Сонар


Сонар ( звуковая навигация и дальность или звуковая навигация и дальность ) [2] Это метод, который использует распространение звука (обычно под водой, как в подводной навигации ) для навигации , измерения расстояний ( дальномерности ), связи или обнаружения объектов на поверхности воды или под ней, например, других судов. [3]
«Сонар» может относиться к одному из двух типов технологий: пассивный гидролокатор означает прислушивание к звуку, издаваемому судами; активный гидролокатор означает излучение звуковых импульсов и прислушивание к эху. Гидролокатор может использоваться как средство акустической локации и измерения эхо-характеристик «целей» в воде. [4] Акустическая локация в воздухе использовалась до появления радиолокации . Сонар также может использоваться для навигации роботов. [5] а содар (гидролокатор, направленный вверх) используется для исследований атмосферы. Термин «сонар» также используется для обозначения оборудования, используемого для генерации и приема звука. Акустические частоты, используемые в гидроакустических системах, варьируются от очень низких ( инфразвуковых ) до чрезвычайно высоких ( ультразвуковых ). Изучение подводного звука известно как подводная акустика или гидроакустика .
Первое зарегистрированное использование этой техники было в 1490 году Леонардо да Винчи , который использовал трубку, вставленную в воду, для обнаружения сосудов на слух. [6] Он был разработан во время Первой мировой войны для противодействия растущей угрозе подводной войны действующая пассивная гидролокационная система. , а к 1918 году использовалась [3] Современные активные гидроакустические системы используют акустический преобразователь для генерации звуковой волны, которая отражается от целевых объектов. [3]
История
Хотя некоторые животные ( дельфины , летучие мыши , некоторые землероек и другие) использовали звук для общения и обнаружения объектов на протяжении миллионов лет, использование человеком в воде впервые было зафиксировано Леонардо да Винчи в 1490 году: в воду вставлялась трубка. Говорят, что его используют для обнаружения сосудов путем поднесения уха к трубке. [6]
В конце 19 века подводный колокол использовался в качестве вспомогательного устройства маяков или плавучих маяков для предупреждения об опасностях. [7]
Использование звука для «эхолокации» под водой так же, как летучие мыши используют звук для воздушной навигации, похоже, было вызвано катастрофой Титаника в 1912 году. [8] Первый в мире патент на подводное эхолотное устройство был подан в Британское патентное ведомство английским метеорологом Льюисом Фраем Ричардсоном через месяц после затопления Титаника . [9] а немецкий физик Александр Бем получил патент на эхолот в 1913 году. [10]
Канадский инженер Реджинальд Фессенден , работая в компании Submarine Signal Company в Бостоне , штат Массачусетс, построил экспериментальную систему, начиная с 1912 года, систему, позже испытанную в Бостонской гавани и, наконец, в 1914 году на американском судне Revenue Cutter Miami на Гранд-Бэнкс у Ньюфаундленда. . [9] [11] В этом тесте Фессенден продемонстрировал глубинное зондирование, подводную связь ( код Морзе ) и определение эхолокации (обнаружение айсберга на расстоянии 2 миль (3,2 км)). [12] [13] « Генератор Фессендена », работавший на частоте около 500 Гц, не смог определить направление айсберга из-за 3-метровой длины волны и малого размера излучающей грани преобразователя (менее 1/3 длины волны в диаметре). Десять в Монреале построенных британских подводных лодок класса H, , спущенных на воду в 1915 году, были оснащены генераторами Фессендена. [14]
Во время Первой мировой войны необходимость обнаружения подводных лодок побудила к дополнительным исследованиям в области использования звука. Британцы первыми начали использовать подводные прослушивающие устройства, называемые гидрофонами , а французский физик Поль Ланжевен , работая с русским иммигрантом, инженером-электриком Константином Чиловским, работал над разработкой активных звуковых устройств для обнаружения подводных лодок в 1915 году. Хотя позже на смену пришли пьезоэлектрические и магнитострикционные преобразователи. электростатические преобразователи , которые они использовали, эта работа повлияла на будущие разработки. Для гидрофонов использованы легкая звукочувствительная пластиковая пленка и оптоволокно, а терфенол-Д и ниобат свинца-магния для проекторов разработаны (ПМН).
АСДИК

В 1916 году под руководством Британского совета по изобретениям и исследованиям канадский физик Роберт Уильям Бойл взялся за проект активного обнаружения звука вместе с AB Wood , создав прототип для испытаний в середине 1917 года. Эта работа для противолодочного дивизиона британского военно-морского штаба проводилась в условиях строжайшей секретности, и в ней использовались пьезоэлектрические кристаллы кварца для создания первого в мире практического подводного активного устройства обнаружения звука. Чтобы сохранить секретность, не упоминалось ни об экспериментах со звуком, ни о кварце — слово, используемое для описания ранних работ («сверхзвуковая техника»), было изменено на «ASD»ics, а кварцевый материал — на «ASD»ivite: «ASD» означает «ASD». Противолодочная дивизия», отсюда и британская аббревиатура ASDIC . В 1939 году, в ответ на вопрос из Оксфордского словаря английского языка , Адмиралтейство выдумало версию, что оно расшифровывается как «Комитет по расследованию обнаружения подводных лодок союзников», и это до сих пор широко распространено. [15] хотя ни одного комитета с таким названием в архивах Адмиралтейства не обнаружено. [16]
К 1918 году Великобритания и Франция создали прототипы активных систем. Британцы испытали свой ASDIC на HMS Antrim были созданы противолодочная школа HMS Osprey и учебная флотилия из четырех кораблей в 1920 году и начали производство в 1922 году. В 1923 году 6-я флотилия эсминцев имела суда, оборудованные ASDIC. В 1924 году в Портленде .
К началу Второй мировой войны Королевский флот имел пять комплектов для разных классов надводных кораблей и другие для подводных лодок, включенных в полную противолодочную систему. Эффективность ранних ASDIC снижалась из-за использования глубинной бомбы в качестве противолодочного оружия. Это требовало, чтобы атакующее судно прошло над подводным контактом, прежде чем сбросить заряды на корму, что приводило к потере контакта ASDIC в моменты, предшествующие атаке. Охотник фактически вел огонь вслепую, в это время командир подводной лодки мог предпринять действия по уклонению. Эту ситуацию удалось исправить с помощью новой тактики и нового оружия.
Тактические усовершенствования, разработанные Фредериком Джоном Уокером, включали ползучую атаку. Для этого требовалось два противолодочных корабля (обычно шлюпы или корветы). «Направляющий корабль» отслеживал подводную лодку-мишень с помощью ASDIC с позиции примерно в 1500–2000 ярдов позади подводной лодки. Второй корабль с выключенным ASDIC и идущим на скорости 5 узлов начал атаку с позиции между направляющим кораблем и целью. Эта атака контролировалась по радиотелефону с корабля-наводчика, исходя из их ASDIC и дальности (по дальномеру) и пеленга атакующего корабля. Как только глубинные бомбы были выпущены, атакующий корабль на полной скорости покинул район. Затем корабль-наводчик вошел в район цели и также выпустил серию глубинных бомб. Низкая скорость подхода означала, что подводная лодка не могла предсказать, когда будут выпущены глубинные бомбы. Любые действия по уклонению были обнаружены направляющим кораблем и отданы соответствующие приказы атакующему кораблю. Низкая скорость атаки имела то преимущество, что Немецкая акустическая торпеда была неэффективна против медленно движущегося военного корабля. Разновидностью ползучей атаки была «гипсовая» атака, при которой три атакующих корабля, работающих в тесной линии в ряд, направлялись над целью направляющим кораблем. [17]
Новым оружием для борьбы со слепым пятном ASDIC было «оружие, бросающее вперед», такое как Hedgehogs и более поздние Squids , которое проецировало боеголовки в цель впереди атакующего, все еще находящуюся в контакте с ASDIC. Это позволило одному эскорту лучше наносить удары по подводным лодкам. Развитие во время войны привело к появлению британских наборов ASDIC, в которых использовалось несколько различных форм луча, постоянно закрывающих слепые зоны. Позже акустические торпеды были использованы .
В начале Второй мировой войны (сентябрь 1940 г.) британская технология ASDIC была бесплатно передана Соединенным Штатам. Исследования ASDIC и подводного звука были расширены в Великобритании и США. Было разработано множество новых типов военного обнаружения звука. К ним относятся гидроакустические буи , впервые разработанные британцами в 1944 году под кодовым названием High Tea , гидролокатор погружения/погружения и гидролокатор обнаружения мин . Эта работа легла в основу послевоенных разработок, связанных с противодействием атомной подводной лодке .
СОНАР
В 1930-е годы американские инженеры разработали собственную технологию обнаружения подводного звука и были сделаны важные открытия, такие как существование термоклинов и их влияние на звуковые волны. [18] Американцы начали использовать для своих систем термин SONAR , придуманный Фредериком Хантом как эквивалент RADAR . [19]
Лаборатория подводного звука ВМС США
В 1917 году ВМС США Дж. Уоррена Хортона впервые воспользовались услугами . В отпуске из Bell Labs он служил правительству в качестве технического эксперта сначала на экспериментальной станции в Наханте, штат Массачусетс , а затем в штаб-квартире ВМС США в Лондоне , Англия. В Нахане он применил недавно разработанную вакуумную лампу , которая тогда была связана с этапами становления области прикладной науки, ныне известной как электроника , для обнаружения подводных сигналов. В результате угольный кнопочный микрофон , который использовался в более раннем оборудовании для обнаружения, был заменен предшественником современного гидрофона . Также в этот период он экспериментировал с методами обнаружения буксировки. Это произошло из-за повышенной чувствительности его устройства. Эти принципы до сих пор используются в современных буксируемых гидроакустических системах.
Для обеспечения оборонных нужд Великобритании его отправили в Англию для установки в Ирландском море донных гидрофонов, соединенных подводным кабелем с береговым постом прослушивания. Пока это оборудование загружалось на судно-кабелеукладчик, закончилась Первая мировая война и Хортон вернулся домой.
Во время Второй мировой войны он продолжал разрабатывать гидроакустические системы, которые могли обнаруживать подводные лодки, мины и торпеды. Он опубликовал «Основы гидролокации» в 1957 году в качестве главного консультанта по исследованиям в Лаборатории подводного звука ВМС США . Он занимал эту должность до 1959 года, когда стал техническим директором, и занимал эту должность до обязательного выхода на пенсию в 1963 году. [20] [21]
Материалы и дизайн в США и Японии.
В период с 1915 по 1940 год прогресс в гидролокаторах США был незначительным. В 1940 году гидролокаторы США обычно состояли из магнитострикционного преобразователя и набора никелевых трубок, соединенных со стальной пластиной диаметром 1 фут, прикрепленной спиной к сешельской соли кристаллу . в сферическом корпусе. Этот узел проникал в корпус корабля и вручную поворачивался на нужный угол. Пьезоэлектрический кристалл сешельской соли имел лучшие параметры, но магнитострикционный блок был гораздо надежнее. Высокие потери торгового судоходства США в начале Второй мировой войны привели к широкомасштабным высокоприоритетным исследованиям в этой области в США, направленным как на улучшение параметров магнитострикционных преобразователей, так и на надежность селековой соли. Дигидрофосфат аммония (АДФ), превосходная альтернатива, был найден в качестве замены сегнетовой соли; Первым применением была замена датчиков сегнетовой соли 24 кГц. В течение девяти месяцев соль Рошель устарела. Производственные мощности ADP выросли с нескольких десятков человек в начале 1940 года до нескольких тысяч в 1942 году.
Одним из первых применений кристаллов ADP были гидрофоны для акустических шахт ; Кристаллы были рассчитаны на низкую частоту среза 5 Гц, выдерживали механические удары при развертывании с самолетов с высоты 3000 м (10 000 футов) и способность выдерживать взрывы соседних мин. Одной из ключевых особенностей надежности ADP является отсутствие старения; кристалл сохраняет свои параметры даже при длительном хранении.
Еще одним применением были торпеды с акустическим самонаведением. На носовой части торпеды устанавливались две пары гидрофонов направленного действия, в горизонтальной и вертикальной плоскости; разностные сигналы от пар использовались для управления торпедой влево-вправо и вверх-вниз. Была разработана мера противодействия: выбранная подводная лодка выпустила шипучий химикат, и торпеда пошла за более шумной шипучей приманкой. Средством противодействия стала торпеда с активным гидролокатором — в носовую часть торпеды был добавлен преобразователь, и микрофоны прослушивали отраженные от нее периодические тональные сигналы. Преобразователи представляли собой одинаковые прямоугольные кристаллические пластины, расположенные на ромбовидных участках в шахматном порядке.
Пассивные гидролокаторы для подводных лодок были разработаны на основе кристаллов ADP. Несколько кристаллических сборок были помещены в стальную трубку, заполненную касторовым маслом под вакуумом и запечатанную. Затем трубки были установлены в параллельные ряды.
Стандартный сканирующий гидролокатор ВМС США в конце Второй мировой войны работал на частоте 18 кГц и использовал массив кристаллов ADP. Однако желательная дальность действия требовала использования более низких частот. Требуемые размеры были слишком большими для кристаллов ADP, поэтому в начале 1950-х годов были разработаны магнитострикционные пьезоэлектрические системы и пьезоэлектрические системы из титаната бария , но у них были проблемы с достижением однородных характеристик импеданса, и ухудшилась диаграмма направленности луча. Затем титанат бария заменили на более стабильный цирконат-титанат свинца (ЦТС), а частоту снизили до 5 кГц. Флот США использовал этот материал в гидролокаторе AN/SQS-23 в течение нескольких десятилетий. В гидролокаторе SQS-23 сначала использовались магнитострикционные никелевые преобразователи, но они весили несколько тонн, а никель был дорогим и считался критически важным материалом; Поэтому были заменены пьезоэлектрические преобразователи. Гидролокатор представлял собой большой массив из 432 отдельных преобразователей. Поначалу датчики были ненадежными, имели механические и электрические неисправности и выходили из строя вскоре после установки; они также производились несколькими поставщиками, имели разную конструкцию и настолько различались характеристики, что ухудшали производительность массива. Затем была принесена в жертву политика, разрешающая ремонт отдельных датчиков, и вместо этого была выбрана «одноразовая модульная конструкция», герметичные неремонтопригодные модули, что устраняло проблему с уплотнениями и другими посторонними механическими деталями. [22]
Императорский флот Японии в начале Второй мировой войны использовал проекторы на основе кварца . Они были большими и тяжелыми, особенно если были рассчитаны на более низкие частоты; один для установки Тип 91, работавший на частоте 9 кГц, имел диаметр 30 дюймов (760 мм) и приводился в движение генератором мощностью 5 кВт и выходной амплитудой 7 кВ. Проекторы Тип 93 состояли из цельных сэндвичей из кварца, собранных в сферические чугунные корпуса. Позже гидролокаторы Тип 93 были заменены гидролокаторами Типа 3, которые следовали немецкой конструкции и использовали магнитострикционные проекторы; проекторы состояли из двух прямоугольных одинаковых независимых блоков в чугунном прямоугольном корпусе размером примерно 16 на 9 дюймов (410 мм × 230 мм). Экспонированная область имела ширину в половину длины волны и высоту в три длины волны. Магнитострикционные сердечники изготавливались из штамповок толщиной 4 мм из никеля, а затем из железо-алюминиевого сплава с содержанием алюминия от 12,7% до 12,9%. Питание осуществлялось от сети мощностью 2 кВт при напряжении 3,8 кВ, с поляризацией от источника постоянного тока 20 В, 8 А.
Пассивные гидрофоны Императорского флота Японии были основаны на конструкции с подвижной катушкой, пьезопреобразователях из соли Рошель и угольных микрофонах . [23]
Более поздние разработки преобразователей
Магнитострикционные преобразователи стали использоваться после Второй мировой войны как альтернатива пьезоэлектрическим. Никелевые преобразователи со спиральной обмоткой использовались для мощных низкочастотных операций и имели размер до 13 футов (4,0 м) в диаметре, что, вероятно, было самым большим индивидуальным гидролокационным преобразователем за всю историю. Преимуществом металлов является их высокая прочность на разрыв и низкое входное электрическое сопротивление, однако они имеют электрические потери и более низкий коэффициент связи, чем ЦТС, прочность на разрыв которого можно повысить путем предварительного напряжения . Были опробованы и другие материалы; неметаллические ферриты были многообещающими из-за своей низкой электропроводности, приводящей к низким на вихревые токи потерям , Metglas предлагал высокий коэффициент связи, но в целом они уступали ЦТС. В 1970-е годы были открыты соединения редких земель и железа с превосходными магнитомеханическими свойствами, а именно сплав Терфенол-Д . Это сделало возможным создание новых конструкций, например, гибридного магнитострикционно-пьезоэлектрического преобразователя. Самым последним из этих улучшенных магнитострикционных материалов является Галфенол .
Другие типы преобразователей включают преобразователи с переменным сопротивлением (или с подвижным якорем, или электромагнитные), в которых магнитная сила действует на поверхности зазоров, и преобразователи с подвижной катушкой (или электродинамические), аналогичные обычным динамикам; последние используются при калибровке подводного звука из-за их очень низких резонансных частот и плоских широкополосных характеристик выше них. [24]
Активный сонар

Активный эхолот использует передатчик звука (или проектор) и приемник. Когда оба находятся в одном месте, это моностатическая работа . Когда передатчик и приемник разделены, это бистатический режим работы . [25] Когда используется больше передатчиков (или больше приемников), опять же пространственно разделенных, это мультистатическая работа . Большинство гидролокаторов используются моностатически, причем для передачи и приема часто используется одна и та же решетка. [26] Активные поля гидроакустических буев могут работать в мультистатическом режиме.
Активный сонар создает звуковой импульс , часто называемый «пингом», а затем отслеживает отражения ( эхо ) импульса. Этот звуковой импульс обычно создается электронным способом с помощью гидролокатора, состоящего из генератора сигналов, усилителя мощности и электроакустического преобразователя/матрицы. [27] Преобразователь — это устройство, которое может передавать и принимать акустические сигналы («пинги»). Формирователь луча обычно используется для концентрации акустической мощности в луче, который можно разворачивать для покрытия требуемых углов поиска. Обычно электроакустические преобразователи относятся к типу Tonpilz , и их конструкция может быть оптимизирована для достижения максимальной эффективности в самой широкой полосе пропускания, чтобы оптимизировать производительность всей системы. Иногда акустический импульс может быть создан другими способами, например, химическим путем с использованием взрывчатых веществ, пневматических пушек или плазменных источников звука.
Для измерения расстояния до объекта измеряется время от передачи импульса до его приема и преобразуется в дальность с использованием известной скорости звука. [28] Для измерения пеленга используются несколько гидрофонов , и этот набор измеряет относительное время прибытия на каждый из них или с помощью группы гидрофонов путем измерения относительной амплитуды лучей, сформированных посредством процесса, называемого формированием луча . Использование решетки уменьшает пространственный отклик, поэтому для обеспечения широкого покрытия многолучевые используются системы. Целевой сигнал (если он присутствует) вместе с шумом затем пропускается через различные формы обработки сигнала . [29] что для простых гидролокаторов может быть просто измерением энергии. Затем он передается некоторому устройству принятия решения, которое вызывает на выходе либо требуемый сигнал, либо шум. Этим устройством принятия решения может быть оператор с наушниками или дисплеем, либо в более сложных гидролокаторах эта функция может выполняться программным обеспечением. Могут быть проведены дальнейшие процессы для классификации цели и ее локализации, а также измерения ее скорости.
Импульс может иметь постоянную частоту или иметь изменяющуюся частоту (чтобы обеспечить сжатие импульса при приеме). В простых гидролокаторах обычно используется первый с достаточно широким фильтром, чтобы покрыть возможные доплеровские изменения из-за движения цели, тогда как в более сложных обычно используется второй метод. С тех пор, как стала доступна цифровая обработка, сжатие импульсов обычно реализуется с использованием методов цифровой корреляции. Военные гидролокаторы часто имеют несколько лучей для обеспечения всестороннего охвата, в то время как простые покрывают только узкую дугу, хотя луч можно относительно медленно вращать за счет механического сканирования.
В частности, когда используются одночастотные передачи, эффект Доплера можно использовать для измерения радиальной скорости цели. Разница в частоте между передаваемым и полученным сигналом измеряется и преобразуется в скорость. Поскольку доплеровские сдвиги могут быть вызваны движением приемника или цели, необходимо учитывать радиальную скорость поисковой платформы.
Один полезный небольшой гидролокатор внешне похож на водонепроницаемый фонарик. Голову наводят в воду, нажимают кнопку, и прибор отображает расстояние до цели. Другой вариант — « рыбопоисковый эхолот », на котором отображается небольшой дисплей с косяками рыбы. Некоторые гражданские гидролокаторы (которые не предназначены для скрытности) по своим возможностям приближаются к активным военным гидролокаторам, обеспечивая трехмерное отображение местности возле лодки.
Когда для измерения расстояния от преобразователя до дна используется активный гидролокатор, это называется эхолотированием . Аналогичные методы можно использовать для измерения волн, глядя вверх.
Активный гидролокатор также используется для измерения расстояния в воде между двумя преобразователями гидролокатора или комбинацией гидрофона (подводный акустический микрофон) и проектора (подводный акустический динамик). Когда гидрофон/преобразователь получает определенный сигнал запроса, он отвечает, передавая определенный ответный сигнал. Для измерения расстояния один датчик/проектор передает запросный сигнал и измеряет время между этой передачей и получением ответа от другого датчика/гидрофона. Разница во времени, масштабированная по скорости звука в воде и деленная на два, представляет собой расстояние между двумя платформами. Этот метод при использовании с несколькими преобразователями/гидрофонами/проекторами позволяет рассчитывать относительные положения статических и движущихся объектов в воде.
В боевых ситуациях активный импульс может быть обнаружен противником и выявит положение подводной лодки на расстоянии, вдвое превышающем максимальное расстояние, на котором подводная лодка сама может обнаружить контакт, и даст подсказки об идентификации подводной лодки на основе характеристик исходящего сигнала. По этим причинам активные гидролокаторы не часто используются военными подводными лодками.
Очень направленный, но малоэффективный тип гидролокатора (используемый рыболовством, военными и для обеспечения безопасности портов) использует сложную нелинейную характеристику воды, известную как нелинейный гидролокатор, причем виртуальный преобразователь известен как параметрический массив .
Проект Артемида
Проект «Артемида» представлял собой экспериментальный проект исследований и разработок, проводившийся в конце 1950-х - середине 1960-х годов по изучению распространения акустических сигналов и обработки сигналов для низкочастотной активной гидролокационной системы, которая могла бы использоваться для наблюдения за океаном. Второстепенной задачей было изучение инженерных проблем стационарных систем активного дна. [30] Приемная группа располагалась на склоне банки Плантангнет у Бермудских островов. Группа активных источников была развернута с переоборудованного танкера времен Второй мировой войны USNS Mission Capistrano . [31] Элементы Артемиды использовались экспериментально после завершения основного эксперимента.
Транспондер
Это активное гидролокационное устройство, которое принимает определенный стимул и немедленно (или с задержкой) повторно передает полученный сигнал или заданный. Транспондеры можно использовать для удаленной активации или восстановления подводного оборудования. [32]
Прогноз производительности
Цель гидролокатора мала по сравнению с сферой , сосредоточенной вокруг излучателя, на котором она расположена. Поэтому мощность отраженного сигнала очень мала, на несколько порядков меньше исходного сигнала. Даже если бы отраженный сигнал имел ту же мощность, следующий пример (с использованием гипотетических значений) показывает проблему: Предположим, гидролокационная система способна излучать мощность 10 000 Вт/м. 2 сигнал на расстоянии 1 м и обнаружение 0,001 Вт/м 2 сигнал. На 100 м сигнал будет 1 Вт/м. 2 (по закону обратных квадратов ). Если весь сигнал отражается от 10-метрового 2 цель, она будет на уровне 0,001 Вт/м. 2 когда он достигает излучателя, т.е. его можно только обнаружить. Однако исходный сигнал останется выше 0,001 Вт/м. 2 до 3000 м. Любые 10 м 2 цель на расстоянии от 100 до 3000 м с использованием аналогичной или лучшей системы сможет обнаружить импульс, но не будет обнаружена излучателем. Детекторы должны быть очень чувствительными, чтобы улавливать эхо. Поскольку исходный сигнал намного мощнее, его можно обнаружить во много раз дальше, чем в два раза больше дальности действия сонара (как в примере).
Активный эхолот имеет два ограничения производительности: из-за шума и реверберации. В общем, тот или иной из них будет доминировать, так что эти два эффекта можно первоначально рассматривать отдельно.
В условиях ограниченного шума при первоначальном обнаружении: [33]
- СЛ − 2ПЛ + ТС − (НЛ − АГ) = ДТ,
где SL — уровень источника , PL — потери при распространении (иногда называемые потерями при передаче ), TS — мощность цели , NL — уровень шума , AG — коэффициент усиления приемной решетки (иногда аппроксимируемый ее индексом направленности) DT – порог обнаружения .
В условиях ограниченной реверберации при первоначальном обнаружении (без учета усиления массива):
- СЛ − 2ПЛ + ТС = РЛ + ДТ,
где RL — уровень реверберации , остальные факторы такие же, как и раньше.
Ручной гидролокатор для дайвера.
- LIMIS (гидролокатор для отображения минных знаков) представляет собой ручной или устанавливаемый на ROV гидролокатор для получения изображения, предназначенный для использования дайвером. Его название связано с тем, что он был разработан для патрульных водолазов (боевых водолазов или водолазов-разведчиков ) для поиска мин в условиях плохой видимости .
- LUIS (линзовая система подводной визуализации) — это еще один гидролокатор визуализации, используемый дайвером.
- Для дайверов существует или существовал небольшой портативный гидролокатор в форме фонарика, который просто отображает дальность.
- Для INSS (интегрированная навигационная гидролокационная система)
Сонар, смотрящий вверх
Гидролокатор восходящего обзора (ULS) — это гидролокатор, направленный вверх и смотрящий на поверхность моря. Он используется для тех же целей, что и гидролокатор нисходящего обзора, но имеет некоторые уникальные применения, такие как измерение толщины, шероховатости и концентрации морского льда , [34] [35] или измерение уноса воздуха из пузырьковых шлейфов во время волнения на море. Часто он пришвартован на дне океана или плавает на натянутом тросе, пришвартованном на постоянной глубине около 100 м. Они также могут использоваться подводными лодками , АНПА и поплавками, такими как поплавок «Арго» . [36]
Пассивный эхолот
Этот раздел включает список общих ссылок , но в нем отсутствуют достаточные соответствующие встроенные цитаты . ( Октябрь 2023 г. ) |
Пассивный сонар слушает без передачи. [37] Его часто используют в военных целях, хотя он также используется в научных приложениях, например , для обнаружения рыбы для изучения присутствия/отсутствия в различных водных средах – см. также пассивную акустику и пассивный радар . В самом широком смысле этот термин может охватывать практически любой аналитический метод, включающий дистанционно генерируемый звук, хотя обычно он ограничивается методами, применяемыми в водной среде.
Определение источников звука
Пассивный гидролокатор имеет широкий спектр методов определения источника обнаруженного звука. Например, суда США обычно используют 60 Герц (Гц) системы питания переменного тока частотой . Если трансформаторы или генераторы установлены без надлежащей виброизоляции корпуса или затоплены, звук частотой 60 Гц от обмоток может исходить из подводной лодки или корабля. Это может помочь определить ее национальность, поскольку все европейские подводные лодки и подводные лодки почти всех других стран имеют энергосистемы с частотой 50 Гц. Прерывистые источники звука (например, падение гаечного ключа ), называемые «переходными процессами», также могут быть обнаружены пассивным гидролокатором. До сравнительно недавнего времени [ когда? ] опытный, обученный оператор идентифицировал сигналы, но теперь это могут делать компьютеры.
Пассивные гидролокационные системы могут иметь большие звуковые базы данных , но оператор гидролокатора обычно окончательно классифицирует сигналы вручную. Компьютерная система часто использует эти базы данных для определения классов кораблей, действий (т. е. скорости корабля или типа выпущенного оружия и наиболее эффективных мер противодействия) и даже конкретных кораблей.
Ограничения по шуму
Пассивный гидролокатор на транспортных средствах обычно сильно ограничен из-за шума, создаваемого транспортным средством. По этой причине на многих подводных лодках используются ядерные реакторы , которые можно охлаждать без насосов, используя бесшумную конвекцию , или топливные элементы или батареи , которые также могут работать бесшумно. транспортных средств Пропеллеры также спроектированы и точно обработаны так, чтобы издавать минимальный шум. Высокоскоростные винты часто создают в воде крошечные пузырьки, и эта кавитация имеет отчетливый звук.
Гидроакустические гидрофоны могут буксироваться за кораблем или подводной лодкой, чтобы уменьшить влияние шума, создаваемого самим плавсредством. Буксируемые агрегаты также борются с термоклином , поскольку агрегат можно буксировать выше или ниже термоклина.
Дисплей большинства пассивных гидролокаторов раньше представлял собой двухмерный водопадный дисплей . Горизонтальное направление дисплея является пеленгом. Вертикаль — это частота, а иногда и время. Другой метод отображения заключается в цветовом кодировании информации о частоте и времени для пеленга. Более поздние дисплеи генерируются компьютерами и имитируют радиолокационного типа дисплеи индикаторов положения на плане .
Прогноз производительности
В отличие от активного сонара, используется только одностороннее распространение. Из-за различной обработки сигналов минимальное обнаруживаемое соотношение сигнал/шум будет другим. Уравнение для определения характеристик пассивного гидролокатора: [38] [33]
- СЛ − ПЛ = НЛ − АГ + ДТ,
где SL — уровень источника, PL — потери при распространении, NL — уровень шума, AG — коэффициент усиления массива, а DT — порог обнаружения. Показатель качества пассивного гидролокатора составляет
- ФОМ = СЛ + АГ − (НЛ + ДТ).
Факторы производительности
Характеристики обнаружения, классификации и локализации гидролокатора зависят от окружающей среды и приемного оборудования, а также передающего оборудования в активном гидролокаторе или шума, излучаемого целью в пассивном гидролокаторе.
Распространение звука
На работу сонара влияют изменения скорости звука , особенно в вертикальной плоскости. звук распространяется медленнее, В пресной воде чем в морской , хотя разница невелика. воды Скорость определяется модулем объемного сжатия и массовой плотностью . На модуль объемного сжатия влияют температура, растворенные примеси (обычно соленость ) и давление . Эффект плотности невелик. Скорость звука (в футах в секунду) составляет примерно:
- 4388 + (11,25 × температура (в °F)) + (0,0182 × глубина (в футах)) + соленость (в частях на тысячу).
Это приближенное уравнение, полученное эмпирическим путем , достаточно точно для нормальных температур, концентраций солености и диапазона большинства глубин океана. Температура океана варьируется в зависимости от глубины, но на глубине от 30 до 100 метров часто наблюдается заметное изменение, называемое термоклином , отделяющее более теплые поверхностные воды от холодных, стоячих вод, составляющих остальную часть океана. Это может помешать работе сонара, поскольку звук, исходящий с одной стороны термоклина, имеет тенденцию преломляться через термоклин. Термоклин может присутствовать в более мелких прибрежных водах. Однако воздействие волн часто перемешивает толщу воды и устраняет термоклин. воды Давление также влияет на распространение звука: более высокое давление увеличивает скорость звука, что заставляет звуковые волны преломляться от области с более высокой скоростью звука. Математическая модель преломления называется законом Снеллиуса .
Если источник звука находится глубоко и созданы подходящие условия, распространение звука может происходить в « глубоком звуковом канале ». Это обеспечивает чрезвычайно низкие потери при распространении для приемника в канале. Это связано с захватом звука в канале без потерь на границах. Подобное распространение может происходить в «поверхностном канале» при подходящих условиях. Однако в этом случае возникают потери на отражение на поверхности.
На мелководье распространение обычно происходит за счет многократного отражения от поверхности и дна, где могут возникнуть значительные потери.
На распространение звука влияет поглощение в самой воде, а также на поверхности и дне. Это поглощение зависит от частоты и в морской воде имеет несколько различных механизмов. Сонар дальнего действия использует низкие частоты, чтобы минимизировать эффекты поглощения.
Море содержит множество источников шума, которые мешают желаемому эхо-сигналу или сигнатуре цели. Основными источниками шума являются волны и судоходство . Движение приемника по воде также может вызвать низкочастотный шум, зависящий от скорости.
Рассеяние
При использовании активного гидролокатора рассеяние происходит от мелких объектов в море, а также со дна и поверхности. Это может быть основным источником помех. Это акустическое рассеяние аналогично рассеянию света фар автомобиля в тумане: высокоинтенсивный карандашный луч в некоторой степени проникает в туман, но фары с более широким светом излучают много света в нежелательных направлениях, большая часть которого рассеивается назад. наблюдателю, подавляя отражение от цели («белое небо»). По аналогичным причинам активный гидролокатор должен передавать узкий луч, чтобы минимизировать рассеяние.

Рассеяние сонара от объектов (шахты, трубопроводы, зоопланктон, геологические объекты, рыба и т. д.) — это то, как активный гидролокатор обнаруживает их, но эта способность может быть замаскирована сильным рассеянием от ложных целей или «помех». Где они возникают (при прибое волн; [40] в следах корабля; в газе, выбрасываемом из донных просачиваний и утечек [41] и т. д.), газовые пузыри являются мощным источником помех и могут легко скрыть цели. TWIPS (двойной инвертированный импульсный сонар) [42] [43] [44] в настоящее время является единственным гидролокатором, который может решить эту проблему помех.

Это важно, поскольку многие недавние конфликты произошли в прибрежных водах, а неспособность определить наличие или отсутствие мин представляет опасность и задержки для военных судов, а также для оказания помощи конвоям и торговым судам, пытающимся поддержать регион еще долгое время после того, как конфликт закончился. прекратился. [42]
Целевые характеристики
звука Характеристики отражения от цели активного гидролокатора, например подводной лодки, известны как сила цели . Сложность заключается в том, что эхо-сигналы также принимаются от других объектов в море, таких как киты, следы, косяки рыб и камни.
шума цели Пассивный гидролокатор определяет характеристики излучаемого . Излучаемый спектр представляет собой непрерывный спектр шума с пиками на определенных частотах, которые можно использовать для классификации.
Контрмеры
Активные (механические) средства противодействия могут быть применены атакуемым судном для повышения уровня шума, создания крупной ложной цели и скрытия сигнатуры самого судна.
Пассивные (т. е. не требующие электропитания) меры противодействия включают в себя:
- Монтаж шумообразующих устройств на изолирующих устройствах.
- Звукопоглощающие покрытия на корпусах подводных лодок, например безэховая плитка .
Военное применение
В современной морской войне широко используются как пассивные, так и активные гидролокаторы водных судов, самолетов и стационарных установок. Хотя активный гидролокатор использовался надводными кораблями во время Второй мировой войны , подводные лодки избегали использования активного гидролокатора из-за возможности раскрыть свое присутствие и положение силам противника. Однако появление современной обработки сигналов позволило использовать пассивный гидролокатор в качестве основного средства для операций поиска и обнаружения. в 1987 году подразделение японской компании Toshiba Сообщается, что [45] продала Советскому Союзу оборудование , которое позволяло фрезеровать лопасти винтов подводных лодок, что делало их значительно тише, что затрудняло обнаружение подводных лодок нового поколения.
Использование подводной лодкой активного гидролокатора для определения пеленга крайне редко и не обязательно дает высококачественную информацию о пеленге или дальности для группы управления огнем подводной лодки. Однако использование активной гидролокации на надводных кораблях очень распространено и используется подводными лодками, когда тактическая ситуация диктует, что более важно определить положение подводной лодки противника, чем скрыть собственное положение. В случае с надводными кораблями можно предположить, что угроза уже отслеживает корабль по спутниковым данным, поскольку любое судно, находящееся рядом с излучающим гидролокатором, обнаружит излучение. Услышав сигнал, легко определить используемое гидроакустическое оборудование (обычно по его частоте) и его положение (по энергии звуковой волны). Активный гидролокатор похож на радар тем, что, хотя он и позволяет обнаруживать цели на определенном расстоянии, он также позволяет обнаруживать излучатель на гораздо большем расстоянии, что нежелательно.
Поскольку активный гидролокатор выявляет присутствие и положение оператора и не позволяет точно классифицировать цели, его используют быстроходные (самолеты, вертолеты) и шумные платформы (большинство надводных кораблей), но редко - подводные лодки. Когда активный гидролокатор используется надводными кораблями или подводными лодками, он обычно активируется на очень короткое время с перерывами, чтобы минимизировать риск обнаружения. Следовательно, активный гидролокатор обычно считается резервной копией пассивного гидролокатора. В авиации активная гидролокация применяется в виде одноразовых гидроакустических буев , которые сбрасываются в районе патрулирования самолета или в районе возможных гидролокационных контактов противника.
Пассивный эхолот имеет ряд преимуществ, самое главное – он бесшумный. Если уровень излучаемого цели шума достаточно высок, он может иметь большую дальность действия, чем активный гидролокатор, и позволяет идентифицировать цель. Поскольку любой моторизованный объект издает некоторый шум, его в принципе можно обнаружить, в зависимости от уровня издаваемого шума и уровня окружающего шума в данном районе, а также от используемой технологии. Если упростить, с его помощью пассивный гидролокатор «видит» вокруг корабля. На подводной лодке пассивный гидролокатор, установленный в носовой части, обнаруживает в направлениях около 270 ° с центром в плоскости корабля, установленный на корпусе блок - около 160 ° с каждого борта, а буксируемый блок - на полные 360 °. Невидимые области возникают из-за помех самого корабля. Как только сигнал обнаружен в определенном направлении (что означает, что что-то издает звук в этом направлении, это называется широкополосным обнаружением), можно увеличить масштаб и проанализировать полученный сигнал (узкополосный анализ). Обычно это делается с помощью преобразования Фурье , чтобы показать различные частоты, составляющие звук. Поскольку каждый двигатель издает определенный звук, идентифицировать объект несложно. Базы данных уникальных звуков двигателей являются частью так называемого акустическая разведка или ACINT.
цели Еще одно применение пассивного гидролокатора — определение траектории . Этот процесс называется анализом движения цели (TMA), и результирующим «решением» является дальность, курс и скорость цели. ТМА выполняется путем маркировки направления звука в разное время и сравнения движения с движением собственного корабля оператора. Изменения относительного движения анализируются с использованием стандартных геометрических методов вместе с некоторыми предположениями о предельных случаях.
Пассивный гидролокатор скрытен и очень полезен. Однако он требует высокотехнологичных электронных компонентов и является дорогостоящим. Обычно он устанавливается на дорогих кораблях в виде решеток для улучшения обнаружения. Надводные корабли используют это с пользой; его еще лучше используют подводные лодки , а также самолеты и вертолеты, в основном для «эффекта неожиданности», поскольку подводные лодки могут скрываться под тепловыми слоями. Если командир подводной лодки считает, что он один, он может поднять свою лодку ближе к поверхности, чтобы ее было легче обнаружить, или пойти глубже и быстрее и, таким образом, издать больше шума.
Ниже приведены примеры применения гидролокаторов в военных целях. Многие из гражданских применений, описанных в следующем разделе, также могут быть применимы к использованию на военно-морском флоте.
Противолодочная война

До недавнего времени корабельные гидролокаторы обычно изготавливались с установленными на корпусе антеннами либо в миделе, либо в носовой части корабля. Вскоре после их первоначального использования было обнаружено, что необходимы средства снижения шума потока. Первые изготавливались из холста на каркасе, затем стали использовать стальные. Сейчас купола обычно изготавливают из армированного пластика или герметизированной резины. Такие гидролокаторы преимущественно активны в работе. Примером обычного гидролокатора, установленного на корпусе, является SQS-56.
Из-за проблем с корабельным шумом также используются буксируемые гидролокаторы. Их преимущество заключается в том, что их можно размещать глубже в воде, но есть ограничения на их использование на мелководье. Их называют буксируемыми решетками (линейными) или гидролокаторами переменной глубины (VDS) с 2/3D решетками. Проблема в том, что лебедки, необходимые для их развертывания/восстановления, большие и дорогие. Комплекты VDS преимущественно активны в работе, а буксируемые — пассивны.
Примером современного активно-пассивного корабельного гидролокатора является Sonar 2087 производства Thales Underwater Systems .
Торпеды
Современные торпеды обычно оснащены активным/пассивным гидролокатором. Его можно использовать для наведения непосредственно на цель, но с самонаводящимся следом также используются торпеды . Ранним примером акустического Гомера была торпеда Mark 37 .
Средства противодействия торпедам могут быть буксируемыми или свободными. Ранним примером было немецкое устройство Sieglinde , тогда как Bold было химическим устройством. Широко используемым в США устройством был буксируемый AN/SLQ-25 Nixie , а мобильный имитатор подводной лодки (MOSS) был бесплатным устройством. Современной альтернативой системе Nixie является система противоторпедной защиты надводных кораблей S2170 Королевского флота Великобритании .
Мины
Мины могут быть оснащены гидролокатором для обнаружения, локализации и распознавания необходимой цели. Примером может служить шахта CAPTOR .
Противоминные меры
Гидролокатор противоминной защиты (MCM), иногда называемый «гидролокатором предотвращения мин и препятствий (MOAS)», представляет собой специализированный тип гидролокатора, используемый для обнаружения небольших объектов. Большинство гидролокаторов MCM монтируются на корпусе, но некоторые типы имеют конструкцию VDS. Примером гидролокатора MCM, установленного на корпусе, является тип 2193, а гидролокатор для поиска мин SQQ-32 и системы типа 2093 представляют собой конструкции VDS.
Подводное плавание
Подводные лодки полагаются на гидролокатор в большей степени, чем надводные корабли, поскольку они не могут использовать радар в воде. Гидроакустические группы могут устанавливаться на корпусе или буксироваться. Информация о типовых посадках приведена для «Оясио» подводных лодок класса и «Swiftsure подводных лодок класса » .
Самолет

Вертолеты могут использоваться для противолодочной борьбы путем развертывания полей активно-пассивных гидроакустических буев или могут управлять погружаемым гидролокатором, таким как AQS-13 . Самолеты с неподвижным крылом также могут развертывать гидроакустические буи и обладают большей выносливостью и возможностями для их развертывания. Обработка данных с гидроакустических буев или погружающегося гидролокатора может осуществляться как на самолете, так и на корабле. Преимущество погружающегося гидролокатора состоит в том, что его можно развернуть на глубину, соответствующую повседневным условиям. Вертолеты также использовались для противоминных операций с использованием буксируемых гидролокаторов, таких как AQS-20A .
Подводная связь
На корабли и подводные лодки могут быть установлены специальные гидролокаторы для подводной связи.
Наблюдение за океаном
Соединенные Штаты начали систему пассивных стационарных систем наблюдения за океаном в 1950 году под секретным названием Sound Surveillance System (SOSUS) совместно с Американской телефонной и телеграфной компанией (AT&T), с ее исследовательской лабораторией Bell и производственными предприятиями Western Electric, заключившими контракт на разработку и установка. В системах использовался канал SOFAR , также известный как канал глубокого звука, где минимальная скорость звука создает волновод , по которому низкочастотный звук распространяется на тысячи миль. Анализ был основан на звуковом спектрографе AT&T, который преобразовывал звук в визуальную спектрограмму, представляющую собой частотно-временной анализ звука, который был разработан для анализа речи и модифицирован для анализа низкочастотных подводных звуков. Этот процесс назывался низкочастотным анализом и записью , а оборудование называлось низкочастотным анализатором и регистратором, что обозначалось аббревиатурой LOFAR. Исследование LOFAR получило название «Иезавель» и привело к его использованию в воздушных и наземных системах, особенно в гидроакустических буях, использующих этот процесс, а иногда и с использованием «Иезавель» в своем названии. [46] [47] [48] [49] Предложенная система предлагала настолько многообещающие возможности обнаружения подводных лодок на большом расстоянии, что ВМФ приказал немедленно принять меры по ее внедрению. [47] [50]

Между установкой испытательной установки, за которой последовал полномасштабный прототип оперативной установки из сорока элементов, в 1951 и 1958 годах системы были установлены в Атлантике, а затем в Тихом океане под несекретным названием « Проект Цезарь» . Первоначальные системы были отключены на секретных береговых станциях, обозначенных как Военно-морской комплекс (NAVFAC), которые, как объяснялось, занимались «океаническими исследованиями» для прикрытия своей секретной миссии. Система несколько раз модернизировалась с использованием более совершенного кабеля, позволяющего устанавливать массивы в океанских бассейнах, и улучшенной обработки. Береговые станции были ликвидированы в процессе консолидации и перенаправления массивов в центральные центры обработки в 1990-х годах. В 1985 году, когда в эксплуатацию вступили новые мобильные комплексы и другие системы, общее название системы было изменено на «Интегрированная система подводного наблюдения» (IUSS). В 1991 году предназначение системы было рассекречено. За год до того, как знаки различия IUSS были разрешены к ношению. Доступ к некоторым системам был предоставлен для проведения научных исследований. [46] [47]
Считается, что аналогичная система действовала в Советском Союзе.
Подводная безопасность
Сонар можно использовать для обнаружения водолазов и других аквалангистов . Это может быть применимо вокруг кораблей или у входов в порты. Активный гидролокатор также может использоваться в качестве механизма сдерживания и/или выведения из строя. Одним из таких устройств является система «Цербер» .

Ручной эхолот
Гидролокатор для обнаружения мин (LIMIS) — это портативный гидролокатор для отображения мин или подводный аппарат , предназначенный для патрульных водолазов (боевых водолазов или водолазов-разводчиков ) для поиска мин в условиях плохой видимости .
LUIS — еще один гидролокатор визуализации, используемый дайвером.
Интегрированная навигационная гидролокационная система (INSS) представляет собой небольшой портативный гидролокатор в форме фонарика для дайверов, отображающий дальность действия. [51] [52]
Гидролокатор перехвата
Это гидролокатор, предназначенный для обнаружения и определения местонахождения сигналов от активных гидролокаторов противника. Примером этого является Тип 2082, установленный на британских Vanguard подводных лодках класса .
Гражданские приложения
Рыболовство
Рыболовство является важной отраслью, спрос на которую растет, но мировой объем улова падает из-за серьезных проблем с ресурсами. точка устойчивости В будущем отрасль будет продолжаться всемирная консолидация до тех пор, пока не будет достигнута . Однако консолидация рыболовных флотов приводит к увеличению спроса на сложную электронику для поиска рыбы, такую как датчики, эхолоты и гидролокаторы. Исторически сложилось так, что рыбаки использовали множество различных методов для поиска и добычи рыбы. Однако акустические технологии стали одной из наиболее важных движущих сил развития современного коммерческого рыболовства.
рыбы Звуковые волны распространяются через рыбу иначе, чем через воду, потому что заполненный воздухом плавательный пузырь имеет другую плотность, чем морская вода. Эта разница в плотности позволяет обнаруживать косяки рыб с помощью отраженного звука. Акустическая технология особенно хорошо подходит для применения под водой, поскольку под водой звук распространяется дальше и быстрее, чем в воздухе. Сегодня коммерческие рыболовные суда почти полностью полагаются на акустический гидролокатор и эхолоты для обнаружения рыбы. Рыбаки также используют активные гидролокаторы и эхолоты для определения глубины воды, контура дна и состава дна.

Такие компании, как eSonar, Raymarine , Marport Canada, Wesmar, Furuno, Krupp и Simrad, производят разнообразные гидролокаторы и акустические инструменты для глубоководного коммерческого рыболовства. Например, сетевые датчики проводят различные подводные измерения и передают информацию обратно на приемник на борту судна. Каждый датчик оснащен одним или несколькими акустическими преобразователями в зависимости от его конкретной функции. Данные передаются от датчиков с помощью беспроводной акустической телеметрии и принимаются гидрофоном, установленным на корпусе. Аналоговые сигналы декодируются и преобразуются цифровым акустическим приемником в данные, которые передаются на мостовой компьютер для графического отображения на мониторе высокого разрешения.
Эхо зондирование
Эхолотирование – это процесс, используемый для определения глубины воды под кораблями и лодками. Разновидность активного гидролокатора, эхолотирование, представляет собой передачу акустического импульса непосредственно вниз на морское дно с измерением времени между передачей и возвратом эха после достижения дна и отражения обратно к кораблю, откуда он исходил. Акустический импульс излучается преобразователем, который также принимает обратное эхо. Измерение глубины рассчитывается путем умножения скорости звука в воде (в среднем 1500 метров в секунду) на время между излучением и возвращением эха. [53]
Значение подводной акустики для рыбной промышленности привело к разработке других акустических инструментов, которые работают аналогично эхолотам, но, поскольку их функции немного отличаются от исходной модели эхолота, им были присвоены другие значения. условия.
Чистое местоположение
Сетевой эхолот представляет собой эхолот с преобразователем, установленным на носу сети, а не на дне судна. Тем не менее, чтобы учесть расстояние от преобразователя до блока индикации, которое значительно больше, чем в обычном эхолоте, приходится сделать несколько доработок. Доступны два основных типа. Первый — это тип кабеля, в котором сигналы передаются по кабелю. В этом случае необходимо предусмотреть кабельный барабан, на котором можно будет буксировать, снимать и укладывать кабель на различных этапах операции. Второй тип - это бескабельный сетевой эхолот, такой как Marport's Trawl Explorer, в котором сигналы передаются акустически между сетью и приемником-гидрофоном, установленным на корпусе судна. В этом случае кабельный барабан не требуется, но необходима сложная электроника на преобразователе и приемнике.
, установленным на корпусе эхолота На дисплее эхолота отображается расстояние от сети до дна (или поверхности), а не глубина воды, как в случае с датчиком . Обычно можно увидеть веревку, прикрепленную к заголовку сетки, что указывает на производительность сетки. Также можно увидеть любую рыбу, попадающую в сеть, что позволяет выполнить точную настройку, чтобы поймать как можно больше рыбы. В других промыслах, где количество рыбы в сети имеет большое значение, датчики улова устанавливаются в различных местах на тресковом конце сети. По мере заполнения трескового конца датчики улова срабатывают один за другим, и эта информация передается акустически на мониторы на мостике судна. Затем шкипер может решить, когда вытаскивать сеть.
Современные версии эхолота, в которых используются многоэлементные преобразователи, функционируют скорее как гидролокатор, чем эхолот, и показывают фрагменты территории перед сетью, а не просто вертикальный вид, который использовался в первоначальных эхолотах.
Сонар представляет собой эхолот с функцией направленного действия, который может показывать рыбу или другие объекты вокруг судна.
ROV и UUV
Небольшие гидролокаторы были установлены на дистанционно управляемых аппаратах (ROV) и необитаемых подводных аппаратах (UUV), чтобы обеспечить их работу в пасмурных условиях. Эти гидролокаторы используются для наблюдения за автомобилем впереди. Система долгосрочной минной разведки представляет собой БПА для целей MCM.
Местоположение автомобиля
На самолетах устанавливаются гидролокаторы, которые действуют как маяки и позволяют определить их местонахождение в случае крушения в море. Для определения местоположения можно использовать гидролокаторы с короткой и длинной базой, например LBL .
Протез для слабовидящих
В 2013 году изобретатель из США представил боди с «паучьим чутьем», оснащенное ультразвуковыми датчиками и системами тактильной обратной связи , которые предупреждают владельца о приближающихся угрозах; позволяя им реагировать на нападавших даже с завязанными глазами. [54]
Научные применения
Оценка биомассы
Обнаружение рыб и других морских и водных обитателей и оценка их индивидуальных размеров или общей биомассы с использованием активных гидролокаторов. Звуковые импульсы отражаются от любого объекта, плотность которого отличается от плотности окружающей среды. Сюда относится рыба, а точнее, заполненный воздухом плавательный пузырь рыбы. [55] Эти эхо-сигналы предоставляют информацию о размере, местоположении, численности и поведении рыбы. Это особенно эффективно для плавательных пузырей рыб (например, сельди, трески и минтая) и менее полезно для рыб без них (например, акул, скумбрии и камбалы). [56] Данные из толщи воды обычно обрабатываются иначе, чем данные морского дна или обнаружения объектов. Этот тип данных можно обрабатывать с помощью специального программного обеспечения. [55]
Измерение волн
Для измерения высоты и периода волн можно использовать направленный вверх эхолот, установленный на дне или на платформе. Из этой статистики можно получить статистику состояния поверхности в определенном месте.
Измерение скорости воды
Для измерения скорости воды были разработаны специальные гидролокаторы ближнего действия.
Оценка типа дна
Были разработаны гидролокаторы, которые можно использовать для определения характеристик морского дна, например, на ил, песок и гравий. Относительно простые гидролокаторы, такие как эхолоты, можно использовать в системах классификации морского дна с помощью дополнительных модулей, преобразующих параметры эхолота в тип отложений. Существуют разные алгоритмы, но все они основаны на изменении энергии или формы отраженных звуковых сигналов. Расширенный анализ классификации субстрата может быть достигнут с использованием калиброванных (научных) эхолотов и параметрического или нечетко-логического анализа акустических данных.
Батиметрическое картографирование

Гидролокаторы бокового обзора можно использовать для получения карт топографии морского дна ( батиметрии ), перемещая гидролокатор по нему чуть выше дна. Низкочастотные гидролокаторы, такие как GLORIA, использовались для исследования всего континентального шельфа, тогда как высокочастотные гидролокаторы используются для более детальных исследований небольших территорий.
установленные на корпусе Многолучевые эхолоты, крупных надводных судов, собирают ряды батиметрических данных практически в реальном времени. Один из примеров, система General Instrument «Seabeam», использует массив прожекторов вдоль киля для озвучивания дна веерным лучом. Сигналы от группы гидрофонов, установленных поперек корабля, обрабатываются для синтеза нескольких виртуальных веерных лучей, пересекающих луч проектора под прямым углом.
Сонарная визуализация
Создание двух и трехмерных изображений с использованием данных сонара.
Этот раздел нуждается в расширении . Вы можете помочь, добавив к нему . ( июль 2024 г. ) |
Поддонное профилирование
Разработаны мощные низкочастотные эхолоты для определения профилей верхних слоев дна океана. Одним из последних устройств является многопреобразовательный параметрический SBP SES-2000 quattro компании Innomar, который используется, например, в заливе Шайба для подводных археологических целей. [57]
Обнаружение утечек газа с морского дна
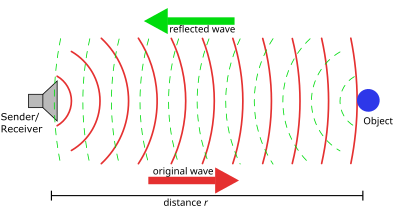
Пузырьки газа могут просачиваться с морского дна или вблизи него из нескольких источников. Они могут быть обнаружены как пассивными [58] и активный сонар [41] (показано на схематическом рисунке [58] по желтой и красной системам соответственно).

Происходят естественные выбросы метана и углекислого газа. [41] Газопроводы могут протекать, и важно иметь возможность обнаружить, происходят ли утечки из объектов улавливания и хранения углерода (CCSF; например, истощенные нефтяные скважины, в которых хранится извлеченный атмосферный углерод). [59] [60] [61] [62] Количественная оценка количества утечки газа затруднена, и хотя оценки можно сделать с использованием активных и пассивных гидролокаторов, важно поставить под сомнение их точность из-за допущений, присущих составлению таких оценок на основе данных гидролокатора. [58] [63]
Гидролокатор с синтезированной апертурой
В лаборатории были созданы различные гидролокаторы с синтезированной апертурой, и некоторые из них начали использоваться в системах поиска мин и поиска. Объяснение их работы дано в гидролокаторе с синтезированной апертурой .
Параметрический эхолот
Параметрические источники используют нелинейность воды для генерации разностной частоты между двумя высокими частотами. Формируется виртуальный массив конечного огня. Такой проектор обладает преимуществами широкой полосы пропускания, узкой ширины луча, а при полной разработке и тщательных измерениях у него нет явных боковых лепестков: см. Параметрическая решетка . Его основным недостатком является очень низкий КПД, составляющий всего несколько процентов. [64] П.Дж. Вестервелт резюмирует связанные с этим тенденции. [65]
Сонар во внеземном контексте
Использование как активного, так и пассивного гидролокатора было предложено для различных внеземных сред. [66] Одним из примеров является Титан , где активный гидролокатор может использоваться для определения глубины его углеводородных морей . [67] и пассивный гидролокатор может быть использован для обнаружения выпадений метана . [68]
Предложения, которые не учитывают должным образом разницу между земной и внеземной средой, могут привести к ошибочным измерениям. [69] [70] [71] [72] [73] [74]
Экологическое воздействие
| Часть серии о |
| Загрязнение |
|---|
 |
Влияние на морских млекопитающих

Исследования показали, что использование активного гидролокатора может привести к массовому выбросу морских млекопитающих на берег . [75] Было доказано, что клюворылы , наиболее частые жертвы выбрасывания на берег, очень чувствительны к среднечастотному активному гидролокатору. [76] Другие морские млекопитающие, такие как синий кит, также убегают от источника гидролокатора. [77] в то время как военно-морская деятельность была предложена как наиболее вероятная причина массового выброса дельфинов на берег. [78] Военно-морской флот США, который частично финансировал некоторые исследования, заявил, что результаты показывают только поведенческую реакцию на гидролокатор, а не реальный вред, но они «будут оценивать эффективность [своих] мер по защите морских млекопитающих в свете новых результатов исследований». . [75] В постановлении Верховного суда США от 2008 года об использовании гидролокатора ВМС США отмечалось, что не было случаев, когда было бы убедительно доказано, что гидролокатор причинил вред морскому млекопитающему или убил его. [79]
Некоторые морские животные, такие как киты и дельфины , используют эхолокации системы , иногда называемые биосонаром, для обнаружения хищников и добычи. Исследования воздействия гидролокатора на синих китов в заливе Южная Калифорния показывают, что использование гидролокатора средней частоты нарушает пищевое поведение китов. Это указывает на то, что вызванное гидролокатором нарушение кормления и вытеснение из участков с высококачественной добычей может иметь значительные и ранее недокументированные последствия для экологии кормления усатых китов , индивидуальной приспособленности и здоровья популяции. [80]
В 2019 году был опубликован обзор данных о массовых выбросах клюворылов на берег, связанных с военно-морскими учениями, в которых использовался гидролокатор. В нем был сделан вывод о том, что воздействие среднечастотного активного гидролокатора наиболее сильно на клюворыловых китов Кювье, но варьируется среди отдельных особей или популяций. Обзор показал, что сила реакции отдельных животных может зависеть от того, подвергались ли они ранее воздействию гидролокатора, и что у выброшенных на берег китов были обнаружены симптомы декомпрессионной болезни , которые могут быть результатом такой реакции на гидролокатор. Он отметил, что на Канарских островах, где ранее сообщалось о множественных выбросах на мель, массовых выбрасываний на мель больше не происходило после того, как в этом районе были запрещены военно-морские учения, в ходе которых использовался гидролокатор, и рекомендовал распространить запрет на другие районы, где продолжаются массовые выбросы на мель. происходить. [81] [82]
Влияние на рыбу
Низкочастотный эхолот может вызвать небольшой временный сдвиг порога слуха некоторых рыб. [83] [84] [а]
Частоты и разрешения
Частоты гидролокаторов варьируются от инфразвуковых до мегагерц. Как правило, более низкие частоты имеют больший диапазон, в то время как более высокие частоты обеспечивают лучшее разрешение и меньший размер для заданной направленности.
Для достижения разумной направленности частоты ниже 1 кГц обычно требуют больших размеров, обычно достигаемых с помощью буксируемых антенных решеток. [85]
Низкочастотные гидролокаторы широко определяются как 1–5 кГц, хотя некоторые военно-морские силы считают 5–7 кГц также низкой частотой. Средняя частота определяется как 5–15 кГц. Другой стиль разделения предполагает, что низкая частота находится ниже 1 кГц, а средняя частота - от 1 до 10 кГц. [85]
Американские гидролокаторы времен Второй мировой войны работали на относительно высокой частоте 20–30 кГц для достижения направленности с помощью достаточно небольших преобразователей с типичной максимальной рабочей дальностью 2500 ярдов. В послевоенных гидролокаторах использовались более низкие частоты для достижения большей дальности действия; например, SQS-4 работал на частоте 10 кГц с дальностью действия до 5000 ярдов. SQS-26 и SQS-53 работали на частоте 3 кГц с дальностью до 20 000 ярдов; их купола имели размер ок. 60-футовая лодка для персонала — верхний предел размера для обычных корпусных гидролокаторов. Достижение больших размеров за счет размещения конформной гидроакустической группы по корпусу до сих пор не было эффективным, поэтому для более низких частот используются линейные или буксируемые антенные решетки. [85]
Японские гидролокаторы времен Второй мировой войны работали на разных частотах. Тип 91 с 30-дюймовым кварцевым проектором работал на частоте 9 кГц. Тип 93 с кварцевыми проекторами меньшего размера работал на частоте 17,5 кГц (модель 5 с магнитострикционной частотой 16 или 19 кГц) при мощности от 1,7 до 2,5 киловатт и дальности действия до 6 км. Более поздний Тип 3 с магнитострикционными преобразователями немецкой конструкции работал на частоте 13, 14,5, 16 или 20 кГц (в зависимости от модели), используя сдвоенные преобразователи (кроме модели 1, у которой было три одиночных), при мощности от 0,2 до 2,5 киловатт. В простом типе вместо генераторов использовались магнитострикционные преобразователи с частотой 14,5 кГц и мощностью 0,25 кВт, приводимые в действие емкостным разрядом, с дальностью действия до 2,5 км. [23]
Разрешение сонара угловое; объекты, расположенные дальше друг от друга, отображаются с более низким разрешением, чем близлежащие.
В другом источнике перечислены диапазоны и разрешения в зависимости от частот для гидролокаторов бокового обзора. 30 кГц обеспечивает низкое разрешение на расстоянии 1000–6000 м, 100 кГц дает среднее разрешение на 500–1000 м, 300 кГц дает высокое разрешение на 150–500 м, а 600 кГц дает высокое разрешение на 75–150 м. На гидролокаторы большей дальности более негативно влияют неоднородности воды. Некоторые среды, обычно мелководье у побережья, имеют сложный рельеф со многими особенностями; там необходимы более высокие частоты. [86]
См. также
- Перегородки (подводная лодка) - области позади подводной лодки или корабля, где гидролокатор не слышит.
- Гордон Юджин Мартин – американский физик (1925 г.р.), гидроакустический физик
Пояснительные примечания
- ^ Халворсен и др. (2013) пришли к выводу, что наблюдаемые эффекты «обычно были небольшими, даже если рыба находилась рядом с гидролокатором и оставалась там в течение всей продолжительности трех тестовых сигналов».
Цитаты
- ^ Юрген Ровер; Михаил Монаков; Михаил Сергеевич Монаков (2001). Океанский флот Сталина: советская военно-морская стратегия и программы кораблестроения, 1935–1953 гг . Психология Пресс. п. 264. ИСБН 9780714648958 .
- ^ Глоссарий стандартизированных терминов административной практики . АФМ ВВС. Типография правительства США. 1961. с. 129 . Проверено 2 ноября 2022 г.
- ^ Перейти обратно: а б с «Сонар» . Британская энциклопедия . Проверено 18 января 2019 г.
- ^ Рэгг, Дэвид В. (1973). Словарь авиации (первое изд.). Скопа. п. 245. ИСБН 9780850451634 .
- ^ Дэвид Рибас; Пере Ридао; Хосе Нейра (26 июля 2010 г.). Подводный SLAM для структурированных сред с использованием гидролокатора визуализации . Springer Science & Business Media. ISBN 978-3-642-14039-6 .
- ^ Перейти обратно: а б Фэхи, Фрэнк (1998). Основы шума и вибрации . Джон Джерард Уокер. Тейлор и Фрэнсис. п. 375. ИСБН 978-0-419-24180-5 .
- ^ Томас Нейборс, Дэвид Брэдли (редактор), Прикладная подводная акустика: Лейф Бьорно , Elsevier, 2017, ISBN 0128112476 , стр. 8
- ^ М. А. Эйнсли (2010), Принципы моделирования характеристик сонара , Springer, стр. 10
- ^ Перейти обратно: а б Хилл, Миннесота (1962). Физическая океанография . Аллан Р. Робинсон. Издательство Гарвардского университета. п. 498.
- ^ В. Хакманн (1984), Seek and Strike , pn
- ^ Зейтц, Фредерик (1999). Космический изобретатель: Реджинальд Обри Фессенден (1866–1932) . Том. 89. Американское философское общество. стр. 41–46. ISBN 978-0-87169-896-4 .
- ^ Хендрик, Бертон Дж. (август 1914 г.). «Беспроводная связь под водой: замечательное устройство, которое позволяет капитану корабля определять точное местоположение другого корабля даже в самом густом тумане» . Мировая работа: история нашего времени . XLIV (2): 431–434 . Проверено 4 августа 2009 г.
- ^ «Отчет капитана Дж. Х. Куинана из USRC Майами о методе обнаружения айсбергов и проведении непрерывных зондирований». Вестник Гидрографического управления . 13 мая 1914 г. (цитата из стенограммы NOAA, сделанной сотрудниками Центральной библиотеки, апрель 2002 г.) . Архивировано 10 мая 2010 г. в Wayback Machine .
- ^ «Поворотный лук» . Архивировано из оригинала 26 июня 2007 г.
- ^ «Военно-морской словарь времен Второй мировой войны» . Военный корабль США «Эббот» (DD-629) . Архивировано из оригинала 12 декабря 2013 года . Проверено 12 ноября 2019 г. .
- ^ В. Хакманн, Seek & Strike: Sonar, противолодочная борьба и Королевский флот 1914–54 (HMSO, Лондон, 1984).
- ^ Берн, Алан (1993). «Приложение 6». Боевой капитан: Фредерик Джон Уокер Р.Н. и битва за Атлантику (2006, изд. Kindle). Барнсли: Перо и меч. ISBN 978-1-84415-439-5 .
- ^ Хауэт: Глава XXXIX . Вашингтон. 1963.
- ^ «Устная история AIP: Фредерик Винтон Хант, Часть II» . 23 февраля 2015 г.
- ^ из автобиографического очерка доктора Хортона и Центра подводных боевых действий Министерства ВМС США.
- ^ Хортон, Дж. Уоррен (1957). Основы сонара . Военно-морской институт США, Аннаполис, Мэриленд. п. 387.
- ^ Фрэнк Масса. Сонарные датчики: история, заархивированная 18 апреля 2015 г. в Wayback Machine
- ^ Перейти обратно: а б «Японский эхолот и Asdic» (PDF) . Архивировано из оригинала (PDF) 24 сентября 2015 г. Проверено 8 мая 2015 г.
- ^ Шерман, Чарльз Х; Батлер, Джон Л; Браун, Дэвид А. (2008). «Преобразователи и матрицы для подводного звука» . Журнал Акустического общества Америки . 124 (3): 1385. Бибкод : 2008ASAJ..124.1385S . дои : 10.1121/1.2956476 . ISBN 9780387331393 . Архивировано из оригинала 26 апреля 2018 г.
- ^ «Базовая гидролокационная система (активная)» . fas.org . Архивировано из оригинала 22 июня 2020 г. Проверено 22 июня 2020 г.
- ^ Бьёрнё, Лейф (2017). «Голокационные системы». Прикладная подводная акустика . Эльзевир. ISBN 978-0-12-811240-3 .
- ^ Такер, генеральный директор; Газей, Б.К. (1966). Прикладная подводная акустика . Пергамон Пресс.
- ^ Министерство торговли США, Национальное управление океанических и атмосферных исследований. «Исследователь океана NOAA: Технология: Инструменты наблюдения: SONAR» . Oceanexplorer.noaa.gov . Архивировано из оригинала 22 июня 2020 г. Проверено 22 июня 2020 г.
- ^ Авраам, Д.А. (2017). «Обработка сигналов». Прикладная подводная акустика . Эльзевир. ISBN 978-0-12-811240-3 .
- ^ МакКлинтон, AT (7 сентября 1967 г.). Сводный отчет об акустических источниках проекта Artemnis (PDF) (Отчет). Вашингтон, округ Колумбия: Исследовательская лаборатория ВМС США. п. iv. Архивировано (PDF) из оригинала 11 июня 2020 г. Проверено 19 апреля 2020 г.
- ^ Эрскин, Фред Т. III (август 2013 г.). История акустического отдела Военно-морской исследовательской лаборатории за первые восемь десятилетий 1923–2008 гг. (PDF) (Отчет). Вашингтон, округ Колумбия: Военно-морская исследовательская лаборатория. стр. 59–63. Архивировано (PDF) из оригинала 10 июня 2020 г. Проверено 19 апреля 2020 г.
- ^ «Легкий транспондер срабатывания (LAT)» . Сонардин . Архивировано из оригинала 23 июня 2020 г. Проверено 23 июня 2020 г.
- ^ Перейти обратно: а б ISO 18405:2017 Акустика подводная. Терминология. Уравнение сонара, запись 3.6.2.3
- ^ Коннолли, Уильям (29 мая 2005 г.). «Горностай: Морской лед: Чем я занимаюсь в свободное время :-)» . Горностай . Проверено 19 октября 2017 г.
- ^ Фиссель, Д.Б.; Марко, младший; Меллинг, Х. (1 января 2008 г.). «Достижения в области гидролокаторов восходящего обзора для изучения процессов изменения ледового климата Северного Ледовитого океана» . Журнал оперативной океанографии . 1 (1): 9–18. Бибкод : 2008JOO.....1....9F . дои : 10.1080/1755876X.2008.11081884 . ISSN 1755-876X . S2CID 125961523 .
- ^ «Мышление синего моря» . Экономист: Technology Quarterly . 10 марта 2018 г. Архивировано из оригинала 09.11.2020 . Проверено 16 ноября 2020 г.
- ^ «Наука о звуке» . www.usff.navy.mil . Командование ВМС США . Проверено 30 октября 2023 г.
- ^ М. А. Эйнсли (2010), Принципы моделирования характеристик сонара, Springer, стр. 68
- ^ Лейтон, Т.Г.; Коулз, DCH; Срокош, М.; Уайт, PR; Вульф, ДК (2018). «Асимметричный перенос CO2 через нарушенную морскую поверхность» . Научные отчеты . 8 (1): 8301. Бибкод : 2018NatSR...8.8301L . дои : 10.1038/s41598-018-25818-6 . ПМЦ 5974314 . ПМИД 29844316 .
- ^ Вульф, ДК; Торп, Ю.А. (1991). «Выброс метана с морского дна вдоль континентальной окраины Западного Шпицбергена». Дж. Мар. Рес . 49 (3): 435–466. дои : 10.1357/002224091784995765 .
- ^ Перейти обратно: а б с Уэстбрук, ГК; Тэтчер, Кентукки; Ролинг, Э.Дж.; Пиотровский, AM; Пялике, Х.; Осборн, АХ; Нисбет, Е.Г.; Миншалл, штат Техас; Лануазель, М.; Джеймс, Р.Х.; Хюнербах, В.; Грин, Д.; Фишер, Р.Э.; Крокер, Эй Джей; Шабер, А.; Болтон, К.; Бещинская-Мёллер, А.; Берндт, К.; Аквилина, А. (2009). «Выброс метана с морского дна вдоль континентальной окраины Западного Шпицбергена» (PDF) . Дж. Мар. Рес . 36 (15): L15608. Бибкод : 2009GeoRL..3615608W . дои : 10.1029/2009GL039191 .
- ^ Перейти обратно: а б с Лейтон, Т.Г.; Финфер, округ Колумбия; Уайт, PR; Чуа, Г. – Х.; Дикс, Дж. К. (2010). «Подавление и классификация помех с использованием двойного инвертированного импульсного гидролокатора (TWIPS)» (PDF) . Труды Королевского общества А. 466 (2124): 3453–3478. Бибкод : 2010RSPSA.466.3453L . дои : 10.1098/rspa.2010.0154 . S2CID 111066936 .
- ^ Лейтон, Т.Г.; Чуа, GH; Белый, PR (2012). «Получают ли дельфины пользу от нелинейной математики при обработке сигналов сонара?» (PDF) . Труды Королевского общества А. 468 (2147): 3517–3532. Бибкод : 2012RSPSA.468.3517L . дои : 10.1098/rspa.2012.0247 . S2CID 109255100 .
- ^ Лейтон, Т.Г.; Финфер, округ Колумбия; Чуа, GH; Уайт, PR; Дикс, Дж. К. (2011). «Подавление и классификация помех с использованием двойного инвертированного импульсного гидролокатора в следах корабля» (PDF) . Журнал Акустического общества Америки . 130 (5): 3431–7. Бибкод : 2011ASAJ..130.3431L . дои : 10.1121/1.3626131 . ПМИД 22088017 .
- ^ «Как советская «Акула» изменила подводную войну» . Фокстрот Альфа . 13 октября 2017 г. Проверено 15 января 2020 г.
- ^ Перейти обратно: а б Уитмен, Эдвард К. (зима 2005 г.). «СОСУС: «Секретное оружие» подводного наблюдения» . Подводная война . Том. 7, нет. 2. Архивировано из оригинала 24 марта 2020 года . Проверено 5 января 2020 г.
- ^ Перейти обратно: а б с «История Интегрированной системы подводного наблюдения (IUSS) 1950–2010 гг.» . Ассоциация выпускников IUSS/CAESAR . Проверено 22 мая 2020 г.
- ^ Мунк, Уолтер Х.; Шпиндел, Роберт С.; Баггерер, Артур; Бердсолл, Теодор Г. (20 мая 1994 г.). «Технико-экономическое обоснование острова Херд» (PDF) . Журнал Акустического общества Америки . 96 (4). Акустическое общество Америки: 2330–2342. Бибкод : 1994ASAJ...96.2330M . дои : 10.1121/1.410105 . Проверено 26 сентября 2020 г.
- ^ Либерман, Филип; Блюмштейн, Шейла Э. (4 февраля 1988 г.). Физиология речи, восприятие речи и акустическая фонетика . Кембридж, Кембриджшир, Великобритания/Нью-Йорк: Издательство Кембриджского университета. стр. 51–52. ISBN 0521308666 . LCCN 87013187 . Проверено 22 мая 2020 г.
- ^ «Истоки СОСУСа» . Командир подводного наблюдения. Архивировано из оригинала 7 августа 2020 года . Проверено 22 мая 2020 г.
- ^ Лент, К. (2002). «Сонар для дайверов со сверхвысоким разрешением» . Отчет в Управление военно-морских исследований . Архивировано из оригинала 8 октября 2008 г. Проверено 11 августа 2008 г.
{{cite journal}}: CS1 maint: неподходящий URL ( ссылка ) - ^ Крюгер, Кеннет Л. (5 мая 2003 г.). «Дайверские карты и графическое отображение» . Техасский университет в лабораториях прикладных исследований Остина. Архивировано из оригинала 13 августа 2009 г. Проверено 21 января 2009 г.
{{cite web}}: CS1 maint: неподходящий URL ( ссылка ) - ^ «Исследователь океана NOAA: чтение эхолота» . Архивировано из оригинала 10 сентября 2015 г.
- ^ «Этот костюм дает вам настоящее паучье чутье» . Форбс . 23 февраля 2013 года. Архивировано из оригинала 27 февраля 2013 года . Проверено 12 марта 2013 г.
- ^ Перейти обратно: а б Рыболовство, НОАА (07 января 2021 г.). «Методы акустического исследования хека на западном побережье | Рыболовство NOAA» . НОАА . Проверено 29 июля 2023 г.
- ^ Стауглер, Бетти (15 октября 2019 г.). «Невесомость в воде» . Расширение UF/IFAS, округ Шарлотт . Проверено 29 июля 2023 г.
- ^ Пыдин, Анджей; Попек, Матеуш; Кубачка, Мария; Яновский, Лукаш (08 мая 2021 г.). «Исследование и реконструкция средневековой гавани с использованием гидроакустики, трехмерной мелкой сейсмики и подводной фотограмметрии: пример из Пуцка, южная часть Балтийского моря» . Археологическая разведка . 28 (4): 527–542. Бибкод : 2021ArchP..28..527P . дои : 10.1002/arp.1823 .
- ^ Перейти обратно: а б с д Лейтон, Т.Г.; Белый, PR (2012). «Количественная оценка подводных утечек газа из объектов улавливания и хранения углерода, из трубопроводов и из источников метана по их акустической эмиссии» (PDF) . Труды Королевского общества А. 468 (2138): 485–510. Бибкод : 2012RSPSA.468..485L . дои : 10.1098/rspa.2011.0221 . S2CID 108841954 .
- ^ Блэкфорд, Дж.; Шталь, Х.; Булл, Дж.; и др. (28 сентября 2014 г.). «Обнаружение и последствия утечек из подморских глубинных геологических хранилищ углекислого газа» (PDF) . Природа Изменение климата . 4 (11): Опубликовано в Интернете. Бибкод : 2014NatCC...4.1011B . дои : 10.1038/nclimate2381 . S2CID 54825193 .
- ^ Бержес, Б.Дж.П; Лейтон, Т.Г.; Белый, PR (2015). «Пассивное акустическое количественное определение газовых потоков в экспериментах по контролируемому выделению газа» . Международный журнал по контролю парниковых газов . 38 : 64–79. Бибкод : 2015IJGGC..38...64B . дои : 10.1016/j.ijggc.2015.02.008 .
- ^ Ханнис, С.; Чедвик, А.; Пирс, Дж.; и др. (2015). «Обзор морского мониторинга проектов CCS» (PDF) . Технический отчет IEAGHG 2015-02 (июль 2015 г.) : Авторские права принадлежат IEAGHG, 2016 г.
- ^ Ханнис, С.; Чедвик, А.; Коннелли, Д.; и др. (2017). «Обзор мониторинга морских хранилищ CO2: Опыт эксплуатации и исследований по соблюдению нормативных и технических требований» . Энергетическая процедура . 114 : 5967–5980. дои : 10.1016/j.egypro.2017.03.1732 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2011). «Обзор сечений рассеяния и затухания, коэффициентов затухания и резонансных частот сферического газового пузыря» (PDF) . Журнал Акустического общества Америки . 130 (5): 3184–3208. Бибкод : 2011ASAJ..130.3184A . дои : 10.1121/1.3628321 . ПМИД 22087992 .
- ^ Х.О. Берктай, Некоторые эффекты конечной амплитуды в подводной акустике в книге В.М. Альберса «Подводная акустика», 1967 г.
- ^ Вестервельт, П.Дж. (1963). Параметрическая акустическая решетка. Журнал Акустического общества Америки, 35 (4), 535–537.
- ^ Лейтон, Т.Г.; Петкулеску, А. (1 августа 2016 г.). «Акустические и связанные с ними волны во внеземной среде» (PDF) . Журнал Акустического общества Америки . 140 (2): 1397–1399. Бибкод : 2016ASAJ..140.1397L . дои : 10.1121/1.4961539 . ISSN 0001-4966 . ПМИД 27586765 .
- ^ Арвело и Лоренц (2013), J Acoust Soc Am
- ^ Лейтон, Т.Г.; Уайт, PR; Финфер, округ Колумбия (2005). «Шумы моря в космосе» (PDF) . Материалы Международной конференции по подводным акустическим измерениям, технологиям и результатам, Ираклион, Крит, 28 июня – 1 июля 2005 г. II : 833–840.
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2016). «Уравнения гидролокатора для исследования планет» (PDF) . Журнал Акустического общества Америки . 140 (2): 1400–1419. Бибкод : 2016ASAJ..140.1400A . дои : 10.1121/1.4960786 . ПМИД 27586766 .
- ^ Лейтон, Т.Г.; Финфер, округ Колумбия; Белый, PR (2008). «Проблемы акустики на маленькой планете» (PDF) . Икар . 193 (2): 649–652. Бибкод : 2008Icar..193..649L . дои : 10.1016/j.icarus.2007.10.008 .
- ^ Цзян, Дж; Байк, К; Лейтон, Т.Г. (2011). «Затухание звука, фазовая и групповая скорости в трубах, заполненных жидкостью II: моделирование источников расщепительных нейтронов и исследование планет» (PDF) . Журнал Акустического общества Америки . 130 (2): 695–706. Бибкод : 2011ASAJ..130..695J . дои : 10.1121/1.3598463 . ПМИД 21877784 .
- ^ Лейтон, Т.Г. (2009). «Эффекты нагрузки жидкостью для акустических датчиков в атмосферах Марса, Венеры, Титана и Юпитера» (PDF) . Журнал Акустического общества Америки . 125 (5): EL214–9. Бибкод : 2009ASAJ..125L.214L . дои : 10.1121/1.3104628 . ПМИД 19425625 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2009). «Поправки акустического поперечного сечения, близкие к резонансному пузырю, включая примеры из океанографии, вулканологии и биомедицинского ультразвука» (PDF) . Журнал Акустического общества Америки . 126 (5): 2163–75. Бибкод : 2009ASAJ..126.2163A . дои : 10.1121/1.3180130 . ПМИД 19894796 .
- ^ Лейтон, Т.Г.; Уайт, PR; Финфер, округ Колумбия (2012). «Возможности и проблемы использования внеземной акустики при исследовании океанов ледяных планетных тел» (PDF) . Земля, Луна и планеты . 109 (1–4): 99–116. Бибкод : 2012EM&P..109...91L . дои : 10.1007/s11038-012-9399-6 . S2CID 120569869 .
- ^ Перейти обратно: а б Дамиан Кэррингтон (3 июля 2013 г.). «Как показывают исследования, киты бегут от военного гидролокатора, что приводит к их массовому выбросу на берег» . Хранитель . Архивировано из оригинала 1 октября 2017 года.
- ^ Стейси Л. ДеРуитер; Брэндон Л. Саутхолл; Джон Каламбокидис; Уолтер М.Х. Циммер; Динара Садыкова; Эрин А. Фальконе; Ари С. Фридлендер; Джон Э. Джозеф; Дэвид Моретти; Грегори С. Шорр; Лен Томас; Питер Л. Тайак (2013). «Первые прямые измерения поведенческих реакций клюворылых китов Кювье на среднечастотный активный гидролокатор» . Письма по биологии . 9 (4): 20130223. doi : 10.1098/rsbl.2013.0223 . ПМЦ 3730631 . ПМИД 23825085 .
- ^ Гольдбоген Дж.А.; Саутхолл, БЛ; Деруитер С.Л.; Каламбокидис Дж.; Фридлендер АС; Хазен Э.Л.; Фальконе Э.А.; Шорр Г.С.; Дуглас А.; Моретти диджей; Кибург С.; Маккенна МФ; Тайак П.Л. (3 июля 2013 г.). «Синие киты реагируют на симуляцию военного гидролокатора средней частоты» . Труды Королевского общества Б. 280 (765): 20130657. doi : 10.1098/rspb.2013.0657 . ПМЦ 3712439 . ПМИД 23825206 .
- ^ Джепсон ПД; Девиль Р.; Асеведо-Уайтхаус К.; и др. (30 апреля 2013 г.). «Что стало причиной крупнейшего в Великобритании массового выбрасывания на берег обыкновенного дельфина (Delphinus delphis)?» . ПЛОС ОДИН . 8 (4): e60953. Бибкод : 2013PLoSO...860953J . дои : 10.1371/journal.pone.0060953 . ПМК 3640001 . ПМИД 23646103 .
- ^ Зима против Совета по защите национальных ресурсов. Архивировано 9 декабря 2017 г. в Wayback Machine № 07–1239, октябрь 2008 г.
- ^ Гольдбоген Дж.А.; Саутхолл, БЛ; Деруитер С.Л.; Каламбокидис Дж.; Фридлендер АС; Хазен Э.Л.; Фальконе Э.А.; Шорр Г.С.; Дуглас А.; Моретти диджей; Кибург С.; Маккенна МФ; Тайак П.Л. (3 июля 2013 г.). «Синие киты реагируют на симуляцию военного гидролокатора средней частоты» . Труды Королевского общества Б. 280 (765): 20130657. doi : 10.1098/rspb.2013.0657 . ПМЦ 3712439 . ПМИД 23825206 .
- ^ Бернальдо де Кирос Ю; Фернандес А; Бэрд Р.В.; и др. (30 января 2019 г.). «Достижения в исследованиях воздействия противолодочных гидролокаторов на клюворылых китов» . Труды Королевского общества Б. 286 (1895): 20182533. doi : 10.1098/rspb.2018.2533 . ПМК 6364578 . ПМИД 30963955 .
- ^ Бэтчелор, Том (30 января 2019 г.). «Ученые требуют запрета военных гидролокаторов, чтобы положить конец массовому выбрасыванию китов на берег» . Независимый .
- ^ Поппер А.Н.; Халворсен М.Б.; Кейн А.; Миллер Д.Л.; Смит М.Э.; Сон Дж.; Высоцкий Л.Е. (2007). «Воздействие высокоинтенсивного низкочастотного активного гидролокатора на радужную форель». Журнал Акустического общества Америки . 122 (1): 623–635. Бибкод : 2007ASAJ..122..623P . дои : 10.1121/1.2735115 . ПМИД 17614519 .
- ^ Халворсен М.Б.; Зедди Д.Г.; Чикойн Д.; Поппер А.Н. (2013). «Влияние низкочастотного воздействия морского гидролокатора на три вида рыб» . Журнал Акустического общества Америки . 134 (2): EL205–EL210. Бибкод : 2013ASAJ..134L.205H . дои : 10.1121/1.4812818 . ПМИД 23927226 .
- ^ Сёрейде, Фредрик (28 апреля 2011 г.). Корабли из глубин . Издательство Техасского университета A&M. ISBN 9781603442183 . Архивировано из оригинала 26 апреля 2018 г.
Общая библиография
- Дринг, Томас Р. (март 2018 г.). «Крутая кривая обучения: влияние гидроакустических технологий, обучения и тактики на первые годы противолодочной войны ВМС США во Второй мировой войне». Военный корабль Интернешнл . Л.В. (январь 2018 г.): 37–57. ISSN 0043-0374 .
- Хакманн, Виллем. Seek & Strike: гидролокатор, противолодочная борьба и Королевский флот 1914–54 . Лондон: Канцелярия Ее Величества, 1984. ISBN 0-11-290423-8 .
- Хакманн, Виллем Д. «Голокационные исследования и военно-морская война 1914–1954: пример науки двадцатого века» (требуется подписка) . Исторические исследования в области физических и биологических наук 16 № 1 (январь 1986 г.) 83–110. дои : 10.2307/27757558 .
- Урик, Р.Дж. (1983). Принципы подводного звука (3-е издание). Лос-Альтос: Издательство полуострова. ISBN 9780932146625 . OCLC 1132503817 .
Справочные материалы по акустике рыболовства
- Исследования акустики рыболовства (FAR) в Вашингтонском университете
- Протоколы NOAA для акустических исследований рыболовства
- Акустика в распакованном виде. Архивировано 16 сентября 2017 г. на Wayback Machine. Отличный справочник по пресноводной гидроакустике для оценки ресурсов.
- «АКУСТИКА В РЫБОЛОВСТВЕ И ВОДНОЙ ЭКОЛОГИИ»
- «Гидроакустический протокол – озера, водохранилища и равнинные реки» (для оценки рыбы)
- Симмондс, Э. Джон и Д.Н. МакЛеннан. Акустика рыболовства: теория и практика , второе издание. Серия «Рыба и водные ресурсы», 10. Оксфорд: Blackwell Science, 2003. ISBN 978-0-632-05994-2 .
Дальнейшее чтение
- «Канада: стабильный звук» , Time , 28 октября 1946 года. Интересный отчет о 4800 гидролокаторах ASDIC, тайно изготовленных в Каса Лома , Торонто , во время Второй мировой войны. Проверено 25 сентября 2009 г.
- «Радар глубин — SONAR» , Popular Science , ноябрь 1945 г., стр. 84–87, 246, 250: одна из лучших общедоступных статей по этой теме.
Внешние ссылки
- Факты FFI: гидролокаторы и морская среда Норвежского института оборонных исследований (FFI)
- Дистанционное зондирование для управления прибрежными районами: однолучевой гидролокатор — Центр прибрежных служб, Национальное управление океанических и атмосферных исследований.
