Сонар


Сонар ( звуковая навигация и дальности или звуковая навигация и эпоха ) [ 2 ] является методикой, которая использует размножение звука (обычно под водой, как при подводной навигации ) для навигации , измерения расстояний ( в диапазоне ), общения или обнаружения объектов на или под поверхностью воды, например, другие сосуды. [ 3 ]
«Сонар» может относиться к одному из двух типов технологий: пассивный сонар означает прослушивание звука, изданного судами; Активный сонар означает излучение импульсов звуков и прослушивание эхо. Сонар может использоваться в качестве средства акустического расположения и измерения эха характеристик «целей» в воде. [ 4 ] Акустическое расположение в воздухе использовалось до введения радара . Сонар также может быть использован для навигации роботов, [ 5 ] и Sodar (вверх выглядящий в эфире) используется для атмосферных исследований. Термин Sonar также используется для оборудования, используемого для создания и получения звука. Акустические частоты, используемые в системах сонарных систем, варьируются от очень низкого ( инфразионного ) до чрезвычайно высокого ( ультразвукового ). Изучение подводного звучания известно как подводная акустика или гидроакустика .
Первое записанное использование техники было в 1490 году Леонардо да Винчи , который использовал трубку, вставленную в воду, чтобы обнаружить сосуды на слух. [ 6 ] Он был разработан во время Первой мировой войны, чтобы противостоять растущей угрозе подводной войны , с оперативной пассивной системой сонар , используемой к 1918 году. [ 3 ] Современные активные Sonar Systems использует акустический преобразователь для генерации звуковой волны, которая отражается на целевых объектах. [ 3 ]
История
Хотя некоторые животные ( дельфины , летучие мыши , некоторые строги и другие) использовали звук для общения и обнаружения объектов в течение миллионов лет, использование людей в воде было первоначально записано Леонардо да Винчи в 1490 году: трубка, вставленная в воду Говорят, что можно использовать для обнаружения сосудов, поместив ухо в трубку. [ 6 ]
В конце 19 -го века подводной колокол использовался в качестве вспомогательного для маяков или световых кораблей, чтобы обеспечить предупреждение об опасностях. [ 7 ]
Использование звука для «эхо-лодовой» подводна так же, как летучие мыши используют звук для аэродиальной навигации, по-видимому, вызвано стихийным бедствием Титаника 1912 года. [ 8 ] Первый в мире патент на подводное эхоподобное устройство был подан в Британское патентное управление английским метеорологом Льюисом Фрай Ричардсоном через месяц после погружения Титаника , [ 9 ] и немецкий физик Александр Бим получил патент на эхо -эхолот в 1913 году. [ 10 ]
Канадский инженер Реджинальд Фессенден , работая в подводной сигнальной компании в Бостоне , штат Массачусетс, построил экспериментальную систему, начиная с 1912 года, система, позже протестированная в Бостонской гавани, и, наконец, в 1914 году из американского вырезки Miami на Grand Banks от Newfoundland. Полем [ 9 ] [ 11 ] В этом тесте Фессенден продемонстрировал звучание глубины, подводные связи ( код Морса ) и эхо-диапазон (обнаружение айсберга в диапазоне 2 миль (3,2 км)). [ 12 ] [ 13 ] « Осциллятор Фессенден », работающий на частоте около 500 Гц, не смог определить подшипник айсберга из-за 3-метровой длины волны и небольшого размера излучающей лица преобразователя (меньше, чем 1 ~ 3 длина волны в диаметре). Десять Монреале построенных в британские подводные лодки H -класса, запущенные в 1915 году, были оснащены генераторами Фессенден. [ 14 ]
Во время Первой мировой войны необходимость обнаружения подводных лодок вызвала дополнительные исследования по использованию звука. Британцы раннее использование подводных устройств для прослушивания, называемых гидрофонами , в то время как французский физик Пол Ланжевин , работая с российским инженером -электриком -иммигрантом Константина Чиллоуски, работал над разработкой активных звуковых устройств для обнаружения подводных лодок в 1915 году. Хотя пьезоэлектрические и магнитострикционные преобразователи позже заменены. Электростатические преобразователи , которые они использовали, эта работа повлияла на будущие дизайны. Легкая чувствительная к звуку пластиковая пленка и волокна использовались для гидрофонов, в то время как терфенол-D и свинцовый магний для проекторов были разработаны (PMN).
Асдик

В 1916 году в рамках Британского совета по изобретению и исследованиям канадский физик Роберт Уильям Бойл принял проект по обнаружению активного звука с AB Wood , создав прототип для тестирования в середине 1917 года. Эта работа для антинодочного подразделения британского военно-морского персонала была проведена в максимальной секретности и использовала кварцевые пьезоэлектрические кристаллы для производства первого в мире практического подводного подводного аппарата активного выявления звука. Чтобы поддерживать секретность, не было упоминаться о звуковых экспериментах или кварце, - слово, используемое для описания ранней работы («Supersonics»), было изменено на «ASD» ICS, а кварцевый материал на «asd»: «asd» для »для» для »для» Анти-субмаренная дивизия », отсюда британская аббревиатура Asdic . В 1939 году, в ответ на вопрос из Оксфордского словаря английского языка , Адмиралтейство составило историю, которую он выступал за «комитет по расследованию обнаружения подводных лодок», и это все еще широко верит, [ 15 ] Хотя ни один комитет с этим именем не был найден в архивах Адмиралтейства. [ 16 ]
К 1918 году Британия и Франция построили прототип активных систем. Британцы проверили свой ASDIC на HMS Antrim имела сосуды ASDIC. Осплайская школьная школьная школа и в 1920 году и начали производство в 1922 году. В 1923 году 6-я флотилия эсминца тренировочная флотилья из четырех судов была создана в Портленде в 1924 году.
В начале Второй мировой войны у Королевского флота было пять комплектов для различных классов поверхностных кораблей, а другие для подводных лодок, включенных в полную анти-субмаренную систему. Эффективность раннего ASDIC была затруднена использованием глубинного заряда в качестве анти-подключенного оружия. Это требовало, чтобы атакующее судно пропустило погруженный контакт, прежде чем бросить заряды над кормой, что привело к потере контакта с ASDIC в моменты, предшествовавшие атаке. Охотник эффективно стрелял слепым, в течение которого командир подводной лодки мог предпринять уклончивые действия. Эта ситуация была исправлена новой тактикой и новым оружием.
Тактические улучшения, разработанные Фредериком Джоном Уокером, включали ползуческую атаку. Для этого были необходимы два антиловодочных корабля (обычно шлюпы или корветы). «Directing Ship» отслеживал целевую подводную лодку на ASDIC с позиции примерно в 1500 до 2000 ярдов от подводной лодки. Второй корабль с ее ASDIC выключился и работал со скоростью 5 узлов, начал атаку с позиции между режиссерским кораблем и целью. Эта атака контролировалась радиосоневом с режиссерского корабля, основанного на их ASDIC и диапазоне (от RangeFinder) и подшипника атакующего корабля. Как только заряды на глубину были выпущены, атакующий корабль покинул непосредственную площадь на полной скорости. Затем направляющий корабль вошел в целевую область, а также выпустил шаблон зарядов глубины. Низкая скорость подхода означала, что подводная лодка не могла предсказать, когда будут выпущены заряды глубины. Любое уклончивое действие было обнаружено направляющим кораблем и приказом рулевого управления на атакующем корабле, данном соответствующим образом. Низкая скорость атаки имела то преимущество, что Немецкая акустическая торпеда не была эффективной против военного корабля, путешествующего так медленно. Изменением ползучей атаки была атака «штукатурка», в которой три атакующих корабля, работающие на близкой линии в ряд, были направлены над целью направляющим кораблем. [ 17 ]
Новое оружие для борьбы со слепой пятной Asdic было «впереди оружие», такое как ежи , а затем и кальмары , которые проецировали боеголовки на цель, впереди атакующего и все еще находятся в контакте с Asdic. Это позволило одному эскорту сделать более целенаправленные атаки на подводные лодки. Развития во время войны привели к британским наборам ASDIC, в которых использовались несколько различных форм луча, непрерывно покрывая слепые пятна. Позже акустические торпеды были использованы .
В начале Второй мировой войны (сентябрь 1940 года) британская технология ASDIC была бесплатно передана в Соединенные Штаты. Исследования ASDIC и подводного звучания были расширены в Великобритании и в США. Было разработано много новых видов обнаружения военных звуков. К ним относятся Sonobuoys , впервые разработанные англичанами в 1944 году под кодовым чаем , погружением/сонаром для погружения/ сонара с шахтом . Эта работа сформировала основу для послевоенных событий, связанных с противодействием ядерной подводной лодке .
Сонар
В течение 1930-х годов американские инженеры разработали свою собственную подводную технологию определения звука, и были сделаны важные открытия, такие как существование термоклинов и их влияние на звуковые волны. [ 18 ] Американцы начали использовать термин Sonar для своих систем, придуманных Фредериком Хантом, чтобы быть эквивалентом радара . [ 19 ]
Военно -морской флот подводной звуковой лаборатории
В 1917 году военно -морской флот США Дж. Уоррена Хортона впервые приобрел услуги . В отпуске Bell Labs он служил правительству в качестве технического эксперта, сначала на экспериментальной станции в Наханте, штат Массачусетс , а затем в военно -морской штаб -квартире США, в Лондоне , Англия. В Наханте он применил недавно разработанную вакуумную трубку , а затем ассоциировалась с стадиями формирования области прикладной науки, которая теперь известна как электроника , к обнаружению подводных сигналов. В результате микрофон кнопки углеродной кнопки , который использовался в более раннем оборудовании для обнаружения, был заменен предшественником современного гидрофона . Также в течение этого периода он экспериментировал с методами обнаружения буксировки. Это было связано с повышенной чувствительностью его устройства. Принципы все еще используются в современных буксируемых сонарных системах.
Чтобы удовлетворить потребности Великобритании Великобритании, его отправили в Англию для установки в ирландских гидрофонах, установленных на дне, подключенных к берегу прослушивания подводным кабелем. В то время как это оборудование было загружено на кабельное судно, Первая мировая война закончилась, и Хортон вернулся домой.
Во время Второй мировой войны он продолжал развивать сонарские системы, которые могли обнаружить подводные лодки, шахты и торпеды. Он опубликовал основы Sonar в 1957 году в качестве главного консультанта по исследованиям в подводной звуковой лаборатории ВМС США . Он занимал эту должность до 1959 года, когда стал техническим директором, и он занимал до обязательного выхода на пенсию в 1963 году. [ 20 ] [ 21 ]
Материалы и проекты в США и Японии
год в США было мало прогресса . 1915 по 1940 С в сферическом жилье. Эта сборка проникла в корпус корабля и была вручную повернута под желаемый угол. У пьезоэлектрического солевого кристалла Рошель был лучшие параметры, но магнитостриктивный блок был гораздо более надежным. Высокие убытки для торговых торговцев в начале Второй мировой войны привели к крупномасштабным исследованиям в области США в этой области, что приведет к улучшению магнитострикционных параметров преобразователя и надежности соли Rochelle. Дигидрофосфат аммония (ADP), превосходная альтернатива, была обнаружена в качестве замены соли Rochelle; Первым применением была замена 24 кГц транс-датчиков Rochelle-Salt. В течение девяти месяцев Рошель Соль устарела. Производство ADP выросла с нескольких десятков персонала в начале 1940 года до нескольких тысяч в 1942 году.
Одним из самых ранних применений кристаллов ADP были гидрофоны для акустических рудников ; Кристаллы были указаны для низкочастотного отсечения при 5 Гц, противостоять механическому шоку для развертывания с самолета от 3000 м (10 000 футов) и способность пережить соседние взрывы шахты. Одной из ключевых особенностей надежности ADP являются ее нулевые характеристики старения; Кристалл сохраняет свои параметры даже после длительного хранения.
Еще одно применение было для акустических торпедов. Две пары направленных гидрофонов были установлены на торпедном носу, в горизонтальной и вертикальной плоскости; Разница сигналов от пар использовалась для управления торпедом влево-правом и вверх. Была разработана контрмеза: целевая подводная лодка сброшена шипучим химическим веществом, а торпеда пошла за более шумной газированной приманкой. Контр-контр-терминацией представляла собой торпеду с активным сонаром-к торпедному носу добавляли преобразователь, а микрофоны прислушивались к его отраженным периодическим всплескам тона. Преобразователи включали идентичные прямоугольные кристаллические пластины, расположенные для алмазных областей в ошеломленных рядах.
Пассивные сонарские массивы для подводных лодок были разработаны из кристаллов ADP. Несколько кристаллических сборок были расположены в стальной трубке, заполненной вакуумом касторовым маслом и запечатаны. Затем трубки были установлены в параллельных массивах.
Стандартный сканирующий сонар ВМС США в конце Второй мировой войны работал при 18 кГц, используя множество кристаллов ADP. Однако желаемый более длительный диапазон требовал использования более низких частот. Требуемые размеры были слишком большими для кристаллов ADP, поэтому в начале 1950 -х годов были разработаны магнитострикционные и титановые пьезоэлектрические системы бария, но у них были проблемы с достижением однородных характеристик импеданса, и шаблон луча пострадал. Затем титанат бария заменяли более стабильным цирконатным цирконатом (PZT), и частоту снижали до 5 кГц. Американский флот использовал этот материал в Sonar AN/SQS-23 в течение нескольких десятилетий. SQS-23 Sonar впервые использовал никелевые преобразователи магнитострикции, но они весили несколько тонн, а никель был дорогим и считался критическим материалом; Поэтому пьезоэлектрические преобразователи были заменены. Сонар был большим количеством 432 отдельных преобразователей. Сначала преобразователи были ненадежными, показывая механические и электрические сбои и ухудшались вскоре после установки; Они также были произведены несколькими поставщиками, имели разные дизайны, и их характеристики были достаточно разными, чтобы ухудшить производительность массива. Политика, позволяющая восстановить отдельные преобразователи, была затем принесена в жертву, и вместо этого была выбрана «расходная модульная конструкция», герметизируемые неретатные модули, что устраняет проблему с уплотнениями и другими посторонними механическими частями. [ 22 ]
Императорский японский флот в начале Второй мировой войны использовал проекторы на основе кварца . Они были большими и тяжелыми, особенно если они предназначены для более низких частот; Набор для типа 91, работающий при 9 кГц, имел диаметр 30 дюймов (760 мм) и был привлечен осциллятором с мощностью 5 кВт и 7 кВ амплитуды. Проекторы типа 93 состояли из твердых бутербродов кварца, собранных в сферические чугунные тела. Сонары типа 93 были позже заменены на 3 типа, который последовал за немецким дизайном и использовали магнитострикционные проекторы; Проекторы состояли из двух прямоугольных идентичных независимых единиц в чугунном прямоугольном теле около 16 на 9 дюймов (410 мм × 230 мм). Обнаженная площадь была половина длины волны шириной и три длины волны высотой. Магнитострикционные ядра были изготовлены из 4 мм штампов никеля, а затем с сплава железа-алюминия с содержанием алюминия между 12,7% и 12,9%. Мощность была предоставлена из 2 кВт при 3,8 кВ, с поляризацией от 20 В, 8 A DC -источника.
Пассивные гидрофоны Имперского Японского ВМС были основаны на конструкции движущейся катушки, рошель соляных пьезо-преобразователей и углеродных микрофонах . [ 23 ]
Более поздние события в преобразователях
Магнитострикционные преобразователи были преследованы после Второй мировой войны в качестве альтернативы пьезоэлектрическим. Никелевые свитки-кольцевые преобразователи использовались для высокоэффективных работ с низкой частотой, с размером до 13 футов (4,0 м) в диаметре, вероятно, крупнейших индивидуальных сонарных преобразователей. Преимущество металлов - их высокая прочность на растяжение и низкий входной электрический импеданс, но они имеют электрические потери и более низкий коэффициент связи, чем PZT, чья прочность на растяжение может быть увеличена путем предварительного напряжения . Другие материалы также были опробованы; Несталлические ферриты были многообещающими для их низкой электрической проводимости, что приводило к низким вихревого тока потери , MetGlas предлагал высокий коэффициент связи, но они были уступают PZT в целом. В 1970-х годах были обнаружены соединения редкоземельных земель и железа с превосходными магнитомеханическими свойствами, а именно сплавным сплавом Terfenol-D . Это сделало возможные новые конструкции, например, гибридный магнитостриктивный пизоэлектрический преобразователь. Самым последним из этих улучшенных магнитострикционных материалов является Галфенол .
Другие типы преобразователей включают в себя переменную передачу (или перемещающуюся армию, или электромагнитные) преобразователи, где магнитная сила действует на поверхности зазоров и перемещающуюся катушку (или электродинамические) преобразователи, аналогичные обычным динамикам; Последние используются в подводной калибровке звука из -за их очень низких частот резонанса и плоских широкополосных характеристик над ними. [ 24 ]
Активный сонар

Active Sonar использует звуковой передатчик (или проектор) и приемник. Когда они находятся в одном месте, это моностатическая работа . Когда передат и приемник разделены, это бистатическая работа . [ 25 ] Когда используется больше передатчиков (или более приемников), опять же пространственно разделено, это многостатическая работа . Большинство сонаров используются моностатически с одним и тем же массивом, часто используемым для передачи и приема. [ 26 ] Активные поля Sonobuoy могут работать мультистатически.
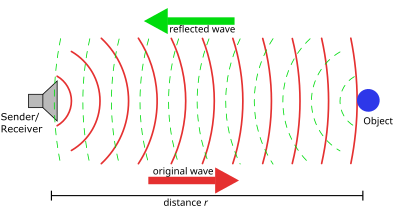
Активный сонар создает пульс звука, часто называемый «пинг», а затем слушает отражения ( эхо ) пульса. Этот импульс звука, как правило, создается в электронном виде с использованием сонарного проектора, состоящего из генератора сигналов, усилителя мощности и электроакустического преобразователя/массива. [ 27 ] Преобразователь - это устройство, которое может передавать и получать акустические сигналы («пинги»). Режим луча обычно используется для концентрации акустической мощности в луч, которая может быть охвачена, чтобы покрыть необходимые углы поиска. Как правило, электроакустические преобразователи имеют тип Тонпильца , и их конструкция может быть оптимизирована для достижения максимальной эффективности по самой широкой пропускной способности, чтобы оптимизировать производительность общей системы. Иногда акустический импульс может создаваться другими способами, например, химически, используя взрывчатые вещества, воздушные камни или источники звука плазмы.
Чтобы измерить расстояние до объекта, время от передачи импульса к приему измеряется и преобразуется в диапазон с использованием известной скорости звука. [ 28 ] Для измерения подшипника используются несколько гидрофонов , и набор измеряет относительное время прибытия по каждому или с помощью массива гидрофонов, измеряя относительную амплитуду в балках, образованных в процессе, называемом формированием луча . Использование массива уменьшает пространственный отклик, так что для обеспечения широкого покрытия многочисленных систем. Целевой сигнал (если присутствует) вместе с шумом затем передается через различные формы обработки сигнала , [ 29 ] которые для простых сонаров могут быть просто измерением энергии. Затем он представлен в какой -то форме устройства принятия решения, которое вызывает выходной сигнал либо требуемый сигнал, либо шум. Это устройство принятия решения может быть оператором с наушниками или дисплеем, или в более сложных сонарах, эта функция может выполняться программным обеспечением. Дальнейшие процессы могут быть проведены для классификации цели и локализации ее, а также измерения его скорости.
Импульс может быть на постоянной частоте или чирп изменения частоты (чтобы обеспечить сжатие импульса при приеме). Простые сонары обычно используют первое с фильтром, достаточно широким, чтобы покрыть возможные изменения допплера из -за движения цели, в то время как более сложные, как правило, включают последнюю технику. Поскольку цифровая обработка стала доступной импульсной сжатием, обычно осуществляется с использованием методов цифровой корреляции. Военные сонары часто имеют несколько лучей, чтобы обеспечить всестороннюю крышку, в то время как простые покрывают только узкую дугу, хотя луч может быть повернут относительно медленно, путем механического сканирования.
В частности, когда используются одночастотные передачи, эффект допплера может использоваться для измерения радиальной скорости цели. Разница в частоте между передаваемым и принятым сигналом измеряется и преобразуется в скорость. Поскольку доплеровские сдвиги могут быть введены с помощью приемника или целевого движения, необходимо выполнить пособие для радиальной скорости поисковой платформы.
Один полезный маленький сонар по внешнему виду похож на водонепроницаемый фонарик. Голова направляется в воду, нажата кнопка, а устройство отображает расстояние до цели. Другой вариант - это « рыбоводник », на котором показывается небольшой дисплей с косяками рыбы. Некоторые гражданские сонары (которые не предназначены для стелс), подходят к активным военным сонарам в способности, с трехмерными проявлениями района возле лодки.
Когда активный сонар используется для измерения расстояния от преобразователя до дна, он известен как звучание эхо . Аналогичные методы могут использоваться вверх для измерения волны.
Активный сонар также используется для измерения расстояния через воду между двумя преобразователями сонара или комбинацией гидрофона (подводного акустического микрофона) и проектора (подводной акустической динамики). Когда гидрофон/преобразователь получает определенный сигнал опроса, он отвечает, передавая конкретный сигнал ответа. Для измерения расстояния один преобразователь/проектор передает сигнал опроса и измеряет время между этой передачей и получением другого ответа преобразователя/гидрофонов. Разница во времени, масштабируемая скоростью звука через воду и деленная на два, - это расстояние между двумя платформами. Этот метод, когда используется с несколькими преобразователями/гидрофонами/проекторами, может рассчитать относительные положения статических и движущихся объектов в воде.
В боевых ситуациях враг может обнаружить активный импульс и выявить позицию подводной лодки на максимальном расстоянии, на котором сама подводная лодка может определить контакт и дать подсказки относительно идентичности подводной лодки на основе характеристик исходящего пинга. По этим причинам активный сонар не часто используется военными подводными лодками.
Очень направленный, но низкоэффективный тип сонара (используемый рыболовством, военными и для безопасности порта) использует сложную нелинейную особенность воды, известную как нелинейный сонар, виртуальный датчик, известный как параметрический массив .
Проект Артемида
Project Artemis был экспериментальным проектом по исследованиям и разработкам в конце 1950-х до середины 1960-х годов, чтобы изучить акустическое распространение и обработку сигналов для низкочастотной активной системы сонар, которая может использоваться для наблюдения за океаном. Вторичной целью было изучение инженерных задач фиксированных активных нижних систем. [ 30 ] Приемный массив был расположен на склоне банка Plantagnet от Бермудских островов. Активные источники были развернуты из переоборудованного танкера мировой мировой войны USNS Capistrano . [ 31 ] Элементы Артемиды использовались экспериментально после прекращения основного эксперимента.
Транспондер
Это активное устройство сонара, которое получает конкретный стимул и немедленно (или с задержкой) повторяет принятый сигнал или предопределенный. Преобразования могут использоваться для дистанционной активации или восстановления подводного оборудования. [ 32 ]
Прогноз производительности
Цель сонара небольшая по сравнению с сферой , сосредоточенной вокруг эмиттера, на которой она находится. Следовательно, мощность отраженного сигнала очень низкая, на несколько порядков меньше, чем исходный сигнал. Даже если отраженный сигнал имел ту же силу, следующий пример (использование гипотетических значений) показывает проблему: Предположим, что система сонар может излучать 10000 Вт/м. 2 сигнал при 1 м и обнаружение 0,001 Вт/м 2 сигнал При 100 м сигнал будет 1 Вт/м 2 (из-за закона об обратном квадрате ). Если весь сигнал отражается от 10 м. 2 цель, она будет на 0,001 Вт/м 2 Когда он достигает излучателя, то есть просто обнаруживается. Однако исходный сигнал останется выше 0,001 Вт/м. 2 до 3000 м. Любые 10 м 2 Цель между 100 и 3000 м с использованием аналогичной или лучшей системы сможет обнаружить импульс, но не будет обнаружена эмиттером. Детекторы должны быть очень чувствительными, чтобы забрать эхо. Поскольку исходный сигнал гораздо более мощный, он может быть обнаружен много раз дальше, чем вдвое больше диапазона сонара (как в примере).
Active sonar have two performance limitations: due to noise and reverberation. In general, one or other of these will dominate, so that the two effects can be initially considered separately.
In noise-limited conditions at initial detection:[33]
- SL − 2PL + TS − (NL − AG) = DT,
where SL is the source level, PL is the propagation loss (sometimes referred to as transmission loss), TS is the target strength, NL is the noise level, AG is the array gain of the receiving array (sometimes approximated by its directivity index) and DT is the detection threshold.
In reverberation-limited conditions at initial detection (neglecting array gain):
- SL − 2PL + TS = RL + DT,
where RL is the reverberation level, and the other factors are as before.
Hand-held sonar for use by a diver
- The LIMIS (limpet mine imaging sonar) is a hand-held or ROV-mounted imaging sonar for use by a diver. Its name is because it was designed for patrol divers (combat frogmen or clearance divers) to look for limpet mines in low visibility water.
- The LUIS (lensing underwater imaging system) is another imaging sonar for use by a diver.
- There is or was a small flashlight-shaped handheld sonar for divers, that merely displays range.
- For the INSS (integrated navigation sonar system)
Upward looking sonar
An upward looking sonar (ULS) is a sonar device pointed upwards looking towards the surface of the sea. It is used for similar purposes as downward looking sonar, but has some unique applications such as measuring sea ice thickness, roughness and concentration,[34][35] or measuring air entrainment from bubble plumes during rough seas. Often it is moored on the bottom of the ocean or floats on a taut line mooring at a constant depth of perhaps 100 m. They may also be used by submarines, AUVs, and floats such as the Argo float.[36]
Passive sonar
This section includes a list of general references, but it lacks sufficient corresponding inline citations. (October 2023) |
Passive sonar listens without transmitting.[37] It is often employed in military settings, although it is also used in science applications, e.g., detecting fish for presence/absence studies in various aquatic environments – see also passive acoustics and passive radar. In the very broadest usage, this term can encompass virtually any analytical technique involving remotely generated sound, though it is usually restricted to techniques applied in an aquatic environment.
Identifying sound sources
Passive sonar has a wide variety of techniques for identifying the source of a detected sound. For example, U.S. vessels usually operate 60 Hertz (Hz) alternating current power systems. If transformers or generators are mounted without proper vibration insulation from the hull or become flooded, the 60 Hz sound from the windings can be emitted from the submarine or ship. This can help to identify its nationality, as all European submarines and nearly every other nation's submarine have 50 Hz power systems. Intermittent sound sources (such as a wrench being dropped), called "transients," may also be detectable to passive sonar. Until fairly recently,[when?] an experienced, trained operator identified signals, but now computers may do this.
Passive sonar systems may have large sonic databases, but the sonar operator usually finally classifies the signals manually. A computer system frequently uses these databases to identify classes of ships, actions (i.e. the speed of a ship, or the type of weapon released and the most effective countermeasures to employ), and even particular ships.
Noise limitations
Passive sonar on vehicles is usually severely limited because of noise generated by the vehicle. For this reason, many submarines operate nuclear reactors that can be cooled without pumps, using silent convection, or fuel cells or batteries, which can also run silently. Vehicles' propellers are also designed and precisely machined to emit minimal noise. High-speed propellers often create tiny bubbles in the water, and this cavitation has a distinct sound.
The sonar hydrophones may be towed behind the ship or submarine in order to reduce the effect of noise generated by the watercraft itself. Towed units also combat the thermocline, as the unit may be towed above or below the thermocline.
The display of most passive sonars used to be a two-dimensional waterfall display. The horizontal direction of the display is bearing. The vertical is frequency, or sometimes time. Another display technique is to color-code frequency-time information for bearing. More recent displays are generated by the computers, and mimic radar-type plan position indicator displays.
Performance prediction
Unlike active sonar, only one-way propagation is involved. Because of the different signal processing used, the minimal detectable signal-to-noise ratio will be different. The equation for determining the performance of a passive sonar is[38][33]
- SL − PL = NL − AG + DT,
where SL is the source level, PL is the propagation loss, NL is the noise level, AG is the array gain and DT is the detection threshold. The figure of merit of a passive sonar is
- FOM = SL + AG − (NL + DT).
Performance factors
The detection, classification and localisation performance of a sonar depends on the environment and the receiving equipment, as well as the transmitting equipment in an active sonar or the target radiated noise in a passive sonar.
Sound propagation
Sonar operation is affected by variations in sound speed, particularly in the vertical plane. Sound travels more slowly in fresh water than in sea water, though the difference is small. The speed is determined by the water's bulk modulus and mass density. The bulk modulus is affected by temperature, dissolved impurities (usually salinity), and pressure. The density effect is small. The speed of sound (in feet per second) is approximately:
- 4388 + (11.25 × temperature (in °F)) + (0.0182 × depth (in feet)) + salinity (in parts-per-thousand ).
This empirically derived approximation equation is reasonably accurate for normal temperatures, concentrations of salinity and the range of most ocean depths. Ocean temperature varies with depth, but at between 30 and 100 meters there is often a marked change, called the thermocline, dividing the warmer surface water from the cold, still waters that make up the rest of the ocean. This can frustrate sonar, because a sound originating on one side of the thermocline tends to be bent, or refracted, through the thermocline. The thermocline may be present in shallower coastal waters. However, wave action will often mix the water column and eliminate the thermocline. Water pressure also affects sound propagation: higher pressure increases the sound speed, which causes the sound waves to refract away from the area of higher sound speed. The mathematical model of refraction is called Snell's law.
If the sound source is deep and the conditions are right, propagation may occur in the 'deep sound channel'. This provides extremely low propagation loss to a receiver in the channel. This is because of sound trapping in the channel with no losses at the boundaries. Similar propagation can occur in the 'surface duct' under suitable conditions. However, in this case there are reflection losses at the surface.
In shallow water propagation is generally by repeated reflection at the surface and bottom, where considerable losses can occur.
Sound propagation is affected by absorption in the water itself as well as at the surface and bottom. This absorption depends upon frequency, with several different mechanisms in sea water. Long-range sonar uses low frequencies to minimise absorption effects.
The sea contains many sources of noise that interfere with the desired target echo or signature. The main noise sources are waves and shipping. The motion of the receiver through the water can also cause speed-dependent low frequency noise.
Scattering
When active sonar is used, scattering occurs from small objects in the sea as well as from the bottom and surface. This can be a major source of interference. This acoustic scattering is analogous to the scattering of the light from a car's headlights in fog: a high-intensity pencil beam will penetrate the fog to some extent, but broader-beam headlights emit much light in unwanted directions, much of which is scattered back to the observer, overwhelming that reflected from the target ("white-out"). For analogous reasons active sonar needs to transmit in a narrow beam to minimize scattering.

The scattering of sonar from objects (mines, pipelines, zooplankton, geological features, fish etc.) is how active sonar detects them, but this ability can be masked by strong scattering from false targets, or 'clutter'. Where they occur (under breaking waves;[40] in ship wakes; in gas emitted from seabed seeps and leaks[41] etc.), gas bubbles are powerful sources of clutter, and can readily hide targets. TWIPS (Twin Inverted Pulse Sonar)[42][43][44] is currently the only sonar that can overcome this clutter problem.

This is important as many recent conflicts have occurred in coastal waters, and the inability to detect whether mines are present or not present hazards and delays to military vessels, and also to aid convoys and merchant shipping trying to support the region long after the conflict has ceased.[42]
Target characteristics
The sound reflection characteristics of the target of an active sonar, such as a submarine, are known as its target strength. A complication is that echoes are also obtained from other objects in the sea such as whales, wakes, schools of fish and rocks.
Passive sonar detects the target's radiated noise characteristics. The radiated spectrum comprises a continuous spectrum of noise with peaks at certain frequencies which can be used for classification.
Countermeasures
Active (powered) countermeasures may be launched by a vessel under attack to raise the noise level, provide a large false target, and obscure the signature of the vessel itself.
Passive (i.e., non-powered) countermeasures include:
- Mounting noise-generating devices on isolating devices.
- Sound-absorbent coatings on the hulls of submarines, for example anechoic tiles.
Military applications
Современная военно-морская война широко использует как пассивного, так и активного сонара из водных судов, самолетов и фиксированных установок. Хотя активный сонар использовался Surface Craft во Второй мировой войне , подводные лодки избегали использования активного сонара из -за потенциала для выявления их присутствия и положения вражеских сил. Тем не менее, появление современной обработки сигналов позволило использовать пассивный сонар в качестве основного средства для поиска и обнаружения. подразделение японской компании Toshiba В 1987 году, как сообщается, [45] sold machinery to the Soviet Union that allowed their submarine propeller blades to be milled so that they became radically quieter, making the newer generation of submarines more difficult to detect.
Использование активного сонара подводной подводной лодкой для определения подшипника крайне редко и не обязательно предоставит высококачественную информацию о подводных лодках подводной команде по управлению огнем. Тем не менее, использование активного сонара на поверхностных кораблях очень распространено и используется подводными лодками, когда тактическая ситуация диктует, что более важно определить положение враждебной подводной лодки, чем скрыть свою собственную позицию. С помощью поверхностных кораблей можно предположить, что угроза уже отслеживает корабль со спутниковыми данными, так как любое судно вокруг излучающего сонара обнаружит излучение. Услышав сигнал, легко идентифицировать используемое оборудование сонара (обычно с его частотой) и его положение (с энергией звуковой волны). Активный сонар похож на радар, в то время как он позволяет обнаруживать цели в определенном диапазоне, он также позволяет обнаружить эмиттер в гораздо большем диапазоне, что нежелательно.
Поскольку активный сонар раскрывает присутствие и положение оператора и не допускает точную классификацию целей, он используется быстрым (плоскостями, вертолетами) и шумными платформами (большинство поверхностных кораблей), но редко подводными подводными лодками. Когда активный сонар используется поверхностными кораблями или подводными лодками, он обычно активируется очень кратко в прерывистые периоды, чтобы минимизировать риск обнаружения. Следовательно, активный сонар обычно считается резервной копией пассивного сонара. В самолетах активный сонар используется в форме одноразовых сонобуоя , которые сброшены в районе патрулирования самолета или вблизи возможных контактов с вражеским сонаром.
Пассивный сонар имеет несколько преимуществ, что наиболее важно, что он молчит. Если целевой излучаемый уровень шума достаточно высок, он может иметь больший диапазон, чем активный сонар, и позволяет идентифицировать цель. Поскольку любой моторизованный объект издает некоторый шум, он может быть в принципе, в зависимости от уровня испускаемого шума и уровня окружающего шума в области, а также используемой технологии. Чтобы упростить, пассивный сонар «видит» вокруг корабля, использующего его. На подводной лодке пассивный сонар, установленный на носу, обнаруживает в направлениях около 270 °, центрированной на выравнивании корабля, на корпус, на котором набрасывались около 160 ° с каждой стороны, и буксируемого массива полного 360 °. Невидимые районы связаны с собственным вмешательством корабля. Как только сигнал обнаружен в определенном направлении (что означает, что что -то издает звук в этом направлении, это называется широкополосным обнаружением), можно увеличить и проанализировать полученный сигнал (узкий анализ). Обычно это делается с использованием преобразования Фурье, чтобы показать различные частоты, составляющие звук. Поскольку каждый двигатель издает определенный звук, легко идентифицировать объект. Базы данных уникальных звуков двигателя являются частью того, что известно как Акустический интеллект или ацинт.
цели Другое использование пассивного сонара - определить траекторию . Этот процесс называется анализом целевого движения (TMA), а результирующее «решение» - это диапазон, курс и скорость цели. TMA выполняется путем маркировки, в каком направлении звук идет в разное время, и сравнивая движение с движением собственного корабля оператора. Изменения в относительном движении анализируются с использованием стандартных геометрических методов, а также некоторые предположения об ограничивающих случаях.
Пассивный сонар скрытный и очень полезный. Тем не менее, это требует высокотехнологичных электронных компонентов и является дорогостоящим. Обычно он развертывается на дорогих кораблях в виде массивов для усиления обнаружения. Поверхностные корабли используют его для хорошего эффекта; Он даже лучше используется подводными лодками , и он также используется самолетами и вертолетами, в основном для «неожиданного эффекта», поскольку подводные лодки могут скрываться под термическими слоями. Если командир подводной подводной лодки считает, что он один, он может приблизить свою лодку ближе к поверхности и быть легче обнаружить, или идти глубже и быстрее, и, таким образом, издавать больше звука.
Примеры приложений сонар в военном использовании приведены ниже. Многие из гражданских использования, приведенных в следующем разделе, также могут быть применимы к военно -морскому использованию.
Анти-подключатая война

До недавнего времени судовые сонары обычно делали с массивами, установленными на корпусе, либо среди кораблей, либо у лука. Вскоре после их первоначального использования было обнаружено, что требовалось средство снижения шума потока. Первые были сделаны из холста на рамке, затем использовались стальные. Теперь купола обычно изготовлены из армированного пластика или резины под давлением. Такие сонары в основном активны в работе. Примером обычного сонара, установленного на корпусе, является SQS-56.
Из -за проблем шума корабля также используются буксируемые сонары. Это имеет преимущество в том, что они могут быть более глубже в воде, но имеют ограничения на их использование на мелководье. Они называются буксируемыми массивами (линейными) или сонарами с переменной глубиной (VDS) с 2/3D массивами. Проблема заключается в том, что лебедки, необходимые для их развертывания/восстановления, большие и дорогие. Наборы VDS в основном активны в работе, в то время как буксируемые массивы являются пассивными.
Примером современного активного пассивного корабля буксируемого сонара является Sonar 2087, сделанный Thales Underwater Systems .
Торпеды
Современные торпеды обычно оснащены активным/пассивным сонаром. Это может быть использовано для дома непосредственно на цель, но Hape Homing также используются торпеды . Ранним примером акустического Гомера была торпеда Марка 37 .
Торпедные контрмеры могут быть отбуксированы или свободны. Ранним примером было немецкое Sieglinde устройство , в то время как жирный жирный собой химическое устройство. Широко используемым американским устройством было буксируемое NIXIE AN/SLQ-25, в то время как мобильный симулятор подводных лодок (MOSS) был бесплатным устройством. Современной альтернативой системе Nixie является британская система защитной системы Королевского флота S2170 .
Шахты
Шахты могут быть оснащены сонаром для обнаружения, локализации и распознавания требуемой цели. Примером является похитительный шахта .
Шахтные контрмеры
Шон -контрмеза (MCM) Sonar, иногда называемый «Mine и Sonar избегая препятствий (MOAS)», является специализированным типом сонара, используемого для обнаружения небольших объектов. Большинство сонаров MCM установлены на корпусе, но несколько типов - дизайн VDS. Примером установленного на корпус MCM Sonar является тип 2193, в то время как SQQ-32 Sonar Sonar и Systems Type 2093 являются проектами VDS.
Подводная навигация
Подводные лодки полагаются на сонар в большей степени, чем поверхностные корабли, так как они не могут использовать радар в воде. Сонарные массивы могут быть установлены или отбуксированы. Информация, установленная на типичных приходах, приведена в подводной лодке Oyashio -класс и Swiftsure подводной лодке .
Самолеты

Вертолеты могут использоваться для антисвязной войны путем развертывания областей активных пассивных сонобуей или могут управлять погружением сонара, такого как AQS-13 . Самолет с фиксированным крылом также может развернуть Sonobuoys и иметь большую выносливость и способность их развертывания. Обработка с сонобуоя или погружного сонара может быть на самолете или на корабле. Погружение сонара имеет преимущество в том, что он развертывается до глубины, соответствующих ежедневным условиям. Вертолеты также использовались для шахтных миссий по контрмеры с использованием буксируемых сонаров, таких как AQS-20A .
Подводные сообщения
Выделенные сонары могут быть приспособлены к кораблям и подводным лодкам для подводной связи.
Океанское наблюдение
Соединенные Штаты создали систему пассивных систем с фиксированным океаном в 1950 году с классифицированной системы наблюдения за звуком (SOSUS) с американской телефонной и телеграфной компанией (AT & T), а ее исследовательские исследования Bell Laboratories и западные электрические производственные организации заключаются на разработку и развитие и развитие и развитие и развитие и развитие и разработка и разработка и разработка и разработка и разработка и разработка и установка. Системы эксплуатировали канал SOFAR , также известный как глубокий звуковой канал, где минимум звуковой скорости создает волноводад , в котором низкочастотный звук проходит тысячи миль. Анализ был основан на звуковом спектрографе AT & T, который преобразовал звук в визуальную спектрограмму, представляющую анализ звука, который был разработан для анализа речи и модифицирован для анализа низкочастотных подводных звуков. Этот процесс был низкочастотным анализом и записи , а оборудование называлось низкочастотным анализатором и рекордером, как с аббревиатурой LOFAR. Исследование LOFAR было названо Иезавелью и привело к использованию воздушных и поверхностных систем, особенно сонобуоя, используя процесс, а иногда и использовал «Иезавель» на их имя. [ 46 ] [ 47 ] [ 48 ] [ 49 ] Предлагаемая система дала такое обещание обнаружения подводных лодок, что ВМС приказал немедленные шаги для реализации. [ 47 ] [ 50 ]

Между установкой тестового массива с последующим полномасштабным, сорок элементом, прототипом операционного массива в 1951 и 1958 годах были установлены в Атлантике, а затем в Тихоокеанском регионе в рамках проекта «Несоотецированное название» . Первоначальные системы были прекращены на классифицированных береговых станциях, назначенных военно -морским объектом (NAVFAC), объяснены как «исследования океана», чтобы охватить свою классифицированную миссию. Система была обновлена несколько раз с более продвинутым кабелем, позволяющим установить массивы в океанских бассейнах и модернизированной обработки. Шор -станции были устранены в процессе консолидации и перенаправления массивов в центральные центры обработки в 1990 -х годах. В 1985 году, когда новые мобильные массивы и другие системы стали эксплуатационными, название коллективной системы было изменено на интегрированную систему наблюдения за подводным путем (IUSS). В 1991 году миссия системы была рассекречена. За год до того, как Iuss Exignia была уполномочена для износа. Доступ был предоставлен некоторым системам для научных исследований. [ 46 ] [ 47 ]
Считается, что аналогичная система управлялась Советским Союзом.
Подводная безопасность
Сонар может быть использован для обнаружения лягушек и других скулыжных дайверов . Это может быть применимо вокруг кораблей или на входах в порты. Активный сонар также может быть использован в качестве сдерживающего фактора и/или механизма отключения. Одним из таких устройств является система Cerberus .

Ручной сонар
Limpet Mine Imaging Sonar (Limis) -это ручная или ROV -сонар с визуализацией, предназначенным для патрульных дайверов (боевые лягушки или дайверы для очистки ) для поиска мин для ливней в воде с низкой видимостью .
Луис - еще один сонар визуализации для использования дайвером.
Интегрированная навигационная система Sonar System (INSS) представляет собой небольшой портативный фонарик в форме фонарика для дайверов, который отображает диапазон. [ 51 ] [ 52 ]
Перехватить сонар
Это сонар, предназначенный для обнаружения и обнаружения передач из враждебных активных сонаров. Примером этого является тип 2082, установленном на британских подводных лодках Vanguard -Class .
Гражданские заявки
Рыболовство
Рыбалка - это важная отрасль, которая видит растущий спрос, но World Catch Tonnage падает в результате серьезных проблем с ресурсами. Промышленность сталкивается с будущим продолжающейся мировой консолидации до тех пор, пока не может быть достигнута точка устойчивости . Тем не менее, консолидация рыболовного флота способствует повышению требований к сложной рыбе, находящей электронику, такую как датчики, зондерс и сонары. Исторически рыбаки использовали много различных методов для поиска и сбора рыбы. Тем не менее, акустическая технология была одной из самых важных движущих сил развития современного коммерческого рыболовства.
с воздухом рыбы Звуковые волны проходят иначе через рыбу, чем через воду, потому что купальный мочевой пузырь имеет необывающую плотность, чем морская вода. Эта разница плотности позволяет обнаруживать школы рыбы с помощью отраженного звука. Акустическая технология особенно хорошо подходит для подводных применений, поскольку звук движется дальше и быстрее под водой, чем в воздухе. Сегодня коммерческие рыболовные суда практически полностью полагаются на акустический сонар и эхолота для обнаружения рыбы. Рыбаки также используют активную технологию Sonar и Echo Sayder для определения глубины воды, нижнего контура и нижнего состава.

Такие компании, как Esonar, Raymarine , Marport Canada, Wesmar, Furuno, Krupp и Simrad, делают различные сонарские и акустические инструменты для коммерческой рыболовной промышленности в глубоком море . Например, чистые датчики проводят различные подводные измерения и передают информацию обратно получателю на борту судна. Каждый датчик оснащен одним или несколькими акустическими преобразователями в зависимости от его конкретной функции. Данные передаются от датчиков с использованием беспроводной акустической телеметрии и получают гидрофоном, установленным на корпусе. Аналоговые сигналы декодируются и преобразуются цифровым акустическим приемником в данные, которые передаются на мостовой компьютер для графического отображения на мониторе высокого разрешения.
Эхо звучит
Звук Echo - это процесс, используемый для определения глубины воды под кораблями и лодками. Тип активного сонара, звучание Echo - это передача акустического импульса непосредственно вниз к морскому дну, измеряя время между передачей и возвращением эха, после того, как попал в дно и отскочив обратно к своему кораблю происхождения. Акустический импульс испускается преобразователем, который также получает возвратный эхо. Измерение глубины рассчитывается путем умножения скорости звука в воде (в среднем 1500 метров в секунду) к времени между выбросом и возвратом эхо. [ 53 ]
Ценность подводной акустики для рыболовной промышленности привела к разработке других акустических инструментов, которые работают аналогично эхо-звучанию, но, поскольку их функция немного отличается от начальной модели эхо-звука, получили разные условия.
Чистое местоположение
Сеть эхолота - это эхо -эхолот с преобразователем, установленным на заголовке сети, а не на дне судна. Тем не менее, чтобы приспособить расстояние от преобразователя до устройства дисплея, что намного больше, чем у нормального эхо-звука, необходимо сделать несколько усовершенствований. Доступны два основных типа. Первый - это тип кабеля, в котором сигналы отправляются вдоль кабеля. В этом случае должно быть предоставление кабельного барабана, на котором можно перевозить, стрелять и укоренившееся кабель во время различных этапов работы. Второй тип-это сетевый Sounder без кабеля, такой как Trawler's Explorer Marport, в котором сигналы отправляются акустически между чистым и корпусным приемником-гидрофоном на судне. В этом случае не требуется кабельный барабан, но у преобразователя и приемника требуется сложная электроника.
Дисплей на сетевом эхолнезе показывает расстояние сетки от нижней части (или поверхности), а не глубины воды, как при преобразователе корпуса, установленного на корпусе эхо-звука . Обычно прикрепленная к заголовку сети, обычно можно увидеть ножную сеть, которая дает указание на чистую производительность. Также можно увидеть любую рыбу, проходящую в сетку, позволяя внести тонкие коррективы, чтобы поймать максимально возможную рыбу. В других рыболовствах, где важно количество рыбы в сети, датчики датчика ловли установлены на различных позициях на кончике трески сети. Поскольку концерт COD заполняет эти датчики датчика подъема, запускаются один за другим, и эта информация передается акустически для отображения мониторов на мосту судна. Шкипер может затем решить, когда перевозить сеть.
Современные версии сетевого Sounter, используя несколько преобразователей элементов, функционируют скорее на сонар, чем на эхо -эхолот, и показывают кусочки области перед сетью, а не просто вертикальный вид, который использовали первоначальные сетевые звуки.
Сонар-это эхо-звук с направленной способностью, которая может показывать рыбу или другие предметы вокруг сосуда.
ROV и UUV
Небольшие сонары были установлены на транспортных средствах с дистанционно управляемыми (ROV) и беспилотными подводными транспортными средствами (UUV), чтобы обеспечить свою работу в темных условиях. Эти сонары используются для того, чтобы смотреть впереди автомобиля. Долгосрочная система разведывания шахты является UUV для MCM-целей.
Расположение автомобиля
Сонары, которые действуют как маяки, приспособлены к самолетам, чтобы позволить их местоположение в случае аварии в море. Короткие и длинные базовые сонары могут использоваться для ухода за собой место, например LBL .
Протез для визуального нарушения
В 2013 году изобретатель в Соединенных Штатах представил боди «паука», оснащенный ультразвуковыми датчиками и тактичными системами обратной связи, который предупреждает владельца о входящих угрозах; позволяя им реагировать на злоумышленников, даже при завязанном глазах. [ 54 ]
Научные приложения
Оценка биомассы
Обнаружение рыбы и других морских и водных жизней, а также оценивают их отдельные размеры или общую биомассу с использованием активных методов сонара. Звуковые импульсы отражают любой объект, который имеет непрерывную плотность, чем окружающая среда. заполненный воздухом Это включает в себя рыбу, или, более конкретно, плавающий мочевой пузырь, на рыбе. [ 55 ] Эти эхо предоставляют информацию о размере рыбы, местоположении, изобилии и поведении. Это особенно эффективно для плавания рыб (например, сельдь, треска и Поллока) и менее полезно для рыб без них (например, акулы, скумбрия и камбала). [ 56 ] Данные из акваломов обычно обрабатываются иначе, чем данные об обнаружении морского дна или объекта, этот тип данных может быть обработан с помощью специализированного программного обеспечения. [ 55 ]
Измерение волны
Внизу эхо -эхолот, установленное на дне или на платформе, может использоваться для измерения высоты и периода волны. Из этой статистики условий поверхности в месте могут быть получены.
Измерение скорости воды
Специальные короткие сонары были разработаны, чтобы обеспечить измерения скорости воды.
Оценка нижнего типа
Были разработаны сонары, которые можно использовать для характеристики морского дна, например, в грязь, песок и гравий. Относительно простые сонары, такие как Echo Sowners, могут быть продвинуты в системы классификации морского дна с помощью дополнительных модулей, преобразование параметров Echo в тип отложений. Существуют различные алгоритмы, но все они основаны на изменениях энергии или формы отраженных пингов. Расширенный анализ классификации субстратов может быть достигнут с использованием калиброванных (научных) эхоуночечных и параметрических или нечетких логических анализов акустических данных.
Батиметрическое картирование

Сонары с боковым сканированием могут быть использованы для получения карт топографии морского дна ( батиметрия ), перемещая сонар через него чуть выше дна. Низкочастотные сонары, такие как Глория, использовались для широких обзоров континентального шельфа, в то время как высокочастотные сонары используются для более подробных исследований небольших областей.
установленные на корпусе, Многопользовательские эхоузанчители, на больших поверхностных сосудах производят полосы батиметрических данных почти в реальном времени. Один из примеров, общий инструмент «Seabeam», использует массив проекторов вдоль киля, чтобы Ensonify дно с помощью луча вентилятора. Сигналы из гидрофона, установленной на Athwartships, обрабатываются для синтеза нескольких виртуальных балок вентилятора, пересекающих луч проектора под прямыми углами.
Сонар визуализация
Создание двух и трехмерных изображений с использованием данных сонара.
Этот раздел нуждается в расширении . Вы можете помочь, добавив к этому . ( Июль 2024 г. ) |
Профилирование субботов
Мощные низкочастотные эхо-звуки были разработаны для обеспечения профилей верхних слоев дна океана. Одним из самых последних устройств является многопользовательский параметрический SBP от SES-2000, используемый в заливе Pucktro для подводных археологических целей. [ 57 ]
Обнаружение утечки газа с морского дна
Газовые пузырьки могут протекать с морского дна или близко к нему из нескольких источников. Они могут быть обнаружены как пассивными [ 58 ] и активный сонар [ 41 ] (показано на схематической фигуре [ 58 ] желтыми и красными системами соответственно).

Природные просачивания метана и углекислого газа происходят. [ 41 ] Газовые трубопроводы могут протекать, и важно иметь возможность определять, происходит ли утечка из углерода и хранения (CCSFS; например, истощенные масляные скважины, в которые хранится извлеченный атмосферный углерод). [ 59 ] [ 60 ] [ 61 ] [ 62 ] Количественная оценка количества утечки газа затруднена, и, хотя оценки могут быть использованы активным и пассивным сонаром, важно подвергать сомнению их точность из -за предположений, присущих таким оценкам из данных сонара. [ 58 ] [ 63 ]
Синтетическая апертура сонар
В лаборатории были построены различные сонары синтетической диафрагмы, а некоторые вступили в использование в системах охоты на шахты и поиска. Объяснение их операции приведено в сонаре синтетической апертуре .
Параметрический сонар
Параметрические источники используют нелинейность воды для генерации частоты разности между двумя высокими частотами. Виртуальный массив конечного огня образуется. Такой проектор имеет преимущества широкой полосы пропускания, узкой пропускной способности и при полной разработке и тщательно измерении, он не имеет очевидных боковых лобов: см. Параметрический массив . Его основным недостатком является очень низкая эффективность всего на несколько процентов. [ 64 ] PJ Westervelt суммирует задействованные тенденции. [ 65 ]
Сонар в внеземных контекстах
Использование как активного, так и пассивного сонара было предложено для различных внеземных сред. [ 66 ] Одним из примеров является Титан , где можно использовать активный сонар для определения глубины его углеводородных морей , [ 67 ] и пассивный сонар может быть использован для обнаружения метана . [ 68 ]
Предложения, которые не учитывают должного отношения между наземной и внеземной средой, могут привести к ошибочным измерениям. [ 69 ] [ 70 ] [ 71 ] [ 72 ] [ 73 ] [ 74 ]
Экологическое воздействие
| Часть серии на |
| Загрязнение |
|---|
 |
Влияние на морские млекопитающие

Исследования показали, что использование активного сонара может привести к массовым прожилкам морских млекопитающих . [ 75 ] Было показано, что киты , наиболее распространенные жертвы, находятся очень чувствительны к активному активному сонару в середине частоты. [ 76 ] Другие морские млекопитающие, такие как синий кит, также бегут от источника сонара, [ 77 ] в то время как военно -морская активность была предполагаемой наиболее вероятной причиной массового воздействия дельфинов. [ 78 ] Военно-морской флот США, который финансировал некоторые исследования, заявил, что результаты показали только поведенческие реакции на сонар, а не фактический вред, но они «оценивают эффективность [их] защитных мер морских млекопитающих в свете новых результатов исследований» Полем [ 75 ] В Верховном суде США в 2008 году военно -морской флот США в 2008 году отметил, что не было никаких случаев, когда сонар был окончательно, что это убедительно повредило или убил морского млекопитающего. [ 79 ]
Некоторые морские животные, такие как киты и дельфины , используют системы эхолокации , иногда называемые биосонаром для поиска хищников и добычи. Исследование влияния сонара на голубые киты в южной Калифорнии Bight показывает, что использование сонара в среднем частоте нарушает поведение кормления китов. Это указывает на то, что нарушение кормления и перемещения, вызванных сонар, может оказать значительное и ранее незарегистрированное воздействие на экологию кормления китов , индивидуальную физическую форму и здоровье населения. [ 80 ]
Обзор доказательств о массовых затяжных условиях лицевого кита, связанного с военно-морскими упражнениями, в которых использовался сонар, был опубликован в 2019 году. Он пришел к выводу, что последствия активного сонара в середине частот наиболее сильны на киты Кювье, но варьируются среди людей или популяций. В обзоре предполагается, что сила ответа отдельных животных может зависеть от того, имели ли они предварительное воздействие на сонар, и что в том, что симптомы декомпрессионной болезни были обнаружены в застрявших китах, которые могут быть результатом такого ответа на сонар. Он отметил, что на Канарских островах, где ранее сообщалось о нескольких странах, не было больше массовых целей, когда в этом районе были запрещены военно -морские упражнения, в течение которых использовались сонар, и рекомендовал продлить запрет на другие районы, где массовые помещения продолжают происходить. [ 81 ] [ 82 ]
Влияние на рыбу
Низкочастотный сонар может создать небольшой временный сдвиг в пороге слуха некоторой рыбы. [ 83 ] [ 84 ] [ А ]
Частоты и решения
Частоты сонаров варьируются от инфразвукового до мегахерца. Как правило, более низкие частоты имеют более длительный диапазон, в то время как более высокие частоты предлагают лучшее разрешение и меньший размер для данной направленности.
Для достижения разумной направленности частоты ниже 1 кГц обычно требуют большого размера, обычно достигаемых в качестве буксируемых массивов. [ 85 ]
Низкочастотные сонары слабо определены как 1–5 кГц, хотя некоторые военно -морские силы считают 5–7 кГц также как низкую частоту. Средняя частота определяется как 5–15 кГц. Другой стиль деления считает, что низкая частота составляет менее 1 кГц, а средняя частота - от 1 до 10 кГц. [ 85 ]
Американские сонары эпохи Второй мировой войны работали на относительно высокой частоте 20–30 кГц для достижения направления с разумно небольшими преобразователями, с типичным максимальным диапазоном работы 2500 ярдов. Послевоенные сонары использовали более низкие частоты для достижения большего диапазона; Например, SQS-4 работал при 10 кГц с диапазоном до 5000 ярдов. SQS-26 и SQS-53 работали в 3 кГц с диапазоном до 20 000 ярдов; Их купола имел размер ок. 60-футовый персональный лодка, предел верхнего размера для обычных сонаров корпуса. Достижение больших размеров путем конформного сонарного массива, разбросанного по корпусу, до сих пор не было эффективным, поскольку используются линейные или буксируемые массивы с более низкими частотами. [ 85 ]
Японские WW2 Sonars работали на различных частотах. Тип 91 с 30 -дюймовым кварцевым проектором работал на 9 кГц. Тип 93, с меньшими кварцевыми проекторами, работал на уровне 17,5 кГц (модель 5 при магнитострикции в 16 или 19 кГц) при властях от 1,7 до 2,5 киловатт, с диапазоном до 6 км. Более поздний тип 3 с немецко-дизайном магнитострикционных преобразователей работал в 13, 14,5, 16 или 20 кГц (по модели), используя двойные преобразователи (кроме модели 1, которая имела три одиночных), при 0,2 до 2,5 киловатт. Простой тип использовал 14,5 кГц магнитострикционные преобразователи при 0,25 кВт, приводящийся в движение емкостным разрядом вместо осцилляторов, с диапазоном до 2,5 км. [ 23 ]
Резолюция сонара является угловым; Объекты дальше друг от друга визуализируются с более низкими разрешениями, чем близлежащие.
Другой источник перечисляет диапазоны и резолюции по сравнению с частотами для Sidescan Sonars. 30 кГц обеспечивает низкое разрешение с диапазоном 1000–6000 м, 100 кГц дает среднее разрешение на 500–1000 м, 300 кГц дает высокое разрешение при 150–500 м, а 600 кГц дает высокое разрешение при 75–150 м. Более длительные сонары более отрицательно влияют на нехомогеничности воды. Некоторые среды, обычно мелкие воды вблизи побережья, имеют сложную местность со многими особенностями; Более высокие частоты становятся необходимыми. [ 86 ]
Смотрите также
- Перегороды (подводная лодка) - районы позади подводной лодки или корабля, где сонар не может услышать
- Гордон Юджин Мартин - американский физик (родился в 1925 году), физик сонар
Пояснительные заметки
- ^ Halvorsen et al. (2013) пришли к выводу, что наблюдаемые эффекты были «обычно небольшими, хотя рыба находилась рядом с сонаром и оставалась там на полную продолжительность трех тестовых сигналов».
Цитаты
- ^ Юрген Рохвер; Михаил Монаков; Михаил С. Монаков (2001). Сталинский океанский флот: советская военно-морская стратегия и программы судостроения, 1935–1953 . Психология пресса. п. 264. ISBN 9780714648958 .
- ^ Административная практика Глоссарий стандартизированных терминов . ВВС АФМ. Правительственная типография США. 1961. с. 129 Получено 2022-11-02 .
- ^ Jump up to: а беременный в "Сонар" . Энциклопедия Британская . Получено 18 января 2019 года .
- ^ Рэгг, Дэвид В. (1973). Словарь авиации (первое изд.). Скопа. п. 245. ISBN 9780850451634 .
- ^ Дэвид Рибас; Пере Ридао; Хосе Нейра (26 июля 2010 г.). Подводной удар по структурированной среде с использованием сонара визуализации . Springer Science & Business Media. ISBN 978-3-642-14039-6 .
- ^ Jump up to: а беременный Фахи, Фрэнк (1998). Основы шума и вибрации . Джон Джерард Уокер. Тейлор и Фрэнсис. п. 375. ISBN 978-0-419-24180-5 .
- ^ Томас Соседи, Дэвид Брэдли (ред.), Применяемая подводная акустика: Лейф Бьёрн , Elsevier, 2017, ISBN 0128112476 , стр. 8
- ^ Ma ainslie (2010), Принципы моделирования производительности сонара , Springer, p. 10
- ^ Jump up to: а беременный Хилл, Миннесота (1962). Физическая океанография . Аллан Р. Робинсон. Гарвардский университет издательство. п. 498.
- ^ W. Hackmann (1984), ищите и забастоте , Pn
- ^ Seitz, Frederick (1999). Космический изобретатель: Реджинальд Обри Фессенден (1866–1932) . Тол. 89. Американское философское общество. С. 41–46. ISBN 978-0-87169-896-4 .
- ^ Хендрик, Бертон Дж. (Август 1914 г.). «Беспроводной под водой: замечательное устройство, которое позволяет капитану корабля определять точное местоположение другого корабля даже в самом плотном тумане» . Работа мира: история нашего времени . XLIV (2): 431–434 . Получено 2009-08-04 .
- ^ «Отчет капитана Дж.Х. Куинана из USRC Miami о методе Echo Fringe обнаружения айсбергов и непрерывных звучания». Гидрографический бюллетень . 1914-05-13. (Цитируется в стенограмме NOAA, сотрудниками Центральной библиотеки в апреле 2002 г. Архивированный 2010-05-10 на машине Wayback .
- ^ «Ротари Боук» . Архивировано из оригинала 2007-06-26.
- ^ «Военно -морской словарь Второй мировой войны» . USS Abbot (DD-629) . Архивировано с оригинала 12 декабря 2013 года . Получено 12 ноября 2019 года .
- ^ W. Hackmann, Seek & Strike: Sonar, Anti-Submarine Warfare и Королевский флот 1914–54 (HMSO, Лондон, 1984).
- ^ Берн, Алан (1993). «Приложение 6». Боевой капитан: Фредерик Джон Уокер Р.Н. и Битва за Атлантику (2006, Kindle ed.). Барнсли: ручка и меч. ISBN 978-1-84415-439-5 .
- ^ Хоут: Глава XXXIX . Вашингтон. 1963.
- ^ «Устная история AIP: Фредерик Винтон Хант, часть II» . 23 февраля 2015 года.
- ^ Из автобиографического эскиза доктора Хортона и Департамента США ВМФ -подводной войны Центра войны
- ^ Хортон, Дж. Уоррен (1957). Основы сонара . Военно -морской институт США, Аннаполис, Мэриленд. п. 387.
- ^ Фрэнк Масса. Сонарские преобразователи: исторический архив 2015-04-18 на The Wayback Machine
- ^ Jump up to: а беременный «Японский сонар и Asdic» (PDF) . Архивировано из оригинала (PDF) 2015-09-24 . Получено 2015-05-08 .
- ^ Шерман, Чарльз Х; Батлер, Джон Л; Браун, Дэвид А (2008). «Преобразователи и массивы для подводного звучания» . Журнал Акустического общества Америки . 124 (3): 1385. Bibcode : 2008asaj..124.1385S . doi : 10.1121/1,2956476 . ISBN 9780387331393 Полем Архивировано с оригинала 2018-04-26.
- ^ «Основная система сонар (активная)» . fas.org . Архивировано из оригинала 2020-06-22 . Получено 2020-06-22 .
- ^ Бьёрнё, Лейф (2017). "Sonar Systems". Применяется подводная акустика . Elsevier. ISBN 978-0-12-811240-3 .
- ^ Такер, DG; Гази, Б.К. (1966). Применяется подводная акустика . Pergamon Press.
- ^ Министерство торговли США, Национальное управление океанического и атмосферного. «NOAA Ocean Explorer: Технология: Инструменты наблюдения: сонар» . OceanExplorer.noaa.gov . Архивировано из оригинала 2020-06-22 . Получено 2020-06-22 .
- ^ Авраам, да (2017). «Обработка сигнала». Применяется подводная акустика . Elsevier. ISBN 978-0-12-811240-3 .
- ^ МакКлинтон, в (7 сентября 1967 г.). Проект Artemnis Acoustic Source Summary Отчет (PDF) (отчет). Вашингтон, округ Колумбия: Военно -морская исследовательская лаборатория США. п. IV Архивировано (PDF) из оригинала 11 июня 2020 года . Получено 19 апреля 2020 года .
- ^ Эрскин, Фред Т. III (август 2013 г.). История подразделения акустики военно -исследовательской лаборатории первые восемь десятилетий 1923–2008 гг. (PDF) (отчет). Вашингтон, округ Колумбия: Военно -морская исследовательская лаборатория. С. 59–63. Архивировано (PDF) из оригинала 10 июня 2020 года . Получено 19 апреля 2020 года .
- ^ «Легкий приводной транспондер (лат)» . Сонардин . Архивировано из оригинала 2020-06-23 . Получено 2020-06-23 .
- ^ Jump up to: а беременный ISO 18405: 2017 Подводная акустика - терминология. Уравнение сонара, запись 3.6.2.3
- ^ Коннольли, Уильям (29 мая 2005 г.). «Стои: морской лед: что я делаю в свободное время :-)» . Стой Получено 19 октября 2017 года .
- ^ Fissel, DB; Марко, младший; Melling, H. (2008-01-01). «Достижения в технологии Sonar вверх, выглядящей вверх, для изучения процессов изменений в климате Арктического океана» . Журнал операционной океанографии . 1 (1): 9–18. Bibcode : 2008joo ..... 1 .... 9f . doi : 10.1080/1755876x.2008.11081884 . ISSN 1755-876x . S2CID 125961523 .
- ^ "Синий море думает" . Экономист: технологии ежеквартально . 10 марта 2018 года. Архивировано с оригинала 2020-11-09 . Получено 2020-11-16 .
- ^ «Наука звука» . www.usff.navy.mil . США командование силами флота . Получено 30 октября 2023 года .
- ^ MA Ainslie (2010), Принципы моделирования производительности сонара, Springer, p68
- ^ Лейтон, Тг; Коулз, DCH; Srokosz, M.; Белый, PR; Вульф, DK (2018). «Асимметричный перенос CO2 через сломанную поверхность моря» . Научные отчеты . 8 (1): 8301. Bibcode : 2018natsr ... 8.8301L . doi : 10.1038/s41598-018-25818-6 . PMC 5974314 . PMID 29844316 .
- ^ Вульф, DK; Thorpe, SA (1991). «Выход метана с морского дна вдоль западного Spitsbergen Continental края». J. Mar. Res . 49 (3): 435–466. doi : 10.1357/002224091784995765 .
- ^ Jump up to: а беременный в Вестбрук, ГК; Тэтчер, Ке; Ролинг, EJ; Пиотровский, Ам; Pälike, H.; Осборн, ах; Нисбет, например; Minshull, Ta; Lanoisellé, M.; Джеймс, RH; Hühnerbach, v.; Зеленый, д.; Фишер, Re; Крокер, AJ; Chabert, A.; Болтон, C.; Бесчзинска-Мёллер, а.; Берндт, C.; Aquilina, A. (2009). «Выход из метана с морского дна вдоль западного Spitsbergen Continental Anker» (PDF) . J. Mar. Res . 36 (15): L15608. Bibcode : 2009georl..3615608W . Doi : 10.1029/2009gl039191 .
- ^ Jump up to: а беременный в Лейтон, Тг; Finfer, DC; Белый, PR; Chua, G. - H.; Dix, JK (2010). «Подавление и классификацию беспорядка с использованием двойного инвертированного импульсного сонара (Twips)» (PDF) . Труды Королевского общества а . 466 (2124): 3453–3478. BIBCODE : 2010RSPSA.466.3453L . doi : 10.1098/rspa.2010.0154 . S2CID 111066936 .
- ^ Лейтон, Тг; Чуа, GH; White, PR (2012). «Вознаграждаются ли дельфины нелинейной математики при обработке возврата их сонара?» (PDF) . Труды Королевского общества а . 468 (2147): 3517–3532. BIBCODE : 2012RSPSA.468.3517L . doi : 10.1098/rspa.2012.0247 . S2CID 109255100 .
- ^ Лейтон, Тг; Finfer, DC; Чуа, GH; Белый, PR; Dix, JK (2011). «Подавление и классификацию беспорядка с использованием двойного инвертированного импульсного сонара в бодрствованиях корабля» (PDF) . Журнал Акустического общества Америки . 130 (5): 3431–7. Bibcode : 2011asaj..130.3431L . doi : 10.1121/1.3626131 . PMID 22088017 .
- ^ «Как Советская Акула изменила подводную войну» . Фоксстрот Альфа . 13 октября 2017 года . Получено 2020-01-15 .
- ^ Jump up to: а беременный Уитмен, Эдвард С. (зима 2005). «Сосус« секретное оружие »под наблюдением подсчета» . Подводная война . Тол. 7, нет. 2. Архивировано с оригинала 24 марта 2020 года . Получено 5 января 2020 года .
- ^ Jump up to: а беременный в «Интегрированная система наблюдения под наблюдения (IUSS) 1950 - 2010» . Ассоциация выпускников IUSS/CAESAR . Получено 22 мая 2020 года .
- ^ Munk, Walter H.; Spindel, Robert C.; Baggeroer, Arthur; Birdsall, Theodore G. (20 мая 1994 г.). «Случайный тест на острове острова» (PDF) . Журнал Акустического общества Америки . 96 (4). Акустическое общество Америки: 2330–2342. Bibcode : 1994saj ... 96.2330M . doi : 10.1121/1,410105 . Получено 26 сентября 2020 года .
- ^ Либерман, Филипп; Блумштейн, Шейла Э. (4 февраля 1988 г.). Физиология речи, восприятие речи и акустическая фонетика . Кембридж, Кембриджшир, Великобритания/Нью -Йорк: издательство Кембриджского университета. С. 51–52. ISBN 0521308666 Полем LCCN 87013187 . Получено 22 мая 2020 года .
- ^ «Происхождение Сосуса» . Командир, под наблюдением. Архивировано из оригинала 7 августа 2020 года . Получено 22 мая 2020 года .
- ^ Lent, K (2002). «Очень высокий резолюционный дайвер держал сонар» . Отчет в Управление военно -морских исследований . Архивировано с оригинала на 2008-10-08 . Получено 2008-08-11 .
{{cite journal}}: Cs1 maint: непредвзятый URL ( ссылка ) - ^ Крюгер, Кеннет Л. (2003-05-05). «Дивер диаграмма и графический дисплей» . Texas Univ в Austin Applied Research Labs. Архивировано из оригинала на 2009-08-13 . Получено 2009-01-21 .
{{cite web}}: Cs1 maint: непредвзятый URL ( ссылка ) - ^ «NOAA Ocean Explorer: Echo звучит чтение» . Архивировано с оригинала 2015-09-10.
- ^ «Этот костюм дает вам реальную жизнь паука» . Форбс . 23 февраля 2013 года. Архивировано с оригинала 27 февраля 2013 года . Получено 12 марта 2013 года .
- ^ Jump up to: а беременный Рыболовство, NOAA (2021-01-07). «Акустические методы обследования Хейка на западном побережье | NOAA Fisheries» . Ноаа . Получено 2023-07-29 .
- ^ Staugler, Betty (2019-10-15). «Невесомый в воде» . UF/IFAS Extension County . Получено 2023-07-29 .
- ^ Пиддин, Анджедж; Попа, Матеуш; Кубака, Мария; Яновски, Лукаш (2021-05-08). «Разведка и реконструкция средневековой гавани с использованием гидроакустики, 3-D мелководной сейсмической и подводной фотограмметрии: тематическое исследование Puck, южного Балтийского моря» . Археологическая проплекция . 28 (4): 527–542. Bibcode : 2021archp..28..527p . doi : 10.1002/arp.1823 .
- ^ Jump up to: а беременный в дюймовый Лейтон, Тг; White, PR (2012). «Количественная оценка утечек с подводным газом из зала и хранения углерода, из трубопроводов и от метановых просачиваний, по их акустическим выбросам» (PDF) . Труды Королевского общества а . 468 (2138): 485–510. BIBCODE : 2012RSPSA.468..485L . doi : 10.1098/rspa.2011.0221 . S2CID 108841954 .
- ^ Блэкфорд, Дж.; Stahl, H.; Bull, J.; и др. (28 сентября 2014 г.). «Обнаружение и воздействие утечки из подразделения глубокого геологического хранения углекислого газа» (PDF) . Изменение климата природы . 4 (11): опубликовано онлайн. Bibcode : 2014natcc ... 4.1011b . doi : 10.1038/nclimate2381 . S2CID 54825193 .
- ^ Бергес, BJ P; Лейтон, Тг; Уайт, PR (2015). «Пассивная акустическая количественная оценка газовых потоков во время экспериментов с контролируемым выбросом газа» . Международный журнал управления парниковыми газами . 38 : 64–79. Bibcode : 2015ijggc..38 ... 64b . doi : 10.1016/j.ijggc.2015.02.008 .
- ^ Hannis, S.; Чедвик, А.; Пирс, Дж.; и др. (2015). «Обзор оффшорного мониторинга для проектов CCS» (PDF) . Технический отчет IEAGHG 2015-02 (июль 2015 г.) : Copyright 2016 IEAGHG.
- ^ Hannis, S.; Чедвик, А.; Коннелли, Д.; и др. (2017). «Обзор мониторинга хранения оффшорных CO2: эксплуатационный и исследовательский опыт удовлетворения регулирующих и технических требований» . Энергетические процедуры . 114 : 5967–5980. doi : 10.1016/j.egypro.2017.03.1732 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2011). «Обзор рассеяния и вымирания поперечных сечений, факторов демпфирования и резонансных частот сферического газового пузыря» (PDF) . Журнал Акустического общества Америки . 130 (5): 3184–3208. Bibcode : 2011asaj..130.3184a . doi : 10.1121/1.3628321 . PMID 22087992 .
- ^ Ho berktay, Некоторые конечные эффекты амплитуды в подводной акустике в виртуальных машинах «Подводная акустика» 1967
- ^ Westervelt, PJ (1963). Параметрический акустический массив. Журнал Акустического общества Америки, 35 (4), 535-537.
- ^ Лейтон, Тг; Петкулеску А. (1 августа 2016 г.). «Акустические и родственные волны в внеземных средах» (PDF) . Журнал Акустического общества Америки . 140 (2): 1397–1399. Bibcode : 2016asaj..140.1397L . doi : 10.1121/1.4961539 . ISSN 0001-4966 . PMID 27586765 .
- ^ Arvelose & Lorenz (2013)
- ^ Лейтон, Тг; Белый, PR; Finfer, DC (2005). «Звуки морей в космосе» (PDF) . Материалы Международной конференции по подводным акустическим измерениям, технологиям и результатам, Ираклион, Крит, 28 июня-1 июля 2005 года . II : 833–840.
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2016). «Уравнения сонара для планетарного разведка» (PDF) . Журнал Акустического общества Америки . 140 (2): 1400–1419. Bibcode : 2016asaj..140.1400a . doi : 10.1121/1.4960786 . PMID 27586766 .
- ^ Лейтон, Тг; Finfer, DC; White, PR (2008). «Проблемы с акустикой на небольшой планете» (PDF) . ИКАРС . 193 (2): 649–652. Bibcode : 2008icar..193..649L . doi : 10.1016/j.icarus.2007.10.008 .
- ^ Цзян, J; Baik, K; Лейтон, Т.Г. (2011). «Акустическое затухание, фазовые и групповые скорости в заполненных жидкости трубки II: моделирование источников нейтронов и планетарных исследований» (PDF) . Журнал Акустического общества Америки . 130 (2): 695–706. Bibcode : 2011asaj..130..695J . doi : 10.1121/1,3598463 . PMID 21877784 .
- ^ Лейтон, Т.Г. (2009). «Эффекты нагрузки жидкости для акустических датчиков в атмосферах Марса, Венера, Титана и Юпитера» (PDF) . Журнал Акустического общества Америки . 125 (5): EL214–9. Bibcode : 2009asaj..125L.214L . doi : 10.1121/1,3104628 . PMID 19425625 .
- ^ Эйнсли, Массачусетс; Лейтон, Т.Г. (2009). «Рядом с резонансными пузырьковыми акустическими поперечными коррекциями, включая примеры океанографии, вулканологии и биомедицинского ультразвука» (PDF) . Журнал Акустического общества Америки . 126 (5): 2163–75. Bibcode : 2009asaj..126.2163a . doi : 10.1121/1.3180130 . PMID 19894796 .
- ^ Лейтон, Тг; Белый, PR; Finfer, DC (2012). «Возможности и проблемы при использовании внеземной акустики при исследовании океанов ледяных планетных тел» (PDF) . Земля, Луна и планеты . 109 (1–4): 99–116. BIBCODE : 2012EM & P..109 ... 91L . doi : 10.1007/s11038-012-9399-6 . S2CID 120569869 .
- ^ Jump up to: а беременный Дамиан Каррингтон (3 июля 2013 г.). «Исследования показывают, что киты бегут от военного сонара, приводящего к массовому облигациям» . Хранитель . Архивировано с оригинала 1 октября 2017 года.
- ^ Стейси Л. Деруйтер; Брэндон Л. Саутхолл; Джон Каламбумкидис; Уолтер MX Циммер; Динара Садикова; Эрин А. Фальконе; Ари С. Фридлаендер; Джон Э. Джозеф; Дэвид Моретти; Грегори С. Шорр; Лен Томас; Питер Л. Тайак (2013). «Первые прямые измерения поведенческих реакций Cuvier's Teared Thise to Active Active Sonar в середине частота» . Биологические письма . 9 (4): 20130223. DOI : 10.1098/rsbl.2013.0223 . PMC 3730631 . PMID 23825085 .
- ^ Goldbogen JA; Southall BL; Deruiter SL; Calambokidis J.; Friedlaender As; Хазен эль; Falcone EA; Schorr GS; Дуглас А.; Моретти диджей; Кибург С.; McKenna MF; Tyack PL (3 июля 2013 г.). «Голубые киты реагируют на смоделированный военный сонар на среднем частоте» . Труды Королевского общества б . 280 (765): 20130657. DOI : 10.1098/rspb.2013.0657 . PMC 3712439 . PMID 23825206 .
- ^ Jepson PD; Deaville R.; Acevedo-Whitehouse K.; и др. (30 апреля 2013 г.). «Что вызвало крупнейшее в Великобритании общее событие дельфина (Delphinus delphis) массовое мероприятие?» Полем Plos один . 8 (4): E60953. BIBCODE : 2013PLOSO ... 860953J . doi : 10.1371/journal.pone.0060953 . PMC 3640001 . PMID 23646103 .
- ^ Зима против национальных ресурсов Совета по защите защиты 2017-12-09 на машине Wayback № 07–1239., Октябрьский срок, 2008 г.
- ^ Goldbogen JA; Southall BL; Deruiter SL; Calambokidis J.; Friedlaender As; Хазен эль; Falcone EA; Schorr GS; Дуглас А.; Моретти диджей; Кибург С.; McKenna MF; Tyack PL (3 июля 2013 г.). «Голубые киты реагируют на смоделированный военный сонар на среднем частоте» . Труды Королевского общества б . 280 (765): 20130657. DOI : 10.1098/rspb.2013.0657 . PMC 3712439 . PMID 23825206 .
- ^ Бернальдо де Куйрос Y; Фернандес А; Baird RW; и др. (30 января 2019 г.). «Достижения в области исследований по воздействию антиловолонного сонара на ливень-киты» . Труды Королевского общества б . 286 (1895): 20182533. DOI : 10.1098/rspb.2018.2533 . PMC 6364578 . PMID 30963955 .
- ^ Бэтчелор, Том (30 января 2019 г.). «Ученые требуют запрета военного сонара, чтобы положить конец массовому китовым прудам» . Независимый .
- ^ Поппер Ан; Halvorsen MB; Кейн А.; Miller DL; Смит меня; Песня Дж.; Wysocki LE (2007). «Влияние высокоинтенсивного, низкочастотного активного сонара на радужную форель». Журнал Акустического общества Америки . 122 (1): 623–635. Bibcode : 2007asaj..122..623p . doi : 10.1121/1,2735115 . PMID 17614519 .
- ^ Halvorsen MB; Zeddies DG; Chicoine D.; Popper AN (2013). «Влияние низкочастотного воздействия военно-морского сонара на три вида рыб» . Журнал Акустического общества Америки . 134 (2): EL205 - EL210. Bibcode : 2013 Asaj..134L.205H . doi : 10.1121/1.4812818 . PMID 23927226 .
- ^ Søreide, Fredrik (2011-04-28). Корабли из глубины . Texas A & M University Press. ISBN 9781603442183 Полем Архивировано с оригинала 2018-04-26.
Общая библиография
- Дринг, Томас Р. (март 2018 г.). «Крутая кривая обучения: влияние технологии, обучения и тактики сонарных технологий на первые годы антилосмысной войны ВМС США во Второй мировой войне». Warship International . LV (январь 2018): 37–57. ISSN 0043-0374 .
- Хакманн, Виллем. Ищите и забастоте: сонар, анти-субмаренная война и Королевский флот 1914–54 . Лондон: офис канцелярских товаров Ее Величества, 1984. ISBN 0-11-290423-8 .
- Hackmann, Willem D. морская война 1914–1954 гг "Sonar Research и военно - . Исторические исследования в области физических и биологических наук 16#1 (январь 1986 г.) 83–110. doi : 10.2307/27757558 .
- Урик, RJ (1983). Принципы подводного звучания (3 -е издание). Los Altos: Peninsula Publishing. ISBN 9780932146625 . OCLC 1132503817 .
Рыболовство акустические ссылки
- Исследование акустики рыбного хозяйства (FAR) в Вашингтоне Университет Вашингтона
- Протоколы NOAA для рыболовных исследований акустики
- Акустика распакованная архивирована 2017-09-16 в The Machin Wayback
- «Акустика в рыболовстве и водной экологии»
- «Гидроакустический протокол - озера, водохранилища и низменные реки» (для оценки рыбы)
- Симмондс, Э. Джон и Д.Н. Макленнан. Промысловая акустика: теория и практика , второе издание. Серия рыб и водных ресурсов, 10. Оксфорд: Blackwell Science, 2003. ISBN 978-0-632-05994-2 .
Дальнейшее чтение
- «Канада: стабильные Sonics» , время , 28 октября 1946 года. Интересный отчет о 4800 устройствах Asdic Sonar, тайно изготовленных в Casa Loma , Торонто , во время Второй мировой войны. Получено 25 сентября 2009 г.
- «Радар Deep - Sonar» , Popular Science , ноябрь 1945, с. 84–87, 246, 250: одна из лучших общедоступных статей на эту тему
Внешние ссылки
- ФАКТЫ FFI: Сонары и морская обстановка Норвежского исследовательского учреждения (FFI)
- Отдаленное зондирование для управления прибрежными ранениями: одно лучевой сонар - Центр услуг на Агуастале, Национальное управление океанических и атмосферных ресурсов
