whoi.edu/ .
- ^ «Глубокие платформы | Национальный океанографический центр» . noc.ac.uk. Проверено 10 ноября 2021 г.
- ^ «Дистанционно-управляемый аппарат 4500 м (ROV SuBastian)» . Океанический институт Шмидта . 6 февраля 2019 г.
- ^ «Суда и транспортные средства – ТНПА Тибурон» . www3.mbari.org .
- ^ «16 000 часов под водой (и продолжает расти)» . МБАРИ . 10 марта 2017 г.
- ^ «ТНПА Вентана» . МБАРИ . 24 ноября 2015 г.
- ^ «Технические характеристики ROV Doc Ricketts» . МБАРИ . 30 декабря 2015 г.
- ^ «Глубоководные исследования на границе Южной Калифорнии» . Западный колледж . 30 января 2020 г.
- ^ «ROV Луукай» . luukai.php .
- ^ «Дистанционно управляемый автомобиль» . www.gu.se. 22 октября 2021 г.
- ^ «ТНПА Геркулес» . nautiluslive.org . 9 мая 2014 г.
- ^ «Эгир6000 (ROV)» . Университет Бергена .
- ^ «Статистика расписания круизов - GEOMAR - Центр океанических исследований имени Гельмгольца, Киль» . www.geomar.de .
- ^ Министерство торговли США, Национальное управление океанических и атмосферных исследований. «Дистанционно управляемый аппарат Deep Discoverer: Технология: Подводные аппараты: Суда: Управление по исследованию и исследованию океана НОАА» . Oceanexplorer.noaa.gov .
- ^ «Deep Discoverer и Seirios – Глобальный фонд исследования океана» .
- ^ Кё, М.; Хиядзаки, Э.; Цукиока, С.; Очи, Х.; Амитани, Ю.; Цучия, Т.; Аоки, Т.; Такагава, С. (1995). «Ходовые испытания ТНПА полного исследования океанских глубин «КАИКО». «Проблемы нашей меняющейся глобальной окружающей среды». Материалы конференции. ОКЕАНЫ '95 MTS/IEEE . Том. 3. стр. 1991–1996. дои : 10.1109/OCEANS.1995.528882 . ISBN 0-933957-14-9 . S2CID 110932870 .
- ^ Исибаши, Сёдзиро; Ёсида, Хироши; Осава, Хироюки; Иноуэ, Томоя; Тахара, Дзюнъитиро; Ито, Кадзуаки; Ватанабэ, Ёхитака; Сава, Такао; Хякудоме, Тадахиро; Аоки, Таро (апрель 2008 г.). «ТПА «АБИСМО» для исследования и отбора проб в самых глубоких океанских глубинах и система обеспечения его работы». ОКЕАНЫ 2008 — MTS/IEEE Кобе Техно-Океан . стр. 1–6. дои : 10.1109/OCEANSKOBE.2008.4530967 . ISBN 978-1-4244-2125-1 . S2CID 21881841 .
- ^ «CSSF-РОПОС - О нас» . www.ropos.com .
- ^ «REV Ocean's ROV «Аврора» позволяет ученым собирать данные и образцы на глубине 4 км подо дрейфующими арктическими льдами» . www.revocean.or . 25 октября 2021 г.
- ^ «РОВ МАРУМ-КВЕСТ» . www.marum.de 29 июля 2022 г.
- ^ «РОВ МАРУМ-КАЛЬМАР» . www.marum.de 29 июля 2022 г.
- ^ «Лорд Сейнсбери в Саутгемптоне запустит первый в Великобритании глубоководный ROV» . www.southampton.ac.uk . Университет Саутгемптона.
- ^ Лэндис, Номи. Документальный фильм « Тайна кораблекрушения Марди Гра» . Наутилус Продакшнс . Проверено 4 июня 2016 г.
- ^ «Тёмные тайны Лузитании» . Новости ирландского кино . Проверено 4 июня 2016 г.
- ^ «Какие соревнования по подводной робототехнике вам подходят?» . Синяя робототехника . Проверено 5 июня 2024 г.
- ^ «NURC — Национальный конкурс подводной робототехники» . Космический грант НАСА в области робототехники в АГУ . Архивировано из оригинала 30 июня 2016 года . Проверено 4 июня 2016 г.
- ^ « Барт» — подводный аппарат Аргонавта-младшего . подводная лодка . Проверено 4 июня 2016 г.
Внешние ссылки
[ редактировать ]- Что такое подводные ROV и для чего они используются?
- Дистанционно управляемые транспортные средства (ROV) , Ocean Explorer , NOAA
- Что такое дистанционно управляемые транспортные средства (ROV)?
- ROV на Смитсоновском океанском портале
- Тайна кораблекрушения Марди Гра на YouTube

| Базы данных органов управления : Национальные |
|---|