Сонар


Сонар ( звуковая навигация и дальность или звуковая навигация и дальность ) [ 2 ] Это метод, который использует распространение звука (обычно под водой, как в подводной навигации ) для навигации , измерения расстояний ( дальномерности ), связи или обнаружения объектов на поверхности воды или под ней, например, других судов. [ 3 ]
«Сонар» может относиться к одному из двух типов технологий: пассивный гидролокатор означает прислушивание к звуку, издаваемому судами; активный гидролокатор означает излучение звуковых импульсов и прислушивание к эху. Гидролокатор может использоваться как средство акустической локации и измерения эхо-характеристик «целей» в воде. [ 4 ] Акустическая локация в воздухе использовалась до появления радиолокации . Сонар также может использоваться для навигации роботов. [ 5 ] а содар (гидролокатор, направленный вверх) используется для исследований атмосферы. Термин «сонар» также используется для обозначения оборудования, используемого для генерации и приема звука. Акустические частоты, используемые в гидроакустических системах, варьируются от очень низких ( инфразвуковых ) до чрезвычайно высоких ( ультразвуковых ). Изучение подводного звука известно как подводная акустика или гидроакустика .
The first recorded use of the technique was in 1490 by Leonardo da Vinci, who used a tube inserted into the water to detect vessels by ear.[6] It was developed during World War I to counter the growing threat of submarine warfare, with an operational passive sonar system in use by 1918.[3] Modern active sonar systems use an acoustic transducer to generate a sound wave which is reflected from target objects.[3]
History
Although some animals (dolphins, bats, some shrews, and others) have used sound for communication and object detection for millions of years, use by humans in the water was initially recorded by Leonardo da Vinci in 1490: a tube inserted into the water was said to be used to detect vessels by placing an ear to the tube.[6]
In the late 19th century, an underwater bell was used as an ancillary to lighthouses or lightships to provide warning of hazards.[7]
The use of sound to "echo-locate" underwater in the same way as bats use sound for aerial navigation seems to have been prompted by the Titanic disaster of 1912.[8] The world's first patent for an underwater echo-ranging device was filed at the British Patent Office by English meteorologist Lewis Fry Richardson a month after the sinking of Titanic,[9] and a German physicist Alexander Behm obtained a patent for an echo sounder in 1913.[10]
The Canadian engineer Reginald Fessenden, while working for the Submarine Signal Company in Boston, Massachusetts, built an experimental system beginning in 1912, a system later tested in Boston Harbor, and finally in 1914 from the U.S. Revenue Cutter Miami on the Grand Banks off Newfoundland.[9][11] In that test, Fessenden demonstrated depth sounding, underwater communications (Morse code) and echo ranging (detecting an iceberg at a 2-mile (3.2 km) range).[12][13] The "Fessenden oscillator", operated at about 500 Hz frequency, was unable to determine the bearing of the iceberg due to the 3-metre wavelength and the small dimension of the transducer's radiating face (less than 1⁄3 wavelength in diameter). The ten Montreal-built British H-class submarines launched in 1915 were equipped with Fessenden oscillators.[14]
During World War I the need to detect submarines prompted more research into the use of sound. The British made early use of underwater listening devices called hydrophones, while the French physicist Paul Langevin, working with a Russian immigrant electrical engineer Constantin Chilowsky, worked on the development of active sound devices for detecting submarines in 1915. Although piezoelectric and magnetostrictive transducers later superseded the electrostatic transducers they used, this work influenced future designs. Lightweight sound-sensitive plastic film and fibre optics have been used for hydrophones, while Terfenol-D and lead magnesium niobate (PMN) have been developed for projectors.
ASDIC

In 1916, under the British Board of Invention and Research, Canadian physicist Robert William Boyle took on the active sound detection project with A. B. Wood, producing a prototype for testing in mid-1917. This work for the Anti-Submarine Division of the British Naval Staff was undertaken in utmost secrecy, and used quartz piezoelectric crystals to produce the world's first practical underwater active sound detection apparatus. To maintain secrecy, no mention of sound experimentation or quartz was made – the word used to describe the early work ("supersonics") was changed to "ASD"ics, and the quartz material to "ASD"ivite: "ASD" for "Anti-Submarine Division", hence the British acronym ASDIC. In 1939, in response to a question from the Oxford English Dictionary, the Admiralty made up the story that it stood for "Allied Submarine Detection Investigation Committee", and this is still widely believed,[15] though no committee bearing this name has been found in the Admiralty archives.[16]
By 1918, Britain and France had built prototype active systems. The British tested their ASDIC on HMS Antrim in 1920 and started production in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school HMS Osprey and a training flotilla of four vessels were established on Portland in 1924.
By the outbreak of World War II, the Royal Navy had five sets for different surface ship classes, and others for submarines, incorporated into a complete anti-submarine system. The effectiveness of early ASDIC was hampered by the use of the depth charge as an anti-submarine weapon. This required an attacking vessel to pass over a submerged contact before dropping charges over the stern, resulting in a loss of ASDIC contact in the moments leading up to attack. The hunter was effectively firing blind, during which time a submarine commander could take evasive action. This situation was remedied with new tactics and new weapons.
The tactical improvements developed by Frederic John Walker included the creeping attack. Two anti-submarine ships were needed for this (usually sloops or corvettes). The "directing ship" tracked the target submarine on ASDIC from a position about 1500 to 2000 yards behind the submarine. The second ship, with her ASDIC turned off and running at 5 knots, started an attack from a position between the directing ship and the target. This attack was controlled by radio telephone from the directing ship, based on their ASDIC and the range (by rangefinder) and bearing of the attacking ship. As soon as the depth charges had been released, the attacking ship left the immediate area at full speed. The directing ship then entered the target area and also released a pattern of depth charges. The low speed of the approach meant the submarine could not predict when depth charges were going to be released. Any evasive action was detected by the directing ship and steering orders to the attacking ship given accordingly. The low speed of the attack had the advantage that the German acoustic torpedo was not effective against a warship travelling so slowly. A variation of the creeping attack was the "plaster" attack, in which three attacking ships working in a close line abreast were directed over the target by the directing ship.[17]
The new weapons to deal with the ASDIC blind spot were "ahead-throwing weapons", such as Hedgehogs and later Squids, which projected warheads at a target ahead of the attacker and still in ASDIC contact. These allowed a single escort to make better aimed attacks on submarines. Developments during the war resulted in British ASDIC sets that used several different shapes of beam, continuously covering blind spots. Later, acoustic torpedoes were used.
Early in World War II (September 1940), British ASDIC technology was transferred for free to the United States. Research on ASDIC and underwater sound was expanded in the UK and in the US. Many new types of military sound detection were developed. These included sonobuoys, first developed by the British in 1944 under the codename High Tea, dipping/dunking sonar and mine-detection sonar. This work formed the basis for post-war developments related to countering the nuclear submarine.
SONAR
During the 1930s American engineers developed their own underwater sound-detection technology, and important discoveries were made, such as the existence of thermoclines and their effects on sound waves.[18] Americans began to use the term SONAR for their systems, coined by Frederick Hunt to be the equivalent of RADAR.[19]
US Navy Underwater Sound Laboratory
In 1917, the US Navy acquired J. Warren Horton's services for the first time. On leave from Bell Labs, he served the government as a technical expert, first at the experimental station at Nahant, Massachusetts, and later at US Naval Headquarters, in London, England. At Nahant he applied the newly developed vacuum tube, then associated with the formative stages of the field of applied science now known as electronics, to the detection of underwater signals. As a result, the carbon button microphone, which had been used in earlier detection equipment, was replaced by the precursor of the modern hydrophone. Also during this period, he experimented with methods for towing detection. This was due to the increased sensitivity of his device. The principles are still used in modern towed sonar systems.
To meet the defense needs of Great Britain, he was sent to England to install in the Irish Sea bottom-mounted hydrophones connected to a shore listening post by submarine cable. While this equipment was being loaded on the cable-laying vessel, World War I ended and Horton returned home.
During World War II, he continued to develop sonar systems that could detect submarines, mines, and torpedoes. He published Fundamentals of Sonar in 1957 as chief research consultant at the US Navy Underwater Sound Laboratory. He held this position until 1959 when he became technical director, a position he held until mandatory retirement in 1963.[20][21]
Materials and designs in the US and Japan
There was little progress in US sonar from 1915 to 1940. In 1940, US sonars typically consisted of a magnetostrictive transducer and an array of nickel tubes connected to a 1-foot-diameter steel plate attached back-to-back to a Rochelle salt crystal in a spherical housing. This assembly penetrated the ship hull and was manually rotated to the desired angle. The piezoelectric Rochelle salt crystal had better parameters, but the magnetostrictive unit was much more reliable. High losses to US merchant supply shipping early in World War II led to large scale high priority US research in the field, pursuing both improvements in magnetostrictive transducer parameters and Rochelle salt reliability. Ammonium dihydrogen phosphate (ADP), a superior alternative, was found as a replacement for Rochelle salt; the first application was a replacement of the 24 kHz Rochelle-salt transducers. Within nine months, Rochelle salt was obsolete. The ADP manufacturing facility grew from few dozen personnel in early 1940 to several thousands in 1942.
One of the earliest application of ADP crystals were hydrophones for acoustic mines; the crystals were specified for low-frequency cutoff at 5 Hz, withstanding mechanical shock for deployment from aircraft from 3,000 m (10,000 ft), and ability to survive neighbouring mine explosions. One of key features of ADP reliability is its zero aging characteristics; the crystal keeps its parameters even over prolonged storage.
Another application was for acoustic homing torpedoes. Two pairs of directional hydrophones were mounted on the torpedo nose, in the horizontal and vertical plane; the difference signals from the pairs were used to steer the torpedo left-right and up-down. A countermeasure was developed: the targeted submarine discharged an effervescent chemical, and the torpedo went after the noisier fizzy decoy. The counter-countermeasure was a torpedo with active sonar – a transducer was added to the torpedo nose, and the microphones were listening for its reflected periodic tone bursts. The transducers comprised identical rectangular crystal plates arranged to diamond-shaped areas in staggered rows.
Passive sonar arrays for submarines were developed from ADP crystals. Several crystal assemblies were arranged in a steel tube, vacuum-filled with castor oil, and sealed. The tubes then were mounted in parallel arrays.
The standard US Navy scanning sonar at the end of World War II operated at 18 kHz, using an array of ADP crystals. Desired longer range, however, required use of lower frequencies. The required dimensions were too big for ADP crystals, so in the early 1950s magnetostrictive and barium titanate piezoelectric systems were developed, but these had problems achieving uniform impedance characteristics, and the beam pattern suffered. Barium titanate was then replaced with more stable lead zirconate titanate (PZT), and the frequency was lowered to 5 kHz. The US fleet used this material in the AN/SQS-23 sonar for several decades. The SQS-23 sonar first used magnetostrictive nickel transducers, but these weighed several tons, and nickel was expensive and considered a critical material; piezoelectric transducers were therefore substituted. The sonar was a large array of 432 individual transducers. At first, the transducers were unreliable, showing mechanical and electrical failures and deteriorating soon after installation; they were also produced by several vendors, had different designs, and their characteristics were different enough to impair the array's performance. The policy to allow repair of individual transducers was then sacrificed, and "expendable modular design", sealed non-repairable modules, was chosen instead, eliminating the problem with seals and other extraneous mechanical parts.[22]
The Imperial Japanese Navy at the onset of World War II used projectors based on quartz. These were big and heavy, especially if designed for lower frequencies; the one for Type 91 set, operating at 9 kHz, had a diameter of 30 inches (760 mm) and was driven by an oscillator with 5 kW power and 7 kV of output amplitude. The Type 93 projectors consisted of solid sandwiches of quartz, assembled into spherical cast iron bodies. The Type 93 sonars were later replaced with Type 3, which followed German design and used magnetostrictive projectors; the projectors consisted of two rectangular identical independent units in a cast-iron rectangular body about 16 by 9 inches (410 mm × 230 mm). The exposed area was half the wavelength wide and three wavelengths high. The magnetostrictive cores were made from 4 mm stampings of nickel, and later of an iron-aluminium alloy with aluminium content between 12.7% and 12.9%. The power was provided from a 2 kW at 3.8 kV, with polarization from a 20 V, 8 A DC source.
The passive hydrophones of the Imperial Japanese Navy were based on moving-coil design, Rochelle salt piezo transducers, and carbon microphones.[23]
Later developments in transducers
Magnetostrictive transducers were pursued after World War II as an alternative to piezoelectric ones. Nickel scroll-wound ring transducers were used for high-power low-frequency operations, with size up to 13 feet (4.0 m) in diameter, probably the largest individual sonar transducers ever. The advantage of metals is their high tensile strength and low input electrical impedance, but they have electrical losses and lower coupling coefficient than PZT, whose tensile strength can be increased by prestressing. Other materials were also tried; nonmetallic ferrites were promising for their low electrical conductivity resulting in low eddy current losses, Metglas offered high coupling coefficient, but they were inferior to PZT overall. In the 1970s, compounds of rare earths and iron were discovered with superior magnetomechanic properties, namely the Terfenol-D alloy. This made possible new designs, e.g. a hybrid magnetostrictive-piezoelectric transducer. The most recent of these improved magnetostrictive materials is Galfenol.
Other types of transducers include variable-reluctance (or moving-armature, or electromagnetic) transducers, where magnetic force acts on the surfaces of gaps, and moving coil (or electrodynamic) transducers, similar to conventional speakers; the latter are used in underwater sound calibration, due to their very low resonance frequencies and flat broadband characteristics above them.[24]
Active sonar

Active sonar uses a sound transmitter (or projector) and a receiver. When the two are in the same place it is monostatic operation. When the transmitter and receiver are separated it is bistatic operation.[25] When more transmitters (or more receivers) are used, again spatially separated, it is multistatic operation. Most sonars are used monostatically with the same array often being used for transmission and reception.[26] Active sonobuoy fields may be operated multistatically.
Active sonar creates a pulse of sound, often called a "ping", and then listens for reflections (echo) of the pulse. This pulse of sound is generally created electronically using a sonar projector consisting of a signal generator, power amplifier and electro-acoustic transducer/array.[27] A transducer is a device that can transmit and receive acoustic signals ("pings"). A beamformer is usually employed to concentrate the acoustic power into a beam, which may be swept to cover the required search angles. Generally, the electro-acoustic transducers are of the Tonpilz type and their design may be optimised to achieve maximum efficiency over the widest bandwidth, in order to optimise performance of the overall system. Occasionally, the acoustic pulse may be created by other means, e.g. chemically using explosives, airguns or plasma sound sources.
To measure the distance to an object, the time from transmission of a pulse to reception is measured and converted into a range using the known speed of sound.[28] To measure the bearing, several hydrophones are used, and the set measures the relative arrival time to each, or with an array of hydrophones, by measuring the relative amplitude in beams formed through a process called beamforming. Use of an array reduces the spatial response so that to provide wide cover multibeam systems are used. The target signal (if present) together with noise is then passed through various forms of signal processing,[29] which for simple sonars may be just energy measurement. It is then presented to some form of decision device that calls the output either the required signal or noise. This decision device may be an operator with headphones or a display, or in more sophisticated sonars this function may be carried out by software. Further processes may be carried out to classify the target and localise it, as well as measuring its velocity.
The pulse may be at constant frequency or a chirp of changing frequency (to allow pulse compression on reception). Simple sonars generally use the former with a filter wide enough to cover possible Doppler changes due to target movement, while more complex ones generally include the latter technique. Since digital processing became available pulse compression has usually been implemented using digital correlation techniques. Military sonars often have multiple beams to provide all-round cover while simple ones only cover a narrow arc, although the beam may be rotated, relatively slowly, by mechanical scanning.
Particularly when single frequency transmissions are used, the Doppler effect can be used to measure the radial speed of a target. The difference in frequency between the transmitted and received signal is measured and converted into a velocity. Since Doppler shifts can be introduced by either receiver or target motion, allowance has to be made for the radial speed of the searching platform.
One useful small sonar is similar in appearance to a waterproof flashlight. The head is pointed into the water, a button is pressed, and the device displays the distance to the target. Another variant is a "fishfinder" that shows a small display with shoals of fish. Some civilian sonars (which are not designed for stealth) approach active military sonars in capability, with three-dimensional displays of the area near the boat.
When active sonar is used to measure the distance from the transducer to the bottom, it is known as echo sounding. Similar methods may be used looking upward for wave measurement.
Active sonar is also used to measure distance through water between two sonar transducers or a combination of a hydrophone (underwater acoustic microphone) and projector (underwater acoustic speaker). When a hydrophone/transducer receives a specific interrogation signal it responds by transmitting a specific reply signal. To measure distance, one transducer/projector transmits an interrogation signal and measures the time between this transmission and the receipt of the other transducer/hydrophone reply. The time difference, scaled by the speed of sound through water and divided by two, is the distance between the two platforms. This technique, when used with multiple transducers/hydrophones/projectors, can calculate the relative positions of static and moving objects in water.
In combat situations, an active pulse can be detected by an enemy and will reveal a submarine's position at twice the maximum distance that the submarine can itself detect a contact and give clues as to the submarine's identity based on the characteristics of the outgoing ping. For these reasons, active sonar is not frequently used by military submarines.
A very directional, but low-efficiency, type of sonar (used by fisheries, military, and for port security) makes use of a complex nonlinear feature of water known as non-linear sonar, the virtual transducer being known as a parametric array.
Project Artemis
Project Artemis was an experimental research and development project in the late 1950s to mid 1960s to examine acoustic propagation and signal processing for a low-frequency active sonar system that might be used for ocean surveillance. A secondary objective was examination of engineering problems of fixed active bottom systems.[30] The receiving array was located on the slope of Plantagnet Bank off Bermuda. The active source array was deployed from the converted World War II tanker USNS Mission Capistrano.[31] Elements of Artemis were used experimentally after the main experiment was terminated.
Transponder
This is an active sonar device that receives a specific stimulus and immediately (or with a delay) retransmits the received signal or a predetermined one. Transponders can be used to remotely activate or recover subsea equipment.[32]
Performance prediction
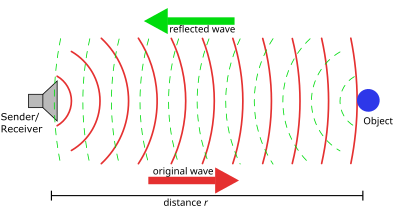
A sonar target is small relative to the sphere, centred around the emitter, on which it is located. Therefore, the power of the reflected signal is very low, several orders of magnitude less than the original signal. Even if the reflected signal was of the same power, the following example (using hypothetical values) shows the problem: Suppose a sonar system is capable of emitting a 10,000 W/m2 signal at 1 m, and detecting a 0.001 W/m2 signal. At 100 m the signal will be 1 W/m2 (due to the inverse-square law). If the entire signal is reflected from a 10 m2 target, it will be at 0.001 W/m2 when it reaches the emitter, i.e. just detectable. However, the original signal will remain above 0.001 W/m2 until 3000 m. Any 10 m2 target between 100 and 3000 m using a similar or better system would be able to detect the pulse, but would not be detected by the emitter. The detectors must be very sensitive to pick up the echoes. Since the original signal is much more powerful, it can be detected many times further than twice the range of the sonar (as in the example).
Active sonar have two performance limitations: due to noise and reverberation. In general, one or other of these will dominate, so that the two effects can be initially considered separately.
In noise-limited conditions at initial detection:[33]
- SL − 2PL + TS − (NL − AG) = DT,
where SL is the source level, PL is the propagation loss (sometimes referred to as transmission loss), TS is the target strength, NL is the noise level, AG is the array gain of the receiving array (sometimes approximated by its directivity index) and DT is the detection threshold.
In reverberation-limited conditions at initial detection (neglecting array gain):
- SL − 2PL + TS = RL + DT,
where RL is the reverberation level, and the other factors are as before.
Hand-held sonar for use by a diver
- The LIMIS (limpet mine imaging sonar) is a hand-held or ROV-mounted imaging sonar for use by a diver. Its name is because it was designed for patrol divers (combat frogmen or clearance divers) to look for limpet mines in low visibility water.
- The LUIS (lensing underwater imaging system) is another imaging sonar for use by a diver.
- There is or was a small flashlight-shaped handheld sonar for divers, that merely displays range.
- For the INSS (integrated navigation sonar system)
Upward looking sonar
An upward looking sonar (ULS) is a sonar device pointed upwards looking towards the surface of the sea. It is used for similar purposes as downward looking sonar, but has some unique applications such as measuring sea ice thickness, roughness and concentration,[34][35] or measuring air entrainment from bubble plumes during rough seas. Often it is moored on the bottom of the ocean or floats on a taut line mooring at a constant depth of perhaps 100 m. They may also be used by submarines, AUVs, and floats such as the Argo float.[36]
Passive sonar
This section includes a list of general references, but it lacks sufficient corresponding inline citations. (October 2023) |
Passive sonar listens without transmitting.[37] It is often employed in military settings, although it is also used in science applications, e.g., detecting fish for presence/absence studies in various aquatic environments – see also passive acoustics and passive radar. In the very broadest usage, this term can encompass virtually any analytical technique involving remotely generated sound, though it is usually restricted to techniques applied in an aquatic environment.
Identifying sound sources
Passive sonar has a wide variety of techniques for identifying the source of a detected sound. For example, U.S. vessels usually operate 60 Hertz (Hz) alternating current power systems. If transformers or generators are mounted without proper vibration insulation from the hull or become flooded, the 60 Hz sound from the windings can be emitted from the submarine or ship. This can help to identify its nationality, as all European submarines and nearly every other nation's submarine have 50 Hz power systems. Intermittent sound sources (such as a wrench being dropped), called "transients," may also be detectable to passive sonar. Until fairly recently,[when?] an experienced, trained operator identified signals, but now computers may do this.
Passive sonar systems may have large sonic databases, but the sonar operator usually finally classifies the signals manually. A computer system frequently uses these databases to identify classes of ships, actions (i.e. the speed of a ship, or the type of weapon released and the most effective countermeasures to employ), and even particular ships.
Noise limitations
Passive sonar on vehicles is usually severely limited because of noise generated by the vehicle. For this reason, many submarines operate nuclear reactors that can be cooled without pumps, using silent convection, or fuel cells or batteries, which can also run silently. Vehicles' propellers are also designed and precisely machined to emit minimal noise. High-speed propellers often create tiny bubbles in the water, and this cavitation has a distinct sound.
The sonar hydrophones may be towed behind the ship or submarine in order to reduce the effect of noise generated by the watercraft itself. Towed units also combat the thermocline, as the unit may be towed above or below the thermocline.
The display of most passive sonars used to be a two-dimensional waterfall display. The horizontal direction of the display is bearing. The vertical is frequency, or sometimes time. Another display technique is to color-code frequency-time information for bearing. More recent displays are generated by the computers, and mimic radar-type plan position indicator displays.
Performance prediction
Unlike active sonar, only one-way propagation is involved. Because of the different signal processing used, the minimal detectable signal-to-noise ratio will be different. The equation for determining the performance of a passive sonar is[38][33]
- SL − PL = NL − AG + DT,
where SL is the source level, PL is the propagation loss, NL is the noise level, AG is the array gain and DT is the detection threshold. The figure of merit of a passive sonar is
- FOM = SL + AG − (NL + DT).
Performance factors
The detection, classification and localisation performance of a sonar depends on the environment and the receiving equipment, as well as the transmitting equipment in an active sonar or the target radiated noise in a passive sonar.
Sound propagation
Sonar operation is affected by variations in sound speed, particularly in the vertical plane. Sound travels more slowly in fresh water than in sea water, though the difference is small. The speed is determined by the water's bulk modulus and mass density. The bulk modulus is affected by temperature, dissolved impurities (usually salinity), and pressure. The density effect is small. The speed of sound (in feet per second) is approximately:
- 4388 + (11.25 × temperature (in °F)) + (0.0182 × depth (in feet)) + salinity (in parts-per-thousand ).
This empirically derived approximation equation is reasonably accurate for normal temperatures, concentrations of salinity and the range of most ocean depths. Ocean temperature varies with depth, but at between 30 and 100 meters there is often a marked change, called the thermocline, dividing the warmer surface water from the cold, still waters that make up the rest of the ocean. This can frustrate sonar, because a sound originating on one side of the thermocline tends to be bent, or refracted, through the thermocline. The thermocline may be present in shallower coastal waters. However, wave action will often mix the water column and eliminate the thermocline. Water pressure also affects sound propagation: higher pressure increases the sound speed, which causes the sound waves to refract away from the area of higher sound speed. The mathematical model of refraction is called Snell's law.
If the sound source is deep and the conditions are right, propagation may occur in the 'deep sound channel'. This provides extremely low propagation loss to a receiver in the channel. This is because of sound trapping in the channel with no losses at the boundaries. Similar propagation can occur in the 'surface duct' under suitable conditions. However, in this case there are reflection losses at the surface.
In shallow water propagation is generally by repeated reflection at the surface and bottom, where considerable losses can occur.
Sound propagation is affected by absorption in the water itself as well as at the surface and bottom. This absorption depends upon frequency, with several different mechanisms in sea water. Long-range sonar uses low frequencies to minimise absorption effects.
The sea contains many sources of noise that interfere with the desired target echo or signature. The main noise sources are waves and shipping. The motion of the receiver through the water can also cause speed-dependent low frequency noise.
Scattering
When active sonar is used, scattering occurs from small objects in the sea as well as from the bottom and surface. This can be a major source of interference. This acoustic scattering is analogous to the scattering of the light from a car's headlights in fog: a high-intensity pencil beam will penetrate the fog to some extent, but broader-beam headlights emit much light in unwanted directions, much of which is scattered back to the observer, overwhelming that reflected from the target ("white-out"). For analogous reasons active sonar needs to transmit in a narrow beam to minimize scattering.

The scattering of sonar from objects (mines, pipelines, zooplankton, geological features, fish etc.) is how active sonar detects them, but this ability can be masked by strong scattering from false targets, or 'clutter'. Where they occur (under breaking waves;[40] in ship wakes; in gas emitted from seabed seeps and leaks[41] etc.), gas bubbles are powerful sources of clutter, and can readily hide targets. TWIPS (Twin Inverted Pulse Sonar)[42][43][44] is currently the only sonar that can overcome this clutter problem.

This is important as many recent conflicts have occurred in coastal waters, and the inability to detect whether mines are present or not present hazards and delays to military vessels, and also to aid convoys and merchant shipping trying to support the region long after the conflict has ceased.[42]
Target characteristics
The sound reflection characteristics of the target of an active sonar, such as a submarine, are known as its target strength. A complication is that echoes are also obtained from other objects in the sea such as whales, wakes, schools of fish and rocks.
Passive sonar detects the target's radiated noise characteristics. The radiated spectrum comprises a continuous spectrum of noise with peaks at certain frequencies which can be used for classification.
Countermeasures
Active (powered) countermeasures may be launched by a vessel under attack to raise the noise level, provide a large false target, and obscure the signature of the vessel itself.
Passive (i.e., non-powered) countermeasures include:
- Mounting noise-generating devices on isolating devices.
- Sound-absorbent coatings on the hulls of submarines, for example anechoic tiles.
Military applications
Modern naval warfare makes extensive use of both passive and active sonar from water-borne vessels, aircraft and fixed installations. Although active sonar was used by surface craft in World War II, submarines avoided the use of active sonar due to the potential for revealing their presence and position to enemy forces. However, the advent of modern signal-processing enabled the use of passive sonar as a primary means for search and detection operations. In 1987 a division of Japanese company Toshiba reportedly[45] sold machinery to the Soviet Union that allowed their submarine propeller blades to be milled so that they became radically quieter, making the newer generation of submarines more difficult to detect.
Использование подводной лодкой активного гидролокатора для определения пеленга крайне редко и не обязательно дает высококачественную информацию о пеленге или дальности для группы управления огнем подводной лодки. Однако использование активной гидролокации на надводных кораблях очень распространено и используется подводными лодками, когда тактическая ситуация диктует, что более важно определить положение подводной лодки противника, чем скрыть собственное положение. В случае с надводными кораблями можно предположить, что угроза уже отслеживает корабль по спутниковым данным, поскольку любое судно, находящееся рядом с излучающим гидролокатором, обнаружит излучение. Услышав сигнал, легко определить используемое гидроакустическое оборудование (обычно по его частоте) и его положение (по энергии звуковой волны). Активный гидролокатор похож на радар тем, что, хотя он и позволяет обнаруживать цели на определенном расстоянии, он также позволяет обнаруживать излучатель на гораздо большем расстоянии, что нежелательно.
Поскольку активный гидролокатор выявляет присутствие и положение оператора и не позволяет точно классифицировать цели, его используют быстроходные (самолеты, вертолеты) и шумные платформы (большинство надводных кораблей), но редко - подводные лодки. Когда активный гидролокатор используется надводными кораблями или подводными лодками, он обычно активируется на очень короткое время с перерывами, чтобы минимизировать риск обнаружения. Следовательно, активный гидролокатор обычно считается резервной копией пассивного гидролокатора. В авиации активная гидролокация применяется в виде одноразовых гидроакустических буев , которые сбрасываются в районе патрулирования самолета или в районе возможных гидролокационных контактов противника.
Пассивный эхолот имеет ряд преимуществ, самое главное – он бесшумный. Если уровень излучаемого цели шума достаточно высок, он может иметь большую дальность действия, чем активный гидролокатор, и позволяет идентифицировать цель. Поскольку любой моторизованный объект издает некоторый шум, его в принципе можно обнаружить, в зависимости от уровня издаваемого шума и уровня окружающего шума в данном районе, а также от используемой технологии. Если упростить, с его помощью пассивный гидролокатор «видит» вокруг корабля. На подводной лодке пассивный гидролокатор, установленный в носовой части, обнаруживает в направлениях около 270 ° с центром в плоскости корабля, установленный на корпусе блок - около 160 ° с каждого борта, а буксируемый блок - на полные 360 °. Невидимые области возникают из-за помех самого корабля. Как только сигнал обнаружен в определенном направлении (что означает, что что-то издает звук в этом направлении, это называется широкополосным обнаружением), можно увеличить масштаб и проанализировать полученный сигнал (узкополосный анализ). Обычно это делается с помощью преобразования Фурье , чтобы показать различные частоты, составляющие звук. Поскольку каждый двигатель издает определенный звук, идентифицировать объект несложно. Базы данных уникальных звуков двигателей являются частью так называемого акустическая разведка или ACINT.
цели Еще одно применение пассивного гидролокатора — определение траектории . Этот процесс называется анализом движения цели (TMA), и результирующим «решением» является дальность, курс и скорость цели. ТМА выполняется путем маркировки направления звука в разное время и сравнения движения с движением собственного корабля оператора. Изменения относительного движения анализируются с использованием стандартных геометрических методов вместе с некоторыми предположениями о предельных случаях.
Пассивный гидролокатор скрытен и очень полезен. Однако он требует высокотехнологичных электронных компонентов и является дорогостоящим. Обычно он устанавливается на дорогих кораблях в виде решеток для улучшения обнаружения. Надводные корабли используют это с пользой; еще лучше его используют подводные лодки , а также самолеты и вертолеты, в основном для «эффекта неожиданности», поскольку подводные лодки могут скрываться под тепловыми слоями. Если командир подводной лодки считает, что он один, он может поднять свою лодку ближе к поверхности, чтобы ее было легче обнаружить, или пойти глубже и быстрее и, таким образом, издать больше шума.
Ниже приведены примеры применения гидролокаторов в военных целях. Многие из гражданских применений, описанных в следующем разделе, также могут быть применимы к использованию на военно-морском флоте.
Противолодочная война

До недавнего времени корабельные гидролокаторы обычно изготавливались с установленными на корпусе антеннами либо в миделе, либо в носовой части корабля. Вскоре после их первоначального использования было обнаружено, что необходимы средства снижения шума потока. Первые изготавливались из холста на каркасе, затем стали использовать стальные. Сейчас купола обычно изготавливают из армированного пластика или герметизированной резины. Такие гидролокаторы преимущественно активны в работе. Примером обычного гидролокатора, установленного на корпусе, является SQS-56.
Из-за проблем с корабельным шумом также используются буксируемые гидролокаторы. Их преимущество заключается в том, что их можно размещать глубже в воде, но есть ограничения на их использование на мелководье. Их называют буксируемыми решетками (линейными) или гидролокаторами переменной глубины (VDS) с 2/3D решетками. Проблема в том, что лебедки, необходимые для их развертывания/восстановления, большие и дорогие. Комплекты VDS преимущественно активны в работе, а буксируемые — пассивны.
Примером современного активно-пассивного корабельного гидролокатора является Sonar 2087 производства Thales Underwater Systems .
Торпеды
Современные торпеды обычно оснащены активным/пассивным гидролокатором. Это можно использовать для наведения непосредственно на цель, но с самонаводящимся следом также используются торпеды . Ранним примером акустического Гомера была торпеда Mark 37 .
Средства противодействия торпедам могут быть буксируемыми или свободными. Ранним примером было немецкое устройство Sieglinde , а Bold было химическим устройством. Широко используемым в США устройством был буксируемый AN/SLQ-25 Nixie , а мобильный имитатор подводной лодки (MOSS) был бесплатным устройством. Современной альтернативой системе Nixie является система противоторпедной защиты надводных кораблей S2170 Королевского флота Великобритании .
Мины
Мины могут быть оснащены гидролокатором для обнаружения, локализации и распознавания необходимой цели. Примером может служить шахта CAPTOR .
Противоминные меры
Гидролокатор противоминной защиты (MCM), иногда называемый «гидролокатором предотвращения мин и препятствий (MOAS)», представляет собой специализированный тип гидролокатора, используемый для обнаружения небольших объектов. Большинство гидролокаторов MCM монтируются на корпусе, но некоторые типы имеют конструкцию VDS. Примером гидролокатора MCM, установленного на корпусе, является тип 2193, а гидролокатор для поиска мин SQQ-32 и системы типа 2093 представляют собой конструкции VDS.
Подводное плавание
Подводные лодки полагаются на гидролокатор в большей степени, чем надводные корабли, поскольку они не могут использовать радар в воде. Гидроакустические группы могут устанавливаться на корпусе или буксироваться. Информация о типовых посадках приведена для «Оясио» подводных лодок класса и «Swiftsure подводных лодок класса » .
Самолет

Вертолеты могут использоваться для противолодочной борьбы путем развертывания полей активно-пассивных гидроакустических буев или могут управлять погружаемым гидролокатором, таким как AQS-13 . Самолеты с неподвижным крылом также могут развертывать гидроакустические буи и обладают большей выносливостью и возможностями для их развертывания. Обработка данных с гидроакустических буев или погружающегося гидролокатора может осуществляться как на самолете, так и на корабле. Преимущество погружающегося гидролокатора состоит в том, что его можно развернуть на глубину, соответствующую повседневным условиям. Вертолеты также использовались для противоминных операций с использованием буксируемых гидролокаторов, таких как AQS-20A .
Подводная связь
На корабли и подводные лодки могут быть установлены специальные гидролокаторы для подводной связи.
Наблюдение за океаном
Соединенные Штаты начали систему пассивных стационарных систем наблюдения за океаном в 1950 году под секретным названием Sound Surveillance System (SOSUS) совместно с Американской телефонной и телеграфной компанией (AT&T), с ее исследовательской лабораторией Bell и производственными предприятиями Western Electric, заключившими контракт на разработку и установка. В системах использовался канал SOFAR , также известный как канал глубокого звука, где минимальная скорость звука создает волновод , по которому низкочастотный звук распространяется на тысячи миль. Анализ был основан на звуковом спектрографе AT&T, который преобразовывал звук в визуальную спектрограмму, представляющую собой частотно-временной анализ звука, который был разработан для анализа речи и модифицирован для анализа низкочастотных подводных звуков. Этот процесс назывался низкочастотным анализом и записью , а оборудование называлось низкочастотным анализатором и регистратором, что обозначалось аббревиатурой LOFAR. Исследование LOFAR получило название «Иезавель» и привело к его использованию в воздушных и наземных системах, особенно в гидроакустических буях, использующих этот процесс, а иногда и с использованием «Иезавель» в своем названии. [ 46 ] [ 47 ] [ 48 ] [ 49 ] Предложенная система предлагала настолько многообещающие возможности обнаружения подводных лодок на большом расстоянии, что ВМФ приказал немедленно принять меры по ее внедрению. [ 47 ] [ 50 ]

Между установкой испытательной установки и полномасштабным прототипом оперативной установки из сорока элементов в 1951 и 1958 годах системы были установлены в Атлантике, а затем в Тихом океане под несекретным названием « Проект Цезарь» . Первоначальные системы были отключены на секретных береговых станциях, обозначенных как Военно-морской комплекс (NAVFAC), которые, как объяснялось, занимались «океаническими исследованиями» для прикрытия своей секретной миссии. Система несколько раз модернизировалась с использованием более совершенного кабеля, позволяющего устанавливать массивы в океанских бассейнах, и модернизировала обработку. Береговые станции были ликвидированы в процессе консолидации и перенаправления массивов в центральные центры обработки в 1990-х годах. В 1985 году, когда в эксплуатацию вступили новые мобильные комплексы и другие системы, общее название системы было изменено на «Интегрированная система подводного наблюдения» (IUSS). В 1991 году предназначение системы было рассекречено. За год до того, как знаки различия IUSS были разрешены к ношению. Доступ к некоторым системам был предоставлен для проведения научных исследований. [ 46 ] [ 47 ]
Считается, что аналогичная система действовала в Советском Союзе.
Подводная безопасность
Сонар можно использовать для обнаружения водолазов и других аквалангистов . Это может быть применимо вокруг кораблей или у входов в порты. Активный гидролокатор также может использоваться в качестве механизма сдерживания и/или выведения из строя. Одним из таких устройств является система «Цербер» .

Ручной эхолот
Гидролокатор для обнаружения мин (LIMIS) - это портативный или установленный на дистанционно управляемом аппарате гидролокатор, предназначенный для патрульных водолазов (боевых водолазов или водолазов-разведчиков ) для поиска мин в условиях плохой видимости .
LUIS — еще один гидролокатор визуализации, используемый дайвером.
Интегрированная навигационная гидролокационная система (INSS) представляет собой небольшой портативный гидролокатор в форме фонарика для дайверов, отображающий дальность действия. [ 51 ] [ 52 ]
Гидролокатор перехвата
Это гидролокатор, предназначенный для обнаружения и определения местонахождения сигналов от активных гидролокаторов противника. Примером этого является Тип 2082, установленный на британских Vanguard подводных лодках класса .
Гражданские приложения
Рыболовство
Рыболовство является важной отраслью, спрос на которую растет, но мировой объем улова падает из-за серьезных проблем с ресурсами. точка устойчивости В будущем отрасль будет продолжаться всемирная консолидация до тех пор, пока не будет достигнута . Однако консолидация рыболовных флотов приводит к увеличению спроса на сложную электронику для поиска рыбы, такую как датчики, эхолоты и гидролокаторы. Исторически сложилось так, что рыбаки использовали множество различных методов для поиска и добычи рыбы. Однако акустические технологии стали одной из наиболее важных движущих сил развития современного коммерческого рыболовства.
рыбы Звуковые волны распространяются через рыбу иначе, чем через воду, потому что заполненный воздухом плавательный пузырь имеет другую плотность, чем морская вода. Эта разница в плотности позволяет обнаруживать косяки рыб с помощью отраженного звука. Акустическая технология особенно хорошо подходит для применения под водой, поскольку под водой звук распространяется дальше и быстрее, чем в воздухе. Сегодня коммерческие рыболовные суда почти полностью полагаются на акустический гидролокатор и эхолоты для обнаружения рыбы. Рыбаки также используют активные гидролокаторы и эхолоты для определения глубины воды, контура дна и состава дна.

Такие компании, как eSonar, Raymarine , Marport Canada, Wesmar, Furuno, Krupp и Simrad, производят разнообразные гидролокаторы и акустические инструменты для глубоководного коммерческого рыболовства. Например, сетевые датчики проводят различные подводные измерения и передают информацию обратно на приемник на борту судна. Каждый датчик оснащен одним или несколькими акустическими преобразователями в зависимости от его конкретной функции. Данные передаются от датчиков с помощью беспроводной акустической телеметрии и принимаются гидрофоном, установленным на корпусе. Аналоговые сигналы декодируются и преобразуются цифровым акустическим приемником в данные, которые передаются на мостовой компьютер для графического отображения на мониторе высокого разрешения.
Эхо зондирование
Эхолотирование – это процесс, используемый для определения глубины воды под кораблями и лодками. Разновидность активного гидролокатора, эхолотирование, представляет собой передачу акустического импульса непосредственно вниз на морское дно с измерением времени между передачей и возвратом эха после достижения дна и отражения обратно к кораблю, откуда он исходил. Акустический импульс излучается преобразователем, который также принимает обратное эхо. Измерение глубины рассчитывается путем умножения скорости звука в воде (в среднем 1500 метров в секунду) на время между излучением и возвращением эха. [ 53 ]
Значение подводной акустики для рыбной промышленности привело к разработке других акустических инструментов, которые действуют аналогично эхолотам, но, поскольку их функции немного отличаются от исходной модели эхолота, им были присвоены другие условия.
Чистое местоположение
Сетевой эхолот представляет собой эхолот с преобразователем, установленным на носу сети, а не на дне судна. Тем не менее, чтобы учесть расстояние от преобразователя до блока индикации, которое значительно больше, чем в обычном эхолоте, приходится сделать несколько доработок. Доступны два основных типа. Первый — это тип кабеля, в котором сигналы передаются по кабелю. В этом случае необходимо предусмотреть кабельный барабан, на котором можно будет буксировать, снимать и укладывать кабель на различных этапах операции. Второй тип — это бескабельный сетевой эхолот, такой как Marport's Trawl Explorer, в котором сигналы передаются акустически между сетью и приемником-гидрофоном, установленным на корпусе судна. В этом случае кабельный барабан не требуется, но необходима сложная электроника на преобразователе и приемнике.
, установленным на корпусе эхолота На дисплее эхолота отображается расстояние от сети до дна (или поверхности), а не глубина воды, как в случае с датчиком . Обычно можно увидеть веревку, прикрепленную к заголовку сетки, что указывает на производительность сетки. Также можно увидеть любую рыбу, попадающую в сеть, что позволяет выполнить точную настройку, чтобы поймать как можно больше рыбы. В других промыслах, где количество рыбы в сети имеет большое значение, датчики улова устанавливаются в различных местах на тресковом конце сети. По мере заполнения трески датчики улова срабатывают один за другим, и эта информация передается акустически на мониторы на мостике судна. Затем шкипер может решить, когда вытаскивать сеть.
Современные версии эхолота, в которых используются многоэлементные преобразователи, функционируют скорее как гидролокатор, чем эхолот, и показывают фрагменты территории перед сетью, а не просто вертикальный вид, который использовался в первоначальных эхолотах.
Гидролокатор представляет собой эхолот с функцией направленного действия, который может показывать рыбу или другие объекты вокруг судна.
ROV и UUV
Небольшие гидролокаторы были установлены на дистанционно управляемых аппаратах (ROV) и необитаемых подводных аппаратах (UUV), чтобы обеспечить их работу в пасмурных условиях. Эти гидролокаторы используются для наблюдения за автомобилем впереди. Система долгосрочной минной разведки представляет собой БПА для целей MCM.
Местоположение автомобиля
На самолетах устанавливаются гидролокаторы, которые действуют как маяки и позволяют определить их местонахождение в случае крушения в море. Для определения местоположения можно использовать гидролокаторы с короткой и длинной базой, например LBL .
Протез для слабовидящих
В 2013 году изобретатель из США представил боди с «паучьим чутьем», оснащенное ультразвуковыми датчиками и системами тактильной обратной связи , которые предупреждают владельца о приближающихся угрозах; позволяя им реагировать на нападавших даже с завязанными глазами. [ 54 ]
Научные применения
Оценка биомассы
Обнаружение рыб и других морских и водных обитателей и оценка их индивидуальных размеров или общей биомассы с использованием активных гидролокаторов. Звуковые импульсы отражаются от любого объекта, плотность которого отличается от плотности окружающей среды. Сюда относится рыба, а точнее, заполненный воздухом плавательный пузырь рыбы. [ 55 ] Эти эхо-сигналы предоставляют информацию о размере, местоположении, численности и поведении рыбы. Это особенно эффективно для плавательных пузырей рыб (например, сельди, трески и минтая) и менее полезно для рыб без них (например, акул, скумбрии и камбалы). [ 56 ] Данные из толщи воды обычно обрабатываются иначе, чем данные морского дна или обнаружения объектов. Этот тип данных можно обрабатывать с помощью специального программного обеспечения. [ 55 ]
Измерение волн
Для измерения высоты и периода волн можно использовать направленный вверх эхолот, установленный на дне или на платформе. На основе этой статистики можно получить статистику состояния поверхности в определенном месте.
Измерение скорости воды
Для измерения скорости воды были разработаны специальные гидролокаторы ближнего действия.
Оценка типа дна
Были разработаны гидролокаторы, которые можно использовать для определения характеристик морского дна, например, на ил, песок и гравий. Относительно простые гидролокаторы, такие как эхолоты, можно использовать в системах классификации морского дна с помощью дополнительных модулей, преобразующих параметры эхолота в тип отложений. Существуют разные алгоритмы, но все они основаны на изменении энергии или формы отраженных звуковых сигналов. Расширенный анализ классификации субстрата может быть достигнут с использованием калиброванных (научных) эхолотов и параметрического или нечетко-логического анализа акустических данных.
Батиметрическое картографирование

Гидролокаторы бокового обзора можно использовать для получения карт топографии морского дна ( батиметрии ), перемещая гидролокатор по нему чуть выше дна. Низкочастотные гидролокаторы, такие как GLORIA, использовались для исследования всего континентального шельфа, тогда как высокочастотные гидролокаторы используются для более детальных исследований меньших территорий.
установленные на корпусе Многолучевые эхолоты, крупных надводных судов, собирают ряды батиметрических данных практически в реальном времени. Один из примеров, система General Instrument «Seabeam», использует массив прожекторов вдоль киля для озвучивания дна веерным лучом. Сигналы от группы гидрофонов, установленных поперек корабля, обрабатываются для синтеза нескольких виртуальных веерных лучей, пересекающих луч проектора под прямым углом.
Сонарная визуализация
Создание двух- и трехмерных изображений с использованием данных сонара.
Этот раздел нуждается в расширении . Вы можете помочь, добавив к нему . ( июль 2024 г. ) |
Поддонное профилирование
Разработаны мощные низкочастотные эхолоты для определения профилей верхних слоев дна океана. Одним из последних устройств является многопреобразовательный параметрический SBP SES-2000 quattro компании Innomar, который используется, например, в заливе Шайба для подводных археологических целей. [ 57 ]
Обнаружение утечек газа с морского дна
Пузырьки газа могут просачиваться с морского дна или вблизи него из нескольких источников. Они могут быть обнаружены как пассивными [ 58 ] и активный сонар [ 41 ] (показано на схематическом рисунке [ 58 ] по желтой и красной системам соответственно).

Происходят естественные выбросы метана и углекислого газа. [ 41 ] Газопроводы могут протекать, и важно иметь возможность обнаружить утечку из объектов улавливания и хранения углерода (CCSF; например, истощенные нефтяные скважины, в которых хранится извлеченный атмосферный углерод). [ 59 ] [ 60 ] [ 61 ] [ 62 ] Количественная оценка количества утечки газа затруднена, и хотя оценки можно сделать с использованием активных и пассивных гидролокаторов, важно поставить под сомнение их точность из-за допущений, присущих составлению таких оценок на основе данных гидролокатора. [ 58 ] [ 63 ]
Гидролокатор с синтезированной апертурой
В лаборатории были созданы различные гидролокаторы с синтезированной апертурой, и некоторые из них начали использоваться в системах поиска мин и поиска. Объяснение их работы дано в гидролокаторе с синтезированной апертурой .
Параметрический эхолот
Параметрические источники используют нелинейность воды для генерации разностной частоты между двумя высокими частотами. Формируется виртуальный массив конечного огня. Такой проектор обладает преимуществами широкой полосы пропускания, узкой ширины луча, а при полной разработке и тщательном измерении у него нет явных боковых лепестков: см. Параметрическая решетка . Его основным недостатком является очень низкий КПД, составляющий всего несколько процентов. [ 64 ] П.Дж. Вестервелт резюмирует связанные с этим тенденции. [ 65 ]
Сонар во внеземном контексте
Использование как активного, так и пассивного гидролокатора было предложено для различных внеземных сред. [ 66 ] Одним из примеров является Титан , где активный гидролокатор может использоваться для определения глубины его углеводородных морей . [ 67 ] и пассивный гидролокатор может быть использован для обнаружения выпадений метана . [ 68 ]
Предложения, которые не учитывают должным образом разницу между земной и внеземной средой, могут привести к ошибочным измерениям. [ 69 ] [ 70 ] [ 71 ] [ 72 ] [ 73 ] [ 74 ]
Экологическое воздействие
| Часть серии о |
| Загрязнение |
|---|
 |
Влияние на морских млекопитающих

Исследования показали, что использование активного гидролокатора может привести к массовому выбросу морских млекопитающих на берег . [ 75 ] Было доказано, что клюворылы , наиболее частые жертвы выбрасывания на берег, очень чувствительны к среднечастотному активному гидролокатору. [ 76 ] Другие морские млекопитающие, такие как синий кит, также убегают от источника гидролокатора. [ 77 ] в то время как военно-морская деятельность была предложена как наиболее вероятная причина массового выброса дельфинов на берег. [ 78 ] Военно-морской флот США, который частично финансировал некоторые исследования, заявил, что результаты показывают только поведенческую реакцию на гидролокатор, а не реальный вред, но они «будут оценивать эффективность [своих] мер по защите морских млекопитающих в свете новых результатов исследований». . [ 75 ] В постановлении Верховного суда США от 2008 года об использовании гидролокатора ВМС США отмечалось, что не было случаев, когда было бы убедительно доказано, что гидролокатор причинил вред морскому млекопитающему или убил его. [ 79 ]
Некоторые морские животные, такие как киты и дельфины , используют эхолокации системы , иногда называемые биосонаром, для обнаружения хищников и добычи. Исследования воздействия гидролокатора на синих китов в заливе Южная Калифорния показывают, что использование гидролокатора средней частоты нарушает пищевое поведение китов. Это указывает на то, что вызванное гидролокатором нарушение кормления и вытеснение из участков с высококачественной добычей может иметь значительные и ранее недокументированные последствия для экологии кормления усатых китов , индивидуальной приспособленности и здоровья популяции. [ 80 ]
В 2019 году был опубликован обзор данных о массовых выбросах клюворылов на берег, связанных с военно-морскими учениями, в которых использовался гидролокатор. В нем был сделан вывод о том, что воздействие среднечастотного активного гидролокатора наиболее сильно на клюворыловых китов Кювье, но варьируется среди отдельных особей или популяций. Обзор показал, что сила реакции отдельных животных может зависеть от того, подвергались ли они ранее воздействию гидролокатора, и что у выброшенных на берег китов были обнаружены симптомы декомпрессионной болезни , которые могут быть результатом такой реакции на гидролокатор. Он отметил, что на Канарских островах, где ранее сообщалось о множественных выбросах на мель, массовых выбрасываний на мель больше не происходило после того, как в этом районе были запрещены военно-морские учения, в ходе которых использовался гидролокатор, и рекомендовал распространить запрет на другие районы, где продолжаются массовые выбросы на мель. происходить. [ 81 ] [ 82 ]
Влияние на рыбу
Низкочастотный эхолот может вызвать небольшой временный сдвиг порога слуха некоторых рыб. [ 83 ] [ 84 ] [ а ]
Частоты и разрешения
Частоты гидролокаторов варьируются от инфразвуковых до мегагерц. Как правило, более низкие частоты имеют больший диапазон, в то время как более высокие частоты обеспечивают лучшее разрешение и меньший размер для заданной направленности.
Для достижения разумной направленности частоты ниже 1 кГц обычно требуют больших размеров, обычно достигаемых с помощью буксируемых антенных решеток. [ 85 ]
Низкочастотные гидролокаторы условно определяются как 1–5 кГц, хотя некоторые военно-морские силы считают 5–7 кГц также низкой частотой. Средняя частота определяется как 5–15 кГц. Другой стиль разделения предполагает, что низкая частота находится ниже 1 кГц, а средняя частота - от 1 до 10 кГц. [ 85 ]
Американские гидролокаторы времен Второй мировой войны работали на относительно высокой частоте 20–30 кГц для достижения направленности с помощью достаточно небольших преобразователей с типичной максимальной рабочей дальностью 2500 ярдов. В послевоенных гидролокаторах использовались более низкие частоты для достижения большей дальности действия; например, SQS-4 работал на частоте 10 кГц с дальностью действия до 5000 ярдов. SQS-26 и SQS-53 работали на частоте 3 кГц с дальностью до 20 000 ярдов; их купола имели размер ок. лодка для личного состава длиной 60 футов — верхний предел размера для обычных корпусных гидролокаторов. Достижение больших размеров за счет размещения конформной гидроакустической группы по корпусу до сих пор не было эффективным, поэтому для более низких частот используются линейные или буксируемые антенные решетки. [ 85 ]
Японские гидролокаторы времен Второй мировой войны работали на разных частотах. Тип 91 с 30-дюймовым кварцевым проектором работал на частоте 9 кГц. Тип 93 с кварцевыми проекторами меньшего размера работал на частоте 17,5 кГц (модель 5 с магнитострикционной частотой 16 или 19 кГц) при мощности от 1,7 до 2,5 киловатт и дальности действия до 6 км. Более поздний Тип 3 с магнитострикционными преобразователями немецкой конструкции работал на частоте 13, 14,5, 16 или 20 кГц (в зависимости от модели), используя сдвоенные преобразователи (кроме модели 1, у которой было три одиночных), при мощности от 0,2 до 2,5 киловатт. В простом типе вместо генераторов использовались магнитострикционные преобразователи с частотой 14,5 кГц и мощностью 0,25 кВт, приводимые в действие емкостным разрядом, с дальностью действия до 2,5 км. [ 23 ]
Разрешение сонара угловое; объекты, расположенные дальше друг от друга, отображаются с более низким разрешением, чем близлежащие.
В другом источнике перечислены диапазоны и разрешения в зависимости от частот для гидролокаторов бокового обзора. 30 кГц обеспечивает низкое разрешение на расстоянии 1000–6000 м, 100 кГц дает среднее разрешение на 500–1000 м, 300 кГц дает высокое разрешение на 150–500 м, а 600 кГц дает высокое разрешение на 75–150 м. На гидролокаторы большей дальности более негативно влияют неоднородности воды. Некоторые среды, обычно мелководье у побережья, имеют сложный рельеф со многими особенностями; там необходимы более высокие частоты. [ 86 ]
См. также
- Перегородки (подводная лодка) - области позади подводной лодки или корабля, где гидролокатор не слышит.
- Гордон Юджин Мартин – американский физик (1925 г.р.), гидроакустический физик
Пояснительные примечания
- ^ Халворсен и др. (2013) пришли к выводу, что наблюдаемые эффекты «обычно были небольшими, даже если рыба находилась рядом с гидролокатором и оставалась там в течение всей продолжительности трех тестовых сигналов».
Цитаты
- ^ Юрген Ровер; Михаил Монаков; Михаил Сергеевич Монаков (2001). Океанский флот Сталина: советская военно-морская стратегия и программы кораблестроения, 1935–1953 гг . Психология Пресс. п. 264. ИСБН 9780714648958 .
- ^ Глоссарий стандартизированных терминов административной практики . АФМ ВВС. Типография правительства США. 1961. с. 129 . Проверено 2 ноября 2022 г.
- ^ Перейти обратно: а б с «Сонар» . Британская энциклопедия . Проверено 18 января 2019 г.
- ^ Рэгг, Дэвид В. (1973). Словарь авиации (первое изд.). Скопа. п. 245. ИСБН 9780850451634 .
- ^ Дэвид Рибас; Пере Ридао; Хосе Нейра (26 июля 2010 г.). Подводный SLAM для структурированных сред с использованием гидролокатора визуализации . Springer Science & Business Media. ISBN 978-3-642-14039-6 .
- ^ Перейти обратно: а б Фэхи, Фрэнк (1998). Основы шума и вибрации . Джон Джерард Уокер. Тейлор и Фрэнсис. п. 375. ИСБН 978-0-419-24180-5 .
- ^ Томас Нейборс, Дэвид Брэдли (редактор), Прикладная подводная акустика: Лейф Бьорно , Elsevier, 2017, ISBN 0128112476 , стр. 8
- ^ М.А. Эйнсли (2010), Принципы моделирования характеристик сонара , Springer, стр. 10
- ^ Перейти обратно: а б Хилл, Миннесота (1962). Физическая океанография . Аллан Р. Робинсон. Издательство Гарвардского университета. п. 498.
- ^ В. Хакманн (1984), Seek and Strike , pn
- ^ Зейтц, Фредерик (1999). Космический изобретатель: Реджинальд Обри Фессенден (1866–1932) . Том. 89. Американское философское общество. стр. 41–46. ISBN 978-0-87169-896-4 .
- ^ Хендрик, Бертон Дж. (август 1914 г.). «Беспроводная связь под водой: замечательное устройство, которое позволяет капитану корабля определять точное местоположение другого корабля даже в самом густом тумане» . Мировая работа: история нашего времени . XLIV (2): 431–434 . Проверено 4 августа 2009 г.
- ^ «Отчет капитана Дж. Х. Куинана из USRC Майами о методе обнаружения айсбергов и проведении непрерывных зондирований». Вестник Гидрографического управления . 13 мая 1914 г. (цитата из стенограммы NOAA, сделанной сотрудниками Центральной библиотеки, апрель 2002 г.) . Архивировано 10 мая 2010 г. в Wayback Machine .
- ^ «Поворотный лук» . Архивировано из оригинала 26 июня 2007 г.
- ^ «Военно-морской словарь времен Второй мировой войны» . Военный корабль США «Эббот» (DD-629) . Архивировано из оригинала 12 декабря 2013 года . Проверено 12 ноября 2019 г. .
- ^ В. Хакманн, Seek & Strike: Sonar, противолодочная борьба и Королевский флот 1914–54 (HMSO, Лондон, 1984).
- ^ Берн, Алан (1993). «Приложение 6». Боевой капитан: Фредерик Джон Уокер Р.Н. и битва за Атлантику (2006, изд. Kindle). Барнсли: Перо и меч. ISBN 978-1-84415-439-5 .
- ^ Хауэт: Глава XXXIX . Вашингтон. 1963.
- ^ «Устная история AIP: Фредерик Винтон Хант, Часть II» . 23 февраля 2015 г.
- ^ из автобиографического очерка доктора Хортона и Центра подводных боевых действий Министерства ВМС США.
- ^ Хортон, Дж. Уоррен (1957). Основы сонара . Военно-морской институт США, Аннаполис, Мэриленд. п. 387.
- ^ Фрэнк Масса. Сонарные датчики: история, заархивированная 18 апреля 2015 г. в Wayback Machine
- ^ Перейти обратно: а б «Японский эхолот и Asdic» (PDF) . Архивировано из оригинала (PDF) 24 сентября 2015 г. Проверено 8 мая 2015 г.
- ^ Шерман, Чарльз Х; Батлер, Джон Л; Браун, Дэвид А. (2008). «Преобразователи и матрицы для подводного звука» . Журнал Акустического общества Америки . 124 (3): 1385. Бибкод : 2008ASAJ..124.1385S . дои : 10.1121/1.2956476 . ISBN 9780387331393 . Архивировано из оригинала 26 апреля 2018 г.
- ^ «Базовая гидролокационная система (активная)» . fas.org . Архивировано из оригинала 22 июня 2020 г. Проверено 22 июня 2020 г.
- ^ Бьёрнё, Лейф (2017). «Голокационные системы». Прикладная подводная акустика . Эльзевир. ISBN 978-0-12-811240-3 .
- ^ Такер, генеральный директор; Газей, Б.К. (1966). Прикладная подводная акустика . Пергамон Пресс.
- ^ Министерство торговли США, Национальное управление океанических и атмосферных исследований. «Исследователь океана NOAA: Технология: Инструменты наблюдения: SONAR» . Oceanexplorer.noaa.gov . Архивировано из оригинала 22 июня 2020 г. Проверено 22 июня 2020 г.
- ^ Авраам, Д.А. (2017). «Обработка сигналов». Прикладная подводная акустика . Эльзевир. ISBN 978-0-12-811240-3 .
- ^ МакКлинтон, AT (7 сентября 1967 г.). Сводный отчет об акустических источниках проекта Artemnis (PDF) (Отчет). Вашингтон, округ Колумбия: Исследовательская лаборатория ВМС США. п. iv. Архивировано (PDF) из оригинала 11 июня 2020 г. Проверено 19 апреля 2020 г.
- ^ Эрскин, Фред Т. III (август 2013 г.). История акустического отдела Военно-морской исследовательской лаборатории за первые восемь десятилетий 1923–2008 гг. (PDF) (Отчет). Вашингтон, округ Колумбия: Военно-морская исследовательская лаборатория. стр. 59–63. Архивировано (PDF) из оригинала 10 июня 2020 г. Проверено 19 апреля 2020 г.
- ^ «Легкий транспондер срабатывания (LAT)» . Сонардин . Архивировано из оригинала 23 июня 2020 г. Проверено 23 июня 2020 г.
- ^ Перейти обратно: а б ISO 18405:2017 Акустика подводная. Терминология. Уравнение сонара, запись 3.6.2.3
- ^ Коннолли, Уильям (29 мая 2005 г.). "Горностай: Морской лед: Чем я занимаюсь в свободное время :-)" . Горностай . Проверено 19 октября 2017 г.
- ^ Фиссель, Д.Б.; Марко, младший; Меллинг, Х. (1 января 2008 г.). «Достижения в области гидролокаторов восходящего обзора для изучения процессов изменения ледового климата Северного Ледовитого океана» . Журнал оперативной океанографии . 1 (1): 9–18. Бибкод : 2008JOO.....1....9F . дои : 10.1080/1755876X.2008.11081884 . ISSN 1755-876X . S2CID 125961523 .
- ^ «Мышление синего моря» . Экономист: Technology Quarterly . 10 марта 2018 г. Архивировано из оригинала 09.11.2020 . Проверено 16 ноября 2020 г.
- ^ «Наука о звуке» . www.usff.navy.mil . Командование ВМС США . Проверено 30 октября 2023 г.
- ^ М. А. Эйнсли (2010), Принципы моделирования характеристик сонара, Springer, стр. 68
- ^ Лейтон, Т.Г.; Коулз, DCH; Срокош, М.; Уайт, PR; Вульф, ДК (2018). «Асимметричный перенос CO2 через нарушенную морскую поверхность» . Научные отчеты . 8 (1): 8301. Бибкод : 2018NatSR...8.8301L . дои : 10.1038/s41598-018-25818-6 . ПМЦ 5974314 . ПМИД 29844316 .
- ^ Вульф, ДК; Торп, Ю.А. (1991). «Выброс метана с морского дна вдоль континентальной окраины Западного Шпицбергена». Дж. Мар. Рес . 49 (3): 435–466. дои : 10.1357/002224091784995765 .
- ^ Перейти обратно: а б с Уэстбрук, Г.К.; Тэтчер, К.Э.; Ролинг, Э.Дж.; Пиотровский, AM; Пялике, Х.; Осборн, AH; Нисбет, EG; Миншалл, Т.А.; Лануазель, М.; Джеймс, Р.Х.; Хюнербах, В.; Грин, Д.; Фишер, RE; Крокер, Эй Джей; Шабер, А.; Болтон, К.; Бещинская-Мёллер, А.; Берндт, К.; Аквилина, А. (2009). «Выброс метана с морского дна вдоль континентальной окраины Западного Шпицбергена» (PDF) . Дж. Мар. Рес . 36 (15): L15608. Бибкод : 2009GeoRL..3615608W . дои : 10.1029/2009GL039191 .
- ^ Перейти обратно: а б с Лейтон, Т.Г.; Финфер, округ Колумбия; Уайт, PR; Чуа, Г. – Х.; Дикс, Дж. К. (2010). «Подавление и классификация помех с использованием двойного инвертированного импульсного гидролокатора (TWIPS)» (PDF) . Труды Королевского общества А. 466 (2124): 3453–3478. Бибкод : 2010RSPSA.466.3453L . дои : 10.1098/rspa.2010.0154 . S2CID 111066936 .
- ^ Лейтон, Т.Г.; Чуа, GH; Белый, PR (2012). «Получают ли дельфины пользу от нелинейной математики при обработке сигналов сонара?» (PDF) . Труды Королевского общества А. 468 (2147): 3517–3532. Бибкод : 2012RSPSA.468.3517L . дои : 10.1098/rspa.2012.0247 . S2CID 109255100 .
- ^ Лейтон, Т.Г.; Финфер, округ Колумбия; Чуа, GH; Уайт, PR; Дикс, Дж. К. (2011). «Подавление и классификация помех с использованием двойного инвертированного импульсного гидролокатора в следах корабля» (PDF) . Журнал Акустического общества Америки . 130 (5): 3431–7. Бибкод : 2011ASAJ..130.3431L . дои : 10.1121/1.3626131 . ПМИД 22088017 .
- ^ «Как советская «Акула» изменила подводную войну» . Фокстрот Альфа . 13 октября 2017 г. Проверено 15 января 2020 г.
- ^ Перейти обратно: а б Уитмен, Эдвард К. (зима 2005 г.). «СОСУС: «Секретное оружие» подводного наблюдения» . Подводная война . Том. 7, нет. 2. Архивировано из оригинала 24 марта 2020 года . Проверено 5 января 2020 г.
- ^ Перейти обратно: а б с «История Интегрированной системы подводного наблюдения (IUSS) 1950–2010 гг.» . Ассоциация выпускников IUSS/CAESAR . Проверено 22 мая 2020 г.
- ^ Мунк, Уолтер Х.; Шпиндел, Роберт С.; Баггерер, Артур; Бердсолл, Теодор Г. (20 мая 1994 г.). «Технико-экономическое обоснование острова Херд» (PDF) . Журнал Акустического общества Америки . 96 (4). Акустическое общество Америки: 2330–2342. Бибкод : 1994ASAJ...96.2330M . дои : 10.1121/1.410105 . Проверено 26 сентября 2020 г.
- ^ Либерман, Филип; Блюмштейн, Шейла Э. (4 февраля 1988 г.). Физиология речи, восприятие речи и акустическая фонетика . Кембридж, Кембриджшир, Великобритания/Нью-Йорк: Издательство Кембриджского университета. стр. 51–52. ISBN 0521308666 . LCCN 87013187 . Проверено 22 мая 2020 г.
- ^ «Истоки СОСУСа» . Командир подводного наблюдения. Архивировано из оригинала 7 августа 2020 года . Проверено 22 мая 2020 г.
- ^ Лент, К. (2002). «Сонар для дайверов со сверхвысоким разрешением» . Отчет в Управление военно-морских исследований . Архивировано из оригинала 8 октября 2008 г. Проверено 11 августа 2008 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Крюгер, Кеннет Л. (5 мая 2003 г.). «Дайверские карты и графическое отображение» . Техасский университет в лабораториях прикладных исследований Остина. Архивировано из оригинала 13 августа 2009 г. Проверено 21 января 2009 г.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «Исследователь океана NOAA: чтение эхолота» . Архивировано из оригинала 10 сентября 2015 г.
- ^ «Этот костюм дает вам настоящее паучье чутье» . Форбс . 23 февраля 2013 года. Архивировано из оригинала 27 февраля 2013 года . Проверено 12 марта 2013 г.
- ^ Перейти обратно: а б Рыболовство, НОАА (07 января 2021 г.). «Методы акустического исследования хека на западном побережье | Рыболовство NOAA» . НОАА . Проверено 29 июля 2023 г.
- ^ Стауглер, Бетти (15 октября 2019 г.). «Невесомость в воде» . Расширение UF/IFAS, округ Шарлотт . Проверено 29 июля 2023 г.
- ^ Пыдин, Анджей; Попек, Матеуш; Кубачка, Мария; Яновский, Лукаш (08 мая 2021 г.). «Исследование и реконструкция средневековой гавани с использованием гидроакустики, трехмерной мелкой сейсмики и подводной фотограмметрии: пример из Пуцка, южная часть Балтийского моря» . Археологическая разведка . 28 (4): 527–542. Бибкод : 2021ArchP..28..527P . дои : 10.1002/arp.1823 .
- ^ Перейти обратно: а б с д Лейтон, Т.Г.; Белый, PR (2012). «Количественная оценка подводных утечек газа из объектов улавливания и хранения углерода, из трубопроводов и из источников метана по их акустической эмиссии» (PDF) . Труды Королевского общества А. 468 (2138): 485–510. Бибкод : 2012RSPSA.468..485L . дои : 10.1098/rspa.2011.0221 . S2CID 108841954 .
- ^ Блэкфорд, Дж.; Шталь, Х.; Булл, Дж.; и др. (28 сентября 2014 г.). «Обнаружение и последствия утечек из подморских глубинных геологических хранилищ углекислого газа» (PDF) . Природа Изменение климата . 4 (11): Опубликовано в Интернете. Бибкод : 2014NatCC...4.1011B . дои : 10.1038/nclimate2381 . S2CID 54825193 .
- ^ Бержес, Б.Дж.П; Лейтон, Т.Г.; Белый, PR (2015). «Пассивное акустическое количественное определение газовых потоков в экспериментах по контролируемому выделению газа» . Международный журнал по контролю парниковых газов . 38 : 64–79. Бибкод : 2015IJGGC..38...64B . дои : 10.1016/j.ijggc.2015.02.008 .
- ^ Ханнис, С.; Чедвик, А.; Пирс, Дж.; и др. (2015). «Обзор морского мониторинга проектов CCS» (PDF) . Технический отчет IEAGHG 2015-02 (июль 2015 г.) : Авторские права принадлежат IEAGHG, 2016 г.
- ^ Ханнис, С.; Чедвик, А.; Коннелли, Д.; и др. (2017). «Обзор мониторинга морских хранилищ CO2: Опыт эксплуатации и исследований по соблюдению нормативных и технических требований» . Энергетическая процедура . 114 : 5967–5980. дои : 10.1016/j.egypro.2017.03.1732 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2011). «Обзор сечений рассеяния и затухания, коэффициентов затухания и резонансных частот сферического газового пузыря» (PDF) . Журнал Акустического общества Америки . 130 (5): 3184–3208. Бибкод : 2011ASAJ..130.3184A . дои : 10.1121/1.3628321 . ПМИД 22087992 .
- ^ Х.О. Берктай, Некоторые эффекты конечной амплитуды в подводной акустике в книге В.М. Альберса «Подводная акустика», 1967 г.
- ^ Вестервельт, П.Дж. (1963). Параметрическая акустическая решетка. Журнал Акустического общества Америки, 35 (4), 535–537.
- ^ Лейтон, Т.Г.; Петкулеску, А. (1 августа 2016 г.). «Акустические и связанные с ними волны во внеземной среде» (PDF) . Журнал Акустического общества Америки . 140 (2): 1397–1399. Бибкод : 2016ASAJ..140.1397L . дои : 10.1121/1.4961539 . ISSN 0001-4966 . ПМИД 27586765 .
- ^ Арвело и Лоренц (2013), J Acoust Soc Am
- ^ Лейтон, Т.Г.; Уайт, PR; Финфер, округ Колумбия (2005). «Шумы моря в космосе» (PDF) . Материалы Международной конференции по подводным акустическим измерениям, технологиям и результатам, Ираклион, Крит, 28 июня – 1 июля 2005 г. II : 833–840.
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2016). «Уравнения гидролокатора для исследования планет» (PDF) . Журнал Акустического общества Америки . 140 (2): 1400–1419. Бибкод : 2016ASAJ..140.1400A . дои : 10.1121/1.4960786 . ПМИД 27586766 .
- ^ Лейтон, Т.Г.; Финфер, округ Колумбия; Белый, PR (2008). «Проблемы акустики на маленькой планете» (PDF) . Икар . 193 (2): 649–652. Бибкод : 2008Icar..193..649L . дои : 10.1016/j.icarus.2007.10.008 .
- ^ Цзян, Дж; Байк, К; Лейтон, Т.Г. (2011). «Затухание звука, фазовая и групповая скорости в трубах, заполненных жидкостью II: моделирование источников расщепительных нейтронов и исследование планет» (PDF) . Журнал Акустического общества Америки . 130 (2): 695–706. Бибкод : 2011ASAJ..130..695J . дои : 10.1121/1.3598463 . ПМИД 21877784 .
- ^ Лейтон, Т.Г. (2009). «Эффекты нагрузки жидкостью для акустических датчиков в атмосферах Марса, Венеры, Титана и Юпитера» (PDF) . Журнал Акустического общества Америки . 125 (5): EL214–9. Бибкод : 2009ASAJ..125L.214L . дои : 10.1121/1.3104628 . ПМИД 19425625 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2009). «Поправки акустического поперечного сечения, близкие к резонансному пузырю, включая примеры из океанографии, вулканологии и биомедицинского ультразвука» (PDF) . Журнал Акустического общества Америки . 126 (5): 2163–75. Бибкод : 2009ASAJ..126.2163A . дои : 10.1121/1.3180130 . ПМИД 19894796 .
- ^ Лейтон, Т.Г.; Уайт, PR; Финфер, округ Колумбия (2012). «Возможности и проблемы использования внеземной акустики при исследовании океанов ледяных планетных тел» (PDF) . Земля, Луна и планеты . 109 (1–4): 99–116. Бибкод : 2012EM&P..109...91L . дои : 10.1007/s11038-012-9399-6 . S2CID 120569869 .
- ^ Перейти обратно: а б Дамиан Кэррингтон (3 июля 2013 г.). «Как показывают исследования, киты бегут от военного гидролокатора, что приводит к их массовому выбросу на берег» . Хранитель . Архивировано из оригинала 1 октября 2017 года.
- ^ Стейси Л. ДеРуитер; Брэндон Л. Саутхолл; Джон Каламбокидис; Уолтер М.Х. Циммер; Динара Садыкова; Эрин А. Фальконе; Ари С. Фридлендер; Джон Э. Джозеф; Дэвид Моретти; Грегори С. Шорр; Лен Томас; Питер Л. Тайак (2013). «Первые прямые измерения поведенческих реакций клюворылых китов Кювье на среднечастотный активный гидролокатор» . Письма по биологии . 9 (4): 20130223. doi : 10.1098/rsbl.2013.0223 . ПМЦ 3730631 . ПМИД 23825085 .
- ^ Гольдбоген Дж.А.; Саутхолл, БЛ; Деруитер С.Л.; Каламбокидис Дж.; Фридлендер АС; Хазен Э.Л.; Фальконе Э.А.; Шорр Г.С.; Дуглас А.; Моретти диджей; Кибург С.; Маккенна МФ; Тайак П.Л. (3 июля 2013 г.). «Синие киты реагируют на симуляцию военного гидролокатора средней частоты» . Труды Королевского общества Б. 280 (765): 20130657. doi : 10.1098/rspb.2013.0657 . ПМЦ 3712439 . ПМИД 23825206 .
- ^ Джепсон ПД; Девиль Р.; Асеведо-Уайтхаус К.; и др. (30 апреля 2013 г.). «Что стало причиной крупнейшего в Великобритании массового выбрасывания на берег обыкновенного дельфина (Delphinus delphis)?» . ПЛОС ОДИН . 8 (4): e60953. Бибкод : 2013PLoSO...860953J . дои : 10.1371/journal.pone.0060953 . ПМК 3640001 . ПМИД 23646103 .
- ^ Зима против Совета по защите национальных ресурсов. Архивировано 9 декабря 2017 г. в Wayback Machine № 07–1239, октябрь, 2008 г.
- ^ Гольдбоген Дж.А.; Саутхолл, БЛ; Деруитер С.Л.; Каламбокидис Дж.; Фридлендер АС; Хазен Э.Л.; Фальконе Э.А.; Шорр Г.С.; Дуглас А.; Моретти диджей; Кибург С.; Маккенна МФ; Тайак П.Л. (3 июля 2013 г.). «Синие киты реагируют на симуляцию военного гидролокатора средней частоты» . Труды Королевского общества Б. 280 (765): 20130657. doi : 10.1098/rspb.2013.0657 . ПМЦ 3712439 . ПМИД 23825206 .
- ^ Бернальдо де Кирос Ю; Фернандес А; Бэрд Р.В.; и др. (30 января 2019 г.). «Достижения в исследованиях воздействия противолодочных гидролокаторов на клюворылых китов» . Труды Королевского общества Б. 286 (1895): 20182533. doi : 10.1098/rspb.2018.2533 . ПМК 6364578 . ПМИД 30963955 .
- ^ Бэтчелор, Том (30 января 2019 г.). «Ученые требуют запрета военных гидролокаторов, чтобы положить конец массовому выбрасыванию китов на берег» . Независимый .
- ^ Поппер А.Н.; Халворсен М.Б.; Кейн А.; Миллер Д.Л.; Смит М.Э.; Сон Дж.; Высоцкий Л.Е. (2007). «Воздействие высокоинтенсивного низкочастотного активного гидролокатора на радужную форель». Журнал Акустического общества Америки . 122 (1): 623–635. Бибкод : 2007ASAJ..122..623P . дои : 10.1121/1.2735115 . ПМИД 17614519 .
- ^ Халворсен М.Б.; Зедди Д.Г.; Чикойн Д.; Поппер А.Н. (2013). «Влияние низкочастотного воздействия морского гидролокатора на три вида рыб» . Журнал Акустического общества Америки . 134 (2): EL205–EL210. Бибкод : 2013ASAJ..134L.205H . дои : 10.1121/1.4812818 . ПМИД 23927226 .
- ^ Сёрейде, Фредрик (28 апреля 2011 г.). Корабли из глубин . Издательство Техасского университета A&M. ISBN 9781603442183 . Архивировано из оригинала 26 апреля 2018 г.
Общая библиография
- Дринг, Томас Р. (март 2018 г.). «Крутая кривая обучения: влияние гидроакустических технологий, обучения и тактики на первые годы противолодочной войны ВМС США во Второй мировой войне». Военный корабль Интернешнл . Л.В. (январь 2018 г.): 37–57. ISSN 0043-0374 .
- Хакманн, Виллем. Seek & Strike: гидролокатор, противолодочная борьба и Королевский флот 1914–54 . Лондон: Канцелярия Ее Величества, 1984. ISBN 0-11-290423-8 .
- Хакманн, Виллем Д. «Голокационные исследования и военно-морская война 1914–1954: пример науки двадцатого века» (требуется подписка) . Исторические исследования в области физических и биологических наук 16 № 1 (январь 1986 г.) 83–110. дои : 10.2307/27757558 .
- Урик, Р.Дж. (1983). Принципы подводного звука (3-е издание). Лос-Альтос: Издательство полуострова. ISBN 9780932146625 . OCLC 1132503817 .
Справочные материалы по акустике рыболовства
- Исследования акустики рыболовства (FAR) в Вашингтонском университете
- Протоколы NOAA для акустических исследований рыболовства
- Акустика в распакованном виде. Архивировано 16 сентября 2017 г. на Wayback Machine. Отличный справочник по пресноводной гидроакустике для оценки ресурсов.
- «АКУСТИКА В РЫБОЛОВСТВЕ И ВОДНОЙ ЭКОЛОГИИ»
- «Гидроакустический протокол – озера, водохранилища и равнинные реки» (для оценки рыбы)
- Симмондс, Э. Джон и Д.Н. МакЛеннан. Акустика рыболовства: теория и практика , второе издание. Серия «Рыба и водные ресурсы», 10. Оксфорд: Blackwell Science, 2003. ISBN 978-0-632-05994-2 .
Дальнейшее чтение
- «Канада: стабильный звук» , Time , 28 октября 1946 года. Интересный отчет о 4800 гидролокаторах ASDIC, тайно изготовленных в Каса Лома , Торонто , во время Второй мировой войны. Проверено 25 сентября 2009 г.
- «Радар глубин — SONAR» , Popular Science , ноябрь 1945 г., стр. 84–87, 246, 250: одна из лучших общедоступных статей по этой теме.
Внешние ссылки
- Факты FFI: гидролокаторы и морская среда Норвежского института оборонных исследований (FFI)
- Дистанционное зондирование для управления прибрежными районами: однолучевой гидролокатор — Центр прибрежных служб, Национальное управление океанических и атмосферных исследований.
