Подводная лодка


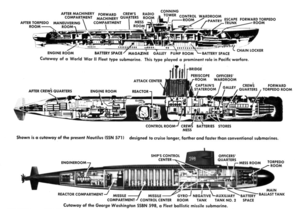
- времен Второй мировой войны Подводная лодка флота , введена в строй в 1941–1945 гг.
- Первая атомная подводная лодка USS Nautilus (SSN-571) , введена в строй в 1954 году:
- Первая подводная лодка с баллистическими ракетами USS George Washington (SSBN-598) , введена в строй в 1959 году.
( Подводная лодка или субмарина ) — плавсредство, способное к самостоятельной работе под водой. Он отличается от подводного аппарата , который имеет более ограниченные возможности подводного плавания. [1] Этот термин также иногда используется исторически или в разговорной речи для обозначения дистанционно управляемых транспортных средств и роботов , а также судов среднего или меньшего размера, таких как сверхмалая подводная лодка и мокрая подводная лодка . Подводные лодки называются лодками, а не кораблями , независимо от их размера. [2]
Хотя экспериментальные подводные лодки были построены и раньше, проектирование подводных лодок получило широкое распространение в XIX веке, и они были приняты на вооружение нескольких военно-морских сил. Впервые они получили широкое распространение во время Первой мировой войны (1914–1918 гг.), а сейчас используются во многих военно-морских силах , больших и малых. Военное использование включает нападение на надводные корабли противника (торговые и военные) или другие подводные лодки, а также для защиты авианосцев , проведения блокады , ядерного сдерживания , разведки , обычных наземных атак (например, с использованием крылатой ракеты ) и скрытого ввода спецназа . Гражданское использование включает морскую науку , спасение , разведку, а также проверку и техническое обслуживание объектов. Подводные лодки могут быть модифицированы для выполнения специализированных функций, таких как поисково-спасательные операции и подводных кабелей ремонт . Их используют в туризме и подводной археологии . Современные глубоководные подводные лодки произошли от батискафа , который произошел от водолазного колокола .
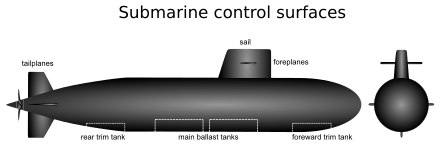
Большинство крупных подводных лодок состоят из цилиндрического корпуса с полусферическими (или коническими) концами и вертикальной конструкции, обычно расположенной на миделе корабля, в которой размещены устройства связи и датчики, а также перископы . В современных подводных лодках эта конструкция называется « парусом » в американском понимании и «плавником» в европейском. Особенностью более ранних проектов была « боевая рубка »: отдельный прочный корпус над основным корпусом лодки , что позволяло использовать более короткие перископы. Сзади имеется гребной винт (или водометный насос) и различные гидродинамические ребра управления. Меньшие, глубоководные и специальные подводные лодки могут значительно отличаться от этой традиционной конструкции. Подводные лодки погружаются и всплывают на поверхность с помощью пикирующих самолетов и изменения количества воды и воздуха в балластных цистернах , влияющих на их плавучесть .
Подводные лодки охватывают широкий спектр типов и возможностей. Они включают в себя небольшие автономные экземпляры, такие как одно- или двухместные подводные лодки, которые работают в течение нескольких часов, и суда, которые могут оставаться под водой в течение шести месяцев, такие как российские подводные лодки класса «Тайфун» , самые большие из построенных подводных лодок. Подводные лодки могут работать на большей глубине, чем это возможно или практически невозможно для водолазов- людей . [3]
История
Этимология
Слово «подводная лодка» означает «подводный» или «подводный» (например, подводный каньон , подводный трубопровод ), хотя как существительное оно обычно относится к судну, которое может путешествовать под водой. [4] Термин представляет собой сокращение подводной лодки . [5] [6] и встречается как таковой в нескольких языках, например, во французском ( sous-marin ) и испанском ( submarino ), хотя другие сохраняют первоначальный термин, например, в голландском ( Onderzeeboot ), немецком ( Unterseeboot ), шведском ( Undervattensbåt ) и русском ( подводная лодка : подводная лодка ), все это означает «подводная лодка». По военно-морской традиции подводные лодки обычно называют лодками, а не кораблями , независимо от их размера. [2] Хотя неофициально их называют лодками , [7] [8] Подводные лодки США используют обозначение USS ( корабль США ) в начале своего названия, например USS Alabama . В Королевском флоте обозначение HMS может относиться к «Кораблю Его Величества» или «Подводной лодке Его Величества», хотя последнее иногда переводится как «HMS/m». [9] [Примечание 1] а подводные лодки обычно называют лодками, а не кораблями . [Примечание 2]
Первые подводные лодки с приводом от человека
16 и 17 века
Согласно отчету в Opusculum Taisnieri, опубликованному в 1562 году: [10]
Два грека несколько раз погружались и всплывали в реке Тежу недалеко от города Толедо в присутствии императора Священной Римской империи Карла V , не намокнув и с горящим пламенем, которое они несли в руках. [11]
В 1578 году английский математик Уильям Борн записал в своей книге «Изобретения или изобретения» один из первых планов подводного навигационного аппарата. [12] Несколько лет спустя шотландский математик и теолог Джон Нэпьер написал в своих «Тайных изобретениях» (1596 г.), что «эти изобретения, помимо способов говорить под водой с помощью водолазов, других устройств и стратегий для нанесения вреда врагам по милости Божией и работы экспертов Мастера, которых я надеюсь выступить». Неизвестно, осуществил ли он свою идею. [13]
Херонимо де Аянс-и-Бомон (1553–1613) создал детальные проекты двух типов модернизированных с помощью воздуха подводных аппаратов. Они были оснащены веслами, автономными плавучими трубками, работающими от внутренних насосов, иллюминаторами и перчатками, с помощью которых экипаж мог манипулировать подводными объектами. Аяназ планировал использовать их в боевых действиях, чтобы незаметно приближаться к вражеским кораблям и устанавливать пороховые заряды с таймером на их корпусах. [14]
Первый подводный аппарат, о конструкции которого имеются достоверные сведения, был спроектирован и построен в 1620 году Корнелисом Дреббелем , голландцем на службе Якова I Английского . Его приводили в движение веслами. [13]
18 век
К середине 18 века в Англии было выдано более дюжины патентов на подводные лодки. В 1747 году Натаниэль Саймонс запатентовал и построил первый известный рабочий пример использования балластной цистерны для погружения. В его конструкции использовались кожаные сумки, которые можно было наполнить водой и погрузить корабль в воду. Был использован механизм, который выкручивал воду из мешков и заставлял лодку всплывать на поверхность. В 1749 году журнал Gentlemen's Magazine сообщил, что аналогичная конструкция первоначально была предложена Джованни Борелли в 1680 году. Дальнейшее совершенствование конструкции застопорилось более века, пока не были применены новые технологии для движения и устойчивости. [15]
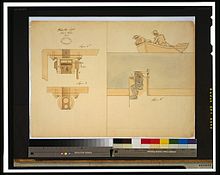
Первым военным подводным аппаратом была «Черепаха» (1775 г.), устройство в форме желудя с ручным приводом, разработанное американцем Дэвидом Бушнеллом для размещения одного человека. [16] Это была первая проверенная подводная лодка, способная к самостоятельной подводной работе и передвижению, а также первая, использовавшая винты в качестве двигательной установки. [17]
19 век
В 1800 году Франция построила «Наутилус» , подводную лодку с человеческим двигателем, спроектированную американцем Робертом Фултоном . Они отказались от эксперимента в 1804 году, как и британцы, когда пересмотрели проект подводной лодки Фултона.
В 1850 году Вильгельма Бауэра . «Брандтаухер» в Германии был построен Это самая старая из известных сохранившихся подводных лодок в мире. [18]
В 1864 году, в конце Гражданской войны в США , военно-морского флота Конфедерации стала HL Hunley первой военной подводной лодкой, которая потопила вражеское судно, военный шлюп Союза USS Housatonic , используя бочонок с порохом на лонжероне. торпедный заряд. « Ханли» также затонул. Ударные волны взрыва могли мгновенно убить экипаж, не позволив им откачать трюм или привести подводную лодку в движение. [19]
В 1866 году Sub Marine Explorer стала первой подводной лодкой, которая успешно нырнула, совершила круиз под водой и всплыла на поверхность под контролем экипажа. В конструкции американца немецкого происхождения Юлиуса Х. Кроля (по-немецки Kröhl ) были использованы элементы, которые до сих пор используются в современных подводных лодках. [20]
В 1866 году Флах был построен по просьбе чилийского правительства Карлом Флахом , немецким инженером и иммигрантом. Это была пятая подводная лодка, построенная в мире. [21] и вместе со второй подводной лодкой предназначался для защиты порта Вальпараисо от нападения испанского флота во время войны за острова Чинча .
Подводные лодки с механическим приводом
Подводные лодки не могли быть широко приняты на вооружение военно-морским флотом до тех пор, пока не были разработаны подходящие двигатели. Эпоха с 1863 по 1904 год стала поворотным моментом в развитии подводных лодок, и появилось несколько важных технологий. Ряд стран построили и использовали подводные лодки. Дизель-электрическая силовая установка стала доминирующей энергосистемой, а такое оборудование, как перископ, стало стандартизированным. Страны провели множество экспериментов по эффективной тактике и вооружению подводных лодок, что привело к их большому влиянию в Первой мировой войне .
1863–1904
Первой подводной лодкой, не полагавшейся на человеческую силу для движения, была французская «Плонжер» ( «Дайвер» ), спущенная на воду в 1863 году, которая использовала сжатый воздух под давлением 1200 кПа (180 фунтов на квадратный дюйм ). [ нужна ссылка ] Нарсис Монтуриоль спроектировал первую воздухонезависимую с двигателем внутреннего сгорания подводную лодку Ictíneo II , которая была спущена на воду в Барселоне , Испания, в 1864 году.
Подводная лодка стала потенциально жизнеспособным оружием с разработкой торпеды Уайтхеда , разработанной в 1866 году британским инженером Робертом Уайтхедом , первой практической самоходной или «локомотивной» торпеды. [22] Лонжеронная торпеда , разработанная ранее ВМС Конфедеративных Штатов, считалась непрактичной, поскольку считалось, что она потопила как намеченную цель, так и HL Hunley подводную лодку , которая ее развернула.
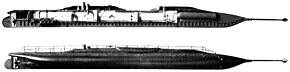
Ирландский изобретатель Джон Филип Холланд построил модель подводной лодки в 1876 году, а в 1878 году продемонстрировал Holland I. прототип За этим последовал ряд неудачных проектов. В 1896 году он спроектировал подводную лодку «Холланд Тип VI», которая использовала энергию двигателя внутреннего сгорания на поверхности и энергию электрической батареи под водой. Спущенная на воду 17 мая 1897 года на верфи лейтенанта Льюиса Никсона в Crescent Shipyard Элизабет , штат Нью-Джерси , Holland VI была куплена ВМС США 11 апреля 1900 года, став первой введенной в строй подводной лодкой ВМФ, получившей название USS Holland . [23]
Дискуссии между английским священнослужителем и изобретателем Джорджем Гарреттом и шведским промышленником Торстеном Норденфельтом привели к созданию первых практических подводных лодок с паровым двигателем, вооруженных торпедами и готовых к военному использованию. Первым был Nordenfelt I , 56-тонное судно длиной 19,5 метров (64 фута), похожее на злополучный Resurgam Гаррета (1879 г.), с дальностью полета 240 километров (130 морских миль; 150 миль), вооруженное одной торпедой . в 1885 году.

Надежное средство передвижения для затопленного судна стало возможным только в 1880-х годах с появлением необходимой технологии электрических батарей. Первые лодки с электрическим приводом были построены Исааком Пералем-и-Кабальеро в Испании (построившим Peral ), Дюпюи де Ломом (построившим Gymnote ) и Гюставом Зеде (построившим Sirène ) во Франции, а также Джеймсом Франклином Уоддингтоном (построившим Porpoise ) в Англии . . [24] В конструкции Перала использовались торпеды и другие системы, которые позже стали стандартными для подводных лодок. [25] [26]


Введенный в эксплуатацию в июне 1900 года французский паровой и электрический «Нарвал» имел типичную теперь двухкорпусную конструкцию с прочным корпусом внутри внешней оболочки. Эти 200-тонные корабли имели запас хода под водой более 160 км (100 миль). Французская подводная лодка «Эгрет» в 1904 году еще больше усовершенствовала эту концепцию, используя дизельный, а не бензиновый двигатель для надводной энергетики. Было построено большое количество этих подводных лодок, семьдесят шесть из которых были построены до 1914 года.
Королевский флот ввел в эксплуатацию пять подводных лодок класса «Голланд» из Виккерса , Барроу-ин-Фернесс , по лицензии компании Holland Torpedo Boat Company с 1901 по 1903 год. море 6 апреля 1902 года. Хотя конструкция была полностью куплена у американской компании, фактическая использованная конструкция представляла собой непроверенное улучшение оригинальной голландской конструкции с использованием нового бензинового двигателя мощностью 180 лошадиных сил (130 кВт). [27]
Эти типы подводных лодок впервые были применены во время русско-японской войны 1904–05. Из-за блокады Порт-Артура русские направили свои подводные лодки во Владивосток , где к 1 января 1905 года насчитывалось семь лодок, чего было достаточно для создания первого в мире «действующего подводного флота». Новый подводный флот начал патрулирование 14 февраля, обычно продолжительностью около 24 часов каждое. Первое столкновение с японскими военными кораблями произошло 29 апреля 1905 года, когда русская подводная лодка «Сом» была обстреляна японскими торпедными катерами, но затем отошла. [28]
Первая мировая война

Военные подводные лодки впервые оказали значительное влияние во время Первой мировой войны . Такие силы, как подводные лодки Германии, участвовали в Первой битве за Атлантику и были ответственны за потопление RMS Lusitania , которое было потоплено в результате неограниченной подводной войны и часто упоминается среди причин вступления Соединенных Штатов в войну. Штаты в войну. [29]
К началу войны Германия имела в боевом распоряжении всего двадцать подводных лодок, хотя в их число входили суда дизельного класса U-19 , имевшие достаточную дальность плавания 5000 миль (8000 км) и скорость 8 узлов (15 км). /h), чтобы позволить им эффективно действовать вокруг всего британского побережья., [30] Напротив, Королевский флот имел в общей сложности 74 подводные лодки, хотя и различной эффективности. В августе 1914 года флотилия из десяти подводных лодок отплыла со своей базы в Гельголанде , чтобы атаковать военные корабли Королевского флота в Северном море в ходе первого в истории боевого патрулирования подводных лодок. [31]
Способность подводных лодок функционировать как практические военные машины основывалась на новой тактике, их численности и технологиях подводных лодок, таких как комбинированная дизель-электрическая энергетическая система, разработанная в предыдущие годы. Подводные лодки, которые больше подходят для подводного плавания, чем настоящие подводные лодки, действовали в основном на поверхности, используя обычные двигатели, время от времени погружаясь для атаки при питании от батарей. Они имели примерно треугольное поперечное сечение, с отчетливым килем для контроля качки на поверхности и отчетливой носовой частью. более 5000 кораблей союзников . Во время Первой мировой войны подводными лодками было потоплено [32]
Британцы ответили на немецкие разработки в области подводной техники созданием подводных лодок класса «К» . Однако эти подводные лодки были заведомо опасны в эксплуатации из-за различных конструктивных недостатков и плохой маневренности. [33] [34]
Вторая мировая война


Во время Второй мировой войны Германия использовала подводные лодки с разрушительным эффектом в битве за Атлантику , где она попыталась перерезать британские маршруты снабжения, потопив больше торговых судов , чем Британия могла заменить. Эти торговые суда были жизненно необходимы для снабжения населения Великобритании продовольствием, промышленности — сырьем, а вооруженных сил — топливом и вооружением. Хотя в межвоенные годы подводные лодки были модернизированы, основным нововведением стала улучшенная связь, зашифрованная с помощью шифровальной машины «Энигма» . массовых атак Это позволило использовать военно- морскую тактику ( Рудельтактик , широко известную как « волчья стая »), которая в конечном итоге перестала быть эффективной, когда «Энигма» подводной лодки была взломана . К концу войны союзников (175 военных кораблей, 2825 торговых судов). подводными лодками было потоплено почти 3000 кораблей [35] Несмотря на успех в начале войны, немецкий подводный флот понес тяжелые потери, потеряв 793 подводные лодки и около 28 000 подводников из 41 000, то есть уровень потерь около 70%. [36]
Императорский флот Японии имел самый разнообразный флот подводных лодок среди всех военно-морских сил, включая «Кайтэн» торпеды с экипажем «Ко-хётеки» и «Кайрю» , сверхмалые подводные лодки ( классы дальнего действия ), подводные лодки средней дальности, специально построенные подводные лодки снабжения и подводные лодки . У них также были подводные лодки с самой высокой скоростью подводного плавания во время Второй мировой войны ( И-201 подводные лодки класса ) и подводные лодки, способные нести несколько самолетов ( И-400 подводные лодки класса ). Они также были оснащены одной из самых совершенных торпед конфликта — « Тип 95» с кислородным двигателем . Тем не менее, несмотря на их техническое мастерство, Япония решила использовать свои подводные лодки для боевых действий флота, и, следовательно, это было относительно неудачно, поскольку военные корабли были быстрыми, маневренными и хорошо защищенными по сравнению с торговыми судами.
Подводные силы были самым эффективным противокорабельным оружием в американском арсенале. Подводные лодки, хотя и составляли лишь около 2 процентов ВМС США, уничтожили более 30 процентов ВМС Японии, включая 8 авианосцев, 1 линкор и 11 крейсеров. Американские подводные лодки также уничтожили более 60 процентов японского торгового флота, подорвав способность Японии снабжать свои вооруженные силы и военные усилия. Подводные лодки союзников в войне на Тихом океане уничтожили больше японских кораблей, чем все остальные виды оружия вместе взятые. Этому подвигу в значительной степени способствовала неспособность Императорского флота Японии обеспечить адекватные силы сопровождения торгового флота страны.
Во время Второй мировой войны в составе ВМС США служило 314 подводных лодок, из них почти 260 были переброшены в Тихий океан. [37] Когда японцы атаковали Гавайи в декабре 1941 года, в эксплуатации находилось 111 лодок; 203 подводные лодки Gato , Balao и Tench классов За время войны в строй было введено . За время войны 52 подводные лодки США были потеряны по всем причинам, из них 48 - непосредственно из-за боевых действий. [38] Подводные лодки США потопили 1560 судов противника. [37] общим тоннажем 5,3 млн тонн (55% от общего количества потопленных). [39]
Служба подводных лодок Королевского военно-морского флота использовалась в основном в классической блокаде стран Оси . Основные районы ее деятельности располагались вокруг Норвегии, в Средиземноморье (против путей снабжения стран Оси в Северную Африку) и на Дальнем Востоке. В той войне британские подводные лодки потопили 2 миллиона тонн вражеских кораблей и 57 крупных военных кораблей, в том числе 35 подводных лодок. Среди них — единственный задокументированный случай, когда подводная лодка потопила другую подводную лодку, когда обе находились под водой. Это произошло, когда HMS Venturer вступил в бой с U-864 ; Экипаж Venturer вручную рассчитал успешное решение для стрельбы по трехмерно маневрирующей цели, используя методы, которые стали основой современных компьютерных систем наведения торпед. Семьдесят четыре британские подводные лодки были потеряны. [40] большинство, сорок два, в Средиземноморье.
Военные модели времен холодной войны


Первый пуск крылатой ракеты ( SSM-N-8 Regulus ) с подводной лодки произошёл в июле 1953 года с палубы USS Tunny , лодки флота времен Второй мировой войны, модифицированной для перевозки ракеты с ядерной боеголовкой . «Танни» и его родственная лодка «Барберо » были первыми патрульными подводными лодками США с ядерным сдерживанием. В 1950-х годах атомная энергетика частично заменила дизель-электрическую силовую установку. Также было разработано оборудование для извлечения кислорода из морской воды. Эти два нововведения дали подводным лодкам возможность оставаться под водой неделями или месяцами. [41] [42] Большинство подводных лодок, построенных с тех пор в США, Советском Союзе (ныне Россия), Великобритании и Франции, имели ядерный реактор .
В 1959–1960 годах первые подводные лодки с баллистическими ракетами были приняты на вооружение как США ( Джорджа Вашингтона класс ), так и Советского Союза ( класс Гольф ) в рамках времен Холодной войны стратегии ядерного сдерживания .
Во время Холодной войны США и Советский Союз содержали крупные подводные флоты, которые играли в кошки-мышки. За этот период Советский Союз потерял как минимум четыре подводные лодки: К-129 была потеряна в 1968 году (часть из которых ЦРУ извлекло со дна океана с помощью Говардом Хьюзом , спроектированного корабля Glomar Explorer ), К-8 в 1970 году, К-8 219 в 1986 году и «Комсомолец» в 1989 году (который установил рекорд глубины среди военных подводных лодок - 1000 м (3300 футов)). Многие другие советские подводные лодки, такие как К-19 (первая советская атомная подводная лодка и первая советская подводная лодка, достигшая Северного полюса), были серьезно повреждены пожаром или утечками радиации. За это время США потеряли две атомные подводные лодки: USS Thresher из-за отказа оборудования во время испытательного погружения на пределе своих возможностей и USS Skorpion по неизвестным причинам.
Во время индо-пакистанской войны 1971 года корабль Пакистана ВМС «Хангор» потопил индийский фрегат INS Khukri . Это было первое затопление подводной лодки со времен Второй мировой войны. [ нужна ссылка ] Во время той же войны » « Гази потопили подводную лодку класса «Тенч», предоставленную Пакистану в аренду у США, ВМС Индии . Это была первая боевая потеря подводной лодки со времен Второй мировой войны. [43] В 1982 году во время Фолклендской войны аргентинский крейсер «Генерал Бельграно» был потоплен британской подводной лодкой HMS Conqueror , что стало первой атомной подводной лодкой за всю войну. [44] Несколько недель спустя, 16 июня, во время Ливанской войны , безымянная израильская подводная лодка торпедировала и потопила ливанское каботажное судно «Транзит» . [45] которое перевозило 56 палестинских беженцев на Кипр , полагая, что судно эвакуировало антиизраильские ополченцы. Корабль был поражен двумя торпедами, сумел сесть на мель, но в итоге затонул. Погибло 25 человек, включая ее капитана. ВМС Израиля сообщили об инциденте в ноябре 2018 года. [46] [45]
Использование
Было предложено выделить этот раздел в другую статью под названием «Военная подводная лодка» . ( Обсудить ) (март 2024 г.) |
Военный


До и во время Второй мировой войны основной ролью подводных лодок была борьба с надводными кораблями. Подводные лодки будут атаковать либо на поверхности, используя палубные орудия, либо в подводном положении, используя торпеды . Они были особенно эффективны при потоплении трансатлантических судов союзников в обеих мировых войнах, а также в нарушении японских маршрутов снабжения и военно-морских операций в Тихом океане во Второй мировой войне.
Подводные лодки- минеры были разработаны в начале 20 века. Объект использовался во время обеих мировых войн. Подводные лодки также использовались для ввода и удаления тайных агентов и военных сил в специальных операциях , для сбора разведывательных данных и для спасения летных экипажей во время воздушных атак на острова, где летчикам сообщали о безопасных местах для аварийной посадки, чтобы подводные лодки могли их спасти. . Подводные лодки могли перевозить грузы через враждебные воды или выступать в качестве судов снабжения для других подводных лодок.
Подводные лодки обычно могли обнаружить и атаковать другие подводные лодки только на поверхности, хотя HMS Venturer сумел потопить U-864 четырьмя торпедами, пока обе находились под водой. Британцы еще в Первой мировой войне разработали специализированную противолодочную подводную лодку R. класса После Второй мировой войны, с развитием самонаводящихся торпед, более совершенных гидроакустических систем и ядерных силовых установок , подводные лодки также получили возможность эффективно охотиться друг за другом.
Развитие баллистических ракет подводных лодок и крылатых ракет подводных лодок дало подводным лодкам существенную и дальнюю способность атаковать как наземные, так и морские цели с использованием различных видов оружия, от кассетных бомб до ядерного оружия .
Основная защита подводной лодки заключается в ее способности оставаться незамеченной в глубинах океана. Первые подводные лодки можно было обнаружить по издаваемому ими звуку. Вода является отличным проводником звука (намного лучше, чем воздух), а подводные лодки могут обнаруживать и отслеживать сравнительно шумные надводные корабли на больших расстояниях. Современные подводные лодки строятся с упором на малозаметность . Усовершенствованная конструкция гребных винтов , широкая звукоизоляция и специальное оборудование помогают подводной лодке оставаться такой же тихой, как окружающий шум океана, что затрудняет их обнаружение. Для обнаружения и нападения на современные подводные лодки требуются специальные технологии.

Активный гидролокатор использует отражение звука, излучаемого поисковой аппаратурой, для обнаружения подводных лодок. Он использовался со времен Второй мировой войны надводными кораблями, подводными лодками и самолетами (с помощью сбрасываемых буев и «погружающихся» вертолетных групп), но он показывает положение излучателя и поддается противодействию.
Скрытая военная подводная лодка представляет собой реальную угрозу и из-за своей скрытности может заставить вражеский флот тратить ресурсы на поиск больших территорий океана и защиту кораблей от нападения. Это преимущество было наглядно продемонстрировано в Фолклендской войне 1982 года , когда британская атомная подводная лодка HMS Conqueror потопила аргентинский крейсер «Генерал Бельграно» . После затопления ВМС Аргентины осознали, что у них нет эффективной защиты от нападения подводных лодок, и надводный флот Аргентины отошел в порт на оставшуюся часть войны. Однако аргентинская подводная лодка осталась в море. [48]
Гражданский
Хотя большинство подводных лодок в мире являются военными, есть и гражданские подводные лодки, которые используются для туризма, разведки, инспекций нефтяных и газовых платформ и обследований трубопроводов. Некоторые из них также используются в незаконной деятельности.
Аттракцион «Путешествие на подводной лодке» открылся в Диснейленде в 1959 году, но, хотя он проходил под водой, это не была настоящая подводная лодка, поскольку она двигалась по рельсам и была открыта для атмосферы. [49] Первой туристической подводной лодкой был Auguste Piccard , вошедший в строй в 1964 году на выставке Expo64 . [50] К 1997 году в мире действовало 45 туристических подводных лодок. [51] Подводные лодки с глубиной затопления в диапазоне 400–500 футов (120–150 м) эксплуатируются в нескольких районах мира, обычно с глубиной дна от 100 до 120 футов (от 30 до 37 м) и грузоподъемностью от 50 до 100 м. пассажиры.
При типичной операции надводное судно доставляет пассажиров в морскую зону и загружает их на подводную лодку. Затем подводная лодка посещает подводные достопримечательности, такие как естественные или искусственные рифовые сооружения. Для безопасного всплытия без опасности столкновения местоположение подводной лодки маркируется выпуском воздуха, а движение на поверхность координируется наблюдателем на плавсредстве обеспечения.
так называемых наркоподводных лодок, чтобы избежать обнаружения правоохранительными органами. Недавним событием стало использование южноамериканскими контрабандистами наркотиков [52] Хотя они иногда используют настоящие подводные лодки , большинство из них являются самоходными полупогружными лодками , где часть корабля все время остается над водой. В сентябре 2011 года колумбийские власти конфисковали 16-метровую подводную лодку, вмещающую экипаж из пяти человек, стоимостью около 2 миллионов долларов. Судно принадлежало повстанцам FARC и могло перевозить не менее 7 тонн наркотиков. [53]
- Гражданские подводные лодки
 Модель мезоскафа Огюста Пиккара
Модель мезоскафа Огюста Пиккара Интерьер туристической подводной лодки «Атлантис» во время погружения
Интерьер туристической подводной лодки «Атлантис» во время погружения Туристическая подводная лодка Атлантис
Туристическая подводная лодка Атлантис



Полярные операции

- 1903 — на озере Саймон подводная лодка «Протектор» всплыла сквозь лед у берегов Ньюпорта, штат Род-Айленд . [54]
- 1930 г. — военный корабль США О-12 действовал подо льдом недалеко от Шпицбергена . [54]
- 1937 — советская подводная лодка «Красногвардеец» действовала подо льдом в Датском проливе . [54]
- 1941–45 — немецкие подводные лодки действовали подо льдом от Баренцева моря до моря Лаптевых . [54]
- 1946 - Военный корабль США Атуле использовал эхолот с восходящим лучом в операции «Нанук» в проливе Дэвиса . [54]
- 1946–47 - Военный корабль США « Сеннет» использовал подольдовый гидролокатор в операции «Прыжок в высоту» в Антарктике. [54]
- 1947 - Военный корабль США Boarfish применил эхолот с восходящим лучом подо паковым льдом в Чукотском море . [54]
- 1948 г. - на авианосце США «Карп» разработаны методы вертикальных подъемов и спусков по полыньям Чукотского моря. [54]
- 1952 - Военный корабль США Redfish использовал расширенную группу эхолотов с восходящим лучом в море Бофорта . [54]
- 1957 г. - военный корабль США «Наутилус» достиг 87 градусов северной широты возле Шпицбергена. [54]
- 3 августа 1958 г. - «Наутилус» с помощью инерциальной навигационной системы достиг Северного полюса. [54]
- 17 марта 1959 г. - военный корабль США «Скейт» всплыл сквозь лед на северном полюсе. [54]
- 1960 г. - военный корабль США « Сарго» прошел подо льдом 900 миль (1400 км) по мелководному (от 125 до 180 футов или глубине от 38 до 55 метров) Берингово-Чукотскому шельфу. [54]
- 1960 г. - военный корабль США «Сидрагон» прошел Северо-Западным проходом подо льдом. [54]
- 1962 г. - советская класса «Ноябрь» подводная лодка К-3 «Ленинский комсомол» достигла Северного полюса. [54]
- 1970 г. - военный корабль США «Куинфиш» провел обширное подводное картографирование сибирского континентального шельфа. [55]
- 1971 – HMS Dreadnought достиг Северного полюса. [54]
- Военный корабль США «Гурнард» провел три полярных учения: 1976 год (с американским актером Чарльтоном Хестоном на борту); 1984 г. совместные операции с авианосцем « Пинтадо» ; и совместные учения 1990 года с военным кораблем США « Сихорс» . [56]
- 6 мая 1986 года — авианосцы USS Ray , USS Archerfish и USS Hawkbill встречаются и всплывают вместе на географическом Северном полюсе . Первое всплытие трёх подводных лодок на полюс. [57]
- 19 мая 1987 г. - HMS Superb присоединился к военным кораблям USS Billfish и USS Sea Devil на Северном полюсе. [58]
- Март 2007 г. - военный корабль США «Александрия» принял участие в совместных ледовых учениях ВМС США и Королевского флота 2007 (ICEX-2007) в Северном Ледовитом океане с «Трафальгар» класса подводной лодкой HMS Tireless . [59]
- Март 2009 г. - военный корабль США Аннаполис принял участие в ледовых учениях 2009 по проверке работоспособности и боеспособности подводных лодок в арктических условиях. [60]
Технология
Плавучесть и дифферент

Все надводные корабли, а также надводные подводные лодки находятся в состоянии положительной плавучести и весят меньше, чем объем воды, который они вытеснили бы при полном погружении. Для гидростатического погружения корабль должен иметь отрицательную плавучесть либо за счет увеличения собственного веса, либо за счет уменьшения водоизмещения. Чтобы контролировать свое водоизмещение и вес, на подводных лодках имеются балластные цистерны , которые могут вмещать различное количество воды и воздуха. [61]
Для общего погружения или всплытия на подводных лодках используются главные балластные цистерны (ОБТ), которые представляют собой цистерны под давлением окружающей среды, заполненные водой для погружения или воздухом для поднятия на поверхность. В подводном положении ОБТ, как правило, остаются затопленными, что упрощает их конструкцию. [61] а на многих ПЛ эти баки представляют собой участок пространства между лёгким корпусом и прочным корпусом. Для более точного контроля глубины на подводных лодках используются резервуары контроля глубины (DCT) меньшего размера, также называемые жесткими резервуарами (из-за их способности выдерживать более высокое давление) или триммерными резервуарами. Это сосуды под давлением с переменной плавучестью , разновидность устройства контроля плавучести. Количество воды в резервуарах контроля глубины можно регулировать для гидростатического изменения глубины или для поддержания постоянной глубины при изменении внешних условий (в основном плотности воды). [61] подводной лодки Баки контроля глубины могут быть расположены либо рядом с центром тяжести , чтобы минимизировать влияние на дифферент, либо разделены по длине корпуса, чтобы их также можно было использовать для регулировки статического дифферента путем перекачки воды между ними.
В подводном положении давление воды на корпус подводной лодки может достигать 4 МПа (580 фунтов на квадратный дюйм ) для стальных подводных лодок и до 10 МПа (1500 фунтов на квадратный дюйм) для титановых подводных лодок, таких как К-278 «Комсомолец» , при этом внутреннее давление остается относительно неизменным. Эта разница приводит к сжатию корпуса, что уменьшает водоизмещение. Плотность воды также незначительно увеличивается с глубиной, поскольку соленость и давление выше. [62] Это изменение плотности не полностью компенсирует сжатие корпуса, поэтому плавучесть уменьшается с увеличением глубины. Затопленная подводная лодка находится в неустойчивом равновесии и имеет тенденцию либо тонуть, либо всплывать на поверхность. Поддержание постоянной глубины требует непрерывной работы либо резервуаров контроля глубины, либо поверхностей управления. [63] [64]
Подводные лодки в состоянии нейтральной плавучести по своей природе не обладают дифферентной устойчивостью. Для поддержания желаемой продольной дифферента на подводных лодках используются баки носовой и кормовой дифферентовки. Насосы перемещают воду между резервуарами, изменяя распределение веса и наклоняя сабвуфер вверх или вниз. Аналогичная система может использоваться для поддержания поперечной дифферента. [61]
Поверхности управления

Гидростатический эффект цистерн переменного балласта — не единственный способ управления подводной лодкой под водой. Гидродинамическое маневрирование осуществляется с помощью нескольких управляющих поверхностей, известных под общим названием пикирующие самолеты или гидропланы, которые можно перемещать для создания гидродинамических сил, когда подводная лодка движется в продольном направлении с достаточной скоростью. В классической крестообразной конфигурации кормы горизонтальные кормовые плоскости служат той же цели, что и дифферентные баки, контролируя дифферент. Большинство подводных лодок дополнительно имеют передние горизонтальные плоскости, которые до 1960-х годов обычно располагались на носу, но в более поздних конструкциях часто находились на парусах, где они расположены ближе к центру тяжести и могут контролировать глубину с меньшим влиянием на дифферент. [65]
Очевидный способ настройки поверхностей управления на корме подводной лодки — использовать вертикальные плоскости для управления рысканием и горизонтальные плоскости для управления тангажем, что придает им форму креста, если смотреть с кормы судна. В этой конфигурации, которая долгое время оставалась доминирующей, горизонтальные плоскости используются для управления дифферентом и глубиной, а вертикальные плоскости — для управления боковыми маневрами, как руль направления надводного корабля.
В качестве альтернативы задние рулевые поверхности можно объединить в так называемую X-корму или X-руль направления. Хотя такая конфигурация и менее интуитивно понятна, она имеет несколько преимуществ по сравнению с традиционной крестообразной компоновкой. Во-первых, это улучшает маневренность как по горизонтали, так и по вертикали. [ нужны разъяснения ] Во-вторых, снижается вероятность повреждения рулевых поверхностей при приземлении на морское дно или отрыве от него, а также при швартовке и отшвартовке у него. Наконец, это безопаснее, поскольку одна из двух диагональных линий может противодействовать другой как в вертикальном, так и в горизонтальном направлении, если одна из них случайно застрянет. [66] [ нужны разъяснения ]

X-корма впервые была опробована на практике в начале 1960-х годов на USS Albacore экспериментальной подводной лодке ВМС США . Хотя эта схема была признана выгодной, она, тем не менее, не использовалась на последующих подводных лодках американского производства из-за того, что она требует использования компьютера для манипулирования поверхностями управления для достижения желаемого эффекта. [67] Вместо этого первым, кто применил X-образную корму в стандартных операциях, был шведский военно-морской флот с Sjöormen классом , головная подводная лодка которого была спущена на воду в 1967 году, еще до того, как « Альбакор» завершил свои испытания. [68] Поскольку на практике это оказалось очень хорошо работать, все последующие классы шведских подводных лодок ( класс Näcken , Västergötland , Gotland и Blekinge ) имеют или будут оснащаться х-рулем направления.

Верфь Kockums, ответственная за разработку X-кормы шведских подводных лодок, в конечном итоге экспортировала ее в Австралию с Collins классом , а также в Японию с Sōryū классом . С появлением типа 212 он также стал использоваться в ВМС Германии и Италии. ВМС США с «Колумбия» классом , ВМС Великобритании с «Дредноут» классом и ВМС Франции с «Барракуда» классом собираются присоединиться к семейству X-Stern. Следовательно, судя по ситуации начала 2020-х годов, x-stern вот-вот станет доминирующей технологией.
При аварийном всплытии подводной лодки одновременно используются все методы управления глубиной и дифферентом. [ нужна ссылка ] вместе с движением лодки вверх. Такое всплытие происходит очень быстро, поэтому судно может даже частично выпрыгнуть из воды, потенциально повредив системы подводной лодки. [ нужны разъяснения ]
Халл
Обзор

Современные подводные лодки имеют сигарообразную форму. Эту конструкцию, также использовавшуюся в самых ранних подводных лодках, иногда называют « каплевидным корпусом ». Он снижает гидродинамическое сопротивление , когда лодка находится под водой, но снижает мореходные качества и увеличивает сопротивление в надводном положении. Поскольку ограничения двигательных установок первых подводных лодок вынуждали их большую часть времени работать в надводном положении, конструкция их корпусов была компромиссом. Из-за низкой скорости этих подводных лодок под водой, обычно значительно ниже 10 узлов (18 км/ч), повышенное сопротивление при подводном движении было приемлемым. В конце Второй мировой войны, когда технологии позволили быстрее и дольше работать под водой, а усиленное наблюдение с самолетов вынудило подводные лодки оставаться под водой, конструкция корпуса снова стала каплевидной, чтобы уменьшить сопротивление и шум. USS Albacore (AGSS-569) была уникальной исследовательской подводной лодкой, которая стала пионером американской версии каплевидной формы корпуса (иногда называемой «корпусом Albacore») современных подводных лодок. На современных военных подводных лодках внешний корпус покрыт слоем звукопоглощающей резины или безэховое покрытие , чтобы уменьшить обнаружение.
Занятые прочные корпуса глубоководных подводных лодок, таких как DSV Alvin, имеют сферическую, а не цилиндрическую форму. Это обеспечивает более равномерное распределение напряжения и эффективное использование материалов, способных противостоять внешнему давлению, поскольку обеспечивает наибольший внутренний объем для веса конструкции и является наиболее эффективной формой, позволяющей избежать нестабильности изгиба при сжатии. К внешней стороне прочного корпуса обычно прикрепляется рама, обеспечивающая крепление систем балласта и дифферента, научных приборов, аккумуляторных блоков, синтаксической плавучей пены и освещения.
Поднятая башня на вершине стандартной подводной лодки вмещает перископ и мачты электроники, которые могут включать в себя радио, радар , радиоэлектронную борьбу и другие системы. Он также может включать в себя мачту для сноркелинга. На многих ранних классах подводных лодок (см. историю) рубка управления, или «конн», располагалась внутри этой башни, известной как « боевая рубка ». С тех пор конн размещался внутри корпуса подводной лодки, а башню теперь называют «парусом» или «плавником» . Конн отличается от «мостика», небольшой открытой платформы в верхней части паруса, используемой для наблюдения во время надводных операций.
«Ванны» родственны боевым рубкам, но используются на подводных лодках меньшего размера. Ванна представляет собой металлический цилиндр, окружающий люк, который не дает волнам проникнуть прямо в кабину. Он нужен потому, что надводные подводные лодки имеют ограниченный надводный борт , то есть низко залегают в воде. Ванны помогают предотвратить затопление судна.
Одинарные и двойные корпуса

Современные подводные лодки и подводные аппараты, как и самые ранние модели, обычно имеют одинарный корпус. Большие подводные лодки обычно имеют дополнительный корпус или секции корпуса снаружи. Этот внешний корпус, который фактически образует форму подводной лодки, называется внешним корпусом ( корпус в Королевском флоте) или легким корпусом , поскольку ему не приходится выдерживать перепад давления. Внутри внешнего корпуса находится прочный корпус, или прочный корпус , выдерживающий давление моря и имеющий внутри нормальное атмосферное давление.
Еще во время Первой мировой войны стало понятно, что оптимальная форма, позволяющая выдерживать давление, противоречит оптимальной форме, обеспечивающей мореходность и минимальное сопротивление на поверхности, а трудности строительства еще больше усложнили проблему. Эту проблему решали либо компромиссной формой, либо применением двухслойного корпуса: внутреннего прочного корпуса для выдерживания давления и внешнего обтекателя для гидродинамической формы. До конца Второй мировой войны большинство подводных лодок имели дополнительный частичный кожух сверху, в носу и корме, сделанный из более тонкого металла, который при погружении затоплялся. Германия пошла дальше, выпустив Тип XXI , общего предшественника современных подводных лодок, у которых прочный корпус был полностью заключен внутри легкого корпуса, но оптимизирован для подводного плавания, в отличие от более ранних конструкций, оптимизированных для надводных операций.
После Второй мировой войны подходы раскололись. Советский Союз изменил свои конструкции, взяв за основу немецкие разработки. Все тяжелые советские и российские подводные лодки после Второй мировой войны имеют двухкорпусную конструкцию. Американские и большинство других западных подводных лодок перешли на преимущественно однокорпусный подход. Они по-прежнему имеют легкие секции корпуса в носовой и кормовой части, в которых размещены главные балластные цистерны и обеспечивают гидродинамически оптимизированную форму, однако основная цилиндрическая секция корпуса имеет только один слой обшивки. В Соединенных Штатах для будущих подводных лодок рассматривают возможность использования двойного корпуса для улучшения грузоподъемности, скрытности и дальности полета. [69]
Прочный корпус

Прочный корпус, как правило, построен из толстой высокопрочной стали, имеет сложную конструкцию и высокий запас прочности и разделен водонепроницаемыми переборками на несколько отсеков . Есть также примеры более чем двух корпусов на подводной лодке, как, например, класс «Тайфун» , который имеет два основных прочных корпуса и три меньших для рубки управления, торпед и рулевого управления, с системой запуска ракет между основными корпусами, все окружены и окружены. поддерживается внешним легким гидродинамическим корпусом. В погруженном состоянии прочный корпус обеспечивает большую часть плавучести всего судна.
Глубину погружения невозможно легко увеличить. Простое увеличение толщины корпуса увеличивает вес конструкции и требует уменьшения веса бортового оборудования, а увеличение диаметра требует пропорционального увеличения толщины для того же материала и архитектуры, что в конечном итоге приводит к тому, что прочный корпус не обладает достаточной плавучестью, чтобы поддерживать собственную плавучесть. вес, как у батискафа . Это приемлемо для гражданских исследовательских подводных лодок, но не для военных подводных лодок, которым для выполнения своих функций необходимо нести большое количество оборудования, экипажа и вооружения. конструкционные материалы с большей удельной прочностью и удельным модулем Необходимы .
Подводные лодки Первой мировой войны имели корпуса из углеродистой стали с максимальной глубиной 100 метров (330 футов). Во время Второй мировой войны была внедрена высокопрочная легированная сталь, позволяющая погружаться на глубину 200 метров (660 футов). Высокопрочная легированная сталь сегодня остается основным материалом для подводных лодок с глубиной 250–400 метров (820–1310 футов), которую невозможно превысить на военной подводной лодке без конструктивных компромиссов. Чтобы превысить этот предел, несколько подводных лодок были построены с титановыми корпусами. Титановые сплавы могут быть прочнее стали, легче и, что наиболее важно, иметь более высокую удельную прочность в погруженном состоянии и удельный модуль упругости . Титан также не ферромагнитен , что важно для малозаметности. Титановые подводные лодки были построены Советским Союзом, который разработал специализированные высокопрочные сплавы. Выпустило несколько типов титановых подводных лодок. Титановые сплавы позволяют значительно увеличить глубину, но другие системы должны быть перепроектированы, чтобы справиться с этой задачей, поэтому глубина испытаний была ограничена 1000 метрами (3300 футов) для советской подводной лодки К-278 «Комсомолец» , самой глубоководной боевой подводной лодки. Ан Подводная лодка класса «Альфа», возможно, успешно действовала на высоте 1300 метров (4300 футов). [70] хотя непрерывная работа на таких глубинах могла бы вызвать чрезмерную нагрузку на многие системы подводных лодок. Титан не так легко изгибается, как сталь, и может стать хрупким после многих циклов погружений. Несмотря на преимущества, высокая стоимость титановой конструкции привела к отказу от строительства титановых подводных лодок после окончания холодной войны. Глубоководные гражданские подводные лодки используют толстые акриловые прочные корпуса. Хотя удельная прочность и удельный модуль акрила не очень высоки, плотность составляет всего 1,18 г/см. 3 , поэтому он лишь немного плотнее воды, и штраф за плавучесть из-за увеличения толщины соответственно невелик.
Самый глубокий глубоководный аппарат (ДСВ) на сегодняшний день — «Триест» . 5 октября 1959 года «Триест» отправился из Сан-Диего на Гуам на борту грузового судна «Санта-Мария» для участия в проекте «Нектон» — серии очень глубоких погружений в Марианской впадине . 23 января 1960 года «Триест» достиг дна океана в Бездне Челленджера (самая глубокая южная часть Марианской впадины), на борту находились Жак Пиккар (сын Огюста) и лейтенант Дон Уолш , ВМС США. [71] Это был первый раз, когда судно с экипажем или без экипажа достигло самой глубокой точки земного океана. Бортовые системы показали глубину 11 521 метр (37 799 футов), хотя позже она была изменена до 10 916 метров (35 814 футов), а более точные измерения, проведенные в 1995 году, показали, что Бездна Челленджера немного мельче - 10 911 метров (35 797 футов).
Построить прочный корпус сложно, поскольку он должен выдерживать давление на необходимой глубине погружения. Когда корпус имеет идеально круглое поперечное сечение, давление распределяется равномерно и вызывает только сжатие корпуса. Если форма не идеальна, корпус в некоторых местах прогибается сильнее, и нестабильность устойчивости является обычным видом отказа . Неизбежным незначительным отклонениям противодействуют кольца жесткости, но даже отклонение от круглости на один дюйм (25 мм) приводит к более чем 30-процентному снижению максимальной гидростатической нагрузки и, следовательно, глубины погружения. [72] Поэтому корпус должен быть построен с высокой точностью. Все детали корпуса должны быть сварены без дефектов, а все соединения многократно проверены разными методами, что обусловливает высокую стоимость современных подводных лодок. (Например, каждая «Вирджиния» класса ударная подводная лодка стоит 2,6 миллиарда долларов США , то есть более 200 000 долларов США за тонну водоизмещения.)
Движение

Первые подводные лодки приводились в движение людьми. Первой подводной лодкой с механическим приводом была французская «Плонжер» 1863 года , в которой в качестве двигателя использовался сжатый воздух. Анаэробная двигательная установка была впервые использована на испанском корабле «Иктинео II» в 1864 году, который использовал раствор цинка , диоксида марганца и хлората калия для выработки достаточного тепла для питания парового двигателя, а также для обеспечения кислорода для экипажа. Подобная система не использовалась снова до 1940 года, когда ВМС Германии испытали систему на основе перекиси водорода , Вальтера турбину , на экспериментальной подводной лодке V-80 , а затем на военно-морских подводных лодках U-791 и типа XVII ; [73] Система была доработана для британского Explorer класса , завершенного в 1958 году. [74]
До появления атомных морских силовых установок на большинстве подводных лодок 20-го века использовались электродвигатели и аккумуляторы для работы под водой и двигатели внутреннего сгорания на поверхности, а также для подзарядки аккумуляторов. На ранних подводных лодках использовались бензиновые (бензиновые) двигатели, но они быстро уступили место керосину (парафину), а затем и дизельным двигателям из-за пониженной воспламеняемости, а с дизельным двигателем улучшилась топливная экономичность и, следовательно, увеличилась дальность полета. Комбинация дизельной и электрической силовой установки стала нормой.
Первоначально двигатель внутреннего сгорания и электродвигатель в большинстве случаев были соединены с одним и тем же валом, так что оба могли напрямую приводить в движение гребной винт. Двигатель внутреннего сгорания размещался в передней части кормовой части, за ним располагался электродвигатель, за ним следовал гребной вал. Двигатель был соединен с мотором муфтой, а мотор, в свою очередь, соединен с карданным валом другой муфтой.
При включенном только заднем сцеплении электродвигатель мог приводить в движение гребной винт, что необходимо для работы под полным погружением. При включении обоих сцеплений двигатель внутреннего сгорания мог приводить в движение гребной винт, что было возможно при работе на поверхности или, на более позднем этапе, при подводном плавании. Электродвигатель в этом случае будет служить генератором для зарядки аккумуляторов или, если зарядка не потребуется, будет иметь возможность свободно вращаться. Когда включено только переднее сцепление, двигатель внутреннего сгорания может приводить в действие электродвигатель в качестве генератора для зарядки аккумуляторов, не заставляя одновременно двигаться пропеллер.
Двигатель мог иметь несколько якорей на валу, которые могли быть электрически соединены последовательно для низкой скорости и параллельно для высокой скорости (эти соединения назывались «группа вниз» и «группа вверх» соответственно).
Дизель-электрическая трансмиссия

Хотя в большинстве ранних подводных лодок использовалась прямая механическая связь между двигателем внутреннего сгорания и гребным винтом, альтернативное решение рассматривалось и было реализовано на очень ранней стадии. [75] Это решение состоит в том, чтобы сначала преобразовать работу двигателя внутреннего сгорания в электрическую энергию с помощью специального генератора. Эта энергия затем используется для приведения в движение пропеллера с помощью электродвигателя и, при необходимости, для зарядки аккумуляторов. Таким образом, в этой конфигурации электродвигатель постоянно отвечает за приведение в движение воздушного винта, независимо от того, доступен ли воздух, чтобы можно было также использовать двигатель внутреннего сгорания или нет.
Среди пионеров этого альтернативного решения была самая первая подводная лодка Швеции ВМС HMS Hajen (позже переименованная в Ub no 1 ), спущенная на воду в 1904 году. Хотя ее конструкция в целом была вдохновлена первой подводной лодкой, введенной в эксплуатацию ВМС США, USS Holland , он отличался от последнего по крайней мере в трех существенных отношениях: добавлением перископа, заменой бензинового двигателя полудизельным двигателем ( двигатель с горячей лампой, изначально предназначенный для работы на керосине, позже замененный настоящим дизельным двигателем) и разрывая механическую связь между двигателем внутреннего сгорания и гребным винтом, позволяя вместо этого первому приводить в действие специальный генератор. [76] Тем самым она сделала три важных шага на пути к тому, что в конечном итоге стало доминирующей технологией для обычных (то есть неатомных) подводных лодок.

В последующие годы ВМС Швеции добавили еще семь подводных лодок трех разных классов ( 2-й класс , Лаксен класс и Браксен класс ), использующих ту же технологию двигательной установки, но с самого начала оснащенных настоящими дизельными двигателями, а не полудизельными двигателями. [77] Поскольку к тому времени технология обычно основывалась на дизельном двигателе, а не на каком-либо другом типе двигателя внутреннего сгорания, в конечном итоге она стала известна как дизель-электрическая трансмиссия .
Как и многие другие ранние подводные лодки, первоначально спроектированные в Швеции, были довольно небольшими (менее 200 тонн) и поэтому ограничивались прибрежными операциями. Когда ВМС Швеции захотели пополнить свои запасы более крупными судами, способными действовать дальше от берега, их конструкции были закуплены у зарубежных компаний, уже имевших необходимый опыт: сначала итальянских ( «Фиат - Лауренти» ), а позднее немецких ( «AG Weser» и «IvS» ). [78] В качестве побочного эффекта от дизель-электрической трансмиссии временно отказались.
Однако дизель-электрическая трансмиссия была немедленно вновь введена в эксплуатацию, когда в середине 1930-х годов Швеция снова начала проектировать свои собственные подводные лодки. С этого момента он последовательно использовался для всех новых классов шведских подводных лодок, хотя и дополнялся воздухонезависимой силовой установкой (AIP), обеспечиваемой двигателями Стирлинга, начиная с HMS Näcken в 1988 году. [79]

Еще одним ранним пользователем дизель-электрической трансмиссии был ВМС США , чье инженерное бюро предложило ее использование в 1928 году. Впоследствии она была опробована на подводных лодках S-класса S-3 , S-6 и S-7, прежде чем была запущена в производство. с «Морская свинья» классом 1930-х годов. С этого момента он продолжал использоваться на большинстве обычных подводных лодок США. [80]
За исключением британских подводных лодок класса U и некоторых подводных лодок Императорского флота Японии, которые использовали отдельные дизель-генераторы для движения на малых скоростях, лишь немногие военно-морские силы, за исключением военно-морских сил Швеции и США, до 1945 года широко использовали дизель-электрическую трансмиссию. [80] Напротив, после Второй мировой войны он постепенно стал доминирующим способом движения для обычных подводных лодок. Однако его принятие не всегда было быстрым. Примечательно, что советский ВМФ не использовал дизель-электрическую трансмиссию на своих обычных подводных лодках до 1980 года ( «Палтус») класс . [81]
Если бы дизель-электрическая трансмиссия приносила только преимущества, а не недостатки по сравнению с системой, механически соединяющей дизель с воздушным винтом, она, несомненно, стала бы доминирующей гораздо раньше. К недостаткам можно отнести следующее: [82] [83]
- Это влечет за собой потерю топливной эффективности, а также мощности из-за преобразования мощности дизельного двигателя в электричество. Хотя известно, что и генераторы, и электродвигатели очень эффективны, их эффективность, тем не менее, не достигает 100 процентов.
- Для этого требуется дополнительный компонент в виде специального генератора. Поскольку электродвигатель всегда используется для привода гребного винта, он больше не может выполнять функции генератора.
- Он не позволяет дизельному двигателю и электродвигателю объединять усилия, одновременно приводя гребной винт в механический режим на максимальную скорость, когда подводная лодка всплывает или ныряет с маской и трубкой. Однако это может не иметь большого практического значения, поскольку вариант, который он предотвращает, ставит подводную лодку под угрозу погружения с частично разряженными батареями.
Причина, по которой дизель-электрическая трансмиссия стала доминирующей альтернативой, несмотря на эти недостатки, заключается, конечно же, в том, что она также имеет множество преимуществ, и в конечном итоге они оказались более важными. К преимуществам относятся следующие: [82] [83]
- Он снижает внешний шум за счет разрыва прямой и жесткой механической связи между относительно шумным дизельным двигателем(ами) с одной стороны и гребным валом(ами) и корпусом с другой. Поскольку скрытность имеет первостепенное значение для подводных лодок, это очень существенное преимущество.
- Это повышает готовность к погружению , что для подводной лодки, конечно, жизненно важно. Единственное, что требуется с точки зрения двигательной установки, — это выключить дизель(-а).
- Это делает скорость дизельного двигателя(ов) временно независимой от скорости подводной лодки. Это, в свою очередь, часто позволяет эксплуатировать дизель(-а) на скорости, близкой к оптимальной с точки зрения топливной эффективности, а также долговечности. Это также позволяет сократить время, затрачиваемое на всплытие или подводное плавание, за счет работы дизеля (дизелей) на максимальной скорости, не влияя на скорость самой подводной лодки.
- Это устраняет необходимость в муфтах, которые иначе необходимы для соединения дизельного двигателя, электродвигателя и карданного вала. Это, в свою очередь, экономит место, повышает надежность и снижает затраты на техническое обслуживание.
- Это повышает гибкость в отношении конфигурации, расположения и обслуживания компонентов трансмиссии. Например, дизель больше не нужно выравнивать с электродвигателем и карданным валом, два дизеля можно использовать для питания одного гребного винта (или наоборот), а один дизель можно отключить для технического обслуживания, пока второй остается в рабочем состоянии. возможность обеспечить необходимое количество электроэнергии.
- Это облегчает интеграцию дополнительных первичных источников энергии, помимо дизельных двигателей, таких как различные виды воздухонезависимых энергетических систем (AIP). Поскольку один или несколько электродвигателей всегда приводят в движение пропеллер(ы), такие системы можно легко использовать в качестве еще одного источника электрической энергии в дополнение к дизельному двигателю(ям) и батареям.
трубка

Во время Второй мировой войны немцы экспериментировали с идеей шнорхеля ( трубки) с захваченных голландских подводных лодок, но не увидели в них необходимости до самого конца войны. Шнорхель представляет собой выдвижную трубу, которая подает воздух в дизельные двигатели, находясь под водой на перископной глубине , что позволяет лодке путешествовать и перезаряжать батареи, сохраняя при этом определенную степень скрытности.
Однако, особенно после первой реализации, это оказалось далеко не идеальным решением. Были проблемы с заклиниванием или закрытием клапана устройства во время погружения в ненастную погоду. Поскольку в качестве буфера система использовала весь прочный корпус, дизели мгновенно высасывали огромные объемы воздуха из отсеков лодки, а экипаж часто получал болезненные травмы ушей. Скорость была ограничена 8 узлами (15 км/ч), чтобы устройство не сломалось от напряжения. Шнорхель также создавал шум, из- за которого лодку было легче обнаружить с помощью гидролокатора, но бортовому гидролокатору было сложнее обнаруживать сигналы от других судов. Наконец, радары союзников в конечном итоге стали достаточно совершенными, чтобы мачту шнорхеля можно было обнаружить за пределами видимости. [84]
Хотя трубка делает подводную лодку гораздо менее заметной, она не идеальна. В ясную погоду выхлопы дизеля можно увидеть на поверхности на расстоянии около трех миль. [85] в то время как «перо перископа» (волна, создаваемая трубкой или перископом, движущимся по воде) видно издалека в спокойных морских условиях. Современный радар также способен обнаружить трубку в спокойных морских условиях. [86]

Проблема дизелей, вызывающих вакуум в подводной лодке, когда головной клапан погружен в воду, все еще существует в дизельных подводных лодках более поздних моделей, но ее смягчают датчики отключения высокого вакуума, которые отключают двигатели, когда вакуум в корабле достигает заданного уровня. заданная точка. Современные индукционные мачты для сноркелинга имеют надежную конструкцию, в которой используется сжатый воздух , управляемый простой электрической схемой, который удерживает «головной клапан» открытым против натяжения мощной пружины. Морская вода, омывающая мачту, замыкает открытые электроды наверху, нарушая управление и закрывая «головной клапан», пока мачта находится под водой. Подводные лодки США не использовали трубки до окончания Второй мировой войны. [87]
Воздухонезависимая двигательная установка


Во время Второй мировой войны немецкие подводные лодки типа XXI (также известные как « Электробуте ») были первыми подводными лодками, предназначенными для работы под водой в течение длительного времени. Первоначально они должны были нести перекись водорода для длительного и быстрого независимого от воздуха движения, но в конечном итоге вместо этого были построены с очень большими батареями. В конце войны британцы и Советы экспериментировали с двигателями, работающими на перекиси водорода/керосине (парафине), которые могли работать как на поверхности, так и под водой. Результаты не были обнадеживающими. Хотя Советский Союз использовал класс подводных лодок с этим типом двигателя (под кодовым названием Квебек НАТО « »), они были признаны неудачными.
Соединенные Штаты также использовали перекись водорода в экспериментальной лодке сверхмалой подводной X-1 . Первоначально он приводился в движение перекисью водорода / дизельным двигателем и аккумуляторной системой до взрыва ее запаса перекиси водорода 20 мая 1957 года. Позже X-1 был переоборудован для использования дизель-электрического привода. [88]
Сегодня несколько военно-морских сил используют воздушно-независимые силовые установки. В частности, использует технологию Стирлинга на Gotland подводных лодках класса и Södermanland Швеция . Двигатель Стирлинга нагревается за счет сжигания дизельного топлива с жидким кислородом из криогенных баков. Новейшей разработкой воздухонезависимой силовой установки являются водородные топливные элементы , впервые использованные на немецкой подводной лодке Тип 212 , с девятью ячейками по 34 кВт или двумя ячейками по 120 кВт. Топливные элементы также используются на новых испанских подводных лодках класса S-80, хотя топливо хранится в виде этанола, а затем перед использованием преобразуется в водород. [89]
Одна из новых технологий, которая внедряется начиная с одиннадцатой Сорю подводной лодки класса (JS Орю ) ВМС Японии, представляет собой более современную литий-ионную батарею . Эти батареи имеют примерно вдвое больший запас электроэнергии, чем традиционные батареи, и за счет замены свинцово-кислотных батарей в их обычных местах хранения, а также заполнения большого пространства корпуса, обычно отведенного для двигателя AIP и топливных баков, многими тоннами литий-ионных батарей, современные подводные лодки фактически могут вернуться к «чистой» дизель-электрической конфигурации, но при этом иметь дополнительную дальность подводного плавания и мощность, обычно связанные с подводными лодками, оснащенными AIP. [ нужна ссылка ]
Атомная энергетика

Паровая энергетика была возрождена в 1950-х годах с появлением паровой турбины с ядерной установкой, приводящей в движение генератор. Благодаря устранению потребности в атмосферном кислороде время, в течение которого подводная лодка могла оставаться под водой, ограничивалось только ее запасами продовольствия, поскольку воздух для дыхания использовался повторно, а пресная вода дистиллировалась из морской воды. Что еще более важно, атомная подводная лодка имеет неограниченную дальность полета на максимальной скорости. Это позволяет ему добраться от своей оперативной базы до зоны боевых действий за гораздо более короткое время и делает его гораздо более сложной целью для большинства противолодочных средств. Атомные подводные лодки имеют относительно небольшую батарею и дизель-генераторную силовую установку для аварийного использования в случае необходимости остановки реакторов.
Ядерная энергия сейчас используется на всех крупных подводных лодках, но из-за высокой стоимости и больших размеров ядерных реакторов на меньших подводных лодках по-прежнему используются дизель-электрические силовые установки. Соотношение более крупных и меньших подводных лодок зависит от стратегических потребностей. ВМС США, ВМС Франции и Королевский флот Великобритании имеют только атомные подводные лодки . [90] [91] что объясняется необходимостью проведения дистанционных операций. Другие крупные операторы полагаются на сочетание атомных подводных лодок для стратегических целей и дизель-электрических подводных лодок для обороны. Большинство флотов не имеют атомных подводных лодок из-за ограниченной доступности атомной энергетики и подводных технологий.
Дизель-электрические подводные лодки имеют преимущество в малозаметности перед своими атомными аналогами. Атомные подводные лодки генерируют шум от насосов охлаждающей жидкости и турбомашин, необходимых для работы реактора, даже на низких уровнях мощности. [92] [93] Некоторые атомные подводные лодки, такие как американский «Огайо», класс могут работать с закрепленными насосами охлаждающей жидкости реактора, что делает их тише, чем электрические подводные лодки. [ нужна ссылка ] Обычная подводная лодка, работающая от аккумуляторов, почти полностью бесшумна, единственный шум исходит от подшипников вала, гребного винта и шума потока вокруг корпуса, и все это прекращается, когда субмарина зависает в воде, чтобы прислушаться, остается только шум экипажа. активность. Коммерческие подводные лодки обычно полагаются только на батареи, поскольку они работают совместно с базовым кораблем.
Несколько серьезных ядерных и радиационных аварий были связаны с авариями на атомных подводных лодках. [94] [95] Авария реактора советской подводной лодки К-19 в 1961 году привела к гибели 8 человек и еще более 30 человек подверглись чрезмерному воздействию радиации. [96] В результате аварии на реакторе советской подводной лодки К-27 в 1968 году 9 человек погибли и 83 получили ранения. [94] Авария советской подводной лодки К-431 в 1985 году привела к гибели 10 человек и другим радиационным ранениям 49 человек. [95]
Альтернатива
Паровые турбины, работающие на нефтяном топливе, приводили в движение британские подводные лодки класса «К» , построенные во время Первой мировой войны и позже, чтобы придать им надводную скорость, позволяющую не отставать от боевого флота. Однако подводные лодки класса «К» не имели большого успеха.
К концу 20-го века некоторые подводные лодки, такие как британский класс «Авангард» , начали оснащаться водометными движителями вместо гребных винтов. Хотя они тяжелее, дороже и менее эффективны, чем пропеллеры, они значительно тише, что дает важное тактическое преимущество.
Вооружение


Успех подводной лодки неразрывно связан с разработкой торпеды , изобретенной Робертом Уайтхедом в 1866 году. Его изобретение (по сути такое же, как и сейчас 140 лет назад) позволило подводной лодке совершить скачок от новинки к оружию войны. . До разработки и миниатюризации гидролокатора, достаточно чувствительного для отслеживания подводной лодки, атаки ограничивались исключительно кораблями и подводными лодками, действующими вблизи или на поверхности. Первоначально наведение неуправляемых торпед осуществлялось на глаз, но во время Второй мировой войны начали распространяться аналоговые компьютеры наведения , способные рассчитывать основные решения для стрельбы. Тем не менее, для поражения цели могло потребоваться несколько «прямолинейных» торпед. Поскольку на борту хранилось не более 20–25 торпед, количество атак, которые подводная лодка могла совершить, было ограничено. Для повышения боевой выносливости, начиная с Первой мировой войны, подводные лодки также выполняли функции подводных канонерских лодок, используя свои палубные орудия против невооруженных целей и ныряя, чтобы уйти и поразить военные корабли противника. Первоначальная важность этих палубных орудий способствовала развитию неудачного варианта. Подводный крейсер, такой как французский Surcouf и Королевского флота подводные лодки X1 и M-класса . С появлением противолодочной авиации (ПЛО) орудия стали больше использоваться для защиты, чем для нападения. Более практичным способом повышения боевой выносливости был внешний торпедный аппарат, заряжавшийся только в левом порту.
Способность подводных лодок скрытно приближаться к гаваням противника привела к их использованию в качестве минных заградителей . Специально для этой цели строились подводные лодки-минеры времен Первой и Второй мировых войн. , устанавливаемые подводными лодками Современные мины , такие как британские Mark 5 Stonefish и Mark 6 Sea Urchin, могут быть развернуты из торпедных аппаратов подводной лодки.
После Второй мировой войны и США, и СССР экспериментировали с крылатыми ракетами подводных лодок , такими как ССМ-Н-8 «Регул» и П-5 «Пятёрка» . Такие ракеты требовали, чтобы подводная лодка всплыла на поверхность для запуска ракет. Они были предшественниками современных крылатых ракет подводных лодок, которые могут запускаться из торпедных аппаратов подводных лодок, например, американских BGM-109 «Томагавк» и российских РПК-2 «Вьюга» , а также вариантов противокорабельных ракет класса «земля-земля». ракеты, такие как Exocet и Harpoon , капсулированные для запуска с подводной лодки. Из торпедных аппаратов подводной лодки также могут быть запущены баллистические ракеты, например, такие ракеты, как противолодочная SUBROC . Поскольку внутренний объем как всегда ограничен, а также желание нести более тяжелые боевые нагрузки, идея внешней пусковой трубы была возрождена, обычно для герметизированных ракет, при этом такие трубы размещались между внутренним давлением и внешним обтекаемым корпусом. Управляемые торпеды также получили широкое распространение во время и после Второй мировой войны, еще больше повысив боевую выносливость и смертоносность подводных лодок и позволив им поражать другие подводные лодки на глубине (последнее теперь является одной из основных задач современных подводных лодок). ударная подводная лодка ).
Стратегическую задачу SSM-N-8 и P-5 взяли на себя баллистические ракеты подводных лодок, начиная с ракеты ВМС США «Поларис» , а затем ракет «Посейдон» и «Трайдент» .
Германия работает над ракетой IDAS малой дальности с торпедным пуском , которая может быть использована против вертолетов противолодочной обороны, а также надводных кораблей и береговых целей.
Датчики
Подводная лодка может иметь различные датчики в зависимости от своих задач. Современные военные подводные лодки почти полностью полагаются на набор пассивных и активных гидролокаторов для обнаружения целей. Активный гидролокатор использует звуковой сигнал, генерирующий эхо и обнаруживающий объекты вокруг подводной лодки. Активные системы используются редко, так как это выявляет присутствие субмарины. Пассивный гидролокатор представляет собой набор чувствительных гидрофонов, установленных в корпусе или буксируемой группы, обычно тянущейся за субмариной на несколько сотен футов. Буксируемая группа является основой систем обнаружения подводных лодок НАТО, поскольку она снижает шум потока, слышимый операторами. В дополнение к буксируемой установке применяется гидролокатор, установленный на корпусе, так как буксируемая установка не может работать на небольшой глубине и при маневрировании. Кроме того, гидролокатор имеет слепую зону «сквозь» подводную лодку, поэтому система, расположенная как спереди, так и сзади, устраняет эту проблему. Поскольку буксируемая группа проходит позади и под подводной лодкой, это также позволяет подводной лодке иметь систему как над, так и под подводной лодкой. термоклин на нужной глубине; звук, проходящий через термоклин, искажается, что приводит к снижению дальности обнаружения.
Подводные лодки также оснащены радиолокационным оборудованием для обнаружения надводных кораблей и самолетов. Капитаны подводных лодок с большей вероятностью будут использовать радиолокационные средства обнаружения, чем активный радар для обнаружения целей, поскольку радар может быть обнаружен далеко за пределами его собственной дальности возврата, обнаруживая подводную лодку. Перископы используются редко, за исключением определения местоположения и проверки личности контакта.
Гражданские подводные лодки, такие как DSV Alvin или российские «Мир» подводные лодки , для навигации полагаются на небольшие активные гидролокаторы и смотровые иллюминаторы. Человеческий глаз не может обнаружить солнечный свет на глубине ниже 300 футов (91 м) под водой, поэтому для освещения области просмотра используются источники света высокой интенсивности.

На ранних подводных лодках было мало навигационных средств, но современные подводные лодки имеют множество навигационных систем. Современные военные подводные лодки используют инерциальную систему наведения для навигации в подводном положении, но со временем неизбежно накапливается ошибка дрейфа. Чтобы противостоять этому, экипаж иногда использует глобальную систему позиционирования для определения точного местоположения. Перископ — выдвижная труба с системой призм , обеспечивающая обзор надводной поверхности — на современных подводных лодках используется лишь изредка, поскольку дальность видимости невелика. На подводных лодках класса «Вирджиния» и « Астют» используются фотонные мачты, а не оптические перископы, проникающие в корпус. Эти мачты по-прежнему должны быть развернуты над поверхностью и использовать электронные датчики видимого света, инфракрасного излучения, лазерного дальномера и электромагнитного наблюдения. Одним из преимуществ подъема мачты над поверхностью является то, что, хотя мачта находится над водой, вся подводная лодка все еще находится под водой, и ее гораздо труднее обнаружить визуально или с помощью радара.
Коммуникация
Военные подводные лодки используют несколько систем для связи с удаленными командными центрами или другими кораблями. Одним из них является радио VLF (очень низкая частота), которое может достигать подводной лодки как на поверхности, так и на довольно небольшой глубине, обычно менее 250 футов (76 м). ELF (чрезвычайно низкая частота) может достигать подводной лодки на больших глубинах, но имеет очень низкую полосу пропускания и обычно используется для вызова подводной лодки на меньшую глубину, до которой могут достигать сигналы VLF. Подводная лодка также имеет возможность спустить длинную плавучую проволочную антенну на меньшую глубину, что позволит осуществлять ОНЧ-передачу с глубоко погруженной лодки.
Выдвинув радиомачту, подводная лодка также может использовать метод « пакетной передачи ». Пакетная передача занимает всего долю секунды, что сводит к минимуму риск обнаружения подводной лодки.
Для связи с другими подводными лодками используется система, известная как «Гертруда». Гертруда – это, по сути, гидроакустический телефон . Голосовое сообщение с одной подводной лодки передается через громкоговорители малой мощности в воду, где оно обнаруживается пассивными гидролокаторами принимающей подводной лодки. Дальность действия этой системы, вероятно, очень мала, и при ее использовании в воду излучается звук, который может быть услышан противником.
Гражданские подводные лодки могут использовать аналогичные, хотя и менее мощные системы для связи с кораблями поддержки или другими подводными аппаратами в этом районе.
Системы жизнеобеспечения
Благодаря ядерной энергетике или воздухонезависимой силовой установке подводные лодки могут оставаться под водой месяцами. Обычные дизельные подводные лодки должны периодически всплывать на поверхность или работать на трубке для подзарядки батарей. Большинство современных военных подводных лодок генерируют кислород для дыхания путем электролиза пресной воды (с помощью устройства, называемого « электролитическим генератором кислорода »). Аварийный кислород можно получить путем сжигания свечей из хлората натрия . [97] Оборудование для контроля атмосферы включает в себя скруббер углекислого газа , который использует распыление абсорбента моноэтаноламина (МЭА) для удаления газа из воздуха, после чего МЭА нагревается в котле для выделения CO 2 , который затем перекачивается за борт. Аварийную очистку также можно выполнить с помощью гидроксида лития, который является расходным материалом. [97] Также используется машина, которая использует катализатор для преобразования монооксида углерода в диоксид углерода (удаляется скруббером CO 2 ) и связывает водород, полученный из корабельной аккумуляторной батареи, с кислородом в атмосфере для производства воды. [ нужна ссылка ] Система мониторинга атмосферы отбирает пробы воздуха из разных помещений корабля на наличие азота , кислорода, водорода, хладагентов R-12 и R-114 , углекислого газа, угарного газа и других газов. [97] Ядовитые газы удаляются, а кислород пополняется с помощью кислородного банка, расположенного в главном балластном танке. [ нужна ссылка ] [ нужны разъяснения ] Некоторые более тяжелые подводные лодки имеют две станции отбора кислорода (носовую и кормовую). Концентрация кислорода в воздухе иногда поддерживается на несколько процентов ниже атмосферной, чтобы снизить риск пожара.
Пресная вода производится либо испарителем, либо установкой обратного осмоса . Пресная вода в основном используется для обеспечения питательной водой реакторов и паровых энергетических установок. Он также доступен для принятия душа, умывания, приготовления пищи и уборки после удовлетворения потребностей силовой установки. Морская вода используется для смыва туалетов, а полученная «черная вода» хранится в санитарном резервуаре до тех пор, пока ее не выдуют за борт с помощью сжатого воздуха или не выкачают за борт с помощью специального санитарного насоса. Система сброса сточных вод требует навыков для работы, и перед сбросом запорные клапаны должны быть закрыты. [98] Немецкий типа VIIC катер U-1206 погиб с человеческими жертвами из-за человеческой ошибки при использовании этой системы. [99] Вода из душевых и раковин хранится отдельно в цистернах « серой воды » и сбрасывается за борт с помощью дренажных насосов.
Мусор на современных больших подводных лодках обычно утилизируется с помощью трубы, называемой устройством для удаления мусора (TDU), где он уплотняется в контейнер из оцинкованной стали. В нижней части TDU находится большой шаровой кран. Для защиты шарового крана сверху устанавливается ледяная пробка, а банки - поверх ледяной пробки. Верхняя затворная дверь закрывается, TDU заполняется водой и выравнивается с давлением моря, шаровой клапан открывается, и банки выпадают, чему способствуют грузы железного лома, находящиеся в банках. TDU также промывается морской водой, чтобы убедиться, что он полностью опорожнен, а шаровой клапан чист перед его закрытием. [ нужна ссылка ]
Экипаж

Типичная атомная подводная лодка имеет экипаж более 80 человек; на обычных лодках их обычно меньше 40. Условия на подводной лодке могут быть трудными, поскольку членам экипажа приходится работать изолированно в течение длительного периода времени, без контактов с семьей и в стесненных условиях. [100] Подводные лодки обычно сохраняют радиомолчание, чтобы избежать обнаружения. Эксплуатация подводной лодки опасна даже в мирное время, и многие подводные лодки погибли в результате аварий. [101]
Женщины

Большинство военно-морских сил запретили женщинам служить на подводных лодках даже после того, как им разрешили служить на надводных военных кораблях. Королевский флот Норвегии стал первым военно-морским флотом, допустившим женщин в состав экипажей подводных лодок в 1985 году. Королевский флот Дании разрешил женщинам-подводникам в 1988 году. [102] Его примеру последовали и другие, в том числе ВМС Швеции (1989 г.), [103] Королевский флот Австралии (1998 г.), ВМС Испании (1999 г.), [104] [105] ВМС Германии (2001 г.) и ВМС Канады (2002 г.). В 1995 году Сольвейг Крей из Королевского военно-морского флота Норвегии стала первой женщиной-офицером, принявшей на себя командование военной подводной лодкой HNoMS Kobben . [106]
8 декабря 2011 года министр обороны Великобритании Филип Хаммонд объявил, что запрет на пребывание женщин на подводных лодках в Великобритании будет снят с 2013 года. [107] Ранее существовали опасения, что женщины подвергаются большему риску из-за накопления углекислого газа на подводной лодке. Но исследование не выявило никаких медицинских причин для исключения женщин, хотя беременные женщины все равно будут исключены. [107] Подобные опасности для беременной женщины и ее плода не позволяли женщинам служить на подводных лодках в Швеции в 1983 году, когда им были предоставлены все остальные должности в ВМС Швеции. Сегодня беременным женщинам по-прежнему не разрешают служить на подводных лодках в Швеции. Однако политики посчитали общий запрет дискриминационным и потребовали, чтобы женщин судили по их индивидуальным достоинствам, оценивали их пригодность и сравнивали с другими кандидатами. Далее они отметили, что женщина, соответствующая столь высоким требованиям, вряд ли забеременеет. [103] В мае 2014 года три женщины стали первыми женщинами-подводниками РН. [108]
Женщины служили на надводных кораблях ВМС США с 1993 года, а по состоянию на 2011–2012 годы. [update], впервые начал службу на подводных лодках. До настоящего времени ВМФ допускал только три исключения для женщин, находящихся на борту военных подводных лодок: женщины-гражданские техники максимум на несколько дней, женщины- гардемарины на ночлег во время летней подготовки для ВМФ ROTC и Военно-морской академии , а также члены семьи для однодневных иждивенцев. круизы. [109] В 2009 году высокопоставленные чиновники, в том числе тогдашний министр военно-морского флота Рэй Мабус , начальник Объединенного штаба адмирал Майкл Маллен и начальник управления военно-морских операций адмирал Гэри Рагхед , начали процесс поиска способа внедрения женщин на подводные лодки. [110] В 2010 году ВМС США отменили свою политику «никаких женщин на подводных лодках». [111]
И ВМС США, и Великобритания имеют атомные подводные лодки, которые находятся в боевой готовности в течение шести месяцев или дольше. Другие военно-морские силы, которые разрешают женщинам служить на подводных лодках, имеют подводные лодки с традиционными двигателями, которые развертываются на гораздо более короткие периоды времени — обычно всего на несколько месяцев. [112] До изменений, внесенных США, ни одна страна, использующая атомные подводные лодки, не разрешала женщинам служить на борту. [113]
В 2011 году первый класс женщин-офицеров-подводников окончил Базовый курс офицеров-подводников (SOBC) Военно-морской школы подводных лодок на базе военно-морских подводных лодок Нью-Лондон . [114] Кроме того, более старшие и опытные женщины-офицеры снабжения по специальности надводной войны также посещали SOBC, перейдя к подводным лодкам с баллистическими ракетами (ПЛАРБ) и управляемыми ракетами (ПЛАРК), а также к новым линейным офицерам подводных лодок, начиная с конца 2011 года. [115] К концу 2011 года несколько женщин были назначены на «Огайо» подводную лодку с баллистическими ракетами класса USS Wyoming . [116] 15 октября 2013 года ВМС США объявили, что к январю 2015 года на двух меньших ударных подводных лодках класса «Вирджиния» , USS Virginia и USS Minnesota , в экипажах будут женщины. [111]
В 2020 году Национальная военно-морская академия подводных лодок Японии приняла первого кандидата-женщину. [117]
Покидание судна


В чрезвычайной ситуации подводные лодки могут связаться с другими кораблями, чтобы помочь в спасении, и забрать команду, когда они покидают корабль. Экипаж может использовать спасательные комплекты, такие как оборудование для аварийного спуска подводной лодки , чтобы покинуть подводную лодку через аварийный ствол , который представляет собой небольшой шлюзовой отсек, который обеспечивает экипажу путь для эвакуации из сбитой подводной лодки при атмосферном давлении небольшими группами, сводя при этом к минимуму количество воды, поступившей в подводную лодку. [118] Экипаж может избежать повреждения легких из-за чрезмерного расширения воздуха в легких из-за изменения давления, известного как легочная баротравма , поддерживая открытые дыхательные пути и выдыхая во время всплытия. [119] После побега из герметичной подводной лодки, давление воздуха в которой из-за попадания воды или других причин превышает атмосферное, экипаж подвергается риску развития декомпрессионной болезни при возвращении к надводному давлению. [120]
Альтернативным средством эвакуации является глубоководный спасательный аппарат , который может пристыковаться к вышедшей из строя подводной лодке, установить уплотнение вокруг аварийного люка и перевезти персонал при том же давлении, что и внутри подводной лодки. Если подводная лодка находится под давлением, выжившие могут запереться в декомпрессионной камере на спасательном корабле подводной лодки и перейти под давлением для безопасной декомпрессии поверхности . [121]
См. также
- Автономный подводный аппарат
- Береговая подводная лодка
- Подводная лодка класса Колумбия
- Глубинная бомба
- Вымышленные подводные лодки
- Летающая подводная лодка
- Список кораблей, потопленных подводными лодками, по числу погибших
- Список действий подводной лодки
- Список классов подводных лодок
- Список происшествий с подводными лодками с 2000 года
- Список музеев подводных лодок
- Список подводных лодок Второй мировой войны
- Список характеристик подводных лодок Второй мировой войны.
- Список затонувших атомных подводных лодок
- Торговая подводная лодка
- Ядерный флот
- Полупогружаемый военный корабль
- Фильмы о подводных лодках
- Подводный силовой кабель
- Симулятор подводной лодки — жанр компьютерной игры.
- Суперкавитация
- Беспилотный подводный аппарат
По стране
- Список операторов подводных лодок
- Австралия - подводная лодка класса Коллинз
- Бангладеш - Подводные лодки ВМС Бангладеш.
- Великобритания – Список подводных лодок Королевского флота , Список классов подводных лодок Королевского флота.
- Китай – подводные лодки ВМС Народно-освободительной армии.
- Франция – Подводные лодки ВМС Франции , Список подводных лодок ВМС Франции , Список классов и типов французских подводных лодок
- Германия - Список подводных лодок Германии
- Индия – Подводные лодки ВМС Индии
- Израиль – подводная лодка класса «Дельфин».
- Япония - Подводные лодки Императорского флота Японии , Список классов боевых кораблей Морских сил самообороны Японии § SS: Подводная лодка
- Нидерланды - Список подводных лодок Нидерландов
- Пакистан - Список действующих кораблей ВМС Пакистана § Подводные лодки
- Румыния - румынские подводные лодки времен Второй мировой войны.
- Россия – Список советских и российских классов подводных лодок , Будущие российские подводные лодки
- Советский Союз - Список кораблей ВМФ СССР § Подводные лодки
- Испания - Список подводных лодок ВМС Испании
- Сингапур - ВМС Республики Сингапур § Подводные лодки
- Турция - Список подводных лодок ВМС Турции
- США - Подводные лодки ВМС США , Список подводных лодок ВМС США , Список классов подводных лодок США , Лаборатория медицинских исследований подводных лодок ВМС
Примечания
- ^ Например, см. HMS/m Tireless в IWM , HMS/m A.1 в Historic England.
- ^ На странице службы подводных лодок на официальном сайте Королевского флота упоминаются «Эти мощные лодки» [1] , а в своей речи в Вашингтоне адмирал сэр Филип Джонс объявил, что «название «Дредноут» вернется в качестве ведущей лодки и класса». имя» для новейших британских подводных лодок с баллистическими ракетами . [2]
Ссылки
- ^ «Морской биолог и специалист по биолюминесценции Эдит А. Виддер: Расшифровка видео: Карьера в области исследования океана: Управление исследования и исследования океана NOAA» .
- ↑ Перейти обратно: Перейти обратно: а б Катлер, Томас Дж. (1 октября 2017 г.). «О кораблях, лодках и…» Руководство Bluejacket. Военно-морская история . Том. 31, нет. 5. Военно-морской институт США . Проверено 9 ноября 2022 г.
- ^ Шерман, Крис (14 апреля 2009 г.). «Самая большая подводная лодка в мире» . Английская Россия . Проверено 21 мая 2013 г.
- ^ Подводная лодка в OED ; получено 4 сентября 2021 г.
- ^ Подводная лодка в OED ; получено 4 сентября 2021 г.
- ^ Новый краткий Оксфордский словарь английского языка , Clarendon Press, Oxford, 1993, Vol. 2 Н – Я
- ^ Зонтаг, Шерри; Дрю, Кристофер; Дрю, Аннет Лоуренс (19 октября 1998 г.). Блеф вслепую: нерассказанная история американского подводного шпионажа . Общественные дела. ISBN 9781891620089 .
- ^ Макхейл, Гэннон (15 сентября 2013 г.). Лодка-невидимка: ведем холодную войну на быстроходной ударной подводной лодке . Издательство Военно-морского института. ISBN 9781612513461 .
- ^ HMS/m на сайте abronyms.thefreedictionary; получено 4 сентября 2021 г.
- ^ Джоан Тенье Ханнон ( Жан Тайсниер (1508–1562)), Opusculum perpetual memoria dignissimum, de natura Magneticis et eius effectibus [Наиболее подходящая работа в вечной памяти о природе магнита и его эффектах ] (Кёльн (Кёльн, «Кёльн» "), (Германия): Иоганн Биркман, 1562), стр. 43–45. Доступно: Баварская государственная библиотека . 43: «Но чтобы читателю не показалось, что он опровергает наши утверждения, полагая, что те, которые он считает чудесами, выходят за пределы природы, я поясню с помощью одной демонстрации, а именно, как человек может войти на дно любой воды или реки. , с сухим телом, потому что он видел меня в знаменитом городе и королевстве Толлети, которое я подтвердил, в присутствии благочестивой памяти Карла Пятого императора и бесчисленного множества других зрителей». (Тем не менее, читатель, наше заявление рассматривается как опровержение чего-то засвидетельствованного, что считают чудом, выходящим за пределы природы; я поясню уникальное доказательство, а именно, как можно проникнуть на дно любой воды или реки, оставаясь сухим , который, утверждаю, я видел в знаменитом городе и королевстве Толедо в присутствии блаженной памяти императора Карла V и множества других зрителей.) Со с. 44: «Nunc venio ad experientiam praedictam, Tolleti demostratam a duobus Graecis, qui Cacabo magnae amplitudinis Accepto, orificio inverso, funibus in aere pendente, tabem & asseres in medio concavi Cacabi affigunt,...» (Теперь я подхожу к эксперименту, упомянутому выше: в Толедо его показали два грека, которые, как я понимаю, были прикреплены к котлу ( cacabus ) огромных размеров — [у которого] было перевернутое отверстие [и который удерживался] в воздухе верёвками — балка и шесты внутри полого котла ... [Брус и шесты образовывали сиденья для ныряльщиков.]) Немецкий ученый-иезуит Гаспар Шотт (1608–1666) процитировал отчет Тенье и упомянул, что Тенье был свидетелем демонстрации в 1538 году. Гаспар Шотт, Technica Curiosa , сиве Mirabilia Artis, Libris XII. ... [Любопытные произведения искусства или чудесные произведения мастерства, в 12 книгах ...] (Нюрнберг (Норимберга), (Германия): Йоханнес Андреас Эндтер и Вольфганг Эндтер, 1664), Liber VI: Mirabilium Mechanicorum (Книга 6) :Чудеса механики), п. 393. Со с. 393: «... quod nihilominus Anno 1538 in Hispaniae oppido Toleto &c. coram piae memoriae Carolo V. Imperatore, cum decem propemodum millibus hominum experientia vidi». (...что все-таки я видел опыт в 1538 году в Испании, в городе Толедо и т. д., в присутствии блаженной памяти императора Карла V, при почти десяти тысячах человек.)
- ^ «Испания – пионер подводного плавания » АВС 7 марта 1980 г. Архивировано из оригинала 21 июля.
- ^ Дельгадо (2011), с. 13.
- ↑ Перейти обратно: Перейти обратно: а б Тьери, Геррит (10 июня 1932 г.), Корнелис Дреббель (1572–1633) (PDF) (Диссертация), Амстердам: Лейденский университет, стр. 92
- ^ «Херонимо де Аянц, забытый да Винчи, спроектировавший подводную лодку и системы кондиционирования воздуха в австрийской Испании» (на испанском языке). Хатака. 26 сентября 2021 г. . Проверено 17 октября 2022 г.
- ^ Мэри Беллис. «Изобретение подводной лодки» . Архивировано из оригинала 9 июля 2012 года . Проверено 16 апреля 2014 г.
- ^ «Подводная черепаха: военно-морские документы войны за независимость» . Библиотека военно-морского ведомства. Архивировано из оригинала 17 сентября 2008 года . Проверено 21 мая 2013 г.
- ^ Изобретатель недели: Архив . mit.edu
- ^ Дельгадо, Джеймс П. (2011). Бесшумные убийцы: подводные лодки и подводная война . Издательство Блумсбери. п. 224. ИСБН 9781849088602 .
- ^ Лэнс, Рэйчел . «Новая взрывная теория о том, что обрекло экипаж «Ханли» » . Смитсоновский журнал . Проверено 24 ноября 2020 г.
- ^ Джеймс П. Дельгадо (2006). «Археологическая разведка подводной лодки 1865 года постройки, построенной в Америке, на острове Сан-Тельмо, архипелаг де лас Перлас, Панама». Международный журнал морской археологии . 35 (2): 230–252. Бибкод : 2006IJNAr..35..230D . дои : 10.1111/j.1095-9270.2006.00100.x . S2CID 162403756 .
- ^ «Восстановление затонувших кораблей Чили XIX века в порту Вальпараисо» . Сантьяго Таймс . 25 ноября 2006 г. Архивировано из оригинала 24 января 2008 г. Проверено 17 апреля 2007 г.
- ^ «История торпеды: Торпеда Уайтхеда Mk1» . Командование военно-морской истории и наследия. Архивировано из оригинала 15 сентября 2014 года . Проверено 28 мая 2013 г.
- ^ «Джон Филип Холланд» . Британская энциклопедия . Проверено 1 апреля 2015 г.
- ^ Бауэрс, Пол (1999). Загадка Гаррета и первые пионеры подводных лодок . Эйрлайф. п. 167. ИСБН 978-1-84037-066-9 .
- ^ Санматео, Хавьер (5 сентября 2013 г.). «Исаак Пераль, разочарованный гений» . Мир (на испанском языке) . Проверено 12 декабря 2017 г.
- ^ Дельгадо, Джеймс П.; Касслер, Клайв (2011). Бесшумные убийцы: подводные лодки и подводная война . Издательство Блумсбери. п. 89. ИСБН 978-1849088602 .
- ^ Галантин, Игнатий Дж., Адмирал ВМС США (в отставке). Предисловие к «Подводнику» Джонни Кута, стр. 1
- ^ Олендер с. 175
- ^ Томас Адам. Германия и Америка . п. 1155.
- ^ Дуглас Боттинг, стр. 18–19 «Подводные лодки», ISBN 978-0-7054-0630-7
- ^ Гибсон и Прендергаст, с. 2
- ^ Роджер Чикеринг, Стиг Фёрстер, Бернд Грайнер, Немецкий исторический институт (Вашингтон, округ Колумбия) (2005). « Мир в тотальной войне: глобальный конфликт и политика разрушения, 1937–1945 ». Издательство Кембриджского университета. ISBN 978-0-521-83432-2 , с. 73
- ^ «1915-1926: Класс К» . РН Сабвуферы . Ассоциация подводников Барроу . Проверено 24 февраля 2019 г.
- ^ Ян Джек (4 ноября 2017 г.). «От К-класса до лодки для вечеринок, подводные лодки имеют историю катастроф» . Хранитель . Проверено 13 января 2022 г.
- ^ Крокер III, HW (2006). Не наступай на меня . Нью-Йорк: Коронный форум. п. 310 . ISBN 978-1-4000-5363-6 .
- ^ «Битва за Атлантику: опасность подводных лодок» . Би-би-си . 30 марта 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б О'Кейн, с. 333
- ^ Блэр, Клей-младший. Тихая победа , стр. 991–92. Остальные погибли в результате несчастных случаев или, как в случае с «Сивулфом» , дружественного огня .
- ^ Блэр, с. 878
- ^ «История подводной лодки» . Королевский флот. Архивировано из оригинала 20 февраля 2007 года . Проверено 18 апреля 2007 г.
- ^ «История военного корабля США Наутилус (SSN 571)» . Музей подводных сил . 2006 год . Проверено 16 января 2012 г.
- ^ Тони Лонг (10 мая 2007 г.). «10 мая 1960 года: военный корабль США «Тритон» совершил первое подводное кругосветное плавание» . Проводной . Проверено 18 апреля 2010 г.
- ^ «Затопление Гази» . Бхарат Ракшак Монитор, 4(2) . Архивировано из оригинала 28 ноября 2011 года . Проверено 20 октября 2009 г.
- ^ Росситер, Майк (2009). Потопить Бельграно . Лондон: Рэндом Хаус. стр. 305–18, 367–77. ISBN 978-1-4070-3411-9 . OCLC 1004977305 .
- ↑ Перейти обратно: Перейти обратно: а б «Фонд морских исторических данных – Корабль» . www.marhisdata.nl (на голландском языке) . Проверено 11 февраля 2021 г.
- ^ «Израиль признает, что потопил судно с ливанскими беженцами в результате военной ошибки 1982 года, в результате чего погибло 25 человек — ТВ» . www.timesofisrael.com . 22 ноября 2018 года . Проверено 11 февраля 2021 г.
- ^ Маттиас, Л. (30 мая 2011 г.). «Самая старая в мире затопленная подводная лодка достигла земли» . CNN . Архивировано из оригинала 4 марта 2016 года . Проверено 29 января 2013 г.
- ^ Финлан, Аластер (2004). Королевский флот в Фолклендском конфликте и войне в Персидском заливе: культура и стратегия . Британская политика и общество. Том. 15. Лондон: Psychology Press. п. 214. ИСБН 978-0-7146-5479-9 .
- ^ «Отплытие — Последние путешествия подводных лодок Диснейленда» . Проверено 24 апреля 2010 г.
- ^ «Мезоскаф «Август Пиккар» » . Швейцарский музей транспорта . Архивировано из оригинала 7 марта 2016 года.
- ^ Дэвид Брюс Уивер (2001). Энциклопедия экотуризма . КАБИ. п. 276 . ISBN 978-0-85199-368-3 .
- ^ Бут, Уильям; Фореро, Хуан (6 июня 2009 г.). «Путешествие по Тихому океану: подводные лодки на поверхности как ключевой инструмент наркокартелей» . Вашингтон Пост .
- ^ «В Колумбии захвачена наркоподводная лодка ФАРК» . Новости Би-би-си . 5 сентября 2011 г.
- ↑ Перейти обратно: Перейти обратно: а б с д и ж г час я дж к л м н тот п Макларен, Альфред С., капитан USN «Под льдом на подводных лодках», Труды Военно-морского института США , июль 1981 г., стр. 105–9.
- ^ Уильям Дж. Броуд (18 марта 2008 г.). «Куинфиш: История холодной войны» . Нью-Йорк Таймс . Проверено 17 февраля 2010 г.
- ^ «История военного корабля США Гурнард и полярных операций» .
- ^ «NavSource Online: Архив фотографий подводных лодок» . navsource.org. 14 ноября 2016 года . Проверено 3 марта 2017 г.
- ^ «HMS Superb (1976) (9-е место)» . britainsnavy.co.uk. 12 января 2013 года . Проверено 4 марта 2017 г.
- ^ «Подводные силы участвуют в ледовых учениях-2007» . Правительственные пресс-релизы (США). 20 марта 2007 года . Проверено 1 февраля 2017 г.
- ^ «CNO посещает ICEX 2009» . военно-морской флот.мил. 24 марта 2009 г. Архивировано из оригинала 3 марта 2017 г. . Проверено 3 марта 2017 г.
- ^ «Физика жидкостей и газов» . Элементарная классическая физика . Проверено 7 октября 2006 г.
- ^ Ричард О'Кейн (1987). Ваху . Президио Пресс. п. 12 . ISBN 9780891413011 .
- ^ Рой Берчер; Луи Райдилл (1995). Концепции проектирования подводных лодок . Издательство Кембриджского университета. п. 170.
- ^ Ван, Вэньцзинь; и др. (2020). «Отказоустойчивый прототип рулевого управления для подводных аппаратов с X-рулем направления» . Датчики . 20 (7): 1816. Бибкод : 2020Senso..20.1816W . дои : 10.3390/s20071816 . ПМК 7180876 . ПМИД 32218145 .
- ^ «Детали замены класса Огайо» . Военно-морской институт США . 1 ноября 2012 года . Проверено 26 мая 2020 г.
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 56. ISBN 9185944-40-8 .
- ^ [3] . Журнал национальной обороны. Архивировано 5 апреля 2008 г. в Wayback Machine.
- ^ «Федерация американских ученых» . Фас.орг . Проверено 18 апреля 2010 г.
- ^ «Триест» . History.navy.mil. Архивировано из оригинала 17 марта 2010 года . Проверено 18 апреля 2010 г.
- ^ «Военно-морская академия США» (PDF) .
- ^ «Подробная информация о типах немецких подводных лодок» . Шархантерс Интернэшнл . Архивировано из оригинала 24 февраля 2010 года . Проверено 21 сентября 2008 г.
- ^ Миллер, Дэвид; Джордан, Джон (1987). Современная подводная война . Лондон: Книги Саламандры. п. 63. ИСБН 0-86101-317-4 .
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 12–13. ISBN 9185944-40-8 .
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 12–15. ISBN 9185944-40-8 .
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 18–19, 24–25. ISBN 9185944-40-8 .
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 16–17, 20–21, 26–29, 34–35, 82. ISBN. 9185944-40-8 .
- ^ Гранхольм, Фредрик (2003). От Хайена до Сёдерманланда: шведские подводные лодки за 100 лет . Ассоциация морской литературы. стр. 40–43, 48–49, 52–61, 64–67, 70–71. ISBN 9185944-40-8 .
- ↑ Перейти обратно: Перейти обратно: а б Фридман, Норман (1995). Подводные лодки США до 1945 года: иллюстрированная история конструкции . Издательство Военно-морского института. стр. 259–260. ISBN 978-1-55750-263-6 .
- ^ Никoлaeв, A.C. "Проект "Пaлтyc" (NATO-"Kilo")" . Энциклопедия отeчествeннoгo подводнoгo флотa . Retrieved 2 June 2020 .
- ↑ Перейти обратно: Перейти обратно: а б «Какова мотивация судового электродвижения» . Электротехнический специалист . Проверено 2 июня 2020 г. [ постоянная мертвая ссылка ]
- ↑ Перейти обратно: Перейти обратно: а б «Дизель-электрические силовые установки: краткое руководство по проектированию дизель-электрической силовой установки» (PDF) . МАН Энергетические Решения . стр. 3–4 . Проверено 2 июня 2020 г. [ постоянная мертвая ссылка ]
- ^ Ирландия, Бернард (2003). Битва за Атлантику . Барнсли, Великобритания: Книги о ручке и мече. п. 187. ИСБН 978-1-84415-001-4 .
- ^ Шулль, Джозеф (1961). Далекие корабли . Оттава: Королевский принтер, Канада. п. 259.
- ^ Лэмб, Джеймс Б. (1987). По треугольнику беги . Торонто: Тотемные книги. стр. 25, 26 . ISBN 978-0-00-217909-6 .
- ^ ВМС, США (сентябрь 2008 г.). Подводная лодка . Типография США. ISBN 978-1-935327-44-8 .
- ^ «СС Х-1» . Ассоциация исторических военно-морских кораблей. Архивировано из оригинала 18 августа 2013 года . Проверено 24 февраля 2014 г.
- ^ «S-80: подводная лодка Испании для выхода в море» . Ежедневник оборонной промышленности. 15 декабря 2008 г.
- ^ «Подводная война» . Архивировано из оригинала 8 сентября 2006 года . Проверено 7 октября 2006 г.
- ^ «Текущие возможности Франции» . Nti.org . Проверено 18 апреля 2010 г.
- ^ Томпсон, Роджер (2007). Невыученные уроки . Издательство Военно-морского института США. п. 34. ISBN 978-1-59114-865-4 .
- ^ Ли, ТВ (30 декабря 2008 г.). Военные технологии мира [2 тома] . АВС-КЛИО. п. 344. ИСБН 978-0-275-99536-2 .
- ↑ Перейти обратно: Перейти обратно: а б Джонстон, Роберт (23 сентября 2007 г.). «Самые смертоносные радиационные аварии и другие события, приводящие к радиационным жертвам» . База данных о радиологических инцидентах и связанных с ними событиях.
- ↑ Повышение безопасности источников радиации. Архивировано 26 марта 2009 г. в Wayback Machine, с. 14
- ↑ Перейти обратно: Перейти обратно: а б с Как атомные подводные лодки производят кислород? . www.youtube.com (видео). Умнее с каждым днем 251. 21 февраля 2021 г. Проверено 26 января 2022 г.
- ^ Как какать на атомной подводной лодке (256) . www.youtube.com (видео). Умнее с каждым днем. 9 мая 2021 г. Проверено 27 января 2022 г.
- ^ «У-1206» . Uboat.net . Проверено 18 апреля 2010 г.
- ^ «Тесный и тяжеловооруженный — посмотрите, какова жизнь на борту атомной подводной лодки, на этих фотографиях» . Бизнес-инсайдер .
- ^ Бейтман, Сэм. «CO07012 | Опасности глубин: опасности подводных операций в Азии» . Школа международных исследований С. Раджаратнама . Наньянский технологический университет, Сингапур . Проверено 24 апреля 2021 г.
- ^ «Обзор НАТО – Том 49 – № 2 – Лето 2001 г.: Женщины в форме» . НАТО.int. 31 августа 2001 г. Архивировано из оригинала 8 февраля 2016 г. Проверено 18 апреля 2010 г.
- ↑ Перейти обратно: Перейти обратно: а б «Историк» (на шведском языке). Архивировано из оригинала 27 сентября 2007 года.
- ^ Вирседа, Мария дель Кармен (2014). «Женщины в Вооружённых Силах» (PDF) . Профессиональные темы .
- ^ «BOE-A-1999-11194 Закон 17/1999 от 18 мая о режиме личного состава Вооруженных Сил» . стр. 18751–18797.
- ^ «Форсварснетт: Historikk» (на норвежском языке). Архивировано из оригинала 9 февраля 2006 года.
- ↑ Перейти обратно: Перейти обратно: а б Хопкинс, Ник (8 декабря 2011 г.). «Королевский флот разрешит женщинам служить на подводных лодках» . Хранитель . Лондон . Проверено 1 апреля 2012 г.
- ^ «Королевский флот получил первых женщин-подводников» . Би-би-си . 5 мая 2014 года . Проверено 5 мая 2014 г.
- ^ вопрос № 10. Архивировано 27 сентября 2006 г. в Wayback Machine.
- ^ Уильям Х. МакМайкл и Эндрю Скутро (27 сентября 2009 г.). «SecNav, CNO: Женщины должны служить на подводных лодках» . «ВМС Таймс» .
- ↑ Перейти обратно: Перейти обратно: а б «Военно-морской флот назвал первые два ударных катера с женским экипажем» . Новости USNI. 15 октября 2013 года . Проверено 9 января 2014 г.
- ^ «Командующий подводными силами Тихоокеанского флота США» . www.csp.navy.mil .
- ^ Скотт Тайсон, Энн (26 сентября 2009 г.). «Военно-морской флот стремится разрешить женщинам служить на подводных лодках» . Вашингтон Пост . Проверено 18 апреля 2010 г.
- ^ Войдите в свою компанию или офис верхнего уровня (19 июля 2011 г.). «OMA: выпускницы женской средней школы говорят, что они идеально подходят» . Ct.gov . Проверено 27 декабря 2011 г.
- ^ Командир 10-й группы подводных лодок по связям с общественностью. «Военно-морской флот приглашает женщин служить на подводных лодках» . Военно-морской флот.мил. Архивировано из оригинала 6 мая 2012 года . Проверено 27 декабря 2011 г.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ «Отчет: 12 моряков замешаны в скандале с душем на подводной лодке» . Military.com . Проверено 1 апреля 2015 г.
- ^ Персонал (22 января 2020 г.). «Первая женщина поступила в Академию подводных лодок Японии после снятия ограничений» . Джапан Таймс . Архивировано из оригинала 16 июля 2020 года . Проверено 16 июля 2020 г.
- ^ Фрэнк, С.Дж.; Керли, доктор медицины; Райдер, С.Дж. (1997). «Биомедицинский обзор системы эвакуации с подводных лодок ВМС США: 1996» . Технический отчет лаборатории медицинских исследований подводных лодок ВМФ . НСМРЛ-1205. Архивировано из оригинала 15 апреля 2013 года . Проверено 15 марта 2013 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Бентон П.Дж., Фрэнсис Т.Дж., Петибридж Р.Дж. (1999). «Спирометрические показатели и риск баротравмы легких при подготовке к побегу с подводной лодки» . Журнал подводной и гипербарической медицины . 26 (4): 213–7. ПМИД 10642066 . Архивировано из оригинала 25 мая 2013 года . Проверено 15 марта 2013 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Уэзерсби, ПК; Сурванши, СС; Паркер, ЕС; Темпл, диджей; Тонер, CB (1999). «Оценочные риски DCS при спасении подводных лодок под давлением» . Технический отчет Центра медицинских исследований ВМС США . НМРЦ 1999-04. Архивировано из оригинала 25 мая 2013 года . Проверено 15 марта 2013 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Экенхофф, Р.Г. (1984). «Спасение подводной лодки под давлением» . Технический отчет лаборатории медицинских исследований подводных лодок ВМФ . НСМРЛ-1021. Архивировано из оригинала 25 мая 2013 года . Проверено 15 марта 2013 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка )
Библиография
Общая история
- История подводных лодок: от истоков до наших дней Жан -Мари Мати и Александр Шелдон-Дюпле. (Булонь-Бийанкур: ETAI, 2002).
- ДиМеркурио, Майкл; Бенсон, Майкл (2003). Полный идиотский справочник по подводным лодкам . Альфа. ISBN 978-0-02-864471-4 . OCLC 51747264 .
- Дельгадо, Джеймс П. (2011). Бесшумные убийцы: подводные лодки и подводная война . Оксфорд: Издательство Osprey. ISBN 978-1-84908-860-2 .
Культура
- Редфорд, Дункан. Подводная лодка: история культуры от Великой войны до ядерной войны (IB Tauris, 2010) 322 страницы; сосредоточьтесь на британском военно-морском и гражданском понимании подводной войны, включая романы и фильмы.
Подводные лодки до 1914 г.
- Гардинер, Роберт (1992). Пар, сталь и снарядный огонь, Паровой военный корабль 1815–1905 гг . Аннаполис, Мэриленд: Издательство Военно-морского института. ISBN 978-1-55750-774-7 . ОСЛК 30038068 .
1900/Русско-японская война 1904–1905 гг.
- Йентшура, Хансгеорг; Дитер Юнг; Питер Микель (1977). Военные корабли Императорского флота Японии 1869–1945 гг . Аннаполис, Мэриленд: Военно-морской институт США. ISBN 978-0-87021-893-4 .
- Олендер, Петр (2010). Русско-японская морская война 1904–1905 гг. Том. 2 Цусимское сражение . Сандомир, Польша: Stratus sc ISBN 978-83-61421-02-3 .
- Шоуэлл, Джек (2006). Век подводных лодок: немецкая подводная война 1906–2006 гг . Великобритания: Издательство Chatham Publishing. ISBN 978-1-86176-241-2 .
- Симмонс, Жак (1971). Полноцветное руководство Grosset ВОЕННЫЕ КОРАБЛИ . США: ISBN Grosset & Dunlap, Inc. 978-0-448-04165-0 .
- Уоттс, Энтони Дж. (1990). Императорский Российский Флот . Лондон: Arms and Armor Press. ISBN 978-0-85368-912-6 .
Вторая мировая война
- Блэр, Клэй (1975). Тихая победа: подводная война США против Японии . Филадельфия: Липпинкотт. ISBN 978-0-397-00753-0 . OCLC 821363 .
- Локвуд, Чарльз А. (1951). Потопите их всех: подводная война в Тихом океане . Нью-Йорк: Даттон. OCLC 1371626 .
- О'Кейн, Ричард Х. (1977). Очистите мост!: Военные патрули военного корабля США «Танг» . Чикаго: Рэнд МакНелли. ISBN 978-0-528-81058-9 . OCLC 2965421 .
- О'Кейн, Ричард Х. (1987). Ваху: Патрули самой известной подводной лодки Америки времен Второй мировой войны . Новато, Калифорния: Presidio Press. ISBN 978-0-89141-301-1 . OCLC 15366413 .
- Вернер, Герберт А. (1999). Железные гробы: личный отчет о сражениях немецких подводных лодок во Второй мировой войне . Лондон: Cassell Military. ISBN 978-0-304-35330-9 . OCLC 41466905 .
- Бич, Эдвард Л. (1952). Подводная лодка! . Х. Холт. ОСЛК 396382 .
Холодная война
- Прятки: нерассказанная история времен Холодной войны морского шпионажа , Питер Хухтхаузен и Александр Шелдон-Дюпле . (Хобокен, Нью-Джерси: J. Wiley & Sons, 2008 г., ISBN 978-0-471-78530-9 )
- Макхейл, Гэннон (2008). Лодка-невидимка: сражайтесь в холодной войне на быстроходной подводной лодке . Издательство Военно-морского института. ISBN 978-1-59114-502-8 . OCLC 216938657 .
Внешние ссылки
- Патент США 708 553 – Подводная лодка.
- Подводная лодка: Часть II: Строительство (1955) доступна для бесплатного просмотра и скачивания в Интернет-архиве.
- The Fleet Type Submarine Online , 1944–1946 гг. Учебные пособия по подводным лодкам ВМС США
- Американское общество инженеров по безопасности. Журнал профессиональной безопасности. Аварии на подводных лодках: статистическая оценка за 60 лет . С. Тингл. Сентябрь 2009 г., стр. 31–39. Заказ полной статьи ; или Воспроизведение без графиков/таблиц