Удаленно управляемый подводным транспортным средством

Удаленно управляемый подводным транспортным средством (Рув) [ Цитация необходима ] Или транспортное средство с дистанционным управлением (ROV) представляет собой свободно плавающее погружение, используемое для выполнения подводных наблюдений, проверки и физических задач, таких как операции клапанов, гидравлические функции и другие общие задачи в рамках подводной нефтяной промышленности, военных, научных и других применений. ROV также могут нести пакеты инструментов для выполнения определенных задач, таких как втягивание и подключение гибких линий и пупок, а также замена компонентов. [ 1 ] Они часто используются для посещения крушения на больших глубинах за пределами возможностей погружных средств для исследовательских целей, таких как Титаник , среди прочего. [ 2 ]
Этот раздел требует расширения с помощью: охватить все остальные приложения. Вы можете помочь, добавив к этому . ( Январь 2024 г. ) |
Описание
[ редактировать ]Это значение отличается от транспортных средств дистанционного управления, работающих на земле или в воздухе. [ нужно разъяснения ] ROV незаняты, обычно очень маневренны и управляются экипажем либо на борту суда/плавающей платформы, либо на непосредственной земле. Они распространены в глубоководных отраслях, таких как на оффшорной углеводородной экстракции. Как правило, они, но не обязательно связаны с хост-кораблем с помощью нейтрально плавучего привязки несущий нагрузку, или, часто при работе в тяжелых условиях или в более глубокой воде, пупочный кабель, используется вместе с системой управления привязкой (TMS). TMS представляет собой либо гаражное устройство, которое содержит ROV во время опускания через зону брызги , либо, на более крупных ROV-классах, отдельной сборке, установленной поверх ROV. Цель TMS состоит в том, чтобы удлинить и сократить привязку, поэтому влияние кабельного сопротивления, где есть подводные токи, сведет к минимуму. Пупочный кабель представляет собой бронированный кабель, который содержит группу электрических проводников и оптоволоконную оптику, которые имеют электроэнергию, видео и сигналы данных между оператором и TMS. Где используется, TMS затем передает сигналы и питание для ROV вниз по тросу. Оказавшись в ROV, электроэнергия распределяется между компонентами ROV. Тем не менее, в мощных применениях, большая часть электроэнергии приводит к мощному электродвигающему двигателю, который управляет Гидравлический насос . Затем насос используется для двигателя и для силового оборудования, такого как инструменты крутящего момента и манипуляторные рычаги, где электродвигатели будут слишком сложно для реализации подводной подводной лодки. Большинство ROV оснащены как минимум видеокамерой и огнями. Дополнительное оборудование обычно добавляется для расширения возможностей автомобиля. Они могут включать сонары , магнитометры , камера неподвижного, манипулятор или режущего рычага, пробоотборники воды и инструменты, которые измеряют ясность воды, температуру воды, плотность воды, скорость звука, проникновение света и температуру. [ 3 ]
Терминология
[ редактировать ]В профессиональной индустрии дайвинга и морских контрактов используется термин с дистанционно управляемым транспортным средством (ROV). [ 4 ] [ 5 ] [ 6 ] [ 1 ]
Классификация
[ редактировать ]Погруженные ROV обычно классифицируются по категориям в зависимости от их размера, веса, способностей или мощности. Некоторые общие оценки:
- Микро - обычно микроклассы очень малы по размеру и весу. Сегодняшние микроклассы могут весить менее 3 кг. Эти ROV используются в качестве альтернативы дайверу, в частности, в местах, где дайвер не может физически вводить, например, канализацию, трубопровод или небольшая полость.
- Mini - Обычно мини -класс ROV весит около 15 кг. Mini-Class ROV также используются в качестве альтернативы дайвера. Один человек может перенести полную систему ROV с ними на маленькой лодке, развернуть ее и выполнить работу без внешней помощи. Некоторые классы микро и мини-классы называются «глазным яблоком»-дифференцировать их от ROV, которые могут выполнять задачи вмешательства.
- Общий - обычно менее 5 л.с. (двигатель); Иногда были установлены маленькие манипуляторы с тремя пальцами, например, на очень раннем RCV 225. Эти ROV могут носить сонарное устройство и обычно используются в приложениях для обследования света. Как правило, максимальная глубина работы составляет менее 1000 метров, хотя он был разработан до 7000 м.
- Класс проверки - это обычно прочные коммерческие или промышленные наблюдения и сбор данных, которые снимают ROV, обычно оснащенные видео с живой питанием, все еще фотография, сонар и другие датчики сбора данных. ROVS Class Class также может иметь манипуляторные руки для легкой работы и манипуляции с объектами.
- Светлый рабочий класс - обычно менее 50 л.с. (двигатель). Эти ROV могут нести некоторые манипуляторы. Их шасси может быть сделано из полимеров, таких как полиэтилен, а не обычные сплавы из нержавеющей стали или алюминия. Обычно они имеют максимальную глубину работы менее 2000 м.
- Тяжелый рабочий класс - обычно менее 220 л.с. (двигатель) с способностью нести по крайней мере два манипулятора. У них есть работа до 3500 м.
- Траншей и погребение - обычно более 200 л.с. (двигатель) и обычно не более 500 л.с. (в то время как некоторые превышают это) с способностью нести кабельные сани и работать на глубине до 6000 м в некоторых случаях.
Погруженные ROV могут быть «бесплатным плаванием», где они работают нейтрально плавучим на привязке от начального корабля или платформы, или они могут быть «гаральными», где они работают из погружного «гаража» или «Топхата» на привязке к тяжелому Гараж, который понижен с корабля или платформы. Оба метода имеют свои плюсы и минусы; [ нужно разъяснения ] Однако очень глубокая работа обычно выполняется с гаражом. [ 7 ]
История
[ редактировать ]
В 1970 -х и 80 -х годах Королевский флот использовал «Cutlet», дистанционно эксплуатируемый погружение, для восстановления практических торпед и шахт. RCA (шум) поддерживал систему «Cutlet 02», основанную на диапазонах BUTEC, в то время как система «03» базировалась на подводной базе на Клайде и управлялась и поддерживалась персоналом RN.
финансировал Военно-морской флот США большую часть ранней разработки технологий ROV в 1960-х годах, что тогда было названо «подводным автомобилем, контролируемым кабелем подводного восстановления» (Curv). Это создало возможность выполнять глубоководную спасательную работу и восстанавливать объекты с пола океана, такую как ядерная бомба, потерянная в Средиземном море после аварии Паломареса B-52 1966 года . Опираясь на эту технологическую базу; Оффшорная нефтегазовая отрасль создала ROV-класса рабочего класса, чтобы помочь в разработке оффшорных нефтяных месторождений. Спустя более десяти лет после того, как они были впервые введены, ROVS стал важным в 1980 -х годах, когда большая часть нового оффшорного развития превысила охват человеческих дайверов. В середине 1980-х годов индустрия морских ROV пострадала от серьезного застоя в технологическом развитии, частично вызванном падением цен на нефть и глобальной экономической рецессии. С тех пор технологическое развитие в индустрии ROV ускорилось, и сегодня ROV выполняют многочисленные задачи во многих областях. Их задачи варьируются от простого осмотра Подводные конструкции, трубопроводы и платформы, соединительные трубопроводы и размещение подводных коллекторов. Они широко используются как в начальном построении застройки под моря, так и в последующем ремонте и обслуживании. [ 8 ] Нефтяная и газовая промышленность расширилась за пределы использования рабочих классов к мини -ROV, которые могут быть более полезными в более мелких средах. Они меньше по размеру, часто допускают снижение затрат и более быстрое время развертывания. [ 9 ]
Погруженные ROV были использованы для выявления многих исторических кораблекрушений, включая RMS Titanic , Bismarck , USS Yorktown , SM U-111 и SS Central America . В некоторых случаях, таких как Titanic и SS Central America , ROV были использованы для восстановления материала с морского пола и донесения его на поверхность, [ 10 ] [ 11 ] Самым последним в июле 2024 года во время титанической экспедиции при восстановлении артефактов. [ 12 ]
В то время как нефтегазовая промышленность использует большинство ROV, другие применения включают науку, военные и спасение. Военные используют ROV для таких задач, как моя очистка и проверка. Использование науки обсуждается ниже.
Строительство
[ редактировать ]ROV-класса рабочего класса построены с большим пакетом флотации поверх алюминиевого шасси, чтобы обеспечить необходимую плавучесть для выполнения различных задач. Из изощренность конструкции алюминиевой рамки варьируется в зависимости от дизайна производителя. Синтаксическая пена часто используется для флотационного материала. Защитник для инструментов может быть установлен в нижней части системы для размещения различных датчиков или пакетов для инструментов. Поместив световые компоненты сверху и тяжелые компоненты на дне, общая система имеет большое разделение между центром плавучести и центром тяжести : это обеспечивает стабильность и жесткость для работы под водой. Проличики расположены между центром плавучести и центром гравитации, чтобы поддерживать стабильность отношения робота в маневре. Различные конфигурации подруга и алгоритмы управления могут использоваться для обеспечения соответствующего позиционного управления и отношения во время эксплуатации, особенно в водах с высоким током. Требутели обычно находятся в сбалансированной векторной конфигурации, чтобы обеспечить наиболее точный контроль.
Электрические компоненты могут находиться в заполненных нефтью воды для плотных компартментов или в одном атмосфере, чтобы защитить их от коррозии в морской воде и раздавлена крайним давлением, оказываемым на ROV, работая глубоко. ROV будет оснащен двигателями, камерами , огнями, привязкой, рамой и пилотными элементами управления для выполнения основной работы. [ 13 ] Дополнительные датчики, такие как манипуляторы и сонар, могут быть установлены по мере необходимости для конкретных задач. [ 14 ] Обычно можно найти ROV с двумя роботизированными руками; У каждого манипулятора может быть другая захватывающая челюсть. Камеры также могут быть охраняются за защиту от столкновений.
Большинство ROV-класса рабочего класса построены, как описано выше; Однако это не единственный стиль в методе строительства ROV. Меньшие ROV могут иметь очень разные конструкции, каждый из которых подходит для ее предполагаемой задачи. Крупные ROV обычно развернуты и эксплуатируются с судов, поэтому ROV может иметь посадки для извлечения на палубу.
Конфигурации
[ редактировать ]Удаленно эксплуатируемые транспортные средства имеют три основные конфигурации. Каждый из них приносит конкретные ограничения.
- Открытые или рамки коробки ROV - это наиболее знакомые из конфигураций ROV - состоящий из открытого кадра, где прилагаются все рабочие датчики, двигатели и механические компоненты. Они полезны для свободного плавания в легких токах (менее 4 узлов на основе спецификаций производителя). Они не подходят для буксируемых применений из -за их очень плохого гидродинамического дизайна. Большинство рабочих и тяжелых рабочих класса основаны на этой конфигурации. [ 15 ]
- Торпедо в форме ROV - это общая конфигурация для сбора данных или класса инспекции. Форма торпедо обеспечивает низкую гидродинамическую сопротивление, но поставляется со значительными ограничениями контроля. Форма торпедо требует высокой скорости (именно поэтому эта форма используется для военных боеприпасов), чтобы оставаться позиционно и устойчиво, но этот тип очень уязвим на высокой скорости. На медленных скоростях (0–4 узлах) страдает от многочисленных нестабильности, таких как индуцированный привязый рулон и тона, ток, индуцированный рулон, шаг и рыскания. Он имеет ограниченные контрольные поверхности на хвосте или корме, которые легко вызывают несчастные компенсационные нестабильности. Они часто называют «буксирной рыбой», поскольку они чаще используются в качестве буксируемого ROV. [ 15 ]
Управление привязкой
[ редактировать ]ROV требует привязки или пупочного (в отличие от AUV), чтобы передавать мощность и данные между транспортным средством и поверхностью. Размер и вес привязки следует учитывать: слишком большой привязку будет отрицательно повлиять на сопротивление транспортного средства, и слишком маленькая может быть недостаточно надежным для поднятия требований во время запуска и восстановления.
Привязка обычно опускается на систему управления привязкой (TMS), которая помогает управлять привязкой, чтобы она не запуталась и не завязалась. В некоторых ситуациях его можно использовать в качестве лебедки для снижения или восстановления транспортного средства. [ 16 ]
Приложения
[ редактировать ]Опрос
[ редактировать ]ROV обследования или проверки, как правило, меньше, чем рабочие классы ROV, и часто подклассифицируются как только класс I: только наблюдение или наблюдение класса II с полезной нагрузкой. [ 17 ] Они используются для оказания помощи с гидрографическим обзором, т.е. местоположением и позиционированием подводных конструкций, а также для инспекционных работ, например, обзоров трубопроводов, проверки куртки и инспекции судов морского корпуса. Обследование ROV (также известные как «глазные яблоки»), хотя и меньше, чем рабочий, часто имеют сопоставимую производительность в отношении способности удерживать позицию в течениях и часто носят аналогичные инструменты и оборудование - освещение, камеры, сонар, ультра -короткая базовая линия ( USBL) Beacon, RAMAN Spectromer , [ 18 ] и STROBE FLASTER в зависимости от возможности полезной нагрузки автомобиля и потребностей пользователя.
Поддержка операций по дайвингу
[ редактировать ]Этот раздел нуждается в расширении . Вы можете помочь, добавив к этому . ( Февраль 2021 г. ) |
ROV Operations в сочетании с одновременными операциями дайвинга находятся под общим надзором над супервайзером по дайвингу по соображениям безопасности. [ 4 ]
Международная ассоциация морских подрядчиков (IMCA) опубликовала руководящие принципы для оффшорной эксплуатации ROV в комбинированных операциях с дайверами в документе с дистанционно управляемым вмешательством транспортных средств во время операций дайвинга (IMCA D 054, IMCA R 020), предназначенное для использования как подрядчиками, так и клиентами. [ 19 ]
Военный
[ редактировать ]ROV использовались несколькими военно -морскими флотами на протяжении десятилетий, в основном для охоты на мино и рисунок.

В октябре 2008 года ВМС США начал улучшать свои спасательные системы в местном уровне, основываясь на мистическом DSRV и опорном ремесле, с модульной системой SRDRS, основанной на привязанном пилотируемом ROV, называемом спасательным модулем под давлением (PRM). Это последовало за годами испытаний и упражнений с подводными лодками из парков нескольких стран. [ 20 ] Он также использует беспилотный Sibitzky ROV для подводной подводной лодки и подготовки подводной лодки для PRM.
также Военно-морской флот использует ROV под названием AN/SLQ-48 Mine Mine Aphine (MNV) для минной войны. Он может пройти 1000 ярдов (910 м) от корабля из -за соединительного кабеля и может достигать 2000 футов (610 м) глубиной. Миссионерские пакеты, доступные для MNV, известны как MP1, MP2 и MP3. [ 21 ]
- MP1 представляет собой кабельный резак для поверхности пришвартованной шахты для эксплуатации восстановления или утилизации взрывоопасных боеприпасов (EOD).
- MP2 представляет собой бомбардировку 75 фунтов (34 кг) связывания взрывоопасной полимерной .
- MP3 представляет собой пришвартованный шахтный кабельный захват и поплавок с комбинацией Bomblet MP2, чтобы нейтрализовать пришвартованные шахты под водой.
Заряды детонируются акустическим сигналом с корабля.
Автономный беспилотный подводной автомобиль AN /BLQ-11 предназначен для скрытой контрмеры шахты и может быть запущен с определенных подводных лодок. [ 22 ]
ROV USNAVY только на кораблях Contrmeasures Mine Class . После заземления USS Guardian (MCM-5) и вывода из эксплуатации USS Avenger (MCM-1) и USS защитника (MCM-2) , только 11 шахтерков по-прежнему действуют в прибрежных водах Бахрейна ( USS Sentry (MCM-3 ) , USS Deasastator (MCM-6) , USS Gladiator (MCM-11) и USS Dextrous (MCM-13) ), Япония ( USS Patriot (MCM-7) , USS Pioneer (MCM-9) , USS Warrior (MCM- 10) и USS начальник (MCM-14) ) и Калифорния ( USS чемпион (MCM-4) , USS Scout (MCM-8) и USS Ardent (MCM-12) ). [ 23 ]
В течение 19 августа 2011 года американская подводная лодка, приготовленная на боинг -роботизированной подводной лодке, была проверена на возможное использование военным для использования американскими военными для преследования вражеских вод, патрулирования местных гавани на угрозы национальной безопасности и промывание океана для обнаружения экологических опасностей. [ 24 ] Норвежский флот осмотрел корабль Хельдж Ингстад норвежским подводным беспилотником норвежского Blueye. [ 25 ]
По мере роста их способностей меньшие ROV также все чаще принимаются военно -морщинами, прибрежными охранниками и портовыми властями по всему миру, включая береговую охрану США и военно -морской флот США, ВМС Королевского Нидерланда, Норвежский флот, Королевский флот и пограничный охранник Саудовской Аравии. Полем Они также были широко приняты полицейскими управлениями и группами по поиску и восстановлению. Полезно для различных задач подводной проверки, таких как утилизация взрывных боеприпасов (EOD), метеорология, безопасность портов, контрмеры шахты (MCM) и морская разведка, наблюдение, разведывание (ISR). [ 26 ]
Наука
[ редактировать ]

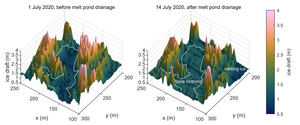
ROV также широко используется научным сообществом для изучения океана. Ряд глубоководных животных и растений был обнаружен или изучен в их естественной среде с помощью ROV; Примеры включают в себя медузы Stellamedusa Ventana и ореоподобные галозавры . В США передовые работы выполняются в нескольких государственных и частных океанографических учреждениях, в том числе в исследовательском институте аквариума Монтерей-Бэй (MBARI), Океанском институте Вудс-Хоул (WHOI) (с Нереусом ) и Университетом Род-Айленда / Институт Для исследования (URI/IFE). [ 27 ] [ 28 ] В Европе Институт Альфреда Вегенера использует ROV для арктических и антарктических исследований морского льда, включая измерение приклеенного движения, [ 29 ] световая передача, [ 30 ] Отложения, кислород, нитрат, температура морской воды и соленость. Для этих целей он оснащен одно- и многоонавочным сонаром, спектрорадиометром , манипулятором, флюорометром , проводимостью/ температурой/ глубиной (измерение солености) (CTD), оптоде и ультрафиолетовым спектрометром. [ 31 ]
Science Rovs принимают много форм и размеров. Поскольку хорошие видеозаписи являются основным компонентом большинства глубоководных научных исследований, Research ROV, как правило, оснащены системами освещения и качествами качества трансляции. [ 32 ] В зависимости от проведенного исследования, научный ROV будет оснащен различными устройствами отбора проб и датчиков. Многие из этих устройств являются единственными в своем роде, современными экспериментальными компонентами, которые были настроены для работы в крайней среде глубокого океана. Science ROV также включают в себя много технологий, разработанных для коммерческого сектора ROV, таких как гидравлические манипуляторы и высокие точные подводные навигационные системы. Они также используются для подводных археологических проектов, таких как проект кораблекрушения Mardi Gras в Мексиканском заливе [ 33 ] [ 34 ] и проект Comas [ 35 ] в Средиземном море. [ 36 ]
Есть несколько больших высококачественных систем, которые примечательны их возможностями и приложениями. Транспортное средство Mbari стоило более 6 миллионов долларов США для разработки и используется главным образом для средней воды и гидротермальных исследований на западном побережье США. [ 37 ] 's Whoi Система Jason внесла много значительного вклада в глубоководные океанографические исследования и продолжает работать по всему миру. URI/IFE ROV является одним из первых научных ROV, которые полностью включали гидравлическую двигательную систему и уникально оснащен для обследования и раскопок древних и современных кораблекрушений. Система канадского научного погружного объекта Ropos постоянно используется несколькими ведущими учреждениями и университетами океанических наук для сложных задач, таких как восстановление глубоководных вентиляционных отверстий и разведка для поддержания и развертывания океанских обсерваторий. [ 38 ]
Образовательная информация
[ редактировать ]Образовательная программа с дистанционно управляемой подводной транспортным средством (ROV)-это образовательный инструмент и комплект, который позволяет студентам элементарной, средней и средней школы построить простой, дистанционно эксплуатируемый подводной автомобиль, из поливинилхлорида (ПВХ) и других легко изготовленных материалов. Полем Программа Seaperch обучает студентам базовым навыкам в дизайне кораблей и подводных лодок и побуждает студентов изучать военно -морскую архитектуру и морские и океанические инженерные концепции. Seaperch Спонсируется , спонсируемая Управлением военно -морских исследований в рамках Национальной военно -морской ответственности за военно -морской инженер (NNRNE), и программа управляется Обществом военно -морских архитекторов и инженеров -морских . [ 39 ]
Еще одно инновационное использование технологии ROV было во время проекта Mardi Gras Shipwreck. «Кораблекрушение Mardi Gras» опустилось около 200 лет назад примерно в 35 милях от побережья Луизианы в Мексиканском заливе в 4000 футов (1200 метров) воды. Кораблекрушение, чья реальная личность остается загадкой, лежал на дне моря, пока он не был обнаружен в 2002 году командой инспекции на нефтяном поле, работающей в компании Gas Gabering Company Okeanos (OGGC). В мае 2007 года экспедиция, возглавляемая Техасским университетом A & M и финансируемая OGGC в соответствии с соглашением с Службой управления полезными исходами (ныне BOEM ), была запущена для проведения самых глубоких научных археологических раскопок, когда -либо предпринимаемых в то время, чтобы изучить место на морском масл. и восстановить артефакты для возможного публичного выставки в государственном музее штата Луизиана . В рамках образовательной работы с образованием Nautilus Productions в партнерстве с Boem , Техасский университет A & M, сеть общественной археологии Флориды [ 40 ] и Veolia Environmental создала часовой HD-документальный фильм [ 41 ] О проекте, короткие видеоролики для публичного просмотра и предоставили видео обновления во время экспедиции. [ 42 ] Видеозапись из ROV была неотъемлемой частью этой аутрич -и широко используемой в документальном фильме « Тайна Марди Грас кораблекрушение» . [ 43 ]
Центр Marine Advanced Technology Education (Mate) использует ROV для обучения средней школы, средней школы, общественного колледжа и студентов университетов о карьере, связанной с океаном, и помогает им улучшить свои науки, техники, инженерные и математические навыки. Ежегодный студенческий конкурс студентов Mate ставит под сомнение студенческие команды со всего мира, чтобы конкурировать с ROV, которые они разрабатывают и создают. В конкурсе используются реалистичные миссии на основе ROV, которые имитируют высокопроизводительную среду на рабочем месте, сосредотачиваясь на другой теме, которая подвергает учащихся множество различных аспектов технических навыков и профессий, связанных с морской пехотой. Конкурс ROV организован Комитетом ROV Mate и Обществом морских технологий и финансируется таким организациями, как Национальная администрация аэронавтики и космического пространства (НАСА), Национальное управление океанического и атмосферного управления (NOAA) , и во многих других организациях, которые признают ценность высококвалифицированных студентов с технологическими навыками, такими как проектирование ROV, инженерия и пилотирование. Мате был создан с финансированием от Национальный научный фонд и со штаб -квартирой в колледже полуострова Монтерей в Монтерей, штат Калифорния . [ 44 ]
Список научных ROV
[ редактировать ]
| Rov имя | Оператор | Годы работы |
|---|---|---|
| Джейсон | Whai | 1988 -Present [ 45 ] |
| ВИКТОР | Фон | 2002 - Present [ 46 ] |
| Нереус | Whai | 2009–2014 [ 47 ] |
| ИГИЛ | Национальный океанографический центр | 2006 - Present [ 48 ] |
| Аукцион | Шмидт Оушен Институт | 2016 - Present [ 49 ] |
| Рова Тибурон | Мбари | 1996–2008 [ 50 ] |
| ROV Ventana | Мбари | 1988 -Present [ 51 ] [ 52 ] |
| ROV DOC RICKETTS | Мбари | 2009 - Present [ 53 ] [ 54 ] |
| Это зависит | Гавайский университет в Маноа | 2013 - Present [ 55 ] |
| V8 Оффшор | Университет Гетеборга | 2011 - Present [ 56 ] |
| Ров Геркулес | Nautilus Live Exploration Trust | 2003 - Present [ 57 ] |
| Ægir6000 | Чаевые | 2015 - Present [ 58 ] |
| Ров нравится | Геомар | 2007 - Present [ 59 ] |
| Глубокий искатель | Глобальный фонд разведки океана | 2013 - Present [ 60 ] [ 61 ] |
| Кайко | Jamstec | 1993–2003 [ 62 ] |
| Бездна | Jamstec | 2007 - Present [ 63 ] |
| Ропос | Канадский научный завод | 1986 -Present [ 64 ] |
| Аврора | Rev Ocean | 2021 - ПРЕДВАРИТЕЛЬНЫЙ [ 65 ] |
| Судоходство | Матовая | 2003 - Present [ 66 ] |
| Мэрум-квадрат | Матовая | 2015 - Present [ 67 ] |
| ИГИЛ | Университет Саутгемптона | 2003 - Present [ 68 ] |
СМИ
[ редактировать ]
По мере развития камер и датчиков, а транспортные средства стали более проворными и простыми в пилоте, ROV стали популярными, особенно у документальных режиссеров из -за их способности получить доступ к глубоким, опасным и ограниченным районам, недостижимым для дайверов. Нет ограничений на то, как долго может быть погружен ROV и захват кадров, что позволяет получить ранее невидимые перспективы. [ 69 ] ROV были использованы при съемок нескольких документальных фильмов, в том числе «Акулы» Ната Гео и темные секреты Лузитании и специального шпиона дикой природы BBC в Маудле. [ 70 ]
В связи с их обширным использованием военных, правоохранительных органов и служб береговой охраны, ROV также участвовали в криминальных драмах, таких как популярная CBS серия CSI .
Хобби
[ редактировать ]С ростом интереса к океану у многих людей, как молодых, так и старых, и повышенной доступности некогда дорогого и некоммерчески доступного оборудования, ROV стали популярным хобби среди многих. Это хобби включает в себя строительство небольших ROV, которые, как правило, изготавливаются из трубопровода из ПВХ и часто могут погрузиться в глубины от 50 до 100 футов, но некоторым удалось достичь 300 футов.
STEM Образование
[ редактировать ]Этот новый интерес к ROVS привел к созданию многих соревнований, в том числе Mate (Marine Advanced Technology Education), NURC (National Underwater Robotics Challenge) и Robosub . [ 71 ] Это соревнования, на которых конкуренты, чаще всего школы и другие организации конкурируют друг с другом в серии задач, используя ROV, которые они создали. [ 72 ] Большинство хобби -ROV тестируются в бассейнах и озерах, где вода спокойна, однако некоторые проверяют свои личные ROV в море. Это, однако, создает много трудностей из -за волн и течений, которые могут привести к тому, что ROV уйдет с курса или борется за то, чтобы протолкнуть прибой из -за небольшого размера двигателей, которые приспособлены к большинству хобби. [ 73 ]
Смотрите также
[ редактировать ]- Автономный подводной транспортный автомобиль - не подводное подводное транспортное средство с автономной системой руководства
- Echo Ranger - Морской автономный подводной автомобиль, построенный Boeing
- Eelume - автономный подводной автомобиль для проверки, технического обслуживания и ремонта
- Global Explorer ROV - Deep Water Science and Survey Experting Exant
- Helix Energy Solutions Group - поставщик оффшорных услуг и операций ROV
- Nereus (подводной транспортный автомобиль) - гибридный дистанционно эксплуатируемый или автономный подводной автомобиль
- Pantherov - Центр исследований пресноводной воды Страниц системы Висконсинского университета,
- Scorpio ROV - Рабочий класс удаленно управлял подводным транспортным средством
- Подводная (технология) - Технология погруженных операций на морских
- Система подводного акустического позиционирования - система отслеживания и навигации подводных транспортных средств или дайверов с использованием акустических сигналов
- Конвенция ЮНЕСКО о защите подводного культурного наследия - договор, принятый 2 ноября 2001 года
- Videoray Urovs - серия инспекционных классов с дистанционно управляемыми подводными транспортными средствами
- Роботизированное неразрушающее тестирование -метод проверки с использованием дистанционно управляемых инструментов
- Радио-контролируемая подводная лодка , работающая через радиоконтролирование
- Беспилотный подводной транспортный автомобиль - погружаемые транспортные средства, которые могут работать под водой без обитателя человека
Ссылки
[ редактировать ]- ^ Jump up to: а беременный «ISO 13628-8: 2002: Индустрия нефти и природного газа-проектирование и эксплуатация подводных систем производства-Часть 8: Интерфейсы с дистанционным управлением (ROV) в подводных системах» . Iso . Получено 2023-02-19 .
- ^ «Экспедиции на сайт Titanic Wreck» . www.discovertitanic.com . Получено 2024-08-17 .
- ^ «Дизайн и функционирование транспортных средств с дистанционным управлением» . Морское . Архивировано с оригинала 1 июля 2016 года . Получено 4 июня 2016 года .
- ^ Jump up to: а беременный Персонал (февраль 2014 г.). Международный кодекс практики IMCA для оффшорного дайвинга . Лондон: Международная ассоциация морских подрядчиков.
{{cite book}}:|work=игнорируется ( помощь ) - ^ Правила дайвинга 2009 . Претория: государственный принтер. Архивировано с оригинала 2016-11-04 . Получено 2019-03-16 -через Южный Африканский Институт юридической информации.
{{cite book}}:|work=игнорируется ( помощь ) - ^ «IMCA C 005: Руководство по обеспечению и оценке компетентности: удаленные системы и разделение ROV» (Откр. 3 изд.). Международная ассоциация морских подрядчиков . Январь 2011 . Получено 16 марта 2019 года .
- ^ «Категории ROV - резюме» . Удаленное управление транспортным средством . Архивировано с оригинала 17 сентября 2016 года . Получено 4 июня 2016 года .
- ^ «Что такое ROV» . Kmex Group . Получено 4 июня 2016 года .
- ^ Дела, политика Chevron, правительство и общественность. «Mini ROV делает волны в подводных проверках» . Chevron.com . Получено 2024-01-12 .
{{cite web}}:|first=Имеет общее имя ( справка ) CS1 Maint: несколько имен: список авторов ( ссылка ) - ^ «Корабли и технологии, используемые во время титанических экспедиций» . Вудс Хоул Океанографический институт . Получено 4 июня 2016 года .
- ^ @Natgeouk (2022-09-30). «Эксклюзивный: крушение легендарной Первой мировой войны, немецкая подводная лодка, найденная от Вирджинии» . National Geographic . Получено 2024-01-11 .
- ^ «Титаническая экспедиция 2024» . www.discovertitanic.com . Получено 2024-08-17 .
- ^ "Что такое подводной ROV?" Полем Синяя робототехника . Получено 2024-01-12 .
- ^ "Что такое подводные ROV и как они используются?" Полем ReachRobotics.com . 2021-10-08 . Получено 2023-03-29 .
- ^ Jump up to: а беременный «Удаленное управление транспортным средством Общества морских технологий» . rov.org . Получено 2017-10-10 .
- ^ Бай, Юн (2019). Справочник по подводной инженерии (второе изд.). Elsevier Science. ISBN 978-0-12-812622-6 .
- ^ Персонал (7 августа 2015 г.). «Всемирная статистика ROV за 2014 год» . Imca . Получено 18 августа 2016 года .
- ^ Тиг, Джонатан; Мегсон-Смит, Дэвид; Вербелен, Янник; Скотт, Томас (6 марта 2022 года). «Подводные спектроскопические методы для характеристики ядерных отходов на месте» . Материалы WM2022 . Управление ядерными отходами (WM2022). Феникс, Аризона.
- ^ «IMCA выпускает руководство ROV во время Diving Ops» . www.offshore-erergy.biz . Оффшорная энергия. 2 февраля 2015 года . Получено 10 февраля 2021 года .
- ^ Тарантола, Эндрю (11 октября 2012 г.). «Этот ROV ныряет 2000 футов, чтобы спасти моряков на затонувшей подводной лодке» . Гизмодо . Получено 4 июня 2016 года .
- ^ «AN/SLQ -48 - среда нейтрализации шахты» . Фар Получено 4 июня 2016 года .
- ^ «AN/BLQ-11 Автономный беспилотный подводной автомобиль» . Военно -морские военно -морские военно -морские военно -морские военно -морские военно -морские военно -морские военно -морские военно -морские военно -морские вороты . Получено 4 июня 2016 года .
- ^ Дэн Петти. «Файл ВМС США - Факт: шахты Countermaers Корабли - MCM» . Получено 25 мая 2015 года .
- ^ Хенниган, WJ (2011-08-19). «Boeing Co. испытает подводную лодку на острове Санта -Каталина» . Los Angeles Times . Получено 25 мая 2015 года .
- ^ Blueye Robotics (2018-12-19), Норвежский флот, пилотирующий подводной беспилотник Blueye Pioneer | Frigate Helge Ingstad , извлечен 2019-02-25
- ^ «Blueprint Lab и Videoray в партнерстве для нового инструмента EOD для ВМС США» . Онта Ocean News. 23 марта 2020 года . Получено 14 мая 2020 года .
- ^ Hg Greene; DS ставки; DL Orange; JP Барри; BH Robison (1993). «Применение транспортного средства с дистанционным управлением в геологическом картировании залива Монтерей, штат Калифорния, США» . Хейн и Крэйн (ред.). Дайвинг для науки ... 1993 . Труды Американской академии подводных наук (13 -й ежегодный научный симпозиум дайвинг). Архивировано из оригинала 13 марта 2009 года . Получено 2008-07-11 .
{{cite journal}}: Cs1 maint: непредвзятый URL ( ссылка ) - ^ C Harrold, K Light & S Lisin. (1993). «Распределение, изобилие и использование макрофитов для дрейфов в системе подводных каньонов в ближней прибрежной среде» . В: Heine и Crane (eds). Дайвинг для науки ... 1993 . Труды Американской академии подводных наук (13 -й ежегодный научный симпозиум дайвинг). Архивировано из оригинала 13 марта 2009 года . Получено 2008-07-11 .
{{cite journal}}: Cs1 maint: непредвзятый URL ( ссылка ) - ^ Salgank, evgenii; Катляйн, христианин; Ланге, Бенджамин А.; Мэтью, Илкка; Лей, Руибо; Фонг, Эллисон А.; Фонс, Стивен У.; Божественный, Дмитрий; Оггье, Марк; Кастеллани, Джулия; Бозато, Дебора; Чемберлен, Эмелия Дж.; Хоуп, Дж. М. Клара; Мюллер, Оливер; Гарднер, Джесси; Ринке, Аннет; Перейра, Патрик Симаес; Беременная, Адам; Марсей, Крис; Вебстер, Мелинда А.; Маус, Сенке; Høyland, Knut v.; Гранског, Матс А. (2023). «Временная эволюция слоев расплавной воды и ложных дновых дно и их влияние на летнюю баланс массы Арктического морского льда » Elementa: наука антропоцена 11 (1). Университет Калифорнийского университета издательство: 00035. Bibcode : 2023333.11 ... 35S Doi : 10.1525/ elementa.2022.0 HDL : 10037/30456 ISSN 2325-1 S2CID 257937347
- ^ Анхаус, Филипп; Катляйн, христианин; Николай, Марсель; Arndt, Stefanie; Ютила, Артту; Хаас, Кристиан (2021-12-17). «Извлечение глубины снега на арктическом морском льду с использованием измерений гиперспектрального излучения под приложением» . Границы в науке Земли . 9 Frontiers Media SA: 1174. Bibcode : 2021freas ... 9.1174a . doi : 10.3389/feart.2021.711306 . ISSN 2296-6463 .
- ^ Катляйн, христианин; Шиллер, Мартин; Белтер, Ганс Дж.; Копполаро, Вероника; Венслендт, Дэвид; Николай, Марсель (2017-09-04). «Новая дистанционная датчика для междисциплинарных наблюдений под морским льдом» . Границы в морской науке . 4 Frontiers Media SA. doi : 10.3389/fmars.2017.00281 . HDL : 10013/EPIC.51540.D001 . ISSN 2296-7745 .
- ^ Reed JK, Koenig CC, Shepard AN, Gilmore Jr Rg (2007). «Долгосрочный мониторинг глубоководного кораллового рифа: эффекты нижнего тракта» . В: NW Pollock, JM Godfrey (ред.) Дайвинг для науки… 2007 . Труды Американской академии подводных наук (двадцать шестой ежегодный научный симпозиум). Архивировано с оригинала 22 ноября 2008 года . Получено 2008-07-11 .
{{cite journal}}: Cs1 maint: непредвзятый URL ( ссылка ) - ^ «Проекты, Марди Гра» . Флорида общественная археологическая сеть . Университет Западной Флориды. Архивировано с оригинала 9 ноября 2017 года . Получено 8 ноября 2017 года .
- ^ "Mardi Gras Project" . Центр морской археологии и сохранения .
- ^ Бруно, Ф.; и др. (2016). «Проект COMAS: новые материалы и инструменты для улучшения документации на месте, восстановления и сохранения подводных археологических останков». Журнал Морского технологического общества . 50 (4): 108–118. doi : 10.4031/mtsj.50.4.2 .
- ^ ROV для поддержки запланированного обслуживания в подводных археологических участках . MTS/IEEE Oceans 2015 - Генова: открытие устойчивой энергии океана для нового мира. doi : 10.1109/Oceans-Genova.2015.7271602 .
- ^ TM Shank, DJ Fornari, M Edwards, R Haymon, M Lilley, K Von Damm и Ra Lutz . (1994). «Быстрое развитие структуры биологического сообщества и связанных с ними геологических особенностей в гидротермальных вентиляционных отверстиях на севере 9-10, восточно-тихоокеанской рост» . В: M Deluca (ред.). Дайвинг для науки ... 1994 . Труды Американской академии подводных наук (14 -й ежегодный научный симпозиум дайвинг). Архивировано из оригинала 13 марта 2009 года . Получено 2008-07-11 .
{{cite journal}}: Cs1 maint: несколько имен: списки авторов ( ссылка ) CS1 Maint: INPECT URL ( ссылка ) - ^ «Ропос - канадский научный погружный объект» . Ропос . Получено 4 июня 2016 года .
- ^ "Seaperch.org :: Официальный сайт Seaperch" . Получено 25 мая 2015 года .
- ^ "FPAN HOME" . Флорида публичная археология .
- ^ Landis, Nomee (2008). «Тайна Марди Гра, кораблекрушение» . Nautilus Productions .
- ^ Фолк, Кимберли Л; Аллен, Рик (сентябрь 2017 г.). «Свет, камера ... кораблекрушение!?! Мультимедиа на четыре тысячи футов». Историческая археология . 51 (3): 418–424. doi : 10.1007/s41636-017-0051-1 . S2CID 164446605 .
- ^ Opdyke, Mark (2007). «Тайна Марди Гра, документальный фильм о кораблекрушении» . Музей подводной археологии .
- ^ "Mate - Marine Advanced Technology Education :: Дом" . Получено 25 мая 2015 года .
- ^ «Rov Jason/Medea - Океанографическое учреждение Вудс -Хоул» . www.whoi.edu/ .
- ^ «Rov Victor - Ifremer/French Oceanographic Fleet» . www.flotteoceanographic.fr/en/ .
- ^ «Роботизированное глубоководное транспортное средство потеряно на глубине 6 миль» . www.whoi.edu/ .
- ^ «Глубокие платформы | Национальный океанографический центр» . noc.ac.uk. Получено 2021-11-10 .
- ^ «4500 м удаленно управляемым транспортным средством (ROV Subastian)» . Шмидт Оушен Институт . 6 февраля 2019 года.
- ^ «Суда и транспортные средства - Rov Tiburon» . www3.mbari.org .
- ^ «16 000 часов под морем (и считать)» . Мбари . 10 марта 2017 года.
- ^ «Роув Вентана» . Мбари . 24 ноября 2015 года.
- ^ "Rov Doc Ricketts спецификации" . Мбари . 30 декабря 2015 года.
- ^ «Глубокое исследование моря на границе Южной Калифорнии» . Западный колледж . 30 января 2020 года.
- ^ "Ров Луукай" . Luukai.php .
- ^ «Удаленно управляемое транспортное средство» . www.gu.se. 22 октября 2021 года.
- ^ «Ров Геркулес» . nautiluslive.org . 9 мая 2014 года.
- ^ «Ægir6000 (ROV)» . Университет Бергена .
- ^ «Статистика круиза - Геомар - Гельмгольц Центр исследований океана Киля» . www.geomar.de .
- ^ Министерство торговли США, Национальное управление океанического и атмосферного. «Дистанционно управляемый автомобиль Deep Discoverer: Технология: Погружения: суда: Офис исследований и исследований в области океана NOAA» . OceanExplorer.noaa.gov .
- ^ «Глубокий открытие и Seirios - Глобальный фонд разведки океана» .
- ^ Kyo, M.; Hiyazaki, E.; Tsukioka, S.; Ochi, H.; Amitani, Y.; Tsuchiya, T.; Aoki, T.; Такагава С. (1995). «Морское испытание" Кайко ", полное исследование глубины океана". «Проблемы нашей меняющейся глобальной среды». Слушания конференции. Океаны '95 мт/IEEE . Тол. 3. С. 1991–1996. doi : 10.1109/Ocean.1995.528882 . ISBN 0-933957-14-9 Полем S2CID 110932870 .
- ^ Ishibashi, Shojiro; Йошида, Хироши; Осава, Хироюки; Иноуэ, Томоя; Тахара, Джуничиро; Ито, Казуаки; Ватанабе, Йохитака; Сава, Такао; Hyakudome, Tadahiro; Аоки, Таро (апрель 2008 г.). "Rov" abismo "для осмотра и отбора проб в самом глубоком океане и его системе поддержки операции". Oceans 2008 - MTS/IEEE Kobe Techno -Ocean . С. 1–6. doi : 10.1109/oceanskobe.2008.4530967 . ISBN 978-1-4244-2125-1 Полем S2CID 21881841 .
- ^ «CSSF -ROPOS - о нас» . www.ropos.com .
- ^ «REV Ocean» ROV «Aurora» позволяет ученому собирать данные и образцы 4 км под дрейфующим арктическим льдом » . www.revocean.or . 25 октября 2021 года.
- ^ "Rov Marum-quest" . www.mmum.de. 2022-07-29.
- ^ "Rov Marum-Squid" . www.mmum.de. 2022-07-29.
- ^ «Лорд Сэйнсбери в Саутгемптоне, чтобы запустить первое в Великобритании объект ROV в глубоководстве» . www.southampton.ac.uk . Университет Саутгемптона.
- ^ Лэндис, Номей. « Тайна Марди Грас кораблекрушение» документальный фильм » . Nautilus Productions . Получено 4 июня 2016 года .
- ^ «Темные секреты Лузитании» . Ирландские фильмы новости . Получено 4 июня 2016 года .
- ^ "Какой конкурс подводной робототехники вам подходит?" Полем Синяя робототехника . Получено 2024-06-05 .
- ^ «NURC - Национальный вызов подводной робототехники» . НАСА Space Grant Robotics в ASU . Архивировано с оригинала 30 июня 2016 года . Получено 4 июня 2016 года .
- ^ « Барт» - подводный ROV Аргонавта -младшего » . подводная лодка . Получено 4 июня 2016 года .
Внешние ссылки
[ редактировать ]- Что такое подводные ROV и для чего они используются?
- Транспортные средства с дистанционным управлением (ROV) , Ocean Explorer , NOAA
- Что такое транспортные средства с дистанционным управлением (ROV)? [узурпировал]
- Rovs на океанском портале Смитсоновского института
- Тайна Марди Грас кораблекрушение на YouTube

| Базы данных управления авторитетом : национальный |
|---|